操作系统课程设计报告-磁盘调度算法
操作系统磁盘调度算法实验报告及代码

操作系统磁盘调度算法实验报告及代码一、实验目的通过实验掌握磁盘调度算法的实现过程,了解各种不同磁盘调度算法的特点和优缺点,并比较它们的性能差异。
二、实验原理磁盘调度是操作系统中的重要内容,其主要目的是提高磁盘的利用率和系统的响应速度。
常见的磁盘调度算法有:FCFS(先来先服务)、SSTF (最短寻道时间)、SCAN(扫描)、C-SCAN(循环扫描)等。
三、实验过程1.编写代码实现磁盘调度算法首先,我们需要定义一个磁盘请求队列,其中存放所有的IO请求。
然后,根据所选的磁盘调度算法,实现对磁盘请求队列的处理和IO请求的调度。
最后,展示运行结果。
以FCFS算法为例,伪代码如下所示:```diskQueue = new DiskQueue(; // 创建磁盘请求队列while (!diskQueue.isEmpty()request = diskQueue.dequeue(; // 取出队列头的IO请求//处理IO请求displayResult(; // 展示运行结果```2.运行实验并记录数据为了验证各种磁盘调度算法的性能差异,我们可以模拟不同的场景,例如,随机生成一批磁盘IO请求,并使用不同的磁盘调度算法进行处理。
记录每种算法的平均响应时间、平均等待时间等指标。
3.撰写实验报告根据实验数据和结果,撰写实验报告。
实验报告通常包括以下内容:引言、实验目的、实验原理、实验步骤、实验结果、实验分析、结论等。
四、实验结果与分析使用不同的磁盘调度算法对磁盘IO请求进行处理,得到不同的实验结果。
通过对比这些结果,我们可以看出不同算法对磁盘IO性能的影响。
例如,FCFS算法对于请求队列中的请求没有排序,可能会导致一些请求等待时间过长。
而SSTF算法通过选择离当前磁道最近的请求进行处理,能够减少平均寻道时间,提高磁盘性能。
五、实验总结通过本次实验,我们学习了操作系统中磁盘调度算法的原理和实现过程。
不同的磁盘调度算法具有不同的优缺点,我们需要根据实际情况选择合适的算法。
操作系统课程设计-磁盘调度算法
序止之阳早格格创做纲要:本课程安排的脚段是通过安排一个磁盘调动模拟系统,进而使磁盘调动算法越收局里化,使磁盘调动的特性更简朴明白,那里主要真止磁盘调动的四种算法,分别是:1、先去先服务算法(FCFS)2、最短觅道时间劣先算法(SSTF)3、扫描算法(SCAN)4、循环扫描算法(CSCAN). 开用磁盘真止输进输出支配时,要把移动臂移动到指定的柱里,再等待指定扇区的转动到磁头位子下,而后让指定的磁头举止读写,完毕疑息传递;果此,真止一次输进输出所花的时间有:觅找时间——磁头正在移动臂戴动下移动到指定柱里所花的时间. 延缓时间——指定扇区转动到磁头下所需的时间. 传递时间——由磁头进程读写完毕疑息传递的时间,觅道时间——指估计机正在收出一个觅址下令,到相映目标数据被找到所需时间;其中传递疑息所花的时间,是正在硬件安排时牢固的,而觅找时间战延缓时间是与疑息正在磁盘上的位子有关;而后安排出磁盘调动的安排办法,包罗算法思路、步调,以及要用到的主要数据结构、函数模块及其之间的调用关系等,并给出仔细的算法安排,对付编码举止了尝试与分解. 末尾举止部分归纳与安排体验.关键词汇:最短觅道时间劣先算法、扫描算法、总觅道少度.目录前止22. 课程安排任务及央供42.1 安排任务42.2 安排央供43. 算法及数据结构53.1算法的总体思维(过程)53.2 真止历程中用到的数据结构63.3 真止历程中用到的系统调用114. 步调安排与真止114.1 最短觅道时间劣先算法(SSTF)模块114.1.2 步调证明134.1.3 步调关键代码134.2扫描算法(SCAN)模块144.2.1 步调过程图144.2.2 步调证明164.2.3 步调关键代码164.3 真验截止175. 论断266. 参照文献267. 支获、体验战提议272. 课程安排任务及央供2.1 安排任务1.认识并掌握磁盘调动算法管制系统的安排要领,加强对付所教百般调动算法及相映算法的特性相识.2.掌握磁盘调动的基础观念,深刻体验各个算法的劣缺面,以及算法间的相似面.2.2 安排央供1)定义与算法相关的数据结构,如PCB、行列等;2)真止2种分歧的调动算法(可使用真代码大概过程图举止分解);3)算法真止中断时,应给出总的觅道少度;4)磁道考察序列随机死成,且要谦脚一定的数量央供(很多于100个);5)系统真止必须提供一定的接互性,所需尝试数据应当以文献形式提供大概者由用户正在尝试历程中给出,不可将尝试数据“写死”正在系统真止代码中;6)必须给出脚够的注释,注释量不得少于代码量的一半;7)对付于系统中所使用到的系统调用(API函数),必须给出函数的定义本型、使用要领,参数较为搀纯的,还该当给出参数的简曲形貌;3. 算法及数据结构3.1算法的总体思维(过程)图a SSTF 调动算法示例图用冒泡法对付磁道数组举止排序 返回内侧(中侧)扫描 图b SSTF 算法过程示例图 本磁道号随机组成的数组:cidao[]={55,58,39,18,90,160,150,38,184}; 排序后的数组={18,38,39,5,58,90,150,160,184};输进目前磁道号:now=100;ciidao[]={55,58,39,18,90,160,150,38,184}(可随机死成多个)用户输进目前磁道号now ,比较目前磁道到每个磁道的移动距离,采用最短距离的磁道举止移动.now 指背目前磁道号,将目前磁道号与结余不考察的磁道号举止比较,沉复上述支配.并估计仄衡觅道少度ave.3839 3955 55 5558 58 58 5890 90 90 90 90now值:100 90 58 55 39184160 160150 150 15018 18 18 1838 38 38 3839 39 39 3955 55 55 5558 58 58 5890 90 90 90now值:18 150 160 184图c SSTF算法行列示企图(按磁道考察程序)2.扫描(SCAN)算法图d SCAN算法示例图本磁道号随机组成的数组:cidao[]={55,58,39,18,90,160,150,38,184};排序后的数组={18,38,39,5,58,90,150,160,184};输进目前磁道号:now=100;采用磁道移动目标;以磁道号减少的目标移动为例:5558 5890 90 90184 184 184 184160 160 160 160 160150 150 150 150 150 150now值:100 150 160 184 90 581838 3839 39 3955 55 5558 58 5890 90 90184 184 184160 160 160150 150 150now值:55 39 38图e SCAN算法行列示企图(按磁道考察程序)3.3 真止历程中用到的系统调用系统模块调用关系图4.4.14.1.2①最短②100号柱里上真的柱里为90真止支配的序次时,读写磁头总合移动多个柱里的距离,与先去先服务、算法比较,大幅度天缩小了觅找时间,具备更佳的觅道本能,果而支缩了为各考察者哀供服务的仄衡时间,也便普及了系统效用.但是最短查找时间劣先(SSTF)调动,FCFS 会引起读写头正在盘里上的大范畴移动,SSTF查找距离磁头最短(也便是查找时间最短)的哀供动做下一次服务的对付象.SSTF查找模式有下度局部化的倾背,会推早一些哀供的服务,以至引起无限缓慢(又称饥饥).算法过程:输进磁头初初磁道号,序列少度,磁道号序列.采用磁盘调动算法(最短觅道时间劣先调动(SSTF))大概(扫描调动算法(SCAN))中的任性一个,若采用SSTF,则输出各进程被调动的程序,并估计总的觅道少度战仄衡觅道少度,采用关关则中断磁盘调动.4.1.3 步调关键代码for(i=0;i<m;i++)/*使用冒泡法按从小到大程序排列*/for(j=i+1;j<m;j++){if(array[i]>array[j]){temp=array[i];array[i]=array[j];array[j]=temp;}}if(array[m-1]<=now) /*若目前磁道号大于哀供序列中最大者,则间接由中背内依次赋予各哀供服务*/ {for(i=m-1;i>=0;i--)cout<<array[i]<<" ";sum=now-array[0];}elseif(array[0]>=now) /*若目前磁道号小于哀供序列中最小者,则间接由内背中依次赋予各哀供服务*/ while((l>=0)&&(r<m)) /*目前磁道正在哀供序列范畴内*/{if((now-array[l])<=(array[r]-now)) /*采用与目前磁道迩去的哀供赋予服务*/{cout<<array[l]<<" ";sum+=now-array[l];now=array[l];l=l-1;}扫描算法(SCAN )模块4.2.1 步调过程图4.2.2 ①消了SSTF ②SCAN 法.3位搭客弛10层;弛二正在55.那里是:100号柱里的③SCAN 4.2.3 if {for {cout<<array[j]<<" "; /*输出背内扫描的序列*/}for(j=r;j<m;j++) /*磁头移动到最小号,则改变目标背中扫描已扫描的磁道*/{cout<<array[j]<<" "; /*输出背中扫描的序列*/}sum=now-2*array[0]+array[m-1];}else/*采用移动臂目标背中,则先背中扫描*/{for(j=r;j<m;j++){cout<<array[j]<<" "; /*输出背中扫描的序列*/}for(j=l;j>=0;j--) /*磁头移动到最大号,则改变目标背内扫描已扫描的磁道*/{cout<<array[j]<<" ";}sum=-now-array[0]+2*array[m-1];}ave=(float)(sum)/(float)(m);4.3真验截止运止界里截图及相映代码1.主界里void display(){cout<<"\n\n\n\n Operating Systems Curriculum Design\n";cout<<"\n ╔———————————————————————————————╗"; cout<<"\n ││";cout<<"\n │称呼: 磁盘调动│"; cout<<"\n ││";cout<<"\n │工具: Visual Studio 2010 │"; cout<<"\n ││";cout<<"\n │班级:1205 │"; cout<<"\n ││";cout<<"\n │做家:施静│"; cout<<"\n ││";cout<<"\n │教号:211214020 │"; cout<<"\n ││";cout<<"\n ╚———————————————————————————————╝\n"; system("pause");system("cls");2.序止提示用户此步调真止的算法cout<<"【载进完毕】"<<endl<<endl;cout<<" 序止"<<endl<<endl;cout<<" 欢迎使用『磁盘调动算法系统』,本步调真止了时常使用的磁盘调动算法如下所示:\n\n";cout<<" ①最短觅道时间劣先(SSTF):最短觅道时间劣先算法央供考察的磁盘与目前磁头天圆的\n";cout<<" 磁盘距离迩去,以使屡屡的觅道时间最短.\n\n";cout<<" ②扫描算法(SCAN)电梯调动:扫描算法不但是思量到欲考察的磁道与目前磁道的距离\n";cout<<" 更劣先思量的是磁头的目前移动目标.\n\n";system("pause");system("cls");//浑屏3.用户采用所使用的算法(先随机死成101个磁道号)void showMenu(int cidao[],int n){int choice;while(true){cout<<"请您采用喜欢的算法去真止调动(输进1-3):";cout<<"\n ╔—————————————╗"; cout<<"\n ││";cout<<"\n │ 1.最短觅道时间劣先(SSTF) |"; cout<<"\n ││";cout<<"\n │ 2.扫描算法(SCAN) │"; cout<<"\n ││";cout<<"\n │ 3.退出(EXIT) │"; cout<<"\n ││";cout<<"\n ╚—————————————╝\n"; cout<<endl;while(true){cout<<"目前您采用的算法号是(1-3):";cin>>choice;switch(choice){ /*case 1:FCFS(a,n);break;*/case 1:SSTF(cidao,n);break;case 2:SCAN(cidao,n);break;case 3:cout<<"\n要退出系统了欢迎使用本系统\n";exit(0);}}}}4.最短觅道时间劣先算法/**********************最短觅道时间劣先调动算法********************/ void SSTF(int cidao[],int m){system("cls");int k=1;int now,l,r;int i,j,sum=0;int a;char str[100];float ave;cidao=bubble(cidao,m); //调用冒泡排序算法排序cout<<"请输进目前的磁道号:";C: cin>>str; //对付输进数据举止灵验性推断a=decide(str);if(a==0){cout<<"输进数据的典型过得,请沉新输进!"<<endl;goto C;}elsenow=trans(str,a); //输进目前磁道号if(cidao[m-1]<=now) //若目前磁道号大于哀供序列中最大者,则间接由中背内依次赋予各哀供服务{cout<<"磁盘扫描序列为:";for(i=m-1;i>=0;i--)cout<<cidao[i]<<" ";sum=now-cidao[0];}if(cidao[0]>=now) //若目前磁道号小于哀供序列中最小者,则间接由内背中依次赋予各哀供服务{cout<<"磁盘扫描序列为:";for(i=0;i<m;i++)cout<<cidao[i]<<" ";sum=cidao[m-1]-now;}if(now>cidao[0]&&now<cidao[m-1]) //若目前磁道号大于哀供序列中最小者且小于最大者{cout<<"磁盘扫描序列为:";while(cidao[k]<now) //决定目前磁道正在已排的序列中的位子,后里的算法皆用到了,不妨间接复制后少量建改,节省时间.{k++;}l=k-1;r=k;while((l>=0)&&(r<m)) //目前磁道正在哀供序列范畴内{if((now-cidao[l])<=(cidao[r]-now)) //采用与目前磁道迩去的哀供赋予服务{cout<<cidao[l]<<" ";sum+=now-cidao[l];now=cidao[l];l=l-1;}else{cout<<cidao[r]<<" ";sum+=cidao[r]-now;now=cidao[r];r=r+1;}}if(l==-1) //磁头移动到序列的最小号,返回中侧扫描仍已扫描的磁道{for(j=r;j<m;j++){cout<<cidao[j]<<" ";}sum+=cidao[m-1]-cidao[0];}else//磁头移动到序列的最大号,返回内侧扫描仍已扫描的磁道{for(j=l;j>=0;j--){cout<<cidao[j]<<" ";}sum+=cidao[m-1]-cidao[0];}}ave=(float)(sum)/(float)(m);//供仄衡觅道少度cout<<endl;cout<<"总的觅道少度: "<<sum<<endl;cout<<"仄衡觅道少度: "<<ave<<endl;cout<<"请按任性键返回系统菜单"<<endl;getch();showMenu(cidao,m); //回到主界里}最短觅道时间劣先(SSTF)算法真止界里(2)扫描(SCAN)算法/*****************************扫描调动算法*******************************/ void SCAN(int cidao[],int n)//先要给出目前磁道号战移动臂的移动目标{int temp;int i,j;int now;int sum;for(i=0;i<n;i++) //给磁道号排序for(j=i+1;j<n;j++){if(cidao[i]>cidao[j]){temp=cidao[i];cidao[i]=cidao[j];cidao[j]=temp;}}cout<<"\n按非递减程序排列佳的磁道: \n";for(i=0;i<n;i++) //输出排佳序的磁道号cout<<cidao[i]<<" ";cout<<endl;cout<<"\n请输进目前的磁道号: ";cin>>now; //用户自定义目前磁道号if(cidao[n-1]<=now){for(i=n-1;i>=0;i--)cout<<cidao[i]<<" ";sum=now-cidao[0];}else//cidao[n-1]>nowif(cidao[0]>=now){for(i=0;i<n;i++)cout<<cidao[i]<<" ";sum=cidao[n-1]-now;}else//cidao[0]<now && cidao[n-1]>now{int pointer;int location=1;int left,right;while(cidao[location]<now)location++;left=location-1;right=location;cout<<"\n请输进目前磁头念要移动的目标(1 磁道号减少目标,0 磁道号减小目标): "; loop:cin>>pointer;cout<<"\n磁盘调动程序为: \n";if(pointer==0 || pointer==1){if(pointer==0)//磁头背左移动到最小号,再改变目标背中扫描已扫描的磁道{for(j=left;j>=0;j--)cout<<cidao[j]<<" ";for(j=right;j<n;j++)cout<<cidao[j]<<" ";sum=now+cidao[n-1]-2*cidao[0];cout<<endl;}if(pointer==1)//磁头背左移动到最大号,再改变目标背内扫描已扫描的磁道{for(j=right;j<n;j++)cout<<cidao[j]<<" ";for(j=left;j>=0;j--)cout<<cidao[j]<<" ";sum=2*cidao[n-1]-now-cidao[0];//供总觅道少度cout<<endl;}}else{cout<<"\n输进分歧法!!请输进0大概1:\n"; goto loop;}}cout<<"\n\n需要移动的总磁道数为: "<<sum<<endl; cout<<"请按任性键返回系统菜单"<<endl;getch();showMenu(cidao,n); //回到主界里5.论断(1)用户界里友佳,采与了采用菜单模式,用户只需按“回车键”即可再现主界里;结构浑晰,支配简朴易懂,界里浑爽整净;(2)统制变量对付比,各磁盘调动算法均对付共一组随机磁道号举止调动,但是本去不会改变随机磁道真质,包管了仄衡觅道少度对付比的真正在性、灵验性. (3)百般算法皆有便宜,也各有缺累,需要权衡利弊,使用才搞达到最佳的效验.6.参照文献《估计机支配系统(建订版)》汤子瀛西安电子科技大教出版社《支配系统教程》圆敏编西安电子科技大教出版社《数据结构(C++版)》王白梅、胡明、王涛编著浑华大教出版社7.支获、体验战提议正在搞本次课程安排之前,对付于磁盘调动,尔真足不观念.通过齐力以及分离教授之前道的真质,尔毕竟深刻明白了磁盘调动算法的内涵.正在钻研自己所选的二种算法的共时,对付磁盘调动的四种算法——先去先服务算法(FCFS)、最短觅道时间劣先算法(SSTF)、扫描算法(SCAN)、循环扫描算法(CSCAN)皆有了更深刻的明白战掌握,使尔不妨为磁盘调动采用适合的算法,普及CPU处事效用.安排历程中逢到的艰易正在教授战共教的助闲下乐成办理并通过了查支,尔深刻认识到算法的逻辑性对付步调的要害做用,算法的准确度对付步调运止截止的要害做用,那对付尔以去正在支配系统的教习中有极大助闲.每一次的课程安排皆是对付自己之前所教知识的加强,是一次罕见的教习机会.正在课程安排的每一个步调、每一段代码的真止,皆要反复去斟酌,反复运止调试,一面面的小偏偏好皆市引导波折.果为乐成阻挡易,所以当调试板上隐现“死成乐成”时,谦背的成便感是不问可知的.通过自己的动脚动脑,不但是减少了知识,还给了尔博业知识以及博业技能上的提下,对付普及自己的思维本领战支配本领也有很大的助闲.共时尔也会越收有自疑心,越收齐力,严肃教习,争与正在以去的课程中搞得更佳!。
磁盘调度的实验报告(3篇)

第1篇一、实验目的1. 理解磁盘调度算法的基本原理和重要性。
2. 掌握几种常见的磁盘调度算法,包括先来先服务(FCFS)、最短寻道时间优先(SSTF)、扫描(SCAN)和循环扫描(C-SCAN)算法。
3. 通过模拟实验,分析不同磁盘调度算法的性能差异。
4. 优化磁盘调度策略,提高磁盘访问效率。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3.83. 磁盘调度算法模拟库:PyDiskScheduling三、实验内容1. FCFS算法:模拟实现先来先服务算法,按照请求顺序访问磁盘。
2. SSTF算法:模拟实现最短寻道时间优先算法,优先访问距离当前磁头最近的请求。
3. SCAN算法:模拟实现扫描算法,磁头从0号磁道开始向0号磁道移动,访问所有请求,然后返回到0号磁道。
4. C-SCAN算法:模拟实现循环扫描算法,与SCAN算法类似,但磁头在到达末尾磁道后返回到0号磁道。
四、实验步骤1. 导入PyDiskScheduling库。
2. 创建一个磁盘调度对象,指定磁头初始位置、请求序列和调度算法。
3. 运行调度算法,获取磁头移动轨迹和访问时间。
4. 分析算法性能,包括磁头移动次数、平均访问时间和响应时间等。
五、实验结果与分析1. FCFS算法:在请求序列较短时,FCFS算法表现较好。
但随着请求序列长度增加,磁头移动次数和访问时间明显增加。
2. SSTF算法:SSTF算法在请求序列较短时表现最佳,平均访问时间和响应时间较低。
但当请求序列较长时,算法性能下降,磁头移动次数增加。
3. SCAN算法:SCAN算法在请求序列较短时性能较好,但随着请求序列长度增加,磁头移动次数和访问时间逐渐增加。
与SSTF算法相比,SCAN算法在请求序列较长时性能更稳定。
4. C-SCAN算法:C-SCAN算法在请求序列较短时表现较好,但随着请求序列长度增加,磁头移动次数和访问时间逐渐增加。
与SCAN算法相比,C-SCAN算法在请求序列较长时性能更稳定,且磁头移动次数更少。
操作系统课程设计报告磁盘调度算法
操作系统课程设计报告磁盘调度算法华南农业⼤学数学与信息学院(软件学院)《操作系统分析与设计实习》成绩单开设时间:2015学年第⼀学期⼀、需求分析(1)输⼊的形式和输⼊值的范围:在⽂本框输⼊序列长度,输⼊值为int类型输出每种算法的平均寻道长度。
(3)程序所能达到的功能:模拟实现FCFS、SSTF、SCAN、C-SCAN 算法,并计算及⽐较磁头移动道数。
(4)测试数据:包括正确的输⼊及其输出结果和含有错误的输⼊及其输出结果:⼆、概要设计1)主程序流程图:输出随机⽣成400个磁道号序列主菜单选择算法开始FCFS SSTFSCANC-SCAN 结束(2)各程序模块之间的调⽤关系磁头初始位置输⼊及合法性检查冒泡排序算法由外向内输出磁道序列由内向外输出磁道序列由当前位置向内再向外输出磁道序列由当前位置向外再向内输出磁道序列由当前位置向内再由外向内输出磁道序列由当前位置向外再由内向外输出磁道序列就近选择主函数SCANC-SCAN三、详细设计1)各操作伪码算法(1)实现磁头初始位置的输⼊并进⾏合法性检查int printstarter()//磁头初始位置输⼊{输⼊:磁头初始位置;if输⼊⼩于0或⼤于1500{输出:"输⼊数据类型有误,请重新输⼊!"<重新输⼊}Else 返回合法的磁头初始位置}(2)冒泡排序算法int *bubble//冒泡排序算法{for 从数组的第⼀个元素开始重复{依次和后续元素表较⼤⼩;If后⾯元素⼤于当前元素交换数值;}输出排序后的数组;返回数组;}(3)int out_to_in//由磁道最外向内输出磁道序列{for 从最外磁道开始{依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;返回绝对值之和;}(4)int in_to_out//由磁道最内向外输出磁道序列{ for 从最内磁道开始{依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;磁头初始位置=当前磁道号;}返回绝对值之和;}(5)int out_to_in_to_out//先由当前位置向内再向外{找到⼩于等于磁头初始位置的磁道for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;}for由该磁道的外侧磁道开始{向外依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;}返回绝对值之和;}(6)int in_to_out_to_in//先由当前位置向外再向内{找到⼤于等于磁头初始位置的磁道for由该磁道开始{向外依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;}for由该磁道的内侧磁道开始当前磁道号与磁头初始未⾄的绝对值求和;}返回绝对值之和;}(7)int out_to_in_twice由当前磁道向内再从最外向内{找到⼩于等于磁头初始位置的磁道;for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;}for由最外侧磁道开始{向内依次输出磁道号直到⼩于等于初始位置的磁道的外侧⼀个磁道;当前磁道号与磁头初始未⾄的绝对值求和;}返回绝对值之和;}(8)int in_to_out_twice由当前磁道向外再从最内向外{找到⼤于等于磁头初始位置的磁道for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未⾄的绝对值求和;}for由最内侧磁道开始{向外依次输出磁道号直到⼩于等于初始位置的磁道的内侧⼀个磁道;当前磁道号与磁头初始未⾄的绝对值求和;}返回绝对值之和;{找到⼤于磁头初始位置的磁道;while初始位置内侧差绝对值更⼩{输出内侧磁道号;绝对值差求和;初始位置更新为当前磁道号;}while 初始位置外侧绝对值差更⼩{输出外侧磁道号;绝对值差求和;初始位置更新为当前磁道号;}}If已到达最内侧未到达最外侧{if内侧绝对值差更⼩{输出最内侧磁道号;绝对差值求和;初始位置更新;while 向外侧依次输出磁道号直到到达最外侧{绝对差值求和;更新初始位置;}}else外侧绝对值差更⼩{While向外侧依次输出磁道号直到到达最外侧{绝对差值求和;更新初始位置;绝对差值求和;更新初始位置;}}if 已到达最外侧未到达最内侧{If外侧绝对值更⼩{输出最外侧磁道号;绝对差值求和;更新初始位置;while向内依次输出磁道号{绝对差值求和;更新初始位置;}}else{while 向内依次输出磁道号{绝对差值求和;更新初始位置;}输出最外侧磁道号;绝对值差求和;更新初始位置;}}if均到达最内侧和最外侧{if 外侧差绝对值更⼩{}else{输出最内侧磁道号并绝对值差求和;输出最外侧磁道号并绝对值差求和;}}求总和并返回;}(10)void FCFS算法{输出磁盘请求序列为;按照磁盘请求序列依次输出磁盘扫描序列;当前磁道号与磁头初始未⾄的绝对值求和;求平均值;输出平均寻道长度;}(11)void SSTF算法{if序列中最⼤的磁道号⼩于磁头初始位置{调⽤out_to_in直接由外向内;}if 序列中最⼩的磁道号⼤于磁头初始位置{调⽤in_to_out直接由内向外;}If 磁头初始位置为中间值{调⽤就近选择算法;}求均值;输出平均寻道时间;}输⼊:磁臂移动⽅向(1:向外,0:向内); if 序列中最⼤的磁道号⼩于磁头初始位置{调⽤out_to_in直接由外向内;}if序列中最⼩的磁道号⼤于磁头初始位置{调⽤in_to_out直接由内向外;}if 初始磁头位置为中间值{if 磁臂⽅向向内{调⽤out_to_in_to_out;}if 磁臂⽅向向外{调⽤n_to_out_to_in;}}求均值;输出平均寻道时间;}(13)Viod C-SCAN算法{请输⼊磁臂移动⽅向(1:向外,0:向内);if 序列中最⼤磁道号⼩于等于磁头初始位置{ if磁臂⽅向向内{调⽤out_to_in;}if磁臂⽅向向外{调⽤in_to_out;if 序列中最⼤磁道号⼤于等于磁头初始位置{if磁臂⽅向向内{调⽤out_to_in;}if磁臂⽅向向外{调⽤in_to_out;}}if初始磁头位置为中间值{if (磁臂⽅向向内{调⽤out_to_in_twice;}if 磁臂⽅向向外{调⽤in_to_out_twice);}}求均值;输出平均寻道时间;}(14)主函数int main(){随机⽣成200个0~499的磁道序列并输出;随机⽣成100个500~999的磁道序列并输出;随机⽣成100个1000~1500的磁道序列并输出;输出:主菜单;输⼊:⽤户选择并进⾏合法性检查switch (⽤户选择)case 2:调⽤SSTF()case 3:调⽤SCAN()case 4:调⽤C-SCAN()case 5:退出}}2)函数的调⽤关系图四、调试分析1)调试过程中遇到的问题以及对设计与实现的讨论和分析:(1)随机⽣成400个磁道号序列:使⽤rand()函数,对于:50%位于 0~499,25%分布在 500~999,25%分布在 1000~1499,采⽤如下⽅法解决:track[i] = (rand() % 500);track[i] = (rand() % 500)+500;track[i] = (rand() % 500)+1000;(2)通过对每⼀⾏的输出设置断点判断问题出现在哪⾥,把出问题的地⽅缩⼩到⼀定范围,然后解决问题,如若解决不出则上⽹查询。
操作系统磁盘调度算法实验报告
目录目录 (1)1.课程设计目的 (1)1.1编写目的 (1)2.课程设计内容 (1)2.1设计内容 (1)3.1模块调用关系图..................................................... 错误!未定义书签。
4.测试数据和结果 (4)5.参考文献 (7)6.总结 (7)1.课程设计目的1.1编写目的本课程设计的目的是通过磁盘调度算法设计一个磁盘调度模拟系统,从而使磁盘调度算法更加形象化,容易使人理解,使磁盘调度的特点更简单明了,能使使用者加深对先来先服务算法、最短寻道时间优先算法、扫描算法以及循环扫描算法等磁盘调度算法的理解。
2.课程设计内容2.1设计内容系统主界面可以灵活选择某种算法,算法包括:先来先服务算法(FCFS)、最短寻道时间优先算法(SSTF)、扫描算法(SCAN)、循环扫描算法(CSCAN)。
1、先来先服务算法(FCFS)这是一种比较简单的磁盘调度算法。
它根据进程请求访问磁盘的先后次序进行调度。
此算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。
此算法由于未对寻道进行优化,在对磁盘的访问请求比较多的情况下,此算法将降低设备服务的吞吐量,致使平均寻道时间可能较长,但各进程得到服务的响应时间的变化幅度较小。
2、最短寻道时间优先算法(SSTF)该算法选择这样的进程,其要求访问的磁道与当前磁头所在的磁道距离最近,以使每次的寻道时间最短,该算法可以得到比较好的吞吐量,但却不能保证平均寻道时间最短。
其缺点是对用户的服务请求的响应机会不是均等的,因而导致响应时间的变化幅度很大。
在服务请求很多的情况下,对内外边缘磁道的请求将会无限期的被延迟,有些请求的响应时间将不可预期。
3、扫描算法(SCAN)扫描算法不仅考虑到欲访问的磁道与当前磁道的距离,更优先考虑的是磁头的当前移动方向。
例如,当磁头正在自里向外移动时,扫描算法所选择的下一个访问对象应是其欲访问的磁道既在当前磁道之外,又是距离最近的。
操作系统-磁盘调度算法
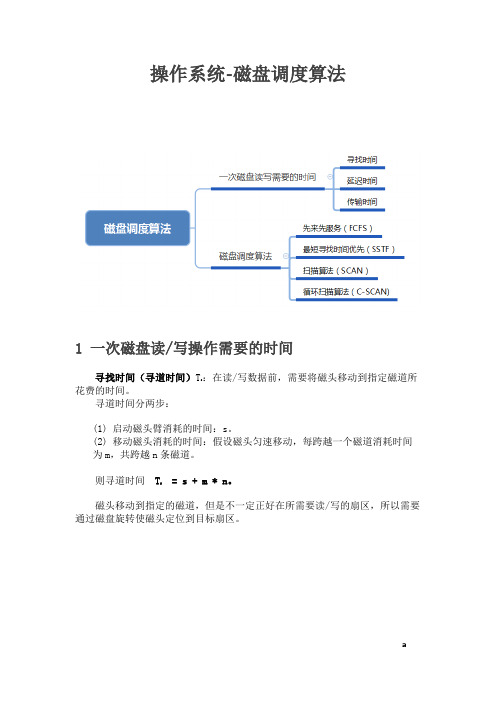
操作系统-磁盘调度算法1 一次磁盘读/写操作需要的时间寻找时间(寻道时间)T s:在读/写数据前,需要将磁头移动到指定磁道所花费的时间。
寻道时间分两步:(1) 启动磁头臂消耗的时间:s。
(2) 移动磁头消耗的时间:假设磁头匀速移动,每跨越一个磁道消耗时间为m,共跨越n条磁道。
则寻道时间T s= s + m * n。
磁头移动到指定的磁道,但是不一定正好在所需要读/写的扇区,所以需要通过磁盘旋转使磁头定位到目标扇区。
延迟时间T R:通过旋转磁盘,使磁头定位到目标扇区所需要的时间。
设磁盘转速为r(单位:转/秒,或转/分),则平均所需延迟时间T R=(1/2)*(1/r) = 1/2r。
1/r就是转一圈所需的时间。
找到目标扇区平均需要转半圈,因此再乘以1/2。
传输时间T R:从磁盘读出或向磁盘中写入数据所经历的时间,假设磁盘转速为r,此次读/写的字节数为b,每个磁道上的字节数为N,则传输时间T R= (b/N) * (1/r) = b/(rN)。
每个磁道可存N字节数据,因此b字节数据需要b/N个磁道才能存储。
而读/写一个磁道所需的时间刚好是转一圈的时间1/r。
总的平均时间T a= T s+ 1/2r + b/(rN),由于延迟时间和传输时间都是与磁盘转速有关的,且是线性相关。
而转速又是磁盘的固有属性,因此无法通过操作系统优化延迟时间和传输时间。
所以只能优化寻找时间。
2 磁盘调度算法2.1 先来先服务算法(FCFS)算法思想:根据进程请求访问磁盘的先后顺序进行调度。
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问55、58、39、18、90、160、150、38、184号磁道。
按照先来先服务算法规则,按照请求到达的顺序,磁头需要一次移动到55、58、39、18、90、160、150、38、184号磁道。
磁头共移动了 45 + 3 + 19 + 21 + 72 + 70 + 10 + 112 + 146 = 498个磁道。
操作系统-磁盘调度算法实验报告

操作系统实验报告实验六磁盘调度算法班级:学号:姓名:一、需求分析1、实验目的:通过这次实验,加深对磁盘调度算法的理解,进一步掌握先来先服务FCFS、最短寻道时间优先SSTF、SCAN和循环SCAN算法的实现方法。
2、问题描述:设计程序模拟先来先服务FCFS、最短寻道时间优先SSTF、SCAN和循环SCAN算法的工作过程。
假设有n个磁道号所组成的磁道访问序列,给定开始磁道号m和磁头移动的方向(正向或者反向),分别利用不同的磁盘调度算法访问磁道序列,给出每一次访问的磁头移动距离,计算每种算法的平均寻道长度。
3、程序要求:1)利用先来先服务FCFS、最短寻道时间优先SSTF、SCAN 和循环SCAN算法模拟磁道访问过程。
2)模拟四种算法的磁道访问过程,给出每个磁道访问的磁头移动距离。
3)输入:磁道个数n和磁道访问序列,开始磁道号m和磁头移动方向(对SCAN和循环SCAN算法有效),算法选择1-FCFS,2-SSTF,3-SCAN,4-循环SCAN。
4)输出:每种算法的平均寻道长度。
二、概要设计1、程序中的变量及数据结构的定义a) 自定义的整型向量类型:typedef vector<int> vInt;b) 磁道的结构体:struct OrderItem{int Data; //磁道号bool IsVisited;//磁道是否已被访问};c) 磁道序列类型:typedef vector<OrderItem> Order;d) 存储待访问磁道序列:Order InitOrder;e) 存储已被访问的磁道序列:vInt TrackOrder;f) 移动距离序列:vInt MoveDistance;g) 平均寻道长度:double AverageDistance;2、主要函数说明a)获取用户输入的磁盘个数和磁盘的访问序列:void InitDate(int &num);参数num为磁道个数b)先来先服务算法:void FCFS(int disk);c)最短寻道时间优先算法:void SSTF(int disk);d)扫描算法:void SCAN(int disk);e)循环扫描算法:void CSCAN(int disk);f)void Show(int disk);3、主函数的流程三、详细设计1.FCFS算法a)说明:根据进程请求访问磁盘的先后次序进行调度。
操作系统课程设计报告磁盘调度算法
课程设计课程设计名称:操作系统应用课程设计专业班级:学生姓名:xxxxx学号:指导教师:课程设计时间: 2010.12.20-2010.12.26计算机科学专业课程设计任务书说明:本表由指导教师填写,由教研室主任审核后下达给选题学生,装订在设计(论文)首页一 .课程设计需求分析操作系统是计算机系统的一个重要系统软件。
我们在本课程的实验过程中,了解实际操作系统的工作过程,在实践中加深对操作系统原理的理解。
磁盘存储器不仅容量大,存取速度快,而且可以实现随机存取,是当前存放大量程序和数据的理想设备,故在现代计算机系统中,都配置了磁盘存储器,并以它为主来存放文件。
这样,对文件的操作,都将涉及到对磁盘的访问。
磁盘I/O速度的高低和磁盘系统的可靠性都将直接影响到系统性能。
因此,设法改善磁盘系统的性能,已成为现代操作系统的重要任务之一。
磁盘性能有数据的组织、磁盘的类型和访问时间等。
磁盘调度的目标是使磁盘的平均寻道时间最少。
也正因为这样,我们有必要对各算法进行模拟,进而比较、分析、了解。
本实验设计的目的是通过设计一个磁盘调度模拟系统,以加深对最短寻道时间优先(SSTF)、N步扫描算法(NStepSCAN)等磁盘调度算法的理解。
让我们更好地掌握操作系统的原理及实现方法,加深对操作系统基础理论和重要算法的理解,加强动手能力。
二.课程设计原理设备的动态分配算法与进程调度相似,也是基于一定的分配策略的。
常用的分配策略有先请求先分配、优先级高者先分配等策略。
在多道程序系统中,低效率通常是由于磁盘类旋转设备使用不当造成的。
操作系统中,对磁盘的访问要求来自多方面,常常需要排队。
这时,对众多的访问要求按一定的次序响应,会直接影响磁盘的工作效率,进而影响系统的性能。
访问磁盘的时间因子由3部分构成,它们是查找(查找磁道)时间、等待(旋转等待扇区)时间和数据传输时间,其中查找时间是决定因素。
因此,磁盘调度算法先考虑优化查找策略,需要时再优化旋转等待策略。
操作系统课设报告磁盘调度算法

课程设计报告课程名称: 操作系统课程设计课题名称: 磁盘调度算法学院: 软件学院班级:学生姓名:学号:指导教师:磁盘调度算法一、系统需求分析磁盘存储器不仅容量大,存取速度快,而且可以实现随机存取,是当前存放大量程序和数据的理想设备。
所以在现代计算机中都配备了磁盘存储器,以他为主存放文件,这样对文件的读、写操作都涉及到了对磁盘存储器的访问。
磁盘I/O速度的高低和磁盘系统的可靠性,都直接影响到系统的性能。
因此改善磁盘系统的性能成为现代操作系统的重要任务之一。
磁盘性能有数据的组织、磁盘的类型和访问时间等。
可以通过选择好的磁盘调度算法,以减少磁盘的寻道时间。
为了减少对文件的访问时间,应采用一种最佳的磁盘调度算法,以使各进程对磁盘的平均访问时间最少。
由于在访问磁盘的时间中主要是寻道时间,因此,磁盘调度的目标是使磁盘的寻道时间最少。
所以本课程设计对各个算法进行模拟,进而比较分析了解。
二、实验内容和目的2.1.实验内容模拟电梯调度算法,实现对磁盘的驱动调度。
设计要求:编程序实现下述磁盘调度算法,并求出每种算法的平均寻道长度;要求设计主界面可以灵活选择某算法,且以下算法都要实现1、先来先服务算法(FCFS)2、最短寻道时间优先算法(SSTF)3、扫描算法(SCAN)4、循环扫描算法(CSCAN)2.2.实验原理模拟电梯调度算法,对磁盘调度。
磁盘是要供多个进程共享的存储设备,但一个磁盘每个时刻只能为一个进程服务。
当有进程在访问某个磁盘时,其他想访问该磁盘的进程必须等待,直到磁盘一次工作结束。
当有多个进程提出输入输出请求处于等待状态,可用电梯调度算法从若干个等待访问者中选择一个进程,让它访问磁盘。
当存取臂仅需移到一个方向最远的所请求的柱面后,如果没有访问请求了,存取臂就改变方向。
三、总体设计及分类简介3.1算法介绍磁盘调度中常用的有四种算法,功能分别如下:1.先来先服务(FCFS)算法。
即先来的请求先被响应。
FCFS策略看起来似乎是相当"公平"的,但是当请求的频率过高的时候FCFS策略的响应时间就会大大延长。
磁盘调度算法的设计实验报告

磁盘调度算法的设计实验报告一、实验背景磁盘调度算法是操作系统中的重要内容之一,它的主要作用是优化磁盘的读写效率,提高系统的性能。
本次实验旨在通过设计不同的磁盘调度算法,比较它们在不同情况下的性能表现。
二、实验环境本次实验使用了Linux操作系统和C语言编程语言。
硬件环境为Intel Core i5处理器、4GB内存和500GB硬盘。
三、实验过程1. 先来看看什么是磁盘调度算法。
磁盘调度算法是指操作系统中用于管理磁盘I/O请求队列的算法。
常见的磁盘调度算法有FCFS(先来先服务)、SSTF(最短寻道时间优先)、SCAN(扫描)、LOOK(往返扫描)等。
2. 接下来我们分别对这些算法进行设计和实现,并进行性能测试。
3. 首先是FCFS算法。
FCFS算法就是按照请求到达时间的顺序进行服务,即先来先服务。
我们通过模拟生成一组随机数作为请求队列,然后计算出每个请求需要移动的距离,并计算出平均寻道长度。
4. 然后是SSTF算法。
SSTF算法是指选择距离当前磁头位置最近的请求进行服务。
我们同样使用模拟生成一组随机数作为请求队列,然后计算出每个请求与当前磁头位置的距离,并按照距离从小到大进行排序,然后依次服务每个请求,并计算出平均寻道长度。
5. 接下来是SCAN算法。
SCAN算法是指磁头从一端开始移动,直到到达另一端,然后返回原点继续移动。
我们同样使用模拟生成一组随机数作为请求队列,并将其按照磁头当前位置的左右分成两部分,分别从左往右和从右往左进行服务,并计算出平均寻道长度。
6. 最后是LOOK算法。
LOOK算法和SCAN类似,不同之处在于当服务完最远的请求时不会返回原点,而是直接返回最近的请求。
我们同样使用模拟生成一组随机数作为请求队列,并将其按照磁头当前位置的左右分成两部分,分别从左往右和从右往左进行服务,并计算出平均寻道长度。
四、实验结果通过对以上四种磁盘调度算法进行测试,得到以下结果:1. FCFS平均寻道长度:1622. SSTF平均寻道长度:783. SCAN平均寻道长度:984. LOOK平均寻道长度:87五、实验结论从实验结果可以看出,SSTF算法的性能最优,平均寻道长度最短。
磁盘调度算法课程设计

磁盘调度算法课程设计
磁盘调度算法课程设计
1.t实验任务
(1)掌握磁盘调度算法的基本概念;
(2)熟悉FCFS,SSTF,SCAN,CSCAN磁盘调度算法;
(3)根据不同的调度算法,实现磁盘调度的模拟;
(4)通过实验,观察不同的磁盘调度算法在磁盘请求序列的处理上的性能比较。
2.t实验内容
(1)使用C/C++,Java,C#等语言,根据不同的调度算法,实现磁盘调度模拟的程序;
(2)根据输入的磁盘请求序列,利用FCFS,SSTF,SCAN,CSCAN 磁盘调度算法,模拟处理这些请求序列;
(3)输出生成后的磁盘请求序列,以及各个磁盘调度算法调度完后的总寻道时间;
(4)通过比较不同磁盘调度算法的总寻道时间,对比分析不同磁盘调度算法的性能优劣;
(5)编写分析报告,完成实验内容。
3.t实验要求
(1)根据实验要求,实现磁盘调度模拟的程序,满足要求;
(2)编写分析报告,按照标准格式完成实验报告;
(3)熟练掌握磁盘调度算法的基本概念,理解各个磁盘调度算
法的特点和用途;
(4)根据不同磁盘请求序列的性质,分析不同磁盘调度算法的优劣;
(5)理解不同磁盘调度算法在处理磁盘请求的性能比较,形成自己的体会与总结。
4.t实验评价
(1)实现磁盘调度模拟的程序,满足实验要求;
(2)熟练掌握磁盘调度算法的基本概念;
(3)准确地模拟不同的调度算法,输出磁盘请求序列,求出每种调度算法的总寻道时间;
(4)根据结果及实验体会,清晰准确地分析不同的磁盘调度算法的优劣;
(5)论述清楚,思路清晰,实验报告符合格式要求,文字结构完整。
磁盘调度算法课程设计

磁盘调度算法课程设计一、课程目标知识目标:1. 理解磁盘调度算法的基本原理和重要性;2. 掌握常用的磁盘调度算法,如FCFS、SSTF、SCAN和C-SCAN;3. 学会分析不同调度算法的性能特点及其适用场景;4. 能够运用磁盘调度算法优化磁盘访问效率。
技能目标:1. 培养学生运用所学知识解决实际问题的能力;2. 提高学生的编程实践能力,使其能够编写简单的磁盘调度算法程序;3. 培养学生通过对比分析,选择合适算法解决问题的能力。
情感态度价值观目标:1. 培养学生对计算机操作系统中磁盘调度算法的兴趣,激发学习热情;2. 培养学生团队协作精神,学会在合作中共同解决问题;3. 培养学生严谨的科学态度,认识到磁盘调度算法在计算机系统中的重要性。
本课程针对高中年级学生,课程性质为理论与实践相结合。
在教学过程中,充分考虑学生的认知特点,从实际应用出发,引导学生掌握磁盘调度算法的基本概念和原理。
通过案例分析和编程实践,使学生能够将所学知识应用于解决实际问题。
在教学过程中,注重培养学生的动手能力和团队协作精神,提高学生的综合素质。
课程目标的设定旨在使学生在掌握磁盘调度算法相关知识的基础上,培养其运用所学知识解决问题的能力,同时注重培养学生正确的情感态度价值观。
后续教学设计和评估将围绕具体学习成果展开,确保课程目标的实现。
二、教学内容本章节教学内容主要包括以下几部分:1. 磁盘调度算法概述- 了解磁盘存储器的基本结构和工作原理;- 理解磁盘调度算法的定义及其在操作系统中的作用。
2. 常用磁盘调度算法- FCFS(先来先服务)算法;- SSTF(最短寻道时间优先)算法;- SCAN(扫描)算法;- C-SCAN(循环扫描)算法。
3. 磁盘调度算法性能分析- 对比分析各种磁盘调度算法的性能指标,如寻道时间、平均等待时间等;- 探讨不同算法适用的场景和优缺点。
4. 磁盘调度算法编程实践- 学习使用编程语言实现磁盘调度算法;- 通过案例分析和编程实践,加深对磁盘调度算法的理解。
磁盘调度算法程序课程设计报告
课程设计报告题目磁盘调度算法程序设计课程名称院部名称操作系统课程设计信息技术学院专业计算机科学与技术班级M11计算机科学与技术Ⅱ学生姓名学号课程设计地点A205课程设计学时20指导教师李莉金陵科技学院教务处制成绩目录一、课程设计的目的和要求 (2)1、目的 (2)2、要求 (2)二、设计任务介绍及系统需求分析2.1 任务介绍 (2)2.2基本需求设计 (2)三、概要设计 (3)3.1 程序主要流程 (3)3.2 程序的函数调用关系 (5)四、详细设计 (5)4.1数据结构描述 (5)4.2 各功能模块(或主要过程)分析 (5)4.3各子程序流程分析 (7)4.3.1 FCFS() (7)4.3.2 SSTF() (8)4.3.3 SCAN() (9)五、调试与测试 (10)5.1 程序运行初始界面 (10)5.2 键盘输入磁道 (10)5.3 随机产生磁道 (10)5.4 先来先服务算法 (10)5.5 最短寻道时间优先算法 (10)5.6 扫描算法 (12)5.6.1 先向外扫描 (11)5.6.2 先向里扫描 (11)5.7 退出程序 (11)六、结论与体会 (12)参考文献 (12)附件:源程序清单 (13)一、课程设计的目的和要求1.1目的磁盘是经常使用的一种重要的外设,对磁盘数据的寻道时间的长短直接影响机器的整体运行速度,本设计要求用C语言(或高级语言)编写程序模拟实现磁盘调度的常用算法。
以加深对磁盘调度常用算法的理解和实现技巧。
1.2要求1)、设计一个函数完成先来先服务的磁盘调度功能。
2)、设计一个函数完成最短寻道时间优先的磁盘调度功能。
3)、设计一个函数完成电梯算法的磁盘调度功能。
二、系统需求分析2.1任务介绍1、可利用先来先服务算法(FCFS即first come first served)、最短寻道时间优先算法(SSTF即shortest seek time first)、扫描算法(SCAN),来实现磁盘的访问顺序。
操作系统课程设计-磁盘调度算法
前言摘要:本课程设计的目的是通过设计一个磁盘调度模拟系统,从而使磁盘调度算法更加形象化,使磁盘调度的特点更简单明了,这里主要实现磁盘调度的四种算法,分别是:1、先来先服务算法(FCFS) 2、最短寻道时间优先算法(SSTF) 3、扫描算法(SCAN) 4、循环扫描算法(CSCAN)。
启动磁盘执行输入输出操作时,要把移动臂移动到指定的柱面,再等待指定扇区的旋转到磁头位置下,然后让指定的磁头进行读写,完成信息传送;因此,执行一次输入输出所花的时间有:寻找时间——磁头在移动臂带动下移动到指定柱面所花的时间。
延迟时间——指定扇区旋转到磁头下所需的时间。
传送时间——由磁头进程读写完成信息传送的时间,寻道时间——指计算机在发出一个寻址命令,到相应目标数据被找到所需时间;其中传送信息所花的时间,是在硬件设计时固定的,而寻找时间和延迟时间是与信息在磁盘上的位置有关;然后设计出磁盘调度的设计方式,包括算法思路、步骤,以及要用到的主要数据结构、函数模块及其之间的调用关系等,并给出详细的算法设计,对编码进行了测试与分析。
最后进行个人总结与设计体会。
关键词:最短寻道时间优先算法、扫描算法、总寻道长度.目录前言 (2)2. 课程设计任务及要求 (4)2.1 设计任务 (4)2.2 设计要求 (4)3. 算法及数据结构 (5)3.1算法的总体思想(流程) (5)3.2 实现过程中用到的数据结构 (6)3.3 实现过程中用到的系统调用 (11)4. 程序设计与实现 (11)4.1 最短寻道时间优先算法(SSTF)模块 (11)4.1.1程序流程图 (11)4.1.2 程序说明 (13)4.1.3 程序关键代码 (13)4.2扫描算法(SCAN)模块 (14)4.2.1 程序流程图 (14)4.2.2 程序说明 (16)4.2.3 程序关键代码 (16)4.3 实验结果 (17)5. 结论 (26)6. 参考文献 (26)7. 收获、体会和建议 (27)2. 课程设计任务及要求2.1 设计任务1.熟悉并掌握磁盘调度算法管理系统的设计方法,加强对所学各种调度算法及相应算法的特点了解。
磁盘调度算法与代码的实现课程设计报告

课程设计报告计算机操作系统课程设计题目:磁盘调度算法目录1.需求分析2.总体设计和分类介绍1)先来先服务(FCFS)算法2)最短寻道时间优先(SSTF)算法3)扫描调度(SCAN)算法4)循环扫描(C-SCAN)算法3.课程设计的目的4.课程设计要求5.详细设计和算法流程图1)总流程图2)先来先服务(FCFS)算法流程图033)最短寻道时间优先(SSTF)算法流程图4)扫描调度(SCAN)算法流程图5)循环扫描(C扫描)算法流程图6.课程设计的具体步骤1)定义功能部分的主代码2)先来先服务(FCFS)算法部分主要代码3)最短寻道时间优先(SSTF)算法部分的主代码4)扫描调度(SCAN)算法部分主要代码5) C-SCAN算法部分主代码7.课程设计结果显示,……………………………1)先来先服务(FCFS)算法测试结果2)最短寻道时间优先(SSTF)算法的测试结果3)扫描调度(SCAN)算法测试结果4)循环扫描(C-SCAN)算法测试结果8.课程设计概要9.经验之谈10.参考文献磁盘调度算法一.需求分析编译器使用四种磁盘调度算法来调度磁盘,它们是先来先服务(FCFS)算法、最短寻道时间优先(SSTF)算法、扫描调度算法和循环扫描算法。
二。
总体设计和分类介绍磁盘调度常用的算法有四种,它们的作用如下:1.先来先服务算法。
先来的请求首先被回答。
FCFS策略看起来相当公平,但是当请求的频率太高时,FCFS策略的响应时间会大大延长。
FCFS策略为我们建立了一个随机访问机制的模型,但是如果我们用这个策略反复响应从内部到外部的请求,会消耗大量的时间。
为了最小化寻道时间,我们似乎需要对等待的请求进行适当的排序,而不是简单地使用FCFS策略。
这个过程称为磁盘调度管理。
有时FCFS也被认为是最简单的磁盘调度算法。
2.最短寻道时间优先(SSTF)算法。
所需要的磁道离当前磁头所在的磁道最近,以尽量减少每次寻道的时间。
3.扫描调度算法。
操作系统实验磁盘调度算法实验报告

操作系统实验磁盘调度算法实验报告一.实验目的本实验旨在通过磁盘调度算法的模拟,探究不同调度算法对磁盘访问性能的影响,了解各种算法的特点和适用场景。
二.实验方法本实验通过编写磁盘调度模拟程序,实现了三种常见的磁盘调度算法:FCFS(先来先服务)、SSTF(最短寻找时间优先)和SCAN(扫描算法)。
实验中使用C语言编程语言,并通过随机生成的队列模拟磁盘访问请求序列。
三.实验过程1.FCFS(先来先服务)算法FCFS算法是一种非常简单的调度算法,它按照请求到达的顺序进行调度。
在实验中,我们按照生成的请求队列顺序进行磁盘调度,记录每次磁头移动的距离。
2.SSTF(最短寻找时间优先)算法SSTF算法是一种动态选择离当前磁头位置最近的磁道进行调度的算法。
在实验中,我们根据当前磁头位置和请求队列中的磁道位置,选择距离最近的磁道进行调度。
然后将该磁道从请求队列中移除,并记录磁头移动的距离。
3.SCAN(扫描算法)算法SCAN算法是一种按照一个方向进行扫描的算法,它在每个方向上按照磁道号的顺序进行调度,直到扫描到最边缘磁道再折返。
在实验中,我们模拟磁头从一个端点开始,按照磁道号从小到大的顺序进行调度,然后再折返。
记录磁头移动的距离。
四.实验结果与分析我们通过生成不同数量的请求队列进行实验,记录每种算法的磁头移动距离,并进行比较。
实验结果显示,当请求队列长度较小时,FCFS算法的磁头移动距离较短,因为它按照请求到达的顺序进行调度,无需寻找最短的磁道。
然而,当请求队列长度较大时,FCFS算法的磁头移动距离会显著增加,因为它不能根据距离进行调度。
SSTF算法相对于FCFS算法在磁头移动距离上有了明显改进。
SSTF算法通过选择最短的寻找时间来决定下一个访问的磁道,因此可以减少磁头的移动距离。
然而,在请求队列中存在少量分散的请求时,SSTF算法可能会产生扇区的服务死锁现象,导致一些磁道无法及时访问。
SCAN算法通过扫描整个磁盘来进行调度,有效解决了FCFS算法有可能导致的服务死锁问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华南农业大学数学与信息学院(软件学院)《操作系统分析与设计实习》成绩单开设时间:2015学年第一学期评价指标:题目内容和要求完成情况 优□ 良□ 中□ 差□ 对算法原理的理解程度 优□ 良□ 中□ 差□ 程序设计水平 优□ 良□ 中□ 差□ 程序运行效果及正确性 优□ 良□ 中□ 差□ 课程设计报告结构清晰 优□ 良□ 中□ 差□ 报告中总结和分析详尽 优□良□ 中□ 差□一、需求分析(1)输入的形式和输入值的范围:在文本框输入序列长度,输入值为int 类型 (2)输出的形式:输出每种磁盘调度算法的服务序列; 输出每种算法的平均寻道长度。
(3)程序所能达到的功能:模拟实现FCFS 、SSTF 、SCAN 、C-SCAN 算法,并计算及比较磁头移动道数。
(4)测试数据:包括正确的输入及其输出结果和含有错误的输入及其输出结果:二、概要设计1)主程序流程图:输出随机生成400个磁道号序列主菜单选择算法开始FCFS SSTFSCANC-SCAN 结束(2)各程序模块之间的调用关系磁头初始位置输入及合法性检查冒泡排序算法由外向内输出磁道序列由内向外输出磁道序列由当前位置向内再向外输出磁道序列由当前位置向外再向内输出磁道序列由当前位置向内再由外向内输出磁道序列由当前位置向外再由内向外输出磁道序列就近选择主函数FCFSSSFTSCANC-SCAN三、详细设计1)各操作伪码算法(1)实现磁头初始位置的输入并进行合法性检查int printstarter()//磁头初始位置输入{输入:磁头初始位置;if输入小于0或大于1500{输出:"输入数据类型有误,请重新输入!" <<endl;重新输入}Else 返回合法的磁头初始位置}(2)冒泡排序算法int *bubble//冒泡排序算法{for 从数组的第一个元素开始重复{依次和后续元素表较大小;If后面元素大于当前元素交换数值;}输出排序后的数组;返回数组;}(3)int out_to_in//由磁道最外向内输出磁道序列{for 从最外磁道开始{依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;磁头初始位置=当前磁道号;}返回绝对值之和;}(4)int in_to_out//由磁道最内向外输出磁道序列{for 从最内磁道开始{依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;磁头初始位置=当前磁道号;}返回绝对值之和;}(5)int out_to_in_to_out//先由当前位置向内再向外{找到小于等于磁头初始位置的磁道for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}for由该磁道的外侧磁道开始{向外依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}返回绝对值之和;}(6)int in_to_out_to_in//先由当前位置向外再向内{找到大于等于磁头初始位置的磁道for由该磁道开始{向外依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}for由该磁道的内侧磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}返回绝对值之和;}(7)int out_to_in_twice由当前磁道向内再从最外向内{找到小于等于磁头初始位置的磁道;for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}for由最外侧磁道开始{向内依次输出磁道号直到小于等于初始位置的磁道的外侧一个磁道;当前磁道号与磁头初始未至的绝对值求和;}返回绝对值之和;}(8)int in_to_out_twice由当前磁道向外再从最内向外{找到大于等于磁头初始位置的磁道for由该磁道开始{向内依次输出磁道号;当前磁道号与磁头初始未至的绝对值求和;}for由最内侧磁道开始{向外依次输出磁道号直到小于等于初始位置的磁道的内侧一个磁道;当前磁道号与磁头初始未至的绝对值求和;}返回绝对值之和;}(9)int nearest_select就近选择{找到大于磁头初始位置的磁道;while初始位置内侧差绝对值更小{ 输出内侧磁道号;绝对值差求和;初始位置更新为当前磁道号;}while 初始位置外侧绝对值差更小{输出外侧磁道号;绝对值差求和;初始位置更新为当前磁道号;}}If已到达最内侧未到达最外侧{if内侧绝对值差更小{输出最内侧磁道号;绝对差值求和;初始位置更新;while 向外侧依次输出磁道号直到到达最外侧 {绝对差值求和;更新初始位置;}}else外侧绝对值差更小{While向外侧依次输出磁道号直到到达最外侧 {绝对差值求和;更新初始位置;}输出最内侧磁道号;绝对差值求和;更新初始位置;}}if 已到达最外侧未到达最内侧{If外侧绝对值更小{输出最外侧磁道号;绝对差值求和;更新初始位置;while向内依次输出磁道号{绝对差值求和;更新初始位置;}}else{while 向内依次输出磁道号{绝对差值求和;更新初始位置;}输出最外侧磁道号;绝对值差求和;更新初始位置;}}if均到达最内侧和最外侧{if 外侧差绝对值更小{输出最外侧磁道号并绝对值差求和;输出最内侧磁道号并绝对值差求和;}else{输出最内侧磁道号并绝对值差求和;输出最外侧磁道号并绝对值差求和;}}求总和并返回;}(10)void FCFS算法{输出磁盘请求序列为;按照磁盘请求序列依次输出磁盘扫描序列;当前磁道号与磁头初始未至的绝对值求和;求平均值;输出平均寻道长度;}(11)void SSTF算法{if序列中最大的磁道号小于磁头初始位置{调用out_to_in直接由外向内;}if 序列中最小的磁道号大于磁头初始位置 {调用in_to_out直接由内向外;}If 磁头初始位置为中间值{调用就近选择算法;}求均值;输出平均寻道时间;}(12)void SCAN算法{输入:磁臂移动方向(1:向外,0:向内);if 序列中最大的磁道号小于磁头初始位置{调用out_to_in直接由外向内;}if序列中最小的磁道号大于磁头初始位置{调用in_to_out直接由内向外;}if 初始磁头位置为中间值{if 磁臂方向向内调用out_to_in_to_out;}if 磁臂方向向外{调用n_to_out_to_in;}}求均值;输出平均寻道时间;}(13)Viod C-SCAN算法{请输入磁臂移动方向(1:向外,0:向内);if 序列中最大磁道号小于等于磁头初始位置{if磁臂方向向内{调用out_to_in;}if磁臂方向向外{调用in_to_out;}if 序列中最大磁道号大于等于磁头初始位置{if磁臂方向向内{调用out_to_in;}if磁臂方向向外{调用in_to_out;}}if初始磁头位置为中间值{if (磁臂方向向内{调用out_to_in_twice;}if 磁臂方向向外{调用in_to_out_twice);}}求均值;输出平均寻道时间;}(14)主函数int main(){随机生成200个0~499的磁道序列并输出;随机生成100个500~999的磁道序列并输出;随机生成100个1000~1500的磁道序列并输出;输出:主菜单;输入:用户选择并进行合法性检查switch (用户选择){case 1:调用FCFS();case 2:调用SSTF()case 3:调用SCAN()case 4:调用C-SCAN()case 5:退出}}2)函数的调用关系图四、调试分析1)调试过程中遇到的问题以及对设计与实现的讨论和分析:(1)随机生成400个磁道号序列:使用rand()函数,对于:50%位于 0~499,25%分布在 500~999,25%分布在 1000~1499,采用如下方法解决:track[i] = (rand() % 500);track[i] = (rand() % 500)+500;track[i] = (rand() % 500)+1000;(2)通过对每一行的输出设置断点判断问题出现在哪里,把出问题的地方缩小到一定范围,然后解决问题,如若解决不出则上网查询。
算法部分SSTF算法实现的比较复杂,时间复杂度较高。
2)算法的时间复杂性(包括基本操作和其他算法的时间复杂性的分析)和改进设想:(1)FCFS算法:时间复杂度为O(n),一重循环,算法比较简单;(2)SSTF算法:时间复杂度为O(n^2),二重循环,算法较为复杂;(3)SCAN算法:时间复杂度为O(n);(4)C-SCAN算法:时间复杂度为O(n);3)设计过程的经验和体会:设计过程必须要按照自顶向下的结构化设计方法,各个模块要很清晰的体现,并且要考虑时间复杂度。
整个程序的结构是很清晰的,首先在0~1500的范围内随机生成400个磁道号序列,接着是主菜单选择要使用的算法,各个算法的结构通过调用不同的输出磁道序列函数来实现,并进行绝对值的求和以及平均值的计算。
五、用户使用说明1)按照菜单输入选择何种算法在1~5之间;2)输入磁头初始位置在0~1500之间;3)输入磁臂方向,1:向外,0:向内;六、测试与运行结果1)初始界面,产生400个随机序列,选择算法:2)FSFC算法:3)SSTF算法:4)SCAN算法:(1)最小磁道号大于等于初始磁头位置,测试与运行结果:输出请求序列、平均寻道时间:(2)最大磁道号小于等于磁头初始位置,测试与运行结果:输出请求序列、平均寻道时间:(3)方向0,磁头初始位置为中间值,测试与运行结果:输出请求序列、平均寻道时间:(4)方向1,磁头初始位置为中间值,测试与运行结果:输出请求序列、平均寻道时间:5)C-SCAN算法:(1)方向0,最小磁道号大于等于初始磁头位置,测试与运行结果:输出请求序列、平均寻道时间:(2)方向0,最大磁道号小于等于磁头初始位置,测试与运行结果:输出请求序列、平均寻道时间:(3)方向1,最小磁道号大于等于初始磁头位置,测试与运行结果:输出请求序列、平均寻道时间:(4)方向1,最大磁道号小于等于磁头初位置,测试与运行结果:输出请求序列、平均寻道时间:(5)方向0,磁头初始位置为中间值,测试与运行结果:输出请求序列、平均寻道时间:(6)方向1,磁头初始位置为中间值,测试与运行结果:输出请求序列、平均寻道时间:七、总结感想这次的操作系统课程设计,让我对操作系统磁盘调度策略有了更加深刻的认识,自己动手操作比光看书能更能深刻了解磁盘调度的策略和原理,同时对磁盘调度的四种算法——先来先服务算法(FCFS)、最短寻道时间优先算法(SSTF)、SCAN算法,C-SCAN算法有了更深刻的理解和掌握。
设计过程中遇到的困难在老师和同学的帮助下顺利解决,我深刻认识到算法的逻辑性和时间复杂度对程序的重要影响,算法的准确度对程序运行结果的重要影响,这对我以后在操作系统的学习中有极大帮助。