旋转变压器分类及接口电路
第一课旋转变压器
– Z生1-磁Z2场、 Z3-Z4、D3-D4无电流,不产
– 总旋结转:变由压定器子的绕气组隙D中1产-D生2的脉电振流磁在场
• 绕组电势
D1
D3
D4
Us1
D2
Z1
θ
Z4
Z3
Z2
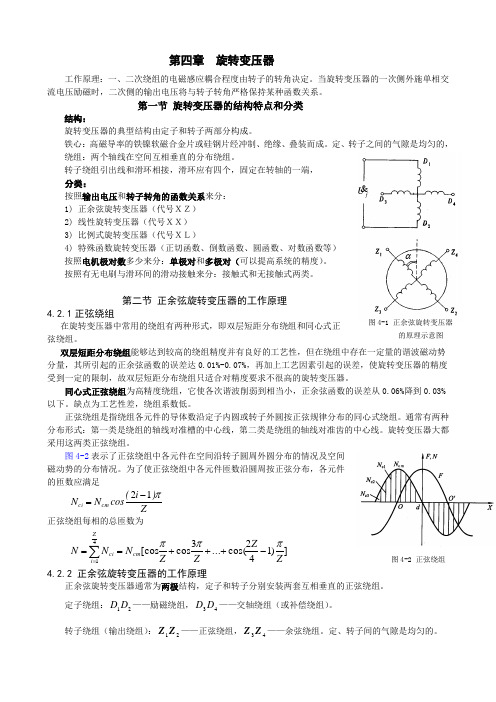
控 空载时的旋转变压器
制
• 空载条件 • 磁场情况
电 • 绕组电势
– 磁场:在绕组轴线方向铰链绕组的磁场在
机
绕组上产生感应电势
• 输出特性畸变
Z1
θ
Z4
Bzq Z3
IR2 Bz Bzd
Z2
ZL
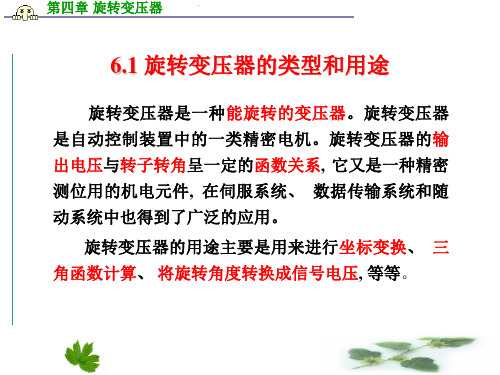
控 负载时的旋转变压器
制
• 负载运行
电 • 磁场情况
机 • 输出绕组电势
• 输出特性畸变
– 输出电压UR2= ER2d- ER2q
– ER2d = -ku Us1 sin θ ∝ BjCOS θ – ER2q ∝ BZ COS2 θ
Z4
E1
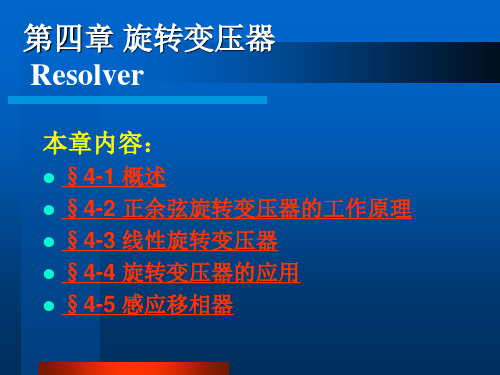
– E= ER2-E2= E1cosθ - E2
Z3
– 伺服电动机停止运行时,理
Z2
想运放输出为零。所以
E1cosθ - E2=0
– θ =arccos(E2 /E1)
θ D1
D3
D4 E
>
D2
E2
控 制 电 机
精品课件!
控 制 电 机
精品课件!
控 制 电 机
D1
BD
– 合成磁场
D3
D4
• ΣBd=BD+BZd=Bj( Bj:空载时的激磁磁场) Us1 • ΣBq= BZq= BZCOS θ
D2
• 输出绕组电势:
– ER2d= -ERsin θ, ER =4.44wRfØD ,(Bj—ØD) – ER2q= 4.44wRfØq34
第四章旋转变压器
第四章 旋转变压器工作原理:一、二次绕组的电磁感应耦合程度由转子的转角决定。
当旋转变压器的一次侧外施单相交流电压励磁时,二次侧的输出电压将与转子转角严格保持某种函数关系。
第一节 旋转变压器的结构特点和分类结构:旋转变压器的典型结构由定子和转子两部分构成。
铁心:高磁导率的铁镍软磁合金片或硅钢片经冲制、绝缘、叠装而成。
定、转子之间的气隙是均匀的,绕组:两个轴线在空间互相垂直的分布绕组。
转子绕组引出线和滑环相接,滑环应有四个,固定在转轴的一端, 分类:按照输出电压和转子转角的函数关系来分:1) 正余弦旋转变压器(代号XZ) 2) 线性旋转变压器(代号XX) 3) 比例式旋转变压器(代号XL)4) 特殊函数旋转变压器(正切函数、倒数函数、圆函数、对数函数等)按照电机极对数多少来分:单极对和多极对(可以提高系统的精度)。
按照有无电刷与滑环间的滑动接触来分:接触式和无接触式两类。
第二节 正余弦旋转变压器的工作原理4.2.1正弦绕组在旋转变压器中常用的绕组有两种形式,即双层短距分布绕组和同心式正弦绕组。
双层短距分布绕组能够达到较高的绕组精度并有良好的工艺性,但在绕组中存在一定量的谐波磁动势分量,其所引起的正余弦函数的误差达0.01%-0.07%,再加上工艺因素引起的误差,使旋转变压器的精度受到一定的限制,故双层短距分布绕组只适合对精度要求不很高的旋转变压器。
同心式正弦绕组为高精度绕组,它使各次谐波削弱到相当小,正余弦函数的误差从0.06%降到0.03%以下。
缺点为工艺性差,绕组系数低。
正弦绕组是指绕组各元件的导体数沿定子内圆或转子外圆按正弦规律分布的同心式绕组。
通常有两种分布形式:第一类是绕组的轴线对准槽的中心线,第二类是绕组的轴线对准齿的中心线。
旋转变压器大都采用这两类正弦绕组。
图4-2表示了正弦绕组中各元件在空间沿转子圆周外圆分布的情况及空间磁动势的分布情况。
为了使正弦绕组中各元件匝数沿圆周按正弦分布,各元件的匝数应满足Z)i (cosN N cm ci π12-= 正弦绕组每相的总匝数为])142cos(...3cos [cos 41Z Z Z Z N N N cm Zi ci πππ-+++==∑=4.2.2 正余弦旋转变压器的工作原理正余弦旋转变压器通常为两极结构,定子和转子分别安装两套互相垂直的正弦绕组。
旋线式旋转变压器简介

4.6 电梯上的应用
旋转变压器在电梯上面的应用,主要是用于电机门机以及曳引机上面,主要是作 为位置传感器使用。三菱电梯已把旋变使用于永磁同步门机,上海桑塔斯曳引机 也已经使用旋转变压器作为位置传感器另外我公司生产的旋转变压器比较容易实 现外转子结构,可以使曳引机的结构更加简单、可靠。
4.2 纺织上的行业应用
旋转变压器在纺织机械上面,尤其以袜机为主,织布机、梳棉机上面也越来越大面积 开始使用,主要是由于旋转变压器相比光电编码器有极大的优势,诸如抗震动、耐油污、 寿命长等优点,特别适合纺织行业的S4工作制。目前浙江恒强、苏拉纺机、意达纺机、浙 江奔特等相关单位,都已经大面积使用旋转变压器。
4.3 油田机械上的应用
旋转变压器在油田机械上的应用主要有抽油机电机、磕头机及钻头电机上作位置反馈 元件,因为其环境较恶劣,有大孔径要求等,如江汉油田、胜利油田等。
4.4 风电行业上的应用
旋转变压器主要应用于风力发电的变浆电机中,一般以绕线式无刷旋变为主。
4.5 数控机床上的应用
旋转变压器在机床主轴中一般以绕线式无刷旋变为主,作为 主轴电机和转台定位电机的反馈元件。
2.1 旋转变压器使用原则
(1) 旋转变压器应尽可能在接近空载的状态下工 作。因此,负载阻抗应远大于旋转变压器的输出阻抗。
两者的比值越大,输出电压的畸变就越小。
(2) 使用时首先要准确地调准零位,否则会增加 误差,降低精度。 (3) 励磁一方只用一相绕组时,另一相绕组应该 短路或接一个与励磁电源内阻相等的阻抗。
5)平衡负载 旋变两相输出端负载不对称时,会产生误差。所以, 使用时注意两相负载平衡。另外,负载的阻抗值应该 尽可能的大,以免会对旋转变压器的工作产生影响。 6)接线正确 按照规定的标示接线,正弦相、余弦相以及励磁的正 方向都不能错。
第6章旋转变压器解析ppt课件
根据楞次定律,旋转变压器工作时交轴磁通 Φq34
在绕组D3-D4中要感生电流,该电流产生的磁通对交轴 磁通 Φq34有着强烈的去磁作用,从而达到补偿的目的。
第四章 旋转变压器
返回
图 6 - 6 原边补偿的正余弦旋转变压器
第四章 旋转变压器
可以证明, 当定子交轴绕组外接阻抗Z等于励磁电源内阻 抗Zn, 即Z=Zn时, 由转子电流所引起的输出特性畸变可以 得到完全的补偿。 因为一般电源内阻抗Zn值很小, 所以 实际应用中经常把交轴绕组直接短路, 同样可以达到完全 补偿的目的。
改写为:
U R1 U f1
ku
cos
(6-13)
式中,转角 在0o-360o之间变化,cos 在+1~-1范围内变
动,因为变比 k u 为常数,故比值 U R1 U f 1 将在 ku 范围 内变化。如果调节 到某定值,则得到唯一的 U R1 U f 1,
这就是比例式旋转变压器的工作原理。
(6-3)
与变压器类似,忽略定子励磁绕组内阻和漏电抗, 则ED=Uf1,空载时转子输出绕组电势等于电压,则式6-3 可写成:
U R1 kuU f 1 cos U R2 kuU f 2 sin
(6-4)
第四章 旋转变压器
6.3.2 负载后输出特性的畸变
图6-3
旋转变压器在运行时总要接上一定的负载, 如图6-3中 Z1、 Z2输出绕组接入负载阻抗ZL1。 旋转变压器的输出电 压随转角的变化已偏离正弦关系, 空载和负载时输出特性 曲线的对比如图 4 - 5 所示。 如果负载电流越大, 两曲线的 差别也越大。这种输出特性偏离理论上的正余弦规律的现 象被称为输出特性的畸变。 但是, 这种畸变必须加以消除, 以减少系统误差和提高精确度。
旋转变压器 ppt课件

6.3 正余弦旋转变压器的工作原理
一、旋转变压器空载时
输出绕组Z1 Z2和Z3 Z4以及定子交轴绕组D3D4开路, 激磁绕组施加交流激磁电压Uf1 。
BD D1
Uf1 D3
D4
D2
此时气隙中将产生一个脉振磁 场BD ,该磁场的轴线与定子激磁 绕组D1D2的轴线重合。
Z1 θ Z3
Z4 设定子绕组D1D2轴线和余弦输出 绕组Z1 Z2轴线的夹角为θ
二、旋转变压器带载时
D1 BD D3 Uf1
实验表明,图中正弦输出绕 D4 组Z3Z4带上负载以后,其输出
电压不再是转角的正弦函数。
Z1
D2
θ
Z4
Z3
ZL
Z2
空载
Um Um
负载
0
90o
空载 Um Um
左图表示了旋转变压
器空载和负载时输出特性
的对比。
Why?
负载
负载电流越大,
0
90o 二者的差别也越大。
Eq34 BZ cos2θ
在一定的转角下, Eq34 正比于 BZ ,而BZ正比于 IR2 ,所以负载电流越大, Eq34也越大,输出特 性偏离正弦函数关系就越远。
Z1 θ Eq34 Z4
BZq
Bq34 Z3
ER2 Bz BZd
IR2
Z2
因此,旋转变压器有载时, 输出特性的畸变,主要是由 交轴磁通引起的。为了消除 畸变,就必须设法消除交轴 ZL 磁通的影响。消除畸变的方 法称为补偿。
360o
• 单极旋变B点(θ0)—U2(1)=Um(1)sinθ不能 驱动伺服电动机
• 多极旋变A点(θ0)—U2(p)=Um(p)sin(pθ) 能够驱动伺服电动机
旋转变压器详解

旋转变压器(重点在于输入输出的关系)伺服传感器按被测量分类:位移传感器、速度传感器、加速度传感器、电流传感器。
位移传感器、速度传感器、加速度传感器各有直线和旋转角度的两种方式。
(1)旋转变压器概述⒈⒈旋转变压器的发展旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。
由于制作和精度的缘故,磁性编码器没有其他两种普及。
光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
和光学编码器相比,旋转变压器有这样几点明显的优点:①无可比拟的可靠性,非常好的抗恶劣环境条件的能力;②可以运行在更高的转速下。
(在输出12 bit的信号下,允许电动机的转速可达60,000rpm。
而光学编码器,由于光电器件的频响一般在200kHz以下,在12 bit时,速度只能达到3,000rpm);③方便的绝对值信号数据输出。
⒈⒉旋转变压器的应用这些年来,随着工业自动化水平的提高,随着节能减排的要求越来越高,效率高、节能显著的永磁交流电动机的应用,越来越广泛。
而永磁交流电动机的位置传感器,原来是以光学编码器居多,但这些年来,却迅速地被旋转变压器代替。
可以举几个明显的例子,在家电中,不论是冰箱、空调、还是洗衣机,目前都是向变频变速发展,采用的是正弦波控制的永磁交流电动机。
目前各国都在非常重视的电动汽车中,电动汽车中所用的位置、速度传感器都是旋转变压器。
例如,驱动用电动机和发电机的位置传感、电动助力方向盘电机的位置速度传感、燃气阀角度测量、真空室传送器角度位置测量等等,都是采用旋转变压器。
第四章 旋转变压器
jKu X m 2 cos 2
Zr Z l1 jKu2 X m 2 2 2 2 2 Z X Z Z jK X jK X sin jK X cos u m u m u m s m r l1 2 Zr Z l 2 jKu X m
2 0 jI f Ku X m sin I r1 Zr Zl1 jKu X m
i
正弦输出绕组电流、电压
I r1
Z s Z r Z l1 Z r Z l1 K u2 Z s jK u2 X m cos 2 jX m
K u U f sin
励磁回路电压方程
余弦绕组回路电压方程
K X cos I Z Z jK X 0 jI
2 f u m r2
r
l2
u
m
解得
I f Zs jX m
Ir1
jKu X m 2 sin 2
2 u
U f
Zr Z l1 jK X m Zr Z l 2 jKu2 X m sin jKuU f
第四章 旋转变压器 Resolver
本章内容:
§4-1 概述 §4-2 正余弦旋转变压器的工作原理 §4-3 线性旋转变压器 §4-4 旋转变压器的应用 §4-5 感应移相器
§4-1概述
旋转变压器是自动控制装置中的一类精密控 制微电机。从物理本质看,可以认为是一种可以 旋转的变压器,这种变压器的原、副边绕组分别 放置在定子和转子上。当旋转变压器的原边施加 交流电压励磁时,其副边输出电压将与转子的转 角保持某种严格的函数关系,从而实现角度的检 测、解算或传输等功能。
旋转变压器基础知识

旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
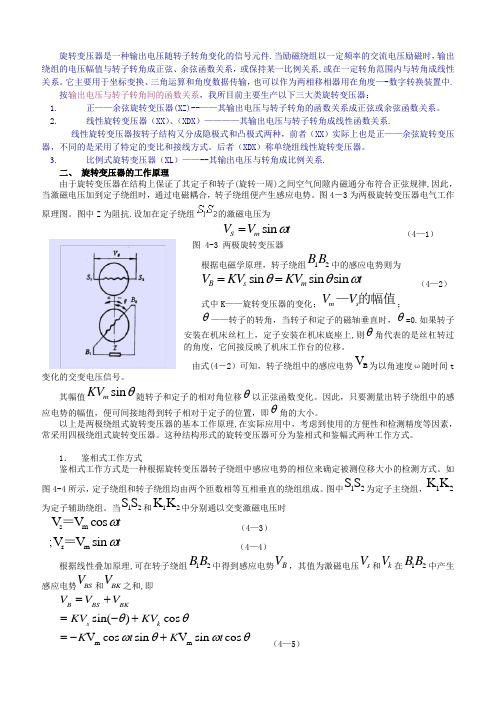
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值ms V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
旋转变压器
应用
旋转变压器旋转变压器是一种精密角度、位置、速度检测装置,适用于所有使用旋转编码器的场合,特别是 高温、严寒、潮湿、高速、高震动等旋转编码器无法正常工作的场合。由于旋转变压器以上特点,可完全替代光 电编码器,被广泛应用在伺服控制系统、机器人系统、机械工具、汽车、电力、冶金、纺织、印刷、航空航天、 船舶、兵器、电子、冶金、矿山、油田、水利、化工、轻工、建筑等领域的角度、位置检测系统中。也可用于坐 标变换、三角运算和角度数据传输、作为两相移相器用在角度--数字转换装置中。
图1是有刷式旋转变压器。它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与 滑环是机械滑动接触的,所以旋转变压器的可靠性差,寿命也较短。
图1有刷式旋转变压器
图2无刷式旋转变压器
图2是无刷式旋转变压器。它分为两大部分,即旋转变压器本体和附加变压器。附加变压器的原、副边铁心及 其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。旋转变压器本体的转子绕组与附加变压器 原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器 副边线圈间接地送出去。这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及 使用寿命,但其体积、质量、成本均有所增加。
旋转变压器一般有两极绕组和四极绕组两种结构形式。两极绕组旋转变压器的定子和转子各有一对磁极,四 极绕组则各有两对磁极,主要用于高精度的检测系统。除此之外,还有多极式旋转变压器,用于高精度绝对式检 测系统。
分类
旋转变压器按输出电压与转子转角间的函数关系,主要分三大类旋转变压器:
1.正--余弦旋转变压器----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
结构
旋转变压器工作原理ppt课件

按旋转变压器的输出电压和转子转角间的函数 关系, 旋转变压器可分为正余弦旋转变压器、 线性旋转变压器以及比例式旋转变压器。
按有无电刷与滑环间的滑动接触来分类,旋转 变压器可分为接触式和无接触式两大类,其中 无接触式旋转变压器运行可靠,抗震动,适应 恶劣环境。
04 旋转变压器的使用
旋转变压器在EPS系统上面的应用
EPS是一个典型的电机伺服系统。在EPS中,汽车转向时,转矩传感器检测到转向盘的力 矩和转动方向,将这些信号输送到电控单元,电控单元根据转向盘的转动力矩、转动方向和 车辆速度等数据向电动机控制器发出信号指令,使电动机输出相应大小及方向的转动力矩以 产生助动力。
04 旋转变压器的使用
旋转变压器在袜机、织布机上面的应用
旋转变压器在纺织机械上面,尤其以袜机为主,织布机、梳棉机上面也越来越大面积 开始使用,主要是由于旋转变压器相比光电编码器有极大的优势,诸如抗震动、耐油污、 寿命长等优点,特别适合纺织行业的S4工作制。
04 旋转变压器的使用
旋转变压器在油田电机上面的应用
4.3 旋转变压器的使用原则
(1) 旋转变压器应尽可能在接近空载的状态下工作。因此,负载阻抗应远大于旋转变压器的输出 阻抗。两者的比值越大,输出电压的畸变就越小。
(2) 使用时首先要准确地调准零位,否则会增加误差,降低精度。 (3)励磁一方两相绕组同时励磁时,即只能采用二次侧补偿方式时,两相输出绕组的负载阻抗应 尽可能相等。
EPS必须满足很高的实时性和较高的精度要求,同时,要确保其具有高的可靠性。无刷旋 转变压器是较好的选择。
2020旋转变压器课件

二、旋转变压器结构 旋转片冲叠而成; 绕组:在定子铁芯和转子铁芯上分别安装有两个在空间上互相 垂直的高精度正弦绕组; 通常设计为2极,转子绕组经电刷和集电环引出。 正余弦旋转变压器结构图如图所示。
4-2 正余弦旋转变压器
1、按有无滑动接触分类 接触式(多用) 无接触式 又分为有限转角和无限转角
2、按极对数分类 单极对数(多用) 多极对数:主要用于电气变速的高精度双通道系统中
3、按使用要求分类 解算装置:正余弦旋转变压器 输出电压与转子转角成正余 弦函数关系 线性旋转变压器 输出电压与转子转角成线性关系 比例式旋转变压器 作为调整电压的比例元件 特殊函数旋转变压器 随动系统:旋转变压器发送机 旋转变压器差动发送机 旋变变压器
第四章 旋转变压器
§4-1概述 旋转变压器是自动装置中较常用的精密控制电机。
当旋转变压器的定子绕组施加单相交流电时,其转子绕组输 出的电压与转子转角成正弦余弦关系或线性关系等函数关系。
在自动控制系统中可以用作解算元件,实现坐标变换和三角 运算等,在随动系统中,用来传输与角度对应的电信号,此外 还可以用作移相器和角度-数字转换装置等等。 一、旋转变压器分类
据上述分析,气隙磁场Φd在励磁绕组中所感生的电动势为气隙 磁通的两个分量Φr1和Φr2分别在输出绕组Z1Z2和Z3Z4中所感生的 电动势为
E r 1 j 4 . 4 fr k N 4 r r 1 j 4 . 4 fr k N 4 r d sin
E r 2 j 4 . 4 fr k 4 N r r 2 j 4 . 4 fr k 4 N r d cos
Xm 定子激磁绕组主电抗(Xm L1) 设正弦绕组与交轴绕组夹角为时,定子激磁绕组
与正弦绕组夹角为900 。
则激磁绕组与正弦绕组间的互感为:Xfr1 co( s 900 ) ku Xm sin
旋转变压器基础知识【范本模板】
旋转变压器是一种输出电压随转子转角变化的信号元件.当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度—-数字转换装置中.按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正——余弦旋转变压器(XZ)--——其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )————其输出电压与转子转角成线性函数关系.线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正——余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )——--其输出电压与转角成比例关系.二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗.设加在定子绕组的激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值m s V V ;θ——转子的转角,当转子和定子的磁轴垂直时,θ=0.如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
旋线式旋转变压器简介讲解

3. 位置传感器介绍
常用传感器介绍 光电编码器介绍
3.1 常用传感器介绍
作为速度及位置传感元件,常用的有这样几种:光学编码器、磁性编码器 和旋转变压器。由于制作和精度的缘故,磁性编码器没有其他两种普及。光 学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因 而得到了很好的应用。早期的旋转变压器,由于信号处理电路比较复杂,价 格比较贵的原因,应用受到了限制。因为旋转变压器具有无可比拟的可靠性 ,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事 以及航天、航空、航海等方面。
4.6 电梯上的应用
旋转变压器在电梯上面的应用,主要是用于电机门机以及曳引机上面,主要是作 为位置传感器使用。三菱电梯已把旋变使用于永ቤተ መጻሕፍቲ ባይዱ同步门机,上海桑塔斯曳引机 也已经使用旋转变压器作为位置传感器另外我公司生产的旋转变压器比较容易实 现外转子结构,可以使曳引机的结构更加简单、可靠。
4.7 航空航天上的应用
6)相位移 次级输出电压相对于初级励磁电压在时间上 的相位差。相位差的大小有关因素——旋变类型、尺 寸、结构和励磁频率。
7)基准相位 基准相位是指旋转变压器从基准电气零位 开始,作正向旋转时出现的第一个基波最大电压的相 位。
相位的规定方法:①初级励磁电压的相位为基准; ②以次级电压最大输出时的相位为基准。
2.2 旋转变压器使用注意事项
4)屏蔽 旋转变压器本身的磁场比较弱,当外部有强磁场靠近 旋转变压器时(例如在电动机中),会影响旋转变压 器的磁场和在旋转变压器绕组端部的磁状态,进而产 生误差电势,产生误差。因此,应该尽量使得旋转变 压器远离强磁场,以及采取磁屏蔽措施。
2.2 旋转变压器使用注意事项
油田机械上的应用
旋转变压器的接口电路

7.1.2旋转变压器的结构特点
旋转变压器的基本结构与隐极转子的控制式自整角机相似。
结构示意图
隐极结构,定转 子均为二相对称 绕组。
绕组原理图
图7-1旋转变压器定、转子绕组结构示意图 S1-S2定子励磁绕组,S3-S4定子交轴绕组,R1-R2转子余弦输出绕组,R3-R4 转子正弦输出绕组。
5
7.2 正余弦旋转变压器
23
INHIBIT ENABLE
7.4.2 AD2S83芯片
1. AD2S83芯片的引脚功能及特点
AD2S83芯片的引脚功能
引脚号 1 2 3 4 5 6 7 8 10~25 26 27 28 30 BYTE SELECT 名称 DEMOD O/P REFERENCE I/P AC ERROR O/P COS ANALOG GND SIGNAL GND SIN +Vs DB1~DB16 +VL 功能
出绕组作补偿时,称为二次
侧补偿。 若 Bs和 Bc 所产生的交轴分量 互相抵消时,则旋转变压器中就
不存在交轴磁通,也就消除了由
交轴磁通引起的输出特性的畸变。 图7-5副边补偿正余弦旋转变压器
12
7.2.2输出特性的补偿
要达到完全补偿,正、余弦输出绕组中感应电动势的大小和相位 应与空载时一样,即
Es K uU f sin Ec K uU f cos
E c 4.44 fN 2 k W2 m cos Es 4.44 fN 2 k W2 m cos(90 ) 4.44 fN 2 k W2 m sin
N1k W1 为定子绕组的有效匝数;
N 2 k W2 为转子绕组的有效匝数。
Es K u E f sin E c K u E f cos
旋转变压器工作原理PPT课件
分辨率高、通用接口
可靠性较差
分辨率高、可绝对定位
成本高,可靠性较差
可靠性高,高精度、可绝对定 位
使用麻烦
可靠性最高,结构简单紧凑 精度偏低,使用麻烦
02 旋转变压器的类型
02 旋转变压器的类型
从电机原理来看, 旋转变压器又是 一种能旋转的变压器。 这种变压器 的原、 副边绕组分别装在定、 转 子上。 原、 副边绕组之间的电磁 耦合程度由转子的转角决定, 故转 子绕组的输出电压大小及相位必然 与 按转 电子 机的 极转 数角 的有 多关 少。 来分,常见的旋 转变压器一般有两级绕组和四极绕 组两种结构形式,两级绕组变压器 的定子和转子各有一对磁极。除此 之外,还有多极旋转变压器,用于 高精度检测系统。
旋转变压器
演讲人:
CONTENT S
01 概述 02 旋转变压器的类型 03 正余弦旋转变压器 04 旋转变压器的使用
01 概述
01 概述
旋转变压器,又称同步分解器,是一种电磁式传感器,精密 测位用的机电元件,其输出电信号与转子转角成某种函数关系。 旋转变压器也是一种测量角度用的小型交流电动机,主要用来测 量旋作转为物体速的度转及轴位置角传位感移元和件角,速常度用。的有这 样几种:光学编码器、磁性编码器和旋转变 压器。由于制作和精度的缘故,磁性编码器 没有其他两种普及。光学编码器的输出信号 是脉冲,由于是天然的数字量,数据处理比 较方便,因而得到了很好的应用。早期的旋 转变压器,由于信号处理电路比较复杂,价 格比较贵的原因,应用受到了限制。因为旋 转变压器具有无可比拟的可靠性,特别是高 温,严寒、潮湿、高速、高振等。以及具有 足够高的精度,在许多场合有着不可代替的
精度 高 高 低
工艺性 差 一般 好
旋转变压器全面详解
可以证明, 当定子交轴绕组外接阻抗Z等于励磁电源内阻抗Zn, 即Z=Zn时, 由转子电流所引起的输出特性畸变可以得到完全的补偿。 因为一般电源
内阻抗Zn值很小, 所以实际应用中经常把交轴绕组直接短路, 同样可以达
到完全补偿的目的。
第6章 旋转变压器第6章 旋转变压器
6.3.5 原、 副边都补偿的正余弦旋转变压器
应移相器如何分别被用作精密位移测量和移相的元件。
第6章 旋转变压器第6章 旋转变压器
6.2 旋转变压器的结构特点
旋转变压器的典型结构与一般绕线式异步电动机相似。
它由定子和转子两大部分组成, 每一大部分又有自己的电磁
部分和机械部分, 如图 6 - 1所示, 下面以正余弦旋转变压器的
典型结构分析之。
第6章 旋转变压器第6章 旋转变压器
kuU s1 Z Z
cos
(6 - 9)
第6章 旋转变压器第6章 旋转变压器
将式(6 - 9)代入式(6 - 8)得以下两式:
FR1q
KIR1 sin
K
kuU s1 cos
Z Z
sin
FR 2 q
KIR2
c os
K
kuU s1 sin
ZL Z
c os
(6 - 10) (6 - 11)
第6章 旋转变压器第6章 旋转变压器
XX)以及比例式旋转变压器(代号为XL)。其中, 正余弦旋转变压器的输出
电压与转子转角成正余弦函数关系; 线性旋转变压器的输出电压与转子转
角在一定转角范围内成正比; 比例式旋转变压器在结构上增加了一个锁定
转子位置的装置。
第6章 旋转变压器第6章 旋转变压器
这些旋转变压器的用途主要是用来进行坐标变换、 三角函数计算和数 据传输、 将旋转角度转换成信号电压, 等等。 根据数据传输在系统中的 具体用途, 旋转变压器又可分为旋变发送机(代号为XF)、 旋变差动发送机 (代号为XC)和旋变变压器(代号为XB)。 其实, 这里数据传输的旋转变压 器在系统中的作用与相应的自整角机的作用是相同的。
旋转变压器原理种类及选用

显然应小 于1 给
2
定函数所取的点数n,即要求 。另外,所1 能n 选取的谐 2
波项数ν受到槽数限制,不可过多,否则齿谐波的影响
不可忽略。因此,项数ν不能随意选取,ν值越大,函数
逼近的计算精度就越高,但计算也越复杂,齿谐波的影
响也越严重。实际设计时应合理选择ν值,并通过与实验
样机的对比进行必要的修正。
(5) 开路输入阻抗(空载输入阻抗)。 输出绕组开 路时,从励磁绕组看进去的等效阻抗值。标准开路输 入阻抗有200、400、600、1000、2000、3000、 4000、6000和10000等几种。
-24-
第一章 旋转变压器
二、旋转变压器的误差和精度 1. 旋转变压器的误差种类
(1) 函数误差。 函数误差是评价正余弦旋转变压器 性能的主要指标, 它是指旋转变压器励磁绕组加上额 定电压,补偿绕组短路时, 在不同的转子转角下,两 个输出绕组实际输出特性和理想输出特性间的最大差 值与理论上输出电压的最大值的百分比,其误差范围 一般为0.02% ~0.1% 。函数误差直接影响作为解算 元件的解算精度。
-3-
第一章 旋转变压器
第一节 正余弦旋转变压器
一、基本结构
S1 励磁绕组 R1
R3
D
U1
S3
S4
补偿绕组
余弦输出绕组
S2 (a)
R4 正弦输出绕组 R2
(b)
图1-1 旋转变压器的绕组结构
(a) 定子绕组 (b) 转子绕组
-4-
第一章 旋转变压器
二、工作原理 1. 空载运行分析
励磁电压
U () E ksikn (k1 ,3 ,5, ) (1-11)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:本文简要介绍编码器、旋转变压器应用特点和接口方法,其中重点介绍产品通信协议和硬件接口电路以及专用的接收芯片AU5561应用方法。
编码器发展历史
早期的编码器主要是旋转变压器,旋转变压器IP值高,能在一些比较恶劣的环境条件下工作,虽然因为对电磁干扰敏感以及解码复杂等缺点而逐渐退出,但是时至今日,仍然有其特有的价值,比如作为混合动力汽车的速度反馈,几乎是不可代替的,此外在环境恶劣的钢铁行业、水利水电行业,旋转变压器因为其防护等级高同样获得了广泛的应用。
随着半导体技术的发展,后来便有霍尔传感器和光电编码器,霍尔传感器精度不高但价格便宜,而且不能耐高温,只适合用在一些低端场合,光电编码器正是由于克服了前面两种编码器的缺点而产生,它精度高,抗干扰能力强,接口简单使用方便因而获得了最广泛的应用。
编码器的生产厂家很多,这里以多摩川的产品为例进行介绍。
下面以旋转变压器、增量式编码器、绝对式编码器为例逐一进行介绍。
旋转变压器
简称旋变是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
旋转变压器解码
图4旋转变压器电气示意图。
旋变的输入输出电压之间的具体函数关系如下所示:
设转子转动角度为θ,初级线圈电压(即励磁电压):ER1-R2=E*Sin2πft
f:励磁频率,E:信号幅度
那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ
K:传输比, θ:转子偏离原点的角度
令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图5所示,
图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。
不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。
只需达到一定的电压数值即可,一般来讲3V~1.2倍额定电压都可满足解码需求。
多摩川为自己的旋变开发了专门的解码芯片AU6802N1,并且艾而特公司有现成的解码板可供使用,解码板支持10KHZ励磁频率,0.5的传输比,可以同时提供增量式和绝对式信号输出,增量式输出
1024C/T,采用长线输出;绝对式输出12位/T,输出采用光电隔离,必要时可以根据客户需要调整。
转换后的信号和编码器无异。
使用旋变解码板时一般要注意3个参数:传输比,励磁电压,励磁频率。
传输比是指输出电压和输入电压的比值,励磁电压就是初级绕组的输入电压,就多摩川的旋转变压器来说,允许励磁电压可以从3V 到1.2倍额定电压。
这3个参数需要完全匹配才能正常解码。
图5
增量式编码器
每转过一个单位,编码器就输出一个脉冲,故称之为增量式;
多摩川的增量式编码器输出信号有长线输出,开集输出,电压输出,推拉互补输出四种方式。
机械结构上分的话有中空轴和带轴编码器,可以满足各种不同的应用场合。
多摩川编码器型号众多,目前主要用在电梯曳引机、门机、伺服马达、数控设备等行业。
绝对式编码器
以某一点为参考原点,数据线始终输出编码器轴的当前位置偏离原点的距离的数据信息,是称绝对式编码器。
比如,一款10位BCD码输出的编码器分辨率为360C/T,那么每个单位对应1°,如果轴偏离原点一个单位,也就是处在1°的位置,那么输出0000000001,如果偏离50°,也就是在50°的位置,那么输出就是0001010000。
绝对式编码器总是输出当前位置信息。
由于这样的特点,绝对式编码器非常适合应用在跑轨迹的场合。
多摩川绝对式编码器型号齐全,从输出信号的编码方式来分类的话,有BCD码、GRAY码和纯2进制码(PB)输出;从输出方式来划分的话并行输出和串行输出;从分辨率来划分的话有从8位到36位不等。
用户可以根据自己的需要进行选择。
此外绝对式编码器还有单回转和多回转之分,多回转计圈数而单回转不计圈数,多摩川绝对式编码器单回转最多可以作到20位,多回转16位。
输出信号采用串行传送,经专用芯片转换后变为并行输出信号,可以直接送给DSP、MCU、FPGA等进行处理。
输出电路接口
对于分辨率不是很高的绝对式编码器来讲,一般适合采用并行输出,这样接口电路简单,而且通信速率高。
采用并行输出的编码器输出回路主要有集电极开路(如图1所示)和射极跟随(如图2示)两种方式。
集电极开路输出模式用户端需要加接上拉电阻,如图1中虚线所示;射极跟随模式下,则应加下拉电阻,
如图2中虚线所示。
输出数据线对应从1、2、22…2?的数据位,用户只需从数据总线直接读取编码器数据即可。
图4
图5所示是另一款转换芯片AU5688转换芯片的时针电路,R1为1MΩ,C1、C2为10PF,晶振频率8M。
该型编码器采用26LS31芯片作为输出级,因此在用户端的解码板上需要采用和26LS31对应的芯片,比如26LS32作为与转换芯片的中间接口电路。
芯片共可输出16位数据线,低12位是单回转,高4位
是多回转。
用户可以从用户数据总线上读取编码器数据。
采用该电路,波特率为2.5MB/S。
图5
图6是TS5643N50等编码器和转换芯片之间的接口电路。
用户可以通过自己的CPU等控制器下发请
求信号,编码器的输出数据通过26LS32送解码芯片转换后再经过AU5688转换为并行输出的数据,供
用户读取。
图6
图7是TS5643N353等编码器和转换芯片之间的接口电路。
编码器信号的进出都经过AU5688芯片,输出数据都是16位,12位单回转,4位多回转。
图7
此外,在通讯协议上,多摩川提供了比较完备的接口协议和用户通讯,具体内容不在此一一介绍,有兴趣的读者朋友可以来电索取资料或咨询。
绝对式编码器应用特点
旋转增量式编码器转动时输出脉冲,通过CPU计数来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。
这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,否则计数设备记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有报错后才能知道。
比如,打印机扫描仪的定位就是用的增量式编码器原理,每次开机,我们都能听到传动马达响声,这就是CPU在找参考零点,然后才工作。
这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。
绝对编码器由机械位置决定的每个位置的唯一性,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道马达位置,什么时候就去读取它的位置,不需要象增量式编码器那样去计算。
甚至编码器带有备用电池这样,断电后编码器也能记忆断电前的位置信息,大大的提高了使用绝对式编码器的安全性和可靠性。
由于绝对编码器在定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。
其中最主要的就是应用在高精度的数控机床和伺服系统里面。
在西方比较发达的国家,运动控制比较侧重于轨迹控制,如果采用绝对式编码器无疑将为控制提供更方便的位置信息。
目前,多摩川已经推出最高达到36位的绝对式编码器,其中单回转20位,多回转16位。
最大响应频率可以达到52MHZ。
可以真正实现高速高精度实时控制。
此外,在有些大功率的伺服马达上,由于初始化时用普通增量式编码器测位置误差较大,所以适合用绝对值加增量式编码器找磁极位置角,这样可以大大的提高其输出力矩,目前多摩川也已经推出混合式编码器。
其增量式输出A、B、Z三相,绝对植输出24位,11单回转,13位多回转,能极大的提高伺服马达初始化时的定位精度。
同时对位置控制和速度计算也都极为方便。