模糊逻辑控制作业
模糊逻辑控制matlab编程仿真(第七组)讲解
《智能控制》模糊逼近作业报告组员:李适、郑晓森、匡金龙、沈伟生、武云发黎浩炎、晏开、杜文学、杨晓星目录一、任务及要求 (3)二、系统分析及控制设计原理 (3)三、设计实现 (4)四、仿真验证 (7)五、讨论与分析 (12)一、任务及要求(1)任务设计一个在 上的模糊系统,使其以精度 一致地逼近函数()()()()()ππππ2121cos sin cos sin x x x x x g ++=,并进行Matlab 仿真。
(2)要求先进行系统分析,然后给出完整详细的设计过程,可参见P74-75页例5.1和例5.2的仿真实例。
二、系统分析及控制设计原理自适应模糊控制是指具有自适应学习算法的模糊逻辑系统,其学习算法是依靠数据信息调整模糊逻辑系统的参数,且可以保证控制系统的稳定性。
一个自适应模糊控制器可以用一个单一的自适应模糊系统构成,也可以用若干个自适应模糊系统构成。
与传统的自适应控制相比,自适应模糊控制的优越性在于它可以利用操作人员提供的语言性模糊信息,而传统的自适应控制则不能。
这一点对具有高度不确定因素的系统尤其重要。
自适应模糊控制有两种不同形式:一种是直接自适应模糊控制,即根据实际系统性能与理想性能之间的偏差直接设计模糊控制器;另一种是间接自适应模糊控制,即通过在线模糊逼近获得对象的模型,然后根据所得模型在线设计控制器。
三、设计实现(1)模糊系统的设计步骤设二维模糊系统g(x)为集合22211],[],[R U ⊂⨯=βαβα上的一个函数,其解析式形式未知。
假设对任意一个U x ∈,都能得到g(x),则可设计一个逼近g(x)的模糊系统。
模糊系统的设计步骤为:步骤1:在],[i i βα上定义)2,1(=i N i 个标准的,一致的和完备的模糊集i N i i i i A A A A ,...,,,321。
[][]1,11,1-⨯-=U 1.0=ε步骤2:组建21N N M ⨯=条模糊集IF-THEN 规则,即21ui i R :如果1x 为11i A 且2x 为22i A ,则y 为21i i B 式中,2211,...,2,1;,...,2,1N i N i ==,将模糊集21i i B 的中心表示为),(),(g 21121221i i i i e e g x x y==式中,j i e 为i x 在模糊集j i A 上的中间值或边界值()2,1;2,1==j i 。
模糊控制应用实例
模糊控制应用实例模糊控制是一种基于模糊逻辑的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
下面将介绍一个模糊控制的应用实例。
某工厂的生产线上有一台机器人,它需要根据生产线上的物品进行分类和分拣。
由于生产线上的物品形状、颜色、大小等特征存在一定的模糊性,传统的控制方法很难实现准确的分类和分拣。
因此,工厂决定采用模糊控制方法来解决这个问题。
首先,需要对机器人的控制系统进行建模。
假设机器人的控制系统包括三个输入变量和一个输出变量。
其中,三个输入变量分别为物品的大小、颜色和形状,输出变量为机器人的动作,包括分类和分拣两种动作。
接下来,需要确定输入变量和输出变量的模糊集合和模糊规则。
假设物品的大小、颜色和形状分别属于三个模糊集合:小、中、大;红、绿、蓝;圆、方、三角。
输出变量也分别属于两个模糊集合:分类、分拣。
根据这些模糊集合,可以确定一些模糊规则,例如:如果物品大小为小且颜色为红且形状为圆,则机器人动作为分类;如果物品大小为中且颜色为绿且形状为方,则机器人动作为分拣;如果物品大小为大且颜色为蓝且形状为三角,则机器人动作为分类。
最后,需要进行模糊推理和模糊控制。
当机器人接收到一个物品时,它会根据物品的大小、颜色和形状,将它们映射到对应的模糊集合中。
然后,根据模糊规则进行模糊推理,得到机器人的动作。
最后,根据机器人的动作,控制机器人进行分类或分拣。
通过模糊控制方法,机器人可以更准确地分类和分拣物品,提高生产效率和质量。
同时,模糊控制方法还具有较好的鲁棒性和适应性,能够应对物品特征的变化和噪声的干扰。
总之,模糊控制是一种有效的控制方法,它能够处理模糊的输入和输出,使得控制系统具有更好的鲁棒性和适应性。
在工业生产、交通运输、医疗健康等领域都有广泛的应用。
自动化控制系统中的模糊逻辑应用
自动化控制系统中的模糊逻辑应用自动化控制系统中的模糊逻辑是一种有效的控制方法,它可以处理模糊和不确定性信息,提高系统的控制性能和适用性。
在自动化控制系统中,模糊逻辑应用广泛,包括模糊控制、模糊识别、模糊推理等方面。
首先,模糊逻辑在自动化控制系统中的一个主要应用是模糊控制。
传统的控制方法往往需要准确的数学模型和精确的控制规则,但是在实际应用中系统参数往往难以确定或者存在不确定性。
而模糊控制可以处理这种模糊性和不确定性,根据系统的输入输出关系以及专家经验进行控制决策。
通过模糊逻辑的模糊化、模糊推理和解模糊化等步骤,可以实现对非线性、不确定性系统的控制。
其次,模糊逻辑在自动化控制系统中的另一个重要应用是模糊识别。
模糊逻辑可以将模糊的输入信息转化为清晰的输出结果,用于模糊模式识别、模糊分类和特征提取等任务。
比如,在工业自动化中,可以利用模糊逻辑对传感器获取的模糊信息进行处理,实现对不同工况下系统状态的自动识别和监测。
此外,模糊逻辑在自动化控制系统中还可以应用于模糊推理。
模糊推理是基于模糊逻辑的推理方法,将模糊描述的规则进行模糊推理,得到结果的模糊度量。
通过模糊推理,可以处理模糊规则、不确定性条件下的推理问题,实现自动化控制系统的智能化和自适应控制。
总的来说,自动化控制系统中的模糊逻辑应用是一种有效的控制方法,可以处理系统中的模糊性和不确定性信息,提高系统的控制性能和适用性。
在实际应用中,可以根据具体的控制任务和系统特性选择合适的模糊逻辑方法,实现对复杂、非线性系统的有效控制和优化。
希望未来能够进一步完善模糊逻辑理论,推动其在自动化控制系统中的广泛应用和发展。
基于模糊逻辑的自动化控制系统设计
基于模糊逻辑的自动化控制系统设计在当今科技飞速发展的时代,自动化控制系统在各个领域都发挥着至关重要的作用。
从工业生产中的流水线作业到智能家居中的环境调控,从交通运输的优化管理到医疗设备的精准运行,自动化控制系统的身影无处不在。
而模糊逻辑作为一种处理不确定性和模糊性问题的强大工具,为自动化控制系统的设计带来了新的思路和方法。
那么,什么是模糊逻辑呢?简单来说,模糊逻辑是一种不同于传统二值逻辑(真或假)的逻辑体系。
在模糊逻辑中,事物的状态不是绝对的“是”或“否”,而是存在一定程度的“模糊性”。
例如,温度“高”“中”“低”的划分并不是明确的界限,而是一个逐渐过渡的范围。
这种对不确定性和模糊性的包容,使得模糊逻辑能够更贴近现实世界中复杂多变的情况。
基于模糊逻辑的自动化控制系统设计,首先需要明确系统的控制目标和控制对象。
比如,在一个室内温度控制系统中,控制目标是将室内温度保持在一个舒适的范围内,控制对象就是空调设备。
接下来,要对控制对象的输入和输出变量进行模糊化处理。
以温度为例,将实际的温度值转化为模糊的语言变量,如“很冷”“冷”“适中”“热”“很热”等。
在完成变量的模糊化后,就需要制定模糊控制规则。
这些规则是根据经验和专业知识来确定的。
例如,如果室内温度被判断为“很热”,那么空调应该以较大的制冷功率运行;如果温度是“适中”,则保持当前的运行状态。
这些规则通常以“如果……那么……”的形式来表述。
模糊推理是整个控制系统的核心环节。
它根据输入的模糊变量和制定的控制规则,通过特定的算法来计算出输出的模糊值。
常用的模糊推理方法有 Mamdani 推理法和 Sugeno 推理法等。
以 Mamdani 推理法为例,它通过对输入变量的模糊集合与控制规则中的条件部分进行模糊运算,得到输出变量的模糊集合。
得到输出的模糊值后,还需要进行反模糊化处理,将其转化为具体的控制量。
常见的反模糊化方法有重心法、最大隶属度法等。
例如,使用重心法时,通过计算输出模糊集合的重心对应的数值,得到最终的精确控制量,从而实现对控制对象的精确控制。
模糊逻辑控制技术在制造业中的应用
模糊逻辑控制技术在制造业中的应用随着科技的发展,机械和电子控制技术的迅猛发展,越来越多的自动化设备和生产流程需要进行复杂的控制以实现高质量、高效率的生产。
而传统的数学模型和逻辑控制方法,在复杂的制造环境下不能够很好地解决问题。
因此,模糊逻辑控制技术应运而生。
模糊逻辑控制技术(Fuzzy Logic Control,FLC)是一种基于模糊数学原理和语言学的控制方法。
它不同于传统二进制逻辑控制,而是考虑了各种模糊情况和含糊因素,具有较强的适应性和智能性。
在自动化制造中,由于工业过程通常具有大量的随机性、扰动和不确定性,模糊逻辑控制技术能够更好地处理这些问题,提高系统的鲁棒性和稳定性。
在制造业中,模糊逻辑控制技术广泛应用于机器人、智能控制系统、加工设备等自动化设备中。
比如,在数控机床的控制中,往往需要针对加工物料的硬度、切削深度、进给速度等因素进行适当的控制。
这些因素显然难以用传统的数学模型精确地描述,但是如果采用模糊逻辑控制技术,将加工物料硬度和切削深度分别定义为输入变量,进给速度定义为输出变量,则可以通过建立一组模糊规则,达到实现自动控制的目的。
同时,模糊逻辑控制技术还支持模糊推理、模糊判断、模糊信息处理等功能,许多智能控制系统中都会使用FLC进行实现。
除了在自动化设备中的应用外,模糊逻辑控制技术在制造流程控制中也有广泛应用。
在电子制造中,传统的控制方法常常难以精确描述半导体材料的生长,模糊逻辑控制技术可以通过模糊推理得出生长过程的趋势和规律,从而更好地控制生长速度和生长质量。
在汽车制造中,模糊逻辑控制技术也可以用于自适应生产线控制,实现自动化生产线的优化控制和生产调度。
在实际应用中,模糊逻辑控制技术还有许多发展方向和挑战。
例如,在模糊规则的设计方面,如何针对不同的应用场景建立准确、稳定、高效的模糊规则,是一个重要的研究方向。
此外,模糊逻辑控制技术中存在的模糊变量、模糊规则等概念也需要更好地阐释和建立,以实现更好的控制效果。
模糊控制设计及仿真实例智能控制作业
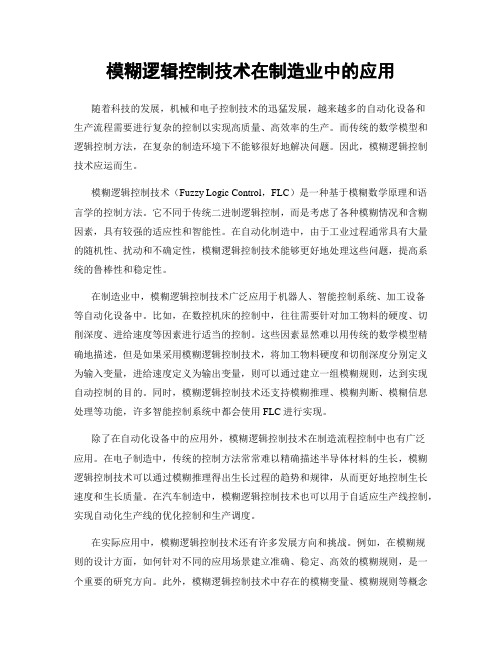
1.一个三阶系统201232123b b b a a a s s s s s +++++ ,其中a,b 的值由自己设定,该系统具有非线性环节,如下图所示:依据上述条件设计一个模糊控制器: ①用MATLAB 仿真,得出仿真结果, ②并通过改变a 、b 值对仿真结果的影响;③改变隶属度函数,从仿真结果图分析隶属度函数,模糊化对系统的影响; 解:①(1)取b0=0,b1=0,b2=1.5,a1=4,a2=2,a3=0,在SIMULINK 里建模如下图所示(2)用GUI 建立FISE 和EC 分别为系统输出误差和误差的变化量,U 为控制输出,编辑其隶属度函数如下编辑模糊推理规则如下(3)仿真结果如下2自己选定一个对象,设计一个神经网络控制系统。
解:被控对象为y(k)=0.3y(k-1)+0.2y(k-2)+0.1u(k-1)+0.6u(k-2),采用单神经元PID 控制,控制结构如下图所示:采用有监督的Hebb 学习规则,控制算法及学习算法如下:3131111222333()(1)()()()()/()()(1)()()()()(1)()()()()(1)()()()i i i i i i i I P D u k u k K w k x k w k w k w k w k w k z k u k x k w k w k z k u k x k w k w k z k u k x k ηηη=='=-+'==-+=-+=-+∑∑式中,2123()();()()(1);()()()2(1)(2);x k e k x k e k e k x k e k e k e k e k ==--=∆=--+-K K >0I P D ηηη﹑﹑分别为积分﹑比例﹑微分的学习速率,为神经元比例系数,。
输入信号为方波:()rin k 0.5sgn (sin (4t))π=仿真程序如下:clear all ; close all ;x=[0,0,0]';xiteP=0.40; xiteI=0.35; xiteD=0.40;wkp_1=0.10;wki_1=0.10;wkd_1=0.10;error_1=0;error_2=0;y_1=0;y_2=0;y_3=0;u_1=0;u_2=0;u_3=0;ts=0.001;for k=1:1:1000time(k)=k*tsrin(k)=0.5*sign(sin(4*pi*k*ts));yout(k)=0.3*y_1+0.2*y_2+0.1*u_1+0.6*u_2;error(k)=rin(k)-yout(k);wkp(k)=wkp_1+xiteP*error(k)*u_1*x(1);%Pwki(k)=wki_1+xiteI*error(k)*u_1*x(2);%Iwkd(k)=wkd_1+xiteD*error(k)*u_1*x(3);%DK=0.12;x(1)=error(k)-error_1;x(2)=error(k);x(3)=error(k)-2*error_1+error_2;wadd(k)=abs(wkp(k))+abs(wki(k))+abs(wkd(k)); w11(k)=wkp(k)/wadd(k);w22(k)=wki(k)/wadd(k);w33(k)=wkd(k)/wadd(k);w=[w11(k),w22(k),w33(k)];u(k)=u_1+K*w*x;%Control lawif u(k)>10u(k)=10;endif u(k)<-10u(k)=-10;endu_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);wkp_1=wkp(k);wkd_1=wkd(k);wki_1=wki(k);endfigure(1);plot(time,rin,'b',time,yout,'r');xlabel('time(s)');ylabel('rin,yout'); figure(2);plot(time,error,'r');xlabel('time(s)');ylabel('error');figure(3);plot(time,u,'r');xlabel('time(s)');ylabel('u');仿真结果如下:3.前向神经网络拟合一个函数y=sin(x)*cos(10x),取n个样本,神经网络的层数和每层的点数可自定。
基于模糊逻辑控制的家庭电器自动化控制系统
基于模糊逻辑控制的家庭电器自动化控制系统近年来,随着智能家居技术的不断发展,越来越多的家庭开始尝试使用自动化控制系统来控制家用电器,从而提高生活质量和便利性。
其中,基于模糊逻辑控制的家庭电器自动化控制系统,具有精准控制、高效能耗和用户友好等特点,备受青睐。
一、模糊逻辑控制原理基于模糊逻辑的控制方法,是指在控制系统中采用模糊逻辑代替传统的二元逻辑,用数学模型描述物理系统之间的非精确关系,从而实现控制。
简单来说,就是通过模糊推理来判断各个因素对结果的影响程度,从而得出最终的控制值。
二、模糊逻辑控制在家庭电器自动化控制系统中的应用在家庭电器自动化控制系统中,通过将各种传感器、执行器及控制器等设备联网,形成一个完整的系统。
利用模糊逻辑控制方法,可以根据家庭电器使用情况和用户的习惯,自动调节家用电器的使用,减少能耗损失、提高舒适度和安全性。
例如,使用模糊逻辑控制器控制家庭照明系统,可以根据室内亮度、时间和用户需求等因素,自动调整灯光亮度和颜色,避免浪费不必要的电能,提高舒适感。
同时,还可以使用模糊控制方法控制家庭空调系统,根据室内温度、湿度和用户需求等因素,自动调整温度和风速,提高空调效率和稳定性。
三、模糊逻辑控制系统的优势与传统控制方法相比,基于模糊逻辑的控制系统具有以下优势:1. 精准控制:通过模糊逻辑推理,可以实时监测和调整家庭电器的状态,达到更精准的控制效果。
2. 高效能耗:通过自动化控制,可以有效减少不必要的能耗损失,提高能源利用效率。
3. 用户友好:通过智能控制方式,可以提高家庭的舒适性和便利性,对于老年人和儿童等特殊群体,更具有照顾和方便性。
四、总结随着科技的不断进步,智能家居已经成为人们生活中的重要部分。
基于模糊逻辑控制的家庭电器自动化控制系统,不仅可以提高生活质量和便利性,还能有效减少能耗损失,具有广阔的应用前景。
我相信,不久的将来,模糊逻辑控制技术将在智能家居领域大放异彩。
模糊逻辑算法应用实例

模糊逻辑算法应用实例
随着科技的不断发展,智能家居已经成为了现代家庭的一种趋势。
智能家居控制系统可以通过智能手机、平板电脑等设备,实现对家居设备的远程控制,如灯光、空调、窗帘等。
而模糊逻辑算法则是智能家居控制系统中的重要算法之一。
模糊逻辑算法是一种基于模糊数学理论的推理方法,它可以处理模糊信息,即不确定或不精确的信息。
在智能家居控制系统中,模糊逻辑算法可以用来处理用户的语音指令或手势控制,从而实现对家居设备的控制。
例如,当用户说“请把客厅的灯光调暗一点”,模糊逻辑算法可以将“调暗一点”这个模糊指令转化为具体的数值,如将灯光亮度从80%调整到60%。
这样,智能家居控制系统就可以根据用户的模糊指令,自动调整家居设备的状态。
模糊逻辑算法还可以用来处理多个条件之间的关系。
例如,当用户说“如果室内温度高于25℃,请打开空调”,模糊逻辑算法可以将“高于25℃”这个条件转化为一个模糊集合,然后根据这个模糊集合的程度,来决定是否打开空调。
这样,智能家居控制系统就可以根据多个条件之间的关系,自动调整家居设备的状态。
模糊逻辑算法在智能家居控制系统中的应用,可以使系统更加智能化、人性化,提高用户的使用体验。
未来,随着人工智能技术的不
断发展,模糊逻辑算法将会在更多的领域得到应用。
毕业设计106模糊逻辑控制器的设计1
3. 模糊逻辑控制器的设计模糊逻辑控制器(Fuzzy Logic Controller)简称为模糊控制器(Fuzzy Controller),因为模糊控制器的控制规则是基于模糊条件语句描述的语言控制的控制规则,所以模糊控制器又称为模糊语言控制器。
模糊控制器在模糊自动控制系统中具有举足轻重的作用,因此在模糊控制系统中,设计和调整模糊控制器的工作是很重要的。
模糊控制器的设计包含以下几项内容:(1)、量和确定模糊控制器的输入变输出变量(即控制量)。
(2)、设计模糊控制器的控制规则。
(3)、确定模糊化和非模糊化(又称清晰化)的方法。
(4)、选择模糊控制器的输入变量和输出变量的论域并确定模糊控制器的参数(如量化因子,比列因子)。
(5)、编辑模糊控制算法的应用程序。
(6)、合理选择模糊控制算法的采样时间。
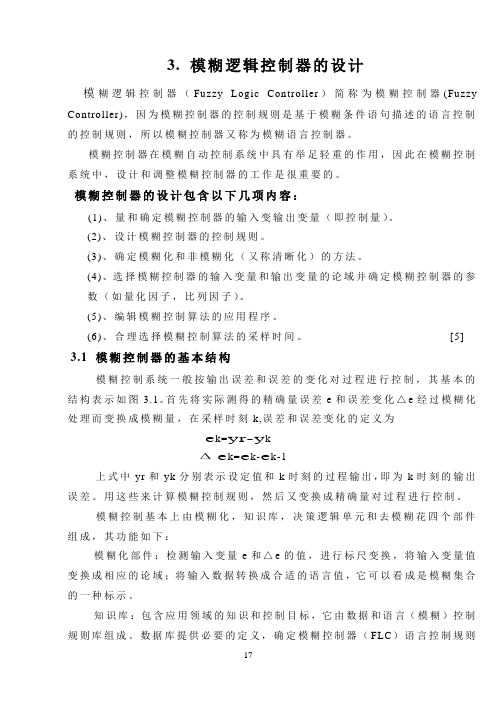
[5] 3.1 模糊控制器的基本结构模糊控制系统一般按输出误差和误差的变化对过程进行控制,其基本的结构表示如图3.1。
首先将实际测得的精确量误差e和误差变化△e经过模糊化处理而变换成模糊量,在采样时刻k,误差和误差变化的定义为e k=yr-y kΔe k=e k-e k-1上式中yr和yk分别表示设定值和k时刻的过程输出,即为k时刻的输出误差。
用这些来计算模糊控制规则,然后又变换成精确量对过程进行控制。
模糊控制基本上由模糊化,知识库,决策逻辑单元和去模糊花四个部件组成,其功能如下:模糊化部件:检测输入变量e和△e的值,进行标尺变换,将输入变量值变换成相应的论域;将输入数据转换成合适的语言值,它可以看成是模糊集合的一种标示。
知识库:包含应用领域的知识和控制目标,它由数据和语言(模糊)控制规则库组成。
数据库提供必要的定义,确定模糊控制器(FLC)语言控制规则图3.1 模糊控制系统的基本结构和模糊数据的操作。
规则库由一组语言控制规则组成,它表征控制目标和论域专家的控制策略。
决策逻辑是模糊控制系统的核心。
它基于模糊概念,并用模糊逻辑中模糊隐含和推理规则获得模糊控制作用,模拟人的决策过程。
毕业设计106模糊逻辑控制器的设计1
3. 模糊逻辑控制器的设计模糊逻辑控制器(Fuzzy Logic Controller)简称为模糊控制器(Fuzzy Controller),因为模糊控制器的控制规则是基于模糊条件语句描述的语言控制的控制规则,所以模糊控制器又称为模糊语言控制器。
模糊控制器在模糊自动控制系统中具有举足轻重的作用,因此在模糊控制系统中,设计和调整模糊控制器的工作是很重要的。
模糊控制器的设计包含以下几项内容:(1)、量和确定模糊控制器的输入变输出变量(即控制量)。
(2)、设计模糊控制器的控制规则。
(3)、确定模糊化和非模糊化(又称清晰化)的方法。
(4)、选择模糊控制器的输入变量和输出变量的论域并确定模糊控制器的参数(如量化因子,比列因子)。
(5)、编辑模糊控制算法的应用程序。
(6)、合理选择模糊控制算法的采样时间。
[5] 3.1 模糊控制器的基本结构模糊控制系统一般按输出误差和误差的变化对过程进行控制,其基本的结构表示如图3.1。
首先将实际测得的精确量误差e和误差变化△e经过模糊化处理而变换成模糊量,在采样时刻k,误差和误差变化的定义为e k=yr-y kΔe k=e k-e k-1上式中yr和yk分别表示设定值和k时刻的过程输出,即为k时刻的输出误差。
用这些来计算模糊控制规则,然后又变换成精确量对过程进行控制。
模糊控制基本上由模糊化,知识库,决策逻辑单元和去模糊花四个部件组成,其功能如下:模糊化部件:检测输入变量e和△e的值,进行标尺变换,将输入变量值变换成相应的论域;将输入数据转换成合适的语言值,它可以看成是模糊集合的一种标示。
知识库:包含应用领域的知识和控制目标,它由数据和语言(模糊)控制规则库组成。
数据库提供必要的定义,确定模糊控制器(FLC)语言控制规则图3.1 模糊控制系统的基本结构和模糊数据的操作。
规则库由一组语言控制规则组成,它表征控制目标和论域专家的控制策略。
决策逻辑是模糊控制系统的核心。
它基于模糊概念,并用模糊逻辑中模糊隐含和推理规则获得模糊控制作用,模拟人的决策过程。
模糊逻辑控制实验指导书学习研究资料

模糊逻辑控制MATLAB 实验指导书一、实验目的1、本实验要求在学生掌握模糊控制器基本工作原理和设计方法基础上,熟悉MALAB 中的模糊控制工具箱,能针对实际问题设计模糊控制器,建立模糊控制系统,训练学生综合运用计算机来解决一些实际问题的能力。
2、通过仿真分析模糊控制器的信息的变化(主要讨论控制器解模方法和量化因子的变化)对系统性能的影响。
3、在控制器信息一定的情况下改变被控对象的信息,分析对象信息变化时fuzzy controller 的适应能力。
二、实验设备微型计算机一台 MATLAB 软件三、实验要求设计一个二维模糊控制器控制一个二一阶被控对象21()21G s s s =++,分别改变控制器和控制对象信息的大小,观察模糊控制的鲁棒性。
四、实验分析完成以上要求分两步:一是在fuzzy logic 工具箱中建立模糊推理系统(FIS ),二是在simulink 中建立完整的模糊控制系统并进行仿真分析。
(一)、模糊控制器的设计模糊控制器的设计方法为:1、选取控制器的输入输出:选取误差e 及误差变化量ec 为输入, u 作为输出用于控制对象,这样模糊控制器具有二输入一输出的结构。
2、模糊集及论域的定义:● 输入e 的模糊子集为{NB NM NS NO PO PS PM PB} ● 输入ec 和输出u 的模糊子集均为{NB NM NS ZO PS PM PB} ● e 的论域为{-6 -5 -4 -3 -2 -1 -0 +0 1 2 3 4 5 6 } ● ec 的论域为{-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 } ● u 的论域为{-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 } 我们选取三角形作为隶属度函数的形状,图1-1 e的隶属度函数图1-2 ec的隶属度函数图1-3 u 的隶属度函数3、确定模糊控制规则,模糊规则表如下:NBNMNSZOPSPMPBNB NB NB NB NB NM ZO ZO NM NB NB NB NB NM ZO ZO NS NM NM NM NM ZO PS PS NO NM NM NS ZO PS PM PM PO NM NM NS ZO PS PM PM PS NS NS ZO PM PM PM PM PM ZO ZO PM PB PB PB PB PBZOZOPMPBPBPBPB4、选取输入输出变量的量化因子:这里暂时选定输入输出的量化因子Ke =Kc =Ku =1,接下来的仿真过程还可以调整。
模糊控制综合练习参考
模糊控制综合练习参考资料实验一模糊工具箱的使用一、实验目的1、掌握Matlab模糊工具箱的应用。
2、掌握模糊集合的基本运算。
3、能够使用Simulink工具箱设计模糊控制系统。
二、实验设备1、PC机2、Matlab软件三、实验内容第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy 回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型)将Number of MFs 设置为2,点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type中选择形状,在Params中键入范围,然后回车如下图:本例中:In_x,In_y隶属度函数相同,如下Out_x,Out_y隶属度函数相同,如下:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
北航智能控制模糊控制作业
智能控制及应用大作业一——双输入—单输出系统的模糊控制姓名:学号:2011-10-14题目要求以双输入—单输出系统为例,画出模糊控制算法程序流程图,计算出模糊控制器的查询表。
假设控制器输入为误差e和误差变化率ec,输出为控制量u,其基本论域分别为[e min,e max],[ec min,ec max],[u min,u max],对应的语言变量E、EC和U的论域为{-6,-5,…,-1,0,1,…,5,6},E、EC和U都选7个语言值{NB,NM,NS,Z,PS,PM,PB},各语言值的隶属函数采用三角函数,其分布可用表1表示,控制规则如表2所示。
注意:u的去模糊化要采用与你的学号ID的奇偶性对应的方法,设ID=奇数者用最大隶属度法,ID=偶数者用重心法;要有计算查询表时的必要计算步骤,不能只给出最后结果。
表2模糊控制规则表程序设计与程序流程图1、模糊算法的选择模糊蕴含用求交法,输出量的清晰化计算用最大隶属度法。
于是有输出量的模糊集合'U 为:491'491''491''491''491''''')]([)]([])[()()()(=======→→=→⨯⨯=⨯=⨯=i ii iEC iE i i i i i i i i i i iCU U U EC EC U E EU EC E EC E R EC E R EC E U2、程序结构说明利用Matlab 编写该模糊算法,并且计算出模糊控制器的查询表。
程序按照上面的控制算法,先计算模糊关系隶属度矩阵R 。
通过上面的式子,根据每一条控制规则,查找相对应的赋值表当中的向量值。
如第一条法则:If E=NB and EC=NB, then U=NB.则找到E 中NB 对应的行向量和EC 中NB 对应的行向量,然后将第一个行向量转置后与第二个行向量按照乘法法则对应取小值,生成新的矩阵。
智能控制模糊控制仿真大作业
智能控制模糊控制仿真大作业一、前言智能控制模糊控制仿真大作业是在智能控制课程中的一项重要任务,旨在让学生通过实践来深入理解模糊控制的原理和应用。
本文将从以下几个方面详细介绍智能控制模糊控制仿真大作业的相关内容。
二、作业背景智能控制是一种基于人工智能技术的自动化控制方法,它可以通过对系统进行学习和优化来提高系统的性能和鲁棒性。
而模糊控制则是智能控制中的一种重要方法,它可以通过对输入输出之间的关系进行建模来实现对系统的控制。
因此,深入了解模糊控制的原理和应用对于学习智能控制具有重要意义。
三、作业要求本次大作业要求学生使用MATLAB/Simulink软件来设计一个基于模糊逻辑的温度调节系统,并进行仿真验证。
具体要求如下:1. 设计一个基于PID算法和模糊逻辑的温度调节系统;2. 利用Simulink软件构建该系统,并进行仿真验证;3. 对比分析PID算法和模糊逻辑在温度调节系统中的控制效果;4. 撰写实验报告,详细介绍设计思路、仿真结果以及分析结论。
四、作业流程1. 确定系统需求和参数首先,需要确定温度调节系统的需求和参数。
例如,设定目标温度为25摄氏度,系统初始温度为20摄氏度,采样时间为0.1秒等。
2. 设计PID控制器接下来,设计PID控制器。
PID控制器是一种经典的控制方法,在工业自动化控制中得到广泛应用。
其基本原理是通过对误差信号、误差积分和误差微分进行加权组合来得到输出信号。
3. 设计模糊逻辑控制器然后,设计模糊逻辑控制器。
模糊逻辑控制器是一种基于模糊集合和模糊推理的控制方法。
其基本原理是将输入变量映射到一个或多个模糊集合上,并通过一系列规则来推导出输出变量的值。
4. 构建Simulink模型并进行仿真验证接下来,利用Simulink软件构建温度调节系统,并将PID控制器和模糊逻辑控制器分别加入到系统中。
然后,进行仿真验证,比较两种控制方法的控制效果。
5. 分析结果并撰写实验报告最后,对比分析PID算法和模糊逻辑在温度调节系统中的控制效果,并撰写实验报告,详细介绍设计思路、仿真结果以及分析结论。
3-5模糊逻辑控制及其应用
8
传 统 控 制 方 法 的 局 限 性
2.传统控制方法的局限性 . 若用计算机实现传统控制方法: 若用计算机实现传统控制方法: A. 首先要设定控制目标值。 首先要设定控制目标值。 B. 根据被控对象的特性变化和环 境变化,通过负反馈原理, 境变化,通过负反馈原理,不断进行 调节,以跟踪所设定的目标值。 调节,以跟踪所设定的目标值。 C. 设计一个满足控制目标的控制 必须要有数学模型。 器,必须要有数学模型。 实际上有很大困难, 实际上有很大困难,特别是对复 杂的非线性系统和多因素的时变系统。 杂的非线性系统和多因素的时变系统。
知识工程学+ 知识工程学+模糊推理
19
预 测 型 模 糊 控 制 法
2. 预测型模糊控制法 . 知识工程学 + 模糊推理 + 通过对被控对象动态特性的 模拟而建立的系统模型 即: 预测型模糊控制法 = 状态估计模糊控制法 + 通过对被控对象动态特性的 模拟而建立的系统模型。 模拟而建立的系统模型。
16
规 则 的 形 成 和 推 理
2.模糊规则的形成和推理: .模糊规则的形成和推理: 模糊规则的形成: 模糊规则的形成: 把有经验的操作人员或专家的 控制知识和经验, 控制知识和经验 , 制定出若干个 模糊控制规则, 模糊控制规则 , 并加以形式化数 字处理以后,存入计算机。 字处理以后,存入计算机。 这些规则可以用自然语言来表 达。 根据模糊集合和模糊关系理论, 根据模糊集合和模糊关系理论 , 对于不同类型的模糊规则, 对于不同类型的模糊规则 , 可以 用不同的模糊推理方法。 用不同的模糊推理方法。
13
模 糊 逻 辑 控 制 系 统 结 构
14
给 定 值 R + -
利用模糊逻辑进行自动控制
利用模糊逻辑进行自动控制自动控制是现代工业制造的重要手段之一,它可以有效提高工厂的生产效率,降低操作人员的劳动强度。
而模糊逻辑则是一种非常重要的数学工具,能够模拟人类的认知过程,应用于自动控制中,可以帮助控制系统自主学习和自我调整,使其更加智能化和灵活化。
模糊逻辑是一种基于模糊集合的逻辑推理方式。
相比于传统的二值逻辑,模糊逻辑更加贴近人类的认知方式。
在模糊逻辑中,每个元素都可以属于多个不同的模糊集合,并且每个模糊集合都可以有不同的隶属度。
这种灵活性使得模糊逻辑可以有效地处理一些复杂的实时控制问题。
利用模糊逻辑进行自动控制的过程可以分为三个主要步骤:建立模糊控制器、获取反馈信息、进行控制决策。
第一步是建立模糊控制器。
模糊控制器通常由模糊规则库、模糊推理机和模糊输出器组成。
模糊规则库是由一组模糊规则所组成的,每个规则包含若干个前提条件和一个结论。
模糊推理机是负责利用模糊规则库中的规则对输入进行模糊推理和模糊匹配的模块。
模糊输出器则将模糊推理的结果转化成具体的动作输出。
第二步是获取反馈信息。
在自动控制中,获取设备的状态是至关重要的。
传感器是用于获取设备状态的重要硬件设备。
对于一些复杂的系统,可能需要多种不同类型的传感器才能获取到全面的设备状态。
获取到设备状态后,通过数据处理可以得到各项控制参数的具体数值。
这些控制参数可以作为输入提供给模糊控制器进行处理。
第三步是进行控制决策。
在获取到完整的状态信息后,模糊控制器通过模糊推理机对输入进行模糊推理和模糊匹配,生成具体的控制动作输出。
这些控制动作被传递到执行机构,例如电机、液压马达等,从而改变设备的状态。
基于模糊逻辑进行自动控制可以有效地提高控制系统的精度。
在传统控制方式中,往往需要通过一些复杂的数学模型对控制系统进行建模,然后再应用控制理论进行控制。
这个过程比较繁琐,而且需要很高的控制理论水平。
而在模糊控制中,不需要事先建立准确的数学模型,只需要建立一组模糊规则就可以了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《智能控制技术》平时作业题
2016年4月1日
学号______________ 姓名
题一: 设被控对象的传递函数为
21()1000441)
G s s s =++ (1)针对阶跃输入()5/R s s =,设计模糊监督PID 控制系统,使
得系统输出的超调量2%δ≤,进行系统仿真。
(2)已知条件和性能指标同(1),设计模糊监督模糊控制系统,进行系统仿真,同(1)的仿真结果进行比较。
题二:设被控对象的传递函数为
p
22p p p ()2K G s s s ζωω=++ 式中,P 1K =,P 0.707ζ=,P 1ω=。
参考模型为一阶系统
r r ()K M s s a =+,r
1K =,r 1a =。
系统参考输入为()sin(0.6)r t t =。
(1)针对()G s 设计一个直接模糊控制器(非自适应),使得对
象的输出尽可能接近参考模型的性能指标。
模糊控制器为二维模
糊控制器,其输入变量为偏差e r y =-,r 为系统参考输入,y 为被控对象输出;偏差变化()()()e kT e kT T e
kT T
--= (用一阶后向差分近似)。
(2)针对()G s 设计模糊模型参考学习自适应控制系统,使得对
象输出跟踪参考模型输出并尽可能地靠近它。
将(1)中所设计的模糊控制器作为初始模糊控制器并为FMRLC(模糊模型参考学习控制)所调整,进行系统仿真。
题三:使用模糊逻辑工具箱建立以下模糊推理系统。
(1)单输入单输出模糊推理系统:输入、输出变量分别为e和u,其模糊集论域均为[-1,1],语言变量取值[N,ZO,P],隶属函数为对称三角形,规则为
If e is N Then u is N
If e is ZO Then u is ZO
If e is P Then u is P
画出该模糊推理系统输入输出关系曲线。
(2)两输入一输出模糊推理系统:输入变量e和e ,输出变量为u,其模糊集论域均为[-6,6],语言变量取值[NL,NS,ZO,PS,PL],隶属函数为对称三角形;规则前件及蕴涵均采用“取小”运算。
设计25条控制规则;求出该推理系统的控制面。
(3)采用高斯形隶属函数,重复上述(2)。
题四:已知某被控对象的传递函数为
2.5
()
(101)
G s
s s
=
+。
(1)采用二维PD模糊控制器,输入变量e和e ,输出变量为u,其模糊集论域均为[-6,6],语言变量取值[NL,NM,NS,ZO,PS,PM,PL],隶属函数为对称三角形;规则前件及蕴涵均采用“取小”运算,采用COG反模糊化方法。
用Simulink建立单位
反馈仿真系统,适当调整模糊控制器的增益系数e K ,c K 及u K ,求出系统的阶跃响应曲线;
(2)已知条件同条件(1),求系统单位斜坡输入时的系统响应曲线,分析系统响应曲线,分析系统响应曲线是否有静态偏差存在,为什么?
(3)已知条件同条件(1),针对单位斜坡输入,要求系统无静态偏差,该怎样设计模糊控制器?设计相应的模糊控制器并进行系统仿真。