汽车转向梯形机构图解解析
汽车转向系统各部分结构作用图解.doc
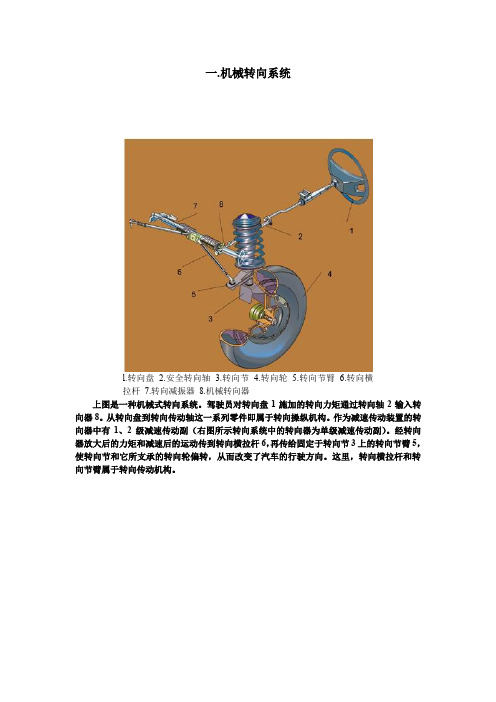
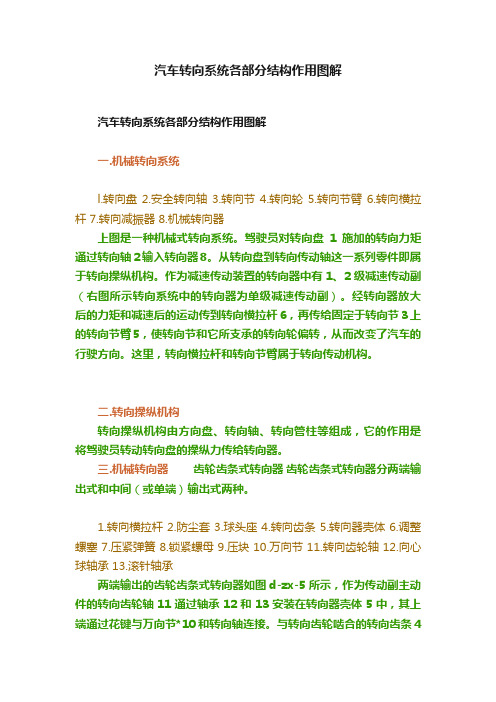
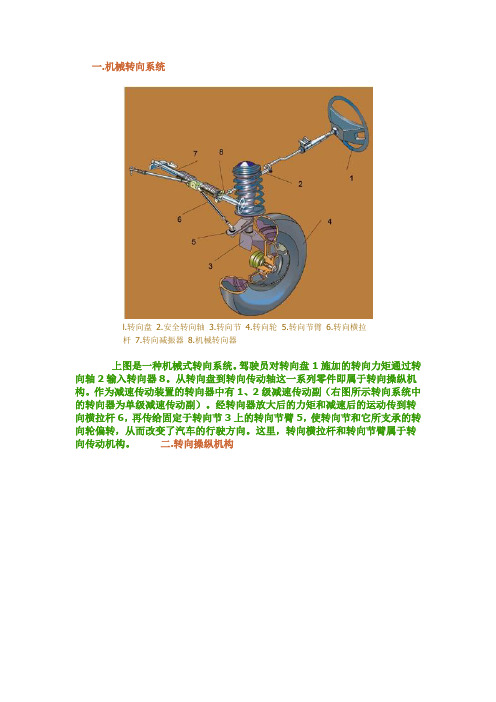
一.机械转向系统l.转向盘 2.安全转向轴 3.转向节 4.转向轮 5.转向节臂 6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节*10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架与转向横拉杆相连。
(d-zx-6)1.万向节*2.转向齿轮轴3.调整螺母4.向心球轴承5.滚针轴承6.固定螺栓7.转向横拉杆8.转向器壳体9.防尘套10.转向齿条11.调整螺塞12.锁紧螺母13.压紧弹簧14.压块循环球式转向器循环球式转向器是目前国内外应用最广泛的结构型式之一,一般有两级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副。
汽车转向系统各部分结构作用图解(二)

欢迎访问e展厅5转向系统/传动系统展厅...汽车转向系统各部分结构作用图解(二)四.转向传动机构汽车转向时,要使各车轮都只滚动不滑动,各车轮必须围绕一个中心点O转动,如图d-zx-07所示。
显然这个中心要落在后轴中心线的延长线上,并且左、右前轮也必须以这个中心点O为圆心而转动。
为了满足上述要求,左、右前轮的偏转角应满足如下关系:与非独立悬架配用的转向传动机构主要包括转向摇臂2、转向直拉杆3转向节臂4和转向梯形。
在前桥仅为转向桥的情况下,由转向横拉杆6和左、右梯形臂5组成的转向梯形一般布置在前桥之后,如图d-zx-08a所示。
当转向轮处于与汽车直线行驶相应的中立位置时,梯形臂5与横拉杆6在与道路平行的平面(水平面)内的交角>90。
在发动机位置较低或转向桥兼充驱动桥的情况下,为避免运动干涉,往往将转向梯形布置在前桥之前,此时上述交角<90,如图d-zx-08b所示。
若转向摇臂不是在汽车纵向平面内前后摆动,而是在与道路平行的平面向左右摇动,则可将转向直拉杆3横置,并借球头销直接带动转向横拉杆6,从而推使两侧梯形臂转动。
1.转向器2.转向摇臂3.转向直拉杆4.转向节臂5.梯形臂6.转向横拉杆当转向轮独立悬挂时,每个转向轮都需要相对于车架作独立运动,因而转向桥必须是断开式的。
与此相应,转向传动机构中的转向梯形也必须是断开式的。
1.转向摇臂2.转向直拉杆3.左转向横拉杆4.右转向横拉杆5.左梯形臂6.右梯形臂7.摇杆8.悬架左摆臂9.悬架右摆臂 10.齿轮齿条式转向器转向直拉杆的作用是将转向摇臂传来的力和运动传给转向梯形臂(或转向节臂)。
它所受的力既有拉力、也有压力,因此直拉杆都是采用优质特种钢材制造的,以保证工作可靠。
直拉杆的典型结构如图十所示。
在转向轮偏转或因悬架弹性变形而相对于车架跳动时,转向直拉杆与转向摇臂及转向节臂的相对运动都是空间运动,为了不发生运动干涉,上述三者间的连接都采用球销。
1.螺母2.球头销3.橡胶防尘垫4.螺塞5.球头座6.压缩弹簧7.弹簧座8.油嘴9.直拉杆体 10.转向摇臂球头销随着车速的提高,现代汽车的转向轮有时会产生摆振(转向轮绕主销轴线往复摆动,甚至引起整车车身的振动),这不仅影响汽车的稳定性,而且还影响汽车的舒适性、加剧前轮轮胎的磨损。
转向机构图解
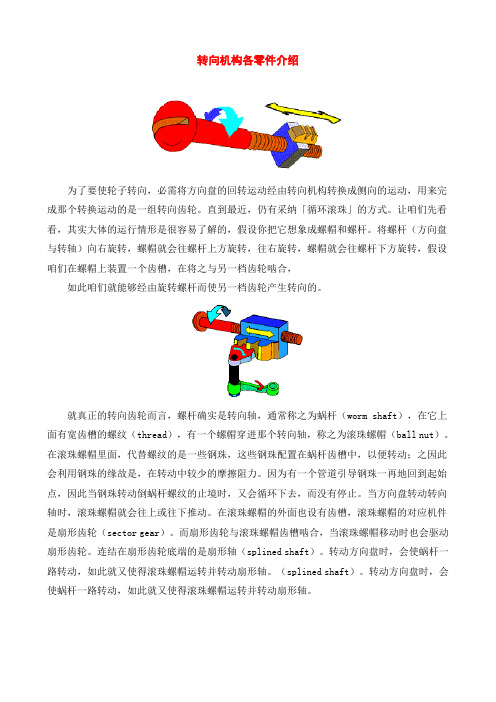
转向机构各零件介绍为了要使轮子转向,必需将方向盘的回转运动经由转向机构转换成侧向的运动,用来完成那个转换运动的是一组转向齿轮。
直到最近,仍有采纳「循环滚珠」的方式。
让咱们先看看,其实大体的运行情形是很容易了解的,假设你把它想象成螺帽和螺杆。
将螺杆(方向盘与转轴)向右旋转,螺帽就会往螺杆上方旋转,往右旋转,螺帽就会往螺杆下方旋转,假设咱们在螺帽上装置一个齿槽,在将之与另一档齿轮啮合,如此咱们就能够经由旋转螺杆而使另一档齿轮产生转向的。
就真正的转向齿轮而言,螺杆确实是转向轴,通常称之为蜗杆(worm shaft),在它上面有宽齿槽的螺纹(thread),有一个螺帽穿进那个转向轴,称之为滚珠螺帽(ball nut)。
在滚珠螺帽里面,代替螺纹的是一些钢珠,这些钢珠配置在蜗杆齿槽中,以便转动;之因此会利用钢珠的缘故是,在转动中较少的摩擦阻力。
因为有一个管道引导钢珠一再地回到起始点,因此当钢珠转动倒蜗杆螺纹的止境时,又会循环下去,而没有停止。
当方向盘转动转向轴时,滚珠螺帽就会往上或往下推动。
在滚珠螺帽的外面也设有齿槽,滚珠螺帽的对应机件是扇形齿轮(sector gear)。
而扇形齿轮与滚珠螺帽齿槽啮合,当滚珠螺帽移动时也会驱动扇形齿轮。
连结在扇形齿轮底端的是扇形轴(splined shaft)。
转动方向盘时,会使蜗杆一路转动,如此就又使得滚珠螺帽运转并转动扇形轴。
(splined shaft)。
转动方向盘时,会使蜗杆一路转动,如此就又使得滚珠螺帽运转并转动扇形轴。
假使车子有动力转向配备,那蜗杆就会连结到卷轴阀(spool valve)上,卷轴阀其实确实是一个操纵闸,它将引导动力到滚珠螺帽(动力活塞),这使得动力能集中在一个方向。
转向连杆毕特门臂:毕特门臂是转向机构中第一个能够转动的零件,在转向系统中,毕特门臂螺栓是经受最大压力的接头,因为它必需移动其它所有的转向连杆(steering linkage)。
检查毕特门臂的方式很容易,只要将车子的轮子置于跑台上(在利历时要将转盘固定好),然后将方向盘前后摇动,毕特门臂螺栓、毕特门臂与中央连结应该全都一路移动,就像是同一个装置;假使你发觉毕特门臂在移动,而螺栓没有随着移动(同时且一样运动速度),就要改换毕特门臂,可是要靠近观看螺栓,看看螺栓是不是真的是毕特门臂的一部份?很多零件目录会对毕特门臂标示「无法供给」,这表示只有消耗零件(螺栓)是在中央连杆上而不是在毕特门臂上。
汽车转向系统各部分结构作用图解

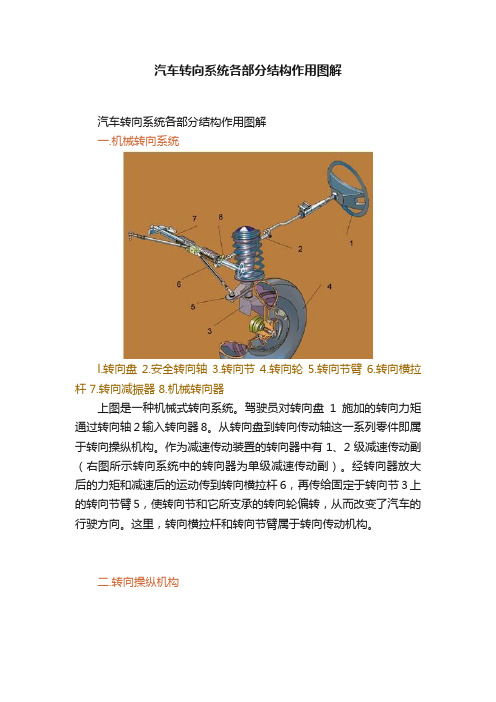
汽车转向系统各部分结构作用图解l.转向盘2.安全转向轴3.转向节4.转向轮5.转向节臂6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副〔右图所示转向系统中的转向器为单级减速传动副〕。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
那个地点,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间〔或单端〕输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节*10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器差不多相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架与转向横拉杆相连。
〔d-zx-6〕1.万向节*2.转向齿轮轴3.调整螺母4.向心球轴承5.滚针轴承6.固定螺栓7.转向横拉杆8.转向器壳体9.防尘套10.转向齿条11.调整螺塞12.锁紧螺母13.压紧弹簧14.压块循环球式转向器循环球式转向器是目前国内外应用最广泛的结构型式之一,一样有两级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副。
汽车转向系统各部分结构作用图解
汽车转向系统各部分结构作用图解汽车转向系统各部分结构作用图解一.机械转向系统l.转向盘 2.安全转向轴 3.转向节 4.转向轮 5.转向节臂 6.转向横拉杆 7.转向减振器 8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块 10.万向节 11.转向齿轮轴 12.向心球轴承 13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节*10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架与转向横拉杆相连。
转向梯形分析
第六节转向梯形转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
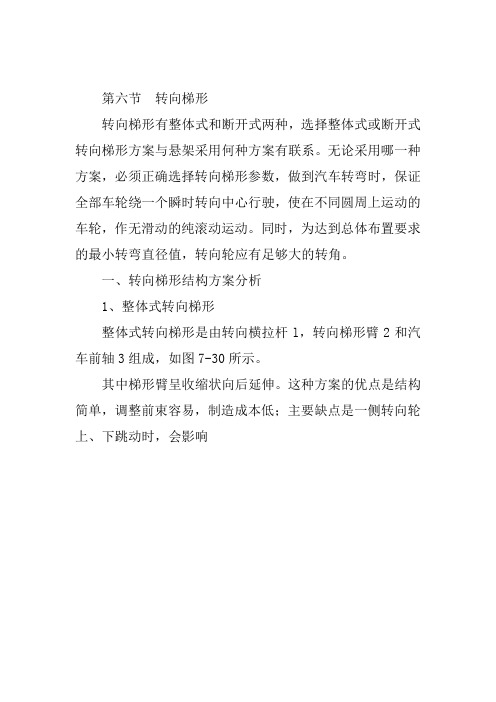
一、转向梯形结构方案分析1、整体式转向梯形整体式转向梯形是由转向横拉杆l,转向梯形臂2和汽车前轴3组成,如图7-30所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响图7—30 整体式转向梯形1—转向横拉杆 2—转向梯形臂 3—前轴另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
2、断开式转向梯形转向梯形的横拉杆做成断开的,称之为断开式转向梯形。
断开式转向梯形方案之一如图7-31所示。
断开式转向梯形的主要优点是它与前轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时,不会影响另一侧车轮;与整体式转向梯形比较,由于杆系、球头增多,所以结构复杂,制造成本高,并且调整前束比较困难。
图7—31 断开式转向梯形横拉杆上断开点的位置与独立悬架形式有关。
采用双横臂独立悬架,常用图解法(基于三心定理)确定断开点的位置。
其求法如下(图7-32b):1)延长B K B 与A K A ,交于立柱AB 的瞬心P 点,由P 点作直线PS 。
S 点为转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。
当悬架摇臂的轴线斜置时,应以垂直于摇臂轴的平面作为当量平面进行投影和运动分析。
汽车转向梯形优化设计
转向梯形机构优化设计课程设计题目:汽车转向梯形臂优化设计指导老师:郭朋彦华北水利水电大学转向梯形的优化设计.1. 向梯形机构概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32.整体式向梯形构方案分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3整体式向梯形机构化分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯4整体式向梯形程序写⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯7转动传动机构强度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯12转向梯形的优化结果⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13转向梯形结构设计图形⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯13结论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯15;.转向梯形机构优化设计方案一、转向梯形机构概述转向梯形机构用来保证汽车转弯行驶时所有车轮能绕一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动。
设计转向梯形的主要任务之一是确定转向梯型的最正确参数和进行强度计算。
一般转向梯形机构布置在前轴之后,但当发动机位置很低或前轴驱动时,也有位于前轴之前的。
转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为到达总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
二、整体式转向梯形结构方案分析图整体式转向梯形;.1—转向横拉杆2—转向梯形臂3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造本钱低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干预,所以在布置上有困难。
整体式转向梯形机构优化设计-2014

整体式转向梯形机构优化设计SGA3550型自卸式非公路用汽车采用整体式转向梯形机构(如图1所示) ,由转向横拉杆、转向梯形臂和汽车前轴组成。
图中,为K主销中心距,L为轴距,为转向梯形底角, W为转向臂长,为内侧车轮转角,为外侧车轮转角(以下符号意义相同) 。
这种方案的优点是结构简单,调整容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
车辆转向时,内侧车轮被迫沿着比外侧车轮小的弧线行进,因此,转向梯形应使汽车在转向时两前轮产生不同的转向角,并沿着各自的弧线滚动,同时前后四个车轮又绕着同一圆心滚动 ,从而消除轮胎的滑动。
若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:cot-cot=K/L (1)若自变角为,则因变角的期望值为=arccot(cot-K/L) (2)现有转向梯形机构仅能近似满足上式关系。
利用余弦定理可推得转向梯形的实际因变角如下:图2(3)(4)(5)(6)由(4)(5)(6)式得出(7)(8)由(3)(7)(8)式得出:实际因变角要求:(1) 列出转向机构的优化数学模型(2) 已知轮距2900mm;轴距L= 3800 mm;主销中心距K= 2100 mm;用Matlab中lsqcurvefit(……)函数或lsqnonlin(……)函数进行优化,求取设计变量梯形底角的值(要求底角范围在60-90度之间),转向梯形臂长度的值(要求在250-450mm之间)以满足设计需求。
该优化问题可以看作是将理想的内外转向轮曲线同待优化的内外转向轮角度关系进行拟合,MATLAB优化工具箱中提供了几种可供选择的优化函数:(1) [x,resnorm]=lsqcurvefit(fun,x0,xdata,ydata,lb,ub),该函数是进行非线性曲线的二次拟合。
其中F(x)为待优化的函数,数学模型为:(2) [x,resnorm]=lsqnonlin(……),该函数求解非线性最小二乘问题,包括非线性数据拟合问题。
汽车转向梯形机构设计

汽车转向梯形机构设计及matlab/simMechanics 仿真汽车转向梯形机构设计及matlab/simMechanics 仿真Trapezoidal steering mechanism design matlab simMechanics Simulation 一、汽车转向梯形机构设计1.设计模型与要求:已知汽车梯形转向机构如下图所示。
该车车型为沃尔沃,转向节跨距M 为1305mm ,前轮距D 为1535mm ,轴距L 为2640mm 。
该车最小的转弯半径R 为5300mm ,并且具有良好的传力性能。
2.结构概述与条件分析根据题目条件,转向节跨距M ,前轮距D ,轴距L 均已知,则设计梯形转向机构只需要确定连架杆a ,连杆b 和轮与连架杆之间的夹角0α即可。
由于aM b 2cos 0-=α 根据最小转弯半径R=11000,以及公式:)(21sin max M D R L--=α求出m ax α=30.61313.两侧转向轮偏转角之间的理想关系式为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎过快磨损,要求车轮作纯滚动。
显然只有在车轮轴线交于O 点才能实现。
此时的α和β满足以下关系式:LM +=βαcot cot 为此要精心地确定转向梯形机构的参数。
实际设计中,所有汽车的转向梯形都只能设计得再一定的车轮偏转角范围内,使两侧车轮偏转角的关系大体上接近于理想关系。
4.转向传动机构的优化设计4.1 传动机构连架杆与车轮轴线夹角0α的确定根据经验公式:︒±=5)34arctan(0ML α 带入数据得 0α=67.4161︒~77.4161︒,初步设计取的是72︒。
4.2 理论曲线与实际曲线焦点位置的确定以及连架杆a 的确定根据经验得交点一般发生在0.8m ax α~0.95m ax α=24.49°~29.0824°之间,实验中取α=26︒。
此时实际理论ββ==)tan tan arctan(ααM L L -=32.728°,带入实际公式,则可以确定连架杆a 值。
汽车转向梯形机构图解解析

汽车转向梯形机构图解解析————————————————————————————————作者:————————————————————————————————日期:轮式车辆转向梯形结构的图解解析常州工业技术学院钨华芝常州市政工程管理处魏晓静摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解1 引言轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
2 转向理论特性机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:ctgß-ctga=M/L (1)式中ß-外轮转角 a-内轮转角 M-转向轴两主销中心距 L-车辆前后轴轴距为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
转向梯形分析
第六节转向梯形转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
一、转向梯形结构方案分析1、整体式转向梯形整体式转向梯形是由转向横拉杆l,转向梯形臂2和汽车前轴3组成,如图7-30所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响图7—30 整体式转向梯形1—转向横拉杆 2—转向梯形臂 3—前轴另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
2、断开式转向梯形转向梯形的横拉杆做成断开的,称之为断开式转向梯形。
断开式转向梯形方案之一如图7-31所示。
断开式转向梯形的主要优点是它与前轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时,不会影响另一侧车轮;与整体式转向梯形比较,由于杆系、球头增多,所以结构复杂,制造成本高,并且调整前束比较困难。
图7—31 断开式转向梯形横拉杆上断开点的位置与独立悬架形式有关。
采用双横臂独立悬架,常用图解法(基于三心定理)确定断开点的位置。
其求法如下(图7-32b):1)延长B K B 与A K A ,交于立柱AB 的瞬心P 点,由P 点作直线PS 。
S 点为转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。
当悬架摇臂的轴线斜置时,应以垂直于摇臂轴的平面作为当量平面进行投影和运动分析。
汽车转向梯形机构图解解析
汽车转向梯形机构图解解析(总6页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除轮式车辆转向梯形结构的图解解析常州工业技术学院钨华芝常州市政工程管理处魏晓静摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解1 引言轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
2 转向理论特性机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:ctg-ctga=M/L (1)式中 -外轮转角 a-内轮转角 M-转向轴两主销中心距 L-车辆前后轴轴距为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
汽车转向系统各部分结构作用图解
汽车转向系统各部分结构作用图解汽车转向系统各部分结构作用图解一.机械转向系统l.转向盘 2.安全转向轴 3.转向节 4.转向轮 5.转向节臂 6.转向横拉杆 7.转向减振器 8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块 10.万向节 11.转向齿轮轴 12.向心球轴承 13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键与万向节*10和转向轴连接。
与转向齿轮啮合的转向齿条4水平布置,两端通过球头座3与转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使与之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理与两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6与左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架与转向横拉杆相连。
汽车转向系统各部分结构作用图解73447
一.机械转向系统l.转向盘2.安全转向轴3.转向节4.转向轮5.转向节臂6.转向横拉杆7.转向减振器8.机械转向器上图是一种机械式转向系统。
驾驶员对转向盘1施加的转向力矩通过转向轴2输入转向器8。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有1、2级减速传动副(右图所示转向系统中的转向器为单级减速传动副)。
经转向器放大后的力矩和减速后的运动传到转向横拉杆6,再传给固定于转向节3上的转向节臂5,使转向节和它所支承的转向轮偏转,从而改变了汽车的行驶方向。
这里,转向横拉杆和转向节臂属于转向传动机构。
二.转向操纵机构转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将驾驶员转动转向盘的操纵力传给转向器。
三.机械转向器齿轮齿条式转向器齿轮齿条式转向器分两端输出式和中间(或单端)输出式两种。
1.转向横拉杆2.防尘套3.球头座4.转向齿条5.转向器壳体6.调整螺塞7.压紧弹簧8.锁紧螺母9.压块10.万向节11.转向齿轮轴12.向心球轴承13.滚针轴承两端输出的齿轮齿条式转向器如图d-zx-5所示,作为传动副主动件的转向齿轮轴11通过轴承12和13安装在转向器壳体5中,其上端通过花键和万向节*10和转向轴连接。
和转向齿轮啮合的转向齿条4水平布置,两端通过球头座3和转向横拉杆1相连。
弹簧7通过压块9将齿条压*在齿轮上,保证无间隙啮合。
弹簧的预紧力可用调整螺塞6调整。
当转动转向盘时,转向器齿轮11转动,使和之啮合的齿条4沿轴向移动,从而使左右横拉杆带动转向节左右转动,使转向车轮偏转,从而实现汽车转向。
中间输出的齿轮齿条式转向器如图d-zx-6所示,其结构及工作原理和两端输出的齿轮齿条式转向器基本相同,不同之处在于它在转向齿条的中部用螺栓6和左右转向横拉杆7相连。
在单端输出的齿轮齿条式转向器上,齿条的一端通过内外托架和转向横拉杆相连。
(d-zx-6)1.万向节*2.转向齿轮轴3.调整螺母4.向心球轴承5.滚针轴承6.固定螺栓7.转向横拉杆8.转向器壳体9.防尘套10.转向齿条11.调整螺塞12.锁紧螺母13.压紧弹簧14.压块循环球式转向器循环球式转向器是目前国内外使用最广泛的结构型式之一,一般有两级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副。
载货汽车转向梯形的组成
载货汽车转向梯形的组成
载货汽车的转向系统是负责控制汽车转向方向和角度的关键部件,梯形是转向系统的重要组成部分,它能够将驾驶员的方向盘旋转的力量传递到车轮上,以实现汽车的转向操作。
梯形转向是一种直接转向机构,主要由转向杆、U型跨杆、普通跨杆、调节杆和连接杆等几个零部件组成。
它的结构简单,维护方便,所以被广泛应用于中小型载货汽车上。
梯形转向的基本原理是:当驾驶员旋转方向盘时,转向杆就会随着方向盘旋转,从而真实反应出驾驶员的操作意图。
同时,转向杆带动U型跨杆和普通跨杆相互配合工作,将方向盘旋转的力量通过转向节传递到前桥的路轮上,实现汽车的实际转向。
调节杆和连接杆的作用是稳定梯形结构,防止震动和不规则转向。
U型跨杆是梯形的核心零部件之一,它是一个基于三角架结构的强度较高、承载能力较强的杆件。
U型跨杆的两个侧面分别与转向杆和普通跨杆相连,其中一个端点通过转向节与车轮相连。
所以,当转向杆旋转时,通过U型跨杆将转向力量传递到普通跨杆中,从而实现前轮的转动。
普通跨杆则是连通两个U型跨杆的杆件,与U型跨杆相连的两个端点都可以旋转,从而实现汽车的可以左右转向。
调节杆和连接杆都是连接各个零部件的固定器材,在梯形转向系统中发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮式车辆转向梯形结构的图解解析
常州工业技术学院钨华芝常州市政工程管理处魏晓静
摘要介绍几种简单实用的车辆转向梯形结构的图解解析设计法。
通过事先设定内、外转向轮实际特性曲线与理论特性的交点位置来控制转角偏差的方法,选择转向梯形机构参数,可以大大减少图次数,提高工作效率,减小转角误差。
关键词:转向梯形机构解析图解
1 引言
轮式车辆一般都是依靠转向车轮偏转一个角度来实现转弯或曲线行驶。
转向是的基本要求是保证所有车轮滚动而不发生滑动,这一要求通常由平面四杆机构来达到。
传统的设计都采用图解转向梯形的方法。
这种方法需要按经验数据选择机构的几何参数,然后作图校核该梯形机构在运动过程中转向轮的转角偏差是否大于允许偏差,若大于允许偏差,则重新选择或调整几何参数,再校核图,直至转角偏转小于允许偏差为止。
这实际上是一种试凑的方法,带有较大的盲目性,工作量大。
随着计算机的发展,解析法得到了较好的应用,但是传统的图解法仍有它直观、方便的优点,因此仍然被工程设计人员广泛采用。
本文介绍一种简单高效且实用的图解解析设计法,可以大大减少作图校核的次数,提高工作效率。
2 转向理论特性
机动车辆或装卸搬运车辆的转向大多采用双轴线式转向方式,见图1。
为了满足纯滚动条件,转向时所有车轮必须以不同的半径围绕同一转向中心滚动,各个车轮的轴线交于瞬时转向中心O点。
虽然两个转向轮偏转的角度不同,但是两个转角之间应满足下列几何关系:
ctgß-ctga=M/L (1)式中ß-外轮转角a-内轮转角M-转向轴两主销中心距L-车辆前后轴轴距
为了满足运动学上的这一几何关系,一般都是通过设计转向梯形机构来实现的。
式(1)称为转向理论特性。
3 转向梯形的图解设计及其转角误差
转向梯形四杆机构中,固定件长度(两主销中心距)M是由车辆总体设计给出的,两梯形臂长相等。
因此只有两个独立变量有待确定,一个是连杆(横拉杆)长度,另一个是两摇杆(梯形臂)长度,这两个参数还可以转化为梯形底角O及梯形臂长m,见图1。
通常设计时,根据o和m值,用作图法作出所选机构在转向轮转角范围内(a<a max),内、外转角a和ß的一组实际对应值,并将这组对应的转角(a I,ßI)按图2所示作出实际特性曲线GE,与理论特性GF比较,得到转角的偏差值ß。
如两条特性接近,则*小于允许偏差,说明转向梯形几何参数合理;如果ß大于允许偏差,则须重新选择梯形参数,重复作图。
对于工程机械,a max=450,ß不大于10~30。
4 实际特性曲线分析
采用转向梯形图解法时,为了满足转角误差的要求,常常需要多次重复作图,初选梯形参数之前,如果能分析初底角o和梯形臂长m两个参数与转角误差之间的关系,使初选梯形机构的实际特性曲线与理论特性曲线逼近,则通过一两次作图就能达到设计要求,大大提高工作效率。
转向梯形的设计是给出两连架杆对应转角函数关系*=f(*)的四连杆机构的设计问题,有无穷多的近似解,每一种解的误差不尽相同,其结果分三种情况(见图3):第一种情况,在最大转角a max范围内,实际特性曲线与理论特性只有a=0一个交点,两曲线相距较大;第二情况两特性曲线在a1=0、a2=a max两处有交点,误差比第一种情况小;第三种情况,两特性曲线在a1=0、a2<a max两处有交点,显然,交点K取得合适,则转角误差比前两种情况均小。
例如,转向梯形参数M/L=,a max=450,如果初选参数*=780,m/M=,则实际特性曲线与理论特性将在a2=590有交点,a2>a max,最大转角误差ß=,属于第一种情况;如果初选参数
*=720,m/M=,则交点a2=400,a2=,厚大转角误差ß=,属第三种情况。
通过分析可见,第三种情况,实际特性曲线与理论特性比较接近,所设计的转向梯形结构一般均能满足转角误差要求。
5 转向梯形参数的确定
引入平面四杆机构的图解设计法,见图4。
设各杆长度:固定构件AD=M,是已确定的转向轴主销距;连架杆AB=CD=m为特定的转向臂长;连杆BC=n特定。
建立图示坐标系,并设AB转向臂与X轴的夹角为*,转向梯形底角为*,转向时内轮转角为a,外轮转角为ß,则有:
通过解析几何的方法可以得到转向梯形角位移方程式:
方程式(7)只有两个未知数K1和K2。
为了得到精确解,给出两连架对应的两对角位移(*,*)和(*,*),由选取转向轮满足转向理论特性ctg*-ctg=M/L关系式的两组内、外轮转角(*,*)和(*,*)分别带入式(2)计算*和*,然后带入式(6),计算出对应的a1,ß1和a2ß2,建立方程组
a1K1+K2=ß1
a2K1+K2=ß2
解得
由式(4)得到连杆(转向臂)及连杆(横拉杆)长
若所取a2<a max,那么,按上述方法所设计的转向梯形实际特性曲线,在0~a max范围内必定与理论特性有两个交点,即满足转角关系的精确点。
为确保车辆直线行驶,在a1=0,ß1=0设置一个精确点(a1,ß1)就是另一个精确点。
A2点的选取要适当,取得过小,在a1接近a max时,实际特性曲线将在反方向中偏离理论特性较大,使转角误差增大,取a2=~a max较合适。
底角O初选。
当车身较长,M/L较小时,O应偏大,例如M/L=,取O=较理想;而当车身短,M/L较大时,O应偏小,例如M/L=,取O=720能满足设计要求。
底角初选还可以用公式*来确定,S是与d2点及转角误差有关的系数,运用本文介绍的设计方法时,S取。
当用初选的底角O及选定的精确点d2代入公式设计出的m/M不能满足工程设计要求时,即>m/M>时,可以在第一次初选的O角附近改变其值,再作计算(见设计方法举例)其规律是:m/M值偏大,则O减小;反之m/M值偏小或出现负值,则O增加。
6 设计方法举例
以装卸搬运车辆转向轴主销中心距M与轴距L之比M/L=,内轮最大转角a max<450,要求转角误差*<20
为便,转向梯形机构设计方法如下。
为了控制所设计转向梯形机构转角误差,在a2=400()设计一个精确点,对应的*=,显然a1=0,*=0也是一个精确点。
初选底角,取*=760,然后有公式(2)、(6)、(9)和(10)计算*、*、a、ß、K1、K2、m/M、n/M(计算数据见附表)。
因为m/M偏大,故减小底角*,取*=750,再作计算,结果m/M=,通过作图校核最大转角误差*=,满足要求。