森瑟尔数字传感器通讯协议
《水资源监测数据传输规约》V1.1版20121009
总则 .............................................................................. 3 数据报文传输规约 .................................................................. 3 5.1 5.2 5.3 帧结构 ........................................................................ 3 链路传输 ..................................................................... 10 物理层规约 ................................................................... 12
3 3.1
术语、符号和代号 术语 GB/T 50095、SL 26等界定的以及下列术语和定义适用于本文件。
3.1.1 终端地址 terminal address 系统中终端设备的地址编码。亦称测站地址。 3.1.2 中继站地址 relay station address 系统中用于中转数据和监控命令的中继站的地址编码。 3.1.3 报文 report text 系统中交换与传输的完整数据信息。 3.1.4 启动站 initiative station 一次报文传输过程,主动发出报文的站。
国家水资源监控能力建设项目标准
SZY206-2012
水资源监测数据传输规约
Data transmission protocol for monitoring system
2012-09-10 发布
sension7台式电导率使用说明书
1.2 键盘介绍............................................................................................................ 13 1.3 屏幕区域和图标.................................................................................................. 15 1.4 声音信号............................................................................................................ 17
3
3.6.1 测量低水平电导率...................................................................................... 32 3.7 操作注意事项..................................................................................................... 33 3.8 常规转化因子..................................................................................................... 34 3.9 电导测量理论..................................................................................................... 34
知识分享-汽车网络技术

大众速腾动力总线系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
大众速腾舒适总线系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
6
大众速腾网络系统
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
汽车网络系统分类
SAE车辆通信与控制委员会将汽车数据传输 网划分为A、B、C、D四类。 A类是面向传感器/执行器控制的低速网络, 数据传输位速率通常小于10kb/s; B类是面向独立模块间数据共享的中速网络, 位速率一般在10kb/s到125kb/s之间; C类是面向高速、实时控制的多路传输网, 位速率在125kb/s到1Mb/s之间; D类主要用于信息与多媒体系统网络,通信 速率大于1Mb/s。
版权所有 © 浙江吉利汽车研究院有限公司
Copyright Reserved © Geely Automobile Research Institute
汽车电子网络技术
汽车电子网络技术是现代汽车电子技术的重要 组成部分,是现代汽车通信与控制的基础。 就像汽车电子技术在20世纪70年代引入集成 电路、80年代引入微控制器一样,近10多年来数 据总线技术的引入也将是汽车电子技术发展的一 个里程碑。
MR13温控表通讯协议(中文)

g: 数据⑾:
W指令后,插入数头符“,”代表改写一个参数
数头符 第一数据
“,” 1 2 3 4
例: 仅一个参数的写 W03000,****( 参数) e:响应代码⑹⑺:
正常响应码为”00”。 参看5-5响应码说明。
(4)基本格式2说明 h:结束符 表示文件的结束 以 ETX(03H) 或 “:”(3AH)表示 i:两位BCC(二进制块)码 说明: MR13[1-19B]窗口设置BCC块校验方式:
★ 用户可用Windows 环境下的WORDS的"PRINT"打印指令检查或打印MR13.doc 文件内容。
2.通讯口的技术数据
1. 信号电平: 2. 通讯方式:
3. 同步系统: 4. 通讯距离:
5. 通讯速度: 6. 传输保护: 7. 数据格式:
EIA标准 RS-232C,RS-485 RS-232C 3线半双工,单台 白RS-485 2线半双工,多台 起始位-停止位同步系统 RS-232C 15 米 RS-485 500 米 (具体视通讯条件而定) 1200,2400,4800,9600,19200 波特率 无保护 数据7位,1位偶校验位,1位停止位
3. 调节器通迅接线 3.1 RS-232C
上位机RS232C 9针连接器
数据发送 SD 3 数据接收 RD 2 信号地 GND 5
RD 3数据接收 SD 2数据发送 SG 7信号地
RS232接口,只能单台点对点的通迅,不能进行总线的并联。
3.3.485接口连线形式: 上位机RS232C 9针连接器
数据发送 SD 3 数据接收 RD 2 信号地 GND 5
希曼顿 RS232/RS485转换器
1 RXD 数据接收 数据发送/接收高 TR + 10
西门子 sitrans LR460 说明书

免责申明 虽然我们对手册内容是否与仪表描述一致进 行了核对,但仍可能存在变动。这样我们不 能确保完全一致。手册内容会被有序的核查 并纠正,勘误表登录在后续版本里。我们欢 迎用户提出各种改进建议。 技术数据可能有变动
MILLTRONICS®是 Siemens Milltronics Process Instruments Inc.的一个注册商标。 可通过下列地址联系 SMPI 技术出版部:
通过手操器快速启动精灵................................................................28 通过SIMATIC PDM快速启动精灵............................................................30 设备描述(DD)........................................................................30 快速启动步骤..........................................................................31 物位应用举例..............................................................................34 自动虚假回波抑制..........................................................................35
SITRANS LR460...........................................................................5
SEN - Sentry G3 Modbus通讯介绍_CN
6. ModScan32读数与G3显示对比
Contact Information
Condition Monitoring Solutions
Joe Chin
Managing Director
Sensonics (China) Limited
Room 603, 336 East Xietu Road, Shanghai 200011, China Tel: +86-21-53077189 Fax: +86-21-53071679 Mobile: +86-13916555847 zhenggang.qin@
推荐Modbus RS485 通讯形式 Sentry G3 + MGate
– 经济、灵活 – MGate轨道安装
Sentry G3 + MGate工作举例
测试软件:ModScan32 1. PC机IP地址设置
2. MGate设备搜索
3. MGate 操作模式选择
4. MGate 串口设置
5. ModScan32连接
G3 Modbus应用
HMI人机界面
– 用户应用级 – 外接Modem设备,转换成Modbus TCP/IP
系统集成商
– 上位机程序直接读取Modbus RTU – Honeywell , Triconex…
Sentry G3 Modbus
Modbus Slave接口(双Modbus)
MBUS+和MBUS-,两线制接线
Sentry G3 – Modbus通讯
2011年2月
英国胜索尼有限公司简介
英国胜索尼有限公司1972年成立于英国,有 近40年的设计、制造和安装机械设备和装置状态 监测和保护仪表的经验。
磁阻式角度传感器

Rotating shaftMR-sensor set-up磁阻角度传感器系统恩智浦的磁阻传感器技术是汽车测量系统领域中的上好之选。
不易磨损、长期稳定性以及直接测量的特性共同打造出一款精确、强劲的传感器。
从单芯片传感器、相应的信号调节ICs到整合的单封装解决方案,恩智浦出产的角度传感器物美价廉,可以满足您多方面的应用需求。
恩智浦生产的磁阻(MR)角度传感器具有许多技术方面的优势,它能够为汽车制造商提供更可靠、更准确的汽车测角解决方案,从而减少机械故障所引发的危险,改善车辆整体的安全性能。
随着汽车电子领域更多的采用先进的X-by-wire车内网络系统和控制系统,诸如:FlexRay,而这些控制系统无一例外的需要更加精确的测量数据,由此,这项技术的重要性也随之不断提高。
主要优势● 无触点测角,最大可达180°● 测量不受使用寿命和温度变化引起的磁漂移影响●热应力引起的机械公差以及磁体错位的影响不会对操作产生影响● 足够高的温度范围● 汽车行业资格认证● 高度灵活的解决方案,可以有效测量任何汽车角度●在漫长的生命周期中始终保持稳定运行主要应用领域● 电子节气门控制(ETC )● 可变气门控制(VVC )● 踏板与雨刮定位● 主动式减震系统● 自动前照灯光束调整● 电子转向系统●座椅定位MR传感器利用磁场来对重置价值和传感器进行测量。
这种无触点的原理实现了所有旋转组件的相互绝缘,从而使得整个传感系统在污染和机械损伤情况下长期保持强效运作。
此外,MR传感器只对磁场方向进行测量,并不计算磁场强度。
这样,即使在老化、机械损伤或磁体变温误差等引发场强变化的情况下,MR 传感器依然可以正常工作。
KMZ4x 与 UZZ900x 磁阻角度传感器KMZ41/KMZ43及UZZ900x恩智浦生产的KMZ41与KMZ43传感器桥接条包含8个MR电阻线圈,两个传感器以独立的惠斯通电桥形式在同一平面连接构成45度角。
森瑟836-2-LA铁路机车专用加速度传感器使用手册说明书
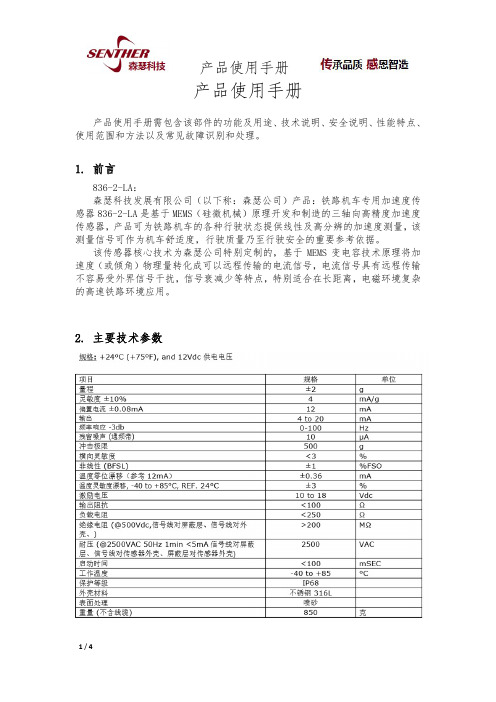
产品使用手册产品使用手册需包含该部件的功能及用途、技术说明、安全说明、性能特点、使用范围和方法以及常见故障识别和处理。
1.前言836-2-LA:森瑟科技发展有限公司(以下称:森瑟公司)产品:铁路机车专用加速度传感器836-2-LA是基于MEMS(硅微机械)原理开发和制造的三轴向高精度加速度传感器,产品可为铁路机车的各种行驶状态提供线性及高分辨的加速度测量,该测量信号可作为机车舒适度,行驶质量乃至行驶安全的重要参考依据。
该传感器核心技术为森瑟公司特别定制的,基于MEMS变电容技术原理将加速度(或倾角)物理量转化成可以远程传输的电流信号,电流信号具有远程传输不容易受外界信号干扰,信号衰减少等特点,特别适合在长距离,电磁环境复杂的高速铁路环境应用。
2.主要技术参数3.电气连接图4.产品结构图和尺寸5.安全注意事项该传感器为低压供电,供电对人体无伤害。
该传感器为矢量传感器-加速度具有方向性,使用上为需要注意安装的方向以及三个方向的相对性,并需要在采集端对三个信号加以区分。
该加速度传感器为森瑟公司定制部件,随货出厂有传感器的标定证书,包含零点,灵敏度,频率等测试参数。
标定证书遗失可以联系工厂凭序列号可以免费重新打印一次。
后续传感器参数重新标定可以按照1000RMB/轴的费用进行服务。
安装方面需要带扭力显示的内六角扳手,M10X18mm不锈钢安装螺栓。
选配安装零件有:绝缘垫圈,止动垫,绝缘板等。
用户日常检测可以使用直流电源,高精度万用表,高压测试台等实验室设备进行,不作为供货零件。
硅脂,黄油或者蜜蜡等安装填充剂为易耗物料,建议用户选其中一种长期配备,使用后建议使用工业酒精进行清理。
传感器如需要报废处理,建议退回厂家进行拆解并归类回收,避免直接遗弃。
传感器出厂时会有专业的抗冲击包装,在转运和存储当中应使用原包装进行保存。
在安装或者进料检验过程当中临时放置应用海绵保护传感器头部,应避免硬物直接碰撞或者跌落撞击。
N-40NTX93、TX93、TX94和TX95传感器传输器说明书
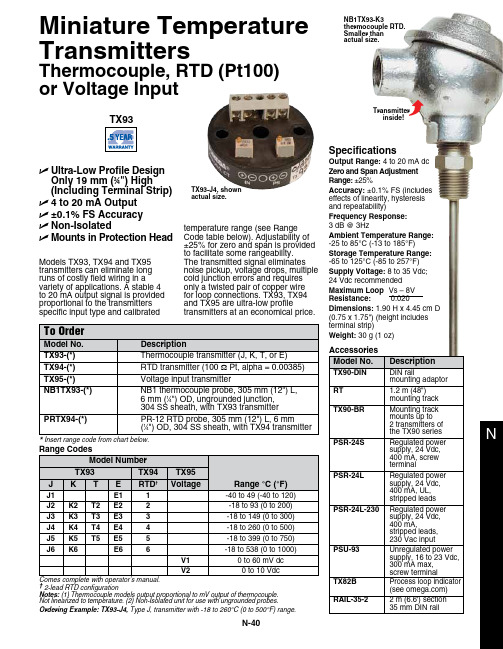
N-40NModels TX93, TX94 and TX95 transmitters can eliminate long runs of costly field wiring in a variety of applications. A stable 4 to 20 mA output signal is provided proportional to the transmitters specific input type and calibratedtemperature range (see Range Code table below). Adjustability of ±25% for zero and span is provided to facilitate some rangeability. The transmitted signal eliminates noise pickup, voltage drops, multiple cold junction errors and requires only a twisted pair of copper wire for loop connections. TX93, TX94 and TX95 are ultra-low profiletransmitters at an economical price.U Ultra-Low Profile Design Only 19 mm (3⁄4") High (Including Terminal Strip)U 4 to 20 mA Output U ±0.1% FS Accuracy U Non-IsolatedU Mounts in Protection HeadInsert range code from chart below.TX93-J4, shown actual size.Transmitter inside!Miniature Temperature Transmitters† 2-lead RTD configurationNotes: (1) Thermocouple models output proportional to mV output of thermocouple. Not linearized to temperature. (2) Non-Isolated unit for use with ungrounded probes.Ordering Example: TX93-J4, Type J, transmitter with -18 to 260°C (0 to 500°F) range.SpecificationsOutput Range: 4 to 20 mA dc Zero and Span Adjustment Range: ±25%Accuracy: ±0.1% FS (includes effects of linearity, hysteresis and repeatability)Frequency Response: 3 dB @ 3HzAmbient Temperature Range: -25 to 85°C (-13 to 185°F)Storage Temperature Range:-65 to 125°C (-85 to 257°F)Supply Voltage: 8 to 35 Vdc; 24 Vdc recommended Maximum Loop Vs – 8V Resistance: 0.020Dimensions: 1.90 H x 4.45 cm D (0.75 x 1.75") (height includes terminal strip)Weight: 30 g (1 oz)NB1TX93-K3thermocouple RTD. Smaller than actual size.Thermocouple, RTD (Pt100) or Voltage Input。
重要TSic系列高精度温度传感器应用
TSic 系列高精度温度传感器的应用作者:陈拓 chentuo@ 2011911. 产品介绍TSic 是 IST(Innovative Sensor T echnology IST AG)公司的传感器 IC 产品。
IST是 Endress+Hauser Group 集团下的一家公司,总部设在瑞士西北部的赖纳赫(Reinach) 。
Endress+Hauser 集团是为工业过程工程提供测量仪表服务和解决方案的全球领导者之一, 旗下的 IST公司的产品是各种温度、湿度和流量传感器。
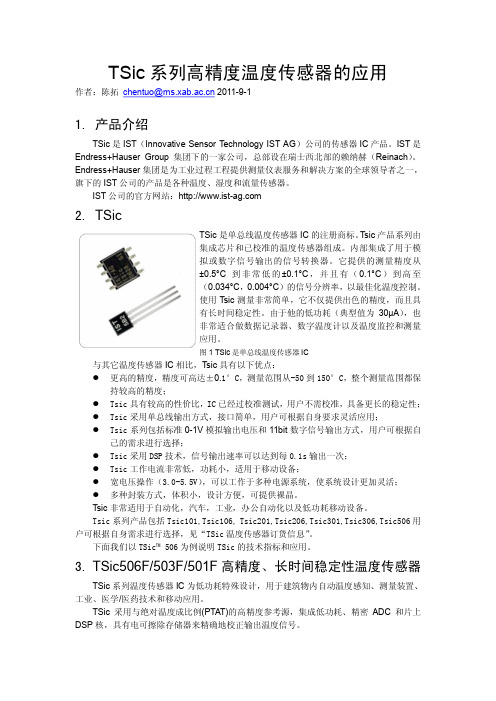
IST公司的官方网站:http://www.ist2. TSicTSic 是单总线温度传感器 IC的注册商标。
T sic 产品系列由集成芯片和已校准的温度传感器组成。
内部集成了用于模拟或数字信号输出的信号转换器。
它提供的测量精度从±0.5°C 到非常低的±0.1°C,并且有(0.1°C)到高至(0.034°C,0.004°C)的信号分辨率,以最佳化温度控制。
使用 T sic 测量非常简单,它不仅提供出色的精度,而且具有长时间稳定性。
由于他的低功耗(典型值为 30μA) ,也非常适合做数据记录器、数字温度计以及温度监控和测量应用。
图1 TSic是单总线温度传感器IC与其它温度传感器 IC相比,T sic 具有以下优点:l更高的精度,精度可高达±0.1°C,测量范围从-50到 150°C,整个测量范围都保 持较高的精度;l Tsic 具有较高的性价比,IC 已经过校准测试,用户不需校准,具备更长的稳定性;l Tsic 采用单总线输出方式,接口简单,用户可根据自身要求灵活应用;l Tsic 系列包括标准 01V 模拟输出电压和 11bit 数字信号输出方式,用户可根据自 己的需求进行选择;l Tsic 采用 DSP 技术,信号输出速率可以达到每 0.1s输出一次;l Tsic 工作电流非常低,功耗小,适用于移动设备;l宽电压操作(3.0-5.5V),可以工作于多种电源系统,使系统设计更加灵活;l多种封装方式,体积小,设计方便,可提供裸晶。
超声波uss协议
超声波uss协议超声波USS协议是一种用于实现超声波传感器与主控板之间通信的协议。
它主要用于测量目标物体与传感器之间的距离,并将测量结果传输给主控板。
本文将介绍USS协议的基本原理、通信过程、应用场景以及一些注意事项。
一、USS协议的基本原理超声波USS(Ultrasonic Sensor System)是一种主要用于距离测量的传感器系统。
它通过发射超声波脉冲,然后接收反射回来的超声波信号,通过测量信号的时间差来计算目标物体与传感器之间的距离。
USS协议是一种用于传输超声波测量数据的通信协议,它定义了数据的格式、传输方式以及相关参数。
二、USS协议的通信过程USS协议的通信过程分为初始化、测量和数据传输三个阶段。
1. 初始化阶段:主控板发送初始化指令给超声波传感器,以准备进行距离测量。
初始化指令中包含了一些配置参数,如超声波脉冲的频率和测量范围等。
2. 测量阶段:超声波传感器接收到初始化指令后,开始发射超声波脉冲。
脉冲经过空气传播到目标物体,并被目标物体反射回传感器。
传感器接收到反射回来的超声波信号后,记录下接收到信号的时间戳。
3. 数据传输阶段:传感器将测量得到的时间戳通过USS协议进行编码,并将编码后的数据传输给主控板。
主控板接收到数据后,解码得到时间戳,并通过一定的算法计算出目标物体与传感器之间的距离。
三、USS协议的应用场景USS协议广泛应用于各种需要进行距离测量的场景,如智能车辆导航、无人机避障、工业自动化等。
在智能车辆导航中,超声波传感器可以用于检测前方障碍物的距离,以避免碰撞。
在无人机避障中,超声波传感器可以用于检测周围环境的距离,以避免与障碍物相撞。
在工业自动化中,超声波传感器可以用于检测物体的位置和距离,实现精确的控制和定位。
四、USS协议的注意事项在使用USS协议进行超声波测量时,需要考虑以下几点注意事项:1. 确保传感器与目标物体之间没有遮挡物,以保证测量的准确性。
2. 根据实际场景和需求,选择合适的超声波传感器和配置参数。
欧瑞森Orion136-174MHz双频扫描手机通讯设备维修手册说明书
LBI-39172Maintenance ManualORION™136-174 MHz (Dual Bandwidth) SCAN AND SYSTEMMOBILE RADIOTABLE OF CONTENTSSynthesizer/Receiver/Exciter . . . . . . . LBI-39173Power Amplifier . . . . . . . . . . . . . . LBI-39002PA Interface . . . . . . . . . . . . . . . . LBI-38994 Control Logic/IF Board . . . . . . . . . . LBI-39174 Control Units . . . . . . . . . . . . . . . LBI-38992 Assemblies . . . . . . . . . . . . . . . . LBI-38909 Service Section . . . . . . . . . . . . . . LBI-39175ericssonz Ericsson Inc.Private Radio SystemsMountain View RoadLynchburg, Virginia 245021-800-528-7711 (outside USA, 804-528-7711)Printed in U.S.A.Copyright© October 1993 Ericsson GE Mobile Communications Inc.ContinuedSPECIFICATIONS*Frequency Range:136-153 MHz 150-174 MHzBattery Drain:ReceiverSquelched 1.1 Amperes at 13.8 V oltsUnsquelched 3.0 Amperes at 13.8 V olts (15 Watts Output)Transmitter25 Watts 12 Amperes at 13.2 V olts 50 Watts 14 Amperes at 13.6 V olts 110 Watts28 Amperes at 13.4 V oltsFrequency Stability:0.0002% depending on modelTemperature Range:-30° C (-22° F) to +60° C (+140° F)Duty Cycle:100% Receive, 20% Transmit TransmitterTransmit Output Power:25W/50W/110WConducted Spurious:-85 dBModulation:±5 kHz (30 kHz channel spacing)±2.5 kHz (12.5 kHz channel spacing)Audio Sensitivity:55 to 110 millivoltsAudio Frequency Characteristics:Within +1 dB to -3 dB of a 6 dB/octave pre-emphasis 300Hz and within +1 dB to -4.5 dB (+1 to -3 dB for Euro) of a 6 dB/octave pre-emphasis 3000 Hz per EIA standards.Post-limiter filter per FCC and EIA.Distortion:Less than 2% (1000 Hz)Deviation Symmetry:0.3 kHz maximum (30 kHz channel spacing)±0.15 kHz (12.5 kHz channel spacing)Maximum Frequency Separation:136-153 MHz, 17 MHz 150-174 MHz 24 MHz Microphone Load Impedance:600 OhmsPower Adjust Range:100% to 50% of rated power (U.S.A. Models)100% to 24% of rated power (Euro Models)RF Output Impedance:50 OhmsFM Noise:50 dB (30 kHz channel spacing)45 dB (12.5 kHz channel spacing)ReceiverAudio Output:15 Watts with less than 3% distortion(To 4.0 ohm speaker)Sensitivity:0.35 µV (STD)12 dB SINAD (IEIA method)Selectivity:EIA Two-Signal Method (30 kHz Channels) (12.5 kHz Channels)-90 dB (STD)-70 dB (STD)This manual is published by Ericsson Inc., without any warranty. Improvements and changes to this manual necessitated by typographical errors, inaccuracies of current information, or improvements to programs and/or equipment, may be made by Ericsson Inc., at any time and without notice. Such changes will be incorportated into new editions of this manual. No part of this manual may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, for any purpose, without the express written permission of Ericsson Inc.LBI-391721DESCRIPTIONThe synthesized ORION mobile radio combinations are completely solid-state, utilizing microcomputer technology and integrated circuits to provide high-quality, high-reliabil-ity radios. Standard combinations may be equipped with:•Microcomputer Controlled Frequency Synthesizer•Up to 16 Channels•0.0002% Frequency Stability•Other Structured OptionsThe basic radio consists of three printed wiring boards mounted in a cast aluminum frame. The three boards are:1.The Control Logic/IF board,2.The Frequency Synthesizer/Receiver/Exciter board,3.The Power Amplifier board.The radio is of double-layer construction with tuning ad-justments easily accessible from the top of the radio.The Control Logic/IF Board located on the top of the ra-dio, while the Power Amplifier and the Synthesizer/Re-ceiver/Exciter boards are located on the bottom.SYNTHESIZER/INTERCONNECTThe synthesizer consists of a microcomputer, E lectricallyE rasable P rogrammable R ead O nly M emory (EEPROM), afrequency synthesizer IC, transmit and receive V oltage C on-trolled O scillator’s (VCO) and associated circuitry. The fre-quency synthesizer under control of the microcomputergenerates all transmit and receive R adio F requencies (RF).The EEPROM stores binary data for all radio frequen-cies, Channel Guard tones/digital codes and the timing func-tion of the C arrier C ontrol T imer (CCT). Themicrocomputer accesses the EEPROM and provides the cor-rect W ALSH bits to the Channel Guard circuitry to generatethe correct Channel Guard tone or digital code on a per-channel basis.PROGRAMMINGThe EEPROM allows the radio to be programmed or repro-grammed as needed to adapt to changing system requirements.Radio Frequencies, Channel Guard tone and digital codes andthe CCT function can be reprogrammed.The EEPROM can be reprogrammed through the radiofront connector using a personal computer. This programmerallows all information to be loaded simultaneously.Programming instructions are provided in the respectiveProgrammer Maintenance Manuals.TRANSMITTERThe transmitter consists of the exciter, frequency synthe-sizer, transmitter VCO and a P ower A mplifier (PA) assembly.The PA assembly consists of a PA board mounted on a heatsink assembly. The PA board also contains an antenna switch-ing diode and a low-pass filter.Audio and Channel Guard circuitry for the transmitter is lo-cated on the Logic Board.RECEIVERThe receiver consists of the frequency synthesizer, RXVCO, injection amplifiers, front end, IF and limiter detector.Audio, squelch and Channel Guard circuitry for the receiver islocated on the Logic Board.LOGIC FUNCTIONA microprocessor on the Control Logic/IF board controlsthe frequency synthesizer, the TX ON/OFF, the decoding ofCTCSS tones, the generation of CTCSS tones,... etc. The audioprocessor circuitry of the transmitter and the receiver are lo-cated on the Control Logic/IF Board. Squelch circuitry and aconnection to the digital AEGIS circuit is also located on theControl Logic/IF Board.OPERATIONComplete operating instructions for the ORION Two-WayRadio are provided in Operator’s Manual LBI-38888 for thecontrol unit used.MAINTENANCEThe Service Section in maintenance manual LBI-39175contains the maintenance information to service this radio. TheService Section includes:•Dissassembly Procedures•Replacement of IC’s, chip capacitors and resistors•Alignment procedures for the transmitter and receiver•Troubleshooting Procedures and wave formsFigure 1 - ORION Mobile RadioSPECIFICATIONS* - Cont. Receiver - Cont.Spurious Response:-100 dB (STD)Intermodulation 30 kHz:(30 kHz Channels) (12.5 kHz Channels)-80 dB (STD) -70 dB (STD)Maximum Frequency Separation:136-153 MHz .... 17 MHz150-174 MHz .... 24 MHzFrequency Response:(30 kHz Channels)Within +1, -3 dB of 6 dB/octave de-emphasis from 300 to3000 Hz (1000 Hz reference)(12.5 kHz Channels)Within +1, -3 dB of 6 dB/octave de-emphasis from 300 to2500 Hz (1000 Hz reference)RF Input Impedance:50 OhmsHum/Noise ratio:Unsquelched-50 dBSquelched-70 dBChannel Spacing:30/12.5 kHzThe following equipment authorized numbers have been granted:COUNTRY REGULATORY APPROV ALUNITED STATES FCC AXATR - 340-A2 (30/50W)AXATR - 341-A2 (110W)CANADA DOC TR - 340 (30/50W)*These specifications are intended primarily for use of the service technician. Refer to the appropriate Specifications Sheet for the complete specifications.LBI-391722SYSTEM INTERCONNECTION DIAGRAMLBI-39172 Array U.S.A. LOW POWER3LBI-39172SYSTEM INTERCONNECTION DIAGRAMU.S.A. HIGH POWER4SYSTEM INTERCONNECTION DIAGRAMLBI-39172EUROPEAN5。
美国Smartsensor 125微波车辆检测器技术方案
美国Smartsensor 125微波车辆检测器技术方案一、概述智能交通系统主要任务是使交通更安全、更有效率、更可靠、更环保、更节省时间更节省成本。
它包括传感技术和控制系统、先进的通讯手段和计算机信息。
为了协助交通界能够更完美的实现这个目标,美国Wavetronix公司专为 ITS行业研发出一种目前国际上技术最为领先的交通车辆检测器——Smartsensor 125数字双雷达波车辆检测器!采用了革命性的数字双雷达系统,彻底解决了现有市场上微波车检不能精确检测每辆车的速度、车长、类型等功能,HD微波车辆检测器检测精度与线圈检测器精度不相上下,甚至更好;HD微波车辆检测器是目前真正能取代线圈检测器的唯一微波车检,广泛应用于高速公路、城市道路、桥梁等进行全天候的交通检测,能够精确的检测高速公路上的任何车辆,包括从摩托车到多轴、高车身的车辆,拖车作为一辆车检测。
这种微波检测器可安装在路侧的灯杆上或专门的立柱上,当车辆通过微波发生装置发射的雷达波区域时对车辆进行检测;来自传感器的信号由微处理器进行预处理,并将处理后的数据通过综合通信网上传至监控中心或存储在本地。
产品技术优势1、享有专利权的数字双雷达波检测技术,与模拟波不同,它每1s发射100万次雷达波可以精确定位车辆,同时可以跨越中央隔离带的防眩板、树丛及隔离护栏等障碍检测到部分被遮挡的车辆,从而大大降低了隔离带对检测精度的影响!2、在一些高速公路或桥梁上,有的路段无法提供3米以上的侧移量,Smartsensor 125则可以解决这一问题,因为它只需要1.8的侧移量,就可以检测所要检测的数据。
3、Smartsensor 125微波车辆检测器可以检测双向10个车道的交通数据,包括车流量、单车速度、平均速度、车型分类、车道占有率等交通数据。
它内部设有两个数字雷达,在检测路面上投映两个微波带,每当车辆经过时,它会根据车辆通过两个雷达的时间精确地计算出每辆车的速度及其它所检测到的交通数据,还可以在管理软件中看到实时的数据。
横河Sushi传感器和LoRaWAN无线通信协议

横河Sushi传感器和LoRaWAN无线通信协议Wireless Sushi Sensor and LoRaWAN Wireless Communication Protocol••昆明有色冶金设计研究院••方原柏•Fang•Yuanbai摘 要:横河电机开发的sushi传感器是一种小型无线传感器,它可通过早期设备异常迹象的检测,帮助改善设备维护并防止故障。
sushi传感器所收集的数据通过LoRaWAN低功耗广域无线网络、云端及智能手机进行工业物联网通信,实现工业物联网的低初始成本和低维护成本的运行,是提高企业生产效率和维护水平的有效解决方案。
本文介绍了开发背景、sushi传感器、LoRaWAN无线数据通信协议和安全设定。
关键词:横河电机•••无线通信系统•••健康状态检测设备•••sushi传感器•••LoRaWAN Abstract:•Yokogawa•wireless•sushi•sensor•is•a•small•wireless•sensor,•which•can•help•improve•equipment•maintenance•and•prevent•failure•by•detecting•abnormal•signs•of•early•equipment.•The•data•collected•by•wireless•sushi•sensor•communicates•with•industrial•Internet•of•things•through•LoRaWAN•low•power•wide•area•wireless•network,•cloud•and•smart•phone,•realizing•the•operation•of•industrial•Internet•of•things•with•low•initial•cost•and•low•maintenance•cost,•which•is•an•effective•solution•to•improve•the•production•efficiency•and•maintenance•level•of•enterprises.•This•paper•introduces•the•development•background,•wireless•sushi•sensor,•LoRaWAN•wireless•data•communication•protocol•and•security•settings.Key words:•Yokogawa•••Wireless•communication•system•••Health•detection•equipment••Wireless•sushi•sensor•••LoRaWAN•【中图分类号】TN91•【文献标识码】B••文章编号1606-5123(2019)05•-0049-031 开发背景日本横河电机(Yokogawa)公司于2018年3月宣布,将向国际市场推出sushi传感器,它是OpreX品牌阵容中的一种无线解决方案,已经在日本市场销售,2019年3月将登陆欧洲市场进行销售。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线路设备——传感器485传输协议V2.02.821 1.技术指标Ø输入电压(VDC):8~26Ø波特率(bps):9600Ø传感器接口类型:RS485Ø工作温度(℃):-40~85Ø其它技术参数按合同要求制作2.帧结构表1-1 帧结构定义帧头报文长度传感器类型通讯地址帧类型报文类型报文内容校验位2 Bytes 2 Bytes 1 Byte 1 Bytes 1 Byte 1 Byte 变长1Byte表1-1各参数定义如下:a)帧头:固定为0xBB71。
b)报文长度:指帧字节数(含帧头和校验位)。
c)通讯地址:RS485通讯地址,2个字节分配如下:第一个字节为传感器类型,定义如下:表1-2 传感器类型定义气象站双轴倾角传感器光纤盐密拉力传感器集成式拉力倾角温湿度气压传感器图像传感器0x01 0x02 0x03 0x04 0x05 0x06 0x10第二个字节为传感器地址字节,不同传感器系列可以具有相同的传感器地址字节。
d)帧类型:按功能对数据帧进行区分、标识,具体定义见下表。
表1-3 帧类型定义序号帧类型值含义1 0xAE(<<) 上传报文(设备←传感器)2 0xAF(>>) 下发报文(设备→传感器)e)报文类型:表1-4 报文类型定义序号 报文类型值 含义 备注1 0x01 设置地址2 0x02 查询地址 仅限于总线上只有一个同类型的传感器时使用3 0x03 设置工作方式4 0x04 查询工作方式5 0x05 读取即时数据6 0x06 读取平均数据 本规范版本仅对气象站有效注:对拉力、倾角、风速等传感器而言,存在零值标定和斜率校准等控制指令,这些指令只允许在出厂调试时使用,不允许设备运行过程中发送,因此在本文件中不进行规范。
f)报文内容:数据长度不定,具体定义参考第3节。
g)校验位:累加和校验,包括报文中除校验位外的所有报文数据,取末尾字节。
3.帧数据排列格式整形(占2bytes)、长整形(占4bytes),均采用高字节在前、低字节在后的方式存储。
除特殊说明,各传感器上传的采样数据均采用浮点数(占4bytes),采用高字节在前、低字节在后的方式存储。
4.数据报文格式4.1.1.设置传感器地址命令:0x01传感器地址设置报文格式见下表:表3-1 传感器地址设置报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x01(参见表1-4)7 报文内容 1 传感器新地址(1字节)8 校验位 1 累加和响应方式的数据报文格式见下表:表3-2 响应方式的数据报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000A3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x01(参见表1-4)7 报文内容 1 数据发送状态:①0xFF地址设置成功②0x00地址设置失败8 校验位 1 累加和示例:将拉力传感器的地址由0x01设置为0x05命令(16进制):BB 71 00 0A 04 01 AF 01 05 F0响应(16进制):成功设置:BB 71 00 0A 04 05 AE 01 FF ED (传感器地址为新地址)失败设置:BB 71 00 0A 04 01 AE 01 00 EA (传感器地址为原地址)4.1.2.查询传感器地址命令:0x02此命令用于不知道传感器地址的前提下进行,以广播地址方式发送。
在这种情况下,仅允许总线上挂接一只同类型传感器,以防数据出错。
查询传感器地址报文格式见下表:表3-3 查询传感器地址报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 1 广播地址:0xFF5 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x02(参见表1-4)7 报文内容0 空8 校验位 1 累加和响应方式的数据报文格式见下表:表3-4 响应方式的数据报文格式序号报文名称长度(Byte)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000A3 通讯传感器类型 1 参见表1-24 地址传感器地址 1 广播地址:0xFF5 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x02(参见表1-4)7 报文内容 1 传感器的实际地址8 校验位 1 累加和4.1.3.读取即时数据命令: 0x05读取即时数据报文格式见下表:表3-9 读取即时数据报文格式序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x05(参见表1-4)7 报文内容0 空8 校验位 1 累加和传感器接收到要求上传即时数据的报文后,立即进行测量,并将测试数据作为响应报文上传,响应的数据报文格式见下表:表3-10 读取即时数据的响应报文格式序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 因传感器而异3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x05(参见表1-4)7 报文内容不定因传感器而异,详见4.1.5.18 校验位 1 累加和补充,以下为工厂用命令。
●设置传感器工作方式命令:0x03主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x03(参见表1-4)7 传感器工作方式 1 传感器工作方式:①0x00-应答方式②0x01主动上传方式8 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x03(参见表1-4)7 数据发送状态 1 数据发送状态:0xFF①成功0x00②失败8 校验位 1 累加和●查询传感器工作方式命令:0x04主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x04(参见表1-4)7 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x04(参见表1-4)7 传感器工作方式 1 默认为0,即应答方式8 校验位 1 累加和●传感器零点校正命令: 0x0d主机命令发送格式:序号报文名称长度(Bytes)定义1 帧头2 帧头:0xbb712 报文长度 2 0x00093 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAF(参见表1-3)6 报文类型 1 0x0d(参见表1-4)7 校验位 1 累加和传感器返回格式:序号报文名称长度(Byte)含义1 帧头2 帧头:0xbb712 报文长度 2 0x000a3 通讯地址传感器类型 1 参见表1-24 传感器地址 15 帧类型 1 0xAE(参见表1-3)6 报文类型 1 0x0d(参见表1-4)7 数据发送状态 1 数据发送状态:0xFF①成功0x00②失败8 校验位 1 累加和4.1.5.1 拉力传感器上传数据中报文内容项的格式序号报文内容长度(Byte)含义7.1 拉力值 4 浮点数格式4.1.5.2 集成式拉力传感器上传数据中报文内容项的格式序号报文内容长度(Byte)含义7.1 拉力值 4 浮点数格式7.2 X轴倾角 4 浮点数格式7.3 Y轴倾角 4 浮点数格式5.485接口定义所有传感器的接口均采用5芯连接器(型号自定),连接电缆均采用屏蔽型。
连接器的端子定义如下表:序号 名称 描述 备注1 + A 485+ 外部接线2 - B 485- 外部接线3 GND 外部供电地 外部接线4 12V 外部供电正 外部接线5 BF 备用 外部接线特别说明:1、除上述指令外,在传感器生产过程中的其它参数配置、设置指令厂家可自定义(如零点校正指令等)。
2、传感器的工作方式默认为应答方式。
3、传感器加电后,空闲时间自动采集数据,并不断求取平均值。
当指令下发时,首先响应指令。
传感器在收到数据采集指令时,应上传最新的平均值,在下次数据采集周期内重新计算平均值(传感器每收到一次数据采集指令为一个数据采集周期)。