RoboCup仿真机器人11:112D足球比赛
第4章 Robocup仿真比赛
比赛环境的特点
• (1)动态实时系统。比赛每个仿真周期为 100ms,要求Agent在此时间内完成全部计算 并将要执行的命令, 否则将失去机会。 • (2) 环境干扰。 • (3) 合作与协调。全部 Agent 具有一个共同 的目标, 需要使用有效的方法进行 Agent 之 间的合作, 同时解决局部目标与全局目标, 个 体目标与共同目标之间冲突的问题。 • (4) 受限的通讯带宽。
Path Taken
• If robot started at this location, it would take the following path • It would only “feel”the vector for the location, then move accordingly, “feel” the next vector, move, etc. • Pfield visualization allows us to see the vectors at all points, but robot never computes the “field of vectors” just the local vector
• 命令dash用来在球员身体躯干朝向的方向上 给予一个加速度,命令turn用来改变球员的 身体朝向。命令turn的参数是moment。
移动(move) 移动
• 命令move可以把球员移动到场上的任何一 个地方。只有在设置整个球队时move命令 才有效,在比赛期间是没有效果的。
turnBodyToPoint的实现 的实现 的实
Basic Player
SenseHandle
ActHandle
Parse
Connection
仿真机器人足球
// 场地上边界 // 场地下边界 // 场地右边界 // 场地左边界 // 球门上边界 // 球门下边界 // 球门右边界 // 球门左边界
4. 控球方
❖ const long ANYONES_BALL = 0; ❖ const long BLUE_BALL = 1; ❖ const long YELLOW_BALL = 2;
7.小球的位置定义
typedef struct {
Vector3D pos; } Ball;
// 小球的坐标位置
10
8.场地区域范围
typedef struct {
long left, right, top, bottom; } Bounds;
07
2.7 程序每周期发送的数据
策略程序发送给仿真平台的数据: ❖ 己方( home[i] )每个机器人的左轮速度(vl)和
右轮速度(vr) ❖ 注:当前发送的数据要到下一周期才能执行。
3.策略程序
3.1 策略类视图
02
3.2 环境接口文件InterFace.h 03
1.环境信息
//主要的定义,包含所有运行时的的信息,由系统刷新
2.3 场地信息介绍
03
(6.8118, 77.2392)
(93.4259, 77.2392)
பைடு நூலகம்(:)
单 位 英 寸
(6.8118, 6.3730) (0,0) 说明:1英寸= 2.54厘米
(93.4259, 6.3730)
(:)
2.4 场地的各种标志及尺寸 04
单 位 厘 米
2.5 球与车的长度尺寸 05
velocityRight; } Robot
// x 和 y 为坐标值
RoboCup仿真组(3D)比赛规则

2013中国机器人大赛暨RoboCup公开赛RoboCup机器人足球仿真组(3D)比赛规则这篇文档介绍2013年中国机器人大赛暨RoboCup公开赛机器人足球仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性。
技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或者建议可以向技术委员会反馈,技术委员会保留最终决定权。
技术委员会联系方式:邮箱地址kian.hsueh@。
1.比赛赛程安排1.1注册阶段所有参赛球队都需要注册,请将以下信息发送至技术委员会邮箱:●球队名称;●国家;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档;●球队可执行码;注册截止日期是2013年9月15日。
请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
1.2预选赛阶段本次比赛将设立预选阶段。
2012中国机器人大赛暨RoboCup中国公开赛仿真组(3D)比赛的四强(南京邮电大学,东南大学,常州工学院,河海大学)直接进入现场比赛阶段,其他所有球队必须参加预选阶段的审核。
预选阶段需要提交如下两份材料:●球队描述文档:文档中须介绍球队的底层框架,以及在球队方面所做的主要工作。
●球队可执行码:可执行码以11VS11进行对战,需包含start.sh和kill.sh脚本以及所依赖的所有库文件。
请在64位ubuntu系统下编译可执行码后再提交。
请所有需要进行预选阶段的球队将所需材料打包,命名为“球队名.tar.gz”,发送到技术委员会邮箱,截止日期是2013年9月25日,注册阶段已经发送过的队伍,可以不用重复发送。
技术委员会将对所有报名球队的材料进行审核,如果审核通过,技术委员会会尽快回复一封确认邮件。
只有审核通过的球队才能获得本次比赛的参赛资格。
1.3现场比赛阶段TBA2.比赛日程安排TBA3.机器配置和软件环境3.1ServerTBA3.2ClientTBA3.3Software操作系统:Ubuntu 12.10(64bit)依赖库:ODE 0.11.1 + TBB patch, Ruby >= 1.9.3p194仿真环境:simspark 0.2.4, rcssserver3d 0.6.74.获胜规则4.1循环赛阶段循环赛阶段,小组内每两支队伍之间都要进行一场比赛。
智能机器人足球比赛规则

智能机器人足球比赛规则一、比赛场地及设备标准1、场地:长240cm,宽160cm,高18cm。
2、墙壁:场地边界放置墙壁(包括球门区),由木板制成。
墙壁外侧为红、黄、绿相间的彩色,球场墙壁内侧为黑色,球门墙壁(三面)内侧为白色。
3、球门:球门位于场地底线的中间,宽60cm,深15cm,门前有一条宽0.8cm的红色球门线。
4、基板:球场铺有一张灰度由浅至深的黑白图纸,基板应尽量保持平整和水平。
5、球门区:从球门线两端向中场延伸20cm的矩形区域。
6、点球位:两个半场内距球门线中点垂直距离60cm处。
7、开球点:球场中央点。
8、坠球点:经过点球位,与中场线平行,形成2条线;再将球场纵向4等份,形成3条线。
这样,包括中场线在内的6条线所形成的9个交点即为坠球点(见上图)。
(在真实的场地中坠球点没有明显标志)9、照明:为室内体育馆灯光。
10、机器人:机器人体积(包括静止和比赛状态)必须在一个直径为30cm 圆的范围内,限高22cm,限重2.5kg。
机器人(形成三面包围球体的)踢球装置的深度最大为3cm。
11、足球:直径9cm,重160±5g。
是一个内部装有电池与小电珠的透明发光球(波长范围为810-700nm;光幅射密度为单个150Lm;光线直接、均匀地覆盖球面,且无盲点)。
二、名词解释1、出界球:足球(越过墙壁)被机器人踢出球场外。
2、进球:足球的中心(即球的1/2以上)越过球门线且非出界球,即为进球。
3、死球:足球被机器人和墙夹在中间无法移动、或足球被多个机器人包围卡住不动超过10秒钟时,则为死球。
4、丢球:机器人在第一次踢出球以后5秒内没有再接触到球。
5、比赛中断:裁判员吹哨宣布比赛开始或继续后,在20秒内没有任何机器人触到球,而且看上去没有机器人将会触到球,为比赛中断。
6、坠球:当发生死球或比赛中断时所采用的继续开始比赛的方式。
7、任意球:发生犯规判罚、出界球、点球未中时所采用的继续开始比赛的方式。
RoboCup中型组足球机器人比赛历届成绩表
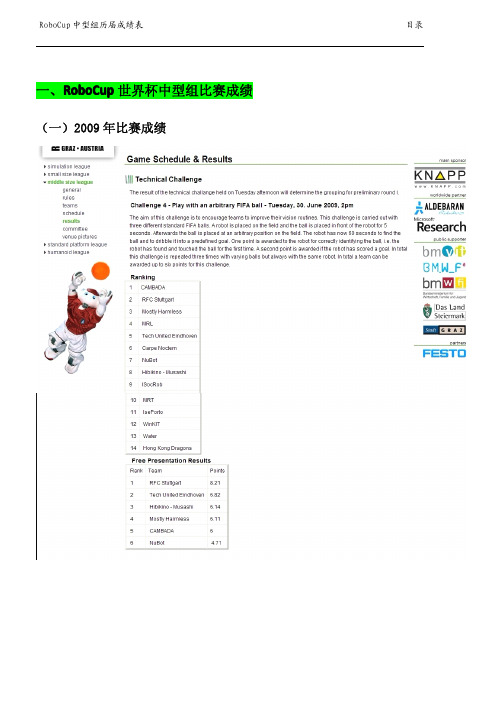
RoboCup中型组历届成绩表目录一、RoboCup世界杯中型组比赛成绩(一)2009年比赛成绩(二)2010年比赛成绩(三)2011年比赛成绩二、中国机器人大赛暨RoboCup公开赛(一)2008年中国公开赛中型组足球机器人比赛成绩2008中国机器人大赛暨RoboCup中国公开赛中型组比赛名次第一名(冠军):国防科学技术大学猎豹队(NuBot)第二名(亚军):北京信息科技大学与滨州学院水队(WATER)第三名(季军):上海大学&上海工程技术大学联队中型组(Legends)第四名:南通大学胜利11人队(Victor11)中型组技术挑战规定项目奖一等奖(1名):上海大学-上海工程技术大学联队(Legends)二等奖(2名):国防科学技术大学猎豹(NuBot)队华南理工大学百步梯(SC100Steps)队三等奖(3名):西北师范大学-南阳理工学院剑龙队攀枝花学院赛英(SIEE)队江西财经大学超越者(Surpasser)队注:一等奖为得分第一名二等奖为得分第二、三名三等奖为得分第四、五、六名技术挑战自选项目奖一等奖(1名):华南理工大学百步梯(SC100Steps)队二等奖(2名):上海交通大学交龙(JiaoLong)队国防科学技术大学猎豹(NuBot)队三等奖(3名):上海大学-上海工程技术大学联队(Legends)西北师范大学-南阳理工学院剑龙队南京农业大学-淮安信息职业技术学院向前联队(Advancing)注:一等奖为得分第一名二等奖为得分第二、三名三等奖为得分第四、五、六名2008中国机器人大赛暨RoboCup中国公开赛中型组比赛获奖名单一等奖(3名):国防科学技术大学猎豹队(NuBot)北京信息科技大学与滨州学院水队(WATER)上海大学-上海工程技术大学联队中型组(Legends)二等奖(5名):南通大学胜利11人队(Victor11)北京航空航天大学-北方工业大学雏鹰队(EYAS)上海交通大学交龙队(JiaoLong)江西渝州科技职业学院渝州雄鹰队北京工商大学功夫队(KUNGFU)三等奖(7名)南京农业大学-淮安信息职业技术学院向前联队(Advancing)西北师范大学-南阳理工学院剑龙队福州大学长征队常州信息职业技术学院腾信队广东工业大学太极队(Taiji)华南理工大学百步梯队(SC100Steps)江西财经大学超越者队(Surpasser)组织奖:上海第二工业大学金海队攀枝花学院赛英(SIEE)队西安科技大学胡杨队电子科技大学中山学院博爱队湖南农业大学惟盛队河海大学e龙(E-Dragon)队天津师范大学天师Strive(TJNUSTrive)队注:一等奖为比赛的冠、亚、季军。
Robocup仿人组比赛规则

2006 RoboCup中国公开赛类人组比赛规则I 前言该规则目标是保证机器人世界杯的公平竞争,其鼓励创造和技术发展。
现在该规则与FIFA的比赛规则有差异,但旨在将来减小差异,旨在达到机器人能与人进行比赛的长期目标。
类人机器人比赛的研究挑战是维持行走、跑步、踢球以及其执行其他动作时的动态稳定性,同时兼顾运动与视觉的配合,类人足球机器人必须有能够对抗其他队员的健壮性。
文档没有包含的部分可以参考FIFA比赛规则。
II 组别尺寸相差较大的机器人在一起比赛是不可行的,因此该比赛分为KidSize组和TeenSize组。
见第四部分对分组的详细描述。
赛前,每个参赛机器人都须经过比赛前24小时内的全面检查,以满足各种参赛机器人要求,要做改动可能需要重新受检,重新检查须在赛前10min之前。
III 比赛项目比赛共分为两大类、五个单项进行比赛,即1、2对2足球比赛2、技术挑战赛(分为四个单项)a.点球大战(PK)b.竞速c.绕柱行走d.传球IV 奖励两类比赛分别决出冠军、亚军和季军,并由组委会授奖;技术挑战赛中的各个单项一、二、三名,颁发证书。
VI 具体要求:1、比赛场地比赛场地为一个矩形场地,该场地有两个球门,边线,六个起始标记点和四个角球柱。
各尺寸标注如下:1.1 比赛场地比赛场地铺以绿色地毯,白线5cm宽。
10cm长的线段用于标记点球点、起始点、开球点等。
球场长度方向的边线叫做接触线、宽度方向的边线叫球门线。
各个点的定义如图所示,场地外部一定范围也被绿色地毯覆盖,该范围外没有特殊说明。
1.2 球门球门位于球门线的中间,球门内部三面涂色,一边球门为黄色,另一边为蓝色,KisSize组球门在90cm高有横梁,TeenSize组球门高120cm,没有横梁。
球门的外部、球门柱、横梁都是白色。
1.3 角球柱球场四个角均布置一个角球柱,角球柱直径20cm,高90cm,分为相等的三段,每段30cm,底部和顶部涂以和球门壁同样的颜色,中间的部分涂以对面球门壁的颜色。
基于Robocup机器人足球竞赛大学生创新能力培养
基于Robocup机器人足球竞赛的大学生创新能力培养随着我国科学技术的进步和市场经济的快速发展,社会各个层面的竞争越来越激烈,社会对大学生的素质也提出了新的要求,新时代的大学生不但要有扎实的理论知识,更需要有创新能力和实践能力。
这个新的变化引起了教学主管部门、高校、家长和大学生本人的广泛关注。
我校从2004年起组织学生参加国内外robocup机器人竞赛,并取得了较好的成绩:2004年中国机器人大赛robocup 2d仿真组冠军;2009年伊朗机器人国际公开赛3d仿真组季军;2010年新加坡世界杯3d仿真组冠军;2011年土耳其世界杯3d仿真组季军;2011年中国机器人公开赛3d仿真组冠军;2011年江苏省机器人大赛3d 仿真组冠军等等。
机器人竞赛的全面开展对提升我校电类专业学生的创新实践能力和增强就业竞争力发挥了积极作用,也加深了我们对自动化类课程实践教学重要性和必要性的认识,强化了我们对学生动手能力的训练,促进了我们对学生基本素质的培养。
学生创新实践能力通过机器人竞赛的成绩来体现,并在竞赛实施过程中得以培养和提高。
近年来,我们贯彻教育部质量工程建设,在实施机器人竞赛过程中,以校级大学生机器人创新基地为龙头,积极开展教学改革。
在教学团队建设、课程体系建设、注重实践教学、重视学生第二课堂等方面全面开展了大学生创新与实践能力培养新途径的探索。
开展了如何培养学生的兴趣、如何在实验中发挥学生的主体作用、如何鼓励学生利用课余时间进行电子系统开发、如何营造创新环境、如何培养学生的创新意识、如何提高学生的创新能力、如何激发教师的指导热情等课题研究,积累了一定的经验,取得了一定的成效。
在这过程中逐步形成了一个竞赛经验丰富的教学团队和一套卓有成效的竞赛培训体系。
但是如何以机器人竞赛为载体,促进大学生创新与实践能力培养,我们还有很多需要探索和改进的地方,本文从以下几个方面进行改革。
一、竞赛教材的编写以培养学生的创新实践能力为目标,完善培训课程设置、完善培训教学大纲、完善培训教材。
仿真足球机器人比赛技术动作设计与实现
仿真足球机器人比赛技术动作设计与实现Design and Implementation of Action of Simulated Soccer Robot学院:专业班级:学号:学生姓名:指导教师:摘要机器人足球比赛是近年来人工智能和机器人领域的研究热点之一,它是高技术与娱乐性的完美结合,融合了多种学科,促进了人工智能和机器人的研究和教育。
而仿真足球机器人比赛是其中的一种比赛形式,具有成本低、实际干扰因素小、实验可重复等优点,方便足球机器人的普及。
在仿真足球机器人比赛中机器人的比赛动作设计有重要的基础作用,如果最终的动作执行不到位,会导致策略系统的效率低下。
论文目的在于能够编程实现机器人足球比赛中的技术动作设计和运行结果的实时显示,以满足比赛的基本需求,为上层策略系统提供良好的支持。
论文的工作基于国际机器人足球联盟(FIRA)仿真比赛SimuroSot 5vs5组的仿真系统The Robot Simulater,并对该平台以及机器人的运动学模型和重要动作函数的算法做了较为详细的介绍。
在此平台之上使用VC++ 6.0对仿真足球机器人的基本比赛技术动作进行设计与开发,编程实现了仿真足球机器人的基本比赛动作。
其中包括原地转角、到顶点、定向运动、截球、传球、射门等动作。
通过对单独动作在仿真平台上实际运行效果的测试,基本达到了预期的目的,满足了比赛的基本需求,可为上层策略系统提供动作支持。
关键词:机器人足球比赛;技术动作;仿真AbstractIn recent years, robot soccer is one hot spot of the robot and artificial intelligence research fields, it is a perfect combination of high technology and entertaining .The robot soccer needs many branches of learning and promotes the artificial intelligence research and education. And the simulation soccer robot game is one form of the game of robot soccer. It costs low and can avoid form the actual interference factors and repeat in the same condition. In the simulation soccer game robot soccer action design plays an important and basic role, if the final executive does not reach the designated position, that will lead to low efficiency of the strategy system. The objective of this thesis is to accomplish the programming of the robot soccer movement design and the operation results can be real-time displayed, in order to meet the basic needs of the soccer game and provide good support to the strategy for upper system.The thesis is based on the Federation of International Robot-soccer Association (FIRA) SimuroSot 5vs5. The simulation system platform is the Robot Simulater. It gives the robot platform 、kinematics model and the algorithms of important movement functions a detailed introduction. In this platform , by using VC++ 6.0, the robot technique actions in the simulated robot-soccer game are designed and developed, and realized the basic actions in the simulation robot-soccer game in C++, Including angle, position, moving, blocking the ball, passing, shooting and such actions. All the actions have been tested in the simulation platform and achieve the expected performance. The result showed that the design could meet the basic needs of the game and support the upper strategy system.Key words: Robot Soccer; Technique Action; Simulation目录摘要 (I)Abstract (II)第1章绪论 (1)1.1课题研究的意义 (1)1.2国内外研究现状 (2)1.3主要研究的内容 (3)第2章仿真足球机器人相关开发背景介绍 (5)2.1仿真足球机器人运动学模型 (5)2.1.1运动学物理模型 (5)2.1.2运动学物理模型的约束 (6)2.2机器人足球仿真平台 (8)2.2.1机器人足球仿真平台介绍 (8)2.2.2仿真软件使用说明 (10)2.3编程向导 (11)2.3.1场地信息和比赛信息 (11)2.3.2平台环境 (12)2.3.3接口函数 (13)2.4仿真平台工作原理 (13)第3章仿真足球机器人动作总体设计 (15)3.1动作设计的目的和意义 (15)3.2足球机器人动作特点 (15)3.3仿真足球机器人动作模块结构 (16)第4章仿真足球机器人动作详细设计 (18)4.1仿真足球机器人基本动作 (18)4.1.1移动动作 (18)4.1.2转角动作 (18)4.1.3 到定点动作 (22)4.1.4 定向运动动作 (26)4.2仿真足球机器人技术动作 (27)4.2.1截球动作 (27)4.2.2踢球动作 (29)4.2.3传球动作 (32)4.2.4射门动作 (32)4.2.5其他动作 (34)第5章结论 (36)参考文献 (37)致谢 (39)第1章绪论1.1课题研究的意义机器人足球竞赛是近年来国际上迅速开展起来的一种高科技对抗活动,它涉及人工智能、机械、通讯、传感等多个领域的前沿研究和技术融合。
RoboCup机器人足球世界杯

RoboCup: 机器人足球世界杯什么是RoboCup?•一个为促进足球机器人的发展而创立的国际性组织机器人足球世界杯(RoboCup)是一个国际性的研究和教育组织,它通过提供一个标准问题来促进人工智能和智能机器人的研究。
这个领域可以集成并检验很大范围内的技术,同时也可以作为面向教育的集成性项目。
•在国际性委员会的管理下举行国际性的会议和比赛为了这个目的,RoboCup选择了足球比赛作为基本的领域,并组织了RoboCup:机器人足球世界杯及学术会议。
为了能让一个机器人球队真正能够进行足球比赛,必须集成各种各样的技术,包括自治智能体的设计准则、多智能体合作、策略获取、实时推理、机器人学以及传感器信息融合等。
对一个由许多快速运动的机器人组成的球队来说,RoboCup是一项在动态环境下的任务。
在RoboCup 的软件方面,RoboCup还提供了软件平台以便于研究。
在将足球比赛作为标准问题的同时,还会有其它各种各样的努力,比赛只是RoboCup各项活动的一部分.当前RoboCup的活动包括:•学术会议•机器人世界杯•RoboCup挑战计划•RoboCup教育计划•基础组织的发展•比赛的组成不过,机器人世界杯比赛还是我们各项活动的中心,在那儿研究者们可以在一起评估研究进展。
现在,RoboCup举行以下比赛:•模拟组比赛•小型机器人比赛•整队小型机器人比赛,每队包括11个机器人•中型机器人比赛•Sony有腿机器人比赛(由Sony赞助)•人形机器人比赛(从2002年开始,2002年前可能会有演示)•遥控机器人比赛(即将公布)•RoboCup评论员系统演示为什么要有RoboCup?•推动科学进步我们的意图是通过提供引人瞩目但又非常困难的挑战,将RoboCup作为促进人工智能和机器人学研究的工具。
促进研究的有效途径是制定一个长期目标,而不拘泥与某一特定应用。
当这个目标完成时,将产生巨大的社会影响,这就可以称之为重大挑战计划。
Robocup中型组足球竞赛机器人

机器人竞赛是机器人技术应用的热点。可以很好地锻炼学生的动手能力、组织能力、协调能 力和临场应变、突发问题处理能力等重要的工程素养。同时,机器人竞赛可以很好地吸引学 生参加,在学校或者院系塑造良好的工程实践教育氛围,引导更多的学生学习。 博创科技可以提供 RoboCUP 中型组、家庭组竞赛平台,机器人擂台赛、机器人游中国或机 器人舞蹈赛等平台,以及 CCTV 机器人电视大赛和职业类院校技能大赛所需的机器人平台 及服务。 方案概述
冠军。 这是历史上中国参赛队伍获得的第一个 RoboCup 中型组冠军。 博创科技的紧 密配合和支持为水队的发展提供了良好条件。 2011 年, 在土耳其伊斯坦布尔 RoboCup 世界杯比赛中, 北信科大再次蝉联中 型组足球世界杯冠军! 同时, 博创科技为水队发表科研论文提供了大量基础数据和实验方面的良好 支持。 主要器材 旅行家 3 号移动机器人平台
智能机器人竞赛
最高起点!
提 供 全 国 冠 军 、世 界 冠 军 的 程 序 、算 法 、源 代 码和技术文档
机器人游中国 /机 器 人 舞 蹈 等 �创 意 之 星 机 器人套件
机器人武术擂 台 赛 �创 意 之 星 机 器 人 套 件 /竞 赛配件
R oboC up 中 型组机器人足 球 赛 �旅 行 家 3号 移动机器人
2008 年 RoboCup 世界杯 2008 年中国机器人大赛 上海大学-Strive,第八名(学校自主研发) 国防科大-Nubot,冠军(学校自主研发) 北京信息科大-Water,亚军(采用博创产品) 上海大学-Strive,季军(学校自主研发) 2009 年 RoboCup 世界杯 2009 年中国机器人大赛 北京信息科大-Water,第七名(采用博创产品) 国防科大-Nubot,第八名(学校自主研发) 北京信息科大-Water,亚军(采用博创产品) 国防科大- Nubot,季军(学校自主研发) 上海大学- Strive,第四名(学校自主研发) 2010 年 RoboCup 世界杯 北京信息科技大学-Water,冠军(采用博创产品)
仿真机器人足球比赛11vs11策略浅析
/ / 数据 层… 一 以获 取平 台 返还数 据 用 3 od c o( . iA t n) v i ;
vi oioG a F o t on) od si ol P i it P tn ( np ;
/ 门员跑 位 / 守
解析 :一般 不用 守 门员跑位 函数 , 层 自带 的守 门员 函数 已 底 经 比较 强大 了 ,守 门员的 主要任 务就 是 防守 ,所 以通 常 比赛 不 用
R bt* G ,O K;对方 守 门员 、主要 踢球 者 oo O K* M H
it n WhcK; ih / / 踢球 者
d u eLe H , nO; o bl n Le
三 、仿真 机 器人 足球 比赛 策 略
( )编写 策 略建议 一
1 区不要 太细 . 分
/ / 足球 距 自己大 门,对 方大 门的距 离 二 、仿 真机 器 人足球 比赛 底层 优化 ( )底 层 的主要 结构 一
速 Kc(/ i )/ k ; 踢球
, / 队员 和足 球 。 由于 以上两 个变 量 是结 构指 针 ,调 用时 我方
应 该用 以下形 式
例如 : H me ] P s in o [ 一 o io . 0> t x
Bal>P iin. l 一 osto x
解 析 :( 点 )踢 球方 向不 准 ,未 对球 运动 方 向预 测 ,机 器 缺 人存 在 卡死现 象 。 方 法调用 条件 不 满足 :无 防碰 撞机 制 。
v i P st n cit od oi o Ac ( i n whc , ih F on p it P it on, b o ol
、
机 器人 足球 仿真 平 台
2011RoboCup仿真组(3D)比赛规则
如果出现平局: • 净胜球高者胜 • 如果进球数一样,进行对垒的比赛胜者胜,如果双方还是平局,则进行多一场比赛 • 如果加赛依然平局,进行点球模式,每队有5次点球机会。 • 如果结果还是平局,将在组织委员的监督下,由双方队长掷币定胜负
本规则以官方网站上公布的最新版本为准。 本规则最终解释权归2011中国机器人大赛暨 RoboCup 中国公开赛仿真组技术委员会所 有。
3.比赛方式
比赛采取9VS9方式对战,局部视觉
4.概要事项与裁判
• 组织委员可以在 server 安装期间、首轮比赛之前为各队伍进行测试,但比赛期间无 此义务。 • 在每轮比赛期间,各队伍无权访问各自的 home 目录,不可替换球队版本。但在两轮 比赛之间,各队伍可以上传新的球队版本到相应的 home 目录下。 • 各 agent 应在组织委员指定的脚本格式下自动开启和关闭,即要有 start.sh 和 kill.sh。 • 每组每轮比赛都有一个裁判。基本上裁判将是组织委员会中的成员,但也可以由组织 委员会主席指定一个对比赛规则完全了解的志愿者或非比赛队伍成员来担当裁判。 • 裁判不可对本队比赛进行裁决。组织委员应该协助裁判。 • 正式比赛时,由裁判启动仿真器并启动自动比赛系统。若赛前经过多次尝试均无法正 常使用自动比赛系统,在征得组织委员会及比赛双方的同意下,由对方或在场志愿者手 动启动球队程序。赛前请务必做好测试工作,否则后果自负。本次比赛不使用 NFS 文件 服务器,双方球队的可执行码直接存放在各自的 client 机器中。 • 裁判应该在仿真器不可预测的情况下发挥作用,包括队伍犯规和比赛无法进行下去的 情况。
6.公平比赛规则
我们的目标是在公平的、正确理解足球的和遵守3D 仿真世界带来的约束的情况下进行足 球比赛。以下行为被认为妨碍比赛公平性而被实施在比赛过程中是被严禁的:
机器人足球比赛策略仿真系统的设计与建模

© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第 1 期 戴 皓 李小坚 :机器人足球比赛策略仿真系统的设计与建模 2 7
在机器人足球比赛中避障是很重要的 ,这 因为碰撞对方会被判罚. 我们采用基于势场的 避障方法 ,其基本思想为 :障碍物对机器人有斥 力作用 ,而目标点则对机器人有引力作用. 机器 人的前进方向就是这个引力和斥力合作用力的 方向 (见图 2) . 力的大小是机器人到目标点或 障碍物距离的函数. 一种可行方案是斥力和机 器人与障碍物的距离的平方成反比 ,而引力和
关键词 多智能体系统 ;机器人足球比赛 ;建模 ;策略 ;仿真 分类号 TP242
机器人足球比赛是一个在智能机器人领域 出现的典型的多智能体系统 (Multi2Agent Sys2 tem) ,它是一个集成视觉技术 、无线电通讯技 术 、伺服控制技术 、多传感器融合技术 、战略战 术及仿真等技术的综合系统. 微机器人世界杯 足球比赛已引起世界各国的广泛关注. 机器人 足球比赛是一个高度集成化信息技术系统 ,它 标志着一个国家的通讯技术 、传感器技术 、实时 视觉技术 、机器学习 、仿真等技术水平的高低 , 所以一个国家的机器人足球比赛研究的水平往 往能够反映该国信息工业现代化的程度.
图 2 机器人避障示意图
2. 2 基本动作
(1) 射门和点射.
当球队进攻或传球时 ,常使用射门和点射
动作. 若给出球和球门的位置 ,则可计算出它们
的相对位置. 射门如图 3 所示 ,点射如图 4 所
示. 如果满足下列两个条件就可以射门 : (1) 球
位于机器人和球门之间 ; (2) 从机器人到球所成 直线在球门覆盖区内 ,就是 θl ≤θb ≤θh.
FIRA和RoboCup两大机器人足球赛的区别

Robocup2D入门介绍发布时间:2010-07-22 浏览次数:一机器人足球简介机器人足球赛,顾名思义,就是制造和训练机器人进行足球比赛。
通过这种方式来提高人工智能领域、机器人领域的研究水平。
从1997年起,每年举办一界机器人世界杯足球赛。
机器人足球赛涉及人工智能、机器人学、通讯、传感、精密机械和仿生材料等诸多领域的前沿研究和技术集成,实际上是高技术的对抗赛。
国际上最具影响的FIRA和RoboCup两大世界杯机器人足球赛,有严格的比赛规则,融趣味性、观赏性、科普性为一体。
机器人足球赛从一个侧面反映了一个国家信息与自动化领域基础研究和高技术发展的水平。
RoboCup的最终目标是:到21世纪中叶,一支完全自治的人形机器人足球队应该能在遵循国际足联正式规则的比赛中,战胜最近的人类世界杯冠军队。
目前,有关机器人足球比赛的国际组织有两个:FIRA组织和Robocup联合会。
FIRA(Federation of International Robot-Soccer association),它是由韩国人创立的组织,从1997年开始,FIRA每年都举行一次机器人足球世界杯决赛(FIRA Robot_Soccer World Cup),简称FIRA RWC。
FIRA的比赛项目主要有:超微机器人足球赛、单微机器人足球赛、微型机器人足球赛、小型机器人足球赛、自主式机器人足球赛、拟人式机器人足球赛、仿真机器人。
RoboCup(Robot World Cup),即机器人世界杯足球锦标赛。
它是国际上一项为提高相关领域的教育和研究水平而举行的大型比赛和学术活动,通过提供一个标准任务来促进分布式人工智能、智能机器人技术、及其相关领域的研究训练和制造机器人进行足球赛,是当前人工智能和机器人领域的研究热点之一。
机器人足球比赛的设想首先是由加拿大不列颠哥伦比亚大学的教授AlanMackworth 在1992 年的论文《On Seeing Robots》中提出的。
仿真机器人世界杯足球赛攻防战术的研究
仿真机器人世界杯足球赛攻防战术的研究各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢RoboCup(RobotWorldCup),即机器人世界杯足球锦标赛。
它是国际上一项为提高相关领域的教育和研究水平而举行的大型比赛和学术活动,通过提供一个标准任务来促进分布式人工智能、智能机器人技术、及其相关领域的研究与发展。
训练和制造机器人进行足球赛,是当前人工智能和机器人领域的研究热点之一。
在比赛中,当确定了球队的阵型后,每个队员分配了相应的角色,开始讨论球队的整体和局部攻防战术。
全队进攻战术全队进攻战术是指比赛中一方获得球后,通过队员之间的传递配合达到射门的目的而采用的配合方法。
与局部进攻战术相比较,全队进攻战术的进攻面比较广,参加进攻和快速反击等。
主要有边路进攻,中路进攻,快速反击等。
1、边路进攻:利用球场两侧地区发起进攻的方法叫做边路进攻。
边路进攻是全队进攻战术的主要形式之一,其主要特点是有利于发挥进攻速度,打破对方防线制造缺口。
2、中路进攻:中路进攻是利用球场中间区域组织的进攻,这种进攻虽然能直接射门,但难度最大,因为中路防守最为严密,突前的攻击手必须是反应极其敏锐,意识强而且技术高,敢于冒险,速度快和善于路位策应的队员。
3、快速反击:比赛中当攻方进攻时,后卫线往往压至中场附近,防守人数也由于插上进攻和助攻而相对减少,此时抓住对方防区空隙比较大和回防较慢的机会,趁其失球发动快速反击,往往能取得良好的效果,快速反击是最有威胁的进攻手段,有效发动快速反击。
能有效得分,但其有一定的冒险性。
所以要掌握准确快速的原则。
配合要有组织性,要非常有默契,需要多次练习。
否则很难在比赛中实施。
全队防守战术防守战术可分为两种基本类型:盯人紧逼防守(人盯人防守),即在规定的范围内盯人紧逼,不交换看守:区域紧逼防守(盯人和区域相结合),即现今流行的综合防守,紧逼和保护相结合,在个人的防区内紧逼,作交替看守。
盯人防守即各自都有明确的防守对象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RoboCup仿真机器人11:112D足球比赛
1、仿真比赛环境(服务器端):
服务器(Soccer Server)采用与2007全国机器人大赛一致的10.0.7版本,由比赛委员会发布。
2、比赛方式
比赛允许手动启动。
为了能同国际比赛一致,本次比赛只接受Linux 平台下的队伍。
比赛结束后,所有参赛队伍的可执行码必须发布。
3、比赛安排
待定。
4、比赛积分规则
4.1 积分规则:
胜一场得三分、平一场的一分,负一场的零分
4.2 平分处理:
在循环赛阶段,如果两个或两个以上的球队出现了积分相同的情况,则首先比较
净胜球,如相同则比较进球数,如再相同则以相互成绩决定名次。
在淘汰赛阶段遇到平局,则进行加时赛,仍然平局则点球决定胜负。
如果有一方不能正常进行点球,则能进行的一方胜;如果双方都不能正常进行点球决战,则重赛一场。
5.抛球(drop-ball)处理
在一些情况下,如发任意球或界外球,比赛是处于停止状态的。
如果球队在规定的发任意球时间内不能将球发出,服务器将在200个周期后自动执行抛球(drop-ball)命令。
如果某支球队反复的出现发任意球时没有球员发球,甚至没有球员向球移动试图
发球,则裁判可以适当的通过手动抛球(drop-ball)命令缩短比赛的等待时间。
这
样做的目的是,在保证参赛球队有公平的机会行使他们的权利的同时,确保比赛尽可能流畅的进行。
如果比赛在play_on状态下,没有任何一个球员向球移动,裁判可以在200个周期后抛球(drop-ball)。
在抛球(drop-ball)的时候,裁判应该将球放在离球的当前位置尽可能近的地方。
如果在禁区内出现抛球(drop-ball)的情况,则应该将球放在禁区的角上。
6.代码要求
6.1教练信息
教练可以在比赛处于非play_on状态时,发出任意格式的消息。
教练每隔30秒钟可以发送一个建议、一个信息和一个定义,其余的消息将被服务器忽略。
因此,教练每30秒钟发送的指示不要超过4个,以免加重网络负担。
6.2犯规
绝大多数情况下服务器会自动的进行任意球和界外球的判罚。
然而,有些犯规情况只能由人类裁判识别,并由他判罚给被犯规球队任意球。
符合下列情况视为犯规:
如果一支球队将球围住,以至于其他球队队员无法踢到球;
如果球门被许多球员挡住,以至于无法进球(粗野的防线:将球员排成人墙挡住球门);
如果一支球队试图挡住对方球员的运动;
守门员的移动次数被限制在2次。
守门员可能会轻踢一脚球,然后再次抱球,这样会又获得两次移动机会。
这种情况只能允许发生一次,我们要求人类裁判将球放在最近的禁区角上;
任何其它的被比赛委员会认定的违反公平竞赛的行为都可以被成为犯规。
7.竞赛公平性:
比赛的进行参照了现实足球的公平性和比赛规则,同时还受到服务器虚拟的仿真环境的约束。
任何不受约束的行为都被视为违背了公平竞赛的承诺,这在比赛中是严格禁止的。
违反竞赛公平的行为如下:
使用其他球队的可执行代码参加比赛;
球队每个周期给每名球员发送超过三个或四个指令,造成服务器(仿真比赛环境)阻塞;
球队使用其他的方式,如进程间的直接通讯来进行球员间的通讯,而不是通过服务器使用’say’命令;
一方球队试图通过记录并发送从前的通讯内容或者模仿对方球队的通信来扰乱对方球队的正常通讯。
上述的任何一种行为都是被严格禁止的。
其它的策略一旦被比赛委员会发现并磋商认定的,也将被视为违反公平竞赛原则。
特别是,如果向对方球员实施破坏性的操作或者通过其它的并非服务器提供的方式获得优势利益的,将被看作是不公平竞赛。
然而,我们希望每一支球队都能像公平竞争球队应该的那样透明。
如果你对使用某些方法有疑问,请在比赛之前向比赛委员会询问。
如果一旦发现某支球队在比赛中使用了有违公平的方法,那么将立即取消该队的参赛资格。
如果某支球队被怀疑违反了公平竞赛的规则,比赛委员会有权索取其源代码检查。
8. 以上就是本次比赛2D仿真组的比赛规则,请参见:获得更多信息。
9. 本次比赛最终解释权归比赛委员会所有。