ANSYS中文翻译官方手册_接触分析
ansys中英文对照
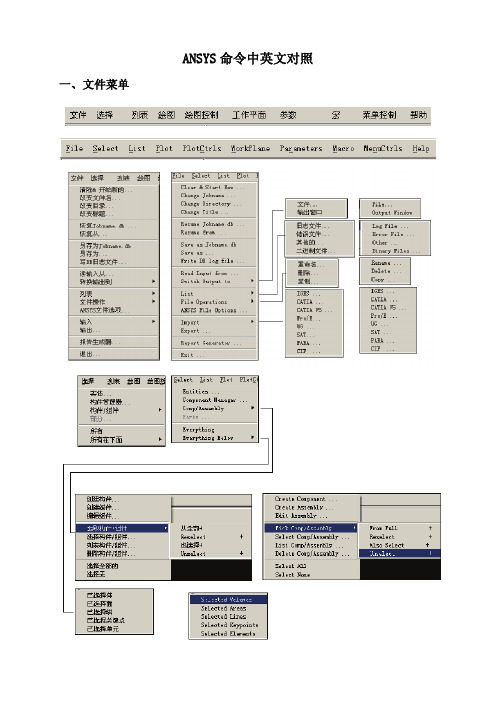
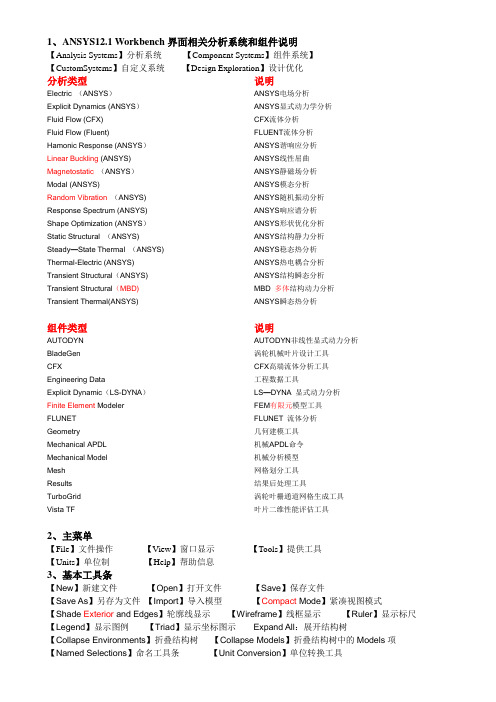
ANSYS命令中英文对照 一、文件菜单二、工具栏三、主菜单1、一级菜单2、二级菜单3、三级菜单4、四级菜单5、五级菜单1、ANSYS12.1 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS) ANSYS电场分析Explicit Dynamics (ANSYS) ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS) ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS) ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS) ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady-State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD) MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA)LS-DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model 机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示【Expand All】展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳: 【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
ANSYS接触分析(中文)

接触问题(参考ANSYS的中文帮助文件)当两个分离的表面互相碰触并共切时,就称它们牌接触状态。
在一般的物理意义中,牌接触状态的表面有下列特点:1、不互相渗透;2、能够互相传递法向压力和切向摩擦力;3、通常不传递法向拉力。
接触分类:刚性体-柔性体、柔性体-柔性体实际接触体相互不穿透,因此,程序必须在这两个面间建立一种关系,防止它们在有限元分析中相互穿过。
――罚函数法。
接触刚度――lagrange乘子法,增加一个附加自由度(接触压力),来满足不穿透条件――将罚函数法和lagrange乘子法结合起来,称之为增广lagrange法。
三种接触单元:节点对节点、节点对面、面对面。
接触单元的实常数和单元选项设置:FKN:法向接触刚度。
这个值应该足够大,使接触穿透量小;同时也应该足够小,使问题没有病态矩阵。
FKN值通常在0.1~10之间,对于体积变形问题,用值1.0(默认),对弯曲问题,用值0.1。
FTOLN:最大穿透容差。
穿透超过此值将尝试新的迭代。
这是一个与接触单元下面的实体单元深度(h)相乘的比例系数,缺省为0.1。
此值太小,会引起收敛困难。
ICONT:初始接触调整带。
它能用于围绕目标面给出一个“调整带”,调整带内任何接触点都被移到目标面上;如果不给出ICONT 值,ANSYS根据模型的大小提供一个较小的默认值(<0.03=PINB:指定近区域接触范围(球形区)。
当目标单元进入pinball区时,认为它处于近区域接触,pinball区是围绕接触单元接触检测点的圆(二维)或球(三维)。
可以用实常数PINB调整球形区(此方法用于初始穿透大的问题是必要的)PMIN和PMAX:初始容许穿透容差。
这两个参数指定初始穿透范围,ANSYS把整个目标面(连同变形体)移到到由PMIN和PMAX指定的穿透范围内,而使其成为闭合接触的初始状态。
初始调整是一个迭代过程,ANSYS最多使用20个迭代步把目标面调整到PMIN和PMAX范围内,如果无法完成,给出警告,可能需要修改几何模型。
ansys-中文帮助手册(含目录-word版本)

ansys-中文帮助手册(含目录-word版本)目录第1 章开始使用ANSYS 11.1 完成典型的ANSYS 分析 1 1.2 建立模型 1第2 章加载232.1 载荷概述23 2.2 什么是载荷23 2.3 载荷步、子步和平衡迭代24 2.4 跟踪中时间的作用25 2.5 阶跃载荷与坡道载荷26 2.6 如何加载27 2.7 如何指定载荷步选项68 2.8 创建多载荷步文件77 2.9 定义接头固定处预拉伸78第3 章求解853.1 什么是求解84 3.2 选择求解器84 3.3 使用波前求解器85 3.4 使用稀疏阵直接解法求解器86 3.5 使用雅可比共轭梯度法求解器(JCG)86 3.6 使用不完全乔列斯基共轭梯度法求解器(ICCG)86 3.7 使用预条件共轭梯度法求解器(PCG)86 3.8 使用代数多栅求解器(AMG)87 3.9 使用分布式求解器(DDS)88 3.10 自动迭代(快速)求解器选项88 3.11 在某些类型结构分析使用特殊求解控制89 3.12 使用PGR 文件存储后处理数据92 3.13 获得解答96 3.14 求解多载荷步97 3.15 中断正在运行的作业100 3.16 重新启动一个分析100 3.17 实施部分求解步111 3.18 估计运行时间和文件大小1133.19 奇异解114第4 章后处理概述1164.1 什么是后处理116 4.2 结果文件117 4.3 后处理可用的数据类型117第5 章通用后处理器(POST1) 1185.1 概述118 5.2 将数据结果读入数据库118 5.3 在POST1 中观察结果127 5.4 在POST1 中使用PGR 文件152 5.5 POST1 的其他后处理内容160第6 章时间历程后处理器(POST26)1746.1 时间历程变量观察器174 6.2 进入时间历程处理器176 6.3 定义变量177 6.4 处理变量并进行计算179 6.5 数据的输入181 6.6 数据的输出183 6.7 变量的评价184 6.8 POST26 后处理器的其它功能187 第7 章选择和组件190 7.1 什么是选择190 7.2 选择实体190 7.3 为有意义的后处理选择194 7.4 将几何项目组集成部件与组件195 第8 章图形使用入门1988.1 概述198 8.2 交互式图形与“外部”图形198 8.3 标识图形设备名(UNIX 系统)198 8.4 指定图形显示设备的类型(WINDOWS 系统)2018.5 与系统相关的图形信息202 8.6 产生图形显示205 8.7 多重绘图技术207第9 章通用图形规范2109.1 概述210 9.2 用GUI 控制显示210 9.3 多个ANSYS 窗口,叠加显示210 9.4 改变观察角、缩放及平移211 9.5 控制各种文本和符号214 9.6 图形规范杂项217 9.7 3D 输入设备支持218第10 章增强型图形21910.1 图形显示的两种方法219 10.2P OWER G RAPHICS 的特性219 10.3何时用P OWER G RAPHICS219 10.4激活和关闭P OWER G RAPHICS220 10.5怎样使用P OWER G RAPHICS220 10.6希望从P OWER G RAPHICS 绘图中做什么220第11 章创建几何显示22311.1 用GUI 显示几何体223 11.2 创建实体模型实体的显示223 11.3 改变几何显示的说明224第12 章创建几何模型结果显示23312.1 利用GUI 来显示几何模型结果233 12.2 创建结果的几何显示233 12.3 改变POST1 结果显示规范235 12.4 Q-S LICE 技术238 12.5 等值面技术238 12.6 控制粒子流或带电粒子的轨迹显示239第13 章生成图形24013.1 使用GUI 生成及控制图240 13.2 图形显示动作240 13.3 改变图形显示指定241第14章注释24514.1 注释概述245 14.2 二维注释245 14.3 为ANSYS 模型生成注释246 14.4 三维注释246 14.5 三维查询注释247第15 章动画24815.1 动画概述248 15.2 在ANSYS 中生成动画显示248 15.3 使用基本的动画命令248 15.4 使用单步动画宏249 15.5 离线捕捉动画显示图形序列249 15.6 独立的动画程序250 15.7 WINDOWS 环境中的动画251第16 章外部图形25316.1 外部图形概述253 16.2 生成中性图形文件254 16.3 DISPLAY 程序观察及转换中性图形文件255 16.4 获得硬拷贝图形258 第17 章报告生成器25917.1 启动报告生成器259 17.2 抓取图象260 17.3 捕捉动画260 17.4 获得数据表格261 17.5 获取列表264 17.6 生成报告26417.7 报告生成器的默认设置267 第18 章 CMAP 程序26918.1 CMAP 概述269 18.2 作为独立程序启动CMAP269 18.3 在ANSYS 内部使用CMAP271 18.4 用户化彩色图271第19 章文件和文件管理27419.1 文件管理概述274 19.2 更改缺省文件名274 19.3 将输出送到屏幕、文件或屏幕及文件275 19.4 文本文件及二进制文件275 19.5 将自己的文件读入ANSYS 程序278 19.6 在ANSYS 程序中写自己的ANSYS 文件279 19.7 分配不同的文件名280 19.8 观察二进制文件内容(AXU2)280 19.9 在结果文件上的操作(AUX3)280 19.10 其它文件管理命令280第20 章内存管理与配置28220.1 内存管理282 20.2 基本概念282 20.3 怎样及何时进行内存管理283 20.4 配置文件286第1 章开始使用ANSYS1.1 完成典型的ANSYS 分析ANSYS 软件具有多种有限元分析的能力,包括从简单线性静态分析到复杂的非线性瞬态动力学分析。
ANSYS中文翻译官方高级手册_adv1

C. 参数化提取结果
在本步中,提取结果并赋值给相应的参数。这些参数一般为状态变量和目
标函数。提取数据的操作用*GET 命令(Utility Menu>Parameters>Get Scalar Data)
实现。通常用 POST1 来完成本步操作,特别是涉及到数据的存储,加减或其他
操作。
在梁的例题中,梁的总重量是目标函数。因为重量与体积成比例(假定密
优化设计通常包括以下几个步骤,这些步骤根据用户所选用优化方法的不 同(批处理 GUI 方式)而有细微的差别。
1-2
ANSYS 高级技术分析指南
图 1-2 优化数据流向
优化设计
1. 生成循环所用的分析文件。该文件必须包括整个分析的过程,而且 必须满足以下条件:
a. 参数化建立模型(PREP7)。 b. 求解(SOLUTION)。 c. 提取并指定状态变量和目标函数(POST1/POST26)。 2. 在 ANSYS 数据库里建立与分析文件中变量相对应的参数。这一步
状态变量和目标函数时使用这些操作,应该用可以参数化的操作来代替。
B. 求解
求解器用于定义分析类型和分析选项,施加载荷,指定载荷步,完成有限
元计算。分析中所用到的数据都要指出:凝聚法分析中的主自由度,非线性分析
中的收敛准则,谐波分析中的频率范围等。载荷和边界条件也可以作为设计变量。
梁的例子中,SOLUTION 部分的输入大致如下:
例子中,设计变量是 B(梁的宽度)和 H(梁的高度),因此单元的实参是由 B
和 H 来表示的:
…
/PREP7
!初始化设计变量:
B=2.0
H=3.0
!
ET,1,BEAM3
!2-D 梁单元
Ansys接触分析

Ansys接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体-柔体的接触,和柔体-柔体的接触,在刚体-柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体-柔体的接触,许多金属成形问题归为此类接触,另一类,柔体-柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点-点,点-面,和面-面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSYS使用的接触单元和使用它们的过程,下面分类详述。
点-点接触单元点-点接触单元主要用于模拟点-点的接触行为,为了使用点-点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点-点的接触单元来求解面-面的接触问题,过盈装配问题是一个用点-点的接触单元来模拟面-面的接触问题的典型例子。
完整版ansys 中文帮助手册----内容与目录

目录第1 章开始使用ANSYS 11.1 完成典型的ANSYS 分析 1 1.2 建立模型 1第2 章加载232.1 载荷概述23 2.2 什么是载荷23 2.3 载荷步、子步和平衡迭代24 2.4 跟踪中时间的作用25 2.5 阶跃载荷与坡道载荷26 2.6 如何加载27 2.7 如何指定载荷步选项68 2.8 创建多载荷步文件77 2.9 定义接头固定处预拉伸78第3 章求解853.1 什么是求解84 3.2 选择求解器84 3.3 使用波前求解器85 3.4 使用稀疏阵直接解法求解器86 3.5 使用雅可比共轭梯度法求解器(JCG)86 3.6 使用不完全乔列斯基共轭梯度法求解器(ICCG)86 3.7 使用预条件共轭梯度法求解器(PCG)86 3.8 使用代数多栅求解器(AMG)87 3.9 使用分布式求解器(DDS)88 3.10 自动迭代(快速)求解器选项88 3.11 在某些类型结构分析使用特殊求解控制89 3.12 使用PGR 文件存储后处理数据92 3.13 获得解答96 3.14 求解多载荷步97 3.15 中断正在运行的作业100 3.16 重新启动一个分析100 3.17 实施部分求解步111 3.18 估计运行时间和文件大小1133.19 奇异解114第4 章后处理概述1164.1 什么是后处理116 4.2 结果文件117 4.3 后处理可用的数据类型117第5 章通用后处理器(POST1) 1185.1 概述118 5.2 将数据结果读入数据库118 5.3 在POST1 中观察结果127 5.4 在POST1 中使用PGR 文件152 5.5 POST1 的其他后处理内容160第6 章时间历程后处理器(POST26)1746.1 时间历程变量观察器174 6.2 进入时间历程处理器176 6.3 定义变量177 6.4 处理变量并进行计算179 6.5 数据的输入181 6.6 数据的输出183 6.7 变量的评价184 6.8 POST26 后处理器的其它功能187第7 章选择和组件190 7.1 什么是选择190 7.2 选择实体190 7.3 为有意义的后处理选择194 7.4 将几何项目组集成部件与组件195第8 章图形使用入门1988.1 概述198 8.2 交互式图形与“外部”图形198 8.3 标识图形设备名(UNIX 系统)198 8.4 指定图形显示设备的类型(WINDOWS 系统)2018.5 与系统相关的图形信息202 8.6 产生图形显示205 8.7 多重绘图技术207第9 章通用图形规范2109.1 概述210 9.2 用GUI 控制显示210 9.3 多个ANSYS 窗口,叠加显示210 9.4 改变观察角、缩放及平移211 9.5 控制各种文本和符号214 9.6 图形规范杂项217 9.7 3D 输入设备支持218第10 章增强型图形21910.1 图形显示的两种方法219 10.2P OWER G RAPHICS 的特性219 10.3何时用P OWER G RAPHICS219 10.4激活和关闭P OWER G RAPHICS220 10.5怎样使用P OWER G RAPHICS220 10.6希望从P OWER G RAPHICS 绘图中做什么220第11 章创建几何显示22311.1 用GUI 显示几何体223 11.2 创建实体模型实体的显示223 11.3 改变几何显示的说明224第12 章创建几何模型结果显示23312.1 利用GUI 来显示几何模型结果233 12.2 创建结果的几何显示233 12.3 改变POST1 结果显示规范235 12.4 Q-S LICE 技术238 12.5 等值面技术238 12.6 控制粒子流或带电粒子的轨迹显示239第13 章生成图形24013.1 使用GUI 生成及控制图240 13.2 图形显示动作240 13.3 改变图形显示指定241第14章注释24514.1 注释概述245 14.2 二维注释245 14.3 为ANSYS 模型生成注释246 14.4 三维注释246 14.5 三维查询注释247第15 章动画24815.1 动画概述248 15.2 在ANSYS 中生成动画显示248 15.3 使用基本的动画命令248 15.4 使用单步动画宏249 15.5 离线捕捉动画显示图形序列249 15.6 独立的动画程序250 15.7 WINDOWS 环境中的动画251第16 章外部图形25316.1 外部图形概述253 16.2 生成中性图形文件254 16.3 DISPLAY 程序观察及转换中性图形文件255 16.4 获得硬拷贝图形258第17 章报告生成器25917.1 启动报告生成器259 17.2 抓取图象260 17.3 捕捉动画260 17.4 获得数据表格261 17.5 获取列表264 17.6 生成报告26417.7 报告生成器的默认设置267 第18 章 CMAP 程序26918.1 CMAP 概述269 18.2 作为独立程序启动CMAP269 18.3 在ANSYS 内部使用CMAP271 18.4 用户化彩色图271第19 章文件和文件管理27419.1 文件管理概述274 19.2 更改缺省文件名274 19.3 将输出送到屏幕、文件或屏幕及文件275 19.4 文本文件及二进制文件275 19.5 将自己的文件读入ANSYS 程序278 19.6 在ANSYS 程序中写自己的ANSYS 文件279 19.7 分配不同的文件名280 19.8 观察二进制文件内容(AXU2)280 19.9 在结果文件上的操作(AUX3)280 19.10 其它文件管理命令280第20 章内存管理与配置28220.1 内存管理282 20.2 基本概念282 20.3 怎样及何时进行内存管理283 20.4 配置文件286第1 章开始使用ANSYS1.1 完成典型的ANSYS 分析ANSYS 软件具有多种有限元分析的能力,包括从简单线性静态分析到复杂的非线性瞬态动力学分析。
ansys Workbench;菜单选项中英文对照
1、ANSYS12.1 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统】【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS)ANSYS电场分析Explicit Dynamics (ANSYS)ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS)ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS)ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS)ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady—State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD)MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA)LS—DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model 机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示Expand All:展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳:【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面: 所选面将从体中删除。
ANSYS接触实例分析参考
ANSYS接触实例分析参考ANSYS是工程仿真领域广泛使用的一种有限元分析软件。
在实际工程中,接触问题经常出现,例如机械装配中的接触、摩擦、磨损等现象需要进行分析和优化。
本文将介绍几个ANSYS接触实例,并分析其分析方法和结果。
第一个实例是机械装配中的接触分析。
假设有一个由两个金属块组成的简单装配,要分析它们之间的接触情况。
首先需要建立两个金属块的几何模型,并进行网格划分。
然后,使用ANSYS中的接触分析模块,设置接触类型、接触参数和材料特性等。
接着,施加相应的边界条件和载荷条件,运行分析并获取接触压力和接触面积等结果。
最后,根据结果对接触情况进行评估和优化。
第二个实例是摩擦接触问题的分析。
假设有一个由摩擦带和基体组成的摩擦副,需要分析摩擦力和热量的分布。
首先需要建立摩擦带和基体的几何模型,并进行网格划分。
然后,使用ANSYS中的摩擦接触分析模块,设置摩擦带和基体的材料特性、摩擦系数和接触压力等参数。
接着,施加相应的边界条件和载荷条件,运行分析并获取摩擦力、摩擦热量和温度分布等结果。
最后,根据结果对摩擦副的性能进行评估和优化。
第三个实例是磨损接触问题的分析。
假设有一个由金属零件和砂轮组成的磨削装置,需要分析金属零件表面的磨损情况。
首先需要建立金属零件和砂轮的几何模型,并进行网格划分。
然后,使用ANSYS中的磨损接触分析模块,设置金属零件和砂轮的材料特性、初始接触压力和磨粒等参数。
接着,施加相应的边界条件和载荷条件,运行分析并获取磨损量、磨损深度和磨损形貌等结果。
最后,根据结果对磨削装置进行评估和优化。
以上三个实例只是ANSYS接触分析的一小部分应用,接触分析的对象和问题种类都非常多样。
在实际工程中,可以根据具体问题的特点选择不同的接触分析方法和技术,以获取更准确和可靠的结果。
同时,还可以通过对接触问题的分析和优化,改善产品的性能和可靠性,提高工程效率和经济效益。
总结起来,ANSYS接触实例分析主要包括机械装配中的接触分析、摩擦接触问题的分析和磨损接触问题的分析。
ansysworkbench菜单选项中英文对照翻译
ansys Workbench;菜单选项中英文对照1、 Workbench 界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统】【CustomSystems 】自定义系统【Design Exploration】设计优化分析类型Electric (ANSYS)Explicit Dynamics (ANSYS)Fluid Flow (CFX)Fluid Flow (Fluent)Hamonic Response (ANSYS)Linear Buckling (ANSYS)Magnetostatic (ANSYS)Modal (ANSYS)Random Vibration (ANSYS)Response Spectrum (ANSYS)Shape Optimization (ANSYS)Static Structural (ANSYS)Steady-State Thermal (ANSYS)Thermal-Electric (ANSYS)Transient Structural(ANSYS)Transient Structural(MBD)Transient Thermal(ANSYS)说明ANSYS 电场分析 ANSYS 显式动力学分析 CFX 流体分析 FLUENT 流体分析ANSYS 谐响应分析 ANSYS 线性屈曲 ANSYS 静磁场分析 ANSYS 模态分析 ANSYS 随机振动分析 ANSYS 响应谱分析 ANSYS 形状优化分析 ANSYS 结构静力分析ANSYS 稳态热分析 ANSYS 热电耦合分析 ANSYS 结构瞬态分析 MBD 多体结构动力分析 ANSYS 瞬态热分析组件类型AUTODYNBladeGenCFXEngineering DataExplicit Dynamic(LS-DYNA )Finite Element ModelerFLUNETGeometryMechanical APDLMechanical ModelMeshResultsTurboGridVista TF说明AUTODYN 非线性显式动力分析涡轮机械叶片设计工具 CFX 高端流体分析工具工程数据工具 LS-DYNA显式动力分析 FEM 有限元模型工具FLUNET流体分析几何建模工具机械APDL 命令机械分析模型网格划分工具结果后处理工具涡轮叶栅通道网格生成工具叶片二维性能评估工具2、主菜单【File 】文件操作【V iew 】窗口显示【Tools 】提供工具【Units 】单位制【Help 】帮助信息3、基本工具条【New 】新建文件【Open 】打开文件【Save 】保存文件【Save As】另存为文件【Import 】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe 】线框显示【Ruler 】显示标尺【Legend 】显示图例【Triad 】显示坐标图示 Expand All:展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models 项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages :Messages 】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry 】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics 】图形窗口:显示当前模型状态【Extrude 】拉伸【Revolve 】旋转【Sweep 】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳:【Thin 】创建薄壁实体【Surface 】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
ansys 接触分析详解
ansys 接触分析详解ansys是一种广泛使用的有限元分析软件,可用于许多工程领域,包括接触问题的解决。
接触分析是模拟不同组件之间的接触和相互作用的过程,包括机械接触问题、磨损问题和摩擦问题等。
在这篇文章中,我们将深入探讨ansys接触分析的基础知识和应用。
首先,ansys的接触分析功能主要是基于两个主要的接触算法:拉格朗日法和欧拉法。
拉格朗日法是一种基于位移的方法,它根据接触点的相对位移计算接触力,并将其应用于固体上。
欧拉法是一种基于速度的方法,它通过基于刚体动力学计算接触力。
两种方法各有优缺点,应根据具体问题选择合适的方法。
接下来,我们将介绍ansys中用于接触分析的工具和技术:1. 接触配对:在模拟接触问题时,需要对参与接触的两个组件进行配对。
ansys可以自动完成这个过程,并且用户可以通过手动指定匹配方式来进行更精确的模拟。
2. 接触条件:ansys支持多种接触条件,包括无摩擦、粘滞、线性弹簧和非线性弹簧。
用户可以根据实际情况选择合适的接触条件,并根据需要进行调整。
3. 接触分析类型:ansys支持两种接触分析类型:静态接触分析和动态接触分析。
静态接触分析用于研究静止状态下的接触问题,而动态接触分析用于模拟动态接触问题,例如冲击和振动。
4. 接触网格:接触分析需要对网格进行紧密的划分,以准确地表示接触面的几何形状。
为此,ansys提供了多种接触网格工具,包括自动网格划分、手动网格划分和基于接触表面的划分。
用户可以根据需要使用这些工具。
5. 接触后处理:完成接触分析后,还需要进行结果的后处理。
ansys提供了多种接触后处理工具,例如接触力分布图、接触区域和应力分布。
用户可以使用这些工具对结果进行深入的分析。
最后,ansys接触分析的应用范围非常广泛,例如机械工程、航空航天、汽车、船舶、建筑和医疗设备等领域。
ansys的接触分析功能可以帮助工程师准确地模拟接触问题,并提供精确的结果,从而帮助他们做出更好的决策和设计。
ANSYS Mechanical 接触分析
基本概念
接触是状态改变 非线性。也就是说, 系统的刚度依赖于接触状态:
状态 = 开
状态 = 闭合和粘结
状态= 闭合和滑动
基本概念
接触是强非线性,因为随着接触状态的改变,接触表面的法向和切 向刚度都有显著的变化。 刚度方面大的突变通常会导致严重的收敛困难。
开接触
闭接触
F
u
基本概念
使接触分析复杂化的因素包括:
基本概念
接触分类
接触问题通常分为两类:
刚性体 -柔性体 和柔性体 -柔性体
刚性体 - 柔性体
一个或更多的接触表面看作刚性体(一个表面与其它表面相比, 刚度显 然要大得多),许多金属成形问题可归为此类。 不计算刚性体内的应力
柔性体 - 柔性体
两个或所有的接触体都可变形(所有表面的刚度相近),螺栓结合凸缘连 接就是柔性体 - 柔性体接触的例子。
接触刚度例子
对Normal Stiffness factors 为0.10, 1.0, 和10.0重复以上分析.
将接触算法 改为 Normal Lagrange进行进一步对比.
接触刚度例子
结论
刚度增加, 渗透减少,而最大压力增加,并且通常会有更多的迭代和 更长运行时间。 指定正确的法向刚度不是一个独立问题,它总是需在结果质量 (精度) 和耗费(运行时间)间寻找平衡。基于这个研究, 法向接触刚度因子为 1.0 是满意的。
SEQV
寻找 FKN 值, 超过此值, 结果 不发生显著的改变
7. 重复步骤 5和6, 直到达到所预期的收敛
FKN
接触刚度
作为一个例子, 对于一个轴上套环的过盈配合分析, FKN 是变 化的,等效von Mises应力的最大值被监控。
ANSYS菜单中英文对照(非常详细)
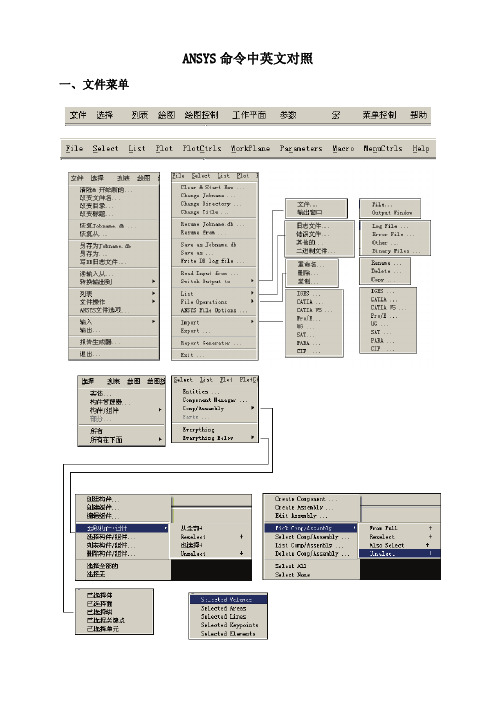
ANSYS命令中英文对照 一、文件菜单二、工具栏三、主菜单1、一级菜单2、二级菜单3、三级菜单4、四级菜单5、五级菜单1、ANSYS12.1 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS) ANSYS电场分析Explicit Dynamics (ANSYS) ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS) ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS) ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS) ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady-State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD) MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA)LS-DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model 机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示【Expand All】展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳: 【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
《2024年基于ANSYS软件的接触问题分析及在工程中的应用》范文
《基于ANSYS软件的接触问题分析及在工程中的应用》篇一一、引言在复杂的工程结构中,不同部分之间的接触问题是一项重要而又具有挑战性的问题。
近年来,ANSYS软件作为一款多功能有限元分析软件,其在处理各种复杂的工程问题中扮演了关键的角色。
本文将详细介绍基于ANSYS软件的接触问题分析方法,并探讨其在工程中的应用。
二、ANSYS软件接触问题分析1. 接触问题分析基础ANSYS软件中的接触问题分析基于有限元法,通过对物体表面之间的相互作用进行建模和分析,以解决接触问题。
接触问题通常涉及到两个或多个物体在力、热、电等作用下的相互作用,其中力是接触问题研究的主要对象。
2. 接触类型及模型ANSYS软件支持多种接触类型和模型,如点对点、点对面、面对面等。
根据不同的接触情况,选择合适的接触类型和模型对于准确分析接触问题至关重要。
例如,在机械工程中,常常需要分析零件之间的摩擦接触;在热工程中,需要分析热传导过程中的热接触等。
3. 接触问题分析流程使用ANSYS软件进行接触问题分析的流程包括建立模型、定义材料属性、划分网格、设置接触对、加载及求解等步骤。
其中,定义接触对是关键步骤之一,需要正确选择主从面、接触类型及模型等参数。
三、ANSYS软件在工程中的应用1. 机械工程在机械工程中,ANSYS软件被广泛应用于分析零件之间的摩擦接触、螺栓连接等工程问题。
通过建立精确的有限元模型,可以预测零件在实际工作过程中的应力分布、变形等情况,为优化设计提供依据。
2. 热工程在热工程中,ANSYS软件可用于分析热传导过程中的热接触问题。
例如,在电子设备散热设计中,通过ANSYS软件分析不同材料之间的热传导及热阻抗,可以优化散热结构,提高设备的性能和寿命。
3. 土木工程在土木工程中,ANSYS软件可用于分析建筑物、桥梁等结构在地震、风载等作用下的动力响应及结构稳定性。
通过建立结构的有限元模型,可以预测结构的变形、应力分布等情况,为结构设计和抗震设计提供依据。
ansysworkbench;菜单选项中英文对照
1、ANSYS12.1 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统】【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS) ANSYS电场分析Explicit Dynamics (ANSYS) ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS) ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS) ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS) ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady-State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD)MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA)LS-DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示Expand All:展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳:【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
Ansys接触分析和设置
Ansys非线性接触分析和设置设置实常数和单元关键选项程序利用20个实常数和数个单元关键选项,来操纵面─面接触单元的接触。
参见《ANSYS Elements Reference》中对接触单元的描述。
实常数在20个实常数中,两个(R1和R2)用来概念目标面单元的几何形状。
剩下的用来操纵接触面单元。
R1和R2 概念目标单元几何形状。
FKN 概念法向接触刚度因子。
FTOLN 是基于单元厚度的一个系数,用于计算许诺的穿透。
ICONT 概念初始闭合因子。
PINB 概念“Pinball"区域。
PMIN和PMAX 概念初始穿透的允许范围。
TAUMAR 指定最大的接触摩擦。
CNOF 指定施加于接触面的正或负的偏移值。
FKOP 指定在接触分开时施加的刚度系数。
FKT 指定切向接触刚度。
COHE 制定滑动抗力粘聚力。
TCC 指定热接触传导系数。
FHTG 指定摩擦耗散能量的热转换率。
SBCT 指定 Stefan-Boltzman 常数。
RDVF 指定辐射观看系数。
FWGT 指定在接触面和目标面之间热散布的权重系数。
FACT 静摩擦系数和动摩擦系数的比率。
DC 静、动摩擦衰减系数。
命令: RGUI:main menu> preprocessor>real constant对实常数 FKN, FTOLN, ICONT, PINB, PMAX, PMIN, FKOP 和 FKT,用户既能够概念一个正值,也能够概念一个负值。
程序将正值作为比例因子,将负值作为绝对值。
程序将下伏单元的厚度作为ICON,FTOLN,PINB,PMAX 和 PMIN 的参考值。
例如 ICON = 说明初始闭合因子是“*基层单元的厚度”。
但是,ICON = 那么表示真实调整带是单位。
若是下伏单元是超单元,那么将接触单元的最小长度作为厚度。
参见图5-8。
图5-8 基层单元的厚度在模型中,若是单元尺寸转变专门大,而且在实常数如 ICONT, FTOLN, PINB, PMAX, PMIN 中应用比例系数,那么可能会显现问题。
ANSYS菜单中英文对照(非常详细)
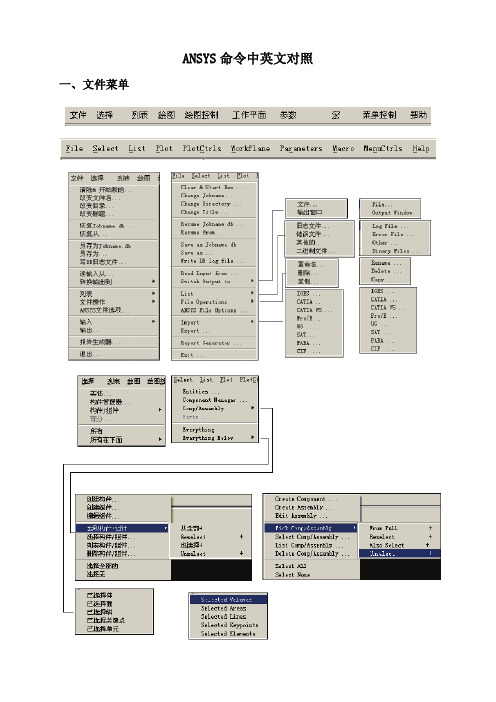
ANSYS命令中英文对照 一、文件菜单二、工具栏三、主菜单1、一级菜单2、二级菜单3、三级菜单4、四级菜单5、五级菜单1、ANSYS12.1 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS) ANSYS电场分析Explicit Dynamics (ANSYS) ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS) ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS) ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS) ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady-State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD) MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA)LS-DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model 机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示【Expand All】展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳: 【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
Ansys界面翻译_中英对照_界面汉化
Ansys界面翻译_中英对照_界面汉化File (文件)菜单Clear &Start New :清除当前数据库并开始新的分析Change Jobname :修改工作文件名Change Directory :修改工作目录的路径Change Title :修改工作文件名Resume Jobnam.db :从默认文件中恢复数据库,其功能等同于工具栏中的RESUNE-DBResume from :从其他路径/工作文件名的文件中恢复数据Save as Jobname.db :以默认文件名存储当前数据库信息,等同于工具栏中的SAVE_DBSave as :以用户自定义的文件名存放当前数据库信息Write DB log file :输出数据库文件Read Imput from :读入命令文件如APDL文件Switch Output to :输出结果文件List :显示文件内容File Operation :设置ansys文件的属性等Ansys File Operation….:为文件指定不同文件名、扩展名以及目录Import :导入其它CAD软件生产的实体模型文件Export:导出IGES格式的文件Report Generator :报告生成器,在完成有限元后可以用它来生产一份完整的报告Exit :退出ansysSelect (选择)菜单Entitles :选择对象Component Manager :组件管理器Comp/Assembly :组件/部件Everything :零件管理器Everytihing Below :选择整个模型中的所有对象List (列表)菜单Files :列表显示文件内容Status :列表显示用户所选内容的状态Keypoint :列表显示关键点的属性和相关数据Lines :列表显示线的属性和相关数据Areas :列表显示面的属性和相关数据Volumes :列表显示体的属性和相关数据Nodes :列表显示节点的属性和相关数据Element :列表显示单元的属性和相关数据Component :列表显示组件的属性和相关数据Picked Entities :列表显示所选对象的属性和相关数据Properties :列表显示要查看的属性Loads :列表显示载荷的信息Other:列表显示模型中其他信息Plot (绘图)菜单Replot :重新绘制图形显示窗口中的模型Keypoints :只绘制关键点Lines :只绘制线Areas :只绘制面Volumes :只绘制体Specified Entities :只绘制特定对象Nodes :只绘制节点日ements :只绘制单元Layered Elements :只绘制分层的单元Materials :只绘制材料属性Data tables :只绘制数据表Array Parameters :数据参数Results :只绘制求解结果Multi-Plots :绘制所有图元Component :只绘制组件Parts :只绘制零件Plotctrls (绘图控制)菜单Pan zoom rotate…:图形变换,包括移动、缩放。
ANSYS中文翻译官方高级手册_adv7
第七章梁分析和横截面形状梁的概况梁单元用于生成三维结构的一维理想化数学模型。
与实体单元和壳单元相比,梁单元可以效率更高的求解。
两种新的有限元应变单元,BEAM188和BEAM189,提供了更强大的非线性分析能力,更出色的截面数据定义功能和可视化特性。
参阅ANSYS Elements Reference中关于BEAM188和BEAM189的描述。
何为横截面?横截面定义为垂直于梁的轴向的截面形状。
ANSYS提供了有11种常用截面形状的梁横截面库,并支持用户自定义截面形状。
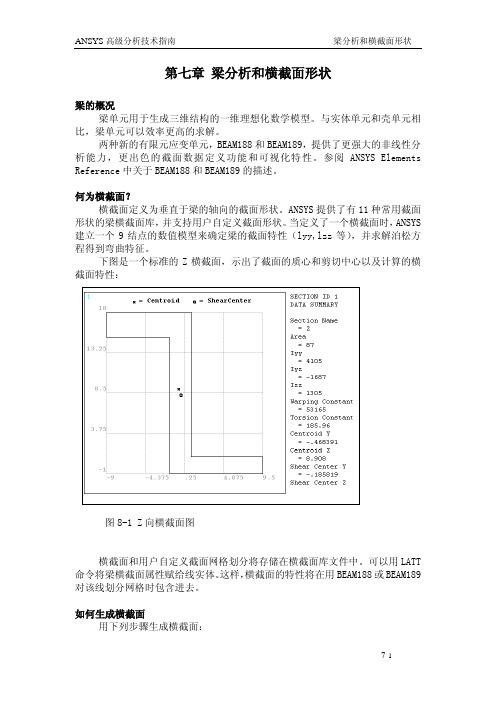
当定义了一个横截面时,ANSYS 建立一个9结点的数值模型来确定梁的截面特性(lyy,lzz等),并求解泊松方程得到弯曲特征。
下图是一个标准的Z横截面,示出了截面的质心和剪切中心以及计算的横截面特性:图8-1 Z向横截面图横截面和用户自定义截面网格划分将存储在横截面库文件中。
可以用LATT 命令将梁横截面属性赋给线实体。
这样,横截面的特性将在用BEAM188或BEAM189对该线划分网格时包含进去。
如何生成横截面用下列步骤生成横截面:1.定义截面并与代表相应截面形状的截面号关联。
2.定义截面的几何特性数值。
ANSYS中提供了下表列出的命令完成生成、查看、列表横截面和操作横截面库的功能:参阅ANSYS Commands Reference可以得到横截面命令的完整集合。
定义截面并与截面号关联使用SECTYPE命令定义截面。
下面的命令将截面号2与定义号的横截面形状(圆柱体)关联:命令:SECTYPE,2,BEAM,CSOLIDSECDATA,5,8SECNUM,2GUI: Main Menu>Preprocessor>Settings>-Beam-Common SectsMain Menu>Preprocessor>-Attributes-Define>Default Attribs要定义自己的横截面,使用子形状(ANSYS提供的形状集合)MESH。
ANSYS中的接触分析教程

一般的接触分类 (2)ANSYS接触能力 (2)点─点接触单元 2点─面接触单元 2面─面的接触单元 3执行接触分析 (3)面─面的接触分析 4接触分析的步骤: 4步骤1:建立模型,并划分网格 (4)步骤2:识别接触对 (4)步骤2:指定接触面和目标面 4步骤4:定义刚性目标面 (5)步骤5:定义柔性体的接触面 (8)步骤6:设置实常数和单元关键字 (9)步骤7:控制刚体目标的运动 (19)步骤8:给变形体单元加必要的边界条件 (20)步骤9:定义求解和载荷步选项20第十步:检查结果 (21)点─面接触分析 (23)点─面接触分析的步骤 (24)点-点的接触 (32)接触分析实例(GUI方法) (34)非线性静态实例分析(命令流方式) (37)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一般的接触分类 (2)ANSYS接触能力 (2)点─点接触单元 (2)点─面接触单元 (2)面─面的接触单元 (3)执行接触分析 (4)面─面的接触分析 (4)接触分析的步骤: (4)步骤1:建立模型,并划分网格 (4)步骤二:识别接触对 (4)步骤三:定义刚性目标面 (5)步骤4:定义柔性体的接触面 (8)步骤5:设置实常数和单元关键字 (10)步骤六: (21)步骤7:给变形体单元加必要的边界条件 (21)步骤8:定义求解和载步选项 (22)第十步:检查结果 (23)点─面接触分析 (25)点─面接触分析的步骤 (26)点-点的接触 (35)接触分析实例(GUI方法) (38)非线性静态实例分析(命令流方式) (42)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS使用的接触单元和使用它们的过程,下面分类详述。
点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
点─面接触单元点─面接触单元主要用于给点─面的接触行为建模,例如两根梁的相互接触。
如果通过一组结点来定义接触面,生成多个单元,那么可以通过点─面的接触单元来模拟面─面的接触问题,面即可以是刚性体也可以是柔性体,这类接触问题的一个典型例子是插头到插座里。
使用这类接触单元,不需要预先知道确切的接触位置,接触面之间也不需要保持一致的网格,并且允许有大的变形和大的相对滑动。
Contact48和Contact49都是点─面的接触单元,Contact26用来模拟柔性点─刚性面的接触,对有不连续的刚性面的问题,不推荐采用Contact26因为可能导致接触的丢失,在这种情况下,Contact48通过使用伪单元算法能提供较好的建模能力。
面─面的接触单元ANSYS支持刚体─柔体的面─面的接触单元,刚性面被当作“目标”面,分别用Targe169和Targe170来模拟2─D和3—D的“目标”面,柔性体的表面被当作“接触”面,用Conta171,Conta172,Conta173,Conta174来模拟。
一个目标单元和一个接单元叫作一个“接触对”程序通过一个共享的实常号来识别“接触对”,为了建立一个“接触对”给目标单元和接触单元指定相同的实常的号。
与点─面接触单元相比,面─面接触单元有好几项优点,·支持低阶和高阶单元·支持有大滑动和摩擦的大变形,协调刚度阵计算,单元提法不对称刚度阵的选项。
·提供工程目的采用的更好的接触结果,例如法向压力和摩擦应力。
·没有刚体表面形状的限制,刚体表面的光滑性不是必须允许有自然的或网格离散引起的表面不连续。
·与点─面接触单元比,需要较多的接触单元,因而造成需要较小的磁盘空间和CPU时间。
·允许多种建模控制,例如:·绑定接触·渐变初始渗透·目标面自动移动到补始接触·平移接触面(老虎梁和单元的厚度)·支持死活单元使用这些单元,能模拟直线(面)和曲线(面),通常用简单的几何形状例如圆、抛物线、球、圆锥、圆柱采模拟曲面,更复杂的刚体形状能使用特殊的前处理技巧来建模。
执行接触分析不同的接触分析类型有不同的过程,下面分别讨论面─面的接触分析在涉及到两个边界的接触问题中,很自然把一个边界作为“目标”面而把另一个作为“接触”面,对刚体─柔体的接触,“目标”面总是刚性的,“接触”面总是柔性面,这两个面合起来叫作“接触对”使用Targe169和Conta171或Conta172来定义2-D接触对,使用Targe170和Conta173或Conta174来定义3-D 接触对,程序通过相同的实常收号来识别“接触对”。
接触分析的步骤:执行一个典型的面─面接触分析的基本步骤列示如下:1.建立模型,并划分网格2.识别接触对3.定义刚性目标面4.定义柔性接触面5.设置单元关键字和实常的6.定义/控制刚性目标面的运动7.给定必须的边界条件8.定义求解选项和载荷步9.求解接触问题10.查看结果步骤1:建立模型,并划分网格在这一步中,你需要建立代表接触体几何形状的实体模型。
与其它分析过程一样,设置单元类型,实常的,材料特性。
用恰当的单元类型给接触体划分网格。
命令:AMESHVMESHGUI:Main Menu>Preprocessor>mesh>Mapped>3 or4 SidedMain Menu>Pneprocessor>mesh>mapped>4 or 6 sided步骤二:识别接触对你必须认识到,模型在变形期间哪些地方可能发生接触,一是你已经识别出潜在的接触面,你应该通过目标单元和接触单元来定义它们,目标和接触单元跟踪变形阶段的运动,构成一个接触对的目标单元和接触单元通过共享的实常号联系起来。
接触环(区域)可以任意定义,然而为了更有效的进行计算(主要指CPU 时间)你可能想定义更小的局部化的接触环,但能保证它足以描述所需要的接触行为,不同的接触对必须通过不同的实常数号来定义(即使实常数号没有变化)。
由于几何模型和潜在变形的多样形,有时候一个接触面的同一区域可能和多个目标面产生接触关系。
在这种情况下,应该定义多个接触对(使用多组覆盖层接触单元)。
每个接触对有不同的实常数号。
步骤三:定义刚性目标面刚性目标面可能是2—D的或3─D的。
在2—D情况下,刚性目标面的形状可以通过一系列直线、圆弧和抛物线来描述,所有这些都可以用TAPGE169来表示。
另外,可以使用它们的任意组合来描述复杂的目标面。
在3—D情况下,目标面的形状可以通过三角面,圆柱面,圆锥面和球面来推述,所有这些都可以用TAPGE170来表示,对于一个复杂的,任意形状的目标面,应该使用三角面来给它建模。
控制结点(Pilot)刚性目标面可能会和“pilot结点“联系起来,它实际上是一个只有一个结点的单元,通过这个结点的运动可以控制整个目标面的运动,因此可以把pilot结点作为刚性目标的控制器。
整个目标面的受力和转动情况可以通过pilot结点表示出来,“pilot结点”可能是目标单元中的一个结点,也可能是一个任意位置的结点,只有当需要转动或力矩载荷时,“pilot结点”的位置才是重要的,如果你定义了“pilot结点”ANSYS程序只在“pilot结点”上检查边界条件,而忽略其它结点上的任何约束。
对于圆、圆柱、圆锥、和球的基本图段,ANSYS总是使用条一个结点作为“pilot结点”基本原型你能够使用基本几形状来模拟目标面,例如:“圆、圆柱、圆锥、球。
直线、抛物线、弧线、和三角形不被允许、虽然你不能把这些基本原型彼此合在一起,或者是把它们和其它的目标形状合在一起以便形成一个同一实常数号的复杂目标面。
但你可以给每个基本原型指定它自己的实常的号。
单元类型和实常数在生成目标单元之前,首先必须定义单元类型(TARG169或TARG170)。
命令:ETGUI:main menu>preprocessor>Element Type> Add/Edit/Delete 随后必须设置目标单元的实常数。
命令:RealGUI:main menn>preprocessor>real constants对TARGE169和TARGE170仅需设置实常数R1和R2,而只有在使用直接生成法建立目标单元时,才需要从为指定实常数R1、R2,另外除了直接生成法,你也可以使用ANSYS网格划分工具生成目标单元,下面解释这两种方法。
使用直接生成法建立刚性目标单元为了直接生成目标单元,使用下面的命令和菜单路径。
命令:TSHAPGUI:main menu>preprocessor>modeling-create>Elements>Elem Attributes 随后指定单元形状,可能的形状有:· straight line (2D)· parabola (2-D)· clockwise arc(2-D)· counterclokwise arc (2-D)· circle(2-D)· Triangle (3-D)· Cylinder (3-D)· Cone (3-D)· Sphere (3-D)· Pilot node (2-D和3-D)一旦你指定目标单元形状,所有以后生成的单元都将保持这个形状,除非你指定另外一种形状。
然后你就可以使用标准的ANSYS直接生成技术生成结点和单元。
命令:NEGUI:main menu>pnoprocessor> modeling- create> nodesmain menu>pnoprocessor> modeling- create>Elements 在建立单元之后,你可以通过列示单元来验证单元形状命令:ELISTGUI:utility menu>list>Elements>Nodes+Attributes使用ANSYS网格划分工具生成刚性目标单元你也可以使用标准的ANSYS网格划分功能让程序自动地生成目标单元,ANSYS程序将会以实体模型为基础生成合适的目标单元形状而忽略TSHAP命令的选项。