系统元件设计.
PLC控制系统设计的基本内容

PLC控制系统设计的基本内容1.总体方案的确定熟悉控制对象和控制要求,分析控制过程,确定总体方案。
2.正确选用电气控制元件和PLCPLC控制系统是由PLC、用户输入及输出设备、控制对象等连接而成的。
应认真选择用户输入设备(按钮、开关、限位开关和传感器等)和输出设备(继电器、接触器、信号灯、电磁阀等执行元件)。
要求进行电气元件的选用说明,必要时应设计好系统主电路图。
根据选用的输入/输出设备的数目和电气特性,选择合适的PLC。
PLC是控制系统的核心部件,对于保证整个控制系统的技术经济性能指标起着重要作用。
选择PLC应包括机型、容量、I/O点数、输入/输出模块(类型)、电源模块及特殊功能模块等的选择。
3.分配I/O端口根据选用的输入/输出设备、控制要求,确定PLC外部I/O端口分配。
(1)作I/O分配表,对各I/O点功能作出说明。
(2)画出PLC外部I/O接线图,依据输入/输出设备和I/O口分配关系,画出I/O接线图。
接线图中各元件应有代号、编号等,并在电气元件明细表中注明规格数量等。
4.PLC控制流程图及说明绘制PLC控制系统程序流程图,完成程序设计过程的分析说明。
5.程序设计利用CX-Programmer编程软件编写控制系统的梯形图程序。
在满足系统技术要求和工作情况的前提下,应尽量简化程序,尽量减少PLC的输入/输出点,设计简单、可靠的控制程序。
注意安全保护(检查联锁要求、防误操作功能等能否实现)。
6.调试、完善控制程序(1)利用CX-Programmer在计算机上仿真运行,调试PLC控制程序。
(2)让PLC与输入及输出设备联机进行程序调试。
调试中对设计的系统工作原理进行分析,审查控制实现的可靠性,检查系统功能,完善控制程序。
控制程序必须经过反复调试、修改,直到符合要求为止。
7.撰写设计报告设计报告内容中应有控制要求、系统分析、主电路、控制流程图、I/O分配表、I/O接线图、内部元件分配表、系统电气原理图、用CX-Programmer打印的PLC程序、程序说明、操作说明、结论、参考文献等。
液压元件与系统设计

风冷式冷却器
利用空气作为冷却介质, 适用于较低温度的冷却, 结构简单,但冷却效果相 对较差。
热管式冷却器
利用热管原理进行热量传 递,具有高效、紧凑的特 点,但制造成本较高。
过滤器的选择与应用
过滤器精度
根据液压系统对油液清洁 度的要求,选择合适精度 的过滤器,以保证油液的 清洁度。
类型
方向控制阀包括单向阀、换向阀等,其中换向阀是最常用的方向控制阀。
压力控制阀的选择与应用
选择
压力控制阀的选择应根据系统的压力和流量需求,以及使用环境和工况条件等因 素综合考虑。
应用
压力控制阀在液压系统中主要用于调节和稳定液压系统的压力,以保护系统中的 元件并确保系统的正常运行。
05 液压辅件与附件
油箱的设计与制作
油箱容量
根据系统需求,确定合适的油箱容量,既要满足 系统运行需求,也要避免过大容量造成的浪费。
结构设计
油箱应设计合理,便于安装、维护和清洗,同时 要保证足够的强度和稳定性。
通风设计
为了防止油温过高,油箱应设计通风口,以便于 散热和空气流通。
冷却器的种类与特点
01
02
03
水冷式冷却器
01
总结词
系统方案的制定
03
总结词
系统性能的仿真与优化
05
02
详细描述
在开始设计液压系统之前,需要进行需求分 析、确定技术要求和参数,并选择合适的液 压元件。
06
04
详细描述
根据需求和技术要求,制定合理的液 压系统方案,包括确定液压元件的型 号、规格和数量,以及系统的布局和 连接方式。
自动化控制系统的设计与优化

自动化控制系统的设计与优化自动化控制系统的设计与优化是现代工程领域中的重要问题之一。
随着科技的不断进步和工业化程度的提高,自动化控制系统在各个领域中起到了越来越重要的作用。
本文将就自动化控制系统的设计与优化展开讨论,涵盖了系统设计的要点以及优化方法的应用。
一、自动化控制系统的设计自动化控制系统的设计是指通过合理的电子元器件和控制算法的选择,构建能够自动控制和调节系统运行状态的一个整体系统。
设计一个好的自动化控制系统需要考虑以下几个方面:1. 系统结构设计:确定系统的功能模块和各个模块之间的关联关系。
一般来说,自动化控制系统包括输入传感器、控制器、执行器和输出等组成部分。
根据实际情况选择和设计这些组件的类型和数量,确保系统能够满足所需的功能和性能要求。
2. 控制算法设计:选择合适的控制算法来实现系统的控制目标。
常见的控制算法包括比例积分微分(PID)控制算法、模糊控制算法和模型预测控制算法等。
根据系统的特点和要求选择适合的控制算法,并进行参数调优,以达到系统的最佳控制效果。
3. 电子元器件的选择与布局:根据系统需求和性能要求选择合适的电子元器件,包括传感器、执行器、控制器等。
同时,合理规划和布局这些元器件的位置和连接方式,确保信号传输的可靠性和稳定性。
二、自动化控制系统的优化自动化控制系统的优化是指通过对系统参数和控制算法的调整,以进一步提高系统的控制性能和效率。
常见的优化方法包括以下几个方面:1. 参数调优:对控制算法的参数进行合理的调整,使系统响应速度更快、稳定性更好,并减小系统的超调和振荡。
通过分析系统的数学模型和仿真实验,可以确定最优的参数组合。
2. 影响因素分析:分析系统中可能影响性能的各个因素,如时滞、噪声、传感器误差等,并采取措施来减小这些影响因素对系统性能的影响。
例如,可以通过滤波技术来降低噪声的干扰,或者通过增加冗余传感器来提高系统的可靠性。
3. 系统结构优化:对系统的结构进行调整和改进,以提高系统的性能和效率。
PLC控制系统硬件设计

5.1 控制系统的设计步骤和PLC选型
一、控制系统的设计步骤 7)联机调试
联机调试是将通过模拟调试的程序进一步进行在线统调。联机 调试过程应循序渐进,从PLC只连接输入设备、再连接输出设备 、再接上实际负载等逐步进行调试。如不符合要求,则对硬件和 程序作调整。通常只需修改部份程序即可。
全部调试完毕后,交付试运行。经过一段时间运行,如果工作 正常、程序不需要修改,应将程序固化到EPROM中,以防程序 丢失。 8)整理和编写技术文件
减少输入点数方法
合并输入
将某些功能相同的开关量输入设备合并输入。如果是几个常闭触点,则 串联输入;如果是几个常开触点,则并联输入。
某些输入设备可不进PLC
有些输入信号功能简单、 涉及面很窄,有时就没有必要 作为PLC的输入,将它们放在 外部电路中同样可以满足要求。
29
5.3 PLC输入/输出电路设计
2
5.1 控制系统的设计步骤和PLC选型
一、控制系统的设计步骤
1)分析被控对象并提出控制要求 详细分析被控对象的工艺过程及工作特点,了解被控
对象机、电、液之间的配合,提出被控对象对PLC控制系 统的控制要求,确定控制方案,拟定设计任务书。 2)确定输入/输出设备
根据系统的控制要求,确定系统所需的全部输入设备 (如:按纽、位置开关、转换开关及各种传感器等)和 输出设备(如:接触器、电磁阀、信号指示灯及其它执 行器等),从而确定与PLC有关的输入/输出设备,以确 定PLC的I/O点数。
小范围较宽、导通压降小,承受瞬时过电压和过电流的能力较强,但 动作速度较慢(驱动感性负载时,触点动作频率不超过1HZ)、寿命 较短、可靠性较差,只能适用于不频繁通断的场合。
对于频繁通断的负载,应该选用晶闸管输出或晶体管输出,它们 属于无触点元件。但晶闸管输出只能用于交流负载,而晶体管输出只 能用于直流负载。
电子系统设计
什么是系统?•由部件组成,能实现较复杂的功能(不是一个单一的电路,要有输入、输出和其他控制电路)(只能实现单一功能的通常不算系统)系统设计的方法自顶向下自底向上自顶向下与自底向上相结合何谓顶?顶——系统的功能何谓底?底——最基本的元、器件,甚至是版图系统的结构•自顶至底有:系统子系统部件(功能模块)单元电路元、器件版图系统子系统子系统功能模块功能模块功能模块功能模块单元电路单元电路单元电路单元电路单元电路单元电路单元电路单元电路元、器件版图自顶向下自上而下法的优点••系统子系统子系统功能模块功能模块功能模块功能模块单元电路单元电路单元电路单元电路单元电路单元电路单元电路单元电路元、器件版图自顶向上自底向上的缺点•部件设计在先,设计系统时将受这些部件的限制,影响:•系统性•易读性•可靠性•可维护性自底向上的优点•在系统的组装和调试过程中有效•可利用前人的设计成果系统子系统子系统功能模块功能模块功能模块功能模块单元电路单元电路单元电路单元电路单元电路单元电路单元电路单元电路元、器件版图以功能模块为基础的自上而下的设计方法自上而下法的要领从顶层到底层从概括到展开从粗略到精细系统级子系统级部件级元件级自顶向下自底向上自上而下法的原则•正确性与完备性•模块化与结构化•问题不下放•高层主导•直观性与清晰性原始技术指标系统级子系统级部件级元件级电子系统设计的步骤•••••调查研究•明确设计要求•弄清设计方法•了解设计关键做什么?系统的功能输入和输出做到何种程度?性能技术指标注意分析每一个细节,尽量考虑得周到、完善调查研究•明确设计要求•弄清设计方法•了解设计关键有那些可使用的设计方法相同产品同类产品同原理产品其他可借鉴的方法比较各种方法的先进性性价比可行性器材人才时间产品效益与开发时间的关系上市延迟销售顶峰销售顶峰电子系统设计的步骤•••••调查研究•明确设计要求•弄清设计方法•了解设计关键决定指标的关键难点工作量大(重点)方案论证从顶层到底层从概括到展开从粗略到精细逐层细化Y 图系统级子系统级部件级元件级行为级结构级物理级用户需求变为技术规范与功能描述实现给定规范与功能的子系统、部件或元件及其互联方式用一定的材料与工艺实现结构系统级子系统级部件级元件级行为级结构级物理级子系统级部件级元件级结构级物理级子系统级部件级元件级结构级物理级方案论证•起点:•系统级行为描述设计•用户需求•系统技术规范•功能描述系统级行为描述设计•系统的外部特性•主要功能•输入和输出——•那些端口•输入(输出)信号——•特征•来源(去向)•对系统的要求初步方案面板图子系统级部件级元件级行为级结构级物理级方案论证•下一步:•系统级的结构描述与设计•系统设计规范与功能•子系统之间的组合•系统的内部特性——•基本原理•基本框图——•子系统•各子系统之间的接口要求•基本控制流程基本框图基本流程图•系统的内部特性——•基本原理•基本框图——•子系统•各子系统之间的接口要求•基本控制流程系统的实现技术用数字技术,还是模拟技术实现?模拟技术数字技术高频小信号大功率软件离不开硬件支持DSP(数字信号处理)系统级子系统级部件级元件级行为级结构级物理级•第三步:•系统级的物理描述与设计•组成系统的各抽象的子系统•各具体的子系统(IP )•提出具体的要求并转入•下一层设计方案论证Intellecture Property 知识产权系统级子系统级部件级元件级行为级结构级物理级方案论证•下一层:•子系统级行为描述设计•对子系统的需求•子系统技术规范•功能描述系统级子系统级部件级元件级行为级结构级物理级方案论证•下一步:•子系统级的结构描述与设计•子系统设计规范与功能•功能模块(部件)•之间的组合•第三步:•子系统级的物理描述与设计•组成子系统的各抽象的模块•选择具体的功能模块或•对模块提出具体的要求并•转入下一层设计方案论证没有现成模块可用的特殊模块关键模块、关键元件及相互接口以模块为单位的详细框图方案论证•下一层:•部件级行为描述设计•对部件(模块)的需求•部件的技术规范•功能描述方案论证•下一步:•部件级的结构描述与设计•部件设计规范与功能•单元电路之间的组合方案论证•第三步:•部件级的物理描述与设计•抽象的单元电路•选用具体的单元电路电子系统设计的步骤•••••。
元器件设计知识点汇总
元器件设计知识点汇总元器件设计是电子工程领域中的重要环节,涵盖了电路设计、电子元器件的选型与应用等方面。
本文将对元器件设计中的关键知识点进行汇总和介绍,以帮助读者更好地理解和应用于实际工作中。
一、电路基础知识1.1 电子元器件分类电子元器件可根据其功能和性能特点进行分类,主要包括:被动元器件(如电阻器、电感器和电容器等)、半导体器件(如二极管、晶体管和三极管等)和集成电路等。
1.2 电路图符号电路图符号是一种标准化的图形表示方式,用于描述电子元器件在电路中的连接方式。
常见的电路图符号有电源、电阻、电容、电感、二极管等,设计师需要熟悉并掌握这些符号的含义和使用方法。
1.3 电压、电流和电阻在元器件设计中,电压、电流和电阻是基本的物理量。
电压(V)指电荷单位移动时所产生的能量差异,电流(I)指单位时间内通过导体的电量,而电阻(R)则表示导体对电流流动的阻碍程度。
二、电子元器件选型与应用2.1 元器件参数理解元器件参数是评估元器件性能的依据,其中包括静态参数(如电压、电流和功耗等)和动态参数(如响应时间、频率响应等)。
设计师需要根据具体需求合理选择元器件,以满足电路设计的要求。
2.2 元器件的可靠性元器件的可靠性是评估元器件使用寿命和稳定性的重要指标。
常见的元器件可靠性参数包括失效率、平均寿命和故障模式等。
设计师应了解不同元器件的可靠性指标,并根据应用场景选择合适的元器件。
2.3 元器件布局与热管理元器件布局和热管理是保证电路正常运行的重要因素,合理的布局可以降低电磁干扰和热耗散,提高系统可靠性。
设计师需要综合考虑元器件的散热特性,采取适当的散热措施,如散热片、风扇等。
三、常用元器件介绍与应用3.1 电源与稳压器件电源与稳压器件是电子系统中不可或缺的组成部分。
常见的电源包括直流电源、交流电源和脉冲电源等,稳压器件则可确保电源输出稳定的电压和电流。
3.2 传感器与检测器件传感器与检测器件用于测量和检测物理量或信号,广泛应用于各个领域。
生物元件设计的基本原理及应用

生物元件设计的基本原理及应用随着生物学和工程学的不断发展,基因工程及生物元件设计已经成为计划合成生物学中的重点领域,而生物元件作为生物系统中的基本构件,在基因工程和合成生物学领域扮演着举足轻重的角色。
本文将介绍生物元件的基本概念、种类、设计原则以及应用。
一、生物元件的概念和种类生物元件是指一类能够表达特定功能、可重现且可定量测量的分子序列或结构。
一般来说,生物元件可以分为蛋白质元件和核酸元件。
其中,蛋白质元件包括酶、转录因子、激活剂和抑制剂等,它们通过与其他组分相互作用,实现基本的生命过程,如代谢、信号传递等;核酸元件则包括调节子、启动子、引导序列和结构元件等,它们主要参与基因表达的调控和修饰。
二、生物元件的设计原则从设计原则上看,生物元件可以分为传统的序列组合设计、结构基础设计和进化驱动设计三类。
传统的序列组合设计主要依靠人为精心设计出特定的 DNA 序列,这些序列可以激活或抑制特定的基因表达,实现不同的生物功能。
结构基础设计则主要基于结构优化,设计出能够实现特定生物功能的分子结构。
进化驱动设计则是以自然进化过程为基础,基于遗传编码和突变筛选等机制,从生物进化的角度出发,设计出能够实现特定功能的分子序列。
不论采用何种方式,生物元件的设计原则主要应符合以下几个方面的要求:1. 物理或化学稳定性在设计生物元件时,需要注意是否能够在特定的温度、酸碱条件等物理或化学环境下保持稳定,以确保其在实际应用中能够正常发挥作用。
2. 可重现性和可定量化生物元件的设计应考虑其是否能够在不同实验条件下重复和定量测量。
这一点尤其关键,因为只有可重复和可定量的实验结果才能够为后续的研究提供可靠的数据支持。
3. 特异性生物元件的特异性是指其是否能够只与特定的分子结合或反应,并排除其他分子的干扰。
在实际应用中,如果生物元件与其他分子的结合或反应也相当强烈,就会导致实验结果不准确或应用价值降低。
三、生物元件的应用由于自身具有物理和化学性质的可调节性,生物元件已经被广泛应用于生物医学、工业生产和科学研究等领域。
用Simulink模拟物理过程的微系统元件的设计和开发
用Simulink模拟物理过程的微系统元件的设计和开发Simulink是一种广泛使用的工具,可以用于建立和模拟各种各样的物理系统。
很多人利用Simulink进行控制系统的设计和开发,但是,它并不仅限于此。
实际上,Simulink也可以用于模拟微系统元件的设计和开发。
微系统元件,又称为微纳机电系统(MEMS),是一种集成电路(IC)上的微小传感器和执行器。
这些元件可以在小于一毫米的尺度范围内工作,因此被称为微型设备。
微系统元件广泛应用于各种行业,例如医疗保健、工业生产和航空航天。
Simulink可以用于建立微系统元件的虚拟模型,并模拟实际物理过程。
这些模型可以用于预测微系统元件的行为,并对其进行设计和优化。
下面,我们将讨论如何利用Simulink模拟物理过程的微系统元件的设计和开发。
1. 模型建立在建立模型之前,需要对微系统元件的物理过程进行仔细的研究和分析。
例如,如果要建立一个微型加速度计,需要知道其工作原理和信号输出的特性。
只有充分了解微系统元件的特性,才能够建立准确的虚拟模型。
建立微系统元件的模型通常需要使用多个Simulink块。
每个块提供了模拟微系统元件的不同方面,例如运动学、动力学、信号处理和控制。
这些块可以通过拖拽和连接来建立模型。
2. 模型仿真建立好模型之后,就可以进行仿真了。
使用Simulink的仿真功能,可以模拟微系统元件在各种不同条件下的行为。
例如,可以模拟微型加速度计在震荡环境下的特性,或者模拟在不同温度下的传感器输出。
通过仿真,可以利用Simulink的数据可视化功能来获取微系统元件的数值模拟结果。
这些数据可以用于分析微系统元件的行为,并对其进行进一步的设计和优化。
3. 设计优化利用仿真结果和分析,可以发现微系统元件存在的问题,并进行进一步的设计优化。
例如,如果加速计的传感器输出受到噪声污染,可以改变信号处理块的参数,以减少噪声的影响。
或者,在模拟过程中发现微系统元件的响应速度过慢,可以通过改变执行器的极性和电流来提高响应速度。
机械设计中的气动系统设计

机械设计中的气动系统设计气动系统在机械设计中扮演着重要的角色,能够为机械装置提供动力和控制功能。
在本文中,我们将讨论气动系统设计的关键方面,包括气动元件的选择、气动系统的布局、气动系统的分析和优化。
一、气动元件的选择气动元件是气动系统中的基本组成部分,用于转换气动能量为机械能量。
常见的气动元件包括气缸、气源处理单元、方向控制阀和执行器等。
在选择气动元件时,需要考虑以下因素:1. 动力需求:根据机械装置的动力需求选择合适的气缸和气源处理单元。
气缸的尺寸和压力能力应满足机械装置的工作要求,而气源处理单元则用于提供干净、稳定的气体供应。
2. 控制要求:根据机械装置的控制要求选择合适的方向控制阀。
方向控制阀用于控制气缸的运动方向和速度,应能够准确、快速地响应控制信号。
3. 可靠性和维护性:选择具有良好可靠性和维护性的气动元件,以确保气动系统的稳定运行和便捷的维护。
二、气动系统的布局气动系统的布局对于整个机械装置的性能和效率至关重要。
在布局气动系统时,应考虑以下几个方面:1. 管道布置:合理布置气动系统的管道可以降低气体运动的阻力和能量损失。
尽量缩短气源到气动元件的管道长度,减少弯头数量,采用光滑的管道材料。
2. 储气装置:根据机械装置的气动能量需求,选择合适的储气装置。
储气装置可以平衡气动系统的供气压力,保证气动元件的正常运行。
3. 控制单元布置:将方向控制阀和执行器布置在合适的位置,以便于操作和维护。
同时,要保证控制信号传输的可靠性,避免干扰和误操作。
三、气动系统的分析和优化在设计气动系统时,需要进行系统性能分析和优化,以提高机械装置的效率和性能。
1. 动力分析:通过对气动系统的动力性能进行分析,了解气缸的工作压力、速度和力的变化规律。
根据分析结果,优化气动元件的选择和布局,以提高气动系统的动力输出。
2. 控制分析:通过对方向控制阀和执行器的响应时间和准确性进行分析,优化控制信号的传输和气动元件的控制能力。
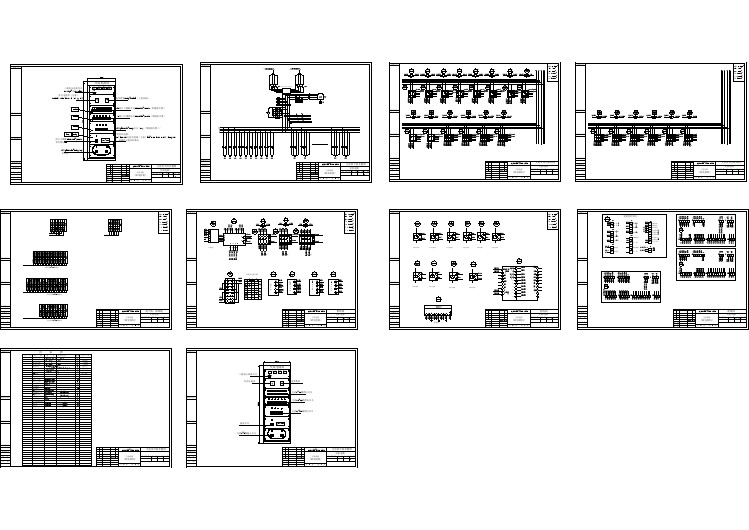
交流电源系统设计图、接线图、元器件材料原理布置图
合成生物学元件设计

合成生物学元件设计合成生物学元件设计随着生物技术的快速发展,合成生物学作为新兴交叉学科,已经成为一种热门领域。
在这个领域中,元件的设计是非常重要的一个环节,因为它决定了整个生物系统的功能表现。
下面,我们就对合成生物学元件设计进行重新整理。
一、合成生物学元件的定义合成生物学元件是指一组在生物学中经常使用的模块化基本组件,能够帮助人们构建新的生物系统,或者修改或优化既有的生物系统。
这些元件可以被看作是一种独立的模块,即一个“黑匣子”,接口上遵循标准化,可被组装到较复杂的系统中。
二、合成生物学元件的分类根据功能和结构特性,可以将合成生物学元件分为四类:1.遗传调控元件:主要包括启动子、调控因子、RNA干扰元件等。
2.信号转导元件:主要包括感受器、信号传输桥梁等。
3.代谢途径元件:主要包括代谢酶、物质转运蛋白等。
4.信号输出元件:主要包括报告基因、标记物等。
三、合成生物学元件的设计思路1.选择适当的模块:要根据所需的功能,选择对应的模块,例如选择适当的启动子来进行基因表达。
2.设计合适的序列:根据模块的基本特性,设计出合适的序列,例如基因启动子的长度、核酸序列、RNA结构等。
3.进行功能验证:在实验室中,通过适当的实验验证功能,例如利用荧光素酶标记,在细胞中查看基因表达情况。
4.优化元件设计:在实验中发现问题,需要根据问题进行优化设计。
四、合成生物学元件的应用范围通过合成生物学元件的设计、改造和优化,人们可以构建新型合成微生物、改造现有微生物、定向改良生物代谢途径、制备新的抗生素、产生新型的生物燃料和生物质等。
此外,合成生物学元件还有广泛的应用于生物传感器、生物计算和生物医学研究等领域。
总之,合成生物学元件是合成生物学的核心组成部分,它的设计、制作和应用将为各领域的生物技术进步作出重大贡献。
第3章 机电一体化系统的执行元件的选择与设计

二、对执行元件的基本要求
1. 惯量小、动力大
11
2.体积小、重量轻 既要缩小执行元件的体积、减轻重量,同时又要增大其动力,故通常用
执行元件的单位重量所能达到的输出功率或比功率,即用功率密度 或比功 率密度来评价这项指标。设执行元件的重量为G,则
当t=T/6时,U相电流为正,由U1端流向U2端,V相电流为负,由V2端 流向V1端,W相电流为零所形成的磁场,也是一个两极磁场,但N、S极的 轴线在空间顺时针方向转了60°。
转子转动
直流电
同 步 电 机
永磁型(SM)
励磁型(IM)
同步电机将永磁体或励磁线圈装在转子上,定子上装有绕组。三相 交流电流通过定子绕组,在定子上产生旋转磁场。旋转磁场与转子磁场 相互作用驱动转子转动。
12
第二节 常用的控制用电动机
电动式的执行元件由于 其操作简单、编程容易、易 于实现计算机控制,因此电 动机在机电一体化中应用的 最为广泛。
一、 电动机的种类、特点及选用
在机电一体化系统(或产品)中使用两类电动机,一类为一般的动力 用电动机,如感应式异步电动机和同步电动机等;另一类为控制用电动 机,如力矩电动机、脉冲电动机、开关磁阻电动机、变频调速电动机和 各种AC/DC电动机等,下图为常用电动机的适用范围。
42
此类电动机的转子结构简单、转子直径小,有利于高速响应。由于VR型 步进电机的铁心无极性,故不需改变电流极性,因此多为单极性励磁。
43
2)永磁型(PM-Permanent Magnet)
永磁(PM)型步进电机的转子2 采用永久磁铁、定子1采用软磁钢 制成,绕组3轮流通电,建立的磁 场与永久磁铁的恒定磁场相互吸引 与排斥产生转矩。其结构如右图所 示。这种电动机由于采用了永久磁 铁,即使定子绕组断电也能保持一 定转矩,故具有记忆能力,可用做 定位驱动。PM型电动机的特点是励 磁功率小、效率高、造价低,因此 需要量也大。由于转子磁铁的磁化 间距受到限制,难于制造,故步距 角较大。与VR型相比转矩大,但转 子惯量也较大。
汽车电子嵌入式系统设计(7)零缺陷的汽车等级元件

汽車零件首重品質一台汽車是由許許多的零件組成,這些零件雖然有大有小,但由汽車的行駛與生命安全息息相關,因此每個零件都被要求能達到最高的品質與可靠性,甚至能做到零缺陷(Zero Defect)的理想境界。
在汽車產業中,汽車零件品質管控的重要性往往凌駕於零件的功能特性,這與消費性電子的需求就形成很大的對比。
也就是說,對於汽車零件而言,產品的最大推動力往往不是「先進技術」,而是「品質水準」。
為了達到對品質要求的提升,就得靠一系列的嚴格管控程序來把關。
目前汽車產業中已發展出幾個重要的品質管理系統與相關規範,包括由汽車電子設備委員會(Automotive Electronics Council,AEC)所提出的各項規範,以及QS-9000和TS 16949等。
此外,元件供應商也會基於這些規範提出自己的一套管控作法,如ST的汽車等級認證(Automotive Grade Qualification)。
本文將介紹這些管理方法的重要內容。
AEC系列規範汽車電子委員會(AEC)在一開始時是由克萊斯勒、福特和通用汽車 / Delco Electronics所共同成立,目的是要建立通用零件資格及品質系統標準,一方面除了控制品質外,也推動汽車電子零件的通用性,以加速此市場的成長。
只要是符合AEC規範的零件,就意味著可同時被上述三家車廠所採用,這也讓零件製造商更願意交換其產品特性資料。
AEC的第一個標準是專門用於晶片應力測試(Stress Test)的認證規範:AEC-Q100,在此文件的開發過程中,重要的晶片供應商都有機會提出他們的意見。
AEC-Q100首次發表於1994年6月,經過十多年的發展後,AEC-Q100已成為汽車電子系統的通用標準,只要被認定為符合此規範要求的電子元件,就被接受是適用於使用環境複雜的汽車應用當中,具備高品質與可靠性的產品。
這些元件不需再反覆進行循環式的認證測試,因而能更快速的滿足汽車市場的採購需求。
电子元器件系统设计报告

电子元器件系统设计报告1. 引言本报告旨在介绍电子元器件系统的设计过程及结果。
我们设计的电子元器件系统旨在满足特定需求,并提供稳定可靠的性能。
报告将包括系统设计的背景、需求分析、设计方法、硬件设计规格、软件设计规格以及系统性能评估等内容。
2. 背景电子元器件是现代电子设备的重要组成部分,在各个领域都有广泛的应用。
由于市场对性能和功能的要求日益提高,我们需要设计一个高效且具有较高综合性能的电子元器件系统。
3. 需求分析基于对市场需求和用户反馈的分析,我们对电子元器件系统的需求进行了详细分析。
以下是我们的需求分析:1. 性能要求:电子元器件系统应具有高性能的处理能力和响应速度,能够在高负荷和复杂环境下稳定运行。
2. 功能要求:电子元器件系统应支持多种功能,包括数据采集、信号传输、信号处理等。
3. 稳定性要求:电子元器件系统应具有较高的稳定性和可靠性,能够在长时间工作和极端环境下保持正常运行。
4. 成本要求:电子元器件系统设计成本应尽量控制在合理范围,以满足市场竞争的要求。
4. 设计方法针对上述需求,我们采用了以下设计方法:1. 系统划分:根据功能需求,将电子元器件系统划分为不同的模块,每个模块负责不同的功能。
2. 模块设计:对每个模块进行详细设计,包括硬件设计和软件设计。
硬件设计主要考虑电路原理图和PCB设计,软件设计主要考虑嵌入式系统的程序开发。
3. 集成测试:对各个模块进行集成测试,确保它们能够正常协同工作。
4. 系统调试:对整个系统进行综合测试和调试,发现并解决潜在问题。
5. 性能评估:通过实际测试和评估,验证系统是否满足设计要求。
5. 硬件设计规格根据上述设计方法,我们制定了以下硬件设计规格:1. 处理器:选择高性能处理器,以满足系统的处理需求。
2. 存储器:配置足够的存储容量和访问速度,以支持系统的数据存储和读写需求。
3. 输入输出接口:提供多个输入输出接口,以支持系统与外部设备的连接和数据交换。
单片机系统设计方法与流程
单片机系统设计方法与流程一、简介单片机是一种集成电路,内部包含了微处理器核心、内存、输入输出口等基本电子元件,具有自主运行的能力。
单片机系统设计是指通过选取合适的单片机型号、编写程序、设计硬件电路等步骤来完成特定功能的电子系统。
本文将介绍单片机系统设计的方法与流程。
二、单片机系统设计方法1.需求分析:首先明确设计的目标和具体需求,了解所需的功能和性能要求。
2.选型:根据需求分析结果,选择适合的单片机型号。
考虑处理能力、存储容量、输入输出接口等因素。
3.软件设计:编写程序,实现系统所需的功能。
可使用C语言、汇编语言等编程语言进行开发。
4.硬件设计:设计与单片机相连的外围电路,包括输入输出端口的连接,时钟电路设计等。
5.仿真与调试:通过仿真软件进行调试,确保程序的正确性和稳定性。
6.电路板设计:根据硬件设计的结果,绘制电路板的布局图和原理图,进行电路板的设计和制作。
7.元器件选购与焊接:根据电路板设计的结果,选购合适的元器件,进行焊接和组装。
8.系统调试与优化:对整个系统进行调试,测试系统的功能和稳定性。
根据测试结果进行优化。
三、单片机系统设计流程示例以一个简单的温度测量系统为例,介绍单片机系统设计的流程。
1.需求分析:设计一个能够实时测量环境温度并显示的系统。
2.选型:选择适合的单片机型号,考虑到系统的简单性,选用ATmega328P。
3.软件设计:编写程序,利用微处理器内部的温度传感器进行测量,并将结果显示在LCD上。
4.硬件设计:设计电路板,包括单片机与温度传感器、LCD显示屏的连接电路。
5.仿真与调试:通过仿真软件进行程序调试,确保读取温度传感器数据和显示功能的正确性。
6.电路板设计:完成电路板布局图和原理图的设计,考虑电路的稳定性和可靠性。
7.元器件选购与焊接:根据电路板设计结果,选购合适的元器件,进行焊接和组装。
8.系统调试与优化:完成系统的组装后,进行整个系统的调试和测试,优化显示效果和测量精度。
电子电路与系统设计
电子电路与系统设计在当今数码科技的发展中,电子电路和系统设计起着至关重要的作用。
无论是现代通信设备、计算机硬件还是消费电子产品,都离不开电子电路与系统设计的支持和应用。
本文将探讨电子电路与系统设计的基本概念、应用领域以及设计原则。
一、电子电路与系统设计的基本概念1. 电子电路:电子电路是由电子器件、元件和互联网络组成的电路系统。
电子器件包括二极管、晶体管、集成电路等,而元件指的是电阻、电容、电感等传统元器件。
互联网络则通过导线、线缆、印制板等连接各个器件和元件,在电路中传递电流和信号。
2. 系统设计:系统设计是指将多个电子电路组合在一起,形成一个完整的、可实现特定功能的系统。
系统设计过程中需要考虑电路的可靠性、功耗、电磁兼容等因素,确保系统能够稳定工作并达到设计要求。
二、电子电路与系统设计的应用领域1. 通信设备:电子电路与系统设计在通信领域具有广泛的应用。
无线通信设备,如手机、无线路由器等,需要设计高频电路和调制解调器电路,以实现信号传输和解码。
有线通信设备,如光纤通信设备、以太网交换机等,也需要电子电路与系统设计来保证数据传输的稳定性和速度。
2. 计算机硬件:电子电路与系统设计在计算机硬件领域发挥着重要作用。
中央处理器(CPU)、内存、显卡等计算机核心组件的设计都离不开电子电路与系统设计。
通过优化电路设计,可以提高计算机硬件的运算速度和性能。
3. 消费电子产品:手机、平板电脑、电视机等消费电子产品也是电子电路与系统设计的典型应用。
通过设计合理的电路结构和优化电路布局,可以实现消费电子产品的小巧、高效和稳定。
三、电子电路与系统设计的原则1. 性能要求:在电子电路与系统设计中,首要考虑的是系统所需的性能要求,如信号处理速度、精度等。
设计时需要选择合适的器件和元件,并采用合理的电路拓扑结构来满足要求。
2. 可靠性设计:电子电路与系统必须具备良好的可靠性,能够在长时间运行条件下保持稳定。
设计时需考虑温度、电磁干扰、噪声等因素对电路性能的影响,并采取相应的措施来提高系统的可靠性。
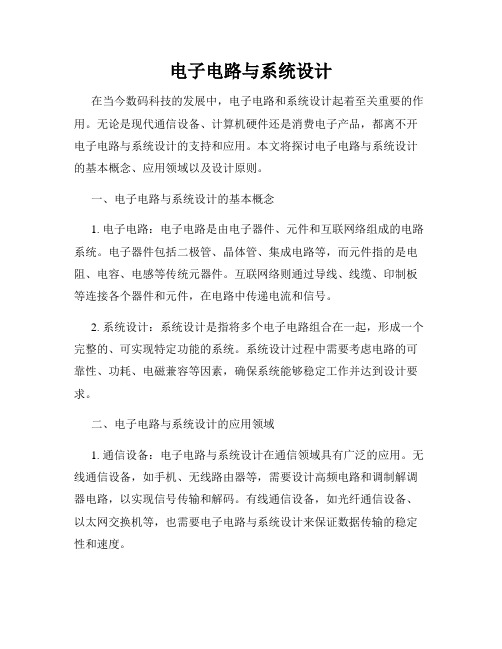
上海大众汽车kessy系统
KESSY系统元件介绍
转向柱解锁 - 用授权钥匙进入车内: 驾驶员车门打开,增加车内钥匙的数量(车内及行李箱内可能存在额外的授权钥 匙),随后关闭驾驶员车门后解锁转向柱。 - 如果授权钥匙在车内,按ZAT按钮: 如果车内至少有一把授权钥匙(驾驶员车门打开和关闭之间,车内授权钥匙数量必 须增加,例如把钥匙留在后排座椅上或行李箱中),按下ZAT按钮后解锁转向柱 (S触点接通,点火开关打开)。
KESSY系统元件介绍
ELV电子转向锁内部分解图
电机及齿轮壳体盖 锁定驱动装置
金属支座
金属盖板 印刷电路板
KESSY系统元件介绍
ELV电子转向锁安装位置
地址:16 地址:2B
ELV电子转向锁 (二只防盗螺栓
拆下)
不带ELV电子转向锁开关
盘式连接器(可 以单独拆下)
点火开关
P_锁定 选档杆
KESSY系统元件介绍
车外天线的探测范围约在各个 操作位置(车门和尾门)周围 1.50 m内,探测高度在0.1 m 到 1.8 m之间。
KESSY系统元件介绍
车门外把手针脚说明
1-天线(-) 2-接地 3-传感器信号 4-天线(+)
KESSY系统元件介绍
天线电路图(途观)
30+
ZAT按钮 灯泡
CAN-L CAN-H
KESSY系统元件介绍
S端 CANL
CANH
负极 J518
F319 50
KESSY系统元件介绍
• ELV电子转向锁和ZAT启动按钮 电路图(全新passat)
F319换档杆P档锁止开关
J682
J682(50)起动继电器 J764电子转向锁(ELV)
CANH CANL F319
有源元件应用系统的综合设计

实验报告课程名称:电网络分析 _______指导老师:_孙盾_____ 成绩:__________________ 实验名称:_有源元件应用系统综合设计实验类型:_____________同组学生姓名:__________ 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得一、实验目的和要求1. 设计有源元件实现的负阻器,在直流工作条件和交流工作状态下测试其负阻特性;2. 设计一个有源元件实现的回转器;3. 利用回转器的回转特性,制作模拟电感;运用到RLC 二阶电路的暂态响应;4. 将模拟电感运用谐振电路。
5. 将负阻器与回转器组合为系统,同时测试负阻器的负阻特性与回转器的回转特性;6. 将两个回转器组合为一个系统,实现有源变压器的传输特性;7.进一步研究混沌现象。
二、实验内容和原理(1)负阻变换器(2)回转器电路设计研究(3)变压器电路设计研究三、主要仪器设备电工电子试验台、信号发生器、示波器、DG08动态元件、DG—DZ2 四、实验数据记录和处理(1)负阻变换器1)直流电阻特性2)交流电阻特性规律:电阻两端的电压可以代表负阻电流,由此可以发现负阻两端的电压电流反相。
3)负阻变换器运用到二阶电路①不含负阻情况下:调节R11分别为0Ω、200Ω、400Ω、600Ω、800Ω、1KΩ,利用示波器通道相减原理观察电感电压波形。
R11=0ΩR11=200ΩR11=400ΩR11=600Ω根据理论计算得:2(L/C)1/2=894.4Ω。
当R>894.4Ω时,过渡过程是非周期情况,即过阻尼。
当R=894.4Ω时,过渡过程是临界阻尼。
当R<894.4Ω时,过渡过程是周期性震荡,即欠阻尼。
观察示波器图象,发现R11从0Ω到800Ω的过渡过程属于欠阻尼,1000Ω的过渡过程是过阻尼,判断临界阻尼在800——1000Ω之间,与理论推导吻合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章系統元件設計─
Angle Detector Design
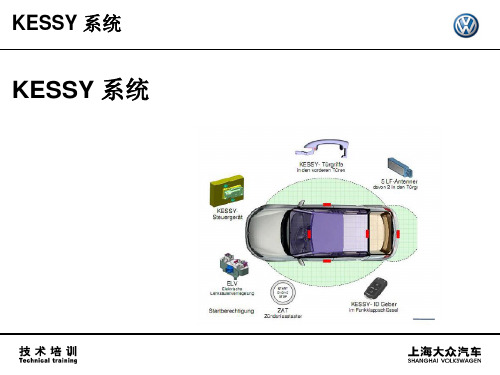
Done by張志瑋張正達3.1前言
在一個如圖3.1的倒立單擺控制系統中,為了要讀取角度回授作控制,必須將實際的角度經過感測器(Sensor)量測後,轉換成控制器可以讀取的電壓訊號,控制器才能才能加以處理。
感測器的類型有很多,在此章主要是在討論角度的讀取與轉換,故名Angle detector,常見的有:
(1) Potentiometer:利用阻值的改變來感測,雜訊多,精確度較低。
(2)Encoder+Decoder:將角度編碼、解碼後輸出,為一數位訊號,其精確度與編碼的精細度有關。
經過評比過各類的感測器之後,我們選擇利用由編碼器(Encoder)與解碼器(Decoder)組成Angle Detector,把從受控體(plant)測量得到的θ以Encoder 編碼成一組square waveform後,再利用Decoder解碼成12~16 Bits的數位訊號,送入控制器(Controller)計算誤差後送出控制訊號經由數位/類比轉換(D/A),送至直流伺服器(DC Servo)去驅使馬達(Motor)提供一作用力在倒立單擺上,以達到修正誤差的功用。
在此我們使用的Encoder及Decoder是HP的HEDS-5500及HCTL-2020。
圖3.1 倒立單擺控制系統
3.2 光電編碼器(Optical Encoder )HEDS-5500簡介
光電編碼器(Optical Encoder )如圖3.2所示,由一刻有光閘之編碼輪(code wheel )置於發光二極體和受光元件之間所組成,Code Wheel 是一個有空隙之圓板連結轉軸,隨著轉軸之旋轉,圓板跟著旋轉,當光源照射到空隙時為透光狀態,非空隙位置則不透光,因此受光元件可以依受光狀態轉換成脈波訊號。
圖3.2 光電編碼器
HEDS-5500的輸出有三個:CH.A 、CH.B 、CH.I 。
CH.A 、CH.B 是兩個相位差90°的square wave ,如圖3.3所示,在兩個square wave 之間可以分成四個state periods (S1、S 2、S3、S4),分別發生在A High -B Low 、A High -B High 、A Low -B High 、A Low -B Low 的時候。
HEDS-5500的Code Wheel 一圈共分成512個光閘刻度,因此若配合state 來計數,當轉一圈轉軸時可以獲得4
512360⨯︒的精確度。
當轉軸是順時鐘方向旋轉時,CH.A Lead CH.B ;當逆時鐘旋轉時,CH.B Lead CH.A 。
而CH.I 是一個指示訊號(index pulse ),每當轉軸轉一圈時即輸出High ,發生在最後一個state (A Low -B Low) period 內。
圖3.3 輸出波形圖
HEDS-5500的輸出端連接方式如圖3.4所示,為了要確保Encoder的輸出位準,因此在輸出端(CH.A、CH.B、CH.I)必須再連接一Pull-up Resistor至Vcc,因為CH.A、CH.B、CH.I的輸出High Level僅有2.4V,對於要輸出到的下一個元件可能無法判定是High 或是Low,因此,加上Pull-up Resistors後可以拉升輸出位準,以確保資料讀取的正確性。
圖3.4 加上Pull-up Resistors的HEDS-5500編碼器輸出埠
3.3解碼器(Decoder)HCTL-2020簡介
3.3.1HCTL-2020功能概觀
HCTL-2020外觀如圖3.5所示,內部的邏輯電路簡圖如圖3.6。
HCTL-2020可以將Encoder的輸出波形轉換成數位訊號後送給Controller處理。
Input Port CH.A、CH.B的訊號由一個Digital Noise Filter處理後送入4X Decoder進行解碼,在此判定此時是上數(Up Count)或是下數(Down Count),再送入一個16 Bit Binary Counter作計數的工作。
由於輸出ports只有8個,因此HCTL-2020必須要用SEL(Select)及OE(Output Enable)來選擇要輸出的是16 Bits中的High -8 Bits或是Low-8 Bits。
以下將HCTL-2020的幾個部分作分別的說明。
圖3.5HCTL-2020的外觀
圖3.6 簡化的內部邏輯電路圖
3.3.2數位雜訊濾波器(Digital Noise Filter)
輸入訊號CH.A、CH.B必須通過如圖3.7的數位雜訊濾波器(Digital Noise Filter)作雜訊的濾除,由圖3.7的邏輯電路可知CHA及CHB必須連續維持三個Rising-clock-edge才能通過成為CHA FILT、CHB FILT,因此一般的Low-Level Noise(小於1V)及Noise Spike(短於兩個clock週期的脈衝)都不能通過此Digital Noise Filter而會被阻擋。
實際的訊號傳遞(Signal Propagation)如圖3.8所示,短於兩個clock periods的Noise Spike不會被理會。
圖3.7 數位雜訊濾波器
圖3.8 數位雜訊濾波器的訊號傳遞
3.3.3 16 Bit Binary Counter
一如在「Optical Encoder HEDS-5500簡介」中所提到的,因為CH.A 、CH.B 的相位差90°,因此可以分成4-States 來計數,如圖3.9所示。
且當CH.A Lead CH.B 為上數(Up Count ),U/D 腳位輸出為High ;反之,當A Lag B 為下數(Down Count ),U/D 腳位輸出為Low 。
圖3.9 相位90°的解碼方式
3.3.4 時序圖
在使用一些已經設計好的特殊用途的IC 作系統設計的時候,時序圖(Timing Diagram )是非常重要的一個參考圖表,可以讓我們了解輸入與輸出之間訊號的關係。
由圖3.10可以清楚的看出,每當state 轉變(High -to -Low or Low -to -High )時,計數(Count )就加一(上數)或是減一(下數),而CNT DCDR
則
是在每計數(Count)一次即High一次,CNT CAS是在Overflow時候
(FFFFH→0000H或是0000H→FFFFH)時為High。
根據以上的工作原理,可以組合這兩個元件而成一個Angle Detector。
圖3.10時序圖
3.4電路實作
為了實際的測試是否真的可以經由Encoder與Decoder將角度轉換成為數位的訊號輸出,我們使用8051 ICE作為Clock的來源,而電路的連接如圖3.11。
由8051 ICE送出clock至CLK,Vcc接至5V,從HCTL-2020的Data Sheet得知因為HCTL-2020的輸入最低高態位準(V IH minimum)為3.5V,但是HEDS-5500之輸出高態僅為2.4V,這造成了位準判定的問題。
解決之道在其輸出腳位上都另外再接一個2.7KΩ的Pull-up電阻連接至Vcc,使得每當HEDS-5500 output 為High時皆被拉升至5V。
另外,HEDS-5500的轉軸旋轉一圈可以數到512(編碼數)⨯4(states)=211 Counts,不過此次實作只用了Low-8Bit 來計數,也就是將SEL設為High,OE設為Low,並且直接用發光二極體接在HCTL-2020的D0~
D 7以及CNT DCDR 、CNT CAS 、U/D 等Output ports ,就可以直接由發光二極體的明暗來觀察隨著轉軸旋轉所造成的明暗改變。
實作時將轉軸以一個量角器作估測依據,結果可以發現約每1/8圈,即45°左右時D 0~D 7即由00000000轉變為11111111(1亮0暗)。
因為Encoder 的code wheel 上面一圈刻有512個光閘刻度,再分成4個states ,因此,每轉一圈可以獲得1124512=⨯ counts ,而我們取出Low-8Bit 來觀測,因此當旋轉一圈之後,D 0
~D 7應該已經跑完82
2811
=次,因此與設計時的預期相符,用麵包板接出的實物如圖3.12所示。
圖3.12 實物外觀
圖3.11 電路圖。