步进电动机
步进电动机的控制

1.工作原理 2.接线 3.控制方式 4.其他
一、步进电动机的简介
步进电动机(stepping motor)是将电脉冲激励 信号转换成相应的角位移或线位移的离散值控制 电动机,这种电动机每当输入一个电脉冲就动一 步,所以又称脉冲电动机。 urage the signal for the electric pulses to the displacement or the displacement of discrete values control motors, motor when entering a electric pulses will move a step, also called a pulse the motor.
由上述分析可知,要使磁阻式步进电机具有工作能力,最起码的条件是定子极分度 角不能被齿距角整除,且应满足下列方程: 极分度角/齿距角= R + k· 1/m 进一步化简得齿数z: z = q (mR + k) (2-3) 式中:m──相数; q──每相的极数; k──≤ (m - 1)的正整数; R──正整数,为0、1、2、3……。 按选定的相数和不同的极数,由上式就可推算出转子齿数。 因为三相双三拍步进电机不易失步,控制精度比较高,所以本文对三相双三拍步 进电机进行控制,定子有三对磁极,运行时两相同时通电,循环带动转子转动。 4、转速控制 控制步进电机的运行速度,实际上是控制系统发出时钟脉冲的频率或换相的周 期,即在升速过程中,使脉冲的输出频率逐渐增加;在减速过程中,使脉冲的输出频 率逐渐减少。脉冲信号的频率可以用软件延时和硬件中断两种方法来确定。 采用软件延时,一般是根据所需的时间常数来设计一个子程序,该程序包含一定 的指令,设计者要对这些指令的执行时间进行严密的计算或者精确的测试,以便确 定延时时间是否符合要求。每当延时子程序结束后,可以执行下面的操作,也可用 输出指令输出一个信号作为定时输出。采用软件定时, CPU一直被占用,因此CPU 利用率低。 可编程的硬件定时器直接对系统时钟脉冲或某一固定频率的时钟脉冲进行计 数,计数值则由编程决定。当计数到预定的脉冲数时,产生中断信号,得到所需的延 时时间或定时间隔。由于计数的初始值由编程决定,因而在不改动硬件的情况下, 只通过程序变化即可满足不同的定时和计数要求,因此使用很方便。
第四讲 步进电动机
1
步进电机的控制
(2)控制步进电机的转向 如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则
电机就反转。
(3)控制步进电机的速度 如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一 步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机发出的脉冲频率, 就可以对步进电机进行调速。
目 录
1
2
步距角和静态步距误差 最大静转矩 矩频特性 起动频率和连续运行频率
11
3 4
1
步距角和静态步距误差
步距角也称为步距,是指步进电动机改变一次通电方式转子转过的角度。步 距角与定子绕组的相数、转子的齿数和通电方式有关。
2
最大静转矩
步进电动机的静特性,是指步进电动机在稳定状态(即步进电动机处于通电 状态不变,转子保持不动的定位状态)时的特性,包括静转矩、矩角特性及静 态稳定区。静转矩是指步进电动机处于稳定状态下的电磁转矩。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM) 和混合式步进电机(简称HB)。
1
步进电机的控制
步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。其基本原 理作用如下: (1)控制换相顺序 通电换相这一过程称为脉冲分配。例如:三相步进电机的三拍工作方
式, 其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制
混合式步进电机(简称HB)。
1
打印机中步进电机的常见故障排查
打印机步进电机的制造精度较高,其故障主要表现为不进纸。判断该类电机 是否损坏,可采用以下方法: 1. 根据步进电机上所标注的阻值测量其电阻。 2. 测量时可先用万用表将引线分为两组(各引线相通的为一组),再用测电阻 的方法找出每一组的中心抽头端,中心端应对其他两端等电阻且与标注电阻值相 符。 3. 用步进电机上所标注的电源电压(或电路中电机的工作电压)进行试验。 4. 有的步进电机具有两个相同的绕组,但无中心抽头端。
步进电机培训教材

步进电动机简介一、步进电动机概述1.1步进电机特点步进电动机(stepping motor)也称脉冲电动机、脉动电动机、分级电动机;更老一些叫法也叫阶动电动机。
这种电动机以规定的次序对定子线圈励磁,每次只转动一定的角度。
这种电动机主要特点如下:(1)控制电路步进电动机的驱动控制电路是将脉冲分配到各相线圈中去的逻辑分配电路,或者是对线圈提供励磁的驱动开关电路。
这种电路同其他伺服控制电路相比较是很简单。
(2)对数控机器的适应性步进电动机很容易同应用微机的设备组合起来,优点是对旋转角度、速度、正反转;启动停止等动作的控制准确、迅速。
(3)定位控制直流电动机等伺服电动机进行定位控制时,使转子保持在某一角度,一定要不间断通电,以达到制动作用。
而步进电机只要维持励磁就能得到保持转矩。
永磁型、混合型步进电动机即使切断励磁也能得到定位转矩;因此,用步进电动机实现准确的定位控制既简单、成本又低。
(4)步距角误差步进电动机的角度误差通常是基本步距角的5%左右,因此输入脉冲没有积累误差,所以定位精度很高。
(5)低转速、高转矩步进电动机与其他类似电动机比较,是属于低速、高转矩电动机。
其他伺服电动机的工作转速在1000rpm以上,而以每秒1000个脉冲的速度来驱动1.8°的步进电动机时转速只有300rpm,以它是属于低转速、高转矩的电动机。
(6)速度可变控制步进电机的旋转角度同输入脉冲成正比,旋转速度同输入的脉冲(频率)成正比,只要简单的改变脉冲速率,就能达到大幅度控制速度变化的目的。
(7)可靠性高步进电机除了轴承以外没有电刷、换向器等磨损部分,无须特殊的维修保养是可靠性高寿命长的电动机。
(8)稳定性差步进电动机的驱动转矩随着转子旋转的位置而变化,而每次励磁都会引起转矩的波动,所以速率的波动比较大。
另外电动机的转矩和惯量决定着电动机固有的频率和驱动脉冲速率,同步进电动机安装的固有的振动之间引起共振,而产生共振噪音,这是一大缺点。
步进电动机课件ppt
驱动电路类型
常见的步进电动机驱动电 路包括H桥、A4988等。
驱动电路元件
驱动电路的主要元件包括 晶体管、二极管、电容等 ,用于实现电流的放大和 转换。
步进电动机的常见
04
问题与解决方案
步进电动机的常见问题
电机发热过高
电机运行噪音过大
电机在运行过程中发热过高,可能是由于 电机过载、通风不良、绕组故障等原因。
定制化
随着市场的多样化需求,步 进电动机将逐渐实现定制化 生产,满足不同客户和行业 的特殊需求。
步进电动机的未来展望
更广泛的应用领域
随着步进电动机性能和效率的提高,其 应用领域将进一步扩大,涉及到更多行
业和领域。
更智能的集成系统
未来步进电动机将与传感器、控制器 等智能器件集成,形成更智能的控制
系统。
步进电动机的旋转角度和速度 可以通过控制脉冲的数量和频
率来实现高精度的控制。
响应速度快
步进电动机的转动速度和方向 可以通过控制脉冲的频率和相 序来快速响应。
低速性能好
步进电动机在低速时仍能保持 较好的稳定性和平滑性,不会 出现丢步或过冲的现象。
可靠性高
步进电动机的结构简单,维护 方便,且使用寿命长,可靠性
它广泛应用于各种自动化设备、机器 人、数控机床等领域,是实现精密控 制的重要元件之一。
步进电动机的分类
根据结构分类
根据工作电流方式分类
有齿型步进电动机、无齿型步进电动 机、混合型步进电动机等。
有直流步进电动机和交流步进电动机 。
根据相数分类
有单相、两相、三相和多相步进电动 机。
步进电动机的工作原理
步进电动机的驱动
03
控制
步进电动机驱动器
步进电机介绍

普通高等教育“十一五”国家级规划教 第十二页,共52页。
4.步进电机
每秒钟输入f 脉冲(màichōng),则转过 f/ZrN 转,故电机转速为:
n 60 f rpm ZrN
4. 小步(xiǎo bù)距角磁阻式步 进电机 转子上有t 均3匀460分0布9的40个齿.
s3 ZrN 6 043 03 61 03
4.步进电机
2. 三相双三拍运行方式 按AB-BC-CA-AB或相反的顺序通电,每次同
时(tóngshí)给两相绕组通电,且三次换接为一个循 环。步距角与三相单三拍运行方式的步距角相同。
AB相导通
BC相导通
普通高等教育“十一五”国家级规划教 第十页,共52页。
4.步进电机
3. 三相单、双六拍运行方式 按A-AB-B-BC-C-CA或相反(xiāngfǎn)顺序通电,即需 要六拍才完成一个循环,s因此6t 步9距60角为15:
低频共振现象
普通高等教育“十一五”国家级规划教 第二十八页,共52页。
4.步进电机
➢脉冲频率很高时的连续运行 ➢ 当控制脉冲的频率很高时,脉 冲间隔的时间很短,电机转子尚未到 达第一次振荡的幅值,甚至还没有到 达新的稳定平衡位置,下一个脉冲就 到来。此时电机的运行已由步进变成 了连续平滑的转动(zhuàn dòng), 转速也比较稳定。 ➢ 当频率太高时,也会产生失步, 甚至还会产生高频振荡。
➢ 一、反应式步进电动机的结构(jiégòu) ➢ 单段式
➢ 多段式
➢ a)径向磁路 ➢ b)轴向磁路
普通高等教育“十一五”国家级规划教 第四页,共52页。
4.步进电机
径向磁路(cílù) 1—线圈;2—定子;3—转子
轴向磁路(cílù) 1—线圈;2—定子;3—磁轭
步进电机基本参数

步进电机基本参数步进电机是一种将电脉冲信号转换为相应的机械转动的电动机。
它是一种开环控制的电动机,具有高可靠性、精确性、稳定性和高效率等特点,广泛应用于机器人、数控机床、自动化设备等领域。
步进电机的基本参数包括步距角、步距、堵转力矩、保持力矩、步进角度、步进角误差等。
1. 步距角(Step Angle):步进电机一个完整的360度旋转等于一个步距角,通常用度(°)表示。
常见的步距角有1.8度、0.9度、0.72度、0.36度等,其中1.8度最为常用。
2. 步距(Step Size):步进电机一次脉冲信号所驱动的转动角度。
步距角是步距的倒数,即步进建为1/步距角。
3. 堵转力矩(Holding Torque):即步进电机在静止状态下可以承受的最大转矩。
堵转力矩是选择步进电机的一个重要参数,决定了步进电机能否承受负载并保持位置。
4. 保持力矩(Detent Torque):在步进电机没有通电情况下,转轴被阻碍转动的力矩,也称为无动力保持力矩。
5. 步进角度(Step Angle Accuracy):步进电机的每个步进角度是否准确。
通常以百分比形式表示,如±5%。
6. 步进角误差(Step Error):步进电机在空载或负载情况下,转动一定步数后,实际位置与理论应到的位置之间的误差。
步进角误差通常由步进电机制造商提供。
除了上述基本参数外,还有一些其他重要的参数需要考虑,如电流、电阻、电感、电感电阻比等。
7. 额定电流(Rated Current):步进电机额定工作时的电流大小。
额定电流决定了步进电机的输出功率和热量产生量。
8. 电阻(Resistance):步进电机内部的绕组电阻,影响电机的电流敏感性和损耗。
9. 电感(Inductance):步进电机内部的绕组电感,与步进电机的响应速度和转速相关。
10. 电感电阻比(Inductance to Resistance ratio):电感与电阻之间的比值,反映了步进电机的电机特性。
步进电动机的分类

步进电动机的分类
1. 反应式步进电动机知道不?就像一个反应超级迅速的小战士!比如那种快速响应指令的智能小机器人,里面说不定就用了这种电动机呢。
2. 永磁式步进电动机啊,这就好比是一个固执的大力士,有自己的固定力量呢!像一些需要稳定力量输出的设备不就常用它嘛。
3. 混合式步进电动机,哎唷,那可厉害了,就像一个全能选手!很多精密仪器里面不都有它的身影嘛。
4. 单极性步进电动机,就像个只会朝一个方向努力的家伙,虽然有点一根筋,但有些时候还真少不了它呀!你想想那些只需要单向转动的小装置。
5. 双极性步进电动机呀,就如同一个灵活多变的精灵,能在不同方向上自由舞蹈呢!就像那种可以灵活转向的小玩具车。
6. 可变磁阻式步进电动机,这不就是一个会跟着环境变化而改变策略的智者嘛!在一些不断变化的工作场景中,它可有用啦,比如那种会自动调节的小工具。
7. 直线步进电动机,哇哦,那可是能像箭一样直直冲出去的勇士!像一些直线运动的设备可不就靠它嘛。
8. 旋转步进电动机,可不就像是个不知疲倦的小陀螺嘛!那一直在转呀转的,好多需要旋转运动的东西都离不开它呢。
9. 多相步进电动机,就像一个团结协作的团队,众人拾柴火焰高呀!在一些大型的、复杂的机器中常常能看到它们齐心协力的工作呢。
总之,步进电动机的分类可真丰富呀,每一种都有自己独特的魅力和用途,它们让我们的生活变得更加精彩和便捷!。
步进电动机的基本特性

步进电动机的基本特性使用步进电动机时,电动机的特性是否符合使用条件,是相当重要的一点。
在此说明步进电动机使用时的重要特性。
步进电动机的特性可大略分为两项。
•动特性:这是与步进电动机起动或旋转时有关的特性,主要会影响机器的工作、周期时间等。
•静特性:这是与步进电动机停止时角度变化有关的特性,主要会影响机器的精度。
动特性•转速一转矩特性这是表示驱动步进电动机时的转速和转矩的关系,如特性图所示。
是选用步进电动机时所必须考虑的特性。
横轴代表电动机输出轴的转速,而纵轴则代表转矩。
转速一转矩特性取决于电动机及驱动器,因使用的驱动器种类不同会有较大差异。
①最大励磁转矩(TH : Holding Torque)是指步进电动机在通电状态(额定电流)下停止时,本身保有的最大保持转矩(保持力)。
②最大同步转矩(Pullout Torque)各转速所能产生的最大转矩。
选用电动机时,必要转矩必须在本曲线的内侧。
③最大自起动频率(fS)步进电动机的摩擦负载、惯性负载为0时,瞬间(无加减速时间)能起动、停止的最大脉冲频率。
当在超过此脉冲频率的情况下驱动电动机时,应逐渐进行加减速。
随电动机承载的惯性负载增加,此频率亦逐渐降低。
(参考惯性负载一自起动频率特性)最大响应频率(fr)步进电动机的摩擦负载、惯性负载为0时,进行缓慢的加减速时可运行的最大脉冲频率。
下图为代表5相步进电动机组合产品的转速一转矩特性。
・惯性负载一自起动频率特性表示因自起动频率的惯性负载而产生变化的特性。
步进电动机的转子本身或负载,因有转动惯量存在,因此于瞬时起动 或停止时,电动机轴会产生延迟或超过的现象。
此数值会随脉冲频率 而变化,但是若超过某一数值时电动机将无法跟踪脉冲频率,而产生 失步(miss-SteP)现象。
将即将失步前的脉冲频率称为自起动频率。
8S 4 例 01.2 1000 20003000 4000 转速[r∕min]设定电流:1∙4A∕相 外部负载惯性:JI=Okg • m2 步距角度:0727St 叩 I IIIIIIIIIIIII 一AC1OOV 输入-…AC200愉入 0 10 20 30 (分割数 1)脉冲频率[kHz]4— E ∙≡一醉最大同步转矩2500O1 --------------------------------- ---------------------- . ---------------------- 1 --------------------- 1----------------------0 1000 2000 3000 4000 5000惯性负一Jl(XlOT [kg∙m2]) 惯性负载一自起动频率特性相对于惯性负载的最大自起动频率的变化可以根据下列公式算出近似值。
第五章 步进电机

过30°(步距角),每个通电循环周期(3拍)磁场在
空间旋转了360°而转子转过90°(一个齿距角)。
单三拍工作方式特点
三相绕组中每次只有一相通电、一个循环 周期共包括三个脉冲,所以称三相单三拍。 (1)一个电脉冲,转子转过 30
到左图所示位置:1、3齿与A、
A′极对齐。
A
B'
C'
C
B
A'
A
B'
C'
C
B
A'
同理,B相通电时,转子会转过30角,2、4
齿和B、B´ 磁极轴线对齐;当C相通电时,转子 再转过30角,1、3齿和C´、C磁极轴线对齐。
这种工作方式下,三个绕组依次通电一次为 一个循环周期,一个循环周期包括三个工作脉冲, 所以称为三相单三拍工作方式。
• 步距角却因拍数增加1倍而减小到齿距
角的1/6, 即S= 15°。
各种工作方式特点归纳
(1)拍数为N,相数为m 时
若单拍运行,则拍数N=m; 若单双拍运行,则N=2m。 (2)经过一个通电循环,转子转过1个齿。
电机转速():
n 60 f Zr N
从以上对步进电机三种驱动方式的分析可 得步距角计算公式:
θ = ±π 这个位置是不稳定的,两个不稳定点之间的区域构 成静态稳定区。
电磁转矩的最大值称为最大静态转矩Tmax,它表示了步进电动 机承受负载的能力,是步进电动机最主要的性能指标之一。
1) 矩角特性 • 静止时若有外部转矩作用于转轴上,迫使转
子离开初始平衡位置而偏转,转子偏离初始 平衡位置的电角度称为失调角θ • 转子会产生反应转矩,也称静态转矩
步进电机的分类

步进电动机的分类
(1)步进电动机按工作原理不同可分为:
1)激磁式。
电动机定子转子均有绕组,靠电磁力矩使转子转动。
2) 反应式。
转子无绕组,定、转子开小齿,定子绕组励磁后产生反应力矩,使转子转动。
这是目前我国主要发展的类型,已于20世纪70年代末形成完整的系列,有较好的技术性能指标。
3)混合式(即永磁感应子式)。
它与反应式的主要区别是转子上置有磁钢。
反应式电动机转子无磁钢,输放能量全靠定子励磁电流供给,静态电流比永磁式大许多。
永磁感应子式具有驱动电流小、效率高、过载能力强等优点,是一种很有发展前途的步进电动机。
(2)按输出转矩大小可分为:
1) 快速步进电动机。
输出转矩一般为0.07~4N·m。
可控制小型精密机床的工作台(例如线切割机床)。
2)功率步进电动机。
输出转矩一般为5~4N·m。
可直接驱动机床移动部件。
(3)按励磁相数可分为三相、四相、五相、六相等。
相数越多步距角越小,但结构越复杂。
什么是步进电动机-步进电动机和普通电动机的区别

什么是步进电动机?步进电动机和普通电动机的区别步进电机广泛用于数控机床、自动送料机、软盘驱动器的马达、打印机、绘图仪等设备中。
所谓步进电动机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
我们可以通过掌握脉冲的个数来掌握电机的角位移量,从而达到精确定位的目的;同时还可以通过掌握脉冲频率来掌握电动机转动的速度和加速度,从而达到调速的目的。
目前,比较常用的步进电动机包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)和单相式步进电动机等。
步进电动机和一般电动机的区分主要就在于其脉冲驱动的形式,正是这个特点,步进电动机可以和现代的数字掌握技术相结合。
但步进电动机在掌握精度、速度变化范围、低速性能方面都不如传统闭环掌握的直流伺服电动机;所以主要应用在精度要求不是特殊高的场合。
由于步进电动机具有结构简洁、牢靠性高和成本低的特点,所以步进电动机广泛应用在生产实践的各个领域;尤其是在数控机床制造领域,由于步进电动机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以始终被认为是最抱负的数控机床执行元件。
此外,步进电动机也存在很多缺陷;由于步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于肯定速度时就无法启动,并伴有尖锐的啸叫声;不同厂家的细分驱动器精度可能差别很大,细分数越大精度越难掌握;并且,步进电机低速转动时有较大的振动和噪声。
虽然步进电机已被广泛地应用,但步进电机并不能象一般的直流电机,沟通电机在常规下使用。
它必需由双环形脉冲信号、功率驱动电路等组成掌握系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等很多专业学问。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却特别少,大部分的厂家只一、二十人,连最基本的设备都没有。
步进电动机
Tf
L R'
频率越高,绕组中的平均电 流越小,电机所产生的平均 转矩大大下降,负载能力也 就大大下降了。
附加旋转电势的影响
电机铁心中的涡流损耗
二、静稳定区和动稳定区
通电时,转子每旋转一步最后停留的位置必须在动稳定区 内,即:静、动稳定区必须有所重叠,且从稳定性的角度来看,
重叠区间越大越好,这样,下一步就可继续沿着原来的旋转方
定子
转子
转子 θe
e
2
T正最大
静态转矩
定子
e
2
T负最大
定子
T
T
转子 θe θe
转子
矩角特性
步进电机产生的静态转矩T随失调角θe的变化规律
近似
T f e T j max sin e
Tjmax 稳定平衡点 /2
/2 静稳定区
θ
e
步进电动机的工作过程就是实现失调角为零的过程。
11.5 步进电动机的连续脉冲运行和动特性
连续转动状态 随着脉冲频率 f 的增高,电机转子还未稳定下来时,下一个 脉冲已经到来。 工业应用对步进电机的要求 不丢步/不越步 转子运动平稳 快速性
一、运行矩频特性 步进电机连续转动时的最大输出转矩T与驱动电源脉冲频率f间的关系
定子绕组电感的影响
L Tr R
11.4 步进电动机的单步运行状态
单步运行状态
仅改变一次通电状态或输入脉冲频率非常低
空载
加载
a
Tq
极限负载 or 极限启动转矩 电机以一定通电方式运行时,相邻矩角特性的交点所对应的转矩
3 Tq T j max 2
A
AB
B
步进电机型号、参数、选择

一、步进电动机简介
1. 步进电动机的历史 2. 步进电动机的定义
3. 4. 5. 6. 7.
步进电动机的工作原理 步进电动机的机座号 步进电动机构造 步进电动机主要参数 步进电动机的特点
一、步进电动机简介
1. 步进电动机的历史:德国百格拉公司于1973年发明了五相混 合式步进电机及其驱动器;1993年又推出了性能更加优越的三相 混合式步进电机。我国在80年代以前,一直是反应式步进电机占 统治地位,混合式步进电机是80年代后期才开始发展。 2. 步进电动机的定义:是一种专门用于速度和位置精确控制的 特种电机,它旋转是以固定的角度(称为步距角)一步一步运行 的,故称步进电机。 3. 步进电动机的工作原理 以单极性电机为例来解释 工作原理
4. 步进电动机的机座号:主要有35、39、42、57、86、110等 5. 步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠 轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相 混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿; 三相电机的定子有9个大齿,45个小齿,转子有50个小齿。
2. 电机定位精度的选择
机械传动比确定后,可根据控制系统的定位精度选择步进电机 的步距角及驱动器的细分等级。一般选电机的一个步距角对应 于系统定位精度的1/2 或更小。 注意:当细分等级大于1/4后,步距角的精度不能保证。 伺服电机编码器的分辨率选择:分辨率要比定位精度高一个数量 级。
3. 电机力矩选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静 力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯 性负载和摩擦负载二种。直接起动时(一般由低速)时二种负 载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要 考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好, 静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) • 转动惯量计算
步进电机伺服电机
7.3.1 认知步进电机及驱动器1、步进电动机简介步进电动机是将电脉冲信号转换为相应的角位移或直线位移的一种特殊执行电动机。
每输入一个电脉冲信号,电机就转动一个角度,它的运动形式是步进式的,所以称为步进电动机。
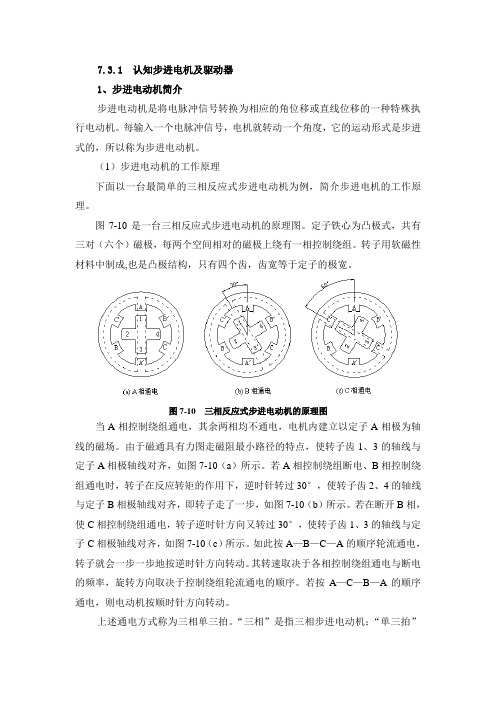
(1)步进电动机的工作原理下面以一台最简单的三相反应式步进电动机为例,简介步进电机的工作原理。
图7-10是一台三相反应式步进电动机的原理图。
定子铁心为凸极式,共有三对(六个)磁极,每两个空间相对的磁极上绕有一相控制绕组。
转子用软磁性材料中制成,也是凸极结构,只有四个齿,齿宽等于定子的极宽。
图7-10 三相反应式步进电动机的原理图当A相控制绕组通电,其余两相均不通电,电机内建立以定子A相极为轴线的磁场。
由于磁通具有力图走磁阻最小路径的特点,使转子齿1、3的轴线与定子A相极轴线对齐,如图7-10(a)所示。
若A相控制绕组断电、B相控制绕组通电时,转子在反应转矩的作用下,逆时针转过30°,使转子齿2、4的轴线与定子B相极轴线对齐,即转子走了一步,如图7-10(b)所示。
若在断开B相,使C相控制绕组通电,转子逆时针方向又转过30°,使转子齿1、3的轴线与定子C相极轴线对齐,如图7-10(c)所示。
如此按A—B—C—A的顺序轮流通电,转子就会一步一步地按逆时针方向转动。
其转速取决于各相控制绕组通电与断电的频率,旋转方向取决于控制绕组轮流通电的顺序。
若按A—C—B—A的顺序通电,则电动机按顺时针方向转动。
上述通电方式称为三相单三拍。
“三相”是指三相步进电动机;“单三拍”是指每次只有一相控制绕组通电;控制绕组每改变一次通电状态称为一拍,“三拍”是指改变三次通电状态为一个循环。
把每一拍转子转过的角度称为步距角。
三相单三拍运行时,步距角为30°。
显然,这个角度太大,不能付诸实用。
如果把控制绕组的通电方式改为A→AB→B→BC→C→CA→A,即一相通电接着二相通电间隔地轮流进行,完成一个循环需要经过六次改变通电状态,称为三相单、双六拍通电方式。
步进电机组成及工作原理

步进电机组成及工作原理一、步进电机的组成步进电机是一种组合式电机,它由转子、定子、感应器和控制器等几个部分组成。
1. 转子步进电机的转子通常由一些磁性材料制成,如镍、铁、钴、钢等。
转子的形状通常为圆盘形,中央有一个或多个隆起的齿形结构。
2. 定子步进电机的定子通常也由磁性材料制成,有时会添加一些绝缘材料。
定子的形状通常为环形,有一个或多个钳制定子的爪子。
定子的内部有一些线圈,并联或串联,它们与控制器相连。
3. 感应器步进电机的感应器通常是一些磁性部件,如霍尔元件、磁敏电阻等。
它们的作用是检测转子位置,向控制器反馈转子位置信息。
4. 控制器步进电机的控制器通常是一个设备,它能产生特定的电流/电压波形,驱动步进电机转动。
控制器通常由处理器、驱动电路、信号输入输出接口等几个部分组成。
二、步进电机的工作原理步进电机的工作原理是利用交替磁场和磁学相互作用产生转矩,推动转子转动。
步进电机的驱动方式有两种:全步进驱动和半步进驱动。
1.全步进驱动全步进驱动又称全步进模式,是最常用的步进电机驱动方式。
在全步进模式下,控制器将电流以一定周期分为多个步骤,每一步骤控制电流的大小和方向,产生一定的磁场,推动转子转动。
具体而言,当控制器中的电流向步进电机内部线圈流动时,就会产生一个磁场。
如果电流反向,就会产生另一个磁场。
这两种磁场会相互作用,生成一个转矩,推动转子转动。
在全步进模式下,每一步转动角度是固定的(通常为1.8度或0.9度),因此转子转动也是连续的,不会出现跳动现象。
2.半步进驱动半步进驱动是在全步进模式基础上改进得到的,也称为半步进模式。
在半步进模式下,控制器将电流分为两个步骤,第一步只控制一个电流线圈,第二步则控制两个电流线圈。
这样一来,转子转动角度就可以设置为1.8度的一半(即0.9度)。
半步进驱动可以提高步进电机的分辨率,使得步进电机更加精确。
但同时也会使得驱动电路更加复杂,成本更高。
步进电机是一种精密的电动机,具有结构简单、定位精度高等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Stepper motorConvert electrical pulse signal into angular displacement of the stepping motor to control the micro &special motor rotors. As actuators in the automatic control device. For each pulse signal input, further before stepping motors, also known as the pulse motor. Stepper motor used in digital computer peripheral equipment, as well as the printer, plotter, and disk device.Stepper motor is the electrical pulse signal into angular displacement or line open loop control elements of displacement. In the case of the overload, motor speed, stop position depends only on the pulse signal frequency and pulse number, and not affected by load change, which give the motor a pulse signal, a step from the Angle of motor is turning. This line sexual relations, and the error of the stepper motor only periodic without cumulative error, etc. Made in the field of speed and position control with stepper motor to control becomes very simple. Although the stepper motor has been widely used, but stepping motor does not like ordinary dc motor, ac motor under normal use. It must be driven by double annular pulse signal and power circuit of control system can use. So good with step motor is not easy, it involves the mechanical, electrical, electronic and computer and many other professional knowledge. Today, the manufacturer of stepper motor is indeed many, but has the professional and technical personnel, can be developed, developed at the factory are very few, most manufacturers only a, 20 people, even the most basic equipment. Only in a stage of blind imitation. This gives households in product selection, use lots of trouble.Stepping motor driving power source by frequency pulse signal generator, pulse distributor and pulse amplifier, thus provide pulse current drive power supply to the motor windings. The performance of the stepper motor depends on the good cooperation between the motor and drive power supply.Stepper motor is no cumulative error, the advantages of simple structure, convenient operation and maintenance, low manufacturing cost, the ability of stepper motor to drive the load inertia is big, suitable for small and medium-sized machine speed and accuracy is not high, defect is low efficiency, fever, sometimes out of step. Stepper motor is widely used in the digital control system, such as d/a conversion device, numerical control machine tools, computer peripherals, recorder, clocks, such as in the industrial automation production lines, printing equipment, etc are used.Stepper motor is divided into electromechanical, magnetoelectric and linear three basic types.Electromechanical stepper motor consists of core, coil, gear mechanism, etc. Will produce magnetic solenoid coil electricity, promote its core panels, through a rotary Angle of the output shaft gear mechanism, rotating the gear 天行健,自强不息;地势坤,厚德载物。
1/5to keep the output axis of resistance in the new job position; Again electrify coil, a rotary Angle of rotation and, in turn to step into the work. Magnetoelectric stepper motor, its simple structure, high reliability, low price and wide application. Mainly include permanent magnet, the magnetic resistance type and hybrid.Permanent magnet stepper motor rotor magnetic pole of permanent magnet, polarity alternating magnetic field in air gap, the stator is composed of four phase winding. When A phase winding current, will shift to the phase winding rotor magnetic field direction of the identified. When A blackout, B phase winding is electricity field, produce A new magnetic field direction, at this point, the rotor is rotating Angle and is located in A new direction of the magnetic field, is determined by the order of excitation in the rotor rotation direction. If the change of the stator excitation too fast, the rotor will not consistent with the change of the stator magnetic field direction, the rotor is out of step. Start frequency and low frequency, and it is a disadvantage of the permanent magnet stepper motor. But permanent magnet stepper motor smaller power consumption, high efficiency. Appeared in the early 1980 s, the rotor is a permanent magnet disc disc stepper motor, the interval Angle and working frequency of magnetic resistance type stepping motor.Magnetic resistance of the stepper motor, the rotor iron core of the internal and external surface is equipped with distribution according to certain rule similar tooth groove, using the groove, the rotor iron core causes the change of the magnetic circuit magnetic resistance, the relative position to produce torque. The rotor iron core made of silicon steel sheet or soft magnetic materials, when one of the stator is excitation, the rotor will go to make the position of the magnetic circuit reluctance minimum. When another phase excitation, the rotor to another location, hours and magnetic circuit magnetic resistance for most motor will stop running. At this time, the rotor turns a step away from the Angle of theta b, namely type of N as the rotor turns a pitch run number; ZR for rotor teeth.Magnetic resistance type stepping motor structure form is more. Stator core has a single conductor, multiple stages; Has the radial, axial magnetic circuit; Winding phase number of three-phase, four, five. Magnetic resistance type stepper motor step Angle can do 1 ° ~ 15 °, and even smaller, easy to guarantee accuracy, starting and running frequency is higher, but large power consumption and low efficiency.Hybrid stepping motor, and its set, the structure of the rotor iron core and magnetic resistance type stepping motor is similar. With permanent magnet rotor single polarity in the air gap magnetic field, the magnetic field was also on the rotor alveolar modulation soft magnetic materials.Hybrid stepping motor and permanent magnet stepping motor with the 天行健,自强不息;地势坤,厚德载物。