气动阀门执行器
气动执行器

空滤结构图(摘自SMC说明书)
2.电磁阀
• 电磁阀是用电磁控制的工 动作方式:直动式,先导式
业设备,用在工业控制系
统中调整介质的方向、流 量、速度和其他的参数。
通口数量/位置:3/2,5/2,5/3
电磁阀可以配合不同的电 路来实现预期的控制,而 控制的精度和灵活性都能
安装方式: 板式,集成(阀岛 式)
定位器- 机械喷挡结构(SMC)
定位器- 智能型结构(西门子)
4.锁定阀 (保位阀)
• 气动保位阀又叫气动锁止阀, 保位阀是气动阀门常配附件。 当气源供给压力低于设定压力 时,及时检测压力,能够自动 切断通道的装置。当压缩气源 发生故障停止供气时,利用保位 阀切断阀门控制通道,使阀门 位置保持断气前的位置。以保 证工艺过程的正常进行,直到 系统中事故消除,重新供气后, 保位阀才打开通道,恢复正常 时控制。
气动执行器
王超
气动执行器定义
气动执行器是用气压力驱动启闭或调节阀门的执行装 置,又被称气动执行机构或气动装置,不过一般通俗 的称之为气动头
美国爱诺气动执行器
气动执行器内部结构
气动执行器-分类
• 气动执行器的执行机构和调节机构是统一的 整体,其执行机构有薄膜式、活塞式、拨叉 式和齿轮齿条式。
活塞式
时。阀门处于全开 (FO)或全关(FC) 状态。
• 双作用气动执行器多见 于活塞式气缸,在失去 气源时。阀门可处于保 位(FL)状态。
• 气动薄膜式执行器均为 单作用型式。
根据阀门所处位置的工艺要求,决定使用 何种型式执行器
薄膜式执行器结构示意图
1. 薄膜 2. 弹簧 3. 推杆 4. 弹簧预紧螺栓 5. 行程指示器 6. 支架
拨叉式
气动执行器工作原理

气动执行器工作原理气动执行器是用气压力驱动启闭或调整阀门的执行装置,又被称气动执行机构或气动装置,不过一般通俗的称之为气动头。
气动执行器有时还配备确定的辅佑襄助装置。
常用的有阀门定位器和手轮机构。
阀门定位器的作用是利用反馈原理来改善执行器的性能,使执行器能按掌控器的掌控信号,实现精准的定位。
手轮机构的作用是当掌控系统因停电、停气、掌控器无输出或执行机构失灵时,利用它可以直接操纵掌控阀,以维持生产的正常进行。
一、工作原理当压缩空气从A管咀进入气动执行器时,气体推动双活塞向两端(缸盖端)直线运动,活塞上的齿条带动旋转轴上的齿轮逆时针方向转动90度,阀门即被打开。
此时气动执行阀两端的气体随B管咀排出。
反之,当压缩空气从B官咀进入气动执行器的两端时,气体推动双塞向中心直线运动,活塞上的齿条带动旋转轴上的齿轮顺时针方向转动90度,阀门即被关闭。
此时气动执行器中心的气体随A管咀排出。
以上为标准型的传动原理。
依据用户需求,气动执行器可装置成与标准型相反的传动原理,即选准轴顺时针方向转动为开启阀门,逆时针方向转动为关闭阀门。
单作用(弹簧复位型)气动执行器A管咀为进气口,B管咀为排气孔(B管咀应安装消声器)。
A管咀进气为开启阀门,断气时靠弹簧力关闭阀门。
二、与电动执行器的区分1、从技术性能方面讲,气动执行器的优势紧要包括以下4个方面(1)工作环境适应性好,特别在易燃、易爆、多尘埃、强磁、辐射和振动等恶劣工作环境中,比液压、电子、电气掌控更优越。
(2)动作快速、反应快。
(3)负载大,可以适应高力矩输出的应用(不过,现在的电动执行器已经渐渐达到目前的气动负载水平了)。
(4)行程受阻或阀杆被扎住时电机简单受损。
2、电动执行器的优势紧要包括:(1)不需要对各种气动管线进行安装和维护。
(2)可以无需动力即保持负载,而气动执行器需要持续不断的压力供应。
(3)电动执行器没有“漏气”的不安全,牢靠性高,而空气的可压缩性使得气动执行器的稳定性稍差。
阀门执行器的工作原理
阀门执行器的工作原理1. 引言阀门执行器是一种常见的用于控制流体、气体或液体介质的设备,常见于工业生产、建筑管道和自动化控制系统中。
本文将深入探讨阀门执行器的工作原理,旨在帮助读者更好地理解和运用该设备。
2. 阀门执行器的分类阀门执行器根据其控制方式和工作原理可分为以下几类:电动执行器、气动执行器、液动执行器和手动执行器。
2.1 电动执行器电动执行器通过电动机驱动阀门的开闭操作。
其核心组件是电动机和减速机构,通过电动机的旋转运动将转动力转化为直线运动,并通过连杆和阀杆实现阀门的开闭。
此类执行器广泛应用于自动化程度较高的系统中。
2.2 气动执行器气动执行器使用压缩空气作为动力源,通过气动装置实现阀门的开闭控制。
当控制信号输入时,气动装置会对空气源进行调节,使得阀门执行机构发生相应的运动。
气动执行器具有操作速度快、可靠性高的特点,被广泛应用于工业自动化系统中。
2.3 液动执行器液动执行器与气动执行器的原理相似,唯一的区别在于其动力源是液体。
液动执行器通过液体的压力变化来实现阀门的开闭操作。
液动执行器适用于一些工作环境要求较高的场合,其操作精度和控制能力较强。
2.4 手动执行器手动执行器是一种简单的、体力驱动的阀门执行器。
其操作方式是通过手动操作来实现阀门的开闭控制。
手动执行器没有动力源,通常适用于一些较小的系统或安全控制方面的需求。
3. 阀门执行器的核心组件无论是什么类型的阀门执行器,其核心组件通常包括以下几个部分:电动机或气动装置、减速机构、连杆、阀杆和阀门本身。
3.1 电动机或气动装置电动执行器依靠电动机提供动力,气动执行器则需要气动装置作为动力源。
电动机通常采用交流电动机或直流电动机,其类型和功率取决于执行器的要求和应用场景。
气动装置则通常由空气压缩机、气动阀和气缸组成。
3.2 减速机构减速机构是将电动机或气动装置的旋转运动转化为阀门执行机构所需的直线运动的核心装置。
减速机构通常采用齿轮传动、蜗轮传动、滑移轮传动等形式,其目的是将动力传递到连杆上。
气动阀门执行器的工作原理
气动阀门执行器的工作原理嘿,朋友们!今天咱来聊聊气动阀门执行器这玩意儿的工作原理。
你说这气动阀门执行器啊,就像是一个勤劳的小工人,默默在各种管道系统里工作着。
它主要靠啥呢?靠压缩空气!就像人吃饭有力气干活一样,压缩空气就是它的“动力大餐”。
当压缩空气进入到这个小家伙的身体里,它就开始活动起来啦。
它能根据设定好的指令,要么把阀门打开,要么把阀门关上,精准得很呢!这就好像你让小狗去把球捡回来,它就能乖乖地执行你的命令一样。
想象一下,在那些工厂的大管道里,气动阀门执行器就那么稳稳地待着,随时准备听从指挥。
它可不会偷懒哦,只要有需要,它就会迅速响应。
而且它还挺耐用的,不像有些东西用着用着就出毛病了。
它的工作原理其实并不复杂,但却超级重要呢!要是没有它,那些管道里的流体不就乱套啦?就像没有交警指挥的十字路口,那还不得堵成一锅粥啊!它就像一个幕后英雄,默默地保障着一切的顺利运行。
你看,气动阀门执行器虽然看起来不怎么起眼,但在很多行业里可都是不可或缺的呢!从石油化工到食品加工,哪里都有它的身影。
它就像一个忠诚的卫士,守护着管道系统的安全和稳定。
它工作起来也挺有趣的,压缩空气一来,它就开始动啦,“噗噗”地把阀门打开或者关上。
有时候我都觉得它像个在跳机械舞的小机器人,可有意思啦!而且它还特别可靠,一般情况下都不会出啥问题,让人特别放心。
所以说啊,别小看了这小小的气动阀门执行器,它可是有着大作用呢!它就像我们生活中的那些平凡却又不可或缺的存在,虽然不引人注目,但却默默地为我们的生活和工作提供着保障。
大家说是不是很神奇呢?总之,气动阀门执行器就是这么一个厉害又有趣的东西,大家可一定要记住它哦!。
气动执行器(电动执行器)工作原理
气动执行器(电动执行器)工作原理气动执行器与电动执行器都是用在阀门上的执行机构,我们很常见的电动球阀电动阀门电动蝶阀这些都是内置了电动执行器。
而气动球阀气动蝶阀气动阀门上呢?都是使用的气动执行器,所有我们能够很好的分辩阀门上使用的执行器,呵呵!下面我们就来详细的介绍动执行器(电动执行器)的工作原理。
气动执行机构采用活塞式气缸及曲臂转换结构,输出力矩大,体积精小。
执行机构采用全密封防水设计防护等级高。
气缸体采用进口镜面气缸,无油润滑、摩擦系数小、耐腐蚀、具有超强的耐用性及可靠性,所有传动轴承均采用边界自润滑轴承无油润滑,确保传动抽不磨损。
气动执行器在工作时,将空气由A工作孔输入,气缸内气压推动活塞向两边移动,输出轴逆时针旋转,带动阀门实现启闭操作。
压缩空气由B工作孔输入,气缸内气压推动活塞向中心靠拢,输出轴逆时针旋转,带动阀门实现启闭操作。
这就是气动执行器的工作原理,我可以看出气动执行器在工作时能够快速的使得气缸内的旋转。
下面我们对气动执行器与一个详细的介绍,在下面的介绍我们会从多角度的阐述。
气动执行器1、紧凑的双活塞齿轮齿条机构,灵活轻巧的双活塞连杆机构,角行程输出。
2、缸体材料为压铸铝合金(铝合金采用硬质阳极氧化耐磨、防腐蚀、寿命长)。
3、气源:过滤、干燥或加油润滑的洁净空气,最小压0.1 MPa,最大压力1MPa。
4、内表面的特殊处理保证最小摩擦及长久寿命。
5、采用低摩擦材料制成的滑动装置,避免了金属与金属的直接接触。
6、底面固定孔便于执行器与阀连接并使其对正,符合ISO5211/DIN3337标准。
气动执行器在工作时紧凑的双活塞齿轮齿条机构,灵活轻巧的双活塞连杆机构,角行程输出。
而缸体材料为压铸铝合金(铝合金采用硬质阳极氧化耐磨、防腐蚀、寿命长)。
气动执行器的内表面的特殊处理保证最小摩擦及长久寿命。
气动执行器供气孔符合NAMUR标准或符合NAMUR标准的转接板。
气动执行器行程调整:在0°、90°位置有±4°的可调范围。
气动执行器与气动阀门
气动阀门和气动执行器是什么?以及它的用途和原理气动阀门和气动执行器在焊接前投产前以及投产后的阀门专业养护工作,为阀门服务于生产运营中起着至关重要的作用,正确和有序有效的维护保养会保护阀门,使阀门正常发挥功能并且延长气动阀门和气动执行器使用寿命。
阀门养护工作看似简单,其实不然。
工作中常有被忽视的方面。
第一、气动阀门和气动执行器注脂时,常常忽视注脂量的问题。
注脂枪加油后,操作人员选择阀门和注脂联结方式后,进行注脂作业。
存在着二种情况:一方面注脂量少注脂不足,密封面因缺少润滑剂而加快磨损。
另一方面注脂过量,造成浪费。
在于没有根据气动阀门和气动执行器类型类别,对不同的阀门密封容量进行精确的计算。
可以以阀门尺寸和类别算出密封容量,再合理的注入适量的润滑脂。
第二、气动阀门和气动执行器注脂时,常忽略压力问题。
在注脂操作时,注脂压力有规律地呈峰谷变化。
气动阀门和气动执行器压力过低,密封漏或失效,压力过高,注脂口堵塞、密封内脂类硬化或密封圈与阀球、阀板抱死。
通常注脂压力过低时,注入的润滑脂多流入阀腔底部,一般发生在小型闸阀。
而注脂压力过高,一方面检查注脂嘴,如是脂孔阻塞判明情况进行更换;另一方面是脂类硬化,要使用清洗液,反复软化失效的密封脂,并注入新的润滑脂置换。
此外,密封型号和密封材质,也影响注脂压力,不同的密封形式有不同的注脂压力,一般情况硬密封注脂压力要高于软密封。
第三、气动阀门和气动执行器注脂时,注意阀门在开关位的问题。
球阀维护保养时一般都处于开位状态,特殊情况下选择关闭保养。
其他阀门也不能一概以开位论处。
闸阀在养护时则必须处于关闭状态,确保润滑脂沿密封圈充满密封槽沟,如果开位,密封脂则直接掉入流道或阀腔,造成浪费。
第四、气动阀门和气动执行器注脂时,常忽略注脂效果问题。
注脂操作中压力、注脂量、开关位都正常。
但为确保阀门注脂效果,有时需开启或关闭阀门,对润滑效果进行检查,确认阀门阀球或闸板表面润滑均匀。
第五、注脂时,要注意阀体排污和丝堵泄压问题。
气动控制阀执行器安全操作及保养规程

气动控制阀执行器安全操作及保养规程气动控制阀执行器是工业生产中常用的一种控制装置,它能够自动控制流体介质的流量、压力等参数。
在使用气动控制阀执行器时,为了确保操作的安全和系统的正常运行,需要遵循一定的操作规程和保养要求。
一、安全操作1. 操作前的准备工作在开展操作前需要做好以下准备工作:1.确保气源正常。
开动气源,确保其正常工作,检查压力是否符合阀门执行器的设定值。
2.检查执行器和阀门的安装。
检查执行器和阀门的连接是否牢固,防止因连接不良而导致闸板卡死或是进出口孔被堵塞。
3.检查阀门的位置。
检查阀门的位置是否正确,确保阀门在允许范围内。
防止因操作时阀门位置不当而导致操作错误,损坏执行器或阀门。
2. 操作时的注意事项在开展操作时需要注意以下事项:1.避免过载。
应根据执行器的额定扭矩和阀门的实际工作情况,选择合适的执行器。
2.避免过分拉伸。
应根据执行器的钢丝绳控制长度,避免过分拉伸或缩短,确保操作顺畅。
3.避免颤振。
在操作时要避免过度振动,可以通过合理控制气源压力、降低执行器的控制速度等方式来避免颤振。
4.确保通气口畅通。
在操作时应确保执行器通气口畅通,防止一些因脏物积累而导致执行器内部通气阻塞的问题。
5.避免异常腐蚀。
在操作现场应该避免因外部环境的过度腐蚀导致执行器和阀门等部件异常腐蚀,影响设备的使用寿命。
3. 操作后的处理在操作完成后,需要做好以下处理工作:1.保持设备清洁。
清理设备表面及周围环境杂物,保持设备的干净整洁,防止污染和危险事件的发生。
2.关闭气源。
关闭气源,避免因操作错误或是其他因素造成系统失控,造成设备或是人员伤害。
3.定期检查。
定期检查设备的工作状态及连接件的是否靠紧,避免出现设备脱落、松动等安全隐患。
4.及时维护。
当出现设备磨损、故障等问题时,应及时进行维护保养,更换零部件,避免降低设备的工作效率和安全性。
二、保养规程在日常维护保养中,需要注意以下几个方面:1. 定期清洁定期清洁气动控制阀执行器及其周围环境,防止污物沉积堆积,坚持清洁操作可以防止腐蚀和氧化等问题,同时保护执行器某些精密部件,防止磨损。
气动阀门执行器原理
气动阀门执行器原理
气动阀门执行器是一种常用的工业执行器,主要用于控制阀门的开启和关闭。
它的工作原理可以简单概括为以下几个步骤:
1. 气源供给:气动阀门执行器需要通过气源来提供动力。
一般情况下,执行器会连接到气源系统中,通过管道输送气体至执行器。
2. 控制气压:执行器内部有一个气压控制系统,可以控制阀门的开启和关闭。
通过改变气源的压力,可以调节执行器的工作状态。
3. 活塞运动:执行器内部有一个活塞,通过气压的作用使活塞上下运动。
当气压作用在活塞的一侧时,活塞向另一侧移动,实现阀门的开启或关闭。
4. 连接阀门:执行器通过机械装置与阀门相连接,使得活塞的运动可以转化为阀门的运动。
当活塞向上移动时,阀门打开;当活塞向下移动时,阀门关闭。
5. 反馈信号:为了控制阀门的位置,执行器通常会配备反馈装置,用于监测阀门位置并向控制系统反馈信息。
通过反馈信号,控制系统可以实时监控和调节阀门的工作状态。
总结来说,气动阀门执行器通过气源供给、控制气压、活塞运动、连接阀门和反馈信号等步骤,实现对阀门的精确控制。
它在工业领域中被广泛应用,具有快速响应、可靠性高等特点。
阀门气动执行器工作原理 气动执行器技术指标
阀门气动执行器工作原理气动执行器技术指标阀门气动执行器概述:气动执行器(即通常所说的气动头)又称气动执行机构或气动装置,是利用压缩空气的气源压力来驱动启闭或调整阀门的执行装置,紧要由气缸、活塞、齿轮轴、端盖、密封件、螺丝等构成。
气动执行器一般与各类阀门配套使用,其中还包括开度指示、行程限位、电磁阀、定位器、气动元件、手动机构、信号反馈等部件构成。
阀门的开,关,开多少,关多少,均用压缩空气来进行掌控。
阀门气动执行器工作原理:气动执行器依据作用形式可分为单作用和双作用,双作用执行器表现为气开气关式,即通气打开,通气关闭,失去气源时,无动作,停留原位。
而单作用执行器具有弹簧复位的功能,一般有常闭型和常开型,即通气打开,失去气源时,自动复位到初始状态。
在不安全的工况中使用较多,可在失去气源货显现突发故障时,将阀门快速关闭或打开。
当气源压力从气口(2)进入气缸两活塞之间中腔时,使两活塞分别向气缸两端方向移动,两端气腔的空气通过气口(4)排出,同时使两活塞齿条同步带动输出轴(齿轮)逆时针方向旋转。
反之气源压力从气口(4)进入气缸两端气腔时,使两活塞向气缸中心方向移动,中心气腔的空气通过气口(2)排出,同时使两活塞齿条同步带动输出轴(齿轮)顺时针方向旋转。
(假如把活塞相对反方向安装,输出轴即变为反向旋转)当气源压力从气口(2)进入气缸两活塞之间中腔时,使两活塞分别向气缸两端方向移动,迫使两端的弹簧压缩,两端气腔的空气通过气口(4)排出,同时使两活塞齿条同步带动输出轴(齿轮)逆时针方向旋转。
在气源压力经过电磁阀换向后,气缸的两活塞在弹簧的弹力下向中心方向移动,中心气腔的空气从气口(2)排出,同时使两活塞齿条同步带动输出轴(齿轮)顺时针方向旋转。
(假如把活塞相对反方向安装,弹簧复位时输出轴即变为反向旋转)电动执行器与气动执行器的区分电动执行器紧要应用于动力厂或核动力厂,由于在高压水系统需要一个平滑、稳定和缓慢的过程。
阀门气动执行器上的工作原理
阀门气动执行器上的工作原理一、引言气动执行器是工业自动化控制系统中常用的执行机构,广泛应用于各种管道、容器和设备上。
气动执行器包括气缸、旋转执行器和阀门执行器等类型,其中阀门气动执行器是最为常见的一种。
本文将详细介绍阀门气动执行器的工作原理。
二、阀门气动执行器的组成阀门气动执行器主要由以下几个部分组成:1. 气缸:负责将压缩空气转换为机械能,推动活塞实现开关阀门;2. 阀体:安装在管道或设备上,通过旋转或升降来控制流体的通断;3. 连杆:将气缸和阀体连接起来,传递力量;4. 位置反馈装置:用于检测阀门的开闭状态,并将信号反馈给控制系统。
三、工作原理1. 初始状态当阀门处于关闭状态时,气缸处于伸出状态(即活塞向外伸出),此时连杆与阀体连接处于最低点,并且位置反馈装置也会相应地反馈信号。
2. 开启过程当控制系统发出开启指令时,气源进入气缸的A腔,推动活塞向内缩进,连杆也随之向上移动。
连杆在移动的过程中,通过与阀体连接的轴承使阀体旋转。
当阀体旋转到一定角度时,流体开始通畅地流过管道或设备。
3. 关闭过程当控制系统发出关闭指令时,气源进入气缸的B腔,推动活塞向外伸出,连杆也随之向下移动。
连杆在移动的过程中,通过与阀体连接的轴承使阀体旋转。
当阀体旋转到一定角度时,流体被完全切断。
4. 位置反馈位置反馈装置会检测阀门的开闭状态,并将信号反馈给控制系统。
控制系统可以根据反馈信号调整气源压力大小和方向来实现对阀门开闭状态的精确控制。
四、总结以上就是阀门气动执行器的工作原理。
通过控制气源压力和方向来驱动活塞实现开关阀门,并且通过位置反馈装置来检测阀门状态并进行精确控制。
在实际应用中,需要根据具体的工艺要求和管道设备的特点来选择合适的阀门气动执行器,以达到最佳的控制效果。
气动执行器
AW系列气动执行器一、产品[AW系列气动执行器]概述:1、AW气动执行器分为双作用式和单作用式(弹簧复位),两个分体气缸,容易制造大尺寸缸体。
满足各种大型旋转类阀门的需求。
2、输出扭矩大,动作灵活平稳;缸体内壁和活塞轴镀硬铬,具有很好的抗磨性;所有滑动部件之间配有无油润滑轴和导向环以降低摩擦系数,延长使用寿命,AW气动执行器的U型曲线特性输出扭矩更适用于大口径球阀、蝶阀。
3、回转角度:双作用式=90°,单作用式=90°从两端可调节角度±5°4、工作环境温度:-20~90℃。
5、气源:过滤、干燥或加润滑油的洁净空气,最小气压0.4MPa,最大气压1.0MPa。
6、基本设计:气动双气缸双活塞拔叉传动机构。
型号AWxx=双作用式;型号AWxxS=单作用式(弹簧复位)。
7、强大的附件功能:可配单(双)电控电磁阀、限位开关回讯器、电气位器、气源处理三联件以及手动操作机构,完全实现自动或手动控制。
二、AW系列双作用气动执行器输出扭矩表:三、AWS系列单作用气动执行器输出扭矩表:四、AW/AWS系列执行器安装尺寸:订货须知:一、①AW系列气动执行器产品名称与型号②AW系列气动执行器口径③AW系列气动执行器是否带附件二、若已经由设计单位选定公司的AW系列气动执行器型号,请按AW系列气动执行器型号三、当使用的场合非常重要或环境比较复杂时,请您尽量提供设计图纸和详细参数,相关产品:回转式电动执行机构PS电子式电动执行器3810系列角行程电动执行器防爆电动执行机构直行程电动执行机构直行程电动执行器VA3000超小型直行程电动头智能阀门定位器(机外型)阀门定位器PS电子式阀门执行机构PS电子式执行机构空气过滤减压阀智能阀门定位器部分回转阀门电动装置多弹簧气动薄膜执行机构电气阀门定位器气动执行器信号反馈开关防爆限位开关气动三联件多回转阀门电动装置其它阀系列价格供用户或设计院工程项目做预算管夹阀价格表口径手动电动DN50 450 1350 DN65 690 1575 DN80 1020 3375 DN100 1500 4050 DN125 1950 4500 DN150 **** **** DN200 4350 8400 DN250 7050 9750 DN300 12450 17700 DN350 21450 71700 DN400 29250 35400电动二通阀价格名称型号通径价格三速温控开关液晶显示温控开关大中小电动二通阀VA7010DN15 87 37.5 78 75 72DN20 87 37.5 78 75 72(风机管盘)1.6mpa≤180℃DN25 127.5 37.5 78 75 72HYDF1.6mpa≤120℃DN15 97.5 34.5 78 75 72DN20 97.5 34.5 78 75 72DN25 127.5 34.5 78 75 72名称通径价格电动二通阀配套驱动器,传感器,变压器,温度控制器DN25 600 DN32 630 DN40 675 DN50 720 DN65 1125 DN80 1575 DN100 1725 DN125 2100 DN150 23400 DN200 3450 DN250 5250 DN300 7800 DN350 9750 DN400 12900产品名称通径DN工作压力(mpa)1.6(Z)2.5(c)Y416XY110X 减压稳压阀25/110 225 270 32/110 285 345 40/110 315 382.5 50/110 345 42050 585 70565 630 75080 757.5 900 100 915 1095 125 1470 1770 150 1800 21750JM744X气动,液动快开排80 825 990 100 900 1080 125 1575 1890泥阀150 **** ****200 1950 2340250 3150 3780300 4650 5580产品名称公称通径工作压(mpa)1.0/1.6CARX 复合式排气阀DN20DN25DN32DN40 507 DN50 507 DN65 591 DN80 637.5 DN100 675 DN125 862.5 DN150 1125 DN200 2250产品名称公称通径工作(mpa)1.0/1.6排气阀DN40 216 DN50 216 DN65 262.5 DN80 300 DN100 328.5 DN125 337.5 DN150 394.5 DN200 694.5 DN250 1125 DN300 1500 DN350底阀价格底阀H42F-6P口径4Ni 8Ni 普料DN15DN20DN25DN32DN40 172.5 217.5 135 DN50 240 277.5 150 DN65 315 382.5 210 DN80 457.5 517.5 277.5 DN100 525 570 307.5 DN125 720 900 540 DN150 **** ****.5 757.5 DN200 1650 2182.5 1140 DN250 2400 2775 1650 DN300 3450 3975 2625型号口径单位单价(元)双门底阀DN40 只255 DN50 只300 DN80 只495电动二通阀价格名称型号通径价格三速温控开关液晶显示温控开关大中小电动二通阀(风机管盘)VA70101.6mpa≤180℃DN15 87 37.5 78 75 72DN20 87 37.5 78 75 72DN25 127.5 37.5 78 75 72 HYDF1.6mpa≤120℃DN15 97.5 34.5 78 75 72DN20 97.5 34.5 78 75 72DN25 127.5 34.5 78 75 72名称通径价格电动二通阀配套驱动器,传感器,变压器,温度控制器DN25 600 DN32 630 DN40 675 DN50 720 DN65 1125 DN80 1575 DN100 1725 DN125 2100 DN150 23400 DN200 3450 DN250 5250 DN300 7800 DN350 9750 DN400 12900呼吸阀阻火器价格型号呼吸阀GFQ-2 阻火呼吸阀ZFQ-1 呼吸阀QZF-89 口径铸钢不锈钢铸钢不锈钢铸钢不锈钢DN25 187.5 450 255 502.5 //DN32 262.5 585 315 675 //DN40 277.5 660 330 705 //DN50 315 727.5 360 795 765 1905 DN65 397.5 922.5 465 1125 1005 2505 DN80 465 1170 555 1327.5 1080 2760 DN100 585 1417.5 705 1590 1215 3120 DN125 727.5 2100 915 2280 2085 4485 DN150 952.5 2415 1125 2670 2715 5880 DN200 1425 3367.5 1635 3795 3135 8625 DN250 1897.5 4560 2250 5355 4485 11115 DN300 3360 6555 3825 7905 5700 15015型号管道阴火器GYW-1 管道阻火器GZW-1 阻火器ZGB-1 口径铸钢不锈钢铸钢不锈钢铸钢不锈钢DN25 210 420 240 555 210 420 DN32 285 675 315 900 255 570 DN40 315 765 345 1005 270 600 DN50 360 870 390 1170 315 690DN65 420 1125 465 1635 345 840 DN80 555 1380 600 1815 450 1035 DN100 660 1635 720 2250 555 1305 DN125 810 2325 1005 3795 660 1980 DN150 **** **** 1350 4830 915 2325 DN200 1635 4320 1980 6645 1290 3150 DN250 2325 5865 2670 9495 1635 4395阻火透气帽公称通径铝合金铸钢不锈钢单价(元)单价(元)DN40 105 150 420 DN50 105 195 450 DN80 210 375 780 DN100 345 450 990 DN150 825 810 1635 DN200 1020 1065 2595型号公称通径铸钢不锈钢单价(元)单价(元)网型阻火器HGS一07DN25 382.5 570 DN40 630 1050 DN50 697.5 1125 DN65 900 1695 DN80 1035 1905 DN100 1417.5 2505 DN150 **** **** DN200 4050 7245 DN250 4275 10530 DN300 6007.5 13455管道砾石阻火器口径DN25 DN50 0N65 DN80 DN100 DN150 铸钢375 600 690 780 1080 1635流量计价格名称通径价格LDE智能型DN15 3300电磁流量计DN20 3300 DN25 3300 DN32 3450 DN40 3450 DN50 3450 DN65 3450 DN80 3450 DN100 3600 DN125 3750 DN150 4050 DN200 4800 DN250 5700 DN300 7200 DN350 7800 DN400 9300 DN500 10800 DN600 13500 DN700 16500 DN800 21750 DN900 24750 DN1000 28500 DN1200 36000名称通径价格涡街流量计DN25 3450 DN32 3525 DN40 3600 DN50 3750 DN65 3900 DN80 4275 DN100 4500 DN125 5250 DN150 6300 DN200 8250 DN250 9750 DN300 11700水处理器价格多功能微电子水处理器DN20 1125 DN25 1125 DN32 1200 DN40 1200 DN50 1200 DN65 1275 DN80 1350 DN100 1500 DN125 1650 DN150 1875 DN200 2400 DN250 3000 DN300 3600 DN350 4200 DN400 5700 DN450 6750 DN500 8400 DN600 9000 DN700 12750 DN800 16500 DN900 21000 DN1000 24750名称通径价格内磁水处理器DN25 1500 DN32 1650 DN40 1725 DN50 1950DN6522502550 DN80 2550 DN100 3000 DN125 3750 DN150 4350 DN200 5700DN250 7350DN300 8700DN400 11250DN500 14250DN600 18000 橡胶接头价格KXT(JGD)可曲挠橡胶接头规格单球单球翻边单球翻边双球变径球l.OMPa 1.6MPa 2.5MPa l.OMPa 1.6MPa 1.OMPa规格型号1.OMPa DN25 61.5 61.5 118.5DN32 99 99 165 65×50 313.5 DN40 108 108 174 111 80×65 394.5 DN50 115.5 115.5 214.5 120 165 100×65 435 DN65 151.5 151.5 280.5 162 202.5 100×80 472.5 DN80 169.5 169.5 313.5 175.5 250.5 100×125 571.5 DN100 198 198 346.5 208.5 292.5 100×150 708 DN125 300 300 561 334.5 442.5 125×150 708 DN150 351 351 750 417 457.5 538.5 200×100 1170 DN200 487.5 544.5 1125 624 690 703.5 200x125 1170 DN250 646.5 792 1560 867 952.5 1056 200x150 1170 DN300 888 1015.5 2205 1224 1350 1287 250×125 1497 DN350 1023 1270.5 2352 1306.5 1440 2118 250×150 1497 DN400 1339.5 1639.5 3255 1809 1995 2178 250×200 1497 DN450 1617 2178 4200 22885.5 2565 0 300X200 1665 DN500 1815 2722.5 5460 3033 3337.5 4290 300×250 1665 DN600 2392.5 8070 4483.5 4935 6154.5 350X200 1873.5KXT(JGD) 可曲挠橡胶接头规格单球单球翻边单球翻边双球变径球l.OMPa 1.6MPa 2.5MPa l.OMPa 1.6MPa 1.OMPa规格型号1.OMPaDN700 3157.5 9892.5 5494.5 6045 7590 350*300 1873.5 DN800 4290 12022.5 6679.5 7350 8745 400*300 2068.5 DN900 5313 7986 8790 0 400*350 2236.5 DN1000 6135 9438 10380 12243 1200*800 32670DN1100 82500 备注以上产品橡胶为天然胶, 法兰锻钢。
气动阀门执行器的控制方式及工作原理
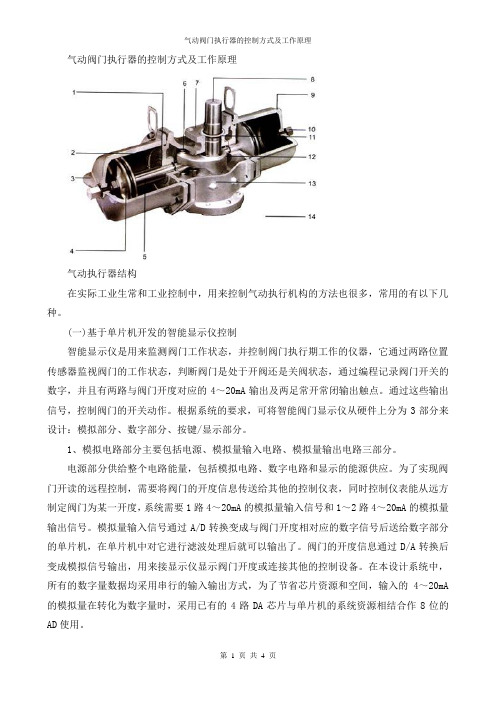
气动阀门执行器的控制方式及工作原理气动执行器结构在实际工业生常和工业控制中,用来控制气动执行机构的方法也很多,常用的有以下几种。
(一)基于单片机开发的智能显示仪控制智能显示仪是用来监测阀门工作状态,并控制阀门执行期工作的仪器,它通过两路位置传感器监视阀门的工作状态,判断阀门是处于开阀还是关阀状态,通过编程记录阀门开关的数字,并且有两路与阀门开度对应的4~20mA输出及两足常开常闭输出触点。
通过这些输出信号,控制阀门的开关动作。
根据系统的要求,可将智能阀门显示仪从硬件上分为3部分来设计:模拟部分、数字部分、按键/显示部分。
1、模拟电路部分主要包括电源、模拟量输入电路、模拟量输出电路三部分。
电源部分供给整个电路能量,包括模拟电路、数字电路和显示的能源供应。
为了实现阀门开读的远程控制,需要将阀门的开度信息传送给其他的控制仪表,同时控制仪表能从远方制定阀门为某一开度,系统需要1路4~20mA的模拟量输入信号和1~2路4~20mA的模拟量输出信号。
模拟量输入信号通过A/D转换变成与阀门开度相对应的数字信号后送给数字部分的单片机,在单片机中对它进行滤波处理后就可以输出了。
阀门的开度信息通过D/A转换后变成模拟信号输出,用来接显示仪显示阀门开度或连接其他的控制设备。
在本设计系统中,所有的数字量数据均采用串行的输入输出方式,为了节省芯片资源和空间,输入的4~20mA 的模拟量在转化为数字量时,采用已有的4路DA芯片与单片机的系统资源相结合作8位的AD使用。
2、数字电路部分主要包括:单片机、掉电保护、两路监测脉冲输入信号、两路常开常闭转换触点输出。
在设计方案中选用目前普遍使用的51系列单片机AT89C4051。
AT89C4051是一款低电压、高性能的CMOS8位微控制器,它具有4K字节的可擦除、可重复编程的只读闪存。
通过在单芯片内复合一个多功能的8位CPU闪存,在性能、指令设定和引脚上与80C51和80C52完全兼容。
阀门控制系统气动执行器、电动执行器及执行机构术语解析
阀门控制系统气动执行器、电动执行器及执行机构术语解析一、总则:1、执行器是智能阀门控制系统中必不可少的一个重要组成部分。
2、它的作用是接受控制器送来的控制信号,改变被控介质的流量,从而将被控变量维持在所要求的数值上或一定的范围内。
3、执行器按其能源形式可分为气动、液动、电动三大类。
4、气动执行器用压缩空气作为能源,其特点是结构简单、动作可靠、平稳、输出推力较大、维修方便、防火防爆,而且价格较低,因此广泛地应用于化工、造纸、炼油等生产过程中,它可以方便地与被动仪表配套使用。
5、即使是使用电动仪表或计算机控制时,只要经过电-气转换器或电气阀门定位器将电信号转换为20-100kPa的标准气压信号,仍然可用气动执行器。
6、电动执行器的能源取用方便,信号传递迅速,但结构复杂、防爆性能差。
7、液动执行器在化工、炼油等生产过程中基本上不使用,它的特点是输出推力很大。
二、执行器基本术语:1、执行器「终端控制元件]。
控制系统正向通路中直接改变操纵变量的仪表,由执行机构和调节机构组成。
2、控制阀[调节阀]。
过程控制系统中用动力操作去改变流体流1t的装置,由执行机构和阀组成,执行机构按照控制信号改变阀内截派件的位置。
3、电磁阀。
利用线圈通电激磁产生的电磁力来驱动阀芯开关的阀。
4、自力式调节阀。
无籍外部动力,只依靠被控流体的能夏自行操作并保持被控变量恒定的闷。
5、调节机构。
由执行机构驱动,直接改变操纵变量的机构。
6、阀。
内含控制流体流量用的截流件的压力密封壳体组件。
7、执行机构。
将控制信号转换成相应的动作以控制闷内截流件的位置或其他调节机构的装置。
信号或驱动力可为气动、电动、液动的或此三者的任惫组合。
8、气动执行机构。
利用有压气体作为动力源的执行机构。
9、电动执行机构。
利用电作为动力源的执行机构。
10、液动执行机构。
利用有压液体作为动力源的执行机构。
11、电液执行机构。
接受电信号并利用有压液体作为动力源的执行机构。
12、执行机构动力部件。
气动阀门执行器的控制方式

气动阀门执行器的控制方式常见的气动阀门执行器的控制方式包括:1.手动控制:手动控制方式是最基本的控制方式,由操作人员通过手动装置来调节阀门的开闭。
这种方式操作简单直观,但不适用于长时间的自动化控制。
2.自动控制:自动控制是指通过自动化控制系统对阀门执行器进行控制。
根据不同的控制需求,可以采用不同的控制模式,例如:开关控制、模拟控制、二位控制、调节控制等。
-开关控制是最简单的一种控制模式,通过控制信号的开关,将气动能量传递给阀门执行器,实现阀门的开闭。
开关控制一般用于只需要简单的开关动作的场合。
-模拟控制是通过模拟信号来控制阀门执行器的位置或速度。
模拟信号可以是电流信号、电压信号或压力信号等,通过调节信号的大小来控制阀门的位置或速度。
-二位控制是一种常用的控制模式,通过两个位置控制信号,分别控制阀门的开和关。
在开和关两个位置之间,阀门执行器会保持当前的状态。
二位控制适用于只有开和关两种状态的场合。
-调节控制是一种更为复杂的控制模式,可以根据系统需求来调节阀门的开度。
调节控制通常采用模拟信号进行控制,可以实现阀门的精确调节,适用于需要精密控制的场合。
3.位置反馈控制:位置反馈是指通过传感器来实时检测阀门执行器当前的位置,并将位置信息反馈给控制系统。
根据不同的位置反馈信号,可以实现闭环控制和开环控制两种方式。
-闭环控制是根据真实位置与目标位置之间的差异来调整控制信号,实现精确控制。
闭环控制通常适用于对阀门控制要求较高的场合。
-开环控制是一种基于设定值和输入信号的预设模式,不需要实时反馈阀门位置,使用较为简单,但控制精度较低。
开环控制适用于对阀门控制要求不高的场合。
4.工艺控制:工艺控制是指根据生产工艺需求来控制阀门过程,通常需要与上位调度系统或流程控制系统进行联动控制。
工艺控制可以根据生产工艺的要求进行编程,实现自动化的过程控制。
-上位调度系统在生产线或工艺过程的最高层进行控制,可以实现对阀门执行器的远程监控和控制。
气动执行器工作原理

气动执行器工作原理气动执行器是工业自动化控制中常用的一种执行元件,广泛应用于阀门、门窗、机械臂等设备的控制系统中。
它通过利用气动能的转换,将气动信号转化为机械运动,实现对被控制对象的控制。
下面将详细介绍气动执行器的工作原理。
一、工作原理概述气动执行器主要由气压装置、执行机构和位置检测装置三部分组成。
其中,气压装置通过调节和控制气源的气压大小,向执行机构提供所需的气动能。
执行机构接收来自气压装置的气源,通过气缸、齿轮传动或者曲柄连杆机构等方式,将气动信号转化为机械动作。
位置检测装置则用于检测执行机构的位置,并反馈给控制系统,以实现闭环控制。
二、气压装置气压装置是气动执行器的基础部分,它主要包括气源供给、气路控制以及压力调节等功能。
气源供给是气动执行器正常工作的前提,一般采用空气压缩机或者气瓶提供稳定的气源。
气路控制则是控制气流进出执行机构的方式,常见的有双位控制、三位控制和四位控制等。
压力调节则是根据实际需要,通过调整气压大小来控制执行机构的运动速度和力度。
三、执行机构执行机构是气动执行器的核心组成部分,它根据气动信号的输入,将气源转化为机械运动。
常见的执行机构有气缸、气动旋转执行器、气动隔膜执行器等。
其中,气缸是最常见的一种执行机构,它通常由气缸筒、活塞、密封件和连接杆等部分组成。
当气动信号输入时,气源通过气缸筒进入气缸内部,使活塞做往复运动,从而实现对被控制对象的位移或者力的控制。
四、位置检测装置位置检测装置常用于对执行机构位置的检测以及反馈,以实现对执行机构运动过程的闭环控制。
常见的位置检测装置有行程开关、位置传感器等。
行程开关是一种机械式位置检测装置,当执行机构到达设定位置时,行程开关被触发,产生信号反馈给控制系统。
位置传感器则是一种电子式位置检测装置,能够实时感知执行机构的位置,并将信号转化为电信号反馈给控制系统。
五、工作原理示意图(在这里可以插入一张气动执行器的工作原理示意图,图中可以清晰地展示各个部分的组成和工作过程,有助于读者更好地理解)在实际应用中,气动执行器通常与控制系统相结合,实现对被控制对象的精确控制。
阀门气动执行器上的工作原理
阀门气动执行器上的工作原理一、介绍阀门气动执行器阀门气动执行器是一种常见的用于控制阀门的设备,广泛应用于工业领域。
它通过气动推力来操作阀门的开闭,具有结构简单、操作可靠等优点。
本文将详细讨论阀门气动执行器的工作原理。
二、阀门气动执行器的组成阀门气动执行器通常由以下几个部分组成:1.气动执行机构:气动执行机构是阀门气动执行器的核心部件,用于实现气动推力的产生和传递。
它一般由气缸和活塞组成,通过气源提供的压缩空气推动活塞运动,从而实现阀门的开闭。
气缸的结构形式有多种,常见的有活塞式气缸和薄膜式气缸。
2.位置反馈装置:位置反馈装置用于检测阀门的开闭状态并将信号反馈给控制系统。
一般情况下,位置反馈装置采用接近开关或者行程开关,通过检测活塞的位置来确定阀门的状态。
3.控制系统:控制系统用于控制阀门的开闭过程。
它通常由气源、气控阀、信号传输装置等组成。
控制系统接收位置反馈装置的信号,并根据设定的控制策略来操作气源和气控阀,从而控制阀门的开闭。
三、阀门气动执行器的工作原理阀门气动执行器的工作原理可以概括为以下几个步骤:1. 开启阀门当需要开启阀门时,控制系统会向气源发送信号,打开气源的输出通道。
气源输出的压缩空气经过管道进入气动执行机构的气缸中,推动活塞向前运动。
活塞的运动会通过连接杆传导给阀门,使阀门打开。
2. 闭合阀门当需要闭合阀门时,控制系统会向气源发送信号,关闭气源的输出通道。
气动执行机构内的气体压力释放,活塞因受到外部压力的作用而向后运动。
活塞的运动会通过连接杆传导给阀门,使阀门关闭。
3. 反馈信号在阀门的开闭过程中,位置反馈装置会不断检测活塞的位置并将信号反馈给控制系统。
控制系统通过比较反馈信号和设定值之间的差异,来判断阀门是否达到预期的开闭状态。
如果差异较大,控制系统会进一步调整气源和气控阀的工作状态,以确保阀门的开闭精度。
四、阀门气动执行器的应用场景阀门气动执行器广泛应用于各种工业领域,特别适用于以下场景:1.管道系统:阀门气动执行器可以用于控制液体或气体的流动,例如在化工厂、电力厂、石油管道等领域中的管道系统中使用。
气动阀门配件种类
气动阀门配件种类气动阀门的工作原理是通过压缩空气驱动活塞来控制阀门开关,而气动阀门的配件则是为了保证气动阀门的正常工作,同时还能够对气动阀门进行更加精细的调整和维护。
在气动阀门的配件中,主要包括以下几类:1. 气动执行器气动执行器是气动阀门的重要部件,其作用是将气源能够转化为机械能,并对阀门执行开关控制。
根据不同的工况和要求,可以选择不同类型的气动执行器,其中比较常见的有:•活塞式气动执行器:这种气动执行器采用活塞结构,通过气源压力使活塞移动,控制阀门的开关。
活塞式气动执行器具有结构简单、可靠性高等优点,广泛应用于各种工业场合中。
•旋转式气动执行器:这种气动执行器采用气动马达或气缸来转动与阀杆相连的旋转执行机构。
与活塞式气动执行器相比,旋转式气动执行器通常具有更为精细的控制性能。
2. 气动阀门位置器气动阀门位置器是一种用于控制气动阀门执行器位置的装置,可通过接收反馈信号并输出相应的调整信号,从而使气动阀门的控制更加恰当和精准。
根据不同的工况和控制要求,气动阀门位置器通常可以分为以下几类:•喂回式位置器:这种位置器的特点是可自动感知气动阀门执行器位置,并根据反馈信号相应调整气动执行器的位置和输出。
与其它类型的气动阀门位置器相比,喂回式位置器通常具有更为准确和可靠的调整性能。
•比例式位置器:这种位置器的特点是在气源压力不变的情况下,通过调整位置器内部的液压比例控制,使气动阀门执行器的位置更加恰当和精准。
3. 气动阀门附件气动阀门附件是气动阀门正常运行所必需的附加设备。
根据不同的阀门类型、材质和工况要求,气动阀门附件包括以下几种:•电动装置:有时需要将气动阀门与环控系统相连,此时需要把气动执行器换成电动执行器,并配合控制面板和驱动程序来完成远程控制和报警功能。
•过滤器:由于压缩空气中有灰尘和杂质,如果不加过滤,就会损坏气动阀门和其它设备。
因此,需要在气源进口处安装过滤器,以过滤掉杂质和灰尘。
•转接头:气动阀门和管道通常采用不同类型的接头,此时需要通过转接头来实现气动阀门与管道之间的连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
气动阀门执行器
由于现在的控制方式和手段越来越多,在实际工业生常和工业控制中,用来控制气动执行机构的方法也很多,常用的有以下几种。
(一)利用PLC来控制的系统
PLC在控制系统中的应用越来越广泛,由于本方案是在OMRON的PLC 上面作的开发,所以以OMRON的PLC来作介绍。
硬件组成:1台计算机,1套PLC(包括CPU,I/O模块,ID212,OC224,AD003模块),2个继电器,2个电磁阀,1个气动阀门执行器。
其组成原理为:由PC机通过RS-232串口通讯连接OMRON的PLC,对PLC进行编程和监控。
PLC的I/O模块分别接入输入、输出信号,其中输入模块连接到阀门上的两个位置传感器,通过PLC的输入模块ID211的指示灯亮的先后顺序来显示阀门的开关状态。
输入模块接收两路阀门检测脉冲输入,即脉冲A与脉冲B。
在运行状态下,脉冲A输入时指示灯A亮,脉冲B输入时指示灯B亮。
输入顺序为AB,表示开阀。
输入顺序为BA表示关阀。
阀门检测脉冲A和B信号必须部分叠加,否则不能正常检测阀门开度。
通过PLC的输出模块OC225控制两个继电器,继电器具有两组常开常闭输出触点,1组为开阀输出触点,1组为关阀输出触点。
开阀时,当阀门开度大于或等于所设阀门限位值时开阀输出触点动作,阀门开度小于所设阀门限位值时开阀输出触点动作,发明开度小于所设阀门限位值时开阀输出触点复位。
关阀时,当阀门关到零位且21s内无脉冲输入时关阀输出触点动作;若21s内有脉冲输入,则延时21s关阀输出触点动作。
通过继电器的吸合来控制两个电磁阀的开关,电磁阀打开后,便可以控制气动阀门执行器使得阀门做相应的开阀或关阀动作。
同时接近传感器把阀门的开关情况再传送到PLC中,并同要求的阀门开度作比较,
直到符合要求为止。
自动归零与自动调满:控制系统具有自动归零与自动调满功能,当阀门开度小于归零范围值或阀门开度距满量程小于满度调节范围值,且时间大于或等于所设值稳定时间值时,PLC自动控制阀门进行归零或自动调满。
在实验中,由阀门上的位置传感器计算阀门的开度。
当阀门先离开A传感器,后离开B传感器时,表示阀门在关阀。
当阀门先离开B传感器,后离开A传感器时,表示阀门在开阀。
传感器接收到的是一个脉冲信号,通过位置传感器的采集信号来记下阀门的开关状态。
利用压缩空气推动执行器内多组组合气动活塞运动,传力给横梁和内曲线轨道的特性,带动空芯主轴作旋转运动,压缩空气气盘输至各缸,改变进出气位置以改变主轴旋转方向,根据负载(阀门)所需旋转扭矩的要求,可调整气缸组合数目,带动负载(阀门)工作。
在上位机中用编程软件CX-programmer编写梯形图,然后把梯形图下载到PLC中运行,在上位机的组态软件中进行控制和监控,阀门开关量的多少可由组态软件界面输入的圈数值确定。
组态界面做好后,开阀、关阀、停止、总开关等控件的控制和动作可以直接在组态界面中很直观形象地进行操作。
气动阀门执行器工作原理
两位五通电磁阀通常与双作用气动执行机构配套使用,两位是两个位置可控:开-关,五通是有五个通道通气,其中1个与气源连接,两个与双作用气缸的外部气室的进出气口连接,两个与内部气室的进出气口接连,具体的工作原理可参照双作用气动执行机构工作原理。
(二)基于单片机开发的智能显示仪控制
智能显示仪是用来监测阀门工作状态,并控制阀门执行期工作的仪
器,它通过两路位置传感器监视阀门的工作状态,判断阀门是处于开阀还是关阀状态,通过编程记录阀门开关的数字,并且有两路与阀门开度对应的4~20mA输出及两足常开常闭输出触点。
通过这些输出信号,控制阀门的开关动作。
根据系统的要求,可将智能阀门显示仪从硬件上分为3部分来设计:模拟部分、数字部分、按键/显示部分。
1、模拟电路部分主要包括电源、模拟量输入电路、模拟量输出电路三部分。
电源部分供给整个电路能量,包括模拟电路、数字电路和显示的能源供应。
为了实现阀门开读的远程控制,需要将阀门的开度信息传送给其他的控制仪表,同时控制仪表能从远方制定阀门为某一开度,系统需要1路4~20mA的模拟量输入信号和1~2路4~20mA的模拟量输出信号。
模拟量输入信号通过A/D转换变成与阀门开度相对应的数字信号后送给数字部分的单片机,在单片机中对它进行滤波处理后就可以输出了。
阀门的开度信息通过D/A转换后变成模拟信号输出,用来接显示仪显示阀门开度或连接其他的控制设备。
在本设计系统中,所有的数字量数据均采用串行的输入输出方式,为了节省芯片资源和空间,输入的4~20mA 的模拟量在转化为数字量时,采用已有的4路DA芯片与单片机的系统资源相结合作8位的AD使用。
2、数字电路部分主要包括:单片机、掉电保护、两路监测脉冲输入信号、两路常开常闭转换触点输出。
在设计方案中选用目前普遍使用的51系列单片机AT89C4051。
AT89C4051是一款低电压、高性能的CMOS8位微控制器,它具有4K字节的可擦除、可重复编程的只读闪存。
通过在单芯片内复合一个多功能的8位CPU闪存,在性能、指令设定和引脚上与80C51和80C52完全兼容。
考虑到在系统掉电或重新启动时,需要保持先前在仪表中设置的一些阀门参数,而单片机中的数据存储器不具备掉电存储功能,所以在片外扩展了一个具有掉电保存功能的芯片X5045。
X5045是一种集看门狗、
电源监控和串行EEPROM3种功能于一身的可编程电路,这种组合设计可以减少电路对电路板空间的需求,X5045中的看门狗为系统提供了保护,当系统发送故障而超过设定时间时,电路中的看门狗将通过RESET信号向CPU作反应。
X5045提供了三个时间值供用户选择使用。
卡珥斯斯文文泵阀它所具有的电压监控功能还可以保护系统免受低电压的影响,当电源电压降到允许范围以下时,系统将复位,直到电源电压返回到稳定值为止。
X5045的存储器与CPU可通过串行通信方式接口。
共4069位,可以按512×8个字节来放置数据。
X5045的管脚排列如图1所示,它共有8个引脚,各个引脚的功能如下:
CS:电路选择端,低电平有效;
SO:串行数据输出端;
SI:串行数据输入端;
SCK:串行时钟输出端;
WP:写保护输入端,低电平有效;
RESET:复位输出端;
Vcc:电源端;
Vss:接地端。
INA为输入信号,是由光电传感器采集到的阀门脉冲信号(<10mA)。
该信号经旁路电容滤波后送入光耦,转换成了输出的OUT电压信号送入单片机。
输出的电压可直接进入单片机的I/O口。
在控制中,要求A、B 两路脉冲都接收到的时候,才认为是由信号输入,AB为正转,BA为反转。
只有一路信号输入时不计数。
两路常开、常闭转换触点输出。
用来连接电磁阀,通过控制电磁阀的吸合来控制气动执行机构作相应的开阀或关阀动作。
3、显示部分主要包括:单片机、4位LED显示、3只状态指示灯(自动、正转、反转)、3只按键(MODE/SET键、上键、下键)。
显示部分采用AT89C4051单片机,用来控制4位LED显示,且同数字部分的单片机进行通讯,还要对控制仪的模式做相应的选择和控制。
显示仪上设计有3只状态指示灯用来显示执行机构的状态:正转、反转、自动;3只按键:MODE/SET键、上键、下键,控制执行机构的工作模式和一些参数的初始化。
这3部分通过接口连接,构成一个完整的控制系统,可以对一些类似气动马达等的执行机构进行控制。
在实际应用中基本实现了预先要求的各种性能指标。