Futaba10C-10CH中文说明书2
Futba说明书

遥控模型直昇机的入门1、操作模式的选择:模式1(日本手MODE1)遥控器右边的操纵杆上下为动力油门的输出并连动螺距正负角度(注一)。
左右为副翼的动作(注二)。
遥控器左边的操纵杆上下为升降的动作(注三)。
左右为尾舵的动作(注四)。
模式3(反美国手MODE3)遥控器右边的操纵杆上下为动力油门的输出并连动螺距正负角度。
左右为尾舵的动作。
遥控器左边的操纵杆上下为升降的动作。
左右为副翼的动作。
模式1与?模式3遥控器摇杆摆放位置如照片所示。
模式2(美国手MODE2)遥控器右边的操纵杆上下为升降的动作。
左右为副翼的动作。
遥控器左边的操纵杆上下为动力油门的输出并连动螺距正负角度。
左右为尾舵的动作。
模式4(反日本手)遥控器右边的操纵杆上下为升降的动作。
左右为尾舵的动作。
遥控器左边的操纵杆上下为动力油门的输出并连动螺距正负角度。
左右为副翼的动作。
模式2与模式4?遥控器摇杆摆放位置如照片所示。
?注一:螺距为直昇机上昇与下降或正飞与倒飞主旋翼角度的变化形成的机体姿态,他的变化需有油门%数的配合,所以油门与螺距是连动於同一支摇杆。
这部分在选择遥控器的机型种类(直昇机模式)就会内部自动定义了!注二:副翼为直昇机机身向左或向右倾斜的形容!注三:升降为直昇机机身向前或向後倾斜的形容!注四:尾舵为直昇机机身正向或倒向时机体水平的360度顺时针或逆时针的旋转形容!以下为对於直昇机本身必须配有的方向性名称:油门螺距副翼升降尾舵以上四个动作(油门跟螺距是连动所以算是一动)就足以一般飞行操控直昇机也就是一般市面上的小四动直昇机属玩具类因螺旋桨转速不快且桨的材质较软动作较为迟钝!陀螺仪感度以上六个动作(因螺距有单独的设定曲线输出可做正倒飞姿态变化所以算一动,但他还是与油门连动,只因为设定上可以有自己的页面所以可算是一个动作)就足以一般飞行操控与3D动作的操控飞行,因为多了螺距曲线与陀螺仪锁定的功能,这就是基本的遥控模型3D直昇机所要有的动数(6动)!2、遥控器的选择:在上面的介绍有提到,基本的遥控模型3D直昇机所需用到的遥控器为6动!常有许多人疑惑遥控器的动数越多是不是就代表越好,其实这多少有连动关系存在!这里先解释一下动数为何?遥控器的几动是指最多可以应用在任一架直昇机上控制操作的数量,通常基本的3D花式型直昇机就包含了该有的6动,左右边摇杆就含了四个动作(油门、副翼、升降、尾巴),陀螺仪也需要一动、螺距也需要一动,其中因为油门跟螺距是连动关系,所以控制的摇杆为同一只!伺服机四颗(副翼、升降、尾巴、螺距)陀螺仪一棵、油门输出电子变速器一动(注一),共六动!另一个解释的方式就是接收机的插槽孔数,例如七动接收机最基本就会有7个插槽孔,而各孔插的就是伺服机或陀螺仪、定速器、RC控制开关等。
飞梦电子 2.4GHz 收发系统 说明书

飞梦电子2.4GHz 收发系统版本:V3.2更新日期:2010.9.5非常感谢您购买FD 2.4GHz发射模块与接收机,为了全面使用系统的潜在功能,我们建议您先认真阅读下面的说明。
敬告:1、航模不是玩具,请在规定的场地使用此产品。
未成年者请在监护人陪同下使用此产品。
2、任何电子产品都有可能失控,请在正确设置失控保护后使用此产品,如果发现产品有问题,请不要冒然使用,请及时和我们联系。
3、控制距离受环境的影响,请在远离障碍物的环境下测试。
空中距离测试比地面距离测试要好,我们的距离测试是基于地面的。
4、由于接收机灵敏度的提高,导致部分接收机与发射机之间会存在一定的堵塞情况(一般接收机的接收天线和发射机的发射天线之间的距离在3cm以内的情况下)。
这并不影响正常的使用。
5、由于IS-4R0为超轻接收机,对码方法与其他不同。
请仔细阅读第五部分。
6、当收发模块对码成功后,下次使用时则无需再重新对码。
7、请注意接收机侧面的正负极标记不要把电源插反;另外,电压保护器也是有正负极的,请不要插反。
8、对于操作者本身的操作失误造成的产品损坏,或者衍生出其他问题,一概与FD无关。
一、FD 2.4GHz V3收发系统飞梦2.4GHz V3收发系统严格遵循跳频通讯的标准(FHSS),在一个宽范围的频段内经常快速的转换频点,因此在实际使用时,周围环境里的干扰信号很难干扰发射机发出的信号,进而接收机可以稳定的工作,确保了使用的安全。
该系统具有可靠性高、兼容性好、更好的发射功率控制、更灵活的身份识别控制以及更低的功耗。
V3版发射模块采用了开关电源,正常工作电流小于30mA,非常省电。
同时,飞梦V3版发射模块是业界首个对用户开放固件(firmware)升级的产品。
二、FD 2.4GHz V3发射模块和接收机特点○收发系统的可控距离远、稳定○收发模块对码方便、快捷○接收机更轻、更小○可以任意设置失控时各个通道,包括油门通道的位置○自动扫描干净的频道进行信号传输○一键进入近距离测试状态,方便用户近距离检测系统的性能○采用超低功耗设计方案,使系统功耗降到最低三、FD 2.4GHz V3收发系统参数1 、FD 2.4GHz V3系统配置如下:发射模块(IS-8F/IS-8J)×1接收机(IS-8R /IS-6R /IS-4R/IS-4R0)×1发射天线3Db(IS-TA)×1接收机电压宝贝×12、发射模块兼容表Futaba 模组(IS-8F):Futaba:3PM/3PK/7U/8U/8J/9C/9Z/10C and FN series. Hitec: Optic 6/Eclipse 7.WFLY: WFT08/WFT 09.JR 模组(IS-8J):JR:347/388/783/U8/PCM10/PCM10S/PCM10SX/ PCM10IIS/ 8103/3810/J9303/MX-22/MX-24S/9X/9XII/11X3、发射模块参数模块尺寸:58.5×37.5×22mm(IS-8F)63.9×48.5×36.5mm(IS-8J)工作电压:6V~18V工作电流:30mA输出功率:<100mW分辨率:1μs通过下面的步骤,可以确保您的收发模块正确的设置与使用四、安装收发系统1、拆下发射机上的原来的模块2、放置FD 2.4GHz发射模块到模块接口并旋上2.4G发射天线,确保天线旋紧不松动。
ff10控说明书
Futaba10C2.4G简易手册模友马永昆自行编写一、接收机的模式选择这款设备的发射模式分7通模式和10通模式,分别对应不同的接收机,具体如下:7通模式(7CH):R607FS,R617FS,R616FFM,R6004FF。
10通模式(10CH):R6014HS,R6014FS,R6008HS,R608FS。
如果模式设置不正确,接收机找频将不会成功。
此功能设置在基本菜单的PARAMETER(参数)里设置。
并且,发射机在7通和10通模式之间变换,必须重新开启发射器电源。
二、发射器的设置1、进入菜单,长按MODEL键,多按一次会在基本设置和高级设置之间转换。
2、在不同选项间选择,有一个方向键,可以前后左右四个方向变换不同选项。
然后按转盘的PUSH键进入。
3、改变某个选项的参数,左右转动转盘可以改变参数,有的参数不需要确定,有的需要按PUSH来确定,设备会有提示。
4、退出菜单,按END键就可以了。
三、接收机对频打开发射器后,先关闭接收机电源,按住接收机的对频键(Easy Link),打开接收机电源,LED会闪亮红色,这时放开对频键,待LED 变成绿色长亮后,对频就完成了。
这时关闭接收机电源,再找开,确认无误后,就可以使用啦!四、几种常用操作1、模型设定按MODE键进入基本菜单(屏幕第一行会显示BASIC MENU),按PUSH键进入,按方向键到SELECT,转动转盘就可以从储存的15架模型中选择。
第二行COPY是复制模型参数,第三行NAME是为模型起个名字。
注意,变更了模型后,设备会提示,要长按PUSH才能确定,如果两个模型是在7通和10通之间变换,屏幕首页右上角的2.4G 小图标会闪动,这就需要重启设备了。
2、双比例设定D/R,EXP按MODE键,进入基本菜单。
选择D/R,EXP,按PUSH进入CH表示通道,用光标就可以选择D/R比例设置,有两个参数,用相应的操作杆来选择两个参数(如,调整一通时,用副翼杆左右来选择这两个参数)。
Futaba10C-10CH中文说明书(1)

2
目
简介.....................................5 支持与服务............................5 使用、出口和改装......................5 特殊标志的意义........................6 安全注意事项(操作前请务必阅读........6 对 10C 系统的简介.....................8 部件和技术特性.......................11 配件.................................12 发射机控制项和开关设置...............14 对镍镉电池进行充电...................18 操纵杆调整...........................19 调整显示屏的对比度...................19 改变模式.............................20 省电模式(只对 TM10 适用)............20 CP 卡的初始化和数据转换..............20 遥控设备的安装和范围检测.............21 飞行频率.............................26 发射机显示屏和按键...................27 警告和错误显示.......................28
滑翔机的功能菜单........................80 子目录...............................80 从基本的 4 通道滑翔机开始.............81 滑翔机的基础功能菜单.................83 模型类型(PARAMETER 子菜单).........83 电动机关闭 MOTOR CUT................84 滑翔机的高级功能菜单.................85 副翼/方向舵混控 AILE/RUDD............86 副翼,襟翼混控 AILE-FLAP(仅限于滑翔机 [2A+2F]).............................87 阻流板混控 SPOILER MIX................88 微调杆偏置 OFFSETs 附加飞行条件)......89 起飞延迟(仅限于滑翔机[1A+’F[)......90 翼型混控 CAMBER MIX.................90 翼型襟翼 CAMBER FLAP.................91 蝶式混控 BUTTERFLY...................92 通道 3 的功能选择(飞行条件/功能) ( CONDITION/FUNCTION) ...............93
futeba T8fg 遥控器说明书简要注释

模式调整方法:LINKAGE MENU—FREQUENCY—FASST (7CH/MULT)美国手/日本手改法 (STICK MODE):SYSTEM MENU—H/W SET—STICK MODER6008HS,Normal mode/High Speed mode模式辨别与切换:(1)辨别:不开控,开接收机指示灯红亮为普通模式,红绿都亮为高速模式。
(2)模式切换:不开控,按住按钮开接收机超过1秒,。
(3)对频:开控,开接收机,按住按钮超过2秒,等绿灯亮。
1副翼 Aileron2升降 Elevator3油门 Throttle4尾舵 Rudder5感度 Gyro6螺距 Pitch7定速 Governor8油针 Elevator2系统菜单:[TRAINER]教练:[DISPLAY]显示:对比度、背光[USER NAME]用户名:设置用户名称[H/W SET]H/W设置:摇杆开关反向、改手stick mode[INFO]产品信息:改语言油門螺距曲線改為5點(ff10有7點,5點自由移動)開關都改為3段延續fg的特色,每個開關都可以自由定義,以及組合邏輯開關陀螺儀感度或定速器感度這類的,都可以用個別的開關設定,例如你有5段感度,你可以分別在5個開關做設定(舉例)頻道功能可以自由調動、定義更重要的是~他有12FG以上才有的十字盤校正功能耶!!连杆菜单:[SERVO]舵机状态显示[MODEL SEL]模型选择、命名[MODEL TYPE]模型类型、斜盘类型[FREQUENCY]发射模式(7通/10通)、地区选择(法国/其他)[FUNCTION]开关分配[SUB-TRIM]辅助微调[REVERSE]反向[FAIL SAFE]失控保护[END POINT]行程调整EPA[THR CUT]发动机熄火[IDLE DOWN]降低怠速速度[SWASH RING]斜盘调圆[SWASH]斜盘设置、总距周期距行程、斜盘动作精确调整[T1-T4 SET]电子微调设置[DATA RESET]数据重置模型菜单:(一)常用用功能[SERVO]舵机状态显示[CONDITION]飞行模式开关分配、飞行模式切换延迟等[DUAL RATE]双重比率[PROG. MIX]混控程序[PITH CURVE]螺距曲线[THR CURVE]油门曲线[THR HOLD]油门锁定[SWASH MIX]斜盘混控[THR MIX]油门混控[PIT-->RUD]尾舵混控[FUEL MIX]油针混控[GYRO]陀螺仪[GOVERNOR]定速器(二)固定翼用功能(不玩固定翼,不太懂这个):THR DELAY]油门延迟[AIL DIFF.]不懂[FLAP SET.]不懂[AIL CMBFLP]不懂[AIL RUD]副翼――>尾舵[CAMBER MIX]不懂[ELE CAMBER]不懂[CMBFLP ELE]不懂[RUD AIL]尾舵――>副翼[RUD ELE]尾舵――>升降[SNAP ROLL]不懂[AIRBRAKE]空气闸[FUEL MIX]油针混控[GYRO]陀螺仪[MOTOR]马达(三)直升机功能[PIT CURVE]螺距曲线、悬停最高最低螺距微调[THR CURVE]油门曲线、油门微调[THR HOLD]油门锁定、舵机延迟[SWASH MIX]斜盘混控[THR MIX]油门混控[PIT to NEEDLE]螺距->油针混控[PIT to RUDD]螺距->尾舵混控[GYRO]陀螺仪[GOVERNOR]定速器计时器设置:在主界面上分别点击ST1、ST2进入,设定报警时间、计时归零、开关分配等键盘锁定:在主界面按住S1超过1秒,则锁定键盘;再次按住S1超过1秒,则取消锁定。
CGAD滚动型空调机器人说明书

CGADChiller com compressor scroll 20 A 150 trChiller Modelo CGAD com Condensação a Ar Vantagens para muitas aplicaçõesO chiller scroll modelo CGAD elimina aspreocupações sobre o desempenho da máquina em praticamente qualquer configuração.Com seu design altamente confiável mantém aeficiência de operação e a capacidade emaplicações de conforto, suportando tambémprocessos industriais sensíveis com precisão nocontrole da temperatura.Eficiência Energética e Sistema deConforto Integrado A automação de resfriadores Trane ordena apartida de forma inteligente, otimizando aeficiência energética dos equipamentos. Umsoftware sofisticado avalia e determina aalternativa de menor consumo de energia.Se o seu projeto pede uma interface paraoutros sistemas, o sistema Tracer Summit podecompartilhar dados.Através do protocolo aberto de sistemas da ASHRAE, o BACNet, o MODBUS e outros sobconsulta.Menor área de piso.n Baixo nível de ruído proporcionado pelatecnologia utilizada nas hélices dosventiladores.n Melhor eficiência (kW/TR).n Design moderno.Os modelos disponíveis são:Compressor ScrollT odos os modelos do CGAD sãoequipados com compressores Scroll, montados em circuitos de refrigera-ção independentes. Confira os benefícios dos compressores Scroll:- Apresentam eficiência de 5 a 10% maiores,que compressores recíprocos;- Não possuem válvulas, sendo extremamenteresistentes a golpes de líquido;CGAD 020CGAD 025CGAD 030CGAD 040CGAD 050CGAD 060CGAD 070CGAD 080CGAD 090CGAD 100CGAD 120CGAD 150- Possuem 64% menos partes móveis;- Operação extremamente suave e silenciosa,comparável a um compressor centrífugo;- Baixa variação de torque, o que propicia uma redução na vibração e ruído e um aumento da vida útil do motor.- Proteção elétrica montada internamente aocompressor protegendo-o contra: sobrecarga máxima operacional, alta e baixa tensão e perdas da carga de refrigerante.O dispositivo é sensível a corrente e aquecimento.Ocorrendo a falha abrem-se as três fases da alimentação.Tensão de Comando/Alimentação T odos os modelos dos Resfriadores de Líquido CGAD Trane são oferecidos com tensão de comando 220 V. Motores trifásicos (3 F) e com a frequência padrão de 60 Hz . As opções de tensão de alimentação são:n 220 V n 380 V n 440 V Evaporadores Os chillers CGAD, apresentam evaporadores do tipo “Shell & Tube”, projetados de acordo com as normas da ASME para vasos de pressão sem combustão300 psig.Condensadores Os modelos standard do CGAD sáo oferecidos com aletas em alumínio ou opcionalmente em alumínio com proteção yellow fin.Os condensadores de ar são equipados com hélices projetadas para melhorar a eficiência da troca de calor e proporcionar menor ruído.Chicanas de Plástico Espelhos em Aço Carbono Tubo em Cobre Ranhurado Internamente Fluxo de ÁguaFluxo de ArRefrigeranteOs modelos standard saemde fábrica com refrigerante R-407C.Conector Acoplável Os conectores acopláveisfacilitam a conexãode terminais e diminuem a interferência.Permitem conectar dispositivos como sensor detemperatura, sensor de nível de líquido,transdutor de pressão, válvula eletrônica deexpansão entreoutros.Controlador Microprocessado CH530As unidades são equipadas com o controladormicroprocessado CH530 com o módulo decontrole DynaView, que é um visor LCDsensível ao toque, o qual permite ao usuárioacessar qualquer informação relacionada a configuração, modo de operação,temperaturas, dados elétricos, pressões ediagnósticos.Controles de Segurança CH530O controlador oferece um alto nível deproteção ao seu Chiller, monitorandoconstantemente as variáveis de pressão, corrente, tensão e temperaturas do evaporadore condensador. Quando uma destas variáveisse aproxima de uma condição limite, a qualpoderia provocar o desligamento da unidade, ocontrolador inicia uma série de ações, tais como o escalonamento dos compressores eventiladores, para manter o equipamento emfuncionamento. O controlador irá sempreotimizar o funciona-mento da unidade, para tero melhor nível deeficiência energética.Controles Opcionais A Trane ainda oferece uma vasta gama de controles, destinados a aplicações específicas de cada instalação. Consulte seu Engenheiro de venda.Tracer Summit - Sistema de Conforto Integrado (ICS) Trane O Sistema de Gerenciamento Predial Tracer Summit com Controle de Resfriadores fornece as funções de automação predial egerenciamento de energia através de um controle independente.O Controle de Resfriadores é capaz de monitorar e controlar todo o sistema instalado de resfriadores.Aplicativos disponíveis:. Programador de horário;. Limitador de demanda;. Sequenciamento do resfriador;. Linguagem para controle do processo;. Processamento Boleano;. Controle do ambiente;. Relatórios e registros;. Mensagens personalizadas;. T empo de operação e manutenção;. Registro de tendências;. Laço de controle PID.T odo este controle pode ser feito a partir de um local remoto.O proprietário de um estabelecimento ou edifício pode monitorar completamente o resfriador a partir do sistema Tracer, pois todas as informações de monitoração e diagnósticos indicadas no controlador da unidade podem ser lidas a partir do visor do sistema Tracer.O sistema Tracer pode fornecer controle de sequenciamento para até 25 unidades no mesmo sistema.Para ter estas facilidade énecessário ter a interface decomunicação COMM 3 edispositivos de unidade de controle predial (BCU) esoftware de gerenciamentoTracer Summit.Trane – marca do grupo Trane Technologies (NYSE: TT), inovador em clima global - cria ambientes internos confortáveis eenergeticamente eficientes por meio de um amplo portfólio de sistemas, controles, serviços, parte e peças para ar condicionado,aquecimento e ventilação. Para mais informações, visite ou © 2020 Trane. Todos os Direitos Reservados.Todas as marcas comerciais mencionadas neste documento são marcas de seus respectivos proprietários.CG-SLB001G-PBData: 03/09/2020A automação do sistema Trane gera os relatórios definidos na Diretriz ASHRAE.Mantendo os Operadores InformadosUma parte crucial da operação eficiente deresfriadores é assegurar que o pessoaloperacional tenha informação instantâneasobre o que esta acontecendo nosequipamentos. Gráficos com desenhosesquemáticos dos resfriadores, tubulação,bombas e torres descrevem claramente osistema de resfriadores, habilitando osoperadores do edifício a facilmente monitorartodas as condições.Proteção contra a corrosão do produtoRecomenda-se que os equipamentos de ar condicionado não sejam instalados em ambientes com atmosfera corrosiva, como gases ácidos, alcalinos e ambientes com brisa do mar.Havendo a necessidade de instalação de equipamentos de ar condicionado nestes ambientes, a Trane do Brasil recomenda a aplicação de uma proteção extra contra corrosão, como proteção Fenólica ou aplicação de ADSIL.Para maiores informações, entre em contato com o seu distribuidor local.。
TFR8SB说明书

TFR8SB 说明书1 介绍1.1 兼容性1.1.1 兼容系统2.4G Futaba FASST系统(7通和Multi模式):6EX, 7C, TM-7, TM-8, T8FG, T10C, TM-10,T10CG, T12Z, T12FG, TM-14, T14MZ 等。
1.1.2 在SB端口兼容舵机Futaba S-BUS 舵机,FrSky D12MB舵机1.2 参数模式:TFR8SB(8通FASST兼容接收机带RSSI和SB端口)大小:44.5*27.5*17mm重量:11.5g工作电压范围:3.5-10V工作温度范围:-10℃-80℃舵机帧率:14ms(FS-正常模式)7ms(HS-高速模式)1.3 特征:1)兼容2.4G FASST 系统(7通模式/Multi模式)2)SB 端口兼容Futaba S.BUS舵机和FrSky D12MB舵机。
没有接收机通道限制(除控本身限制)和阻止不匹配舵机通道连接。
3)RSSI输出4)两种可选择的失控保护(控本身的或者TFR8SB侧端的)5)S.BUS 舵机/在TFR8SB上设置的S.BUS 兼容舵机通道6)提高灵敏度和稳定性7)工作温度范围变宽,适用于所有类型模型8)固件可升级2.安装2.1对码过程:打开控,按住接收机上F/S按钮同时接电源,红灯灭,绿灯亮,对码成功,接收机正常工作。
2.2设置失控保护:打开控,按住TFR8-SB接收机的F/S按键并接电源。
当接收机上的红灯灭,绿灯长亮时,说明对码成功。
TFR8-SB接收机有两个可选择的失控保护选项:一种是兼容控上本身的失控保护设置,第二种在接收机上设置失控保,如果没有关闭控上原有的失控保护,TFR8-SB将优先使用控上自带的失控保护。
2.2.1 在控上使用原有的失控保护设置:如果没有关闭原有控上的失控保护,TFR8-SB将使用控本身的失控保护。
2.2.2 在TFR8-SB上设置失控保护:TFR8-S 支持全通道失控保护功能,下面是TFR8-SB设置失控保护的步骤:1) TFR8-SB接收机对码成功后,进入控的设置菜单,关闭控上原来的失控保护设置;2)在TFR8-SB接收机的任意通道设置任意值的失控保护;3)从控上把舵杆设置到某一位置,然后按住TFR8-SB接收机的F/S按键,当接收机上的绿灯闪两下,这个位置就被存下来了,表明失控保护设置成功。
FUTABA10C航模遥控器简体中文使用说明
FUTABA 10C航模遥控器简体中文使用说明功能篇FUTABA对控上各开关和旋钮的定义是以ABCD这些字母来命名的,从左到右,从前到后的排列。
没有严格意义上的那个开关是管哪个功能。
在功能设定的操作上使用了4个按键(旋钮),菜单键(MODE)、退出键(END)、方向键(CURSOR)、调节及**旋钮(PUSH)。
菜单键(MODE):长按后可呼出操作菜单,在菜单状态下再次按此键可进行高级菜单。
退出键(END):退出当前的选择或者菜单方向键(CURSOR):在菜单和功能之间进行选择,可向上、下、左、右拔动调节及**旋钮(PUSH):通过旋转可快速修改选中的数值和选择,向下按压时起到**的作用。
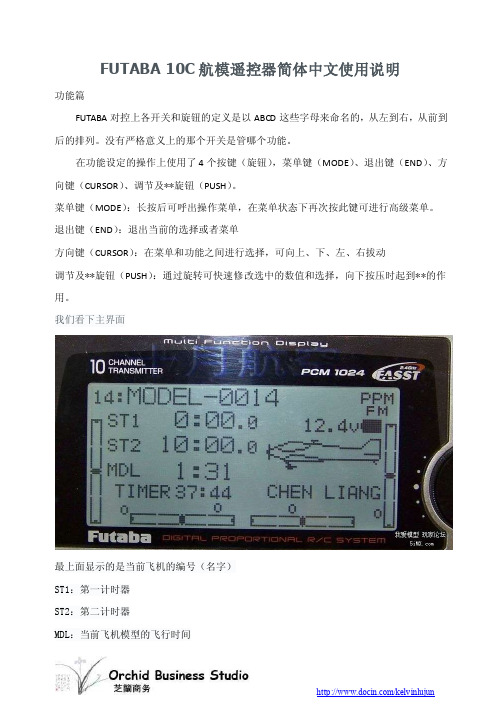
我们看下主界面最上面显示的是当前飞机的编号(名字)ST1:第一计时器ST2:第二计时器MDL:当前飞机模型的飞行时间TIMER:开机总时间以上各时间都可以在主界面通过“方向键”选择后长按“PUSH”键来进行归零清除!在主界面的右下角可设定使用者的名字如果不进行设定的话就是默认的FUTABA字样。
右主界面的右上角显示的是当前信号发射的制式“PPM”或者是“PCM”,下方还有电池的容量。
接下来将详细介绍每个功能的使用,先从固定翼开始介绍。
普通功能菜单介绍我们先**主菜单,开机后长按“MODE”会有如下界面:如下图使用“CURSOR”键进行选择并向下翻动可**普通菜单的第二页,如图:我们将普通菜单下的各功能分列并解释一下:MODEL:模型选择/数据复制/模型命名D/R,EXP:大小舵及EXP曲线END POINT:舵机行程SUB-TRIM:舵机微调(电子中立点设定)REVERSE:正反舵TRIM:微调设定及微调清除THROTTLE CUT:熄火开关设置IDEL-DOWN:油门低速混控F/S:失控保护(在PPM模式下没有此选项)AUX-CH:通道自定义PARAMETER:参数设置TIMER:计时器TRAINER:教练功能LOGIC SW:逻辑开关SERVO:通道状态显示/测试固定翼普通功能分解MODEL:模型选择/数据复制/模型命名此项有三个功能分别是:模型选择(10C在不插扩展卡的情况下可记忆15个模型数据)、模型间的数据复制、对记忆模型的命名模型选择见下图使用“CURSOR”键移动到模型数据的编号上,如上图“14”转动“PUSH”进行选择会出现下图要求长按“PUSH”的提示。
FUTABA遥控器FFS使用说明书(中文)

FUTABA遥控器FFS使⽤说明书(中⽂)Futaba FF8H Super 中⽂使⽤⼿冊規格特點簡介:雙搖桿板控型態8個動作頻道PCM 1024⽅式FM-PCM/PPM電波發射模式8部模型體記憶數插卡式擴增模型體記憶數直昇機/⾶機/滑翔機三機能選擇液晶螢幕顯⽰設定資料舵⾯微調數位化開關執⾏機能可變搖桿張⼒.⾧度可調教練連線機能DSC連線控制機能⾼周波發射模組可換售價20000元(視周邊配備有所差異)FF8H Super 系統發射機-T8UHPS各部構造名稱圖⾯中所標⽰的各執⾏開關機能,以原廠預設值為依據,部分執⾏開關可以變更設定開機時液晶螢幕畫⾯顯⽰機能說明控制⾯板上各操作按鍵機能說明基本⽬錄(BASIC MENU)內含機能圖⽰進階⽬錄(ADV ANCE MENU)內含機能說明TH-CRV 油⾨曲線(NORM) Throttle Curve油⾨曲線(NORM)機能說明:停懸⾶⾏時,油⾨曲線是⼀個有五個點所組成的曲線,藉由油⾨曲線的調整,可將油⾨搖桿對應引擎轉數調整到最好的⾶⾏狀態,油⾨曲線的調整,在實際⾶⾏時仍需搭配螺距曲線⼀起調整,使得停懸⾶⾏時,主懸設定⽅法:1.在打開電源後的初期畫⾯狀態下同時按鍵進⼊基本⽬錄(BASIC MENU).2.按或,選擇出所要調整的機能,直到(TH-CRV)出現.3.按或,選擇出所要調整的1-5點,當要增減該點的數值時可按+ - 鍵來進⾏.4.如要將數值回歸到初期預設值,先按或鍵選擇出要回歸初期預設值的點,再同時按+ - 鍵,即可使該點重回預設值.翼的轉數在油⾨搖桿上下移動時仍能保持⼀定的轉數值,油⾨曲線分有:NORM IDLE1 IDLE2三種型態,⽽NORM型態的油⾨曲線可在基本⽬錄(BASIC MENU)或進階⽬錄(ADV ANCE MENU)中設定,並且所調整後的結果,會同時在這上述兩個選單中顯⽰出來.油⾨曲線每個點的初期預設值如下:pos1=0% pos2=25% pos3=50% pos4=75% pos5=100% PI-CRV螺距曲線(NORM) PITCH CURVE螺距曲線(NORM)機能說明:停懸⾶⾏時,螺距曲線是⼀個有五個點所組成的曲線,藉由螺距曲線的調整,可將油⾨搖桿對應螺距曲線調整設定⽅法:1.在打開電源後的初期畫⾯狀態下同時按鍵進⼊基本⽬錄(BASIC MENU).2.按或,選擇所要調整的機能,直到(PI-CRV)出現.3.按或,選擇出所要調整的1-5點,當要增減該點的數值時可按+ - 鍵來進⾏.4.如要將數值回歸到初期預設值,先按或鍵選擇出要回歸初期預設值的點,再同時按+ - 鍵,即可使該點重回預設值.螺距曲線每個點的初期預設值如下:pos1=0% pos2=25% pos3=50% pos4=75% pos5=100%到最好的⾶⾏狀態,螺距曲線的調整,在實際⾶⾏時仍需搭配油⾨曲線⼀起調整,使得停懸⾶⾏時,主懸翼的轉數在油⾨搖桿上下移動時仍能保持⼀定的轉數值.REVOLU上下跟軸(NORM) REVOLUTION MIXING 上下跟軸(NORM)機能說明:由於主懸翼的螺距變化,引擎轉數的變化,以致有了反扭⼒的現象,使尾舵產⽣偏向問題,因此尾懸翼的螺距也在這時同時跟隨變化,藉以壓制主懸翼螺距變化,引擎轉數變化所產⽣的反扭⼒,使尾舵(Rudd)能保持固定的⽅向位置.上下跟軸共分為五個點,並唯⼀個可調整的曲線形態,主懸翼為右回轉(順時針)油⾨搖桿由低速向⾼速移動時,尾設定⽅法:1.在打開電源後的初期畫⾯狀態下同時按鍵進⼊基本⽬錄(BASIC MENU).2.按或,選擇所要調整的機能,直到(REVOLU)出現.3.按或,選擇出所要調整的1-5點,當要增減該點的數值時可按+ - 鍵來進⾏,上下舵受反扭⼒⽽呈現由左向右的旋轉動作,⽽當主懸翼為左回轉(逆時針)時,油⾨搖桿由低速向⾼速移動時,尾舵則呈由右向左旋轉的動作,尾舵左右旋轉動作⽅向的改變,可由經由改變數值的正負,⽽予以變更.主懸翼右回轉時-20% -10% 0% +10% +20%主懸翼左回轉時=20% =10% 0% -10% -20%跟軸機能初期式設定在ON(開啟)的狀況,要選擇ON或INH(禁⽌)可按+ - 鍵來選擇.4.如要將數值回歸到初期預設值,先按或鍵選擇出要回歸初期預設值的點,再同時按+ - 鍵,即可使該點重回預設值.上下跟軸每個點的初期預設值如下:pos1= -20% pos2=-10% pos3=0% pos4=+10% pos5=+20%ATV伺服機舵⾓最⼤⾏程量ADJUSTABLE TRAVEL VOLUME A T V伺服機舵⾓最⼤⾏程量機能說明:可調整各個動作伺服機的左右舵⾓最⼤⾏程量,伺服機的左右舵⾓最⼤⾏程量,為可各⾃單獨調整,⾏程量為100%設定值時,1- 4動作的伺服機舵⾓動作⾓度為左右各約40度,5- 8動作的伺服機,動作⾓度為左右各約55度.設定⽅法:1.在打開電源後的初期畫⾯狀態下同時按鍵進⼊基本⽬錄(BASIC MENU).2.按或,選擇所要調整的機能,直到(ATV)出現.3.按或,選擇出所要調整的動作,再以搖桿或開關的動作⽅向,來選擇其所對應的動作⽅向,當要增減該點的數值時可按+ - 鍵來進⾏.4.如要將數值回歸到初期預設值,先按或鍵選擇出要回歸初期預設值的動作,在意搖桿或開關的動作⽅向,來選擇要回歸到初期預設值得動作⽅向,再同時按+ - 鍵,即可使該動作⽅向重回初期預設值.伺服機舵⾓⾏程量設定範圍1-4動作=30%-140%5-8動作=30%-110%各個動作在螢幕上所顯⽰的簡稱代號動作(CH)動作名稱1AL=副翼2EL=昇降舵3TH=油⾨4RU=尾舵5GY=陀螺儀6PI=螺距77=第七動作88=第⼋動作D/R⼤⼩動作DUAL RATED/L⼤⼩動作機能說明:可經由開關的切換,來改變副翼,昇降舵,尾舵這三個動作的控制⽐率,各舵⾓的調整可左右或上下等⽅向分別設定,開關的選擇如是SW-E,那麼⼤⼩動作就可隨油⾨定速開關的切換⽽⾃動轉換.設定⽅法:1.在打開電源後的初期畫⾯狀態下同時按鍵進⼊基本⽬錄(BASIC MENU).2.按或,選擇所要調整的機能,直到(D/L)出現.3.按,選擇出所要調整的動作和上下⽅向,再以+ - 鍵來增減該動作⽅向的數值,設定出⼤或⼩動的開關位置.4.按鍵選擇出所要執⾏的⼤⼩動作機能,再以+ - 鍵選擇出該機能的執⾏開關位置.5.如要將數值回歸初期預設值,先按或鍵選擇出要回歸初期預設值得動作和⽅向,再同時按+ - 鍵即可使該動作和⽅向重回初期預設值.各個動作在螢幕上所顯⽰的簡稱代號動作動作名稱(CH)1AL=副翼2EL=昇降舵4RU=尾舵各個控制開關在螢幕上所顯⽰的簡稱代號開關名稱SW-A=開關ASW-B=開關BSW-C=開關CSW-D=開關DSW-E=開關ESTK1=副翼搖桿STK2=昇降舵搖桿STK3=油⾨搖桿STK4=尾舵搖桿基本⽬錄(BASIC MENU)內含機能圖⽰進階⽬錄(ADV ANCE MENU)內含機能圖⽰EXP 中⽴點附近動作反應EXPONETIALEXP中⽴點附近動作反應機能說明:改變副翼,昇降舵,尾舵這三個動作的控制搖桿在中⽴點附近的反應動作,使之遲鈍或敏感,設定值如為負(-)值,則中⽴點附近的舵⾓動作反應會變的⽐較遲鈍.反之,當設定值為正(+)值,則中⽴點附近的舵⾓動作反應會變的⽐較敏感.如在⼤⼩動作D/L選擇⾃動切換(SW-E)則中⽴點附近的舵⾓動作反應(EXP)會⾃動跟隨開關(SW-E)的切換⽽改變.設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU). 2.按或鍵,選擇出所要調整的機能,直到(EXP)出現.3.按鍵,選擇初所要調整的動作及開關⽅向,當要增減該動作的數值時,可按+ -鍵來進⾏.4.如要將數值回歸到初期預設值,先按或鍵選擇出要回歸初期預設值得動作及⽅向,再同時按+ - 鍵,即可使該動作⽅向重回初期預設值各個動作在螢幕上所顯⽰的簡稱代號動作(CH)動作名稱1AL=副翼2EL=昇降舵3TH=油⾨4RU=尾舵F/S 失控保護設定FAIL SAFE(僅在PCM模式下才有的功能)失控保護設定機能說明:當電波接收遭到其他電波⼲擾,⽽無法正常控制時,各個伺服機會⾃動保持再受⼲擾前的最後位置,(當選擇NORM模式時).如果要將伺服機鎖定,在特定的位置上,那就要選擇F/S模式.⾶⾏時以⼈⾝安全為最重要前題,強烈建議使⽤本功能,尤其是⾶直昇機或⾶機場合,⼀定要選擇F/S模式,並將油⾨的鎖定動作設在設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(F/S)出現.3.按或鍵,選擇出所要設動的動作頻道,再以+各個動作在螢幕上所顯⽰的簡稱代號動作(CH)動作名稱1 AIL=副翼2ELE=昇降舵3THR=油⾨4RUD=尾舵5GYR=陀螺儀低速位置.各頻道動作可個別設定,初期設定值是在NORM模式. 要設伺服機鎖定位置時,可⽤搖桿或旋鈕讓欲設定的頻道做出鎖定時的動作位置.所定的位置發射機每⼀分鐘會⾃動傳送給接收機.使⽤PCM接收機的場合,當接收機的供應電池的電壓降到約3.8V以下時,油⾨伺服機會⾃動進⼊鎖定狀態,(初期設定值是低速),⽽其他伺服機仍可正常運作,直到機體降落.解除鎖定的⽅法:當接收機的供應電池的電壓降低⽽發⽣鎖定時,只要將油⾨搖桿⼀到最低速位置就可短暫解除鎖定現象,但30秒後鎖定狀態會再次⾃動執⾏. 鍵選擇⼀般模式(NORM),或以-鍵選擇鎖定模式(F/S).4.⽤搖桿或旋轉鈕讓欲設定的頻道,做出鎖定時的動作位置,再同時按+ - 鍵,完成鎖定位置記憶.確認⽅法:打開發射機,接收機電源⼀分鐘以上,再將法設機電源關掉,然後觀察已設定的伺服機是否進⼊鎖定位置,如進⼊鎖定位置,則表⽰設定⼯作正確.6PIT=螺距7CH7=第七動8CH8=第⼋動REVERS伺服機正逆轉SERVOREVERSE伺服機正逆轉機能說明:可以使各個頻道的伺服機動作⽅向改變為正轉或逆轉.設定⽅法: 1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).各個動作在螢幕上所顯⽰的簡稱代號動作(CH)動作名稱1AIL=副翼按或鍵,選擇出所要調整的機能,直到(REVERS)出現.3.按或鍵,選擇出所要設動的動作頻道,再以+ 鍵選擇正轉(NORM),或以- 鍵選擇逆轉(REV).2ELE=昇降舵3THR=油⾨4RUD=尾舵5GYR=陀螺儀6PIT=螺距7CH7=第七動8CH8=第⼋動DATA RESET 初期值重設初期值重設機能說明:要將現在使⽤中的模型體所有設定數據回歸到初期預設,以便於做全⾯化的重新設定⼯作.設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(PARA)出現.3.按或鍵直到(DATA RSET)出現.4.同時按+ - 鍵兩次,即完成初期直重設⼯作ATL油⾨微調點設定ATL TRIM油⾨微調點設定機能油⾨搖桿在低速位置時,使⽤微調修正,⽽不會影響到油⾨搖桿再⾼速時所設定的動作位置,可防⽌因為油⾨微調的操作⽽造成油⾨搖桿在⾼速位置時,控制連桿在⾼速側的位置改變(動作過量).設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(PARA)出現.3.按或鍵直到(ATL)出現.4.按+ 鍵來選擇開啟ATL機能,或按- 鍵來選擇關閉ATL機能EG/S引擎啟動ENGINE STARTER引擎啟動機能說明:當機體所使⽤的引擎加設有啟動系統時,可⽤本機能透過開關H(SW-H)來執⾏控制啟動器的啟動動作.設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(PARA)出現.3.按或鍵直到(EG/S)出現.4.按+或- 鍵,來選擇關閉EG/S機能,或是執⾏控制的動作頻道.TYPE⼗字盤模式選擇MODETYPE⼗字盤模式選擇機能說明:在直昇機的場合下,本機能可⽤來對多種不同型態的⼗字盤控制模式,可選擇的⼗字盤控制模式有五種,⽽本機能的另⼀個意義是可以選擇出對應不同的⾶⾏場合,例如ACRO(⾶機) GLID 1FLP(滑翔機,單伺服機控制襟翼) GLID 2FLP(滑翔機,雙伺服機控制襟翼).設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(PARA)出現.3.按或鍵直到(TYPE)出現.4.按+或- 鍵,來選擇出⽬前機體所使⽤的⼗字盤模式.5.同時按+ - 鍵兩次,即完成⼗字盤模式選定⼯作.MOD發射模式選擇MODULATION發射模式選擇機能說明:所使⽤的接收器形式不同時,發射機的發射模式也須⼀併調整,使兩者⼀致.也就是當使⽤PCM接收機時,就必須在發射機這⽅的發射模式設定為PCM 模式,反之,如使⽤FM接收機,發射模式就必須設定為PPM模式.設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(PARA)出現.3.按或鍵直到(MOD)出現.4.按+ 鍵,來選擇成為PCM模式,或按- 來選擇成為PPM模式.發射模式變更之後,必須將發射機電源關閉,然後再次開啟電源,如此所變更的發射模式才會被記憶起來.SWASH⼗字盤模式最⼤舵⾓調整SWASH AFR⼗字盤模式最⼤舵⾓調整機能說明:當⼗字盤模式選擇在SWH2,SWH4, SR-3或SN-3時,此性機能才會被顯⽰出來,本機能主要是針對副翼,昇降舵,螺距這三個部分的舵⾓做調整.當⼗字盤模式選擇在SWH1的設定⽅法:1.打開電源後的初期畫⾯狀態下,同時按與鍵進⼊基本⽬錄(BASIC MENU).2.按或鍵,選擇出所要調整的機能,直到(SWASH)出現.3.按鍵選擇出所要調整的動作頻道,當要增減該動作的數值,可按+ 或- 來場合,此機能將不會被顯⽰出來.進⾏.4.如要將數值回歸到初期預設值,先按或選擇出要回歸初期預設值得動作頻道,再同時按+ -鍵,即可使該動作重回初期預設值.基本⽬錄(BASIC MENU)內含機能圖⽰A.參數值副⽬錄B.模型值副⽬錄C.微調值副⽬錄D.同時按鍵可進⼊基本⽬錄E.同時按鍵可回到初期開機⽬錄F.按鍵顯⽰出碼錶記時畫⾯1.停懸油⾨曲線(基本⽬錄初期畫⾯)2.停懸螺距曲線3.停懸時上下跟軸4.伺服機舵⾓⾏程5.⼤⼩動作6.中⽴點附近動作反應7.失控安全鎖(限PCM模式中使⽤)8.伺服機正逆轉9.參數值10.設定資料重回預設值11.油⾨微調點設定12.引擎啟動13.⼗字盤模式14.PCM/PPM發射模式15.⼗字盤模式舵⾓調整量(模式1中不顯⽰)16.倒⾶開關17.微調值18.微調量重回預設值19.副翼微調量20.昇降舵微調量21.油⾨微調量22.尾舵微調量23.微調顯⽰⽅式24.伺服機中⽴點微調25.教練開關26引擎熄⽕27.模型值28.模型體選擇29.資料拷⾙30.模型命名31碼錶計時。
FUTABA 10C简体中文使用说明
FUTABA 10C简体中文使用说明外观篇很多人说10C的外型设计是FUTABA的倒退,没有前几代控的经典。
说实话我一开始看见10C也感觉很丑,可能是我们这些人已有了大9,FF9先入为主的观念了吧。
后来具我了解一些新手对FUTABA 10C的看法正好相反,他们认为设计的很时尚很新潮。
可能是我们太保守了吧。
功能篇FUTABA对控上各开关和旋钮的定义是以ABCD这些字母来命名的,从左到右,从前到后的排列。
没有严格意义上的那个开关是管哪个功能。
在功能设定的操作上使用了4个按键(旋钮),菜单键(MODE)、退出键(END)、方向键(CURSOR)、调节及**旋钮(PUSH)。
菜单键(MODE):长按后可呼出操作菜单,在菜单状态下再次按此键可进行高级菜单。
退出键(END):退出当前的选择或者菜单方向键(CURSOR):在菜单和功能之间进行选择,可向上、下、左、右拔动调节及**旋钮(PUSH):通过旋转可快速修改选中的数值和选择,向下按压时起到**的作用。
我们看下主界面最上面显示的是当前飞机的编号(名字)ST1:第一计时器ST2:第二计时器MDL:当前飞机模型的飞行时间TIMER:开机总时间以上各时间都可以在主界面通过“方向键”选择后长按“PUSH”键来进行归零清除!在主界面的右下角可设定使用者的名字如果不进行设定的话就是默认的FUTABA字样。
右主界面的右上角显示的是当前信号发射的制式“PPM”或者是“PCM”,下方还有电池的容量。
接下来将详细介绍每个功能的使用,先从固定翼开始介绍。
普通功能菜单介绍我们先**主菜单,开机后长按“MODE”会有如下界面:如下图使用“CURSOR”键进行选择并向下翻动可**普通菜单的第二页,如图:我们将普通菜单下的各功能分列并解释一下:MODEL:模型选择/数据复制/模型命名D/R,EXP:大小舵及EXP曲线END POINT:舵机行程SUB-TRIM:舵机微调(电子中立点设定)REVERSE:正反舵TRIM:微调设定及微调清除THROTTLE CUT:熄火开关设置IDEL-DOWN:油门低速混控F/S:失控保护(在PPM模式下没有此选项)AUX-CH:通道自定义PARAMETER:参数设置TIMER:计时器TRAINER:教练功能LOGIC SW:逻辑开关SERVO:通道状态显示/测试固定翼普通功能分解MODEL:模型选择/数据复制/模型命名此项有三个功能分别是:模型选择(10C在不插扩展卡的情况下可记忆15个模型数据)、模型间的数据复制、对记忆模型的命名模型选择见下图使用“CURSOR”键移动到模型数据的编号上,如上图“14”转动“PUSH”进行选择会出现下图要求长按“PUSH”的提示。
孚恩M10安卓手持终端操作手册
M10 手持终端用户手册V1.0上海孚恩电子科技有限公司版权所有ShangHaiFineElectronics Co.,Ltd.AllRightReserved目录1.内容简介 (3)2.产品简介 (3)2.1.产品说明 (3)2.2.产品外观 (4)2.3.产品功能 (6)2.4.规格参数 (6)2.5.产品编号说明 (8)2.6.产品配置说明 (8)2.7.交付清单 (9)3.操作指南 (10)3.1.使用须知 (10)3.1.1.电池安装 (10)3.1.2.卡片安装 (13)3.1.3.充电 (15)3.1.4.按键布局图及说明 (16)3.1.5.开机 (17)3.1.6.关机 (17)3.1.7.挂起 (17)3.1.8.挂起唤醒 (17)3.2.电脑同步 (17)3.3.时间设置 (19)4.注意事项 (21)4.1.危险 (21)4.2.警告 (22)5.FAQs (22)1.内容简介M10手持终端是本公司推出的新一代产品,它采用高性能CPU和大容量的存储介质,可配置低中高频段无线射频模块,通过有线或无线进行数据通讯交互,使用Android操作系统,可满足各行业移动数据采集和简单数据处理的需求。
为了方便您的使用,本手册将详细地向您介绍M10手持终端和使用指南。
请在使用前认真阅读有关章节。
如果需要二次开发,可查阅SDK 文档和开发手册。
2.产品简介2.1.产品说明M10手持终端是本公司推出的新一代物联网多功能手持终端,它采用A9系列的CPU作为手持终端的控制中心,集成LCD显示屏、可充电电源管理、英文键盘输入、中文手写输入等功能,并将硬件驱动封装成API接口,二次开发接口和文档齐全,因而能很好地支持手持终端的应用程序,能很好地支持二次开发和远程升级,大大提高设备的便利性和应用扩展性。
本手持终端根据您选购的配置不同,设备可内置125Khz、13.56MHz、902~927Mhz、2.4GHz等无线射频识别模块,同时支持一维条码、二维条码、GPS定位等数据采集方式,能方便地自动采集各种数据;同时内置WIFI、蓝牙、GPRS、CDMA等无线传输模块,可方便地与车载终端、中央服务器进行即时数据传输与交换,具有高度可靠性和灵活便利性。
FUTER彩色摄像机中文说明书

移动光标到Pedestal 位置, 按一下Set键。Pedestal噪声调整菜单会在屏幕上显示。移动“I”,可调整Pedestal(信噪)的大小。
5-4、Chroma 图像色彩浓度:
移动光标到Chroma位置,按一下Set键。Chroma色彩浓度调整菜单会在屏
彩色摄像机说明书
(FK-208H,FK-388)
注意:为了防止火灾或触电、不要把摄像机暴露在雨中或置于潮湿环境中。
本设备经测试并建立了符合FCC标准的第15部分B类数字设备的规定。这些规定用来提供合理的保护。如果不按说明书安装和使用,可能会对无线电通讯造成干扰。然而,很难保证在安装时没有干扰产生。如果此设备在开和关时,对收音机或电视机的接收有干扰:
5-7、 WB-Menu(手动白平衡):
本菜单,用户可以手动调整白平衡,可独立调整R(红色)和B(蓝色)的浓度。
5-8、WB-Push(自动跟踪锁定白平衡):
移动光标到WB-Push位置,按住Set键,开启自动跟踪锁定白平衡。当自
动跟踪锁定完毕,松开Set键,便可以将白平衡锁定。
5-9、AGC(自动增益):
·应用各类型监控环境。
·卓越的信噪比.
·色彩还原逼真,自动跟踪白平衡(ATW)可跟踪宽范围的色温变化。
·在低光环境中降低色浓度、减少噪点达到夜视效果。
·自动电子快门,大于1.600:1,适用手动光圈镜头,自动光圈镜头。
·下列功能已内置于摄像机:
1)菜单(OSD)数字控制。
2)内同步和线路同步。
3)自动光圈(AI)自动电子快门。
4脚连接在摄像机后板上, 参照图中说明正确连接。
Pin 1
Damp +
Futaba S3010 电控系列说明书
感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
我们强烈建议您在使用设备前仔细阅读本说明书,并严格遵守规定的操作程序。
我们不承担因使用本产品而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任;同时,我们不承担因擅自对产品进行修改所引起的任何责任。
我们有权在不经通知的情况下变更产品设计、外观、性能及使用要求。
· 电调与相关连接部件连接前,请确保所有电线和连接部件绝缘良好,短路会毁坏电调。
· 请务必仔细连接好各部件,若连接不良,您可能不能正常控制赛车,或出现设备损坏等其他不可预知的情况。
· 使用此电调前,请认真查看各动力设备以及车架说明书,确保动力搭配合理,避免因错误的动力搭配导致电机超载,最终损坏电调。
· 内置多种常用模式(如:零进角Zero Timing闪灯模式、一般练习模式、STOCK 竞赛模式),适合所有竞赛,即选即用。
电调的设定参数可以导入导出,便于车手相互交流和借鉴彼此的设定。
· 体积非常之小(31.6x25.8x16.2mm),车架布局更方便;重量非常之轻(不含线重量仅为23.5g),低重量为车架的平衡提供更多的可调空间。
· 内置BEC升压电路,BEC最大输出电流高达6A,且支持 6V和7.4V 切换,轻松驱动各种强力舵机及高压舵机。
03产品特色02注意事项05连接电子调速器06设置电子调速器设定油门行程1XERUN XR10 STOCK SPEC 1S车用无刷电子调速器使用说明书01声明1. 连接马达:连接有感无刷马达与无感无刷马达的方式有差异,请务必遵照如下接线方式: · 连接有感无刷马达时:电调与马达相连有严格的线序要求,电调的#A/#B/#C必须与电机的#A/#B/#C三线严格一一对应,用6针感应线把电调与电机的感应口对接。
若有感无刷马达未接上感应线,则电调会工作 在无感模式,相当于电调连接无感无刷电机。
FUTABA舵机编号解释

FUTABA舵机编号解释
1995年後Futaba的Servo都是四位數字的組合
第一碼為Servo 內馬達的種類 (級數為 9>7>5>3)
3---三極馬達
5---五極馬達
7---七極馬達
9---無核芯馬達
第二碼為Servo設計的用途(號碼無關級數)
0---泛用型
1---飛機用
2---直昇機用
3---引擎動力扭力型
4---引擎動力速度型
5---滑翔機用
6---電動動力用
7---收輪腳
8---船用
9---保留泛用型
後兩碼就是每顆家族的族碼
01~49---類比式
50~69---數位式
例如:
S3001 就是Futaba 三極馬達泛用型.
S9204 是無核芯馬達Hei用
S9450 是無核芯馬達, 引擎動力用速度型, 數位式Servo
新的超小型 S3108 是三極馬達飛機用, 是3101的後續家族產品.。
FUTABA10C简体中文使用说明

FUTABA10C简体中文使用说明I.基本操作1.电源开关:将电源开关拨动到ON位置以打开遥控器电源。
2.模式选择:使用模式选择开关切换不同的模式:-MODE1:油门在右侧,副翼在左侧-MODE2:油门在左侧,副翼在右侧3.油门杆和副翼杆:油门杆用于控制电机的转速,副翼杆用于控制飞机(或其他航模)的方向。
II.功能和设置1.模型存储:FUTABA10C可以存储多个模型的设置,以便快速切换不同的模型配置。
-创建新模型:按下[MODEL]按钮,在显示屏上选择[NEWMODEL]创建新的模型。
-保存和加载模型:按下[MODEL]按钮,在显示屏上选择[SAVEMODEL]保存当前模型配置,或选择[LOADMODEL]加载之前保存的模型配置。
2.通道设置:FUTABA10C具有多个可调的通道。
通过以下步骤设置通道:- 按下[SYS]按钮,在显示屏上选择[System Setup]。
- 在[System Setup]菜单中选择[Function]。
- 在[Function]菜单中选择[Channel Assign],然后按照提示设置每个通道的功能。
3.曲线和混合设置:FUTABA10C支持曲线和混合功能,可以对各种通道进行更精确的调整。
- 按下[SYS]按钮,在显示屏上选择[System Setup]。
- 在[System Setup]菜单中选择[Function]。
- 在[Function]菜单中选择[Curve]或[Mixing],然后按照提示设置曲线或混合功能。
4.动力设置:FUTABA10C可以调整电机的动力输出。
通过以下步骤进行设置:- 按下[SYS]按钮,在显示屏上选择[System Setup]。
- 在[System Setup]菜单中选择[Function]。
- 在[Function]菜单中选择[Throttle Cut]或[Idle Down],然后按照提示设置动力输出。
5.飞行器类型设置:FUTABA10C可以设置不同类型的飞行器,以适应不同的控制需求。
futeba T8fg 遥控器说明书简要注释
模式调整方法:LINKAGE MENU—FREQUENCY—FASST (7CH/MULT)美国手/日本手改法 (STICK MODE):SYSTEM MENU—H/W SET—STICK MODER6008HS,Normal mode/High Speed mode模式辨别与切换:(1)辨别:不开控,开接收机指示灯红亮为普通模式,红绿都亮为高速模式。
(2)模式切换:不开控,按住按钮开接收机超过1秒,。
(3)对频:开控,开接收机,按住按钮超过2秒,等绿灯亮。
1副翼 Aileron2升降 Elevator3油门 Throttle4尾舵 Rudder5感度 Gyro6螺距 Pitch7定速 Governor8油针 Elevator2系统菜单:[TRAINER]教练:[DISPLAY]显示:对比度、背光[USER NAME]用户名:设置用户名称[H/W SET]H/W设置:摇杆开关反向、改手stick mode[INFO]产品信息:改语言油門螺距曲線改為5點(ff10有7點,5點自由移動)開關都改為3段延續fg的特色,每個開關都可以自由定義,以及組合邏輯開關陀螺儀感度或定速器感度這類的,都可以用個別的開關設定,例如你有5段感度,你可以分別在5個開關做設定(舉例)頻道功能可以自由調動、定義更重要的是~他有12FG以上才有的十字盤校正功能耶!!连杆菜单:[SERVO]舵机状态显示[MODEL SEL]模型选择、命名[MODEL TYPE]模型类型、斜盘类型[FREQUENCY]发射模式(7通/10通)、地区选择(法国/其他)[FUNCTION]开关分配[SUB-TRIM]辅助微调[REVERSE]反向[FAIL SAFE]失控保护[END POINT]行程调整EPA[THR CUT]发动机熄火[IDLE DOWN]降低怠速速度[SWASH RING]斜盘调圆[SWASH]斜盘设置、总距周期距行程、斜盘动作精确调整[T1-T4 SET]电子微调设置[DATA RESET]数据重置模型菜单:(一)常用用功能[SERVO]舵机状态显示[CONDITION]飞行模式开关分配、飞行模式切换延迟等[DUAL RATE]双重比率[PROG. MIX]混控程序[PITH CURVE]螺距曲线[THR CURVE]油门曲线[THR HOLD]油门锁定[SWASH MIX]斜盘混控[THR MIX]油门混控[PIT-->RUD]尾舵混控[FUEL MIX]油针混控[GYRO]陀螺仪[GOVERNOR]定速器(二)固定翼用功能(不玩固定翼,不太懂这个):THR DELAY]油门延迟[AIL DIFF.]不懂[FLAP SET.]不懂[AIL CMBFLP]不懂[AIL RUD]副翼――>尾舵[CAMBER MIX]不懂[ELE CAMBER]不懂[CMBFLP ELE]不懂[RUD AIL]尾舵――>副翼[RUD ELE]尾舵――>升降[SNAP ROLL]不懂[AIRBRAKE]空气闸[FUEL MIX]油针混控[GYRO]陀螺仪[MOTOR]马达(三)直升机功能[PIT CURVE]螺距曲线、悬停最高最低螺距微调[THR CURVE]油门曲线、油门微调[THR HOLD]油门锁定、舵机延迟[SWASH MIX]斜盘混控[THR MIX]油门混控[PIT to NEEDLE]螺距->油针混控[PIT to RUDD]螺距->尾舵混控[GYRO]陀螺仪[GOVERNOR]定速器计时器设置:在主界面上分别点击ST1、ST2进入,设定报警时间、计时归零、开关分配等键盘锁定:在主界面按住S1超过1秒,则锁定键盘;再次按住S1超过1秒,则取消锁定。
futaba舵机详细资料
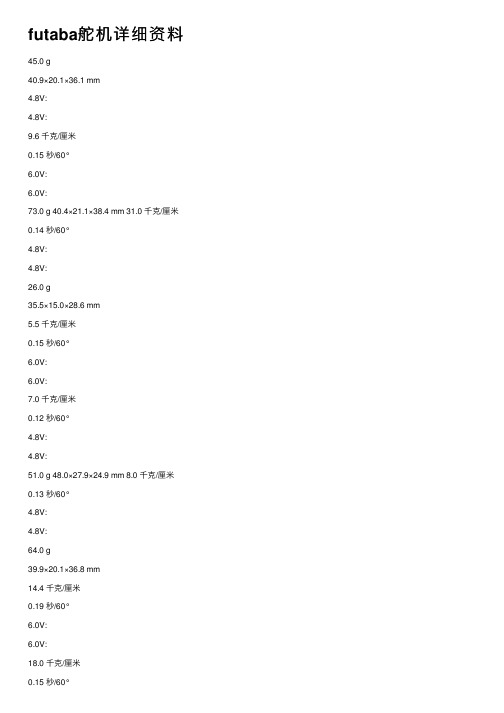
futaba舵机详细资料45.0 g40.9×20.1×36.1 mm4.8V:4.8V:9.6 千克/厘⽶0.15 秒/60°6.0V:6.0V:73.0 g 40.4×21.1×38.4 mm 31.0 千克/厘⽶0.14 秒/60°4.8V:4.8V:26.0 g35.5×15.0×28.6 mm5.5 千克/厘⽶0.15 秒/60°6.0V:6.0V:7.0 千克/厘⽶0.12 秒/60°4.8V:4.8V:51.0 g 48.0×27.9×24.9 mm 8.0 千克/厘⽶0.13 秒/60°4.8V:4.8V:64.0 g39.9×20.1×36.8 mm14.4 千克/厘⽶0.19 秒/60°6.0V:6.0V:4.8V:4.8V:59.5 g 39.9×20.1×36.8 mm 3.8 千克/厘⽶0.06 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm10.0 千克/厘⽶0.16 秒/60°6.0V:6.0V:12.6 千克/厘⽶0.13 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm8.4 千克/厘⽶0.13 秒/60°6.0V:6.0V:10.6 千克/厘⽶0.10 秒/60°4.8V:4.8V:51.0 g 39.9×20.1×36.8 mm 3.8 千克/厘⽶0.06 秒/60°4.8V:4.8V:26.0 g 36.1×15.0×27.9 mm 2.6 千克/厘⽶0.07 秒/60°4.8V:39.9×20.1×37.1 mm 12.5 千克/厘⽶0.16 秒/60°6.0V:6.0V:15.6 千克/厘⽶0.13 秒/60°4.8V:4.8V:63.0 g39.9×20.1×37.1 mm 14.4 千克/厘⽶0.19 秒/60°6.0V:6.0V:18.0 千克/厘⽶0.15 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm 8.5 千克/厘⽶0.13 秒/60°6.0V:6.0V:10.6 千克/厘⽶0.10 秒/60°4.8V:4.8V:58.0 g39.9×20.1×37.1 mm 11.2 千克/厘⽶0.18 秒/60°14.0 千克/厘⽶0.14 秒/60°4.8V:4.8V:44.0 g40.9×20.1×24.9 mm7.3 千克/厘⽶0.13 秒/60°6.0V:6.0V:9.2 千克/厘⽶0.10 秒/60°4.8V:4.8V:26.0 g36.1×15.0×27.9 mm5.5 千克/厘⽶0.15 秒/60°6.0V:6.0V:7.0 千克/厘⽶0.12 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V: 7.4V:7.1 千克/厘⽶0.11 秒/60°28.0 g 35.8×19.6×24.9 mm 7.4V: 7.4V:7.1 千克/厘⽶0.11 秒/60°21.0 g 36.8×19.6×24.9 mm 7.4V: 7.4V:5.0 千克/厘⽶36.8×19.6×24.9 mm7.4V:7.4V:5.0 千克/厘⽶0.16 秒/60°Futaba BLS151数字⽆刷双轴承⾦属Futaba BLS152数字⽆刷双轴承Futaba BLS153数字⽆刷Futaba BLS154数字⽆刷双轴承⾦属Futaba BLS155数字⽆刷双轴承⾦属Futaba BLS251数字⽆刷双轴承⾦属Futaba BLS252数字⽆刷双轴承⾦属Futaba BLS253数字⽆刷双轴承Futaba BLS254数字⽆刷Futaba BLS257数字⽆刷双轴承⾦属Futaba BLS351数字⽆刷双轴承混合⽆刷双轴承⾦属Futaba BLS451数字⽆刷⾦属Futaba BLS452数字⽆刷双轴承⾦属Futaba BLS551数字⽆刷Futaba BLS651数字⽆刷双轴承⾦属Futaba RS301CR-F1数字空⼼杯⾦属Futaba RS301CR-F2数字⾦属Futaba RS302CD-F1数字⾦属Futaba RS302CD-F2数字63.0 g39.9×20.1×37.6 mm 6.0V: 6.0V:14.1 千克/厘⽶0.13 秒/60°47.5 g39.9×20.1×39.1 mm 6.0V: 6.0V:8.9 千克/厘⽶0.20 秒/60°6.2 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.6 千克/厘⽶0.10 秒/60°65.2 g39.6×22.4×42.9 mm 4.8V: 6.0V:9.3 千克/厘⽶0.62 秒/60°4.8V: 4.8V:42.0 g46.0×23.1×24.9 mm 4.3 千克/厘⽶0.60 秒/60°6.0V: 6.0V:5.5 千克/厘⽶0.50 秒/60°4.8V: 4.8V:44.4 g39.9×20.1×36.1 mm 2.4 千克/厘⽶0.28 秒/60°6.0V: 6.0V:3.0 千克/厘⽶0.22 秒/60°4.8V: 4.8V:45.0 g39.9×20.1×36.1 mm 2.4 千克/厘⽶0.28 秒/60°4.8V: 4.8V:35.0 g31.0×16.0×30.0 mm 2.7 千克/厘⽶0.25 秒/60°6.0V: 6.0V:3.3 千克/厘⽶0.20 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘⽶0.23 秒/60°6.0V: 6.0V:4.1 千克/厘⽶0.19 秒/60°4.8V: 4.8V:37.0 g39.9×20.1×36.1 mm 3.2 千克/厘⽶0.23 秒/60°6.0V: 6.0V:4.1 千克/厘⽶0.19 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.2 千克/厘⽶0.20 秒/60°6.0V: 6.0V:6.5 千克/厘⽶0.16 秒/60°41.1 g39.9×20.1×38.1 mm 6.0V: 6.0V:6.5 千克/厘⽶0.16 秒/60°4.8V: 4.8V:49.0 g39.9×20.1×38.1 mm 5.2 千克/厘⽶0.20 秒/60°6.0V: 6.0V:6.5 千克/厘⽶0.16 秒/60°Futaba S30514.8V: 4.8V:17.0 g26.7×12.7×28.4 mm 2.5 千克/厘⽶0.18 秒/60°6.0V: 6.0V:3.1 千克/厘⽶0.14 秒/60°4.8V: 4.8V:21.0 g27.9×13.0×30.0 mm 3.7 千克/厘⽶0.25 秒/60°6.0V: 6.0V:4.6 千克/厘⽶0.20 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×19.8 mm 1.3 千克/厘⽶0.11 秒/60°6.0V: 6.0V:95.0 g58.9×29.0×50.0 mm9.2 千克/厘⽶0.21 秒/60°双轴承⾦属Futaba RS403PR数字空⼼杯⾦属Futaba RS404PD数字3-poleFutaba S110M模拟单轴承塑料Futaba S125模拟双轴承塑料Futaba S136G模拟3-pole衬套塑料Futaba S148模拟3-pole单轴承塑料Futaba S3001模拟3-pole双轴承⾦属Futaba S3002模拟3-pole塑料Futaba S3003模拟双轴承塑料Futaba S3004模拟3-pole单轴承塑料Futaba S3010模拟3-poleFutaba S3014⾦属Futaba S3050数字Futaba S31015-pole衬套混合Futaba S3102模拟3-pole⾦属Futaba S31033-pole衬套塑料Futaba S3104模拟3-pole9.6 g21.6×10.9×19.8 mm 1.3 千克/厘⽶0.11 秒/60°6.0V: 6.0V:1.5 千克/厘⽶0.09 秒/60°9.0 g22.1×10.9×20.1 mm 4.8V: 4.8V:1.2 千克/厘⽶0.12 秒/60°7.7 g20.6×11.4×22.1 mm 4.8V: 4.8V:1.2 千克/厘⽶0.12 秒/60°7.3 g22.9×10.2×20.3 mm 4.8V: 4.8V:1.2 千克/厘⽶0.12 秒/60°4.8V:0.14 秒/60°6.5 g22.9×10.2×20.3 mm 4.8V: 4.8V:0.5 千克/厘⽶0.14 秒/60°7.3 g21.8×10.9×19.8 mm 4.8V: 4.8V:1.6 千克/厘⽶0.10 秒/60°6.3 g22.1×10.9×20.1 mm 4.8V: 4.8V:0.6 千克/厘⽶0.12 秒/60°4.8V: 4.8V:9.6 g21.8×10.9×20.3 mm 1.2 千克/厘⽶0.11 秒/60°6.0V: 6.0V:1.5 千克/厘⽶0.10 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°4.8V: 4.8V:7.8 g22.1×10.9×20.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°17.0 g27.9×13.0×30.0 mm 4.8V: 4.8V:2.8 千克/厘⽶0.15 秒/60°4.8V: 4.8V:8.5 g22.1×10.9×23.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°23.0 g30.0×10.9×29.0 mm 4.8V: 4.8V:3.7 千克/厘⽶0.24 秒/60°4.8V: 4.8V:42.0 g40.9×20.1×36.1 mm 3.1 千克/厘⽶0.21 秒/60°6.0V: 6.0V:3.9 千克/厘⽶0.17 秒/60°4.8V: 4.8V:41.0 g39.9×20.1×38.1 mm 5.0 千克/厘⽶0.22 秒/60°6.0V: 6.0V:6.3 千克/厘⽶0.18 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘⽶0.11 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°4.8V: 4.8V:9.6 g22.1×10.9×20.1 mm 1.4 千克/厘⽶0.13 秒/60°6.0V: 6.0V:7.9 g22.1×10.9×20.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°塑料Futaba S31063-pole塑料Futaba S3107模拟3-poleFutaba S3108Futaba S3108M3-poleFutaba S3109Futaba S3109MFutaba S3110模拟塑料Futaba S3111模拟塑料Futaba S3111M模拟塑料Futaba S3113模拟衬套塑料Futaba S3114模拟3-pole衬套塑料Futaba S3114M模拟3-pole塑料Futaba S3115模拟塑料Futaba S3117模拟双轴承⾦属Futaba S3150数字空⼼杯单轴承塑料Futaba S3151数字3-pole单轴承塑料Futaba S3152数字空⼼杯塑料Futaba S3153数字⾦属Futaba S3153MG数字塑料Futaba S3154数字20.0 g30.0×10.9×29.0 mm 2.0 千克/厘⽶0.16 秒/60°6.0V:0.13 秒/60°4.8V: 4.8V:9.3 g22.1×10.9×22.1 mm 2.0 千克/厘⽶0.13 秒/60°6.0V: 6.0V:2.4 千克/厘⽶0.11 秒/60°4.8V: 4.8V:8.3 g22.1×10.9×23.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:7.8 g22.1×10.9×23.1 mm 1.5 千克/厘⽶0.10 秒/60°6.0V: 6.0V:1.7 千克/厘⽶0.09 秒/60°4.8V: 4.8V:26.0 g35.1×16.0×25.9 mm 6.8 千克/厘⽶0.57 秒/60°6.0V: 6.0V:8.5 千克/厘⽶0.47 秒/60°4.8V: 4.8V:103.0 g58.9×29.0×50.0 mm 6.4 千克/厘⽶0.24 秒/60°6.0V: 6.0V:8.0 千克/厘⽶0.19 秒/60°4.8V: 4.8V:19.9 g30.0×9.9×29.0 mm 2.2 千克/厘⽶0.15 秒/60°4.8V: 4.8V:47.0 g39.9×20.1×38.1 mm7.1 千克/厘⽶0.25 秒/60°6.0V: 6.0V:8.9 千克/厘⽶0.20 秒/60°4.8V: 4.8V:126.0 g66.0×30.0×56.9 mm19.2 千克/厘⽶0.20 秒/60°6.0V: 6.0V:24.0 千克/厘⽶0.16 秒/60°4.8V: 4.8V:47.1 g40.6×20.1×37.3 mm 2.6 千克/厘⽶0.19 秒/60°6.0V: 6.0V:3.2 千克/厘⽶0.15 秒/60°4.8V: 4.8V:107.0 g58.9×29.0×50.0 mm11.2 千克/厘⽶0.30 秒/60°6.0V: 6.0V:14.0 千克/厘⽶0.26 秒/60°4.8V: 4.8V:72.0 g43.9×23.1×42.9 mm8.8 千克/厘⽶0.70 秒/60°6.0V: 6.0V:11.0 千克/厘⽶0.56 秒/60°4.8V: 4.8V:6.0V: 6.0V:19.0 千克/厘⽶0.20 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm16.8 千克/厘⽶0.29 秒/60°6.0V: 6.0V:21.0 千克/厘⽶0.23 秒/60°4.8V: 4.8V:125.0 g58.9×29.0×50.0 mm13.6 千克/厘⽶0.19 秒/60°6.0V: 6.0V:17.0 千克/厘⽶0.15 秒/60°⾦属Futaba S3155数字⾦属Futaba S3156MG数字Futaba S3157数字Futaba S3157M数字双轴承⾦属Futaba S3170G数字双轴承混合Futaba S3302模拟3-poleFutaba S3303数字双轴承⾦属Futaba S3305模拟3-pole双轴承塑料Futaba S3306模拟3-pole⾦属Futaba S34015-pole双轴承混合Futaba S3801模拟3-pole双轴承混合Futaba S3802模拟3-pole双轴承⾦属Futaba S5050数字5-pole双轴承⾦属Futaba S5301模拟5-pole双轴承⾦属Futaba S5302模拟5-pole83.0 g46.0×24.9×43.9 mm7.8 千克/厘⽶0.10 秒/60°7.2V:7.2V:9.8 千克/厘⽶0.08 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 3.9 千克/厘⽶0.22 秒/60°6.0V: 6.0V:5.2 千克/厘⽶0.18 秒/60°4.8V: 4.8V:31.0 g31.0×16.0×31.0 mm 2.5 千克/厘⽶0.18 秒/60°3.1 千克/厘⽶0.14 秒/60°4.8V: 4.8V:32.0 g35.8×19.6×24.9 mm 4.5 千克/厘⽶0.18 秒/60°6.0V: 6.0V:5.5 千克/厘⽶0.15 秒/60°7.2V:7.2V:6.8 千克/厘⽶0.12 秒/60°4.8V: 4.8V:42.5 g38.6×20.3×34.5 mm 2.5 千克/厘⽶0.20 秒/60°6.0V: 6.0V:3.1 千克/厘⽶0.16 秒/60°4.8V: 4.8V:48.0 g39.9×20.1×36.1 mm 2.9 千克/厘⽶0.16 秒/60°6.0V: 6.0V:3.6 千克/厘⽶0.13 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V:5.8 千克/厘⽶0.18 秒/60°50.0 g39.9×20.1×37.1 mm 4.8V: 4.8V: 9.5 千克/厘⽶0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm16.0 千克/厘⽶0.23 秒/60°6.0V: 6.0V:20.0 千克/厘⽶0.19 秒/60°4.8V: 4.8V:85.0 g49.0×24.9×39.9 mm12.0 千克/厘⽶0.19 秒/60°6.0V: 6.0V:15.0 千克/厘⽶0.15 秒/60°53.0 g48.0×26.9×24.9 mm 4.8V: 4.8V: 4.6 千克/厘⽶0.14 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘⽶0.16 秒/60°6.0V: 6.0V:13.8 千克/厘⽶0.13 秒/60°4.8V: 4.8V:63.0 g39.9×20.1×37.1 mm19.6 千克/厘⽶0.21 秒/60°6.0V: 6.0V:30.6 千克/厘⽶0.14 秒/60°48.2 g40.4×20.1×35.6 mm 6.0V: 6.0V: 5.0 千克/厘⽶0.22 秒/60°4.8V: 4.8V:53.0 g40.9×20.1×38.1 mm 4.0 千克/厘⽶0.27 秒/60°6.0V: 6.0V:5.0 千克/厘⽶0.22 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V: 5.5 千克/厘⽶0.11 秒/60°53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V: 9.5 千克/厘⽶0.19 秒/60°双轴承⾦属Futaba S5801模拟5-pole单轴承塑料Futaba S9001模拟空⼼杯双轴承混合Futaba S9002模拟空⼼杯双轴承⾦属Futaba S9070数字⽆刷Futaba S9101空⼼杯双轴承塑料Futaba S9102模拟空⼼杯双轴承塑料Futaba S9150数字空⼼杯双轴承塑料Futaba S9151数字空⼼杯双轴承⾦属Futaba S9152数字空⼼杯双轴承⾦属Futaba S9153数字空⼼杯塑料Futaba S9154数字空⼼杯⾦属Futaba S9155数字空⼼杯双轴承⾦属Futaba S9156数字空⼼杯双轴承⾦属Futaba S9157数字空⼼杯Futaba S9201模拟双轴承塑料Futaba S9202模拟空⼼杯双轴承Futaba S9203模拟空⼼杯双轴承⾦属Futaba S9204模拟空⼼杯53.9 g40.4×20.1×37.6 mm 4.8V: 4.8V:5.5 千克/厘⽶0.11 秒/60°53.0 g40.9×20.1×38.1 mm 4.8V: 4.8V: 9.5 千克/厘⽶0.19 秒/60°54.0 g40.9×20.1×38.1 mm 4.8V: 4.8V: 5.5 千克/厘⽶0.11 秒/60°57.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:3.7 千克/厘⽶0.07 秒/60°50.0 g39.9×20.1×37.1 mm4.8V: 4.8V:6.6 千克/厘⽶0.14 秒/60°49.3 g38.1×19.1×35.6 mm 4.8V: 4.8V:3.4 千克/厘⽶0.06 秒/60°55.0 g39.9×20.1×37.1 mm4.8V: 4.8V:9.0 千克/厘⽶0.16 秒/60°4.8V: 4.8V:57.0 g39.9×20.1×37.1 mm 3.4 千克/厘⽶0.06 秒/60°26.0 g36.1×15.0×29.0 mm 4.8V: 4.8V: 2.0 千克/厘⽶0.08 秒/60°65.2 g40.4×20.1×39.4 mm 4.8V: 4.8V:7.1 千克/厘⽶0.19 秒/60°51.0 g40.4×20.1×35.6 mm 4.8V: 4.8V:4.1 千克/厘⽶0.28 秒/60°6.0V: 6.0V:5.0 千克/厘⽶0.22 秒/60°61.0 g39.9×20.1×37.1 mm 4.8V: 4.8V:8.0 千克/厘⽶0.15 秒/60°6.0V: 6.0V:10.0 千克/厘⽶0.12 秒/60°4.8V: 4.8V:61.0 g39.9×20.1×37.1 mm11.0 千克/厘⽶0.16 秒/60°6.0V: 6.0V:13.8 千克/厘⽶0.13 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 6.4 千克/厘⽶0.12 秒/60°6.0V: 6.0V:8.0 千克/厘⽶0.10 秒/60°48.2 g40.4×20.1×35.6 mm 4.8V: 4.8V:3.2 千克/厘⽶0.16 秒/60°55.0 g39.1×20.1×37.3 mm4.8V: 4.8V:5.7 千克/厘⽶0.11 秒/60°4.8V: 4.8V:55.0 g40.9×20.1×38.1 mm 5.8 千克/厘⽶0.13 秒/60°6.0V: 6.0V:7.2 千克/厘⽶0.11 秒/60°4.8V: 4.8V:55.0 g40.4×20.1×37.6 mm 6.4 千克/厘⽶0.10 秒/60°6.0V: 6.0V:8.0 千克/厘⽶0.08 秒/60°4.8V: 4.8V:56.0 g40.0×20.0×36.0 mm7.0 千克/厘⽶0.13 秒/60°8.0 千克/厘⽶0.10 秒/60°4.8V: 4.8V:50.0 g39.9×20.1×34.0 mm7.3 千克/厘⽶0.13 秒/60°6.0V: 6.0V:9.2 千克/厘⽶0.11 秒/60°⾦属Futaba S9205双轴承⾦属Futaba S9206模拟空⼼杯双轴承⾦属Futaba S9250数字空⼼杯双轴承⾦属Futaba S9251数字空⼼杯双轴承塑料Futaba S9252数字空⼼杯双轴承塑料Futaba S9253数字空⼼杯双轴承塑料Futaba S9254数字空⼼杯单轴承⾦属Futaba S9255数字空⼼杯塑料Futaba S9256数字双轴承塑料Futaba S9257数字空⼼杯⾦属Futaba S9303模拟空⼼杯Futaba S9304空⼼杯双轴承⾦属Futaba S9350数字空⼼杯⾦属Futaba S9351数字空⼼杯双轴承⾦属Futaba S9402模拟空⼼杯Futaba S9403空⼼杯⾦属Futaba S9404空⼼杯双轴承⾦属Futaba S9405模拟空⼼杯⾦属Futaba S9450空⼼杯双轴承⾦属Futaba S9451数字空⼼杯双轴承⾦属Futaba S9452数字空⼼杯4.8V: 4.8V:43.9 g40.4×20.8×25.4 mm 4.8 千克/厘⽶0.11 秒/60°6.0V: 6.0V:6.0 千克/厘⽶0.09 秒/60°4.8V: 4.8V:45.0 g40.9×20.1×24.9 mm7.1 千克/厘⽶0.14 秒/60°6.0V: 6.0V:8.8 千克/厘⽶0.11 秒/60°31.0 g36.1×15.0×31.0 mm 2.2 千克/厘⽶0.11 秒/60°6.0V: 6.0V:2.7 千克/厘⽶0.09 秒/60°4.8V: 4.8V:26.0 g36.1×15.0×29.0 mm 3.6 千克/厘⽶0.14 秒/60°6.0V: 6.0V:4.5 千克/厘⽶0.11 秒/60°⾦属Futaba S9550空⼼杯双轴承⾦属Futaba S9551数字空⼼杯双轴承⾦属Futaba S9602模拟空⼼杯双轴承塑料Futaba S9650数字空⼼杯。
FUTABA、辉盛舵机资料

TowerPro 辉盛舵机详细资料SERVO Series Rcommend for modelSG50,SG90 for Helicopter,3D-flyer,F3A;MG995,MG945,SG5010 for Gasoline engine plane, train-flyer ;9805BB forSG50 重量- 6.3g尺寸21.5x11.7x25.1mm力矩0.6kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usSG90 重量- 10g尺寸23x12.2x29mm力矩 1.5kg/cm速度0.3sec/60degree(4.8v)工作电压 4.2-6V温度范围0℃_ 55℃带宽10usMG945 重量- 55.0g尺寸40.7*19.7*42.9mm力矩12kg/cm速度0.25sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usMG995 重量- 55.0g尺寸40.7*19.7*42.9mm力矩10kg/cm速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usSG5010 重量- 38g尺寸40.2x20.2x43.2mm力矩 3.1kg/cm(4.8V); 4.5kg/cm(6V);速度0.17sec/60degree(4.8v); 0.4sec/60degree(6v)工作电压4.8-6V温度范围0℃_ 55℃带宽20us9805BB 重量- 160g尺寸66x30.2x64.4mm力矩20kg/cm(6V)速度0.20sec/60degree(4.8v)工作电压 4.8-7.2V温度范围0℃_ 55℃带宽10usFUT ABA舵机参数大全S9150 Digital servo■尺寸:47.5X27X25.3mm■重量:53g■速度:0.18sec/60"(4.8V)■扭力:5.8kg:cm(4.8V)——————————————————————————S9151 Digital servo■尺寸:40X20X36.6mm■重量:50g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V)——————————————————————————S9206■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S9601■尺寸:31X16X30.2mm■重量:31g■速度:0.15sec/60"(4.8V)■扭力:2.4g:cm(4.8V) ——————————————————————————S9250 Digital servo■尺寸:40.5X20X37.5mm■重量:54g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S9253 Digital servo■尺寸:40X20X36.6mm■重量:49g■速度:0.08sec/60"(4.8V)■扭力:2.0kg:cm(4.8V) ——————————————————————————S3103■尺寸:21.8X11X19.8mm■重量:9.5g■速度:0.11sec/60"(4.8V)■扭力:1.2kg:cm(4.8V) ——————————————————————————S3102■尺寸:28X13X29.7mm■重量:21g■速度:0.25sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S9450 Digital servo■尺寸:40.5X20X37.5mm■重量:55g■速度:0.10sec/60"(4.8V)■扭力:8.0kg:cm(4.8V) ——————————————————————————S9251 Digital servo■尺寸:40X20X36.6mm■重量:57g■速度:0.07sec/60"(4.8V)■扭力:3.7kg:cm(4.8V) ——————————————————————————S3101■尺寸:28X13X29.3mm■重量:17g■速度:0.18sec/60"(4.8V)■扭力:2.5kg:cm(4.8V) ——————————————————————————S3002■尺寸:31X16X30.2mm■重量:35g■速度:0.20sec/60"(4.8V)■扭力:3.3g:cm(4.8V) ——————————————————————————S9252 Digital servo■尺寸:40.5X20X36.6mm■重量:50g■速度:0.14sec/60"(4.8V)■扭力:6.6kg:cm(4.8V) ——————————————————————————S9101■尺寸:38.5X19.5X34.5mm■重量:45g■速度:0.16sec/60"(4.8V)■扭力:3.1kg:cm(4.8V) ——————————————————————————S135■尺寸:31X16X29.7mm■重量:29.5g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S9102■尺寸:44.7X22.6X26mm■重量:46g■速度:0.13sec/60"(4.8V)■扭力:3.6kg:cm(4.8V) ——————————————————————————S9202■尺寸:40X20X35.5mm■重量:50g■速度:0.22sec/60"(4.8V)■扭力:5.0kg:cm(4.8V) ——————————————————————————S9001■尺寸:40.4X19.8X36mm■重量:48g■速度:0.18sec/60"(6V)■扭力:5.2kg:cm(6V) ——————————————————————————S3802■尺寸:44X23X43mm■重量:72g■速度:0.56sec/60"■扭力:11.0kg:cm ——————————————————————————S9602■尺寸:36X15X30.7mm■重量:31g■速度:0.09sec/60"(4.8V)■扭力:2.7g:cm(4.8V) ——————————————————————————S9203■尺寸:40.5X20X37.5mm■重量:53g■速度:0.11sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S136G 收轮专用■尺寸:45.2X22.7X25.4mm■重量:42g■速度:0.50sec/60"(4.8V)■扭力:5.5kg:cm(4.8V) ——————————————————————————S3801■尺寸:59.2X28.8X49.8mm■重量:107g■速度:0.26sec/60"■扭力:14.0kg:cm ——————————————————————————S9404■尺寸:39X20X37.4mm■重量:55g■速度:0.11sec/60"■扭力:5.7kg:cm ——————————————————————————S9204■尺寸:40.5X20X37.5mm■重量:53g■速度:0.19sec/60"(4.8V)■扭力:9.5kg:cm(4.8V) ——————————————————————————S135C■尺寸:31X16X30.2mm■重量:29g■速度:0.15sec/60"(4.8V)■扭力:1.9g:cm(4.8V) ——————————————————————————S5301■尺寸:59.2X28.8X49.8mm■重量:125g■速度:0.23sec/60"■扭力:21.0kg:cm ——————————————————————————S9402■尺寸:40.5X20X37.4mm■重量:55g■速度:0.10sec/60"■扭力:8.0kg:cm ——————————————————————————S3003■尺寸:40.4X19.8X36mm■重量:37.2g■速度:0.19sec/60"(6V)■扭力:4.1kg:cm(6V) ——————————————————————————S5801■尺寸:46X25X44mm■重量:83g■速度:0.5sec/60"(7.2V)■扭力:9.8kg:cm(7.2V) ——————————————————————————S3302■尺寸:59.2X28.8X49.8mm■重量:103g■速度:0.19sec/60"■扭力:8.0kg:cmHitec舵机模拟舵机HS-45HB■重量:8g■尺寸:23.6×9.8×22.4mm■拉力:[4.8V] 1.0Kg.cm■转速:[4.8V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-50■重量:6.4g■尺寸:20.9×11.4×22mm■拉力:[4.8V] 0.6Kg.cm■转速:[4.8V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升HS-55■重量:8g■尺寸:22.8×11.6×24mm■拉力:[4.8V] 1.1Kg.cm■拉力:[6.0V] 1.3Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-56HB■重量:10.7g■尺寸:22.6×11.6×24mm■拉力:[4.8V] 1.0Kg.cm■拉力:[6.0V] 1.2Kg.cm■转速:[4.8V] 0.12sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65HB■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-65MG■重量:11.9g■尺寸:23.6×11.6×24mm■拉力:[4.8V] 1.8Kg.cm■拉力:[6.0V] 2.2Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车小型模拟舵机HS-77BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45c/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模HS-81■重量:16.6g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机HS-82MG■重量:19g■尺寸:29.8×12×29.6mm■拉力:[4.8V] 2.6Kg.cm■拉力:[6.0V] 3Kg.cm■转速:[4.8V] 0.11sec/60°■转速:[6.0V] 0.09sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-85BB+■重量:19.2g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型船HS-85MG+■重量:21.9g■尺寸:29×13×30mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.16sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-225BB■重量:27g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-225MG■重量:31g■尺寸:32.4×16.8×31mm■拉力:[4.8V] 3.9Kg.cm■拉力:[6.0V] 4.8Kg.cm■转速:[4.8V] 0.14sec/60°■转速:[6.0V] 0.11sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船标准模拟舵机HS-311■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-322HD■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-325HB■重量:43g■尺寸:40×20×36.5mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 3.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-475HB■重量:40g■尺寸:38.8×19.8×36mm■拉力:[4.8V] 4.4Kg.cm■拉力:[6.0V] 5.5Kg.cm■转速:[4.8V] 0.23sec/60°■转速:[6.0V] 0.18sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船HS-422■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型船HS-425BB■重量:45.5g■尺寸:40.6×19.8×36.6mm■拉力:[4.8V] 3.3Kg.cm■拉力:[6.0V] 4.1Kg.cm■转速:[4.8V] 0.21sec/60°■转速:[6.0V] 0.16sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型船标准高性能模拟舵机HS-625MG■重量:55.2g■尺寸:40.6×19.8×37.8mm■拉力:[4.8V] 5.5Kg.cm■拉力:[6.0V] 6.8Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车HS-635HB■重量:50g■尺寸:40.6×19.8×38.8mm■拉力:[4.8V] 5Kg.cm■拉力:[6.0V] 6Kg.cm■转速:[4.8V] 0.18sec/60°■转速:[6.0V] 0.15sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模HS-645MG■重量:55.2g■尺寸:40.6×19.8×37.3mm■拉力:[4.8V] 7.7Kg.cm■拉力:[6.0V] 9.6Kg.cm■转速:[4.8V] 0.24sec/60°■转速:[6.0V] 0.20sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型直升机、小型车模、小型越野车、小型船HS-965MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 7.4Kg.cm■拉力:[6.0V] 9.5Kg.cm■转速:[4.8V] 0.13sec/60°■转速:[6.0V] 0.10sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船HS-985MG■重量:62g■尺寸:40×20×37mm■拉力:[4.8V] 9.6Kg.cm■拉力:[6.0V] 12.4Kg.cm■转速:[4.8V] 0.16sec/60■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机、小型车模、小型越野车、小型船专业模拟舵机HS-125MG■重量:24g■尺寸:30×10×34mm■拉力:[4.8V] 3Kg.cm■拉力:[6.0V] 3.5Kg.cm■转速:[4.8V] 0.17sec/60°■转速:[6.0V] 0.13sec/60°■推荐用途:竞赛滑翔机、轻量飞机(机翼)HS-755MG■重量:117g■尺寸:59×29×50mm■拉力:[4.8V] 12Kg.cm■拉力:[6.0V] 14.4Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-755HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 0.28sec/60°■转速:[6.0V] 0.23sec/60°■推荐用途:竞赛滑翔机、小型船HS-75BB■重量:35g■尺寸:44×23×25mm■拉力:[4.8V] 6.6Kg.cm■拉力:[6.0V] 8.2Kg.cm■转速:[4.8V] 0.45sec/60°■转速:[6.0V] 0.34sec/60°■推荐用途:竞赛滑翔机、轻量飞机HS-765HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船■回转角度:140°-210°HS-785HB■重量:110g■尺寸:59×29×50mm■拉力:[4.8V] 11Kg.cm■拉力:[6.0V] 13.2Kg.cm■转速:[4.8V] 1.68sec/60°■转速:[6.0V] 1.38sec/60°■推荐用途:帆船收索机■最大回转角底1890°(5 1/4回转)HS-805BB+■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:竞赛滑翔机、小型车模、小型越野车、小型船HS-815BB■重量:152g■尺寸:66×30×57.6mm■拉力:[4.8V] 19.8Kg.cm■拉力:[6.0V] 24.7Kg.cm■转速:[4.8V] 0.19sec/60°■转速:[6.0V] 0.14sec/60°■推荐用途:小型帆船■回转角度:140°-210°舵机选择方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ℹ偸 ⸔ 㦰 ऩ (BASIC) Ё 䗝 ᢽ 㠉 ᴎ 㸠䞣䇗ᭈ(END POINT) 㦰ऩDŽ
䇗ᭈ㠉ᴎ㸠䞣DŽ˄བ˖㼳㗐㠉 ᴎ˅ ݇䯁䆹ࡳ㛑
䗝ᢽᑊ䖯ܹঠ䞡↨⥛(D/R)ˈᛳᑺ ᣛ᭄(EXP)㦰ऩDŽ
᪡ᣛᓩ ࠄ END POINTˈ 䗝ᢽ END POINT ࠄ FLAPˈ VR(A) ࠄᳳᳯⱘ㸠䞣 VR(A)䖯㸠䇗㡖ˈᣝ䳔䞡Ϟ䗄᪡ˈ ࠄ D/R, EXPˈ 䗝ᢽ D/R, EXP
㗐㠉ᴎ˄ϸϾ⬅ Y ᔶ㒓Ⳍ䖲ⱘϸৄ㼳㗐㠉ᴎ˅ⱘ⒥㖨ᴎDŽ䖭辵⠜ൟⱘ⒥㖨ᴎ䆒㕂ㅔ⋕ˈ≵᳝ⱘ䰘ࡴ
ࡳ㛑DŽৃ⏏ࡴ݊ᅗⱘ亲㸠ᴵӊDŽ
g⒥㖨ᴎ(2A+1F)˖⒥㖨ᴎ(2A+1F)ൟ亲ᴎ䗖⫼Ѣ㺙᳝ঠࡃ㗐㠉ᴎऩ㼳㗐㠉ᴎ˄ϸৄ⬅ Y ᔶ䖲఼Ⳍ䖲ⱘ
㼳㗐㠉ᴎ˅ⱘ⒥㖨ᴎDŽ݊ᅗⱘ亲㸠ᴵӊѺৃ䗖⫼DŽ䖭ѯϡৠⱘ亲㸠ᴵӊࣙᣀϡৠⱘᖂ䇗ᴚأ㕂Փ⒥㖨ᴎ
ࠄ TYPEˈ ࠄ GLID(1A+1F)ˈᣝ 䍙䖛 1 金ˈሣᐩᰒ冫ĀAre you sure?āⱘᄫḋᦤ䝦⹂䅸ˈ ⹂䅸DŽ
݇䯁
ᣝϔ ࠄЏ㦰ऩˈݡᣝϔ 䗔ߎDŽ
83
⬉ࡼᴎ݇䯁(MOTER CUT)(⒥㖨ᴎ GLID)˖ᦤկњϔϾㅔऩⱘᮍ⊩ˈৃҹϡㅵぎ⇨ࠍ䔺᪡㒉ᴚⱘԡ㕂ˈা䕏ᢼ ᓔ݇ህৃҹ݇䯁⬉ࡼᴎˈ㠉ᴎⱘ鼠ࡼ䞣䞣Ў-30%DŽ
ᖙ乏䗝ᢽᓔ݇ⱘԡ㕂ᮍDŽ咬䅸䆒㕂Ў NULL ᴹ䙓ܡᛣഄᇚ MOTOR CUT 䆒㕂ᶤᓔ݇Ϟ㗠ᇐ㟈亲㸠Ё㶎ᮟḼذ䕀ᚙⱘމথ⫳DŽ
ৃ䇗ᗻ㛑˖ g↨⥛(RATE)㣗ೈ˖ -30 ࠄ+30DŽ㠉ᴎࡼ䞣Ў 0%ᯊᇍᑨѢぎ⇨ࠍ䔺(AIRBRAKE)᪡㒉ᴚⱘ᳔᜶ԡ㕂ˈ↨⥛Ў -30%ᯊ㠉ᴎࡼ䞣᳔DŽ gᓔ݇(SWITCH) A-H ܼ䚼ৃҹߚ䜡DŽ䘏䕥ᓔ݇(LOGlC SW)(Lsw1-3)ѺৃDŽ gԡ㕂(POSITION)ܼ䚼ৃҹߚ䜡ˈࣙᠺ NULL˄ᐌ⏋݇䯁ᯊ˅ˈৃՓ⫼ৠϔϾᓔ݇ⱘϸϾḷԡ(UP&Cntr Cntr˂Dn)▔⌏⏋ࡳ㛑DŽ
䗝ᢽ⧚ᛇⱘ㠉ᴎᑊড䕀㠉 ᴎ㸠ⱘᮍ˖˄བ˖ড䕀 ᮍ㠉㠉ᴎ˅
ࠄ REVERSE ᑊ䖯ܹˈ 䗝ᢽ REVERSEDŽ ࠄ CH4˖RUDDˈ Փ REV 催҂ ሣᐩᰒ冫ĀAre vou sure?āᣝ 1 金ҹϞ
བ᳝ᖙ㽕ˈ䞡Ϟϔℹ᪡DŽᣝ ࠄ BASIC
81
䆒ᅮВ՟
ᣝ䳔㽕䇗ᭈ㸠 ˈՓПϢൟ 㤤ⱘ㠉䞣ϔ㟈 ˄ᐌ߫㠉䞣Ў催 ↨⥛˅DŽP.43DŽ
䕧ܹ亲ᴎৡ鹵DŽᅠ៤ৢ݇ 䯁ൟ㦰ऩ(MODEL)
ᣝ䳔㽕ࠄ催҂ MODELˈ 䗝ᢽ MODEL ࠄ NAME˄ൟৡ鹵ⱘ佪ᄫヺ催҂˅ ᬍবϔϾᄫヺ˗ᔧড়䗖ⱘᄫヺᰒ冫ৢˈ ࠄ ϟϔϾᄫヺᑊ䞡Ϟϔℹ᪡ˈᣝ ࠄ BASICDŽ
Ўњᮍ֓ࠊ᪡䖯㸠 ᖙ㽕ⱘ㠉ᴎড䕀 (REVERSE) P.42ˊ
⸔㦰ऩ(BASIC)Ёᡒࠄ ᑊᠧᓔ˄㠉ᴎ˅ড䕀 (REVERSE)㦰ऩDŽ
ẔᶹЏሣᐩᎺϞᮍⱘৡ鹵ൟ㓪োˈབᵰൟϡℷ⹂˄ཛ˖ൟ 1˅ˈՓ⫼ MODEL SELECTˈP.34DŽ
ᇚൟ㉏ൟᬍЎ⒥ 㖨ᴎ(1A+1F)DŽ ⊼ᛣ˖䖭ᰃথᇘᴎ ᬍবࡳ㛑ᯊ䳔㽕 ⹂䅸ⱘ辵ࡳ㛑П ϔ
ᠧᓔখ᭄㦰ऩ (PARAMETER)
ᬍবൟ㉏ൟ (MODEL TYPE) ᑊ⹂䅸DŽ
ᠧᓔথᇘᴎDŽᣝԣ 1 金ҹϞ˄བᵰ䖯ܹ催㑻㦰ऩ(ADVANCE)ˈ 䞡ᣝ ˅DŽᣝϟ ˈ Փ PARAMETER 催҂ˈᣝ 䗝ᢽ
ⱘࡳ㛑㗠סফൟ⠅ད㗙䴦ⴤDŽ
gᅮ㗐ᴎ(ACRO)ᦤկ˖
gᖿ䗳῾⒮(SNAP-ROLL)DŽ
gछ䰡㠉⏋ড়ࡃ㗐(ALEVATOR)(⬅ঠछ䰡㠉㠉ᴎᬃᣕ)DŽ
gぎ⇨ࠍ䔺(AIRBRAKE)˄㉏ԐѢ㵊ᓣ⏋[BUTTERFLY]ࡳ㛑˅DŽ
gᇍѢҹ⸱ࡼⱘ⒥㖨ᴎ˖᳝ᗴ䗳䰡Ԣ(IDLE-DOWN)ˈ⊍䮼݇䯁(THR-CUT)ˈ⊍䩜(THROTTLE-
ࠄ AUX-CHˈᣝ 䗝ᢽ AUX-CH ࠄ CH6ˈ ࠄ(VR(D))DŽᣝ㽕∖䞡Ϟ䗄᪡DŽ
P.50
݇䯁㦰ऩDŽ
ᣝϔ ࠄЏ㦰ऩˈݡᣝϔ 䗔ߎDŽ
ϟϔℹ˛
˄ᙼৃЎൟ䆒㕂݊ᅗࡳ㛑˅DŽ ᬭ㒗(TRAINER)˖P.51DŽ 亲㗐ሒ㗐㠉ᴎ˖㾕亲㗐㉏ൟሒ㗐㉏ൟ˖P.56ˈ61DŽ ᖂ䇗ᴚأ㕂(OFFSETS)ˈ㵊ᓣ⏋(BUTTERFLY)ˈ˄ぎ⇨ࠍ䔺[AIRBRAKE]/㵊ᓣ⏋˅݊ᅗ ৃ㓪⏋DŽP.66DŽ 䍋㨑ᶊˈথ⚳㋏㒳ˈ♁䔺ᓔ݇݊ᅗ䕙ࡽ䗮䘧ⱘ䆒㕂˖P.50DŽ 䇗ᭈЁゟᖂ䇗(SUB-TRIMS)ՓПϢЏ㠉ᴎण䇗˖P.54DŽ
䆒ᅮВ՟
ℹ偸
᪡ᣛᓩ
ᠧᓔ⸔㦰ऩ(BASIC)ˈ✊ৢ ᠧᓔ⊍䮼݇䯁(THR-CUT) 㦰 ऩDŽ
ᠧᓔথᇘᴎDŽᣝԣ ऩ(ADVANCE)ˈ䞡ᣝ
1 金ҹϞ˄བᵰ䖯ܹ催㑻㦰 ˅
ᢼࡼᓔ݇ҹޣᇥ↨⥛ ࠄذℶ⬉ࡼᴎDŽ ˄⊼ᛣ˖Դᖙ乏ᣛ⌒ϔ Ͼᓔ݇ᴹࠊDŽ咬䅸 NULL)
▔⌏䆹ࡳ㛑DŽ䗝ᢽ▔⌏ࡳ㛑 ⱘᓔ݇ঞ݊ԡ㕂DŽ
ࠄ SWˈ 䇗ᭈࠄ Gˈ ᇚ G 䇗ᭈࠄЁ䯈ԡ
ࠊछ䰡㠉ⱘᓔ݇ G ৃҹࠊϝ
Ͼԡ㕂DŽ
㕂ˈ䆒㕂ϝ䞡↨⥛䇋䞡Ϟ䗄᪡ˈ
ᇚ㼳㗐ⱘࠊ⬅ 㼳㗐ᖂ䇗ࠊᮟ 䪂 (VR(A)) ᬍ Ў Ꮊ ⒥ ᴚ (VR(D)) ˄ 䕙 ࡽ䗮䘧 AUX-CH˅
⸔ 㦰 ऩ (BASIC) Ё ᡒ ࠄ ᑊ ᠧ ᓔ䕙ࡽ䗮䘧(AUX-CH)㦰ऩ 䗝ᢽ䗮䘧 6˄㼳㗐˅⬅⸔ࠊ বЎ⒥ࡼᴚ(VR(D))ࠊDŽᣝ䳔㽕 ᬍব݊Ҫⱘ䗮䘧DŽ
䆒㕂ঠ䞡ϝ䞡
ࠄ CH> 䗝ᢽ CH>2˄छ䰡㠉˅
↨⥛ᛳᑺᣛ᭄ (D/R, EXP) P.46DŽ
Ϟ䇗 A ሣᐩᰒ冫Ў ELEV(UP)
˄⊼ᛣ˖ሣᐩᎺ ञ䚼ߚⱘЁ䯈ԡ 㕂ᰒ冫䗮䘧㓪ো ⫼᠋ℷ䇗ᭈ
䗝ᢽᶤϔࠊᑣˈ䆒㕂ϔϾ ↨⥛˄བ催↨⥛˅ⱘ㠉䞣ᛳᑺ ᣛ᭄DŽ
ࠄ D/R छ䰡㠉᪡㒉ᴚˈ 䆒㕂 छ䰡㠉᪡㒉ᴚˈ 䆒㕂DŽ˄䗮ᐌℷডⳌৠ˅DŽ
gᇍѢ⒥㖨ᴎˈ䆹ࡳ㛑гৃ⫼ᴹࠊᴎ㗐ᔃᑺDŽᴎ㗐ⱘᔃᑺ⬅ൟއᅮˈབᵰᴎ㗐ᔃᑺ䖛ˈӮ Փᴎԧѻ⫳ϡᖙ㽕ⱘ䰏ˈℸ䕗ᇣⱘᴎ㗐ᔃᑺ˄ϡ䍙䖛 10%˅↨䕗ড়⧚DŽϔѯ㗐ൟབ RG-15 ׂ ᬍ䳔ᜢ䞡DŽৃখ✻ൟݠDŽ g⊼ᛣ˖Ϫ⫼ࡃ㗐Ꮒࡼ(AlLE-DIFF)ᯊेՓ㛑ਃࡼ㗐ൟ㼳㗐(CAMBER FLAP)г≵᳝ӏԩᬜᵰDŽࡃ 㗐Ꮒࡼ(AILE-DIFF)Ёଃϔ㛑ࠊڣ㼳㗐ϔḋࠊࡃ㗐ⱘࡳ㛑ᰃぎ⇨ࠍ䔺/㵊ᔶ⏋DŽ gࡃ㗐Ꮒࡼ(AILE-DIFF)˖ܕ䆌ঠࡃ㗐㠉ᴎѻ⫳ϡৠⱘϞϟ㸠DŽ㾕 P.56DŽ Փ⫼ঠࡃ㗐㠉ᴎⱘ㼳ࡃ㗐⏋ࡃ㗐Ꮒࡼࡳ㛑DŽ䆺㾕 P.60 ᳝݇ AILE-2 ⱘݙᆍDŽ gछ䰡㠉ࡃ㗐⏋(ELEVON)˖䆹ᑣ⫼Ѣ亲㗐DŽ䆺㾕 P.62DŽ gV ൟሒ㗐(V-tail)˖䗖⫼ᑆϸϾ㠉ᴎϔ䍋䖤㸠ᴹᅲ⦄亲ᴎ῾⒮䖢㾦ࠊDŽ䆺㾕 P.63DŽ gछ䰡㠉⏋ড়ࡃ㗐(AILEVATOR)˖ϡ䗖⫼Ѣ⒥㖨ᴎൟDŽ
ࠄ GLID[1A+1F] ᣝ 1 金ҹϞDŽᔧሣᐩᰒ冫ĀAre you sure?āᯊˈ
( PARAMETER)
ᣝ
ࠄ BASICDŽ
ൟ ੑ ৡ(NAME) P.36DŽ˄⊼ᛣ˖㋏㒳ৃ㞾 ࡼᄬټ᭄ˈ⫼᠋ϡᖙ 㸠ᄬټDŽ
⸔㦰ऩ(BASIC)Ёᠧᓔ ൟ㦰ऩ(MODEL) ᴹ ࠄ ൟ ੑ ৡ (MODEL NAME) 㦰ऩ
㟇Ѣࡳ㛑Փ⫼ⱘԧ㒚㡖ˈ䆺ᚙ䇋㾕䆹Ⳍⱘݠᑨࡳ㛑䚼ߚDŽЎњᮍ֓ᙼⱘ䯙䇏ˈ义ⷕ䆒㕂ݠ
ⱘϔᷣDŽ
䆒ᅮВ՟
ℹ偸
᪡ᣛᓩ
ḍൟ䇈ᯢкᅝ㺙ད᠔᳝ⱘ㠉ᴎǃᓔ݇ᬊᴎDŽܜᠧᓔথᇘᴎⱘ⬉⑤ᓔ݇ˈ
亲㸠ࠡⱘޚᎹ
✊ৢᠧᓔᬊᴎⱘ⬉⑤ᓔ݇ˈ䇗ᭈ䖲ᴚՓ㠉䴶ሙЁDŽᴎẄᮍ䴶ˈ䇗ᭈϾ 䖲ᴚՓПሑৃ㛑㊒ޚ䖯㗠䖒ࠄড়䗖ⱘࠊ㠉䞣ᑊ䙓ܡ䍙㸠DŽḌᶹ㠉ᴎⱘᮍ
䆒㕂ঠछ䰡㠉㠉ᴎ˖㾕 P.62
*䘏䕥ᓔ݇ LOGIC SW(Lsw 1-3)ܼ䛑ৃҹߚ䜡DŽ䆒㕂䘏䕥ᓔ݇(LOGIC SW)ˈ㾕 P.42
䗔ߎDŽ
84
⒥㖨ᴎ催㑻ࡳ㛑㦰ऩ
ḋⱘᴎ㗐㉏ൟሒ㗐㉏ൟ˄ঠࡃ㗐㠉ᴎˈঠछ䰡㠉㠉ᴎˈछ䰡㠉ࡃ㗐⏋ˈV ൟሒ㗐ㄝ˅DŽ㾕 P.56-63 ⱘ ᴀ䇈ᯢDŽ
g㼳ࡃ㗐⏋(FLAPERON)˄ҙᣛ⒥㖨ᴎ[1A+1F]˅˖ঠࡃ㗐㠉ᴎড᪡ᯊЎࡃ㗐ᴹՓ⫼ˈ㗠ৠ᪡ ᯊЎ㼳㗐ᴹՓ⫼DŽ㾕 P.46. g㗐ൟ㼳㗐(CAMBER FLAP)˖ৃ䖯㸠㗐ൟ鼠ࡼ㼳㗐ᖂ䇗ㄝ᪡DŽ㾕 P.58
Փ THR-CUT 催҂ˈᣝ 䗝ᢽ ࠄ MIXˈ ࠄ OFF ៤ ON ࠄ SWˈ ࠄᣛᅮⱘᓔ݇
ࠄ POSIˈ ࠄᣛᅮԡ㕂
ࠄ RATEˈ ࠄ݇䯁
݇䯁
ᣝϔ ࠄЏ㦰ऩˈݡᣝϔ
䆒㕂ঠ/ϝ䞡↨⥛ᛳᑺᣛ᭄(D/R,EXP)˖㾕 P.46DŽ
ϟϔℹ˛
䆒㕂ᬭ㒗(TRAINER)ࡳ㛑˖㾕 P.51DŽ 䆒㕂ঠࡃ㗐㠉ᴎ˖㾕 P.56DŽ
PARAMETER 催҂ˈᣝ 䗝ᢽ PARAMETER
⊼ᛣ˖া᳝䖯㸠ڣ 䖯 ܹ ൟ ㉏ ൟ (MODEL ൟ䞡㕂(MODEL RESET)ㄝ TYPE) 㦰ऩ
ࠄ MODEL TYPE
䞡ᬍবᯊᠡ䳔㽕ᣝ݊ ᅗᣝ䬂DŽ䖭ᰃথᇘᴎ ᬍবࡳ㛑ᯊ䳔㽕⹂䅸ⱘ 辵ࡳ㛑ПϔDŽ
ܜ䗝ᢽড়䗖ⱘൟ㉏ൟ (MODEL TYPE)˗བ˖⒥㖨 ᴎ(GLID[1A+1F])DŽ✊ৢ⹂䅸 ᬍ˗᳔ৢ݇䯁খ᭄㦰ऩ
NEEDLE)⏋⊍䮼ᓊ䖳(THROTTLE DELAY)ㄝᑣDŽ
g✊㗠ᅮ㗐ᴎ(ACRO)㔎Уৃѻ⫳ܼ㗐ሩࡃ㗐ⱘ⏋ࡳ㛑ৃ↣辵亲㸠ᴵӊ˄᱂䗮ˈ䍋亲ˈ䗳ᑺˈ䎱
行ⴔ䰚˅ϟ⣀ゟ䆒㕂ⱘᖂ䇗ᴚأ㕂(OFFSET)DŽ
g⒥㖨ᴎ(1A+1F)˖⒥㖨ᴎ(1A+1F)ൟ亲ᴎ䗖⫼Ѣᅝ㺙᳝ϔϸৄࡃ㗐㠉ᴎ˄≵᳝ࡃ㗐㠉ᴎѺৃ˅ϔৄऩ㼳
82
⒥㖨ᴎⱘ⡍⅞ࡳ㛑䇈ᯢ