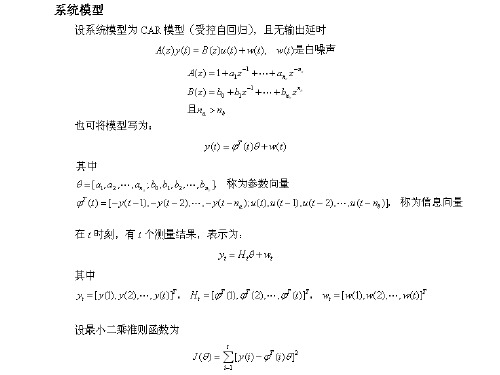
最小方差自校正控制Matlab程序
9种谱校正方法及matlab代码

9种谱校正方法及matlab 程序代码采样间隔归一化成1T ∆=,采样长度为N .这样FFT 离散谱线为0,1)i X i N =-(,相应的频率分辨率2/(1/)N f N ωπ∆=∆=. 设FFT 离散谱线局部极高谱线为m (为了数学上简洁,假定从0开始,注意在MATLAB 环境下数组实际操作的是从1开始),记频偏量δωδω=∆. 我们需要使用谱线m 和与之相邻一条次高谱线,记这连续两条谱线中左边一条序号为M (当次高谱线在m 左侧时1M m =-,反之M m =).下面列出若干算法的δ计算公式1. 加矩形窗的精确谱校正[1]i i i X U jV =+111()sin()()cos()M M M M opt M MV V M U U M K U U ωω+++-∆+-∆=- 1211cos()sin()cos()sin()opt M M opt M M K M Z V U M K M Z V U M ωωωωωω++-∆⎡⎤=+⎢⎥∆⎣⎦-∆+∆⎡⎤=+⎢⎥∆+∆⎣⎦ 2121cos()cos()()Z M Z M M m Z Z ωωωδ∆+∆-∆=+-- 2. 加矩形窗情形,采用解析单频模型的幅值比校正[1, 2]11||()||||M M M X M m X X δ++=+-+ 3. 加汉宁窗情形,采用解析单频模型的幅值比校正[1, 2]112||||()||||M M M M X X M m X X δ++-=+-+ 4. 加矩形窗情形,采用解析单频模型的复比值校正[3]11Re ()M M M X M m X X δ++⎛⎫=+- ⎪-⎝⎭5. 加汉宁窗情形,采用解析单频模型的复比值校正[3]112()M M M MX X M m X X δ+++=+-- 6. 加矩形窗情形,采用解析单频模型的复合复比值校正[3]11Re ()M m M M X M m X X δ++⎛⎫=+- ⎪-⎝⎭ 11m R m mX X X δ++=-,1111m m L m m m m X X X X X X δ---=-=-- 0.5)0.5)m L m R δδδδδ=-++((7. 加汉宁窗情形,采用解析单频模型的复合复比值校正[3]112Re ()M M m M M X X M m X X δ++⎛⎫+=+-⎪-⎝⎭ 112m m R m mX X X X δ+++=-,1111221m m m m L m m m m X X X X X X X X δ----++=-=-- 0.5)0.5)m L m R δδδδδ=-++((8. 加矩形窗,Quin 校正[4]11Re()Re(),Re()Re()m m L R m m X X X X αα-+== 11L R L R L Rααδδαα==---,, 00 R R L R δδδδδ>>⎧=⎨⎩当且其它9. 加汉宁窗,Quin 校正[4]11Re()Re(),Re()Re()m m L R m m X X X X αα-+== 212111L RL R L Rααδδαα++==---,,00 R R L R δδδδδ>>⎧=⎨⎩当且其它References1. Schoukens, J., R. Pintelon,H. Van Hamme. The interpolated fast Fourier transform: Acomparative study . IEEE Transactions on Instrumentation and Measurement. 1992, 41(2):226-232.2. 谢明,丁康. 频谱分析的校正方法.振动工程学报. 1994, 7(2): 172-179.3. 陈奎孚, 王建立,张森文. 频谱校正的复比值法.振动工程学报(已投). 2007.4. Quinn, B.G. Estimating frequency by interpolation using Fourier coefficients.IEEETransactions on Signal Processing. 1994, 42(5): 1264-1268.%========================这是调用调试==================DT=1;N=1024;PHI=pi/3;Ampl=1;CiR=11.9; %cycles in recordFreq=CiR/(DT*N); %frequencyTV=[0:N-1];DatVec=Ampl*cos(Freq*TV*2*pi+PHI);FV=fft(DatVec);figuresubplot(2,1,1);plot(TV,DatV ec);subplot(2,1,2);plot(abs(FV(1:round(N/2.56))));grid on[MV,MI]=max(abs(FV));%加矩形窗的解析校正--1FreqShift=SpecCorr(FV,MI,N,1);%加矩形窗的解析单频模型校正--2FreqShift=SpecCorr(FV,MI,N,2);%加汉宁窗的解析单频模型校正--3HanDat=DatVec.*hanning(N,'periodic')';FV=fft(HanDat);FreqShift=SpecCorr(FV,MI,N,3);%加矩形窗的解析单频模型校正+复比值法--4FV=fft(DatVec);FreqShift=SpecCorr(FV,MI,N,4);%加汉宁窗的解析单频模型校正+复比值法--5HanDat=DatVec.*hanning(N,'periodic')';FV=fft(HanDat);FreqShift=SpecCorr(FV,MI,N,5);%加矩形窗的解析单频模型校正+复比值法+左右平均--6FV=fft(DatVec);FreqShift=SpecCorr(FV,MI,N,6);%加汉宁窗的解析单频模型校正+复比值法+左右平均--7HanDat=DatVec.*hanning(N,'periodic')';FV=fft(HanDat);FreqShift=SpecCorr(FV,MI,N,7);%加矩形窗的解析单频模型校正+Quinn算法--8FV=fft(DatVec);FreqShift=SpecCorr(FV,MI,N,8);%加汉宁窗的解析单频模型校正+Quinn算法--9HanDat=DatVec.*hanning(N,'periodic')';FV=fft(HanDat);FreqShift=SpecCorr(FV,MI,N,9);===========这是子程序======================%spectrum correction assemble% the sampling interval is 1 s (or unitary)%Input: SpecVec--Discrte Fourier Spectrum from FFT% PeakIdx--the peak index, noting the matrix in MatLab start from 1% TL--the length (or the point number) of the FFT% method--correction method% output: PeakShift-- the corrected peak shifting from the peak in discrete% spectrumfunction PeakShift=SpecCorr(SpecVec,PeakIdx,TL,method)% picking up the second highest spectrum lineif(abs(SpecVec(PeakIdx-1))>abs(SpecVec(PeakIdx+1)))IP=[PeakIdx-1,PeakIdx];ShiftCorr=-1; %shift aligning with the PeakIdxelseIP=[PeakIdx,PeakIdx+1];ShiftCorr=0; %shift aligning with the PeakIdxendII=IP(1)-1; % noting that the index of a matrix in MATLAB starts from 1, not zero if(method==1) %an analyitic solution for rectangular windowU=real(SpecVec(IP));V=imag(SpecVec(IP));DW=2*pi/TL;KOPT=(sin(II*DW)*(V(2)-V(1))+cos(II*DW)*(U(2)-U(1)))/(U(2)-U(1));Z=V.*(KOPT-cos((IP-1)*DW))./(sin(DW*(IP-1)))+U;Tmp1=(Z(2)*cos(DW*(II+1))-Z(1)*cos(DW*II))/(Z(2)-Z(1));PeakPos=acos(Tmp1)/DW;PeakShift=PeakPos-(PeakIdx-1);elseif(method==2) %based on the analytical-single-tone model for rectangular window PeakShift=abs(SpecVec(IP(2)))/(abs(SpecVec(IP(2)))+abs(SpecVec(IP(1))));PeakShift=PeakShift+ShiftCorr; %shift aligning with the PeakIdxelseif(method==3) %based on the analytical-single-tone model for Hanning windowPeakShift=(2*abs(SpecVec(IP(2)))-abs(SpecV ec(IP(1))))/(abs(SpecV ec(IP(2)))+abs(SpecVec(IP(1 ))));PeakShift=PeakShift+ShiftCorr; %shift aligning with the PeakIdxelseif(method==4) %based on the analytical-single-tone model for rectangular window with complex correctionPeakShift=real(SpecVec(IP(2))/(SpecVec(IP(2))-SpecVec(IP(1))));PeakShift=PeakShift+ShiftCorr; %shift aligning with the PeakIdxelseif(method==5) %based on the analytical-single-tone model for Hanning window with complex correctionPeakShift=(2*SpecVec(IP(2))+SpecVec(IP(1)))/(SpecVec(IP(2))-SpecVec(IP(1)));PeakShift=real(PeakShift)+ShiftCorr; %shift aligning with the PeakIdx elseif(method==6) %based on the analytical-single-tone model for rectangular window with complex correction+averagePeakShift=real(SpecVec(IP(2))/(SpecVec(IP(2))-SpecVec(IP(1))));MaxPeakShift=PeakShift+ShiftCorr; %shift aligning with the PeakIdxLeftShift=real(SpecVec(PeakIdx)/(SpecVec(PeakIdx)-SpecVec(PeakIdx-1)))-1;RightShift=real(SpecVec(PeakIdx+1)/(SpecVec(PeakIdx+1)-SpecVec(PeakIdx)));%averagePeakShift=(0.5-MaxPeakShift)*LeftShift+(0.5+MaxPeakShift)*RightShift;elseif(method==7) %based on the analytical-single-tone model for Hanning window with complex correction+average,????PeakShift=(2*SpecVec(IP(2))+SpecVec(IP(1)))/(SpecVec(IP(2))-SpecVec(IP(1)));MaxPeakShift=real(PeakShift)+ShiftCorr; %shift aligning with the PeakIdxLeftShift=(2*SpecVec(PeakIdx)+SpecV ec(PeakIdx-1))/(SpecVec(PeakIdx)-SpecVec(PeakIdx-1))-1;RightShift=(2*SpecVec(PeakIdx+1)+SpecV ec(PeakIdx))/(SpecVec(PeakIdx+1)-SpecVec(PeakIdx ));%averagePeakShift=(0.5-MaxPeakShift)*LeftShift+(0.5+MaxPeakShift)*RightShift;elseif(method==8) %Quinn method for the rectangular windowa1 = real(SpecV ec(PeakIdx-1)/SpecVec(PeakIdx)); %lefta2 = real(SpecV ec(PeakIdx+1)/SpecVec(PeakIdx)); %rightLeftShift = a1/(1-a1);RightShift = -a2/(1-a2);if (LeftShift>0 & RightShift>0)PeakShift = RightShift;elsePeakShift = LeftShift;endelseif(method==9) %Quinn method for the Hanning windowa1 = real(SpecV ec(PeakIdx-1)/SpecVec(PeakIdx)); %lefta2 = real(SpecV ec(PeakIdx+1)/SpecVec(PeakIdx)); %rightLeftShift = (2*a1+1)/(1-a1);RightShift = -(2*a2+1)/(1-a2);if (LeftShift>0 & RightShift>0)PeakShift = RightShift;elsePeakShift = LeftShift;endendend。
自适应控制--第五讲 最小方差自校正控制
3
最小方差控制
最小方差调节的基本思想是: 由于系统中信道存在着k步时滞,这就使得当前的控制作 用u(t)要到k个采样周期后才能对输出产生影响. 因此,要获得输出方差最小,就必须对输出量提前k步进行 预报,然后根据预报值来计算适当的调节作用u(t). 这样,通过不断的预报和调节,就能始终保持输出量的稳 态方差为最小.
1
自校正控制
控制器 参数设计
ˆ
辨识器
ˆ c
r(t)
控制器
u(t)
被控对象
y 过程为:
面对的三个问题: (1)对过程进行在线递推参数估计; (2)设计控制率; (3)设计在计算机上如何实现;
2
最小方差自校正控制
• 闭环系统可辨识条件 • 最小方差控制
• 最小方差自校正控制
• 广义最小方差控制 • 基于广义最小方差控制
闭环系统可辨识条件
闭环系统可辨识条件
闭环系统可辨识条件
Q( z ) C ( z ) F ( z ), Q( z )的阶次大于等于n 又 F ( z )是已知的 C ( z )的参数有唯一解,可辨识
闭环系统可辨识条件
其它最小二乘法参数估计
– – –
遗忘因子递推最小二乘法参数估计 增广最小二乘法参数估计 广义最小二乘法参数估计
遗忘因子递推最小二乘法参数估计
• 当采用递推最小二乘法时,已有的所有信息向量都会在递 推过程中发挥作用,因此随着时间的推移,新采集到的信 息向量对参数估计值的修正作用会逐渐减弱,称为“数据 饱和”现象,也就是说递推算法的计算效率逐渐降低。当 被辨识的系统参数缓慢时变时,递推最小二乘法参数估计 不能很好地实现系统辨识。 • 遗忘因子递推最小二乘法参数估计是在递推公式中加入遗 忘因子,逐渐减小旧信息向量在参数估计中的权重,以加 强新信息向量的作用,跟随系统参数的时变。
在Matlab中实现自适应控制算法的简明指南

在Matlab中实现自适应控制算法的简明指南自适应控制是一种能够自动调整控制系统参数以适应未知或复杂环境的技术,它广泛应用于机器人技术、工业生产等领域。
Matlab作为一种强大的数值计算和数据分析工具,提供了丰富的工具箱和函数来支持自适应控制算法的实现。
本文将以简明的方式介绍如何在Matlab中实现自适应控制算法。
1. 引言自适应控制算法的核心思想是通过不断迭代和更新控制系统参数,根据系统实时反馈信号调整控制器的输出,以使系统能够在不确定或变化的环境中实现优化控制。
Matlab作为一种强大的数值计算工具,提供了多种自适应控制算法的实现方法,并通过丰富的工具箱支持算法的调试和优化。
2. 算法选择在选择自适应控制算法之前,需要根据系统的特点和要求明确控制的目标。
常见的自适应控制算法包括模型参考自适应控制(MRAC)、非线性自适应控制(NLAC)、自适应模糊控制(AFC)等。
根据需要选择合适的算法,并从Matlab提供的工具箱中调取相关函数。
3. 数据准备实现自适应控制算法需要准备好系统的控制输入和反馈信号的数据。
可以通过Matlab内置的数据采集和处理函数来获取或模拟这些数据。
确保数据的准确性和可靠性对于算法的正确实现至关重要。
4. 算法初始化在开始实现自适应控制算法之前,需要对算法的参数进行初始化。
根据所选的算法,利用Matlab提供的函数设置算法的初始值和参数范围。
这些参数将在算法迭代和优化的过程中不断调整和更新。
5. 算法迭代一旦算法初始化完成,即可开始算法的迭代和训练。
通过不断观测系统的输入和输出信号,不断调整控制器的参数以适应系统的变化情况。
Matlab提供了多种迭代方法和优化算法,如梯度下降法、最小二乘法等,可根据算法的需求选择合适的方法。
6. 参数更新在算法的迭代过程中,控制器的参数将不断更新。
根据算法的特点和目标,使用Matlab提供的优化函数和工具箱来更新参数。
控制器的参数更新将基于系统的实际反馈信息和算法的误差函数来进行优化。
MATLAB中的自适应控制算法详解

MATLAB中的自适应控制算法详解MATLAB是一种强大的数学计算软件,被广泛应用于各个领域的科学研究和工程实践中。
在控制系统领域中,自适应控制算法是一种重要的技术手段,能够使系统根据外部环境或内部变化来自动调整控制策略,以提高系统的鲁棒性和适应性。
本文将详细介绍MATLAB中的自适应控制算法及其应用。
一、自适应控制概述自适应控制是一种基于系统模型的反馈控制方法,它可以使控制系统根据系统的动态特性和变化环境实现自动调整。
自适应控制算法通过实时估计系统模型参数,并根据估计结果调整控制器参数,使系统具备更好的鲁棒性和适应性,能够应对系统参数的变化和外界扰动。
二、自适应控制算法的基本原理MATLAB中的自适应控制算法主要基于参数估计和参数调整两个步骤。
首先,通过系统的输入输出数据对系统模型参数进行估计,可以使用最小二乘法、最小均方误差法等常见的参数估计方法。
然后,根据估计结果,对控制器参数进行调整,使系统的输出满足给定的性能要求。
常用的控制器参数调整方法有模型参考自适应控制、直接自适应控制等。
三、MATLAB中的自适应控制工具箱MATLAB提供了丰富的自适应控制工具箱,方便用户进行自适应控制算法的设计和仿真。
其中最常用的工具箱有System Identification Toolbox、Control System Toolbox和Simulink等。
System Identification Toolbox提供了一系列参数估计方法和模型辨识算法,可以方便地对系统进行动态参数估计。
Control System Toolbox则提供了多种自适应控制算法和控制器设计工具,可以快速实现自适应控制策略。
Simulink是一种基于图形化界面的仿真环境,可以方便地搭建系统模型并进行仿真验证。
四、自适应控制算法的应用案例自适应控制算法在各个领域都有广泛的应用,下面以机器人控制为例进行说明。
机器人控制是一个典型的非线性、强耦合的多输入多输出系统,传统的控制方法往往难以适应复杂的动态特性。
matlab自整定pid算法
matlab自整定pid算法
MATLAB中有多种方法可以自整定PID算法,以下是其中两
种常见的方法:
1. Ziegler-Nichols方法:
- 首先,将PID控制器的P和I增益设置为零,将D增益设置
为一个较小的非零值。
- 增加P增益,直到系统出现持续的高频振荡。
记录下此时的
P增益,记为Ku。
- 根据振荡的周期T,计算出临界增益Kc:Kc = 0.6 * Ku。
- 将PID控制器的增益重新设置为零,根据以下公式计算PID
控制器的增益:Kp = 0.6 * Kc,Ki = 1.2 / (T * Kc),Kd = 0.075 / (T * Kc)。
- 将这些增益值设置到PID控制器中,进行实际的控制。
2. AMIGO方法:
- 首先,收集系统的开环响应数据,包括输入信号和输出信号。
- 使用AMIGO工具箱读取数据并进行预处理。
- 选择合适的模型结构,例如一阶传递函数、二阶传递函数等。
- 使用AMIGO工具箱中的模型校准方法,例如最小二乘法或
极大似然法,将模型参数校准到实际数据中。
- 根据得到的模型参数,计算PID控制器的增益值。
- 将这些增益值设置到PID控制器中,进行实际的控制。
根据具体的系统和要求,可以选择适合的自整定方法,并使用MATLAB进行实现。
用MATLAB进行控制系统的超前校正设计
用MATLAB进行控制系统的超前校正设计超前校正是一种用于控制系统设计的技术,它通过提前预测系统的动态性质,并校正输出信号,以改善系统的性能和稳定性。
在MATLAB中,我们可以使用控制系统工具箱来进行超前校正的设计。
超前校正的设计步骤如下:1. 确定系统的传递函数模型:首先,我们需要确定待控制系统的数学模型,通常使用传递函数表示。
在MATLAB中,我们可以使用`tf`函数定义传递函数。
例如,如果系统的传递函数为G(s) = (s + 2)/(s^2 + 5s + 6),可以用以下命令定义该传递函数:```matlabG = tf([1 2], [1 5 6]);```2.确定要求的超前时间常数和相位余量:超前校正的目标是在系统的低频区域增加相位余量,以提高系统的稳定性和性能。
我们需要根据应用需求确定所需的超前时间常数和相位余量。
一般来说,相位余量取值在30到60度之间较为合适。
3.计算所需的超前网络增益:根据所需的超前时间常数和相位余量,可以使用以下公式计算所需的超前网络增益:```matlabKc = 1 / sqrt(phi) * abs(1 / evalfr(G, j * w_c))```其中,phi为所需的相位余量,w_c为所需的截止角频率,evalfr函数用于计算传递函数在复频域上的值。
4. 设计超前校正网络:超前校正网络通常由一个增益项和一个零点组成,用于提高低频响应的相位余量。
使用`leadlag`函数可以方便地设计超前校正网络。
例如,以下命令可以设计一个零点在所需截止频率处的超前校正网络:```matlabw_c=1;%所需的截止角频率phi = 45; % 所需的相位余量Gc = leadlag(w_c, phi);```5. 计算开环传递函数和闭环传递函数:使用`series`函数可以计算超前校正网络和原系统传递函数的乘积,得到开环传递函数。
而使用`feedback`函数可以根据需要计算闭环传递函数。
《MATLAB控制系统仿真》PID控制系统校正设计
《MATLAB控制系统仿真》PID控制系统校正设计引言1.PID校正装置PID校正装置也称为PID控制器或PID调节器。
这里P,I,D分别表示比例、积分、微分,它是最早发展起来的控制方式之一。
2.PID校正装置的主要优点原理简单,应用方便,参数整定灵活。
适用性强,在不同生产行业或领域都有广泛应用。
鲁棒性强,控制品质对受控对象的变化不太敏感,如受控对象受外界扰动时,无需经常改变控制器的参数或结构。
在科学技术迅速发展的今天,出现了许多新的控制方法,但PID由于其自身的的优点仍然在工业过程控制中得到最广泛的应用。
PID控制系统校正设计1.设计目的1.1 熟悉常规PID控制器的设计方法1.2掌握PID参数的调节规律1.3学习编写程序求系统的动态性能指标2.实验内容2.1在SIMULINK窗口建立方框图结构模型。
2.2设计PID控制器,传递函数模型如下。
()⎪⎭⎫⎝⎛++=s T s T k s G d i p c 112.3修改PID 参数p K 、i T 和d T ,讨论参数对系统的影响。
3.4利用稳定边界法对PID 参数p K 、i T 和d T 校正设计。
2.5根据PID 参数p K 、i T 和d T 对系统的影响,调节PID 参数实现系统的超调量小于10%。
3. 实验操作过程3.1在SIMULINK 窗口建立模型图1 设计模型方框图3.2设计PID 控制器图2 PID控制器模型3.3利用稳定边界法对PID参数p K、i T和d T校正设计: 表1 PID稳定边界参数值校正后的响应曲线图3(a)校正后的响应曲线图3(b)校正后的响应曲线3.4调节PID参数实现系统的超调量小于10%:表2 PID 参数图4 响应曲线图4.规律总结1.P控制规律控制及时但不能消除余差,I控制规律能消除余差但控制不及时且一般不单独使用,D控制规律控制很及时但存在余差且不能单独使用。
2.比例系数越小,过渡过程越平缓,稳态误差越大;反之,过渡过程振荡越激烈,稳态误差越小;若p K过大,则可能导致发散振荡。
matlab 校正函数

在MATLAB中,可以使用多种方法来创建和实现校正函数。
这些函数可以用于处理图像、信号、数据等,以提高其质量或满足特定的要求。
以下是一个简单的例子,展示如何使用MATLAB创建一个简单的校正函数:
```matlab
% 创建一个校正函数
function output = correction_function(input)
% 这是一个简单的线性校正函数
output = input + 10;
end
```
这个函数接收一个输入值,然后返回这个值加上10。
这只是一个非常简单的例子,实际上你可以根据需要创建更复杂的校正函数。
要使用这个函数,你只需要调用它,并将你想要校正的数据作为输入:
```matlab
input_data = [5, 10, 15, 20]; % 这是你想要校正的数据
corrected_data = correction_function(input_data); % 使用校正函数处理数据
```
在这个例子中,`corrected_data`将会是`[15, 20, 25, 30]`,这是原始数据加上10的结果。
请注意,这只是一个非常基础的例子。
在实际应用中,校正函数可能会更复杂,并且可能需要处理多个输入、具有不同的参数,或者需要使用非线性算法。
但是基本的思路是一样的:创建一个函数,将输入数据传递给该函数,然后得到校正后的输出数据。
matlab最小均方误差算法代码

Matlab是一种强大的数学软件,它具有丰富的数学函数和工具箱,以及灵活的编程语言。
在Matlab中,最小均方误差算法(MMSE)是一种用于信号处理和数据分析的重要算法。
本文将介绍Matlab中最小均方误差算法的实现及相关代码。
1. 算法原理最小均方误差算法(MMSE)是一种线性滤波器设计方法,用于估计信号或系统的参数。
其目标是最小化估计误差的平方的期望值,即最小化误差的均方值。
2. MMSE算法实现步骤MMSE算法的实现主要包括以下几个步骤:(1) 确定系统模型:首先需要确定信号或系统的数学模型,例如线性时不变(LTI)系统的系统方程或信号的数学表示。
(2) 确定观测数据:获取观测或采样数据,用于估计信号或系统的参数。
(3) 计算最小均方误差估计:根据观测数据和系统模型,利用MMSE准则计算参数的估计值,使估计误差的均方值最小化。
(4) 代码实现:在Matlab中,可以使用内置函数或自定义函数实现MMSE算法,对观测数据进行处理并计算最小均方误差估计。
3. Matlab代码实现以下是一个简单的示例,演示如何在Matlab中实现最小均方误差算法:```matlab生成信号和噪声N = 1000; 信号长度x = randn(N, 1); 随机信号n = randn(N, 1); 噪声添加噪声snr = 10; 信噪比y = x + 10^(-snr/20)*n; 添加噪声MMSE估计h = 0.5; 系统参数xhat = filter(h, 1, y); MMSE估计绘制结果figure;plot(x, 'b'); hold on;plot(y, 'r'); hold on;plot(xhat, 'g--');legend('原始信号', '受噪声信号', 'MMSE估计');```在上述示例中,首先生成一个随机信号x和随机噪声n,然后将它们相加得到受噪声信号y。
matlab约束多变量函数最小值

matlab约束多变量函数最小值MATLAB是一款功能强大的数学软件,可以进行高级计算、可视化和分析。
在MATLAB中,我们常常需要求解函数的最小值,特别是对于多个变量和多个约束条件的情况。
在这篇文章中,我们将介绍如何使用MATLAB求解这种复杂情况下的函数最小值问题。
1. 建立函数模型首先,我们需要建立一个用来表示目标函数的模型。
我们可以在MATLAB中定义一个函数,该函数以多个变量作为输入,并返回一个标量,该标量表示所要最小化的目标值。
例如,我们要寻找函数f(x,y) = x^2 + y^2的最小值,我们可以在MATLAB中定义一个函数:function [val] = objfun(x)val = x(1)^2 + x(2)^2;end这个函数使用一个向量作为输入,其中第一个元素是x,第二个元素是y。
它返回一个标量,即x^2 + y^2。
这个函数代表了我们要找寻最小值的函数。
2. 添加约束条件在许多情况下,我们需要对函数进行约束,以满足实际应用需求。
例如,我们可能需要对变量增加范围限制,或者限制两个变量的比例等条件。
约束条件可以表示为等式或不等式,可以将其添加到主函数中,以便MATLAB求解器考虑这些条件。
例如,我们可以添加如下约束:function [c, ceq] = constraints(x)c = [2*x(1) + x(2) - 1; -x(1) + x(2)];ceq = [];end这个函数使用一个向量作为输入,其中第一个元素是x,第二个元素是y。
通过这个函数,我们可以设置两个不等式约束条件,并返回一个向量c,其中c(1)=2x1+x2−1,c(2)=−x1+x2,分别表示第一个和第二个约束条件。
我们选择这两个约束条件是,最优解要在2x1+x2−1≤0和−x1+x2≤0的约束范围内取得。
3. 求解最小化问题MATLAB提供了许多内置的最小化函数,例如fmincon和fminsearch等,可用于求解非线性函数的最小化问题。
DMC算法MATLAB编程及仿真
一、前言工业生产的过程是复杂的,建立起来的模型也是不完善的。
即使是理论非常复杂的现代控制理论,其效果也往往不尽人意,甚至在一些方面还不及传统的PID控制。
20世纪70年代,人们除了加强对生产过程的建模、系统辨识、自适应控制等方面的研究外,开始打破传统的控制思想,试图面向工业开发出一种对各种模型要求低、在线计算方便、控制综合效果好的新型算法。
在这样的背景下, 预测控制的一种,也就是动态矩阵控制(DMC )首先在法国的工业控制中得到应用。
因此预测控制不是某种统一理论的产物,而是在工业实践中逐渐发展起来的。
预测控制中比较常见的三种算法是模型算法控制(MAC),动态矩阵控制(DMC )以及广义预测控制。
本篇所采用的是动态矩阵控制,其采用增量算法,因此在消除稳态余差方面非常有效。
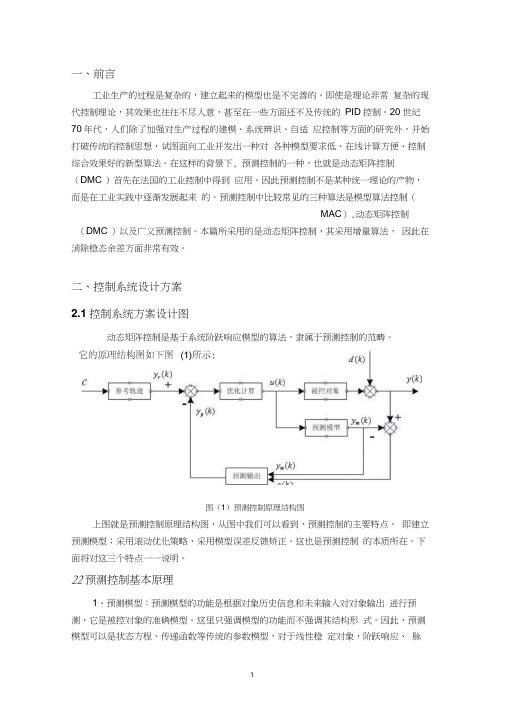
二、控制系统设计方案2.1控制系统方案设计图动态矩阵控制是基于系统阶跃响应模型的算法,隶属于预测控制的范畴。
图(1)预测控制原理结构图上图就是预测控制原理结构图,从图中我们可以看到,预测控制的主要特点。
即建立预测模型;采用滚动优化策略,采用模型误差反馈矫正。
这也是预测控制的本质所在。
下面将对这三个特点一一说明。
22预测控制基本原理1、预测模型:预测模型的功能是根据对象历史信息和未来输入对对象输出进行预测,它是被控对象的准确模型。
这里只强调模型的功能而不强调其结构形式。
因此,预测模型可以是状态方程、传递函数等传统的参数模型,对于线性稳定对象,阶跃响应、脉冲响应这类非参数模型也可以作为预测模型使用。
预测模型具有展示系统未来动态行为的功能,这样,就可以利用预测模型来预测未来时刻被控对象的输出变化及被控变量与其给定值的偏差,作为控制作用的依据,使之适应动态系统所具有的因果性的特点,得到比常规控制更好的控制效果。
2、滚动优化:预测控制是一种优化控制算法,它是通过某一性能指标的最优来确定未来的控制作用。
这一性能指标涉及到系统未来的行为。
如,通常可取被控对象输出在未来的采样点上跟踪某一期望轨迹的方差最小,性能指标中涉及到的系统未来的行为,是根据预测模型由未来的控制策略决定的。
最小方差自适应pid控制 c语言
最小方差自适应pid控制c语言1. 引言1.1 概述在控制领域,PID控制是一种常见且广泛应用的控制算法,它通过对被控对象进行调节来使其输出值尽量接近设定值。
然而,传统的PID控制算法存在一些局限性,例如无法适应系统参数变化、过程干扰等问题。
为了克服这些问题,自适应PID控制算法被提出,并在实际应用中取得了显著的效果。
本文将介绍一种基于最小方差原理的自适应PID控制算法,并着重讨论其在C 语言中的实现。
C语言作为一种常用的编程语言,在嵌入式系统领域具有广泛的应用。
通过利用C语言实现自适应PID控制算法,能够提高系统稳定性和响应速度,并且方便进行调试和验证。
1.2 文章结构本文共分为五个部分进行阐述。
首先,在引言部分概括了整篇文章的内容,并简要介绍了自适应PID控制和C语言在控制领域的应用。
接下来,在第二部分中详细介绍了最小方差自适应PID控制的概念和原理。
第三部分主要讨论了C语言在控制领域的优势以及实现PID控制算法的基本思路。
然后,在第四部分中详细描述了最小方差自适应PID控制算法的设计与实现细节,包括算法流程图和关键步骤解析。
最后,在第五部分总结实验结果并展望可能存在的问题和改进方向,并提出使用该算法的建议。
1.3 目的本文的目标是介绍最小方差自适应PID控制算法,并通过C语言代码实现该算法,使读者能够深入了解该算法原理及其应用。
同时,希望通过对实验结果的分析和总结,提供一些改进方向和建议,为在嵌入式系统中应用自适应PID控制算法的开发者提供参考。
2. 最小方差自适应PID控制概述2.1 PID控制简介PID控制是一种常用的反馈控制算法,它通过不断调整输出来使得被控对象的输出与期望值尽可能接近。
PID控制算法由比例项(P项)、积分项(I项)和微分项(D项)组成。
- 比例项:根据当前误差的大小,以一定的比例调整输出。
- 积分项:累加历史误差,并进行补偿。
- 微分项:考虑误差变化趋势,用于抑制系统过冲和震荡。
matlab中lsqcurvefit的用法

MATLAB中lsqcurvefit的用法概述在M AT LA B中,`ls qc u rv ef it`是一个用于非线性最小二乘拟合的函数。
该函数可以求解一组非线性方程或拟合一组数据,以最小化残差平方和。
函数语法```m at la b[x,r es no rm,r es idu a l,ex it fl ag,o utp u t,la mb da,j ac obi a n]=l s q c ur ve fi t(fu n,x0,x da ta,y da ta,l b,u b,o pt io ns)```参数说明-`fu n`:自定义函数句柄,用于计算模型预测值和实际观测值之间的残差。
该函数应接受参数x和xd at a作为输入,返回模型预测值。
-`x0`:拟合参数的初始猜测值。
-`xd at a`:实际观测值的自变量数据。
-`yd at a`:实际观测值的因变量数据。
-`lb`:拟合参数的下界限制。
-`ub`:拟合参数的上界限制。
-`op ti on s`:可选参数,用于指定拟合过程中的详细设置,如最大迭代次数、收敛容限等。
示例假设我们有一组数据,需拟合出一个指数函数模型。
首先定义自定义函数`e xp Fu nc`,用于计算指数函数的预测值和实际观测值之间的残差。
```m at la bf u nc ti on y=ex pF unc(x,xd at a)y=x(1)*e xp(x(2)*x d at a);e n d```然后,我们准备好数据和初始猜测值,并调用`l sq cu rv ef it`进行拟合。
```m at la bx d at a=[01234];y d at a=[12.66.714.529.6];x0=[11];[x,r es no rm,r es idu a l,ex it fl ag,o utp u t,la mb da,j ac obi a n]=l s q c ur ve fi t(@e xp Fun c,x0,xd at a,yd ata);```输出结果-`x`:拟合出的参数值。
利用matlab的控制系统的校正及源程序
(一)、设计思想 先根据题中的要求指标及其给定的数值选定合适的K,(可由,原系统的
Bode图得出),根据算出的数据可以确定校正函数,由校正函数和原函数得到校 正后的函数,然后验证所求结果。
(二)、设计的主要步骤及其程序与结果 在校正函数的求解中有多种方法,可由自动控制原理书中的知识求解,也可 由查阅资料的Matlab中的函数方式求的。 1/9
4/9
System: A Peak amplitude: 1.6 1.8 Overshoot (%): 60.3 At time (sec): 3.13
1.6
Step Response
1.4
System: B
1.2
Peak amplitude: 1.36
Overshoot (%): 36.2
1
At time (sec): 4.86
0
Magnitude (dB)
-50
-100
Phase (deg)
-150 -90
-135 -180 -225 -270
10-2
Response: untitled1 Frequency (rad/sec): 1.03 Phase (deg): -162
10-1
100
101
102
Frequency (rad/sec)
Matlab课程设计
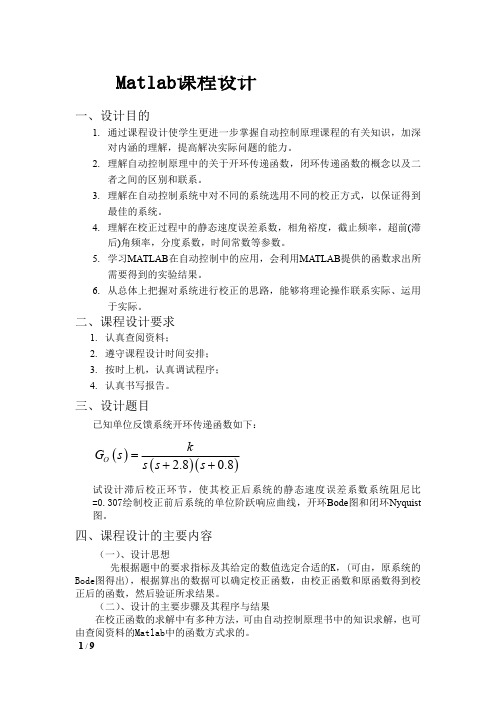
一、设计目的
1. 通过课程设计使学生更进一步掌握自动控制原理课程的有关知识,加深 对内涵的理解,提高解决实际问题的能力。
2. 理解自动控制原理中的关于开环传递函数,闭环传递函数的概念以及二 者之间的区别和联系。
3. 理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到 最佳的系统。
自适应控制第五讲最小方差自校正控制

原理:通过实时调整控制参数,减 小误差,提高控制精度
优势:自校正控制能够适应不同 飞行环境和任务需求,提高无人 机执行任务的可靠性和成功率
最小方差自校正 控制的未来发展
最小方差自校正控制与其他控制方法的融合
最小方差自校正控制与模糊控制融合,提高系统的鲁棒性和适应性 最小方差自校正控制与神经网络控制融合,实现自适应学习和优化控制 最小方差自校正控制与滑模控制融合,降低系统的抖动和提高快速响应性能 最小方差自校正控制与多智能体系统融合,实现分布式协同控制和优化
线性方程组。
最小方差自校正控制的算法流程
确定系统参数: 根据系统特性 和要求,确定 需要估计的系
统参数。
建立模型:根 据已知的参数, 建立系统的数
学模型。
计算最优控制律: 根据建立的模型 和最小方差自校 正控制算法,计 算最优控制律。
实施控制:将计 算出的最优控制 律应用到实际系 统中,实现自校
正控制。
智能交通:用于实现智能交通信号控制,提高道路通行效率和交通安全。
航空航天:用于控制飞行器的姿态、高度、速度等参数,提高飞行器的稳定性和安全性。
机器人控制:用于实现机器人的精准定位、姿态控制、避障等功能,提高机器人的智能水平 和自主性。
最小方差自校正 控制的基本原理
最小方差自校正控制的数学模型
最小方差自校正 控制的应用实例
最小方差自校正控制在工业控制中的应用
简介:最小方差自校正控制是一种先进的控制算法,在工业控制领域中具有广泛的应用前景。
应用实例:该算法在化工、制药、钢铁等行业的反应釜温度控制、流量控制等方面取得了显著 的效果。
优势:最小方差自校正控制算法具有自适应、自学习、自校正等特点,能够快速适应工业现场 的复杂变化,提高控制精度和稳定性。
最小方差控制
2 最小方差控制
最小方差控制的目的是要确定u(k),使得输出的方差为最 小,由于u(k)最早只能影响到y(k+d),因此选择性能指标为
J E{ y(k d ) }
2
(14)
上式可改写为:
ˆ (k d k ) ~ J E{ y (k d ) 2 } E{[ y y (k d k )]2 } ˆ (k d k ) 2 } E{~ E{ y y (k d k ) 2 }
在最小方差调节器的研究中,所讨论的被控系统的模型为 A(q-1)y(k)=B(q-1)u(k-d)+C(q-1)e(k) (1)
1 1 n A ( q ) 1 a q a q 其中: 1 n
B (q 1 ) b0 b1q 1 bn q n C (q 1 ) 1 c1q 1 cn q n
刻及以前的输入输出的函数。若对预测的要求是使预测的误差平 方即系统误差的方差为最小,则损失函数可表示为:
ˆ (k d k ) y (k d )]2 } J E{[ y
1 1 1 B ( q ) F ( q ) G ( q ) 1 2 ˆ ( k d k ) F ( q )e( k d ) E{[ y u ( k ) y ( k )] } 1 1 C (q ) C (q ) (10) 上式中F(q-1)e(k+d)与其它项均不相关,且由于{e(k)}为零均值 白噪声序列,式(10)可写为
1 最小方差预测
设在k时刻已观测到输出值y(k),y(k-1),…等,希望由此得到预 测值 y ˆ (k d k ) 。
1 1 B ( q ) C ( q ) 由式(1)有: y (k d ) u (k ) e(k d ) 1 1 A(q ) A(q )
lm算法matlab程序

lm算法matlab程序在lm算法matlab程序的编写过程中,我们需要先了解lm算法的基本原理和步骤,然后结合matlab语言特点进行具体实现。
下面将介绍lm算法的基本原理和在matlab中的程序编写步骤。
一、lm算法基本原理lm算法,全称Levenberg-Marquardt算法,是一种参数优化算法。
它主要用于非线性最小二乘问题的求解,通过调整参数的方式使得参数值能够最小化目标函数的误差。
该算法结合了高斯-牛顿法和最速下降法的优点,既能够收敛速度较快,又能够获得较精确的参数估计。
lm算法的基本思想是通过不断迭代调整参数值,使得目标函数的误差逐渐减小。
具体而言,它通过计算雅可比矩阵(Jacobian matrix)和李方差矩阵(Levenberg-Marquardt matrix)来更新参数值。
在每一次迭代中,首先计算目标函数的梯度,然后根据梯度和李方差矩阵的乘积来调整参数值。
如果调整后的参数值能够使目标函数的误差减小,则接受该调整并继续下一轮迭代;否则,减小李方差矩阵的乘积,再次尝试调整参数值。
总的来说,lm算法是一种迭代优化算法,通过不断更新参数值来求解非线性最小二乘问题。
接下来我们将具体介绍在matlab中如何编写lm算法的程序。
二、matlab程序编写步骤在matlab中,编写lm算法的程序主要包括以下几个步骤:1. 定义目标函数:首先要定义一个目标函数,它是一个关于参数的函数,用来计算目标函数的值。
可以根据具体的问题定义不同的目标函数,例如,可以定义一个二次函数作为目标函数。
2. 初始化参数:在开始迭代之前,需要给参数赋初值。
初值的选择通常是根据经验和问题的特点来确定的,可以根据实际情况进行调整。
3. 迭代计算:迭代计算是lm算法的核心部分。
在每一次迭代中,需要计算目标函数的梯度和李方差矩阵的乘积,并根据结果来更新参数值。
4. 判断终止条件:在进行迭代计算的过程中,需要不断判断是否满足终止条件。
matlab 离差平方和最小化

文章标题:探索matlab中的离差平方和最小化在数据分析和统计学中,离差平方和最小化是一个重要的概念。
在matlab中,我们可以利用各种工具和函数来实现离差平方和最小化的目标。
在本文中,我们将深入探讨matlab中离差平方和最小化的原理、方法和应用。
通过本文的阅读,你将能够全面理解离差平方和最小化的概念,掌握在matlab中如何使用离差平方和最小化进行数据分析和建模,以及对离差平方和最小化的理解和个人观点。
一、离差平方和最小化的概念和原理离差平方和最小化是指通过调整模型参数,使得实际观测值与模型预测值之间的差异的平方和达到最小的过程。
在统计学中,我们经常使用最小二乘法来实现离差平方和最小化的目标。
在matlab中,可以利用`lsqnonlin`、`lsqcurvefit`等函数来进行最小二乘法求解,从而实现离差平方和最小化的目标。
二、matlab中离差平方和最小化的方法和工具在matlab中,有许多内置函数和工具可以帮助我们实现离差平方和最小化的目标。
除了最小二乘法以外,还可以使用`fmincon`、`fminunc`等函数进行非线性最小化,从而实现对离差平方和的优化。
matlab还提供了丰富的统计工具箱,如`Curve Fitting Toolbox`、`Optimization Toolbox`等,可以帮助我们更便捷地实现离差平方和最小化的目标。
三、离差平方和最小化在实际中的应用离差平方和最小化在实际中有着广泛的应用。
在金融领域,可以利用离差平方和最小化来对股票价格进行建模和预测;在经济学领域,可以利用离差平方和最小化来对经济数据进行分析和回归;在生物科学领域,可以利用离差平方和最小化来对生物数据进行拟合和模拟。
在matlab中,我们可以通过调用相关函数和工具,快速、高效地实现这些应用。
四、个人观点和理解对于离差平方和最小化,我个人认为它是一个非常重要的概念。
在实际数据分析和建模中,经常需要利用离差平方和最小化来优化模型参数,使得模型更好地拟合观测数据。
最小方差控制

(21) (22)
则最小方差控制律式(17)可写成: (q-1)u(k)=- (q-1)y(k) 或: u(k ) -[ 0 y(k ) 1 y(k 1) n1 y(k n 1)
1u(k-1) n d 1u(k-n d 1)]/ 0
因此当上式中第2项为0时,可使J最小。因此最小方差预测为: (12)
ˆ (k d k ) 的方差为 最小方差预测估计的误差 ~ y (k d k ) y(k d ) - y
2 2 1 2 ~ var{y (k d k )} E{[ F (q )e(k d )] } (1 f1 f d 1 ) 2 (13)
对该系统,有如下假设: 1. 被控系统时滞时间d以及时滞算子q-1的多项式A、B和C的阶 次及系数都已知; 2. 被控系统为最小相位系统,即多项式B(q-1)的所有零点都在单 位圆内; 3.A(q-1) 、 C(q-1) 所有零点都为稳定的 , 即所有零点都在单位 圆内; 4. {e(k)}为零均值白色噪声序列,且E{e2(k)}=2.
u(k ) -5.64y(k) 2.24y(k1 )-3.7u(k1 )-1.6u(k-2 )
而:var[y(k )] (1 f12 ) 2 11.24 2
最小方差调节系统的闭环稳定性质
• 由被控系统模型 Ay(k)=Bu(k-d)+Ce(k) 和最小方差调节律 u(k)=-[G/(BF)]y(k) 可得调节系统的闭环框图如图2所示. 由图 2 可以导出最小方差调 节系统的闭环方程
预测误差
(25) (26)
~ ˆ (k d k ) F (q1 )e(k d ) y (k d k ) y(k d ) y
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
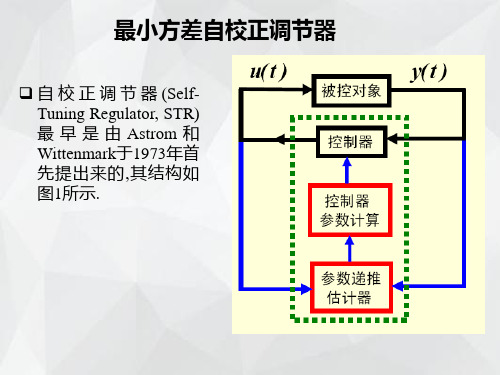
最小方差自校正控制Matlab 程序1.自校正控制自适应控制有很多种,例如模型参考自适应控制系统、自校正控制系统等。
自校正控制(STC)最早是由R.E. Kalman 在1958年提出的,他设计了基于最小二乘估计和有限拍控制的自适应控制器,并为了实现这个控制器,还建造了一台专用模拟计算机,但其发展受到了当时的硬件问题的闲扰。
图1间接自校正控制系统 图2直接自校正控制系统 自校正控制系统也有内环和外环。
内环与常规反馈系统类似,外环由对象参数递推估计器和控制器计算机构组成,其任务是由递推估计器在线估计被控对象参数,用以代替对象的未知参数,然后由设计机构按一定的规则对可调控制器的参数进行在线求解,用以修改内环的控制器。
自校正控制器是在线参数估计和控制参数在线设计两者的有机结合。
另外,在参数估计时,对观测数据的使用方式有两种。
一种是不直接更新控制器参数,而是先估计被控对象模型本身的未知参数,然后再通过设计机构得到控制器参数,如图 1所示,称为间接算法,另一种是直接估计控制器参数,这时需要将过程重新参数化,建立一个与控制器参数直接关联的估计模型,称为直接算法,如图2。
2.最小方差自校正Matlab 算法仿真(直接自校正和间接自校正)设被调对象为CARMA 模型111()()()()()()d A z y t z B z u t C z t ξ----=+其中,1121111()1 1.70.7()10.5()10.2A z z z B q z C z z -------=-+=+=+式中,()k ξ为方差为1的白噪声。
(一)取初值6ˆ(0)10(0)0P I θ==、,0ˆf 的下界为min 0.1f =,期望输出()r y k 为幅值为10的方波信号,采用最小方差直接自校正控制算法,观察不同时滞d=1、4、8时,最小方差自校正算法的控制效果。
(a)时滞为1 (b)时滞为4(c)时滞为8图4-2 最小方差直接自校正算法仿真结果(二)取初值6ˆ(0)10(0)0.001P I θ==、。
期望输出()ry k 为幅值为10的方波信号,用增广递推最小二乘法进行参数估计,采用最小方差间接自校正控制算法,仿真效果如图4-3,d=4。
图4-3 最小方差间接自校正算法仿真效果(d=4)Matlab 程序:%程序:最小方差直接自校正控制(MVC )算法clear all; close all;a=[1 -1.7 0.7]; b=[1 0.5]; c=[1 0.2]; d=4; %对象参数na=length(a)-1; nb=length(b)-1; nc=length(c)-1; %na 、nb 、nc 为多项式A 、B 、C 阶次 nf=nb+d-1; %nf 为多项式F 的阶次L=400; %控制步数uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i);yk=zeros(na,1); %输出初值yrk=zeros(nc,1); %期望输出初值xik=zeros(nc,1); %白噪声初值yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; %期望输出xi=sqrt(0.1)*randn(L,1); %白噪声序列[e,f,g]=sindiophantine(a,b,c,d); %求解单步Diophantine方程for k=1:Ltime(k)=k;y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik];%采集输出数据u(k)=(-f(2:nf+1)*uk(1:nf)+c*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g*[y(k);yk(1:na-1)])/f(1);%求控制量%更新数据for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);for i=nc:-1:2yrk(i)=yrk(i-1);xik(i)=xik(i-1);endif nc>0yrk(1)=yr(k);xik(1)=xi(k);endendsubplot(2,1,1);plot(time,yr(1:L),'r:',time,y);xlabel('k'); ylabel('y_r(k)、y(k)');legend('y_r(k)','y(k)');subplot(2,1,2);plot(time,u);xlabel('k'); ylabel('u(k)');%程序:最小方差间接自校正控制clear all; close all;a=[1 -1.7 0.7]; b=[1 0.5]; c=[1 0.2]; d=4; %对象参数na=length(a)-1; nb=length(b)-1; nc=length(c)-1; %na、nb、nc为多项式A、B、C阶次nf=nb+d-1; %nf为多项式F的阶次L=400; %控制步数uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i);yk=zeros(na,1); %输出初值yrk=zeros(nc,1); %期望输出初值xik=zeros(nc,1); %白噪声初值xiek=zeros(nc,1); %白噪声估计初值yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; %期望输出xi=sqrt(0.1)*randn(L,1); %白噪声序列%RELS初值设置thetae_1=0.001*ones(na+nb+1+nc,1); %非常小的正数(这里不能为0)P=10^6*eye(na+nb+1+nc);for k=1:Ltime(k)=k;y(k)=-a(2:na+1)*yk+b*uk(d:d+nb)+c*[xi(k);xik]; %采集输出数据%递推增广最小二乘法phie=[-yk;uk(d:d+nb);xiek];K=P*phie/(1+phie'*P*phie);thetae(:,k)=thetae_1+K*(y(k)-phie'*thetae_1);P=(eye(na+nb+1+nc)-K*phie')*P;xie=y(k)-phie'*thetae(:,k); %白噪声的估计值%提取辨识参数ae=[1 thetae(1:na,k)']; be=thetae(na+1:na+nb+1,k)'; ce=[1 thetae(na+nb+2:na+nb+1+nc,k)'];if abs(be(2))>0.9be(2)=sign(ce(2))*0.9; %MVC算法要求B稳定endif abs(ce(2))>0.9ce(2)=sign(ce(2))*0.9;end[e,f,g]=sindiophantine(ae,be,ce,d); %求解单步Diophantine方程u(k)=(-f(2:nf+1)*uk(1:nf)+ce*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-g*[y(k);yk(1:na-1)])/f(1); %求控制量%更新数据thetae_1=thetae(:,k);for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);for i=nc:-1:2yrk(i)=yrk(i-1);xik(i)=xik(i-1);xiek(i)=xiek(i-1);endif nc>0yrk(1)=yr(k);xik(1)=xi(k);xiek(1)=xie;endendfigure(1);subplot(2,1,1);plot(time,yr(1:L),'r:',time,y);xlabel('k'); ylabel('y_r(k)、y(k)');legend('y_r(k)','y(k)'); axis([0 L -20 20]); subplot(2,1,2);plot(time,u);xlabel('k'); ylabel('u(k)'); axis([0 L -40 40]); figure(2)subplot(211)plot([1:L],thetae(1:na,:));xlabel('k'); ylabel('参数估计a');legend('a_1','a_2'); axis([0 L -3 2]); subplot(212)plot([1:L],thetae(na+1:na+nb+1+nc,:)); xlabel('k'); ylabel('参数估计b、c'); legend('b_0','b_1','c_1'); axis([0 L 0 1.5]);。