三坐标测量技术规范.doc
三坐标测量机操作规范标准[详]
![三坐标测量机操作规范标准[详]](https://img.taocdn.com/s3/m/765c346ba58da0116d174921.png)
三坐标测量仪操作规1 围本操作规规定了三坐标测量的准备、测量机的操作步骤、注意事项及维护保养的要求。
本操作规适用于公司三坐标测量机的操作。
2 规性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改)适用于本文件。
GB/T 16857.1:2002 产品几何量技术规(GPS) 词汇3 术语和定义3.1 三坐标测量机通过运转探测系统测量工件表面空间坐标的测量系统。
(源自GB/T 16857.1:2002,2.1)3.2 EHSEHS是环境 Environment、健康Health、安全Safety的缩写。
4 职责4.1 三坐标技术员负责测量程序的编辑,操作员的测量培训, 仪器的使用与维护保养,备品备件的申请、选型。
4.2 操作员负责测量程序的编辑,仪器的使用与维护保养,备品备件工装的申请、选型。
4.3 计量员负责仪器的周期校准工作。
5 过程描述5.1 测量前准备5.1.1 开机前应用蘸有无水乙醇的无尘布擦拭机器导轨,导轨擦拭禁用任何性质的油脂。
本标准文件为上海万泽精密铸造有限公司所有,内部使用,拥有著作权及法律规定的任何权益。
未经授权,任何个人或组织均不得以任何方式发行、披露或使用,否则其行为将受到法律许可范围内的起诉。
1 / 15.1.2 开机前检查是否有阻碍机器运行的障碍物。
5.1.3 零件检测时应满足下列环境要求:1) 室温度:20℃±2℃;2) 相对湿度:35﹪~75﹪;3) 气压要求:大于0.45Mpa,小于0.75Mpa。
5.1.4 检查空压气管是否接好,气管是否漏气。
气压低于规定值时,不准操作,否则会严重损坏机器。
5.1.5 被测零件在检测之前,应先清洗去毛刺,防止在加工完成后零件表面残留的冷却液及加工残留物影响测量机的测量精度及测头的使用寿命。
被测零件在测量之前应在室恒温,如果温度相差过大就会影响测量精度。
完整版三坐标测量机验收标准

Easson完善服務質量方針:品質第一,創新技術,一流人才三坐标测量机验收标准三坐依据中华人民共和国国家计量技术规范(JJF1064-2000 标测量机校准规范)一、校准条件长度测量标准器:“经校准的量块”12环境条件 1).设备应安装于避光、避潮、避震及无尘恒温室内;( 2).不受腐蚀性气体、可燃气体、油雾和微粒侵袭。
(UPS欧姆,并标配500W V,50Hz,可靠接地,接地电阻小于4(3).外接电源220稳压电源。
/h 1℃1℃/m ,温度变化(4).温度要求:温度(20±2)℃,温度梯度,5).湿度要求:湿度30%-65% (0.4 MPa - 0.5 Mpa供气压力:(6).120 L/min–(7).供气流量:100 L/min环境条件的测量3实验室环境温度应有记录。
校准时需检查至当日的一周温度记录。
测量点应不测量过程中应测量和记录三坐标测量机的温度变化和温度梯度的情况。
点,分布在不同方向和不同高度。
少于4 二、计量性能要求:=)长度测量最大允许示值误差(MPEE3+L/300±( 1.(A+L/K) ±即MPEE =,由坐标测量机制造商提供或由用户根据需要确定;常数项,?m式中:A——mm; L——被测长度,——无量纲常数,由坐标测量机制造商提供或由用户根据需要确定;K,由坐标测量机制造商提供或由用户根据需要?m B——MPEE 的最大值,确定。
三、长度测量重复精度依据中华人民共和国国家计量技术规范长度测量的重复度必须尊循:人、机、料、法、环;(即同一工件、同点、同位、同方法及同力度)否则影像测量精度;Easson完善服務質量方針:品質第一,創新技術,一流人才轴方向1.X2.Y轴方向Easson完善服務質量方針:品質第一,創新技術,一流人才轴方向3.Z四、探测误差探针位置——按制造商限定范围任意配置,一般用20mm的测杆。
校准过程——在标准球上选取9个探测点进行探测,探测点须均布。
蔡司三坐标教程

坐标系建立与校准
选择合适的测头
根据测量需求选择合适的测头, 并进行测头校准,确保测量精度。
建立坐标系
在测量空间中建立合适的坐标系, 通常选择工件上的三个基准点进
行定位。
校准坐标系
使用标准件对建立的坐标系进行 校准,确保坐标系的准确性和稳
定性。
工件装夹与定位
选择合适的装夹方式
根据工件的形状和尺寸选择合适的装夹方式,确保工件在测量过 程中的稳定性和准确性。
接触式测量的优点
测量精度高,稳定性好。
接触式测量的缺点
测头易磨损,测量速度较慢。
非接触式测量原理
光学测量
利用光学原理,如激光干涉、影 像处理等,对工件表面进行测量。
气动测量
通过空气喷嘴与工件表面的距离 变化,测量工件尺寸。
非接触式测量的优点
无需接触工件,无磨损问题,测 量速度快。
非接触式测量的缺点
原理
蔡司三坐标测量机采用测头接触或非接触方式,通过测量被测物体表面点的三 维坐标值,经过计算机数据处理,实现对物体几何形状、尺寸和位置的全面评 价。
发展历程及现状
初始阶段
20世纪初,三维坐标测量技术开始萌芽。
发展阶段
20世纪中后期,随着计算机技术的进步,三维坐标测量技术得到快速 发展。
成熟阶段
21世纪初至今,蔡司三坐标测量机在精度、速度和自动化程度等方面 取得显著进步。
测量软件
提供全面的测量功能,包括几何元素 测量、形位公差评定、逆向工程等, 支持多种CAD数据格式导入和导出。
03 蔡司三坐标测量原理及方法
接触式测量原理
01
02
03
04
触发式测量
通过测头与工件表面接触,产 生触发信号,记录当前坐标值。
三坐标检测规范

4测量步骤
4.1 按仪器操作说明书的开机步骤进行:打开总电源→打开压缩空气→打开三坐标测量机的控制箱→打开计算机显示屏→接通打印机→进入PCDMIS操作系统→进入应用软件→机器回零。
4.6通过已测特征构造新特征,依次点击插入-特征-构造直线对话框,选择须建立的目标特征,选择二维选项,点应用按钮,机器会用最有效的方法创建一条直线。其它新特征按同样方法调出相应的对话框进行构建。
4.7创建坐标系,该过程设置坐标原点并定义X,Y,Z轴,在工具栏点相应图标进入PC-DMIS 3-2-1法建坐标系,坐标系所选平面和直线必须有较高的精度。
Q/JAY0.XX-XXXX
三坐标测Байду номын сангаас机检测规范
共XX张
1范围
本规范规定了公司使用的三坐标标测量机操作方法及注意事项。
本规范适用于PC-DMIS三坐标测量机。
2测量的技术保障条件
2.1 熟悉产品零件图、工艺要求和相关的技术文件以及产品的精度验收标准,分析产品结构,了解零件装配关系和技术要求,为测量做好必要的技术准备。
2.2 测量环境的要求:测量室内环境的温度、湿度、防尘等必须符合相应的规定,保证测量温度在20°±2°、湿度在40%~70%之间。
2.3 测量零件的要求:零件在测量前必须用汽油清洗干净,无毛刺、外观无明显缺陷、无锈蚀情况。
2.4 测量前按照图纸工艺要求,明确测量的项目,做相应的一些技术准备。
3 测量原理
4.8尺寸评价,访问插入-尺寸-位置度打开位置对话框,从列表框中选择测量的相应特征标识,点击创建按钮。其它尺寸评价以同样的方法打开相应的对话框进行创建。
三坐标测量机校准规范介绍
提高产品质量
高精度的三坐标测量机是保证产品质量的关键因素之一,通过校准规范对设备进 行校准,可以确保产品在制造过程中得到准确的测量,从而提高产品的合格率。
校准规范有助于企业建立完善的质量管理体系,确保产品质量的稳定性和可靠性 ,增强企业的市场竞争力。
结果评估与反馈
对校准结果进行评估,确定三坐标测量机的 性能状态,并根据评估结果提出相应的改进 建议和措施。
05
三坐标测量机校准中的常见 问题及解决方案
设备故障排除
总结词
设备故障排除是校准过程中的重要环节,针对不同类型的故障采取相应的措施,确保设 备正常运行。
详细描述
三坐标测量机在使用过程中可能会出现各种故障,如传感器故障、电气系统故障、机械 系统故障等。针对不同类型的故障,校准人员需要具备相应的专业知识和技能,能够准 确判断故障原因,并采取相应的措施进行修复。在故障排除过程中,应遵循安全操作规
远程校准技术可以降低校准成本和时间,提高校准的准确性和可靠性,同时还可以实现跨地区、跨行 业的校准服务,是未来校准行业发展的重要趋势。
THANKS
延长设备使用寿命
三坐标测量机的使用寿命与其维护和保养密切相关,而校 准规范是设备保养的重要环节之一。通过定期校准,可以 及时发现设备潜在的问题和故障,避免因设备损坏而导致 停机和维护成本的增加。
校准规范通常包括设备使用和维护的建议和指导,有助于 操作人员正确使用和维护设备,延长其使用寿命。
03
三坐标测量机校准规范内容
将校准工具按照要求安装在三坐标测量机上。
运行校准程序
根据校准计划运行相应的校准程序,进行各项参 数的校准。
三坐标测量机校准规范

8、校准项目和校准方法 8.1 .2 使用量块进行长度测量示值误差校准
(如下图所示)
Z
Y X
A. 探针——在制造商规定范围内任意配置 B. 标准器的方位——7个不同方位,至少包含四个空间对角线方向。 C. 量块数及长度的选择——每个方位用五块量块,最大长度不小于测量空间对角线长度的66%;最小长度
3、术语和定义
3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 坐标测量机 坐标测量机的校准 坐标测量机的示值误差 坐标测量机的测量方案 坐标测量机面向任务的校准 长度实物标准器 坐标测量机长度测量的示值误差 坐标测量机轴向长度测量示值误差 探测误差
4、概述 5、计量性能要求 5.1 长度测量最大允许示值误差(MPEE):
699.9992 499.9991 400.0005 200.0000 30.0007 499.9994 400.0025 300.0010 200.0016 30.0003 499.9982 399.9994 299.9980 199.9993 30.0008 700.0008 499.9986 400.0005 200.0003 30.0011 700.0000 499.9979 400.0005 199.9999 30.0014 700.0026 499.9993 400.0006 200.0004 29.9997 700.0015 499.9991 400.0025 200.0016 30.0014
二、六项国际标准
• • • • • ISO/TR 10360—1:1994 《坐标计量学—第1部分:定义,基本几何原则的 应用》 ISO/10360—2:1994 《坐标计量学—第2部分:坐标测量机(CMM)的性 能评定》 ISO/DIS 10360—3:1994 《坐标计量学—第3部分:回转轴为第四坐标的 坐标测量机的性能评定》 ISO/CD 10360—4:1995 《坐标计量学—第4部分:扫描型坐标测量机的性 能评定》 ISO/CD 10360—5:1995 《坐标计量学—第5部分:具有复合多测头探测系 统坐标测量机的性能评定》 ISO/CD 10360—6:1995 《坐标计量学—第6部分:坐标测量几何要素评定 软件的检验一致性》
三坐标测量机技术协议

三坐标测量机技术协议4.设备型号、规格4.1 型号:global advantage 12.15.10 三坐标测量机4.2外形尺寸:1838mm×2880mm×3431mm4.3测量有效行程范围:X轴=1200mmY轴=1500mmZ轴=1000mm4.4工作台最大承载:1800 Kg4.5主机重量:3792 Kg5.设备主要技术指标5.1光栅尺分辨率:0.039μm5.2 测头系统5.2.1测座:Renishaw PH10MQ分度角A(俯仰):0°—105° 步距7.5°分度角B(旋转):±180° 步距7.5°定位重复性:0.5μm重量580g5.2.2测头:Renishaw SP25M扫描/触发套装组中1×(A-2237-1002)SM25-2 扫描模块组1×(A-2237-1003)SM25-3 扫描模块组1×(A-2237-1200)TM25-20 TTP吸盘适配器1×(A-1371-0270)TP20 标准力吸盘PI200测头控制器5.3 测头更换架英国Renishaw 配合MRS单元FCR25六工位柔性更换架。
配置PC-DIMS Tip Changer 测头更换单元软件(美国Wilcox)保证换针的准确可靠。
该系统包括:MRS单元(400mm):1×400mm横杆,2×支座,4×125mm长立柱,2×背板适配器,2×支坐适配器。
(2套)FCR25柔性更换架:1×FCR25,3×PA25-SH,3×PA25-205.4精度【单位:MPE(μm)、L(mm)、τ(s)】5.4.1 长度测量最大允许示值误差MPE E:≤2.1+3L/1000;5.4.2 最大允许探测误差MPE P:≤1.8;5.4.3 最大允许扫描探测误差MPE THP/τ:≤3.0/68;5.4.4动态性能:3D运动精度(mm/s):8663D运动加速度(mm/s2):13005.5标准校验球:直径φ25mm圆度≤0.1μm材料陶瓷5.6计算机系统5.6.1 品牌:惠普Compaq6080pro计算机5.6.2 计算机CPU:双核3.0Ghz / 内存4GB / 显卡512MB;硬盘:250GB以上,DVD-CDRW光驱;鼠标、键盘、24寸彩色液晶显示器;界面操作支持WINDOWS XP及WINDOWS 7;电脑桌椅一套。
三坐标测量机综合误差测量不确定度
坐标测量机长度测量示值误差不确定度分析1 测量方法依据坐标测量机校准技术规范JJF1064-2000, 坐标测量机的长度测量示值误差是采用量块进行校准, 一般要沿X 轴、Y 轴、Z 轴三个方向和空间四个对角线方向放置量块。
将量块的实际长度与坐标测量机所测的结果进行比较,从而得到坐标测量机的长度测量示值误差。
由于坐标测量机测量空间不同点的测量不确定度不同,不同的测量方案对测量结果的不确定度也有不同的影响,本文讨论坐标测量机自动测量沿空间对角线放置量块的不确定度,并以标称长度为100 mm 和1000 mm 的量块为例估算不确定度,最后得到与标称长度L 有关的扩展不确定度。
2 数学模型δ=R -L (1)式中:δ──坐标测量机的长度测量示值误差; R ──坐标测量机测量量块的读数; L ──对应的量块实际长度。
3 方差和灵敏系数 依:)(][)(222k k m1k c x u x f/y u ∂∂=∑=由式(1)有)()()()()(222222L u L C R u R C u u c c ⋅+⋅=δ=式中C (R )=R ∂δ∂/=1C(L)=L ∂δ∂/-1则 )()(222L u R u u c += (2)由长度测量示值误差的数学模型,根据不确定度的传播公式得到长度测量示值误差的标准不确定度是由坐标测量机读数引起不确定度分量u (R )和量块引起不确定度分量u (L )两大部分组成。
4 不确定度的来源及估算4.1 坐标测量机读数引起不确定度分量u (R )坐标测量机读数引起不确定度主要是坐标测量机的测量重复性。
为了获得测量机沿空间测量的重复性,可将长度为20 mm 的量块沿空间对角线放置,编制测量机检测编程,让测量机自动重复测量该量块10次,得到一组测量误差 x 1,x 2,…,x 10如下表1,按式(3)得到实验标准偏差s, 则u (R )可由式(4)求得。
表1测序 1 2 3 4 5 6 7 8 9 10 误差(μm ) +1.0 +1.3 +1.4 +1.3 +1.6 +1.6 +1.6 +1.4 +1.5 +1.319.0)101(911011012=-=∑∑==i i ii x x s μm (3)u (R )= s (4)4.2 量块引起不确定度分量u (L )4.2.1 由检定量块不确定度引入的不确定度分量u (L 1)首先要根据被校准的坐标测量机最大允许示值误差 MPE E 选择采用量块的等级, 一般来说检定量块不确定度应不超过(MPE E /4)。
三座标测量结果不确定度评定-2014-4-10
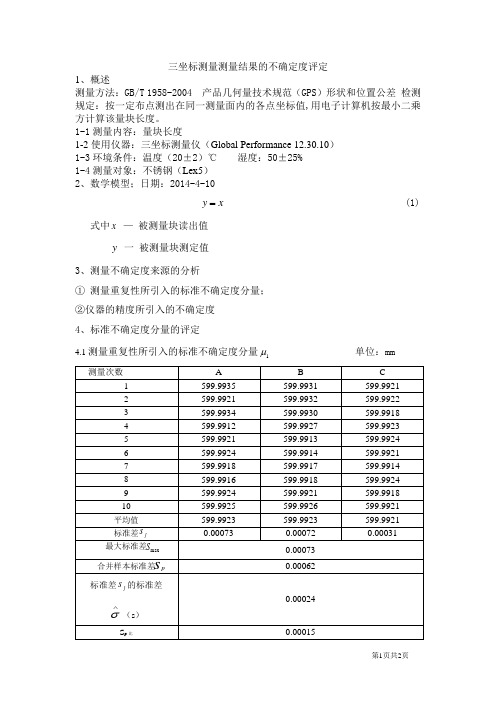
三坐标测量测量结果的不确定度评定1、概述测量方法:GB/T 1958-2004 产品几何量技术规范(GPS)形状和位置公差检测规定:按一定布点测出在同一测量面内的各点坐标值,用电子计算机按最小二乘方计算该量块长度。
1-1测量内容:量块长度1-2使用仪器:三坐标测量仪(Global Performance 12.30.10)1-3环境条件:温度(20±2)℃湿度:50±25%1-4测量对象:不锈钢(Lex5)2、数学模型;日期:2014-4-10y= (1)x式中x—被测量块读出值y一被测量块测定值3、测量不确定度来源的分析①测量重复性所引入的标准不确定度分量;②仪器的精度所引入的不确定度4、标准不确定度分量的评定μ单位:mm4.1测量重复性所引入的标准不确定度分量1合并样本标准差为:∑==mj p s s j m 121 =0.62μm (其中m=3)标准差j s 的标准差:1)(12)(-=∑-=∧m j s m j s s σ=0.24μm)1(2-=n S spP 比=0.15μm (其中n=10)如≤∧)(s σ S p 比,则可采用合并样本标准差Sp 来评定标准不确定度分量,反之,若子 )(s ∧σ>S p 比,则应采用Sj 中的最大值S max 来评定标准不确定度分量。
所以,1u =10/73.0=0.23μm自由度:)1(-=n m pν=)110(*3-=274.2仪器的精度所引入的不确定度2u仪器的示值误差为±2.8+3L/1000m μ按均匀分布 k=3 a=2.8+3*600/1000m μ(L 取值600mm)2u =66.23/≈a m μ2221μμ+=U =2266.223.0+=2.75m μ5.扩展不确定度取置信概率P=95%,, k 95=2 扩展不确定度U 95为U 95=k 95)(e U c ⨯=2⨯2.75≈5.51m μ 6.测量结果不确定度报告与表示三坐标测量该量块的长度为599.9922±0.00551mm报告审核: 报告编制:邓过房。
三坐标测量机校准装置建标技术要求及测量结果的不确定度评定

三坐标测量机校准装置建标技术要求及测量结果的不确定度评定文章摘要:随着经济建设的发展及外资企业的进入,三坐标测量机在许多三资企业、国有大中型企业及汽车零部件制造企业相继得到引进应用。
国内一些企业也生产各种不同精度、不同规格的三坐标测量机。
由于该种类型仪器的精度需要进行有效的实施监测,确保量值传递的准确性,才能使其在生产中发挥应有的作用,为此建立三坐标测量机校准装置是十分必要的。
关键词:三坐标测量机校准测量结果不确定度评定文章正文:三坐标测量机是现代精密加工中必不可少的精密测量设备,它不但可以完成常规二维坐标的测量,重要的是由于它的产生使得三维曲面的精确测量成为可能,特别是对复杂空间位置、空间曲面的测量不但可以成为可能,而且还可以通过CAD、CAM、CNC系统直接对加工机床进行加工过程的指导性控制。
由于它具有高精密度及由计算机系统控制的智能功能,因此被广泛应用于汽车、摩托车、航空航天、飞机制造及模具制造等加工业。
一、三坐标测量机校准装置计量标准的工作原理及其组成,根据JJF1064-2010《坐标测量机校准规范》,三坐标测量机示值误差校准方法和综合示值误差校准方法与原理如下:1、示值误差校准方法:按照JJF1064-2010的要求,采用激光干涉仪对三坐标测量机每一个坐标进行单独校准,并且要求在正、反行程方向进行校准。
原理如图1所示。
一、2、综合示值误差校准方法及原理:(1)单轴坐标综合示值误差的校准,将量块借助支撑架固定在平行于坐标轴线的任意位置,同时是处于工作行程的中间部位,原理如图2所示。
(2)空间综合示值误差的校准,将量块借助支撑架固定在三坐标测量机空间对角线方位的中间部位,这一检定分别在四个对角线进行,原理如如图3所示。
3、计量标准的组成:(1)激光干涉仪;(2)量块;(3)标准球。
二、三坐标测量机校准装置计量标准的主要技术指标1、激光干涉仪规格:XL-80测量范围:(0~80000)mmMPE:±(0.03+0.5L)μm2、量块(1)规格:30 mm、125mm、250mm、500mm、600mm、700mm、1000mm测量范围:(30~1000)mm等级:二等(2)规格:大八块测量范围:(125~500)mm等级:三等(3)规格:大五块测量范围:(600~1000)mm等级:三等3、标准球规格:Φ25mm、Φ19mm三、测量结果的不确定度评定1 概述1.1 测量方法:依据JJF1064-2010《坐标测量机校准规范》。
(完整版)三坐标测量机验收标准

質量方針:品質第一,創新技術,一流人才完善服務三坐标测量机验收标准依据中华人民共和国国家计量技术规范(JJF1064-2000三坐标测量机校准规范)一、校准条件1 长度测量标准器:“经校准的量块”2环境条件(1).设备应安装于避光、避潮、避震及无尘恒温室内;(2).不受腐蚀性气体、可燃气体、油雾和微粒侵袭。
(3).外接电源220 V,50Hz,可靠接地,接地电阻小于4欧姆,并标配500W UPS 稳压电源。
(4).温度要求:温度(20±2)℃,温度梯度1℃/m ,温度变化 1℃/h(5).湿度要求:湿度30%-65% ,(6). 供气压力:0.4 MPa - 0.5 Mpa(7).供气流量:100 L/min – 120 L/min3 环境条件的测量实验室环境温度应有记录。
校准时需检查至当日的一周温度记录。
测量过程中应测量和记录三坐标测量机的温度变化和温度梯度的情况。
测量点应不少于4点,分布在不同方向和不同高度。
二、计量性能要求1. 长度测量最大允许示值误差(MPEE=±(3+L/300):即MPEE = ±(A+L/K)式中:A——常数项,μm,由坐标测量机制造商提供或由用户根据需要确定;L——被测长度,mm;K——无量纲常数,由坐标测量机制造商提供或由用户根据需要确定;B——MPEE 的最大值,μm,由坐标测量机制造商提供或由用户根据需要确定。
三、长度测量重复精度依据中华人民共和国国家计量技术规范长度测量的重复度必须尊循:人、机、料、法、环;(即同一工件、同点、同位、同方法及同力度)否则影像测量精度;質量方針:品質第一,創新技術,一流人才完善服務2.Y轴方向質量方針:品質第一,創新技術,一流人才完善服務3.Z轴方向四、探测误差探针位置——按制造商限定范围任意配置,一般用20mm的测杆。
校准过程——在标准球上选取9个探测点进行探测,探测点须均布。
探测点建议:极点上一点;极点下45 º点均布;极点下90 º点均布。
三坐标测量机操作规范

三坐标测量机操作规范三坐标测量仪操作规范1 范围本操作规范规定了三坐标测量的准备、测量机的操作步骤、注意事项及维护保养的要求。
本操作规范适用于公司三坐标测量机的操作。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改)适用于本文件。
GB/T 16857.1:2002 产品几何量技术规范(GPS) 词汇3 术语和定义3.1 三坐标测量机本标准文件为上海万泽精密铸造有限公司所有,内部使用,拥有著作权及法律规定的任何权益。
未经授权,任何个人或组Casting版本号:A 修订日期:2018-06-28替代文件:首次发布上级文件xxxxxx编制:xxxx审核:批准:标准化发布:本标准文件为上海万泽精密铸造有限公司所有,内部使用,拥有著作权及法律规定的任何权益。
未经授权,任何个人或组轨,导轨擦拭禁用任何性质的油脂。
5.1.2开机前检查是否有阻碍机器运行的障碍物。
5.1.3零件检测时应满足下列环境要求:1) 室内温度:20℃±2℃;2) 相对湿度:35﹪~75﹪;3) 气压要求:大于0.45Mpa,小于0.75Mpa。
5.1.4检查空压气管是否接好,气管是否漏气。
气压低于规定值时,不准操作,否则会严重损坏机器。
5.1.5 被测零件在检测之前,应先清洗去毛刺,防止在加工完成后零件表面残留的冷却液及加工残留物影响测量机的测量精度及测头的使用寿命。
被测零件在测量之前应在室内恒温,如果温度相差过大就会影响测量精度。
根据零件的大小、材料、结构及精度等特点,适当选择恒温时间,以适应测量仪室内温度,减少冷热对零件尺寸的影响。
5.1.6 设备确认性能完好方可作业。
5.2 三坐标测量仪的操作本标准文件为上海万泽精密铸造有限公司所有,内部使用,拥有著作权及法律规定的任何权益。
未经授权,任何个人或组5.2.1开机操作:A. 接通系统总电源;B. 接通控制系统电源;C. 首先将空压气管开关打开;D. 待气压正常后,先打开控制柜然后打开计算机电源开关;E. 启动PC-DMIS软件,打开操作盒上的急停按钮;F. 按软件提示进行”回零”。
检具技术规范草稿

检具技术规范(第一版)一、线检测及用于三坐标测量。
二、设计及制造依据:1.产品图纸,数学模型(CAD数据::光盘CATIA的MODEL格式)作为检具的设计基准。
2.检具能够根据有效的产品图和CAD数据来合理的测量零件的所有参数,借助于三坐标测量机能对检具进行校验及鉴定。
3.在正常的使用频率和良好的保养维护情况下,应保证检具的使用寿命为10年以上。
三、检具的精度要求(公差):1.基座:平行度≤0.05mm/m垂直度≤0.05mm/m2.定位基准孔,位置度≤±0.05mm3.一般孔位置精度≤±0.1mm4.“3”位面精度≤±0.15mm5.“1”位面精度≤±0.20mm6.“0”位面精度(基准面)≤±0.1mm“0”位面精度(边缘轮廓)≤±0.15mm7.坐标网格线精度≤±0.2mm/m8.样规检测面精度≤±0.1mm9.在检具适当位置精加工三个Φ10三坐标测量基准孔,位置精度≤±0.05mm,同时用标牌标出该基准孔的车身坐标值。
四、检具的制造规格1.检具为轻质钢管骨架焊接结构,并对质量负责。
构造的骨架必须有足够的强度和刚度,选择外径为20mm壁后 1.5mm (GB/T13793-92)的直缝电焊钢管材料20钢,并采取消除应力措施。
2.检具的型面(分段)与零件均匀间隙3mm,材料为树脂。
型面厚度为20—25mm,成型后必须经过时效处理,表面硬度必须达到肖氏硬度(Shore D hardness)80—83型面与钢管骨架间用螺丝联接,支撑台为3mm厚铁质与工件接触。
3.检具需制作一个标准检测基座,材质为A3钢,板厚为20mm,检具与机座之间用M10螺栓和销钉连接,便于检具的加工和检测。
4.检具的基准及坐标线检具的机座上必须设置四个Φ10H7基准孔,坐标为车身坐标,基准孔间距为200毫米的倍数。
同时检具上应划出整百坐标线,并在侧面做出标注。
三坐标测量技术规范

三坐标测量技术规范1 测量准备 21.1 基本原则 21.2 测量准备 22 工件装夹 22.1 产品形状的保持 2 2.2 装夹方位 22.3 装夹技巧 23 测量 33.1 测量的内容和次序 3 3.2 基准点组的测量 3 3.3 线的测量 33.4 面的测量 43.5 对称部分的测量 5 3.6 测量密度 53.7 测量可靠性 54 测量数据管理 54.1 数据分类与分割 6 4.2 数据文件命名 64.3 填写测量报告 64.4 数据保存 72 数据处理 72.1 数据转换 72.2 重定位整合 72.2.1 应用背景 72.2.2 重定位整合原理 7 2.2.3 重定位整合操作 9 2.3 对称基准重建 102.4 变形处理 103 设备维护 10附1 :三坐标测量报表 11 1 测量准备1.1 基本原则产品测量遵循以下基本原则:所有零部件应尽可能在装配状态下测量,在装配状态下无法测量的部分可分两种情况处理:一是零件之间互相遮挡的部分,可采取逐层拆卸逐层测量的方法进行。
二是零件的反面,应采用重定位的方法进行。
在拆卸任何零件之前均应测量其重定位基准(重定位基准点或边界线),并注意在拆卸过程中保证产品上的所有零件不发生变形。
1.2 测量准备为了方便测量,提高测量速度,在测量前应对零件上不明显的轮廓(倒圆)进行描点。
点应描在轮廓的中心线上,并尽可能光顺。
可通过观察平行光(日光或日光灯)在轮廓上反射光线形成的条纹来辅助描点。
2 工件装夹2.1 产品形状的保持确保装配体及其每个零件在测量状态下的形状与使用状态下一致,不得使产品在装夹时发生变形。
对于刚性较好的装配体,应在装夹时自然放置在支架上,然后进行加固。
而对于柔性或已经产生变形的工件,则应用强行约束使其形状恢复至使用状态,然后再安装到支架上固定。
应利用支架、垫块等辅助工具保证每一个零件的各部分以及整个装配体的刚性。
特别注意在对装配体逐层拆卸、逐层测量时,应确保每一零件不发生变形。
复合式三坐标测量仪操作规范

复合式三坐标测量仪操作规范1 范围本标准根据本公司的生产实际情况,规定了三坐标测量仪的要求、试验方法、检验规则、标志、包装、运输、贮存等方法和要求.本标准适用于DXC系列三坐标测量仪,包括后续发展的产品。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准。
鼓励根据本标准达成协议的各方研究是否使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版适用于本标准。
GB 4793.1 测量、控制和试验室用电气设备的安全要求第一部分:通用要求(GB4793.1-1995 IEC 1010-1:1990 IDT)GB9969.1 工业产品使用说明书总则(GB-9969.1-1998,ISO/IEC Guide 37,NEQ)GB/T 11162 光学分划零件通用技术条件GB/T 15464 仪器仪表包装通用技术条件GB/T 191 包装运输图示标志(GB/T191-2000 ISO780:1997 EQV)GB/T 18268 测量、控制和实验室的电设备电磁兼容性要求(GB/T18268-2000,IEC61326-1:1997,IDT)JB/T 9329 仪器仪表运输运输贮存基本环境及试验方法JB/T 9338-1999 坐标测量机技术要求GB/T 16857.2-2006/ISO 10360-2:2001 产品几何技术规范(GPS)坐标测量机的验收检测和复检检测第2部分:用于测量尺寸的坐标测量机JJF 1064-2004 坐标测量机校准规范3 仪器型号、基本参数和尺寸3.1 仪器型号仪器型号规按如下规定:仪器行程规格3.2 工作台尺寸:3.2.1 X轴长度及分辨率3.2.2 Y轴长度及分辨率3.2.3 Z轴长度及分辨率3.2.4 测头型号及其参数3.2.5 仪器使用电源参数3.2.6 仪器外置设备参数 (空气干燥机、空压机等、电脑、UPS等等)4. 要求4.1. 仪器外观和结构4.1.1 电镀表面应无有脱皮和斑点存在;4.1.2 漆面不应有油漆脱落和显著的颜色不均匀;4.1.3 零件表面不应有毛刺,外部零件锐边应倒棱;4.1.4 外部零件接合处应平整,无粗糙不平现象;4.1.5 测量机各工作面上,不应有锈鉵、碰伤、显著的划痕以扩影响测量的其他缺陷;4.1.6 光学零件的表面不应有明显的擦痕、麻点、水珠、霉点等疵病,胶合光学零件的胶合面不应有气泡和脱胶现象;4.1.7 测量机所有紧固件应保证固紧可靠;4.1.8 测量机上所有的刻线、刻字应清晰,刻字刻线的技术应符合GB/T 1162的规定。
复合式三坐标测量仪操作规范
复合式三坐标测量仪操作规范1 范围本标准根据本公司的生产实际情况,规定了三坐标测量仪的要求、试验方法、检验规则、标志、包装、运输、贮存等方法和要求.本标准适用于DXC系列三坐标测量仪,包括后续发展的产品。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准。
鼓励根据本标准达成协议的各方研究是否使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版适用于本标准。
GB 4793.1 测量、控制和试验室用电气设备的安全要求第一部分:通用要求(GB4793.1-1995 IEC 1010-1:1990 IDT)GB9969.1 工业产品使用说明书总则(GB-9969.1-1998,ISO/IEC Guide 37,NEQ)GB/T 11162 光学分划零件通用技术条件GB/T 15464 仪器仪表包装通用技术条件GB/T 191 包装运输图示标志(GB/T191-2000 ISO780:1997 EQV)GB/T 18268 测量、控制和实验室的电设备电磁兼容性要求(GB/T18268-2000,IEC61326-1:1997,IDT)JB/T 9329 仪器仪表运输运输贮存基本环境及试验方法JB/T 9338-1999 坐标测量机技术要求GB/T 16857.2-2006/ISO 10360-2:2001 产品几何技术规范(GPS)坐标测量机的验收检测和复检检测第2部分:用于测量尺寸的坐标测量机JJF 1064-2004 坐标测量机校准规范3 仪器型号、基本参数和尺寸3.1 仪器型号仪器型号规按如下规定:仪器行程规格3.2 工作台尺寸:3.2.1 X轴长度及分辨率3.2.2 Y轴长度及分辨率3.2.3 Z轴长度及分辨率3.2.4 测头型号及其参数3.2.5 仪器使用电源参数3.2.6 仪器外置设备参数 (空气干燥机、空压机等、电脑、UPS等等)4. 要求4.1. 仪器外观和结构4.1.1 电镀表面应无有脱皮和斑点存在;4.1.2 漆面不应有油漆脱落和显著的颜色不均匀;4.1.3 零件表面不应有毛刺,外部零件锐边应倒棱;4.1.4 外部零件接合处应平整,无粗糙不平现象;4.1.5 测量机各工作面上,不应有锈鉵、碰伤、显著的划痕以扩影响测量的其他缺陷;4.1.6 光学零件的表面不应有明显的擦痕、麻点、水珠、霉点等疵病,胶合光学零件的胶合面不应有气泡和脱胶现象;4.1.7 测量机所有紧固件应保证固紧可靠;4.1.8 测量机上所有的刻线、刻字应清晰,刻字刻线的技术应符合GB/T 1162的规定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三坐标测量技术规范1 测量准备 21.1 基本原则 21.2 测量准备 22 工件装夹 22.1 产品形状的保持 2 2.2 装夹方位 22.3 装夹技巧 23 测量 33.1 测量的内容和次序 3 3.2 基准点组的测量 3 3.3 线的测量 33.4 面的测量 43.5 对称部分的测量 5 3.6 测量密度 53.7 测量可靠性 54 测量数据管理 54.1 数据分类与分割 6 4.2 数据文件命名 6 4.3 填写测量报告 6 4.4 数据保存 72 数据处理 72.1 数据转换 72.2 重定位整合 72.2.1 应用背景 72.2.2 重定位整合原理 72.2.3 重定位整合操作 92.3 对称基准重建 102.4 变形处理 103 设备维护 10附1 :三坐标测量报表 111 测量准备1.1 基本原则产品测量遵循以下基本原则:所有零部件应尽可能在装配状态下测量,在装配状态下无法测量的部分可分两种情况处理:一是零件之间互相遮挡的部分,可采取逐层拆卸逐层测量的方法进行。
二是零件的反面,应采用重定位的方法进行。
在拆卸任何零件之前均应测量其重定位基准(重定位基准点或边界线),并注意在拆卸过程中保证产品上的所有零件不发生变形。
1.2 测量准备为了方便测量,提高测量速度,在测量前应对零件上不明显的轮廓(倒圆)进行描点。
点应描在轮廓的中心线上,并尽可能光顺。
可通过观察平行光(日光或日光灯)在轮廓上反射光线形成的条纹来辅助描点。
2 工件装夹2.1 产品形状的保持确保装配体及其每个零件在测量状态下的形状与使用状态下一致,不得使产品在装夹时发生变形。
对于刚性较好的装配体,应在装夹时自然放置在支架上,然后进行加固。
而对于柔性或已经产生变形的工件,则应用强行约束使其形状恢复至使用状态,然后再安装到支架上固定。
应利用支架、垫块等辅助工具保证每一个零件的各部分以及整个装配体的刚性。
特别注意在对装配体逐层拆卸、逐层测量时,应确保每一零件不发生变形。
2.2 装夹方位将工件放置在三坐标测量机的测量范围内,如不能在一次装夹位置下完成测量,则可进行多次定位,称为重定位。
重定位应注意以下原则:(1)使每次定位所能达到的测量范围最大化,以减少重定位次数。
(2)每次定位应与之前的某次定位有尽可能大的重合测量区域,以保证定位基准的设置和重定位变换的精度。
(3)应尽可能减少重定位变换(即每次定位向第一次定位进行坐标位变换)的中间环节尽可能少(详见数据处理部分有关“重定位”的叙述),以减少累积误差。
工件的放置应便于测量人员的操作,将复杂部位放置在易于测量的位置。
重要的测量面应尽可能放置成水平或垂直状态,工件的对称面应尽可能平行于测量机的坐标平面。
2.3 装夹技巧(1)采用棉花堆积并浇502的方法可完成点接触的加固。
(2)大变形产品在拆卸前可用麻线绷紧并固定在易于变形的位置,产品拆下后将其恢复至麻线绷紧的状态即可作为对装配状态的近似模拟。
3 测量3.1 测量的内容和次序测量的内容包括基准点、分型(边界)线、轮廓线、面、结构等。
测量的次序按如下原则制订:(1)先难后易:即先测量难度较大的部分。
(2)先重后轻:即先测量重要的部分。
如基准点、分型线等。
(3)先配合后个体:即先测量装配结合部分。
(4)先整体后细节:即先完成主体的形位测量,再补充细节。
当然,在安排次序时,还要结合下面的具体情况灵活处理:(1)造型进度的需要。
(2)在同一次定位下完成尽可能多的数据测量。
(3)测量器具的局限。
如探针在同一方位下可测量尽可能多的数据,以减少探针的换位次数。
3.2 基准点组的测量基准点组由三个基准点组成,是进行重定位变换的依据。
基准点的生成及测量要求如下:(1)基准点必须设定在重复定位后可以测量到的范围内,最好能用于多次重复定位。
用针尖在产品表面(可贴纸)点出,要求点径微小(直径0.2mm以内)并且醒目。
(2)重复测量可靠性和精度要求高,两次定位下的测量重复误差(指三点之间的间距测量重复误差)不超过0.2mm。
为此可以采取多次测量取平均值的方法提高可靠性。
(3)基准点所形成的三角形面积要尽可能大,边长应有明显差异(大于5mm)。
3.3 线的测量当测量人员直接对边界线进行测量时,由于难以将探针尖对准边界线,因此常常造成较大的测量误差,效率也较低。
为此,可采用如下方法改进:在边界线某一侧的面(面1)上、并且在距边界线不远处(1mm 以内)采点(称为边界附近测量点),然后测量边界线另一侧面(面2)的完整数据。
在造型时,先完成面2的制作,然后直接将边界附近测量点投影在面2上即可作为边界线测量结果。
图1中是两个典型情况的示意。
采用这一方法时有两点需要特别注意:一是边界附近测量点一定要在离边界足够近,以保证投影的准确性;二是面2的测量数据一定要完整,否则一旦面2无法制作,则边界线无法求出。
本方法将边界线的测量转化为边界线附近的面内点的测量,避开了对边界线的直接测量,不仅保证的测量精度,还有效提高了测量效率。
(a)(b)图13.4 面的测量平面的测量应使测量点形成的多边形面积尽可能大,以保证测量精度。
曲面的测量应注意使扫描方向与曲面的长度方向垂直如图2(a)。
当曲面长度与宽度基本相同时,应考虑采用网格扫描,如图2(b)。
(a)(b)图2当然,一些简单曲面如直纹面只需要测量上、下两条边界线即可。
对于特殊曲面的测量需要与造型人员协商确定。
3.5 对称部分的测量对称的曲面一般只需要测量一半。
轮廓线和结构除了完整测量其中一半之外,还需要对另外一半进行部分测量,以取得足以进行对称基准重建的数据。
在选择另一半用于对称基准重建的轮廓线进行测量时,应注意以下几点:(1)轮廓线的范围要足够大,最好在对称部分的全范围内分布。
(2)要选择足够清晰、变形小、重要的轮廓线进行测量,一般采用分型线。
(3)轮廓线可以分段测量,测量密度也可适当减小。
3.6 测量密度测量密度应掌握两个基本原则:(1)最少增半:即按需要的最小测量密度的1.5倍进行测量,以确保数据的完备性。
如圆弧线的测量至少需要三点,实际测量4到5个点。
(2)急密缓疏/疏密有致:在曲率较大处测量密度高,曲率较小处测量密度低。
在多个面的交会处、变化较多的细节部分等需要增加密度,以确保测量的完备性。
3.7 测量可靠性确保测量数据准确、数据保存可靠的几个措施:(1)为防止测量设备精度飘移,必须在一定的时间间隔内(建议为半小时)进行零点复校。
如出现零点超差(一般为0.2mm),则该时间间隔内的测量数据全部报废。
(2)同一次零点校验的操作应做两次,并进行对比以防止操作失误。
(3)在多名测量人员进行配合测量时,应按零件、测量属性进行明确的分工,以防止漏测及重复测量。
即使增加了零点校验的次数,总体上还是提高了效率。
(4)重要的工件应制作并测量重定位基准,以备补测数据。
4 测量数据管理2.1 数据转换数据转换的任务和要求:(1)将测量数据格式转化为CAD软件可识别的IGES格式,合并后以产品名称或用户指定的名称分类保存。
(2)不同产品、不同属性、不同定位、易于混淆的数据应存放在不同的文件中,并在IGES文件中分层分色。
数据转换使用《三坐标测量数据处理系统》完成,操作方法见软件用户手册。
2.2 重定位整合2.2.1 应用背景在产品的测绘过程中,往往不能在同一坐标系将产品的几何数据一次测出。
其原因一是产品尺寸超出测量机的行程,二是测量探头不能触及产品的反面,三是在工件拆下后发现数据缺失,需要补测。
这时就需要在不同的定位状态(即不同的坐标系)下测量产品的各个部分,称为产品的重定位测量。
而在造型时则应将这些不同坐标系下的重定位数据变换到同一坐标系中,这个过程称为重定位数据的整合。
对于复杂或较大的模型,测量过程中常需要多次定位测量,最终的测量数据就必需依据一定的转换路径进行多次重定位整合,把各次定位中测得的数据转换成一个公共定位基准下的测量数据。
2.2.2 重定位整合原理工件移动(重定位)后的测量数据与移动前的测量数据存在着移动错位,如果我们在工件上确定一个在重定位前后都能测到的形体(称为重定位基准),那么只要在测量结束后,通过一系列变换使重定位后对该形体的测量结果与重定位前的测量结果重合,即可将重定位后的测量数据整合到重合前的数据中。
重定位基准在重定位整合中起到了纽带的作用,如图4所示。
图4图5给出了因被测量物体的尺寸超出了测量范围而必须进行两次定位的示意。
其中,图5(a)和图5(b)分别为第一次定位和第二次定位的情况。
在被测物体上选取不共线且在两次定位状态下均可测量的三个点A、B和C,称为重定位基准点。
设在第一次定位状态下测得A、B、C的坐标值分别为(x1,y1,z1) 、(x2,y2,z2)和(x3,y3,z3)。
在第二次定位状态下测得的坐标值分别为(X1,Y1,Z1)、(X2,Y2,Z2)和(X3,Y3,Z3)。
由于工件发生过移动,如果不进行重定位整合,直接将两次定位下的测量数据合并,就会产生如图5(c)的结果。
如果我们利用一系列变换,将第二次定位下测量得到的A、B、C三点“拖动”至与第一次定位下的测量结果重合,同时第二次定位下的其它测量数据也跟着进行同样的变换,则可将第二次定位下的测量数据转换到第一次定位下的坐标系中,从而完成两次定位下的数据整合,如图5(d)。
除了利用基准点外,还常常采用基准线进行重定位整合,即在两次定位中分别测量产品上的同一条边界线或轮廓线(称为重定位基准线,如图5中标出的两条粗线段),然后将第二次定位下的测量数据进行一系列变换,使两次定位下的重定位基准线重合,即可将第二次定位测量数据整合到第一次定位中。
(a)第一次定位(b) 第二次定位(c)直接合并的结果(d) 重定位整合的结果图42.2.3 重定位整合操作首先,重定位基准(无论是基准点还是基准线)必须设置在两次定位下都能进行精确测量的位置。
当需要进行两次以上的重定位时,应将所有重定位下的测量数据整合到第一次定位中。
如果在第N次定位与第一次定位之间不能设置重定位基准,则它不能直接与第一次定位进行整合,需要通过另外的定位间接地整合到第一次定位中。
例如,在某次测量中做了5次定位,其中第5次定位与第3次定位之间设置了重定位基准,而第3次定位与第一次定位之间存在重定位基准,则可先将第5次定位下的测量数据整合到第3次定位中,然后再与第3次定位一起整合到第一次定位中。
这一整合过程称为重定位整合路径,简写为5-3-1。
显然,重定位整合路径必须以1为结束,即最终整合到第一次定位中。
而且该路径越短越好,以减少中间过程的累积误差。
这就要求测量人员合理地规划重定位,使每次定位都能以最短的路径整合到第一次定位中。
三个重定位基准点构成一个重定位基准,称为一个重定位基准点组(简称基准点组),并以组号区分不同的基准点组。