红外图像的处理及其MATLAB实现
基于MATLAB的红外图像增强技术研究与应用
基于MATLAB的红外图像增强技术研究与应用1.1 选题目的及意义利用红外成像技术实现的目标检测识别跟踪是现代军事防御系统的关键组成局部. 它在侦察告警上的应用是国内正在研究和攻关的课题,是军事武器系统的自动化、智能化、现代化的重要标志之一〔,,2〕.随着现代战争级别的不断升级,对高科技的依赖和运用的要求也不断提升.因此,对红外目标的检测和跟踪也提出了更高的要求,既要保证较高的检测概率和较低的虚警概率,又要在较短的时间内做出判断乃至相应的反响.然而,由于红外传感器受到大气热辐射、作用距离远、探测器噪声等因素影响,其探测到的目标在红外图像上.呈现为比照度低的目标,特别是在检测信号相对较弱和背景有非平稳的起伏干扰情况下,目标边缘甚至全部都有可能被大量复杂的噪声(杂波)所淹没,而图像信噪比低,形状和结构的信息缺乏,更增加了检测跟踪目标的难度.所以对于红外图像的增强处理改善图像质量显得尤其重要.通常来讲图像增强只是存在于影像处理系统预处理过程中,而在对图像增强之后还要有相应的理解识别等处理,所以图像的增强效果好坏对于图像的识别理解至关重要. 目前,针对图像的各种增强算法研究已经很多,但针对红外图像能够获得良好的处理效果的方法还不多,尤其对于红外图像整体的亮度存在较大变化且噪声严重的情况,因此研究图像增强的算法具有重要的理论意义和实际应用价值.1.2 图像增强技术的理论军队获取的红外图像效果都不理想,因此要经过图像处理以后才’能使用,其中图像增强技术是常常使用的方法.图像增强技术的目的是提升图像质量,更准确地说,图像增强是用来去除噪声、清楚图像边缘、突出图像细节的技术.通常图像增强技术的应用增强了人类的观察水平,提升了自动图像处理系统的成功性和准确性.几十年来,许多图像增强技术被提出并得到开展.并初步形成了一套比拟完整的算法体系.图像增强方法大致可分为两类〔4〕:一类是频域处理法,一类是空域处理法.空域算法是直接对图像的像素进行处理,根本上是以灰度映射变换为根底的151,所用的映射变换取决于图像的特点和增强的目的.具体说来,空域法包括点运算和模板处理两种,其中点运算是针对每个像素点进行的,与周围的像素点无关,而模板运算是在每个像素点的邻域内进行的.点运算中效果比拟好的是直方图均衡161(HistogramEquahzation , HE)它是统计意义上的增强方法,对于成像过程中曝光缺乏或者曝光过度造成的图像明显偏暗或偏亮现象有很好的效果;图像的灰度直方图是图像中各像素对应的灰度等级分布的近似概率密度函数,灰度直方图均衡化是经典的图像增强技术,其根本原理是对一幅图像的灰度直方图经过一定的变换之后,使其灰度分布成为均匀或根本均匀.直方图均衡化的意义是通过处理以后使得分布在每一个灰度等级上的像素个数相等或根本相等,但是由于灰度直方图只是近似的概率密度函数,因此,当用离散的灰度等级做变换时,很难得到完全平坦均匀的结果,而且当灰度直方图有多个波峰时,它将使图像增强过度,使得输出图像有较严重的噪声出现.邻域处理又称模板处理,它分为图像平滑和图像锐化两类.图像平滑的主要目的是减少噪声.在频域里由于噪声频率多在高频段,因此可以采用各种形式的低通滤波来减少噪声,在空域和频域均可采用图像平滑的方法.具体说来,有邻域平均法、中值滤波、噪声消除法、梯度倒数加权等.图像锐化的主要目的是使边缘和轮廓模糊的图像变得清晰,并使其细节清楚.但由于锐化使噪声受到比信号还要强的增强,所以要求锐化处理的图像有较高的信噪比,否那么锐化后图像的信噪比更低.边缘细节增强可利用各种梯度算子和反锐化掩模技术来实现.频域法是在图像的某种变换域内,对变换后的系数进行运算,然后再反变换到原来的空域得到增强的图像.这是一种间接处理方法.比方,先对图像进行傅里叶变换,再对图像的频域进行滤波处理,最后将滤波处理后的图像反变换到空间域,从而获得增强后的图像.对于一幅图像来说,高频局部大致对应着图像中的边缘细节,低频局部大致对应着图像中过渡比拟平缓的局部.常用的图像变换有傅里叶变换、小波变换、离散余弦变换、沃尔什变换和霍特林变换等.在这些变换下通常应用低通滤波、高通滤波、带阻滤波、同态滤波等方法处理图像.低通滤波是利用低通滤波器去掉反映细节和跳变性的高频分量,对图像的作用就是把尖峰去掉,但同时也将边缘的跳变信息也去掉了,因而使得图像比拟模糊,故也称平滑滤波作用.例如,对灰度反差太强的图像、受到尖峰天线干扰或有明显颗粒干扰的图像都可起平滑作用.低通滤波器有指数滤波器和梯形滤波器等.高通滤波是利用高通滤波器忽略图像中过渡比拟平缓的局部,突出那些能代表细节、跳变等的高频局部,使得增强后的图像边缘细节局部清楚.这种方法适宜于图像中物体的边缘提取.但由于通过的低频太少故处理后的图像视觉效果不好.高通滤波器有指数滤波器和梯形滤波器等.同态滤波解决的是光照不均匀或光动态范围过大引起不清楚的图像.但是在实际应用中,人们往往根据图像的实际情况,把几种方法综合运用到一起以取得更好的图像处理效果.但是随着侦查工作对图像增强处理效果的不断提升,人们寻找着新的增强方法.小波分析〔研厄veletsAnalysis〕是近年来迅速开展起来学科,它具有深刻的理论和广泛的应用范围.小波分析是一种信号的时间一尺度〔时间一频率〕方法,它具有多尺度分析的特点,而且在时域和频域都具有表征信号局部特征的水平,是一种窗口大小固定不变,但其形状可以改变的时频局部化分析方法.即在低频局部具有较高的频率分辨率和较低的时间分辨率,又在高频局部具有较高的时间分辨率和较低的频率分辨率,很适合于探测正常信号中夹带的瞬变反常信号并分析其成分,所以被誉为分析信号的显微镜.由于小波分析具有多尺度分析的水平可以对信号和图像在不同尺度上进行分解,在小波域进行去噪、压缩处理后,做友变换得到信号和图像.小波分析用于非平稳信号和图像的处理优于传统的傅立叶变换,这己被许多应用领域的所证实.小波变换的思想来源于伸缩与平移方法.小波分析方法的提出,最早采用的标准正交基,这是最早的小波基.后来对傅立叶级数建立了二进制频率分量分组理论,对频率按二进制进行划分,其傅立叶变换的相位变化并不影响函数的大小,这也是多尺度分析思想的最早来源.后来, Calderon、Zygmund > Stern等将L-p理论推广到高维,并建立了奇异积分算子理论.1986年,Meyer及其学生此marie提出了多尺度分析的思想. 1987年Mallat将计算机视觉领域内的多尺度分析思想引入到小波分析中,提出了多分辨分析的概念,统一了在此之前的所有正交小波基的构造,并提出了相应的分解与重构快速算法.1988年,年轻的女数学家Daubechiesl.提出了具有紧支撑的光滑正交小波基—Daubeehies基,为小波的应用研究增添了催化剂,同年, Daubeehies1在美国主办的小波专题讨论会上进行了十次演讲,引起了广阔数学家、物理学家甚至某些企业家的重视,由此将小波的理论和实际应用推向了一个高潮.小波分析是传统傅里叶变换的重大突破,已经引起了国际上众多学术团体和学科领域的兴趣与关注,成为当今的前沿科学,开展之迅速,应用范围之广泛是前所未有的. 现在小波分析理论正向着大规模并行科学计算中的快速计算方向开展,同时,由于小波分析中小波基的多样性和灵活性,使其在不同应用领域的特殊性研究更加具有实用性. 可以预见像小波分析这样的多尺度分析必将在红外图像增强领域取得突破性的进展.基于多尺度分析的图像增强技术在目前图像处理领域研究中尚处于开展性阶段,国内外已有很多学者开始对此方法进行研究.由于小波分析的图像增强技术包含了小波的分解与合成运算,其数据量大,运算时间较长,因此在许多实际应用中,特别是实时系统中没有得到认可和推广,但这并不说明小波分析不适用于图像增强.由于小波分析本身无可替代的优越性,其处理结果常常比某些传统的处理方法更令人满意.随着算法的不断改进以及高速芯片的研制成功,其速度问题将会得到解决.第四章基于小波变换的图像增强从现实中获取到的图像往往混杂着噪声,尤其是军事侦察中获取的红外图像.实践中发现图像增强的传统方法往往使图像细节突出的同时放大了噪声而对图像采取先降噪声后增强的方法也会对图像的细节造成损失.这给侦察工作带来很大矛盾和阻碍.而被誉为“数学显微镜〞的小波变换由于具有很好的时频特性,在近年来得到迅速开展,因为小波变换采用了多分辨率的方法,具有低嫡性,所以使得图像增强的同时而又不放大噪声成为可能.4.1小波变换增强原理传统的提升图像比照度的方法是基于直方图变换的方法,如前面提到的直方图均衡及改良的双向直方图均衡等.这些方法对灰度级过于集中,还有大量的灰度级没有充分利用的情况比拟适用.但是对于图像中人眼很难分辨的某些细节局部,这些细节信号集中的灰度范围占整个灰度级空间,使用这些方法就无法对这些分布在不同的区域的像素进行不同程度的放大或者缩小.而多尺度比照度增强方法较好地解决了这个问题123 — 2刀.如图4.1所示,其中4.1(a)为原始信号,有两局部细节信号,用椭圆标示出.利用平滑滤波对原始信号进行平滑,得到图 4.1(b)中的平滑曲线,可以认为是原始信号的近似表达,它抛除了细节信号而保存了原始信号的整体特征.用原始信号减去近似信号, 即得到图4.1(c)所示的细节信号,然后对该细节信号进行增强,例如乘以一个放大系数,结果如图4,1体).最后将增强后的细节信号加到近似信号上重构出增强后的原始信号如 图4.1(e),可以看出增强后的原信号整体特征没有改变,但是两局部细节信号得到了增 强,更适合人眼识别.⑹增强后的复原信号(e) Enhanced reconstruct signal图4.1从一个直观的角度来阐述信号增强处理方法.当提取低频信号时利用第二章 中介绍的小波就能对信号进行多尺度的分解,得到低尺度下的一个低频信号和不同尺度 下的各个高频信号,低频信号就是原信号的一个近似表达,而各个高频信号就是各个分 辨率下的细节,这样可以使得某种分辨率下难以区分的特征在另一种分辨率下很容易地 被区分和检测.针对二维图像信号,小波分解通常采用 Mallat 快速算法,通过一维的高通和低通分(a)原始信号(a) Original signal(b)低频信号 (b) Low frequency si^nid (d)增强细节信号(C)细节信号解滤波器先后作用于图像的行和列,从而实现图像的二维小波变换.这样在每一个分解尺度上都可以得到4个不同的次级子图像,其中LL是低频局部,它代表图像的主要内容信息,集中了图像的绝大局部能量,而HL、LH和HH是高频局部,分别代表图像的水平方向的细节、垂直方向的细节和对角线方向的细节.如果对图像的低频局部继续进一步作小波分解,就可以得到多个尺度的图像时频信息,从而实现多分辨的小波分析,如图 4.2.对图像进行小波分解是为得到不同尺度下的小波系数,并对其中的高频局部进行相应的处理,而经过处理后的小波系数,还需要进行小波的图像重构,这样才能得到增强处理后的效果图像.和图像的小波分解相反,小波图像重构只需要使用一维的低通和高通重构滤波器,作用于相应的小波系数,就能得到最后的重构图像.因此,这里使用一种基于小波变换的增强方法,该原理对应的流程图如图4.3,具体步骤为:步骤1:首先读取一幅图像,选取小波函数,初始化相关参数.步骤2:对原始图像进行一次分解,得到第一级小波系数cA(l) , cH(l), cv(l), cD(l),如果当前小波分解级数j小于小波分解级数J,那么继续对近似小波系数cA(l)进一步分解, 得到下一级小波系数,一直到j=J结束.步骤3:可以对步骤2分解得到各级小波系数进行修正.步骤4:从第J级小波系数开始,对小波系数CA(J), cH(J), cv 口), cD 口)进行重构,得到第J 一1级小波近似系数cA(J - 1),如果当前小波分解级数j大于l ,那么继续根据得到的小波近似系数cA(J 一l)和小波系数cH(J - 1), cv □— l) , cD □— 1)进行重构,直至j=J 结束.将最后一级小波系数重构得到的结果作为输出图像.4.2小波系数增强方法侦查哨在图像的获取过程中,由于传感器噪声、随着大气端流和成像光源的散射等多方面因素,图像的分辨率和比照度产生下降,传统的图像增强算法在改善的比照度和增强图像的细节的同时放大了噪声,所以不能满足军队侦查的需要.因此必须进行基于小波变换的图像增强,它能在不同尺度级上对感兴趣的频率分量采取不同的处理形式, 使增强更灵活、有效、层次感强,并且在突出图像细节特征的同时,能有效抑制图像噪声的影响.下面介绍了几种小波系数增强的方法.4.2.1 分段小波系数增强方法根据红外图像噪声在小波变换域中表现为较小的小波系数,可以采取设定不同的域值,对小波系数进行分段处理.即设定一个映射函数,把表现为噪声的很小的小波系数 映射为零,这样就能抑制一局部噪声的影响;而对大于设定域值的小波系数,使它的放 大倍数随着系数值的增大而减小 ;而对于处在中间的小波系数,还是按相同的放大倍数增强.这里假设不、兀分别代表较低域值和较高域值,用呱和城以代表增强前后的小波系数,可以用式(4.1)映射函数描述分段增强的原理 :由此增强过程可见,当图像中的噪声幅值很小时,由噪声所引起的绝大局部小波系 数都会得到抑制,而且对正常图像信号的损坏程度也很小并且能够接受.但军事红外图 像中常含有许多微弱的图像信号,由这些微弱信号变换的小波系数值与由噪声引起的小 波系数一样的小,这样采用分段增强法不仅会消除噪声,而且会模糊或损坏局部细节信 号.这样就无法提取所需细节了.4.2.2 非线性小波系数增强非线性小波系数增强可以在不同尺度下对高频分量进行增强处理,这样的方法可以很好的称补分段增强方法的缺点.非线性函数的种类有很多本节采用(4.2)式的非线性增强函数. f(x)~a\sigm[c(x -b) - sigm[-c(x + 6)]]}其中,a = -------- --------- ------------------ , sigm(x) ~ ——, 0Mb < 1,c 是一常数(singm ngm[-c(l + i>)]) .)设各个高频子带图像增强后的小波系数表达式为式那么有 = a max f ;(i,7){s^m[c(/;(ij)-b)]}图4.4即为b=0.25 , c=40时候的增益函数曲线.八(匕也)八例…)4"7;逐y -T x <W in < T y-1 0- 8 0,6 O. 4 O. 2 0 O, 2 O. 4 O+ 6 O, tt 】4.2.3 自适应小波系数增强方法4.2.1 或4.2.2节所提出的小波系数增强方法,实际上都是对图像高频系数进行增强以实现图像增强的目的,但是并没有根据图像中噪声的特性进行处理,当噪声存在于某一级小波系数中时,对于该级小波系数的增强的同时也会放大噪声.因此为了能在增强图像的同时,更好的有效地抑制噪声,利用在同一空间位置上相邻尺度下的小波系数的相关性这一特征区分噪声和真实图像信号,实际上在相邻尺度间的同一位置处由噪声引起的小波系数的相关性通常都非常小,通过求取每个空间位置上的小波系数相关性,有效地找到并抑制噪声的影响128〕.自适应小波增强方法原理如图 4.5所示,首先计算得到相邻尺度间的小波系数相关值,然后在分段小波增强方法的根底上,再根据相关值的大小判断它是否为噪声,如果为噪声那么置零,如果不是噪声,那么可以按正常倍数放大增强.这既可以有效地抑制噪声, 预防噪声被同步增强,又能保存原始图像中的微弱信号信息.在实际应用中如果一幅红外图像含有噪声,那么许多小波系数,特别是在较高分辨率尺度上的小波系数是由噪声引起的,而仅仅根据一层频域分解的子带分量所提供的信息有效的区分噪声和信号是很困难的,那么当进行小波反变换时任何对这些小波系数的放大都会反映到对噪声的增强上.由于含噪信号在多尺度分解后,真实信号的各尺度上的系数间具有很强的相关性,而噪声对应的系数的相关性那么很弱或者不相关,因此相临尺度小波系数相关性可以用来确定哪些系数是由图像中的噪声产生,哪些是由图像中的细节特征产生.综上所述,要想在增强小波系数的同时抑制噪声,就必须利用多尺度方法得到的多个尺度的分量,先确定哪些系数是由噪声产生,哪些系数由真正的图像信号产生的,再通过构造合理的线性或非线性变换函数,有选择地改变小波系数以提升图像某些区域的比照度,从而改善图像的视觉效果.从而有针对性地对系数进行增强处理.下面介绍两种常用而有效的增强方法.4.2.3.1模极大值法增强1992年5.Mallat将uPCnits指数与小波变换后系数模的局部极大值联系起来,通过小波变换后局部极大值在不同尺度上的衰减速度来衡量信号的局部奇异性.这种方法后来被广泛应用于故障诊断,信号的去噪与恢复,奇异性检测及图像边缘恢复等.根据信号与噪声在不同尺度上的模极大值的不同传播特性,侦查员从所有小波变换的局部模极大值中选择信号的模极大值而去除噪声的模极大值,即去除幅度随尺度的增加而减小的极值点,保存幅度随尺度增加而增大的极值点.由于白噪声具有负的UPchitz 指数,其幅度随尺度的增加而减少,而有用信号恰好相反.因此,如果某个信号的小波变换局部模极大值随尺度的减小而快速增大,那么说明该处的奇异性主要有噪声限制lz9, 01.区分出噪声与细节后,采用图 4.2.1的方式进行增强处理.具体算法步骤如下:步骤1:求出每个尺度上小波变换系数代,厂对应的局部模极大值点.步骤2:从尺度j=l上的每个模极大点开始,在尺度j+1上寻找尺度j上每个模极大点对应的传播点,保存有用信号产生的模极大值点,消除噪声引起的模极大值点;对于保存的逐级搜索,至尺度j二J 一1为止.步骤3:在最大分解尺度J上,小波变换模极大值几乎完全由有用信号限制,选取一个闭值,使得模极大值小于该闭值的被作为噪声去除,由此得到最大尺度上新的模极大值.步骤4:由各尺度保存下来的模极大值点及其模极大值点的位置,采用硬闭值的方法进行增强处理,而对于这些点外的信息就认为受噪声限制,采用软闭值进行降噪处理.图4.6给出了算法流程图对应程序代码见附录.开始结束实验一:为了验证模极大值法对图像处理的效果,选定一幅受污染的 Lena 图像,计算模极大值有效点.条件:选定各级小波系数模的阈值 :ThreLevel1=10; ThreLevel2=50 ; ThreLevel3= 100. 图4.8是小波分解后各级小波系数模值、方向和在方向上的局部极大值,从图中可 以发现各级分解出得图像信息混有许多噪声,尤其是第一级分解后的图像信息根本分辨 不出来哪些是有用信息哪些是噪声.图 4.9为利用模极大值方法计算出的有效的边缘信 息.从图4.9中可以看出,经过模极大值方法可以从各层中分辨出了噪声并去处杂乱的 噪声留下有用信息,使得主体边缘变得突出,人像轮廓也越发清楚.因此说明此方法能 够较好的获取到噪声外的有效极大值点信息.并且由于图像的比照度正比于图像灰度强 度的相对变化,故而在灰度图像的局部区域内,比照度与灰度梯度有关,即低比照度相 应灰度梯度较小,高比照度相应灰度梯度较大.5] i 注超译•j -r “ .—- k二一 —_-- ― "n Mi M A _ _ _ Atil , Edit 北 H如工fizidcv口睛H 昼 ?或 & □ 2 口X朝6Q8DDD重60 too tSGJBTSO60 ID O⑶SO 100150 300 250MfMlal圜X4O却加加60 Mle01国而«印Maxt M®£2M M 34.3实验结果及分析 1 .实验一本文主要介绍了传统增强方法和小波变换增强方法,它们都有各自的特点.本节将 把这两种方法做以比照并用实验效果图加以验证.选取一幅参加高斯噪声的 Lena 图像,图像分辨率大小为 256x256 , 8bits 分别采用传统增强方法与本章所提出的方法对受污染图像处理.条件:(1)原图像中各层次的细节都比拟丰富,小波函数选取双正交小波 ;(2)小波分解为3层.(3)组合方式增强方法中采用 sobel 算子得到高频信息局部加权与平滑后图像进行 叠加的结果.其中加权值 k=3.0.(4)模极大值方法中参数与 4, 2.3.1节中的实验相同高频增强的方式中实验参数与3.4.4节相同.(5)小波系数域相关性降噪的参数 :Tl=Pi/160;T2=Pi/6;T3=Pi;Tll=Pi/3;T22=Pi/12;T33=Pi.(6)小波系数域相关性非线性增强的参数:Tl=Pi/160;T2= Pi/6;T3=Pi/3;Tll=pi/80;T22=Pi/12;T33=Pi;B1=0.25;C1=40;B2=0.25;C2=40;B3=0.3;C3=10;50 1DQ15020025G20 40 60 C010OI20file Edit ]£i w lM-rt Iw«ll.■工kt 叩 findg H ♦灯□ H a 4 僦 ec® / 口回-i □204060800020 1- 4—20 40 6020 40 SC(e)高频增强(c) High frequency enhancement⑴非线性小波增强(f) Non-linear wavelet enhancemenl(a)原始图像(b)含高斯噪声图像(b) Image with gauss noise (a) Original image|At jrQ I M&I B M M〞口0 05 Q/ OQ a □(c)直方图均衡化(c) Histogram equalization(d)组合空间增强(d) Combine spatial enhancement。
matlab提供的红外图像增强实例

matlab提供的红外图像增强实例matlab里提供的TM图像增强实例:View code for landsatdemoRun this demoLandsat Color Compositelandsatdemo Landsat color composite demo.This demo allows you to experiment with creating color composites fromLandsat Thematic Mapper /doc/2118913923.html,ndsat data consists of7spectral bandsthat each reveal different features of the region that is imaged.Thedata is read into a512-by-512-by-7array.To create a color composite,we form an RGB image by assigning spectral bands to red,green,and blueintensities.Try out some common color composites by clicking on the radiobuttons.The numbers in square brackets map the spectral bands to red,green,and blue.The array[321]means band3will be shown as redintensities,band2will be shown as blue intensities,and band1willbe shown as green intensities."True Color[321]"-shows what our eyes would see from an airplane."Near Infrared[432]"-shows vegetation as red,water as dark."Shortwave Infrared[743]"-shows changes due to moisture.Click on"Custom Composite",and change the popup menus to create your own combinations of red,green,and blue.Click on"Single Band Intensity"to see individual bands as grayintensity images.Try turning off"Saturation Stretch"by clicking on the checkbox.Formost Landsat data sets,saturation stretching is important.Whensaturation stretching is turned on,the demo clips2%of the pixels ineach band and does a linear contrast stretch before displaying theimage.Try turning on"Decorrelation Stretch"by clicking on the checkbox.This visual enhancement increases color separation by eliminatingcorrelation between channels,making subtle spectral differenceseasier to recognize.If both"Saturation Stretch"and"DecorrelationStretch"are checked,the decorrelation stretch is followed by alinear saturation stretch.While the demo is running,you can bring the image and data into the workspace.IMG=landsatdemo('getimage')brings the image into the workspace.DATA=landsatdemo('getdata')brings all7bands into the workspace.Note----Permission to use Landsat TM data sets provided by Space Imaging, LLC,Denver,Colorado.Example-------data=landsatdemo('getdata');truecolor=data(:,:,[321]);stretched=imadjust(truecolor,stretchlim(truecolor),[]);imshow(truecolor),figure,imshow(stretched)See also decorrstretch,imadjust,stretchlim,ipexlanstretch.Run this demo。
基于Matlab的红外图像处理算法研究 附录:源程序
源程序:1、线性变换增加对比度:X1=imread('pout.tif');figure,imshow(X1)f0=0;g0=0;f1=70;g1=30;f2=180;g2=230;f3=255;g3=255;figure,plot([f0,f1,f2,f3],[g0,g1,g2,g3]) axis tight,xlabel('f'),ylabel('g')title('intensity transformation')r1=(g1-g0)/(f1-f0);b1=g0-r1*f0;r2=(g2-g1)/(f2-f1);b2=g1-r2*f1;r3=(g3-g2)/(f3-f2);b3=g2-r3*f2;[m,n]=size(X1);X2=double(X1);for i=1:mfor j=1:nf=X2(i,j);g(i,j)=0;if (f>=0)&(f<=f1)g(i,j)=r1*f+b1;elseif (f>=f1)&(f<=f2)g(i,j)=r2*f+b2;elseif (f>=f2)&(f<=f3)g(i,j)=r3*f+b3;endendendfigure,imshow(mat2gray(g))f0=0,g0=0;f1=10,g1=5;f2=160,g2=240f3=255,g3=255figure,plot([f0,f1,f2,f3],[g0,g1,g2,g3]) axis tight,xlabel('f'),ylabel('g')title('intensity transformation')运用Matlab函数X1=imread('pout.tif');figure,imshow(X1)J=imadjust(X1,[0.25,0.6],[],1.2322) figure,imshow(J)2、求反X1=imread('pout.tif');figure,imshow(X1)f1=200;g1=256;figure,plot([0,f1],[g1,0])axis tight,xlabel('f'),ylabel('g')title('intensity transformation')k=g1/f1;[m,n]=size(X1);X2=double(X1);for i=1:mfor j=1:nf=X2(i,j);g(i,j)=0;if(f>=0)&(f<=f1)g(i,j)=g1-k*f;elseg(i,j)=0;endendendfigure,imshow(mat2gray(g)) 3、对数变换处理X1=imread('liftingbody.png'); figure,imshow(X1);c=255/log(256);x=0:255;y=c*log(1+x);figure,plot(x,y)axis tight,xlabel('f'),ylabel('g') title('intensity transformation') [m,n]=size(X1);X2=double(X1);for i=1:mfor j=1:ng(i,j)=c*log(X2(i,j)+1);endendfigure,imshow(mat2gray(g))运用Matlab函数X1=imread('circuit.tif');figure,imshow(X1)J=imadjust(X1,[],[0.1 0.8],0.35287) figure,imshow(J)4、直方图均衡化I=imread('tire.tif');J=histeq(I);imshow(I)figure,imshow(J)figure,imhist(J,64)figure,imhist(I,64)5、直方图规定化I=imread('tire.tif');hgram=0:255J=histeq(I,hgram);imshow(I)figure,imshow(J)figure,imhist(I,64)figure,imhist(J,64)6、平滑滤波均值平滑滤波I=imread('moon.tif');J=imnoise(I,'salt',0.02);imshow(I)figure,imshow(J)K1=filter2(fspecial('average',3),J)/255; K2=filter2(fspecial('average',5),J)/255;K3=filter2(fspecial('average',7),J)/255; figure,imshow(K1)figure,imshow(K2)figure,imshow(K3)中值平滑滤波调用B=medfilt2(A,[m,n])I=imread('moon.tif');J=imnoise(I,'salt',0.02);imshow(I)K1=medfilt2(J,[3,3]);figure,imshow(K1)调用B=ordfilt2(A,order,domain)I=imread('moon.tif');imshow(I)figure,imshow(J)J=imnoise(I,'salt',0.02);K1=ordfilt2(J,5,ones(3,3));figure,imshow(K1)7、线性锐化滤波器拉普拉斯变换I=imread('saturn.tif');h=fspecial('laplacian');I2=filter2(h,I);imshow(I)figure,imshow(I2)对比度增强锐化滤波器I=imread('saturn.tif');h=fspecial('unsharp',0.5);I2=filter2(h,I)/255;imshow(I)figure,imshow(I2)8、非线性锐化滤波器I=imread('blood1.tif');figure,imshow(I)h1=fspecial('sobel');I2=filter2(h,I);figure,imshow(I2)I3=conv2(I,h1);figure,imshow(I3)h2=fspecial('prewitt');I4=filter2(h2,I);figure,imshow(I4)h3=fspecial('log');I5=filter2(h3,I);figure,imshow(I5)9、频域增强(低通滤波)I=imread('saturn.tif');figure,imshow(I)I2=imnoise(I,'salt');figure,imshow(I2)f=double(I2);g=fft2(f);g=fftshift(g);[N1,N2]=size(g);n=2;d0=50;n1=fix(N1/2);n2=fix(N2/2);for i=1:N1for j=1:N2d=sqrt((i-n1)^2+(j-n2)^2);h=1/(1+0.414*(d/d0)^(2*n));result(i,j)=h*g(i,j);endendresult=ifftshift(result);X2=ifft2(result);X3=uint8(real(X2));figure,imshow(X3)10、频域增强(高通滤波)I=imread('liftingbody.png');figure,imshow(I)f=double(I);g=fft2(f);g=fftshift(g);[N1,N2]=size(g);n=2;d0=50;n1=fix(N1/2);n2=fix(N2/2);for i=1:N1for j=1:N2d=sqrt((i-n1)^2+(j-n2)^2);if d==0h=0;elseh=1/(1+(d0/d)^(2*n));endresult(i,j)=h*g(i,j);endendresult=ifftshift(result);X2=ifft2(result);X3=uint8(real(X2));figure,imshow(X3)。
可见光与红外光融合matlab
在当今科技发达的社会中,图像的获取和处理技术日趋完善。
可见光和红外光是两种重要的图像采集方式,分别具有各自独特的优势和应用领域。
如何有效地将可见光和红外光进行融合,充分发挥它们的优势,在图像处理和分析中发挥重要作用。
Matlab作为一种功能强大的图像处理和分析工具,对于可见光与红外光融合有着得天独厚的优势,为研究人员提供了便捷而高效的工具。
一、可见光与红外光的优势和应用可见光是人眼可见的光线,其波长范围约为380nm到780nm。
可见光图像具有丰富的信息,可以直观地表现物体的颜色、形状和纹理等细节。
可见光图像广泛应用于人脸识别、车牌识别、安防监控等领域。
红外光是人眼不可见的光线,波长范围大约在780nm到1mm之间。
红外光可以穿透雾霾、烟尘等大气污染物,具有良好的穿透能力。
红外光图像通常用于夜视、无人机监测、红外成像等领域。
二、可见光与红外光融合的意义和挑战可见光和红外光各自具有独特的优势,在不同的场景中有着各自的应用。
但是,在实际应用中,单一光谱图像难以满足对目标特征的完整描述和分析。
将可见光和红外光进行融合具有重要意义和挑战。
可见光与红外光融合可以克服单一光谱图像的局限性,更全面地呈现目标的特征和细节。
融合后的图像可以提高目标的检测和识别精度,提高图像的质量和可用性。
然而,可见光与红外光的差异性以及融合算法的选择和优化等方面的挑战也是不可忽视的。
如何有效地融合两种不同光谱图像,充分发挥它们的优势,是当前图像处理领域的研究热点之一。
三、Matlab在可见光与红外光融合中的应用Matlab作为一种功能强大的科学计算软件,拥有丰富的图像处理和分析工具箱,为可见光与红外光融合提供了便捷而高效的工具。
1. 图像的获取和处理Matlab可以方便地获取、读取和显示可见光和红外光图像,支持多种图像格式。
通过图像处理工具箱,可以对图像进行预处理、滤波、配准等操作,为后续的融合算法提供良好的输入。
2. 可见光与红外光融合算法Matlab提供了丰富的图像融合算法,包括但不限于像素级融合、特征级融合、区域级融合等。
matlab 热成像 算法
matlab 热成像算法
MATLAB在热成像领域有着广泛的应用,可以用于热成像图像的
处理、分析和算法开发。
热成像是利用物体发出的红外辐射来生成
图像的一种技术,常用于工业、医学和军事领域。
在MATLAB中,可
以利用各种工具箱和函数来实现热成像算法的开发和应用。
首先,热成像图像的预处理是很重要的一步。
在MATLAB中,可
以使用图像处理工具箱中的函数对热成像图像进行去噪、增强和边
缘检测等操作,以提高图像质量和准确性。
其次,针对热成像图像的特征提取和分析,可以利用MATLAB中
的特征提取工具箱和机器学习工具箱来进行。
可以使用各种特征描
述子来描述热成像图像中的红外辐射分布特征,比如灰度共生矩阵、方向梯度直方图等。
然后可以利用聚类、分类或回归算法来分析和
识别热成像图像中的目标或特征。
此外,热成像图像的重建和可视化也是热成像算法中的重要环节。
MATLAB提供了各种图像重建和可视化的函数和工具,可以将热
成像数据转换为可视化的热图或三维图像,以便更直观地观察和分
析热成像结果。
最后,MATLAB还提供了丰富的红外图像处理和分析的示例代码
和文档,可以帮助开发者快速上手热成像算法的开发和应用。
同时,MATLAB还支持与其他工程软件和硬件的集成,可以方便地将热成像
算法应用于实际的工程和科研项目中。
总之,MATLAB在热成像算法的开发和应用中具有非常强大的功
能和灵活性,可以满足各种热成像图像处理和分析的需求。
希望以
上内容能够对你有所帮助。
红外图像的处理与MATLAB实现

红外图像的处理及其MATLAB 函数实现0.引言随着红外技术日新月异的发展,红外技术在军事及人们日常生活中有着越来越广泛的应用。
但由于红外探照灯及红外探测器件的限制,红外成像系统的成像效果仍然不够理想。
在民用监测应用中,主要表现为夜视距离近,图像背景与被监测目标之间对比度模糊,被监测目标细节难以辨认,图像特征信息不明确等方面。
为使图像更适于人眼观测、适用于图像后续目标识别及跟踪处理,有必要在红外图像采集和处理上做进一步的研究,来增强红外图像视觉效果。
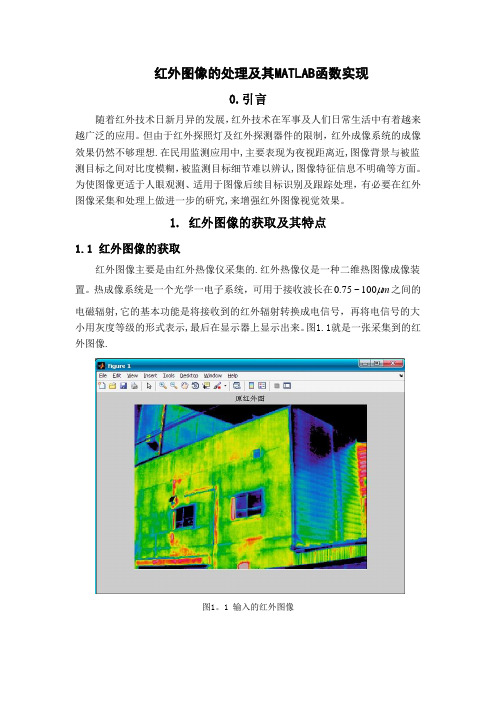
1. 红外图像的获取及其特点1.1 红外图像的获取红外图像主要是由红外热像仪采集的。
红外热像仪是一种二维热图像成像装置。
热成像系统是一个光学一电子系统,可用于接收波长在m 100~75.0之间的电磁辐射,它的基本功能是将接收到的红外辐射转换成电信号,再将电信号的大小用灰度等级的形式表示,最后在显示器上显示出来。
图1.1就是一张采集到的红外图像。
图1.1 输入的红外图像1.2 红外图像的特点红外图像反映了目标和背景不可见红外辐射的空间分布,其辐射亮度分布主要由被观测景物的温度和发射率决定,因此红外图像近似反映了景物温度差或辐射差。
根据其成像原理,总结红外图像特点如下:(1)红外热图像表征景物的温度分布,是灰度图像,没有彩色或阴影(立体感觉),故对人眼而言,分辨率低、分辨潜力差;(2)由于景物热平衡、光波波长、传输距离远、大气衰减等原因,造成红外图像空间相关性强、对比度低、视觉效果模糊;(3)热成像系统的探测能力和空间分辨率低于可见光CCD阵列,使得红外图像的清晰度低于可见光图像;(4)外界环境的随机干扰和热成像系统的不完善,给红外图像带来多种多样1噪声、光子电子涨落噪声等等。
噪声来源的噪声,比如热噪声、散粒噪声、f多样,噪声类型繁多,这些都造成红外热图像噪声的不可预测的分布复杂性。
这些分布复杂的噪声使得红外图像的信噪比比普通电视图像低;(5)由于红外探测器各探测单元的响应特性不一致等原因,造成红外图像的非均匀性,体现为图像的固定图案噪声、串扰、畸变等。
C#与MATLAB混合编程应用于红外图像小目标的检测

块 编 成 m 函数 . 然 后 利 用 Ma t l a b D e p l o y T o o l 生 成.
M a t l a b是 由美 国 Ma t h Wo r k s 公 司发 布 .具 有 N E T组件 。具体 步骤 如下 :
数值分 析 、 矩 阵计 算 、 科 学数仿 真等诸 多 功能 .主 要应 用 于
目标 在 所 成 的 红外 图像 上 仅 为几 个 到 几 十个 像 用 混合 编程方法 构 建程 序 程序 可视化 界面 部分 素. 通 常表现 为 孤点 或斑 点 红外小 目标 的检 测 非 由 C #程序 来 实现 .复 杂 数 据处 理 过程 由 M a t l a b 常 困难 目标 极 易被 复杂 背景 和噪声 淹没 。 为 提高 后 台实现 用户 通过 可视 化界 面上 的命令 控 件来 a t l a b处 理过 程 . 得到 处理结 果 。 目标识 别效 率 .一般 用单 帧 图像进 行 红外 小 目标 调 用 M 的检测【 l 1
测。
【 关键 词 】 : Ma t l a b c ≠ ≠ 混合 编程 形 态学算 法 红 外小 目标
0 、 引 言
软 件 可 视 化 界 面 设 计 上 功 能 较 差 .不 易 设 计 出 功
在 红外搜 索 与跟 踪 系统 中 .红外 图像 小 目标 能完善 的软件 系统 界 面 .同时所 开发 出的软 件平 的检测是 一项 关键 技术 所 谓 红外 图像 小 目标 . 简 台 移 植 性 较 差 称 红外小 目标 , 是指 当 目标 距 离成像 设 备较 远 时 , 为 了发挥 两者 的优 点 . 避 开各 自缺点 . 本 文采
【 摘 要 】 : 本 文介 绍 了一种 通过 Ma t l a b生 成. N E T组件供 c ≠ ≠ 调 用从 而 实现 混合 编程 的 方 法, 以及利 用混合 编程 的形 态学组合 算 法 实现 红外 图像 小 目标 的检 测 。 实验 结果表 明 , 此种 混合 编 程 方法有 效 实 用 ,充分利 用 了 Ma t l a b和 c ≠ ≠ 软件 各 自优 点 ,较 好 实现 了红 外 图像 小 目标 的检
Matlab预处理近红外光谱

Matlab预处理近红外光谱1. 微分处理光谱一阶微分公式:x i,1st=x i−x i+g二阶微分公式:x i,2st=x i+x i+g−2x i2式中,x i是谱图数据中i波数下的透过率,g为窗口宽度一阶导数MATLAB代码:X1st=diff(X,1);%X 为输入光谱矩阵,X1st 为输出一阶导数光谱矩阵二阶导数MATLAB代码:X2st=diff(X,2); %X 为输入光谱矩阵,X2st 为输出二阶导数光谱矩阵2. 多元散射校正处理谱图(1)计算平均光谱:x̅i,j=∑X i,j ni=1n(2)一元线性回归:X i=m i X̅+b i (3)多元散射校正:X i(MSC)=(X i−b i)m i公式中X表示n×p维定标光谱数据矩阵,n为样品数,p为波点数。
X̅表示所有样品的原始近红外光谱在各个波长点处求平均值所得到的平均光谱矢量,X i是1×p维矩阵,表示单个样品光谱矢量,m i和b i 分别表示各样品近红外光谱X i与平均光谱X进行一元线性回归后得到的相对偏移系数和平移变量。
I代表第i个样本,j代表第j个波数。
MATLAB代码如下:me=mean(X);[m,~]=size(X);for i=1:m,p=polyfit(me,X(i,:),1);Xmsc(i,:)=(X(i,:)- p(2)*ones(1,n))./(p(1)*ones(1,n));End代码中输入光谱矩阵为X,输出光谱矩阵为Xmsc。
3. 标准正态变量变换(SNV)X i,SNV=x−x√∑(x i,k−x i)2 mk=i(m−1)式中x i是第i样品光谱的平均值,k=1,2,…,m。
m为波长点数;i=1,2,..,n。
n为校正样品数;X i,SNV是变换后的光谱。
SNV的MATLAB代码如下:[~,n]=size(X);rmean=mean(X,2);dr=X-repmat(rmean,1,n);Xsnv=dr./repmat(sqrt(sum(dr.^2,2)/(n-1)),1,n);代码中X 为光谱输入矩阵,Xsnv 为SNV 处理后光谱输出矩阵。
数字图像,红外图像处理,matlab实现
1数字图像,红外图像处理,高温定标点校正程序%读取高温定标点二进制数据,将数据信息存储到pic2矩阵里clc;clear;a1=fopen('handdat_34.dat','rb','b'); %打开二进制数据信息pic1=fread(a1,[200 200]); %将二进制数据信息读出到200*200的多维数组里面a2=fopen('hidat_62.dat','rb','b');pic2=fread(a2,[200 200]);a3=fopen('low31dat_62.dat','rb','b');pic3=fread(a3,[200 200]);b=mean2(pic2); %求pic2的平均值将结果返回给bA=b*ones(200);K=A./pic2; %计算校正因子200*200矩阵数组Kpic2_K_hi=K.*pic2; %高稳定点校正高温图片pic3_K_hi=K.*pic3; %高稳定点校正低温图片pic1_K_hand_hi=K.*pic1; %高稳定点校正目标成像图片figure(1);subplot(131) ,imshow(uint8(pic2_K_hi),[ ]), title('高温定点校正高温图片'); ;subplot(132) ,imshow(uint8(pic3_K_hi),[ ]),title('高温定点校正低温图片'); subplot(133) ,imshow(uint8(pic1_K_hand_hi),[ ]),title('高温定点校正目标成像图片');figure(2);subplot(131) ,mesh(1:200,1:200,roundn(pic2_K_hi,-3)),title('高温定点校正高温三维图');subplot(132) ,mesh(1:200,1:200,pic3_K_hi),title('高温定点校正低温三维图'); subplot(133) ,mesh(1:200,1:200,pic1_K_hand_hi),title('高温定点校正目标成像三维图');colormap gray; % 选为灰度2 字图像,红外图像处理,低温定标点校正程序%读取低温定标点二进制数据,将数据信息存储到pic3矩阵里clear;clc;a1=fopen('handdat_34.dat','rb','b'); %打开二进制数据信息pic1=fread(a1,[200 200]); %将二进制数据信息读出到200*200的多维数组里面a2=fopen('hidat_62.dat','rb','b');pic2=fread(a2,[200 200]);a3=fopen('low31dat_62.dat','rb','b');pic3=fread(a3,[200 200]);b=mean2(pic3); %求pic2的平均值将结果返回给bA=b*ones(200);K=A./pic3; %计算校正因子200*200矩阵数组Kpic2_K_low=K.*pic2; %低温定标点校正高温图片pic3_K_low=K.*pic3; %低温定标点校正低温图片pic1_K_hand_low=K.*pic1; %低温定标点校正目标成像图片figure(1);subplot(131) ,imshow(pic2_K_low,[ ]); title('低温定标点校正高温图片'); subplot(132) ,imshow(uint8(pic3_K_low),[ ]); title('低温定点校正低温图片'); subplot(133) ,imshow(pic1_K_hand_low,[]);title('低温定点校正目标成像图片');figure(2);subplot(131) ,mesh(1:200,1:200,pic2_K_low),title('低温定标点校正高温图片'); subplot(132) ,mesh(1:200,1:200,roundn(pic3_K_low,-3)),title('低温定点校正低温图片');subplot(133) ,mesh(1:200,1:200,pic1_K_hand_low),title('低温定点校正目标成像图片');colormap gray; % 选为灰度3 Matlab程序实现,图像处理,红外图像处理,两点校正高温或低温图片--红外图像校正%两点校正程序文件clear;clc;a1=fopen('handdat_34.dat','rb','b'); %打开二进制数据信息pic1=fread(a1,[200 200]); %将二进制数据信息读出到200*200的多维数组里面a2=fopen('hidat_62.dat','rb','b');pic2=fread(a2,[200 200]);a3=fopen('low31dat_62.dat','rb','b');pic3=fread(a3,[200 200]);%求解阵列焦平面高温定标点相应均值A1A1=mean(pic2(:)); %求pic2的平均值将结果返回给b% A1=b1*ones(200);% K1=A1./pic2; %高温定点校正因子200*200矩阵数组K%求解阵列焦平面低温定标点相应均值A2A2=mean(pic3(:)); %求pic2的平均值将结果返回给b% A2=b2*ones(200);% K2=A2./pic3; %计算校正因子200*200矩阵数组KGij=(A1-A2)./(pic2-pic3); %求增益校正系数GijOij=(A1.*pic3-A2.*pic2)./(pic2-pic3); %求偏置校正系数Oij%两点校正高温图片Yij_hi=Gij.*pic2-Oij;%两点校正低温图片Yij_low=Gij.*pic3-Oij;%两点校正目标成像图片Yij_handdat=Gij.*pic1-Oij;figure(1);subplot(131),imshow(Yij_hi,[ ]), title('两点校正高温图片');subplot(132),imshow(Yij_low,[ ]),title('两点校正低温图片');subplot(133),imshow(uint8(Yij_handdat),[ ]),title('两点校正目标成像图片');figure(2);subplot(131) ,mesh(1:200,1:200,roundn(Yij_hi,-3)),title('两点校正高温图片三维图');subplot(132) ,mesh(1:200,1:200,roundn(Yij_low,-3)),title('两点校正低温图片三维图');subplot(133) ,mesh(1:200,1:200,Yij_handdat),title('两点校正目标成像图片三维图');colormap gray; % 选为灰度%colormap gray; % 选为灰度Yij_handdat = uint8(Yij_handdat); save('Yij_handdat', 'Yij_handdat')4 直方图均衡化,图像处理,matlab实现%直方图均衡化增强图像clc;clear;load Yij_handdat;I= Yij_handdat;J= histeq(I,256) ; %对I 进行直方图均衡化[M,N]=size(I);figure(1);subplot(131) ,imshow(I) ,title('两点校正后的图像') ;subplot (132), imshow(J), title('直方图均衡化后的图像');subplot (133),mesh(1:M,1:N,double(J)),title('直方图均衡化后三维图');figure(2) ;subplot(121) ,imhist(I,90), title( '两点校正后的直方图');subplot(122) ,imhist(J) ,title(' 均衡化后的直方图');5 红外图像,分段线性变换,matlab实现%分段线性变换clc;clear;% X1=imread('liang_dian_jiaozheng.png');load Yij_handdat.mat;X1 = Yij_handdat;% X1= rgb2gray(X1) ;f0=0;g0=0;%对图像灰度进行分段的点f1=123;g1=70;f2=240;g2=150;f3=256;g3=220;figure,plot([f0,f1,f2,f3],[g0,g1,g2,g3])axis tight,xlabel('f'),ylabel('g')title('intensitytransformation')%绘制变换曲线r1=(g1-g0)/(f1-f0);b1=g0-r1*f0r2=(g2-g1)/(f2-f1);b2=g1-r2*f1;r3=(g3-g2)/(f3-f2);b3=g2-r3*f2;[m,n]=size(X1);X2=double(X1);for i=1:mfor j=1:nf=X2(i,j);g(i,j)=0;if(f>=f1)&(f<=f2)g(i,j)=r1*f+b2;elseif(f>=f2)&(f<=f3)g(i,j)=r3*f+b3;endendendfigure;subplot(131),imshow(X1),title('两点校正后的图像');subplot(132),imshow(g, []),title('分段线性变换后的图像');subplot(133),mesh(roundn(g,-3)),title('分段线性变换后图像三维图');6.选择分段线性变换进行灰度处理——自选算法将图像灰度区间分成两段乃至多段,然后分别作灰度变换处理以达到更加鲜明的对比效果,同时不失图像原有的信息,分段线性变换的函数表达式为:1112111122122222(t )(min)(t min)(min)min min (t )(t )(t)(t t )(t )(max)(t )(t t )(t )max max f f f t t t f f f f t t t t t f f f t t t ⎧--+≤≤⎪-⎪⎪-=-+≤≤⎨-⎪⎪--+≤≤⎪-⎩在公式(4-1)中,(t 1, f(t 1))和(t 2,f(t 2))是图4.1中两个转折点坐标。
matlab处理红外图像课程设计

matlab处理红外图像课程设计一、课程目标知识目标:1. 掌握红外图像的基本概念、产生原理及其在现实生活中的应用。
2. 学习MATLAB软件的基本操作,了解其在图像处理领域的功能特点。
3. 理解并掌握红外图像预处理、特征提取和目标检测等基本方法。
技能目标:1. 能够运用MATLAB软件对红外图像进行读取、显示、保存等基本操作。
2. 能够运用MATLAB对红外图像进行预处理,包括滤波、增强等操作。
3. 能够运用MATLAB进行红外图像的特征提取和目标检测,并分析检测结果。
情感态度价值观目标:1. 培养学生对红外图像处理技术的兴趣,激发他们探索未知、勇于创新的科学精神。
2. 培养学生运用所学知识解决实际问题的能力,增强他们的自信心和成就感。
3. 增强学生的团队协作意识,培养他们在合作中学习、共同进步的良好品质。
本课程针对高年级学生,结合学科特点和教学要求,注重理论与实践相结合,使学生能够在掌握基本知识的基础上,提高实际操作能力。
课程目标明确,分解为具体的学习成果,以便于后续的教学设计和评估。
通过本课程的学习,旨在培养学生的图像处理技能,为他们在相关领域的发展奠定基础。
二、教学内容1. 红外图像基础知识:包括红外图像的原理、特性及其应用场景,对应教材第2章。
2. MATLAB软件入门:介绍MATLAB软件的基本操作,重点讲解图像处理相关的工具箱,对应教材第3章。
3. 红外图像预处理:涵盖图像读取、显示、保存,以及滤波、增强等预处理方法,对应教材第4章。
4. 特征提取与目标检测:讲解红外图像的特征提取方法,如边缘检测、角点检测等,以及目标检测算法,如模板匹配、背景减除等,对应教材第5章。
5. 实践操作与案例分析:结合实际红外图像,运用MATLAB软件进行预处理、特征提取和目标检测等操作,分析并优化结果,对应教材第6章。
教学内容安排和进度:第1周:红外图像基础知识学习;第2周:MATLAB软件入门及基本操作;第3周:红外图像预处理方法;第4周:特征提取与目标检测方法;第5周:实践操作与案例分析。
在Matlab中进行红外图像处理和目标探测
在Matlab中进行红外图像处理和目标探测红外图像处理和目标探测是红外技术中非常重要的一部分。
而在现如今的科技发展中,Matlab成为了处理红外图像和开展目标探测的一种常用工具。
本文将介绍在Matlab中进行红外图像处理和目标探测的基本原理和方法,以及一些应用实例。
首先,我们来了解一下红外图像的基本特点。
红外图像是通过记录物体发射的热辐射能量来获取的,与可见光图像不同,红外图像能够透过雾霾、烟尘等气象条件,对目标进行探测和跟踪。
红外图像中不同的灰度值代表了不同的物体温度,通过对这些灰度值的分析和处理,我们可以提取出目标的位置、大小、形状等信息。
在Matlab中进行红外图像处理的第一步是图像预处理。
预处理的目的是去除一些无关的噪声和背景,以提高图像的质量。
常用的预处理方法包括平滑滤波、傅里叶变换、直方图均衡化等。
平滑滤波可以减少图像中的噪声,使目标更加清晰可见。
傅里叶变换可以将图像从空域转换到频域,方便后续的处理。
直方图均衡化可以增强图像的对比度,使目标更加容易分离。
接下来,我们需要进行图像分割,将图像中的目标与背景进行分离。
常用的图像分割算法有阈值分割、区域生长法、边缘检测等。
阈值分割是最简单的一种方法,通过设定一个阈值,将图像中灰度值大于阈值的像素点设为目标,灰度值小于阈值的像素点设为背景。
区域生长法是将相邻的像素点聚类成一个区域,然后通过比较区域之间的差异来判断是否属于目标。
边缘检测则是通过检测图像中的边缘来提取目标。
在图像分割之后,我们需要进行目标特征提取。
目标特征提取是将目标从图像中提取出来,并量化为一些可以描述目标特性的数值或向量。
常用的目标特征包括面积、周长、中心位置、轮廓等。
通过提取这些特征,我们可以对目标进行分类和识别。
接下来,我们需要进行目标探测。
目标探测是在图像中寻找和定位目标的过程。
常用的目标探测方法有模板匹配、形状匹配、颜色匹配等。
模板匹配是将一个模板与图像进行比较,找到与模板最相似的位置。
红外光谱基线校正matlab代码
红外光谱基线校正matlab代码一、引言在红外光谱分析中,基线漂移是一个常见的问题,特别是在采集样品时,由于一些外部因素的影响,使得光谱图像的基线产生偏移,这会对后续的分析和建模造成影响。
进行基线校正是十分必要的。
本文将介绍在matlab环境下进行红外光谱基线校正的相关代码。
二、基线校正方法在红外光谱基线校正中,常用的方法有多项式拟合、小波变换、Savitzky-Golay滤波等。
本文将重点介绍多项式拟合方法进行基线校正。
1. 数据导入需要将采集到的红外光谱数据导入matlab中进行处理。
这部分代码如下:```matlabdata = load('IR_spectrum.txt');x = data(:,1); 波数y = data(:,2); 吸光度```2. 多项式拟合基线校正多项式拟合是一种常用的基线校正方法,通过拟合光谱数据的基线曲线,并将其减去,从而实现基线的校正。
具体代码如下:```matlabn = 10; 多项式阶数p = polyfit(x, y, n); 多项式拟合baseline = polyval(p, x); 拟合的多项式曲线corrected_spectrum = y - baseline; 校正后的光谱```3. 绘制结果为了直观地观察基线校正的效果,可以将原始光谱和校正后的光谱进行对比绘制。
下面是相关的代码:```matlabfigure;subplot(2,1,1);plot(x, y, 'b', x, baseline, 'g');xlabel('波数');ylabel('吸光度');title('原始光谱和拟合的基线');subplot(2,1,2);plot(x, corrected_spectrum, 'r');xlabel('波数');ylabel('吸光度');title('校正后的光谱');```以上是在matlab环境下进行红外光谱基线校正的相关代码,通过多项式拟合方法可以有效地实现光谱基线的校正。
基于Matlab的红外图像处理算法研究
目录摘要 (I)Abstract (II)第1章绪论 (1)1.1研究背景和意义 (1)1.2国内外研究现状及发展趋势 (2)1.3论文的主要内容安排 (4)第2章红外图像的介绍 (6)2.1红外热成像技术的介绍及其特征 (6)2.2红外图像产生原理以及红外图像的特点 (6)2.3红外图像的直方图介绍 (7)2.4红外图像的性质分析(对比度、分辨率、噪声) (8)2.5本章小结 (9)第3章红外图像增强算法研究 (10)3.1红外图像增强处理总体介绍 (10)3.2空间域增强 (11)3.2.1空域变换、对比度增强 (12)3.2.1.1分段线性变换 (12)3.2.1.2图像反转 (15)3.2.1.3对数变换 (16)3.2.1.4直方图均衡化 (17)3.2.1.5直方图规定化 (20)3.2.2空域滤波增强 (22)3.2.2.1均值平滑滤波 (22)3.2.2.2中值平滑滤波 (24)3.2.2.3 线性锐化滤波 (25)3.2.2.4 非线性锐化滤波 (27)3.3频域增强 (29)3.3.1低通滤波 (29)3.3.2 高通滤波 (30)3.4其他常用的及改进后的红外图像增强处理算法 (31)3.5本章小结 (32)第4章结论 (33)参考文献 (34)致谢 (35)摘要随着现代红外技术的快速发展,民用红外监控系统及军用红外探测系统得到了广泛的应用。
由于红外摄像器件本身及探测环境影响,成像效果并不理想。
在实际应用中,需要对获得的红外图像进行必要的增强处理,使其更适于人眼观察。
同时利用对红外目标的检测、分割来确定不易辨认的目标物,为后续的识别与智能控制等奠定基础。
本文首先介绍了红外成像机理,在分析了红外图像特点的基础上,比较了几种经典红外图像增强算法。
根据红外成像具有图像模糊、噪声大等特点,提出了用直方图均衡增强灰度、用中值平滑滤波消除噪声的红外图像处理算法。
实验结果表明,该算法能够增强图像目标、有效的抑制噪声,具有较好的视觉效果。
MATLAB环境下红外图像增强处理算法研究和仿真
将处理结果和原图像进行比较
f=imread('3.bmp'); gm=medfilt2(f); w4=fspecial('laplacian',0); gm=im2double(gm); g4=gm-imfilter(gm,w4,'replicate'); figure,imshow(g4)
将两次的处理结果进行比较
图像一的处理及结果
f=imread('1.bmp'); w4=fspecial('laplacian',0); f=im2double(f); g4=f-imfilter(f,w4,'replicate'); figure,imshow(g4)
将处理后的结果和原图像进行比较
f=imread('1.bmp'); w8=[1 1 1;1 -8 1;1 1 1]; f=im2double(f); g8=f-imfilter(f,w8,'replicate'); figure,imshow(g8)
非线性空间滤波
非线性空间滤波也是基于邻域操作 的,与线性空间滤波类似,可通过定 义一个大小为m*n的邻域,以其中心 点滑过一幅图像的方式进行操作。例 如,令每个中心点处的响应等于其邻 域内的最大像素值的操作即为非线性 滤波。另一个基本区别是,掩模的概 念在非线性处理中并不流行。滤波的 概念仍然存在,但“滤波器”应看做 是一个基于邻域像素操作的非线性函 数,其响应组成了在邻域的中心像素 处操作的响应。
实际应用中应当根据图像数据特征和处理要求来选择合适的方实验步骤采集图像分析图像研究算法图像增强结果分析采集图像采集图像并分析图像图像一模糊不清没有噪声采集图像并分析图像图像二有大量的噪声称为椒盐噪声采集图像并分析图像图像三有大量的椒盐噪声而且模糊不清算法研究线形空间滤波线形滤波源于频域中信号处理所使用的傅立叶变换线性运算包括将邻域中每个像素与相应的系数相乘然后将结果进行累加从而得到该点处的响应
基于MATLAB的红外图像界面设计及图像分割研究

式中x,y=1,2,的坐标结合[不包括点此种算法简单快速,但主要缺点是会削弱噪声和图为了更好地适应数据图像处理,其方程式以离散变量如式(3):(3)(a)拉普拉斯运算模板(b)拉普拉斯运算扩展模板(c)拉普拉斯其他2种模板1 拉普拉斯模板中值滤波对单脉冲效应和噪声有很好的控制效果,可以抑制任意噪声,合理降低边缘模糊度。
但是,它不其卷积算子:取适合的阈值TH并区分如下:s(i,j)>TH,(i, j)阶跃状边缘点,s(i,j)}是边缘图像。
索贝尔边缘检测器不仅具有很好的边缘检测效果,图2 一阶微分边缘检测算子模板2.3边缘检测算子 边缘检测方法是基于高斯函数的一阶微分,能在噪声抑制和边缘检测之间取得良好的平衡。
边缘检测的实现步骤如下:(1)采用高斯滤波对图像进行平滑处理;(2)采用一阶导数有限差分法计算梯度的大小和方向;(3)不是梯度振幅的最大衰减抑制;(4)检测并连接边缘。
3 红外图像的MATLAB界面设计及图像分割3.1界面的总体设计(1)首先在MATLAB中点击“文件→新建→GUI”,启动主布局设计器。
(2)在版面设计器中添加必要的控件,根据设计需图3 加入控件的最初界面添加控件后,根据设计中实现的件,打开属性编辑器以更改每个控件要更改String的属性以显示控件是控件的表示形式,fontange、Fontsize性,可以根据需要更改其他属性。
调整其位置和大小,以达到美观。
中国设备工程 2023.07(下)图4 设置控件属性后的界面 图5 菜单设计器(4)使用菜单编辑器(Menu Editor)打开、保存和退出文件。
在Layout Designer中,单击菜单编辑器图标以打开菜单编辑器并创建新菜单,如图5所示。
(5)如图5所示,增加了主菜单。
属性编辑器显示在右侧。
将Label属性更改为“文件”,将Tag属性更改为“文件”。
然后在“文件”菜单中添加子菜单以打开、保存和退出。
编写相应代码在界面设计器上选中要实现功能的按钮,右键点击,Callbacks→Callback”,打m代码添加到文件编辑器并editor进行调试。
红外图像的处理及其MATLAB实现
红外图像的处理及其MATLAB 函数实现0.引言随着红外技术日新月异的发展,红外技术在军事及人们日常生活中有着越来越广泛的应用。
但由于红外探照灯及红外探测器件的限制,红外成像系统的成像效果仍然不够理想.在民用监测应用中,主要表现为夜视距离近,图像背景与被监测目标之间对比度模糊,被监测目标细节难以辨认,图像特征信息不明确等方面。
为使图像更适于人眼观测、适用于图像后续目标识别及跟踪处理,有必要在红外图像采集和处理上做进一步的研究,来增强红外图像视觉效果。
1. 红外图像的获取及其特点1.1 红外图像的获取红外图像主要是由红外热像仪采集的.红外热像仪是一种二维热图像成像装置。
热成像系统是一个光学一电子系统,可用于接收波长在m 100~75.0之间的电磁辐射,它的基本功能是将接收到的红外辐射转换成电信号,再将电信号的大小用灰度等级的形式表示,最后在显示器上显示出来。
图1.1就是一张采集到的红外图像.图1。
1 输入的红外图像1.2 红外图像的特点红外图像反映了目标和背景不可见红外辐射的空间分布,其辐射亮度分布主要由被观测景物的温度和发射率决定,因此红外图像近似反映了景物温度差或辐射差.根据其成像原理,总结红外图像特点如下:(1)红外热图像表征景物的温度分布,是灰度图像,没有彩色或阴影(立体感觉),故对人眼而言,分辨率低、分辨潜力差;(2)由于景物热平衡、光波波长、传输距离远、大气衰减等原因,造成红外图像空间相关性强、对比度低、视觉效果模糊;(3)热成像系统的探测能力和空间分辨率低于可见光CCD阵列,使得红外图像的清晰度低于可见光图像;(4)外界环境的随机干扰和热成像系统的不完善,给红外图像带来多种多样的噪声,比如热噪声、散粒噪声、f1噪声、光子电子涨落噪声等等.噪声来源多样,噪声类型繁多,这些都造成红外热图像噪声的不可预测的分布复杂性。
这些分布复杂的噪声使得红外图像的信噪比比普通电视图像低;(5)由于红外探测器各探测单元的响应特性不一致等原因,造成红外图像的非均匀性,体现为图像的固定图案噪声、串扰、畸变等。
基于MATLAB的红外图像增强算法研究
基于MATLAB的红外图像增强算法研究电子信息科学与技术专业学生:郭岭指导教师:曹斌芳近年来,随着电子计算机技术的进步,计算机图像处理得到了飞跃的发展,己经成功的应用于几乎所有与成像有关的领域,并正发挥着相当重要的作用。
它利用计算机对数字图像进行系列操作,从而获得某种预期的结果。
对图像进行处理时,经常运用图像增强技术以改善图像的质量增强对某种信息的辨识能力,以更好的应用于现代各种科技领域,图像增强技术的快速发展同它的广泛应用是分不开的,发展的动力来自稳定涌现的新的应用,我们可以预料,在未来社会中图像增强技术将会发挥更为重要的作用。
在图像处理过程中,图像增强是十分重要的一个环节。
因此,对图像增强技术和方法进行研究对国计民生有着十分重要的作用。
MATLAB based infrared image enhancementalgorithm based onAbstract: in general, after image transfer and conversion, such as imaging, copying scanning, transmission and display, often resulting in a decline in image quality, image distortion. When shooting due to illumination insufficient or excessive, will make the image too dark or too bright; optical system distortion, relative motion, air flow will make the image blur, transmission process will introduce various types of noise. In the input image in the visual effect and convenient identification and other aspects may exist a lot of problem, this kind of problem can collectively referred to as the quality problems. Image enhancement is definedaccording to the specific need to highlight the image of importantinformation, at the same time reduction or removal of unwanted information. From different ways of acquiring images, through appropriate enhancement processing, can be originally ambiguous or evenimpossible to distinguish the original image processing into a clear abundant useful information can use the image, effectively remove the image noise, enhance image edges or other regions of interest, and thus more easily interested in the image of the target detection and measurement. The processed image is to maintain the status quo is the be of no great importance, not considering the image of some ideal form to a conscious effort to reproduce the image fidelity. The purpose of image enhancement is to enhance the visual effects of the image, the original image is converted into a more suitable for human observation and computer analysis form. It generally with human visual characteristics, in order to obtain looks better visual effect, rarely involve the objective and unified evaluation standard. Enhancement effect is usually associated with a specific image, rely on the person's subjective feeling tobe evaluated.引言图像增强是数字图像处理的基本内容之一。
Matlab中的红外图像处理与红外目标探测
Matlab中的红外图像处理与红外目标探测红外图像处理和红外目标探测是当今红外技术领域的核心问题之一。
随着红外技术和红外遥感技术的快速发展和广泛应用,特别是在军事、航空航天、安防等领域,对红外图像处理和红外目标探测的需求日益增加。
在这个背景下,Matlab作为一种功能强大且易于使用的工具,成为了众多研究者和工程师进行红外图像处理和红外目标探测的首选。
一、红外图像处理的基础知识1. 红外图像的获取和特点红外图像是通过红外传感器获取的图像,它能够捕捉到物体表面所散射的红外辐射。
与可见光图像相比,红外图像具有独特的特点。
首先,红外图像可以在夜间或低照度条件下获取清晰的图像。
其次,红外图像能够穿透雾、烟、尘等干扰物,适用于在恶劣环境下的观测和检测。
另外,红外图像还能够反映物体的热分布,对于某些应用具有重要的价值。
2. 红外图像的数字化和增强在进行红外图像处理之前,首先需要将红外图像进行数字化。
数字化的处理将红外图像转化为数字信号,方便计算机进行分析和处理。
同时,数字化还可以对红外图像进行增强,提高图像的质量和清晰度。
在Matlab中,可以利用图像处理工具箱提供的函数对红外图像进行数字化和增强。
3. 红外图像的滤波和去噪由于红外图像通常受到噪声和干扰的影响,常常需要对其进行滤波和去噪处理。
滤波可以去除图像中的高频噪声,提高图像的信噪比。
在Matlab中,可以利用滤波函数,如中值滤波、高斯滤波等对红外图像进行滤波。
同时,去噪处理可以采用小波去噪等算法对红外图像进行降噪,提高图像的质量。
二、红外目标探测的方法1. 基于阈值的目标检测基于阈值的目标检测是一种简单且有效的检测方法。
该方法将图像像素的灰度值与预先定义的阈值进行比较,将高于阈值的像素认定为目标像素。
在Matlab中,可以利用im2bw函数将灰度图像转化为二值图像,再利用基于阈值的方法进行目标检测。
2. 基于模板匹配的目标检测基于模板匹配的目标检测方法是一种更为精确的目标检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外图像的处理及其MATLAB 函数实现0、引言随着红外技术日新月异的发展,红外技术在军事及人们日常生活中有着越来越广泛的应用。
但由于红外探照灯及红外探测器件的限制,红外成像系统的成像效果仍然不够理想。
在民用监测应用中,主要表现为夜视距离近,图像背景与被监测目标之间对比度模糊,被监测目标细节难以辨认,图像特征信息不明确等方面。
为使图像更适于人眼观测、适用于图像后续目标识别及跟踪处理,有必要在红外图像采集与处理上做进一步的研究,来增强红外图像视觉效果。
1、 红外图像的获取及其特点1、1 红外图像的获取红外图像主要就是由红外热像仪采集的。
红外热像仪就是一种二维热图像成像装置。
热成像系统就是一个光学一电子系统,可用于接收波长在m 100~75.0之间的电磁辐射,它的基本功能就是将接收到的红外辐射转换成电信号,再将电信号的大小用灰度等级的形式表示,最后在显示器上显示出来。
图1、1就就是一张采集到的红外图像。
图1、1 输入的红外图像1、2 红外图像的特点红外图像反映了目标与背景不可见红外辐射的空间分布,其辐射亮度分布主要由被观测景物的温度与发射率决定,因此红外图像近似反映了景物温度差或辐射差。
根据其成像原理,总结红外图像特点如下:(1)红外热图像表征景物的温度分布,就是灰度图像,没有彩色或阴影(立体感觉),故对人眼而言,分辨率低、分辨潜力差;(2)由于景物热平衡、光波波长、传输距离远、大气衰减等原因,造成红外图像空间相关性强、对比度低、视觉效果模糊;(3)热成像系统的探测能力与空间分辨率低于可见光CCD阵列,使得红外图像的清晰度低于可见光图像;(4)外界环境的随机干扰与热成像系统的不完善,给红外图像带来多种多样的噪声,比如热噪声、散粒噪声、f1噪声、光子电子涨落噪声等等。
噪声来源多样,噪声类型繁多,这些都造成红外热图像噪声的不可预测的分布复杂性。
这些分布复杂的噪声使得红外图像的信噪比比普通电视图像低;(5)由于红外探测器各探测单元的响应特性不一致等原因,造成红外图像的非均匀性,体现为图像的固定图案噪声、串扰、畸变等。
由以上五点可知,红外图像一般较暗,且目标与背景对比度低,边缘模糊,视觉效果差。
通过以上比较分析,可以总结:可见光图像与红外图像的成像机理虽然不同(可见光图像就是利用物体对光线的反射来获得的,而红外图像就是靠物体自身的红外辐射获取的),但在低照度情况下,可见光图像与红外图像的视觉效果与直方图特征均相同,因此可以采用低照度可见光图像的处理方法来处理红外图像。
2、红外图像的增强2、1 图像增强图像增强就是指对图像的某些特征,如边缘、轮廓、对比度等进行强调或突显,以便于观察或做进一步的分析与处理。
图像增强不意味着能增加原始的信息,有时甚至会损失一些信息,但图像增强的结果却能加强对特定信息的识别能力,便图像中感兴趣的特征得以加强,从而使这些特征的检测与识别变得更加容易。
图像增强方法的分类如图2、1所示:图2、1 图像增强方法下面我们主要介绍其中的几种增强方法。
2、2 红外图像的直方图均衡化2、2、1 图像的直方图灰度直方图就是用于表达图像灰度分布情况的统计图表,有一维直方图与二维直方图之分。
其中最常用的就是一维直方图。
它具有以下三个性质:(1)图像与直方图之间就是多对一的映射关系;(2)只表示图像每一灰度级出现的频数,而失去了具有该灰级的像素的位置信息;(3)一幅图像各子区直方图之与等于该图像的全图直方图。
一幅图像的直方图可以提供下列信息:(1)每个灰度级上像素出现的频数;(2)图像像素值的动态范围;(3)整幅图像的大致平均明暗;(4)图像的整体对比度情况。
因此,在图像处理中直方图就是很有用的决策与评价工具。
直方图统计在对比度拉伸、灰度级修正、动态范围调整、图像灰度调整、模型化等图像处理方法中发挥了很大的作用,在本文后面的讨论中将可以瞧到直方图的重要作用。
比较红外图像与可见光图像的直方图,可以总结其直方图特点如下:(1)像素灰度值动态范围不大,很少充满整个灰度级空间;而可见光图像的像素则分布于几乎整个灰度级空间。
(2)绝大部分像素集中于某些相邻的灰度级范围,这些范围以外的灰度级上则没有或只有很少的像素;而可见光图像的像素分布则比较均匀。
(3)直方图中有明显的峰存在,多数情况下为单峰或双峰,若为双峰,则一般主峰为信号,次峰为噪声;而可见光图像直方图的峰不如红外图像明显,一般多个峰同时存在。
以上特点就是大多数红外图像直方图所具备的,但也不绝对。
实际中的红外图像可能会由于气候条件、环境温度等因素的影响,呈现出与上述特点不完全一致的情形。
图2、2为原红外图像的灰度图与直方图直方图图2、2 原始图像的灰度图与直方图2、2、2 直方图的均衡化直方图均衡的作用就是改变图像中灰度概率分布,使其均匀化.其实质就是使图像中灰度概率密度较大的像素向附近灰度级扩展,因而灰度层次拉开,而概率密度较小的像素灰度级收缩,从而让出原来占有的部分灰度级,这样的处理使图像充分有效地利用各个灰度级,因而增强了图像对比度。
由前一章红外图像特点的分析可知,红外图像普遍存在着灰度级比较集中,层次感差等问题,采用直方图均衡算法来进行处理,可以使其灰度级尽量拉开,从而达到对比度增强的效果。
下面探讨一下直方图均衡的具体步骤。
设一幅图像的像素为n ,共有L 个灰度级,k n 代表灰度级为k r 的像素的数目,则第k 个灰度级出现的概率(对于灰度级为离散的数字图像,用频率来代替概率)可表示为:nn r P k k r =)( 其中,12,1,0,10-=≤≤L k r k Λ。
对其进行均衡化后的函数)(r T 的离散形式可表示为:∑∑=====k i i k r r k nn r P r T S 00)()( 式中,12,1,0,10-=≤≤L k r k Λ。
可见,均衡后各像素的灰度值k S 可直接由原图像的直方图得到。
(a)(b)(c)图2、3 均衡化后的图像对比实验证明,直方图均衡对大多数红外图像有效,效果明显,图像对比度大大增强,原本视觉效果模糊的图像变得清晰,目标的细节得到了突出,方法简单,容易实现,在实践中具有重要意义。
通过以上的理论分析与对具体红外图像的处理,可以得出关于直方图均衡的几个结论:(I)直方图均衡实质上减少灰度等级以换取对比度的加大。
直方图均衡化的处理过程中出现了相邻灰度级合并的现象,即原来直方图上频数较小的灰度级被归入很少几个或一个灰度级内,并且可能不在原来的灰度级上;(2)均衡后的直方图并非完全平坦,这就是因为在离散灰度下,直方图只就是近似的概率密度;(3)当被合并掉的灰度级构成的就是重要细节,则均衡后细节信息损失较大。
因此可采用局部直方图均衡法来处理:(4)在对比度增强处理中,直方图均衡比灰度线性交换、指数、对数变换的运算速度慢,但比空间域处理与变换域处理的速度快。
因此在实时处理中,直方图均衡就是一种常用的方法;(5)直方图均衡虽然增大了图像的对比度,但往往处理后的图像视觉效果生硬、不够柔与,有时甚至会造成图像质量的恶化。
另外,均衡后的噪声比处理前明显,这就是因为均衡没有区分有用信号与噪声,当原图像中噪声较多时,噪声被增强。
2、3 Laplacian 算子锐化算法Laplacian 算子就是线性二次微分算子,具有旋转不变性,可以满足不同走向的图像边界的锐化要求,对于图像),(y x F ,其Laplacian 算子为:22222),(),(),(y y x F x y x F y x F ∂∂+∂∂=∇ Laplacian 算子锐化后的图像具有以下特征:(1)在灰度均匀区间或灰度斜坡部分F 2∇为零,在灰度斜坡的起始处与终点处不为零;(2) F 2∇对细节有较强的相应;正就是由于F 2∇有这些特点,使其可以勾划出图像区域的边缘轮廓。
因此Laplacian算子对边缘检测具有很好的功效。
图2、4 Laplacian算法处理前后图像2、3 中值滤波算法中值滤波就是常用的一种非线性平滑滤波。
它就是一种邻域运算,类似于卷积,但不就是加权求与计算,而就是把邻域中的像素按灰度等级进行排序,然后选择改组的中间值作为输出像素值。
她能减弱或消除傅立叶空间的高频分量,但影响低频分量。
因为高频分量对应图像中的区域边缘与灰度值具有较大变化的部分,因此概率波可以将这些分量滤除,使图像平滑。
其主要原理就是:首先确定一个以某个像素为中心点的邻域,一般为方形领域;然后将邻域中的各个像素的灰度值进行排序,取其中间值作为中心点像素灰度的新值,这里的邻域通常被称为窗口;当窗口在图像中上下左右进行移动后,利用中值滤波算法可以很好地对图像进行平滑处理。
操作步骤如下:(1)将模板在图像中移动,并将模板中心与图像中心某个像素的位置重合;(2)读取模板下各对应像素的灰度值;(3)将这些灰度值从小到大排列成一列;(4)找出排在中间的一个值;(5)将这个中间值赋给对应模板中心位置的像素。
中值滤波的输出像素就是由邻域图像的中间值决定的,因而中值滤波对极限像素值(与周围像素灰度值差别较大的像素)远不如平均值那么敏感,从而可以消除孤立的噪声点,又可以保持图像的细节。
设)f表示数字图像像素点的灰度值,滤波窗口为A的中值滤波器定义x(y,为:)},({),(),(y x G Median y x G Ay x ∈= 中值滤波的优势在于它能够保护图像的边缘信息,而且可以出去图像中含有的无用的图像噪声,通常要求窗宽的一半大于噪声的延续宽度。
中值滤波器的窗口形状与尺寸对滤波影响都很大,在不同的图像内容与不同的要求下,应该采用不同的形状与尺寸。
通常有线性、方形、十字形、圆环形等,而窗口的尺寸由小变大逐步增大点数,直到取得满意的滤波效果。
一般而言,对于变化缓慢的且具有较长轮廓线物体的图像,可采用方形或圆形。
而对于具有尖角物体的图像可采用十字窗口。
图2、5 中值滤波处理前后的图像3、 红外图像的边缘检测3、1 边缘检测边缘检测就是图像处理的重要内容之一,它就是图像分割、目标区域的识别、区域形状特征提取等图像分析的基础。
本节主要介绍边缘检测方法Robert ,Sobel ,ewitt Pr ,)(LOG Gaussian Laplacian -,Canny 与数学形态学法。
3、2 常用的边缘检测方法边缘就是图像的最基本的特征,边缘中包含着有价值的目标边界信息,这些信息可以用作图像分析、目标识别。
常用的检测方法有:(1) Robert 算子Robert 算子就是利用局部查分算子寻找边缘的算子,它就是22⨯算子,对具有陡峭的低噪声图像响应最好,但就是Robert 算子提取边缘的结果边缘较粗,因此边缘定位不很准确。
(2) Sobel算子Sobel算子就是一阶微分算子,它利用像素临近区域的梯度来计算1个像素的梯度,然后根据一定的阈值来取舍,它就是33⨯算子模版,对边缘的定位比较准确,对灰度渐变噪声较多的图像处理的较好。