点云格式转换
激光点云数据格式标准

激光点云数据格式标准
激光点云数据格式标准是一种将三维空间中的点以坐标形式进行存储的文件格式,用于激光雷达、三维扫描仪等设备采集的数据。
激光点云数据格式标准有多种,其中常见的有ASCII格式和二进制格式。
ASCII格式以文本形式表示点云数据,每个点以一行为单位,包括点的坐标和可能的属性信息,如颜色、反射率等。
这种格式的优点是易于阅读和编辑,但缺点是文件较大,存储和传输效率较低。
二进制格式则将点云数据以二进制形式进行存储,通常使用压缩算法来减小文件大小。
二进制格式的优点是存储和传输效率高,但缺点是不易于阅读和编辑。
在实际应用中,激光点云数据通常会根据不同的应用场景和数据特点选择不同的格式标准。
例如,对于大规模的点云数据,可能会选择使用分块的方式进行存储和传输,以提高处理效率。
同时,随着技术的不断发展,新的激光点云数据格式标准也在不断涌现,如Open3D等开源库提供了多种格式转
换和处理的工具,为激光点云数据的处理和应用提供了更多的选择和便利。
总的来说,激光点云数据格式标准的发展是随着激光雷达、三维扫描仪等设备的普及和技术的不断进步而不断完善的。
未来,随着人工智能、机器学习等技术的进一步发展,激光点云数据格式标准的应用场景将更加广泛和深入,为智能感知、自动驾驶、机器人等领域的发展提供更加有力的技术支持。
点云栅格化;python

点云栅格化;python(最新版)目录1.点云栅格化的概念和意义2.Python 在点云栅格化中的应用3.使用 Python 进行点云栅格化的具体步骤4.总结正文点云栅格化是将三维点云数据转换为二维栅格数据的过程,这样就可以在二维平面上进行处理和分析。
在众多编程语言中,Python 以其丰富的库和易用的语法脱颖而出,成为进行点云栅格化处理的首选工具。
首先,我们需要了解什么是点云。
点云是由大量三维坐标点组成的数据集,它可以用来描述物体或场景的三维结构。
然而,点云数据不便于进行直观的观察和分析,因此需要将其转换为栅格数据。
栅格数据是一种以像素为单位的二维数据结构,可以方便地进行图像处理和分析。
Python 提供了多种库和工具来进行点云栅格化处理。
其中,最为常用的是 CloudCompare 和 PyPIA 库。
CloudCompare 是一款开源的点云处理软件,可以进行点云的编辑、处理和分析。
PyPIA 则是一款基于Python 的点云处理库,提供了丰富的点云处理功能。
下面,我们将详细介绍如何使用 Python 进行点云栅格化的具体步骤。
1.安装 Python 和相关库:首先,需要安装 Python,并导入所需的库,如 CloudCompare 或 PyPIA。
2.读取点云数据:使用 CloudCompare 或 PyPIA 库读取点云数据,将其转换为 Python 数据结构。
3.点云栅格化:根据需求选择合适的栅格化方法,如表面重建、体素重建等。
使用相应的库函数进行栅格化处理。
4.保存栅格数据:将栅格化后的数据保存为常用的栅格数据格式,如GeoTIFF、PNG 等。
5.数据分析和处理:使用 Python 进行栅格数据的分析和处理,如计算表面积、体积等。
点云栅格化是点云数据处理的重要环节,Python 凭借其丰富的库和易用的语法,成为了点云栅格化处理的有力工具。
las点云转换成国家标准格式dem(nsdtf格式)

需要用到两个软件:1. globalmapper(网上都有,有非付费版的),主要是用它来进行插得到标准格网间距的DEM和转换成中间格式ascii2. MapMatrix操作:原始数据必须是.las点云格式1. 打开globalmapper,直接将待转换的.las数据拖入到globalmapper界面中来,会弹出如下对话框:(主要是说没有投影信息,这个可以任意给个投影,其实对它来说没啥用)点击确定,然后随便给个高斯投影就行再点击确定继续确定进来后就是这样的:2. 以上进来的就是离散点模式(不规则三角网模式)需要将他们变成规则格网操作:菜单中的“工具”------“控制中心”,弹出对话框中,选中对应的las文件,右键用3D数据创建格网点确定,即开始转换这种转换纯粹是密集点云抽稀和插,保证每条边的边线长度基本上是上图中“手动指定使用的格网间距”(本例 2米)转换完了后3. 导出中间格式在新转换出的图层上(上图被选中就是)右键,选中“输出--输出选中的图层(s)到新文件”选择输出格式“Arc ASCII GRID"点击确定,弹出对话框意思是用当前投影信息,如果要改变投影信息,则用工具菜单中的配置来设置,我们不需要改变投影,继续点击确定即可,弹出如下对话框在一般设置中设置x和y 方向格网间距即可,点确定,给定输出路径和名称,程序即会输出标准格网间距的 ascii码的高程模型。
globalmapper的使命完成了,可以关掉。
4. 格式转换在这一步要用到mapmatrix打开MapMatrix,点击菜单“工具”中的“DEM转换”工具弹出对话框中点击左上角的打开DEM对话框如上图所示,弹出对话框中,将默认的文件类型改成所有文件(*.*),然后选中刚才导出的ascii文件需要修改格网起算点坐标值如上图。
可以留意一下默认的输出路径(路径可改的,在工具栏上修改)。
点击工具栏上的“执行”按钮(类似于人在跑的那个按钮),即可将ascii码转换成我们国家标准DEM格式,如果需要其他格式的,也可以用此工具转换。
三维点云的数据格式

三维点云的数据格式1. 引言三维点云是由大量离散的三维点构成的集合,可以用来表示真实世界中的物体或场景。
在计算机视觉、机器人技术、虚拟现实等领域,三维点云数据被广泛应用。
为了有效地存储和处理三维点云数据,需要定义一种适合的数据格式。
2. 常见的三维点云数据格式2.1 XYZ 格式XYZ 格式是最简单和最常见的三维点云数据格式之一。
每个点由其 x、y 和 z 坐标值组成,以空格或制表符分隔。
该格式易于理解和解析,但缺乏额外信息。
示例:0.1 0.2 0.30.4 0.5 0.6...2.2 PLY 格式PLY(Polygon File Format)是一种灵活且广泛使用的三维模型文件格式,也可用于表示点云数据。
PLY 格式支持多种属性类型(如颜色、法线等),并允许自定义额外属性。
示例:plyformat ascii 1.0 {文件格式}element vertex N {顶点数量}property float x {x 坐标}property float y {y 坐标}property float z {z 坐标}property uchar red {红色分量}property uchar green {绿色分量}property uchar blue {蓝色分量}end_header0.1 0.2 0.3 255 0 00.4 0.5 0.6 0 255 0...2.3 LAS/LAZ 格式LAS(Lidar Data Exchange Format)是一种用于激光雷达扫描数据的二进制格式,常用于大规模点云数据的存储和交换。
LAZ 是 LAS 的压缩版本,能有效减小文件大小。
LAS/LAZ 格式支持包括位置、强度、分类和时间等多种属性,并具有高度可扩展性和灵活性。
2.4 OBJ 格式OBJ(Wavefront .obj file)是一种广泛用于三维模型的文件格式,也可用于表示点云数据。
OBJ 格式支持顶点坐标、纹理坐标、法线等属性,并允许定义面片拓扑关系。
potree用法

potree用法Potree是一个用于可视化点云数据的开源软件。
它提供了一个基于Web的界面,使用户能够直观地浏览和分析大规模的点云数据集。
Potree采用了最新的Web技术,如HTML5和WebGL,使得用户能够在现代的Web浏览器中无缝地浏览点云数据。
Potree的用法非常简单,只需几步即可完成点云数据的可视化。
首先,用户需要准备点云数据,数据可以来自激光扫描仪、无人机、摄影测量等各种设备。
点云数据一般以XYZ格式存储,每个点由坐标和可能的属性信息组成。
一旦准备好了点云数据,下一步是使用Potree将其转换为可视化的格式。
Potree提供了一个命令行工具,可以将XYZ格式的点云数据转换为Potree格式。
用户只需在终端中运行potree_converter命令并指定输入和输出文件夹即可完成转换。
转换过程可能需要一段时间,具体时间取决于点云数据的大小和复杂度。
转换完成后,用户可以将输出文件夹中的内容部署到Web服务器上,或者直接打开index.html文件在本地浏览器中查看。
打开index.html文件后,用户将看到一个简单的界面,其中包含点云数据的导航和显示控制选项。
在Potree的界面中,用户可以通过鼠标和键盘进行点云数据的导航和操作。
用户可以通过鼠标拖拽和滚轮缩放,实现点云数据的旋转和缩放。
用户还可以使用键盘上的箭头键进行平移和旋转。
这些操作使用户能够在三维空间中自由地浏览点云数据,从不同的角度和距离观察数据。
除了浏览点云数据,Potree还提供了一些分析和可视化的功能。
用户可以选择显示特定属性的点云数据,例如强度、颜色或分类信息。
用户还可以使用截面视图功能,通过在三维空间中选择一个平面,来查看点云数据在平面上的投影。
这对于观察点云数据的细节和特征非常有帮助。
此外,Potree还支持点云数据的筛选和查询。
用户可以根据属性值、距离或其他条件对点云数据进行筛选,以便于研究特定区域或特征。
Potree还支持将点云数据导出为Las文件格式,以便与其他软件进行进一步的分析和处理。
点云训练样本制作中LAS与HDF5数据格式转换

点云训练样本制作中LAS与HDF5数据格式转换杨鹏羽;姚连璧【摘要】深度学习技术在三维激光点云数据处理中的应用是近年来新的研究热点,应用点云数据(LAS格式)制作深度学习训练样本(HDF5文件格式)过程中涉及两种文件格式的转换的问题.基于VS2013开发平台创建MFC工程,搭建LAStools、HDF Group工程环境,利用车载移动测量系统采集到的LAS格式数据,设计了一款数据格式转换程序.经过实验验证,该转换程序稳定有效,解决了点云训练样本制作过程中数据格式转换的问题.【期刊名称】《矿山测量》【年(卷),期】2018(046)004【总页数】4页(P82-84,126)【关键词】LAS点云数据;HDF5文件格式;数据格式转换【作者】杨鹏羽;姚连璧【作者单位】同济大学测绘与地理信息学院,上海 200092;同济大学测绘与地理信息学院,上海 200092【正文语种】中文【中图分类】TD672车载移动测量系统[1]是20世纪末兴起的一种直接对道路表面进行三维密集采样的自动化测量技术。
应用该系统可快速获取具有三维坐标(X,Y,Z)和一定属性(反射强度等)信息的激光点云数据。
该数据存储于LAS格式下,具有海量、不规则空间分布的特点,在地物分类、三维建模等领域应用广泛。
近年来有学者提出利用深度学习技术实现三维点云数据的分类和分割设想,如美国斯坦福大学学者提出的PointNet神经网络模型[2],可直接对室内三维激光点云处理,实现对象分类、部分切割及场景语义分析。
但在国内该研究尚不成熟。
本文利用车载移动测量系统采集到的LAS格式数据,根据PointNet神经网络模型对训练样本格式(HDF5)的需要,介绍了一种数据格式转换方法。
文章主要内容包括LAS、HDF5文件格式解读,转换程序设计和实验验证。
1 数据格式解读1.1 LAS格式概述LAS数据格式是由美国摄影测量与遥感协会(ASPRS)下的LIDAR委员会于2003年发布的主要面向机载LIDAR数据的标准格式。
将点云处理成二维数据的方法
将点云处理成二维数据的方法一、引言点云数据是三维空间中点的集合,广泛应用于机器视觉、三维重建、自动驾驶等领域。
然而,点云数据通常具有高维度和复杂性,难以直接用于一些二维处理任务。
因此,将点云数据降维并转换为二维形式,是实现点云处理与分析的关键步骤。
本文将详细介绍将点云处理成二维数据的方法,包括点云数据的采集与预处理、降维处理、二维化处理、后处理以及方法比较与优化建议。
二、点云数据的采集与预处理在点云数据的采集过程中,通常使用激光雷达(LiDAR)或深度相机等设备获取空间中离散的点的集合。
这些原始点云数据可能存在噪声、冗余、遮挡等问题,需要进行预处理以净化数据。
预处理过程包括去噪、滤波、降噪、补全等技术,旨在提高点云质量,为后续处理提供准确的基础数据。
三、点云数据的降维处理由于点云数据具有高维度特性,直接处理会导致计算量大、效率低下。
因此,需要进行降维处理,将高维度的点云数据转换为低维度的表示。
常见的降维方法包括主成分分析(PCA)、自动编码器、拉普拉斯金字塔等。
这些方法通过保留数据的主要特征,降低数据的维度,同时尽可能保留原始数据的结构特征。
四、点云数据的二维化处理降维后的点云数据仍为三维形式,为了满足许多二维应用的需求,需要进一步将其转换为二维形式。
常见的二维化处理方法包括投影和切片。
投影是将三维点云投影到二维平面上,从而获得二维点云;切片则是从三维点云中提取某一平面内的二维点云。
这两种方法都可以将三维点云转换为二维形式,适用于不同的应用场景。
五、二维数据的后处理获取二维数据后,根据具体应用需求,可能还需要进行一些后处理操作。
常见的后处理包括滤波、去噪、特征提取、图像生成等。
这些技术旨在进一步增强二维数据的可用性,提取更多有价值的信息,为后续的识别、分类、目标检测等任务提供支持。
六、方法比较与优化建议在选择合适的点云二维化处理方法时,需要考虑实际应用需求、数据特性以及计算资源等因素。
不同的方法在降维效果、计算复杂度、数据精度等方面存在差异。
CAD中的点云处理和扫描数据导入方法
CAD中的点云处理和扫描数据导入方法点云是一种用于捕捉现实世界几何形状的数据集,它可以通过使用三维激光扫描仪等设备获取。
在CAD软件中,点云可以用于各种用途,例如建筑设计、产品设计和工程项目等。
本文将介绍CAD中的点云处理和扫描数据导入方法,帮助您更好地利用点云数据。
首先,我们需要将点云数据导入到CAD软件中。
不同的CAD软件支持不同的点云数据格式,例如.PCD、.PLY和.LAS等。
在导入之前,您需要将点云数据转换为CAD软件支持的格式。
您可以使用点云处理软件或者在线转换工具将点云数据转换为所需格式。
导入点云数据后,您可以开始进行点云的处理。
以下是一些常见的点云处理方法:1. 点云滤波:点云数据通常包含大量的噪点和无用信息。
通过应用点云滤波算法,您可以去除这些噪点和无用信息,提取出您所需的几何形状。
常用的点云滤波算法包括体素滤波、半径滤波和法线滤波等。
2. 点云配准:点云配准是将多个点云数据对齐到同一个坐标系中的过程。
通过点云配准,您可以将不同位置或角度下获取的点云数据融合成一个完整的模型。
常用的点云配准方法包括ICP算法和特征匹配算法等。
3. 点云分割:点云分割是将点云数据分割成多个具有独立几何结构的子集的过程。
通过点云分割,您可以提取出不同组成部分的几何信息,例如建筑物的墙面、地面和屋顶等。
常用的点云分割算法包括基于法线的分割和基于聚类的分割等。
以上是一些常见的点云处理方法,您可以根据实际需求选择适合的方法进行处理。
在进行点云处理之前,建议您先对点云数据进行可视化,以便更好地理解和分析。
最后,我们需要将处理后的点云数据导出或保存。
根据CAD软件的不同,您可以选择将点云导出为点云数据格式或转换为CAD中的几何对象。
导出点云数据时,建议您选择合适的数据格式和参数,以便在其他软件中使用或进一步处理。
在CAD中处理点云数据可能需要一定的专业知识和技巧。
如果您刚刚接触点云处理,建议您阅读相关的教程或参考书籍,以便更好地理解和应用。
二进制的xyz点云格式

二进制的xyz点云格式
二进制的xyz点云格式是一种将三维点云数据保存为二进制文件的方法,其中每个点由其x、y、z坐标值表示。
在该格式中,每个点的x、y、z坐标值都以浮点数的形式存储,并按照一定的顺序排列。
文件中的每个点都占用一定的字节数。
常见的二进制xyz点云格式包括:
1. XYZ格式:每个点的坐标值以浮点数的形式存储,按照x、y、z的顺序排列。
具体的二进制编码方式可以根据需要选择,如32位浮点数或64位浮点数。
2. PCD格式(Point Cloud Data):PCD格式是由点云库PCL (Point Cloud Library)定义的一种二进制点云格式。
它可以
存储点的位置、法线、颜色等信息,并支持不同数据类型和压缩方式。
3. LAS格式(LiDAR Data Exchange):LAS格式是一种广泛
应用于激光雷达数据的二进制点云格式。
它包含了点的位置、分类、强度、时间戳等信息,并支持多种压缩和索引方法。
这些二进制的xyz点云格式可以通过特定的函数或库进行读取和解析,以获得点云数据的坐标信息,并进行相关的处理和分析。
点云转换矢量

点云转换矢量全文共四篇示例,供读者参考第一篇示例:点云是一种由大量离散的点构成的空间数据集合,通常由激光扫描仪或者摄像机等设备采集得到。
点云数据广泛应用于地理信息系统、三维建模、机器人视觉等领域,因其高精度、快速获取等特点,成为了当前数字化技术不可或缺的重要数据形式之一。
点云数据通常具有较大的数据量和复杂性,直接对其进行分析和处理存在诸多挑战。
将点云数据转换为矢量数据是一种常见的处理方式,能够简化数据的表示形式,提高数据的可读性和利用性。
点云转换为矢量数据的过程涉及到多种方法和算法,可以根据实际应用场景和需求选择合适的方式进行转换。
在进行点云转换之前,首先需要对点云数据进行预处理,包括去噪、滤波、点云拟合等操作,以提高数据的质量和准确性。
接下来,根据需求可以选择不同的转换方法,常见的点云转矢量的方法包括网格化、曲面拟合、基于特征的方法等。
下面将介绍几种常见的点云转矢量的方法:1.网格化方法:网格化是将点云数据按照一定规则转换为网格数据的一种方法。
在网格化过程中,可以根据点云数据的空间分布和密度等特征,将点云数据分割为若干个小区域,并在每个小区域内生成网格数据。
网格化方法能够有效地保留点云数据的几何信息,适用于对点云数据进行三维可视化、地形建模等场景。
2.曲面拟合方法:曲面拟合是利用数学模型对点云数据进行曲面拟合的一种方法。
通过对点云数据进行曲面拟合,可以将点云数据转换为具有连续性和光滑性的曲面数据,便于进一步的分析和处理。
曲面拟合方法通常适用于对点云数据进行形状分析、对象识别等场景。
3.基于特征的方法:基于特征的方法是一种利用点云数据中的特征信息进行转换的方法。
通过提取点云数据中的关键特征点、边缘信息等,可以将点云数据转换为具有明显特征的矢量数据,便于进行特征匹配、对象识别等操作。
基于特征的方法适用于对点云数据进行特征提取和匹配的场景。
除了上述方法外,还有一些其他的点云转矢量的方法,如基于深度学习的方法、基于空间分析的方法等。
PCD(点云数据)文件格式

PCD(点云数据)⽂件格式本节描述PCD(点云数据)⽂件格式。
为什么⽤⼀种新的⽂件格式?PCD⽂件格式并⾮⽩费⼒⽓地做重复⼯作,现有的⽂件结构因本⾝组成的原因不⽀持由PCL库引进n维点类型机制处理过程中的某些扩展,⽽PCD⽂件格式能够很好地补⾜这⼀点。
PCD不是第⼀个⽀持3D点云数据的⽂件类型,尤其是计算机图形学和计算⼏何学领域,已经创建了很多格式来描述任意多边形和激光扫描仪获取的点云。
包括下⾯⼏种格式:PLY是⼀种多边形⽂件格式,由Stanford⼤学的Turk等⼈设计开发;STL是3D Systems公司创建的模型⽂件格式,主要应⽤于CAD、CAM领域;OBJ是从⼏何学上定义的⽂件格式,⾸先由Wavefront Technologies开发;X3D是符合ISO标准的基于XML的⽂件格式,表⽰3D计算机图形数据;其他许多种格式。
以上所有的⽂件格式都有缺点,在下⼀节会讲到。
这是很⾃然的,因为它们是在不同时间为了不同的使⽤⽬的所创建的,那时今天的新的传感器技术和算法都还没有发明出来。
PCD版本在点云库(PCL)1.0版本发布之前,PCD⽂件格式有不同的修订号。
这些修订号⽤PCD_Vx来编号(例如,PCD_V5、PCD_V6、PCD_V7等等),代表PCD⽂件的0.x版本号。
然⽽PCL中PCD⽂件格式的正式发布是0.7版本(PCD_V7)。
⽂件头格式每⼀个PCD⽂件包含⼀个⽂件头,它确定和声明⽂件中存储的点云数据的某种特性。
PCD⽂件头必须⽤ASCII码来编码。
PCD⽂件中指定的每⼀个⽂件头字段以及ascii点数据都⽤⼀个新⾏(\n)分开了,从0.7版本开始,PCD⽂件头包含下⾯的字段:·VERSION –指定PCD⽂件版本·FIELDS –指定⼀个点可以有的每⼀个维度和字段的名字。
例如:FIELDS x y z # XYZ dataFIELDS x y z rgb # XYZ + colorsFIELDS x y z normal_xnormal_y normal_z # XYZ + surface normalsFIELDS j1 j2 j3 # moment invariants...·SIZE –⽤字节数指定每⼀个维度的⼤⼩。
点云数据(pointcloud)【转】
点云数据(pointcloud)【转】转⾃caimagic的专栏⼀:什么是点云数据点云数据是指在⼀个三维坐标系统中的⼀组向量的集合。
这些向量通常以X,Y,Z三维坐标的形式表⽰,⽽且⼀般主要⽤来代表⼀个物体的外表⾯形状。
不经如此,除(X,Y,Z)代表的⼏何位置信息之外,点云数据还可以表⽰⼀个点的RGB颜⾊,灰度值,深度,分割结果等。
Eg..Pi={Xi, Yi, Zi,…….}表⽰空间中的⼀个点,则Point Cloud={P1, P2, P3,…..Pn}表⽰⼀组点云数据。
⼆:点云数据的获得⼤多数点云数据是由3D扫描设备产⽣的,例如激光雷达(2D/3D),⽴体摄像头(stereo camera),越渡时间相机(time-of-flight camera) 。
这些设备⽤⾃动化的⽅式测量在物体表⾯的⼤量的点的信息,然后⽤某种数据⽂件输出点云数据。
这些点云数据就是扫描设备所采集到的。
三:点云数据的⽤途作为3D扫描的结果,点云数据有多⽅⾯的⽤途,包括为制造部件,质量检查,多元化视觉,卡通制作,三维制图和⼤众传播⼯具应⽤等创建3D CAD模型。
当点云可以直接被描绘和观察时,通常点云本⾝不能直接⽤于3D应⽤,因此⼀般通过表⾯重建的⽅法将它转换为多边形或三⾓形等⽹状模型,NURBS曲⾯模型(曲线曲⾯的⾮均匀有理B样条模型)和CAD模型。
这⾥有很多技术应⽤在将点云转换为3D表⾯的过程中。
四:点云数据的格式点云数据是3D激光雷达扫描仪的基本输出。
这通⽤的点云数据⽂件形式是3D坐标⽂件(经常指⼀个xyz⽂件)。
这些⽂件是ASCII,因此可以被所有的后处理软件读取。
这些像素在⼀个3D灰度⽂件⾥⾯是如下形式灰度像素点云数据:X1, Y1, Z1,灰度值1X2, Y2, Z2,灰度值2。
同样的,这些像素在⼀个rgb⽂件⾥⾯是如下形似彩⾊点云数据:X1, Y1, Z1, r1, g1, b1X2 , Y2, Z2, r2, g2, b2………………⼀般来说,每个扫描仪制造商和每个点云数据处理软件制造商都有他们各⾃特定的⼆进制⽂件。
点云数据与STL格式转换共17页
41、学问是异常珍贵的东西,从任何源泉吸 收都不可耻。——阿卜·日·法拉兹
42、只有在人群中间,ຫໍສະໝຸດ 能认识自 己。——德国43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
点云数据与STL格式转 换
6、纪律是自由的第一条件。——黑格 尔 7、纪律是集体的面貌,集体的声音, 集体的 动作, 集体的 表情, 集体的 信念。 ——马 卡连柯
8、我们现在必须完全保持党的纪律, 否则一 切都会 陷入污 泥中。 ——马 克思 9、学校没有纪律便如磨坊没有水。— —夸美 纽斯
10、一个人应该:活泼而守纪律,天 真而不 幼稚, 勇敢而 鲁莽, 倔强而 有原则 ,热情 而不冲 动,乐 观而不 盲目。 ——马 克思
03-点云文件常用格式转换(pcd,txt,ply,obj,stl)
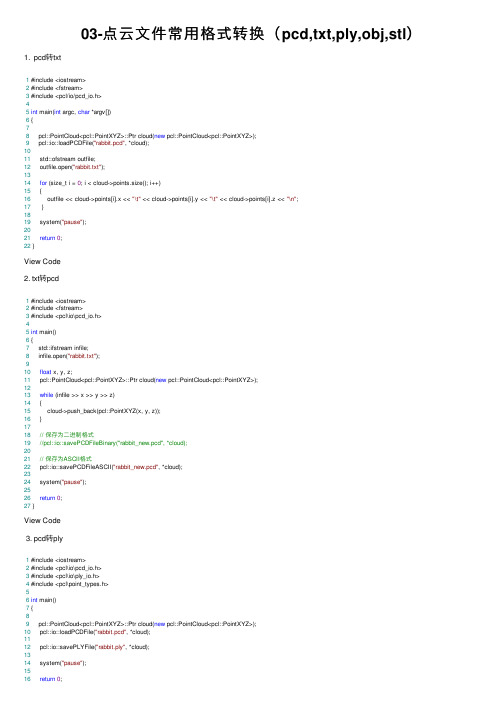
03-点云⽂件常⽤格式转换(pcd,txt,ply,obj,stl)1. pcd转txt1 #include <iostream>2 #include <fstream>3 #include <pcl/io/pcd_io.h>45int main(int argc, char *argv[])6 {78 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);9 pcl::io::loadPCDFile("rabbit.pcd", *cloud);1011 std::ofstream outfile;12 outfile.open("rabbit.txt");1314for (size_t i = 0; i < cloud->points.size(); i++)15 {16 outfile << cloud->points[i].x << "\t" << cloud->points[i].y << "\t" << cloud->points[i].z << "\n";17 }1819 system("pause");2021return0;22 }View Code2. txt转pcd1 #include <iostream>2 #include <fstream>3 #include <pcl\io\pcd_io.h>45int main()6 {7 std::ifstream infile;8 infile.open("rabbit.txt");910float x, y, z;11 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);1213while (infile >> x >> y >> z)14 {15 cloud->push_back(pcl::PointXYZ(x, y, z));16 }1718// 保存为⼆进制格式19//pcl::io::savePCDFileBinary("rabbit_new.pcd", *cloud);2021// 保存为ASCII格式22 pcl::io::savePCDFileASCII("rabbit_new.pcd", *cloud);2324 system("pause");2526return0;27 }View Code3. pcd转ply1 #include <iostream>2 #include <pcl\io\pcd_io.h>3 #include <pcl\io\ply_io.h>4 #include <pcl\point_types.h>56int main()7 {89 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);10 pcl::io::loadPCDFile("rabbit.pcd", *cloud);1112 pcl::io::savePLYFile("rabbit.ply", *cloud);1314 system("pause");1516return0;17 }View Code4.ply 转pcd1 #include <iostream>2 #include <pcl\io\pcd_io.h>3 #include <pcl\io\ply_io.h>4 #include <pcl\point_types.h>56int main()7 {89 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); 1011 pcl::io::loadPLYFile("rabbit.ply", *cloud);121314 pcl::io::savePCDFileBinary("rabbit.pcd", *cloud);1516 system("pause");1718return0;19 }View Code5. obj/ply转pcdobj/ply转pcd(均匀采样)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点云格式转换:
在日常工作中,我们所用到的点云一般都为三角化后输出的网格面数据,其格式为标准格式STL格式。
另一种为输出的点数据ASCII 格式.
⑴.STL是以一个文件的方式输出.输出的时候有ASCII和
binary两种方法,一般采用二进制(binary)的方法输出,
可以节省空间.
⑵.ASCII是把文件分成许多小的文件包输出的.一般是用输
出的点数来限制文件包的.
其中,STL是最常用的格式,因为它所包含的信息最全面,而且可以被大多数的软件所接受.
但有时因为不同的应用,测量后输出的数据有可能为VTX(顶点文件)、WRL和IV格式,而常用软件CATIA在导入点云时不支持以上两种格式.这时我们可以利用以下方法将VTX、WRL和IV转化为ASC 格式: 以上图中的foot模型为例.
⑴.用写字板将WRL格式文件打开.原文件大小为444KB.
⑵.将文件另存为TXT或DAT格式.此时文件大小为454KB.
⑶.将另存后的DAT文件的后缀名改为ASC格式.但此时文件大
小没有改变.(此时,如遇大型文件不方便存储和拷贝.)
⑷.用Imageware将文件打开,再重新另存为ASCII文件,此时文件
大小为293KB.
2
IV格式的转化同上.
VTX格式的转化与上面方法基本相似,只是在写字板中将VTX 文件打开后会同时显示每个点的坐标和I,J,K变量值.需在坐标值与I,J,K变量值之间的空格处用逗号替换后再与以上方法同步即可.
以上方法的优点:1.在没有专用的三维扫描软件的情况下可以进行转换.2.可将大型的VTX、WRL、IV格式文件转换为ASCII文件,以方便存储和拷贝.
缺点:步骤烦硕,不能一步到位.特别是在大型文件的转换时,尽量避免采用VTX格式进行转换.
由于经验有限,以上方法难免有疏漏不正之处,敬请不吝指正.。