机械原理课件机械的平衡
《机械的平衡》课件

通过优化悬挂系统的设计 和参数,提高汽车的行驶 稳定性和乘坐舒适性。
机器人关节设计
优化机器人关节的结构和 运动轨迹,提高机器人的 灵活性和稳定性。
风力发电机齿轮箱
优化齿轮箱的设计和参数 ,提高风力发电机的效率 和可靠性。
06
机械平衡的发展趋势
新材料的应用
01
02
03
高强度材料
高强度材料如碳纤维、钛 合金等在机械平衡中的应 用,提高了设备的强度和 稳定性。
详细描述
旋转机械如电机、涡轮机等在工作时 ,如果转子不平衡,会导致振动和磨 损,影响机械性能和使用寿命。因此 ,需要对转子进行平衡测试和调整, 以确保其稳定运行。
往复机械的平衡
总结词
往复机械的平衡主要通过减震器和缓冲 装置来减小往复运动产生的冲击和振动 。
VS
详细描述
往复机械如内燃机、压缩机等在工作时, 往复运动会产生较大的冲击和振动,影响 机械性能和使用寿命。因此,需要采用减 震器和缓冲装置来减小冲击和振动,提高 机械的稳定性和可靠性。
力矩平衡是分析旋转机械和机构运动的重要方法之一。通过 力矩平衡,可以确定物体在旋转过程中的角速度、角加速度 以及受到的扭矩等参数。同时,力矩平衡也是设计各种旋转 机械和机构的重要依据。
惯性力的平衡
总结词
惯性力是指物体加速或减速运动时受到的力,其大小与物体的质量成正比,方向与加速度相反。惯性 力的平衡是指物体所受的惯性力在大小和方向上相互抵消,使物体保持匀速直线运动或静止状态。
02
平衡状态的表现
在平衡状态下,机械系统的所有质点和约束力均处于静止状态,没有加
速度和角加速度。
03
平衡状态的分类
平衡状态分为静态平衡和动态平衡两种类型。静态平衡是指系统在静止
机械原理 机械的平衡
优点: 简便易行 缺点: 要求两端轴颈直径相同.
机械原理第六章
14
2. 圆盘式静平衡架
优点: 一端可调, 可平衡两端轴颈不等的回转件; 缺点: 精度较低(总法向压力大---摩擦大;轴承易脏)
机械原理第六章
15
3. 转子许用不平衡重
有两种表示方法:
1)许用质径积[mr]; 用于单件生产的转子。
机械原理第六章
2
§6-2 刚性回转件的平衡
一. 分类---按不平衡的形式分
1.静不平衡
相对较薄( b 0.2D ),
可近似认为质量分布在同
一平面内, 各质点惯性力
共面.
s
* 特点
若不平衡, 则质心不在 P
回转轴线上, 在静止状态下
可完全表现出来
---对其平衡称静平衡.
机械原理第六章
D
b
3
2.动不平衡
, 可靠性
.
二.内容
1.回转件的平衡
第一临界速度
刚性回转件---转速低( n / nc1 0.7 ), 转子动挠度小;
挠性回转件---转速高, 转子动挠度大, 是近年发展起来的新课题;
2.整机的平衡 ---机器在机座上的平衡.
对含作往复运动和作平面复杂运动的构件,难以使其质心加速度 为0, 只能作整机研究.
P2
P1
mb
m1 r1
r2
r
r4
m2
m3 r3
m4
P3
在回转面内适当位置加上适当
配重,使其惯性力的合力等于0:
n
Pb Pi 0
i 1
《机械原理》课件机械的平衡
= 5.6kg
q bI = 6°
m bII
=
m
wW
II b
/ rbII
= 7.4kg
q bII = 145°
§63 刚性转子的平衡实验
一 静平衡实验
一 静平衡实验续
二 动平衡实验 动平衡机的工作原理示意图
§64 转子的许用不平衡量
转子要完全平衡是不可能的;实际上;也不需要过高要求 转子的平衡精度;而应以满足实际工作要求为度 为此;对不 同工作要求的转子规定了不同的许用不平衡量;即转子残余 不平衡量 许用不平衡量有两种表示方法: 1 用质径积mr单位g mm表示
2 用偏心距e 单位μm表示
e = mr/m
例:如图69所示;为一个一般机械的转子;质量为 70kg;转速n=3000r/min;两平衡基面Ⅰ Ⅱ至质心的距离 分别为a=40cm;b=60cm;试确定两平衡基面内的许用不平 衡量
解:因现在要平衡的是一个一般机械的转子;借助表61中典型转 子举例一栏的说明;可知应选用平衡等级G6 3;其平衡精度A=6 3mm/s 今转子角速度ω=πn/30≈0 1n=300rad/s;可求得许用偏心 距为
二 机械平衡的内容
1 绕固定轴回转的构件惯性力的平衡 1刚性转子的平衡 1静平衡:只要求惯性力达到平衡; 2动平衡:要求惯性力和惯性力矩都达到平衡 2挠性转子的平衡:转子在工作过程中会产生较大的弯曲 变形;从而使其惯性力显著增大 2 机构的平衡:对整个机构加以研究;设法使各运动构件 惯性力的合力和合力偶达到完全地或部分的平衡
2对于动不平衡的刚性转子;不论它有多少个偏心质量; 以及分布在多少个回转平面内;都只需在选定的两个平 衡基面内增加或除去一个适当的平衡质量;就可以使转 子获得动平衡双面平衡 3动平衡同时满足静平衡的条件经过动平衡的转子一 定静平衡;反之;经过静平衡的转子不一定动平衡
机械原理课件--第13章-机械的平衡
大型电机转子的动平衡试验
应用案例:
小型电机转子的动平衡试验
由于实验设备本身精度的影响,经过实验平衡的转子,实际上不可避免还存在一些残余的不平衡量。要想进一步减小其不平衡量,就得使用更精密的平衡装置和更高的平衡技术。但这意味着要提高生产成本,从合理降低生产成本而言,在满足使用要求的前提下,使用的平衡设备越简单越好。因此,根据工作要求,对转子规定一个适用的许用不平衡量是完全有必要的。
约掉公因式
很显然,回转件平衡后:
e=0
回转件质量对轴线产生的静力矩:
mge = 0
静平衡或单面平衡
该回转件在任意位置将保持静止:
从理论上讲,对于偏心质量分布在多个运动平面内的转子,对每一个运动按静平衡的方法来处理(加减质量),也是可以达到平衡的。问题是由于实际结构不允许在偏心质量所在平面内安装平衡配重,也不允许去掉不平衡重量(如凸轮轴、曲轴、电机转子等)。解决问题的唯一办法就是将平衡配重分配到另外两个平面I、II内。
一、质量分布在同一回转面内(静平衡)
平衡原理:在重心另一侧加上一定的质量,或在重心同侧去掉一些质量,使质心位置落在回转轴线上,使离心惯性力达到平衡。
适用范围:轴向尺寸较小的盘形转子(B/D<0.2),如风扇叶轮、飞轮、砂轮等回转件,
12-2 刚性转子的平衡设计
如果该力系不平衡,那么合力:
增加一个重物 Gb 后,可使新的力系之合力:
任意空间力系的平衡条件为:
首先在转子上选定两个回转平面Ⅰ和Ⅱ作为转面内的离心惯性力往平面Ⅰ和Ⅱ上分解。
动平衡的计算方法:
直接引用前述结论得:
动平衡的计算方法:
离心惯性力分解结果:
不平衡质量分解结果
作图法求解
机械原理——机械的平衡
21
机械原理
§6-3 刚性转子的平衡试验 理论上的平衡转子,由于制造精度、装配、材质不均匀 等原因,会产生新的不平衡。只能借助于实验平衡。 平衡实验是用实验的方法来确定出转子的不平衡量的大 小和方位,利用增加或除去平衡质量的方法予以平衡。
一.静平衡实验
1.实验原理
22
机械原理
2.实验设备
滚轮式静平衡仪
9
机械原理
10
机械原理
例:如图,盘状转子偏心质量m1、m2, 回转半径r1、r2,如何实现静平衡?
解: F F F 0 Ii b
ω
2 2 2 m1 r 1 m r 22 r 2m b r b0 r b 0 b m 2m
26
机械原理
3.现场平衡
对于一些尺寸非常大或转速很高的转子,一般无法在专用动 平衡机上进行平衡。即使可以平衡,但由于装运、蠕变和工作温 度过高或电磁场的影响等原因,仍会发生微小变形而造成不平衡。 在这种情况下,一般可进行现场平衡。 现场平衡 就是通过直接测量机器中转子支架的振动,来确 定其不平衡量的大小及方位,进而确定应增加或减去的平衡质量 的大小及方位,使转子得以平衡。
G4000
G1600
G630
1600
630
……
G2.5 G1 G0.4
……
2.5 1 0.4
……………………………..
燃气轮机和汽轮机、透平压缩机、机床传动装置、 特殊中、大型电机转子、小型电机转子等。 磁带录音机传动装置、磨床传动装置、特殊要求 的小型电机转子。 精密磨床的主轴、砂轮盘及电机转子陀螺仪。
32
机械原理
1.利用配重 2
1 4
s
机械原理-机械的平衡
机械原理-机械的平衡第四讲 机械的平衡一、 刚性转子的静平衡计算 (1)静不平衡转子: 对于轴向尺寸较小的盘状转子(即轴向宽度 b 与其直径 D 之比b /D < 0.2的转子),其质量可以近似认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。
由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子 (2)静平衡及其条件: 对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。
静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。
静平衡条件表达:形式一: 力条件:0=+=∑∑b IiF FF形式二:质径积条件:0=+∑bb ii rm r m(3)静平衡的计算: 即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。
对于静不平衡的转子,无论有多少个偏心质量,只需进行单面平衡。
例1 图示盘形回转件上存在三个偏置质量,已知m 110= kg ,m 215= kg ,m 310= kg ,r 150= mm ,r 2100= mm ,r 370= mm ,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡? 解:111050500 kg mmm r =⨯=⋅ 22151001500 kg mm m r =⨯=⋅ 331070700 kg mmm r =⨯=⋅1r 与3r 共线,可代数相加得3311700500200 kg mmm r m r -=-=⋅ 方向同3r r平衡条件:b b1122330m r m r m r m r +++=r r r r所以依次作矢量()331122,m r m r m r +r r r,封闭矢量b bm r r 即所求,如图示。
22b b 20015001513.275 kg mmm r =+=⋅0200270arctg277.5951500θ=+=︒b b例1图解例2 图示盘状转子上有两个不平衡质量:m 115=.kg,m 208=.kg ,r 1140= mm ,r 2180= mm ,相位如图。
机械原理课件--平衡

二、动平衡及其计算 转子的宽径比(B/D)大于0.2时,其质量就不能视为 分布在同一平面内了。这时,其偏心质量分布在 几个不同的回转平面内。
如下图所示。此 时,即使转子的 质心位于回转轴 上,也将产生不 可忽略的惯性力 矩,这种状态只 有在转子转动时 才能显示出来的 不平衡状态称为 动不平衡。
动平衡不仅平衡各偏心质量产生的惯性力, 而且还要平衡这些惯性力所形成的惯性力矩,即 不仅要使各偏心质量产生的惯性力的合力为零, 而且要使合成的惯性力矩为零。 2.动平衡的计算 为了达到动平衡应在转子上选择两个平面进行平衡 校正,称双面平衡。这两个平面可以任意选择,但 实际上必须能够安装配重或去重的平面,由转子结 构决定,且两平面间距离尽可能大些,提高校正精 度和平衡效率
动平衡的计算方法
以具有三个不平衡质 量的回转件为例。如 图所示,回转件的三 个不平衡质量m1、m2 和m3依次分布在1、2 、3三个回转面内,其 向径分别为r1、r2、r3 在平面1、2、3的两侧分别任选一个回转面T′和T″ ,两平面间的距离以及与1、2、3三个平面的距离 如图所示。
现将平面1、2、3 的质量m1 、m2和 m3分别用平面T′ 和T″内的质量m1′ 和m1″、 m2′和 m2″、 m3′和m3″ 来代替,并且各 代替质量与原质 量的质心向径相 同,即
′ r1′ = r1′ = r1 ′ ′ ′ r2 = r2 = r2 ′ r3′ = r3′ = r3
则在平面T′内三 个质量分别为 ′ ′ l1 ′ m1 = m1 l ′ ′ l2 m′ m2 2 = l ′ ′ l3 ′ m3 = m3 l
在平面T″内的三个质量分别为 ′ l1 ′ ′ m1 = m1 l ′ l2 ′ m′ = m2 2 l ′ l3 ′ ′ m3 = m3 l 经上述转化,可 以认为回转件的 不平衡质量已完
第九章机械的平衡ppt课件

1〕根据转子运转过程中测得的动挠度或对支承的动压力, 找出不平衡量的分布规律;
2〕根据不平衡量的分布规律,确定所需平衡质量的大小、 相位和沿轴向的安放位置,以消除或减少支承动压力和转 子的动挠度,并保证在一定转速范围内平稳运转。
二、挠性转子动平衡原理及方法简介
1、挠性转子的动平衡原理
[ m r ] —详细转子不平衡量大小
表示转子平衡精度
A [e] mm/ s
1000
质量为m的单平衡面平衡的盘状转子,许用不平衡量由平衡精度得到:
[mr]m[e]1000Am
对于双平衡面平衡的转子,是在两个平衡基面上分别进展平衡,
把许用不平衡量 [m]rm[e]分解到两个平衡基面上。
质量为m的单平衡面平衡的盘状转子,许用不平衡量由平衡精度得到:
刚性安装的高速四缸柴油机曲轴传动装置
六缸和六缸以上高速柴油机曲轴传动装置;汽车、机车用发动机整机(汽油机或 柴油机) 汽 车 轮 、轮 缘 、轮 组 、传 动 轴 ;弹 性 安 装 的 六 缸 或 六 缸 以 上 高 速 四 冲 程 发 动 机( 汽 油机或柴油机)曲轴传动装置;汽车、机车用发动机曲轴传动装置 特 殊 要 求 的 传 动 轴 ( 螺 旋 桨 轴 、 万 向 节 轴 ); 破 碎 机 的 零 件 ; 农 用 机 械 ; 汽 车 和 机 车 发 动 机 ( 汽 油 机 或 柴 油 机 ); 有 特 殊 要 求 的 六 缸 或 六 缸 以 上 发 动 机 曲 轴 传 动 装置 作 业 机 械 的 零 件 ; 船 用 主 汽 轮 机 齿 轮 ( 商 船 用 ); 离 心 机 鼓 轮 ; 风 扇 ; 装 配 好 的 航空燃气轮机;泵转子;机床和一般机械零件;普通电机转子;有特殊要求的发 动机部件 燃 气 轮 机 和 汽 轮 机 , 包 括 船 用 主 汽 轮 机 ( 商 船 用 ); 刚 性 汽 轮 发 电 机 转 子 ; 透 平 压缩机;机床传动装置;有特殊要求的中型和大型电机转子;小型电机转子;透 平驱动泵
机械原理课件-平衡
平衡状态的条件
要达到平衡状态,物体或系统必须满足力的平衡和力矩的平衡两个条件。
惯性力与平衡
惯性力是物体由于自身惯性而产生的力,它对平衡状态有重要影响。不平衡的惯性力会导致物体的运动状态变 化。
平衡控制系统
平衡控制系统通过控制力的大小和方向,使物体或系统保持平衡状态。
平衡系统的设计
设计一个平衡系统需要考虑物体的结构、材料、力学性质等因素,以确保它能够在各种条件下保持平衡。
力的平衡
力的平衡是指作用于物体的各个力的合力为零,物体保持静止或匀速直线运动。
机械原理课件-平衡
欢迎来到机械原理课件关于平衡的介绍。本课程将涵盖平衡的定义、种类、 条件,以及在不同领域中的应用
平衡的定义
平衡是物体或系统处于稳定状态的特性,其中各个力的合力和力矩为零。
平衡的种类
平衡可分为静态平衡和动态平衡ቤተ መጻሕፍቲ ባይዱ静态平衡是指物体处于静止状态,动态平 衡是指物体处于匀速直线运动状态。
机械原理第十一章 机械的平衡

当刚性转子的径宽比D / b 5时,通常只对转子进行静平衡试验。经平衡试验
所用的设备称为静平衡架。
O
如左图所示的是导轨式平衡架,
另外还有圆盘式静平衡架以及单摆
式静平衡架等类型。
S
O
Q
比较来说,导轨式结构简单, 平衡精度较高,但只适用于两端支 承轴尺寸相同的转子;圆盘式使用 方便,可以平衡两端尺寸不同的转 子,但平衡精度不如前者高。
11.1.2 机械平衡的方法
1. 平衡设计 在机构的设计阶段,除了要保证其满足工作要求及制造工艺之外,还要在结 构上采取措施消除或减少产生有害振动的不平衡惯性力,即进行平衡设计。
2. 平衡试验 经过平衡设计的机械,虽然从理论上已经达到平衡,但由于制造不精确、材 料不均匀及安装不准确等非设计原因,制造出来后达不到设计要求,还会有不平 衡现象。这种不平衡在设计阶段是无法确定和消除的,需要通过试验的方法加以 平衡。
变形不可忽略的转子称为挠性转子。 由于挠性转子在运转过程中会 产生较大的弯曲变形,且由此产生的离心惯性力也随之明显增大, 所以挠性转子平衡问题的难度将会大大增加。
2. 机构的平衡 对于存在有往复运动或平面复合运动构件的机构,其惯性力和惯性力矩不可 能在构件内部消除,但所有构件上的惯性力和惯性力矩可合成为一个通过机构质 心并作用于机架上的总惯性力和惯性力矩。因此,这类问题必须就整个机构加以 研究,应设法使其总惯性力和总惯性力矩在机架上得到完全或部分平衡,所以这 类平衡又称为机构在机架上的平衡。
mE1
l AB .mB re1
2. 对称布置法
mE3
lCD .mC re3
当机构本身要求多套机构同时工作时,可采用对称布置方式使惯性力得 到完全平衡,由于机构各构件的尺寸和质量完全对称,故在运动过程中其总 质心将保持不动。
【机械原理】[1]9-1机械的平衡
![【机械原理】[1]9-1机械的平衡](https://img.taocdn.com/s3/m/5d550b6316fc700abb68fcd4.png)
平衡方法:在构件上加一平衡质量(或除去一平衡质量),重新调整构 件的质量分布,使总质心落到回转轴线上,即可消除惯性力。 这种平衡又称转子的平衡。
(1)刚性转子的平衡
(2)挠性转子的平衡
2。机构的平衡
(也可以在反方向除去以平衡质量)
i为ri与x轴夹角(逆时针为正)
(mbrb )x miri cosi (mbrb ) y miri sini
1
mbrb (mbrb )2x (mbrb )2y 2
b
arctan
(mbrb (mbrb
) )
y x
机械原理
第6章 机械的平衡
用图解法确定平衡质量
机械平衡的目的:
全部或部分地消除惯性力的不良影响(利用惯性力工作的机械除外)。
机械原理
第6章 机械的平衡
二、机械平衡的内容
因 F mac,由于各构件的结构(m分布)不同,运动形式(ac)不同,其 产生的惯性力也不同,平衡方法也不同。
平面机构中各构件的运动形式:转动、移动、平面运动。 1。绕固定轴回转的构件惯性力的平衡
机械原理
第6章 机械的平衡
第 六 章 机械的平衡 Chapter 6 Balance of Mechanism
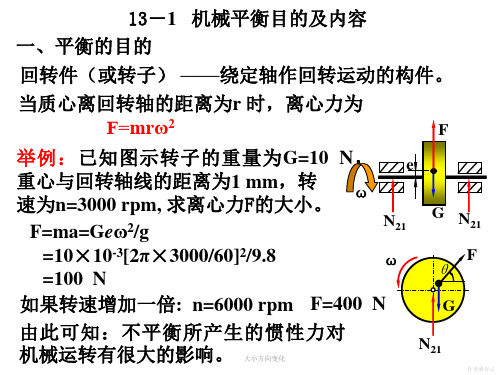
§6-1 机械平衡的目的及内容 一、机械平衡的目的
惯性力:
匀速直线运动(无)
匀速转动:中心惯性主轴与回转轴线重合(无) 具有偏心质量m将产生:F mr2 F 2
其他运动: (有)
惯性力的危害: 1)使运动副产生附加的动压力,增大摩擦,加速磨损; 2)使构件产生附加应力,影响疲劳强度; 3)将引起振动、共振。
清华大学机械原理课件机械的平衡资料

b arctan
(mb rb ) y (mb rb ) x
根据转子结构特点选定 rb →计算确定 mb
注意:
尽量增大 rb ,使 mb 小些; 转子实际结构不允许在向径
rb 的方向上安装平衡质量?
精密仪器与机械学系 设计工程研究所
结论:
产生静不平衡的原因是惯性力的合力不为零;
静平衡的条件为分布于转子上的各个偏心质量的离心惯性 力的合力为零或质径积的向量和为零; 对于静不平衡的转子,无论它有多少个偏心质量,都只需 要适当地增加一个平衡质量即可获得平衡。即对于静不平 衡的转子,需加平衡质量的最小数目为1。
l AB mB mE1 r E1 m lCD mC E3 rE3
总质量可用位于A、D 两点的两个质量替代:
mA m1 A mB mE1 mD m3 D mC mE3
精密仪器与机械学系 设计工
平衡设计的刚性转子在理论上是完全平衡的,但由于材
质不均匀及制造和装配误差等原因,在设计阶段无法确定和
消除的因素所产生的不平衡现象,需要通过试验的方法作进 一步的平衡。
精密仪器与机械学系 设计工程研究所
11.3.1 静平衡试验
平衡设计的刚性转子在理论上是完全平衡的,但由于材 质不均匀及制造和装配误差等原因,在设计阶段无法确定和 消除的因素所产生的不平衡现象,需要通过试验的方法作进
动的不平衡惯性力—平衡设计。 2. 平衡试验 由于材质不均匀及制造和装配误差等原因,在设计阶段 无法确定和消除的因素所产生的不平衡现象,需要通过试验 的方法作进一步的平衡。
精密仪器与机械学系 设计工程研究所
11.2 刚性转子的平衡设计 平衡设计
高速转子 精密转子
机械的平衡ppt课件

试验设备:动平衡试验机
S
13
驱动系统
动平衡试验机
13 1
试件支承系统(弹性支承)
不平衡量检测系统
传感器 解算电路
信号放大电路
基准信号发生器
9
鉴相器
12
8
7
11
10 2
5
6
4
3
大小 不平衡质径积
相位
14
三、回转件许用不平衡量及平衡精度
1、不平衡量的表示方式
不平衡质径积 径矢e(质心的偏心距)
许用不平衡量按工作要求定。
第九章 机械的平衡
本章重点: 刚性转子静平衡和动平衡的原理和配重计算。 本章难点: 刚性转子动平衡的配重计算。
1
§9-1 机械平衡的目的及分类
一、机械平衡的目的 当一质量为m、偏心距为e的构件以匀
角速度ω绕转轴O转动时,将产生离心惯 性力meω2;易得轴承O处的约束反力:
N y mg me 2 sin
不平衡质量的质径积为miri (i=1,…,n)。
为使转子获得动平衡,应选定两个回转面T '和T ''作为平衡基
面(即准备加上或除去平衡配重的回转面) 。
F'' 2
F' 2
I
1
mI
rI
F' 3
F' 1
l' 1
F2 m2 2 r2
r1 m1
F1
l'2 l'3
l
3 r3 m3
F3 l'' 1
l''2
II
2)刚性转子静平衡时配重的计算; 3)刚性转子动平衡时配重的计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(二、动平衡 )
汽轮机转子的动平衡实验
回答本节开始提出的问题
汽车车轮动平衡 车轮对维持行驶稳定性和保证乘
坐舒适性起着关键的作用。理想状 态下车轮是质量分布均匀,外形保 持规则的圆形。但是,部件在制造 过程中无法达到绝对的高精度,不 可避免地会产生误差,其结果是造 成车轮旋转质量不平衡。
y m2B= m2- m2Ay=80-40=40g ;
m3A=m3b3/L=70
50/300=11.67g;
y
y
பைடு நூலகம்
F2
m2A
x 3r2 2
r3 r1
m1A
r2 r1z m1 F1
m2m2 3B=r3m3 3y-xmm3Ar3r3B=327rm10m-22B111B.67x=58.33g;
x Fm3 3
第二节 刚性转子的平衡原理
(二、动平衡 )
将m向A、B两平衡面分解
y B
m
A
r
x
b a
L
第二节 刚性转子的平衡原理
(二、动平衡 )
若 mA、mB与F m等效有: FB
y
mA+mFBA= m;
mA
amA=bmmBB
m
r
r
r
x
B
A
b mA = mb/L
a
L
mB = am/L
第二节 刚性转子的平衡原理
一、刚性转子的静平衡
第二节 刚性转子的平衡原理
y
(一、静平衡 )
m2 r2
o
x
D
r1 m1
rn
mn
第二节 刚性转子的平衡原理
n个分布在同一平面中 的质量m1,m2,….mn。
(一、静平衡 )
径宽比
D/L5
第二节 刚性转子的平衡原理
r1,r2,…,rn向径
y
(一、静平衡 )
向径方向角
1,2,…,n
m2
r2 2
n o
x
D
r1 m1
rn
mn
第二节 刚性转子的平衡原理
(一、静平衡 )
y
m2
n r2 2
o
D
r1 m1
rn
离心惯性力的合力
2miri
x
mn
第二节 刚性转子的平衡原理
(一、静平衡 )
加mb以平衡该离 心惯性力。
y
各质量的惯性力矢量合等于零。 将各质量的总质心调整到转动轴。
m2
b
r2
mb rb
(二、动平衡 )
B平面
B平面: m1B= m1- m1A =50-41.67=8.33g ; m2B= m2- m2A =80-40=40g ; m3B= m3- m3A =70-11.67=58.33g
y
m2B
3
r3
r2 x
2
r1
m1B
m3B
第二节 刚性转子的平衡原理
(二、动平衡 )
B平面
y
m2B mbB
第二节 刚性转子的平衡原理
(二、动平衡 )
选取两个平衡面(correcting plane) A、B
B F2 3
2
1
A
r2 m2
r3
x
m3
r1 m1 F1
F3
第二节 刚性转子的平衡原理
(二、动平衡 )
F2
B
3
2
A
1
r2 m2
r3
x
m3
r1 m1 F1
F3
b3
a3 L
第二节 刚性转子的平衡原理
(二、动平衡 )
miA=mibi/L (i=1,2,3) y
m2A
3r2 2 r3 r1
m1A
x
m3A
B 平面:
y
y
miB=mi
F2
ayi/L=
mi-y
(i=1,2,3m)2 3
r2 2
r3
miA
3 r2 x r3 m3B
m2B
2 r1 m1B
x
x m3
r1 m1 F1
F3
b3
a3 L
最后,A、B两平面按静平衡方法分
o 2 r1
x
n
m1
刚性转子的静r平n 衡的表达式: mn
F = 0
第二节 刚性转子的平衡原理
(一、静平衡 )
mr为y质量矩
F=0
(mass-radius product)
mb
b
m2 r2
rb
n
o 2 r1
m1
rn
mn
n
2 miri 2mbrb 0 i 1
xn
* miri mbrb 0 i 1
41.67100cos0 40 80cos90 11.67120cos 225 gmm
3176.77gmm
yA 41.67100sin 0 4080sin 90 11.67120sin 225 gmm
2209.77gmm
第二节 刚性转子的平衡原理
(二、动平衡 )
A平面
mbArbA
(二、动平衡 )
根据以上原理,将各质量分解
到A、B两个平衡面上。
y
y
y
m2A
x 3r2 2
r3 r1
m1A
y
F2
y
m2B
3
m2 r2 2
3 r3
x
r2 2
r3 r1 m1B m3B
x
x m3
r1 m1 F1
F3
b3
m3A
a3 L
第二节 刚性转子的平衡原理
(二、动平衡 )
A平面:
y
miA=mibi/L
(i=1,2,3)
y
y
F2
y
3 m2B
y
x 3r2
r3
m2A
2 r1
m1A
m2 r2 2
3 r3
r2 2
x
r3 r1 m3B
m1B
x
x m3
r1 m1 F1
F3
b3
m3A
a3 L B平面:
miB=mi ai/L
=mi- miA (i=1,2,3)
第二节 刚性转子的平衡原理
(二、动平衡 )
A 平面:
原因何在?
第一节 概述
第一节 概述
第一节 概述
*附加的动压力—— 构件惯性力在运动副中产生的压力。
其大小和方向周期性变化 增加运动副的摩擦 降低机械效率和使用寿命
发生有害的振动甚至使机械遭到破坏
第一节 概述
机械的平衡的目的:
合理地分配构件中的质量,消除或 减少附加动压力以及机座的振动。
第一节 概述
y
m2A
3r2 2 r3 r1
m1A
x
m3A
y
F2 y
y
3 m2B
m2 r2 2
3 r3
r2 2
x r3 r1 m1B m3B
x
x m3
r1 m1 F1
F3
b3
a3 L
若rb=100mm,
例14-1
求两平衡质量。
第二节 刚性转子的平衡原理
(二、动平衡 )
m1=50g; m2=80g; m3=70g; r1=100mm; r2=80mm; r3=120mm; 1=0º; 2=90º; 3=225º
i 1
第二节 刚性转子的平衡原理
(一、静平衡 )
y
n
miri cosi mbrb cosb 0
i 1
mb
b
m2 r2
rb o 2 r1
n
m1
n
miri sin i mbrb sin b 0
i 1
x
rn
mbmrbn
n i 1
mi ri
c os i
2
n i 1
mi ri
s in i
机械的平衡问题可分为以下三个方面:
1)刚性转子的平衡
刚性转子(rigid rotor) —— 无显著地弹性变形的刚性转动构件。
平衡原理——力系的平衡原理。
第一节 概述
2)挠性转子的平衡
挠性转子(flexible rotor) —— 在惯性力的影响下产生弯曲变形的
转子。
第一节 概述
3)机械在机座上的平衡
平面运动的构件的惯性力由机座平衡。 机构的平衡称为机械在机座上的平衡。
本章着重讲解刚性转子的 平衡原理与方法。
第二节 刚性转子的平衡原理
第二节 刚性转子的平衡原理
第二节 刚性转子的平衡原理
刚性转子的平衡
静平衡 (static balace)
动平衡 (dynamic balace)
第二节 刚性转子的平衡原理
xA2 yA2
1
2 3869.75gmm
xA=3176.77gmm, yA=2209.77gmm
y
当rb=100mm时, mb=38.7g
tanbA
yA
xA
2209.77 3176.77
b
A
m2A
3 r2 2
m1A x
bA 214 .823
mb
A
r1
m3A
r3
第二节 刚性转子的平衡原理
第十四章 机械的平衡
(Balance of Machinery)
授课教师:侯 宇
本章内容
第一节 概述 第二节 刚性转子的平衡原理 *第三节 转子的平衡试验及平衡精度 *第四节 平面连杆机构质量矩平衡方法 *第五节 平面连杆机构惯性力平衡的适用方法