KB400伺服电机行星减速机配15KW11KW7.5KW松下台达安川伺服电机
台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..

台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
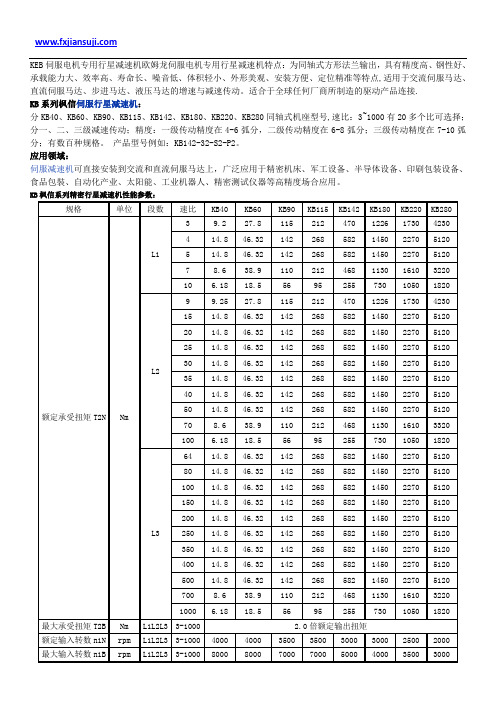
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
60系列行星减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
松下伺服,台达,西门子变频器参数(应用版)

1.0横移伺服驱动器的设定A4注:其它参数都是缺省值。
1.1上下伺服驱动器的设定A4注:其它参数都是缺省值。
、松下A5(MCDHT3520E)伺服器相关参数设置(用PANATERM VER5.0软件调试)(配USB mini-B通讯线连接到驱动器X1)1,Pr-002:4 (PANATERM软件运行调试机械磨合好刚性,增益之后,设为0).4变为02,Pr-003:4-13 (根据机械手运行后的平稳情况而定,近几台机器都是横移为13、升降为11----4)3,Pr-004:(软件自动调,一般为100-600)4,Pr-007:35,Pr-008: 横移为2020、升降为2000(PLC程序中相对A4的距离和速度都*10),Pr-010则无效6,Pr-100, Pr-101, Pr-102等跟增益有关的参数都是在Pr-002不为0的情况下,运行之后会自动变化的7,伺服-ON即激磁,在PLC程序里,必须设计为只要无报警,则长通;刹车也是。
8,参考英利湿化学J588右进(11#)(S-10-200)或J588左进(12#)(S-10-199)松下伺服电机A5软件下载/描述:由于软件过大,摧荐上松下网站下载,复制以下网址就加入到讯雷等下载软件下载即可/setupsoft/setup.exe运行PANATERM ver 5.0 软件1.2 1、3、4、6、7槽/配碱搅拌泵变频器的设定(台达VFD-M与触摸屏MT4500T通信)EviewMT4500T屏(20画面)的1-6槽循环泵数值输入元件的输入地址中的:HMI都是0,PLC是5/6/7/8/9,地址类型都是4X,地址都是8194,8194=2001H+1,2001H是VFD变频器参数中P92中取03时,MODBUS RTU模式,资料格式8N2中对变频器的命令2001H频率命令,2001H十六进制换为十进制=8193,因触摸屏地址是从0开始的所以需加1。
VFD变频器的输出COM与M0由Y232-Y237直接控制输出。
行星减速机_日本安川伺服电机阿尔法行星减速机sgd7w-1r

特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
AB115-L1-S2-P2行星斜齿减速机伺服,松下电机减速机
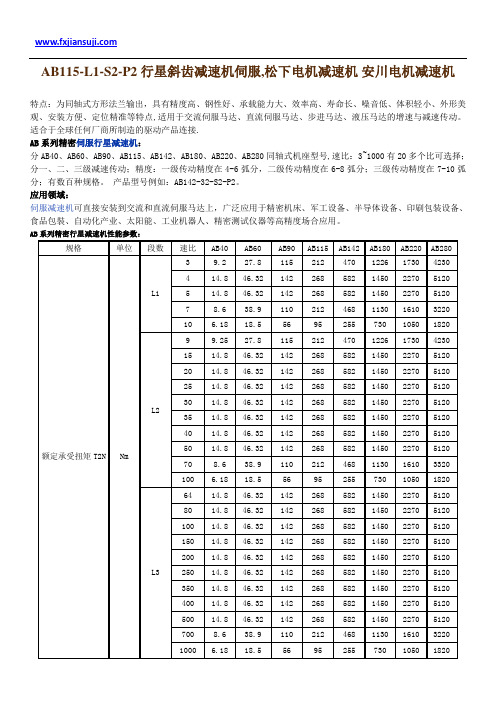
特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.AB系列精密伺服行星减速机:分AB40、AB60、AB90、AB115、AB142、AB180、AB220、AB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:AB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
AB系列精密行星减速机性能参数:AB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机用蜗轮蜗杆减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
减速器 AB060-S2-P2 配装400W伺服电机减速器 减速比1:5

特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
NMRV050-30-370w松下伺服电机蜗轮减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
三菱伺服电机专用行星减速机、
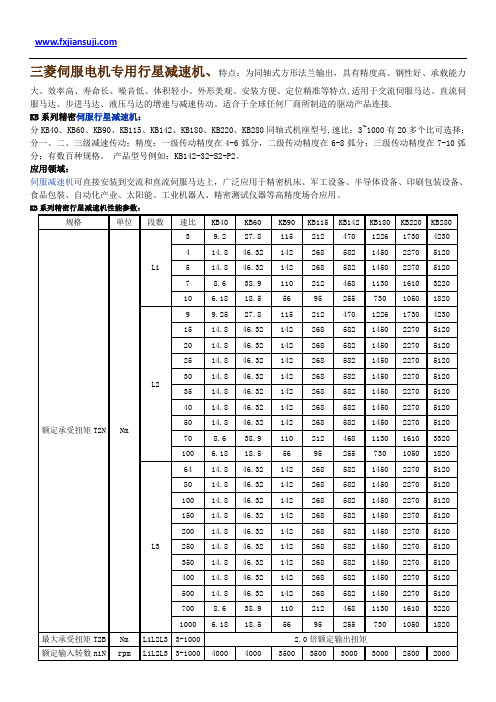
三菱伺服电机专用行星减速机、特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机减速机选型
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
伺服电机用行星减速机
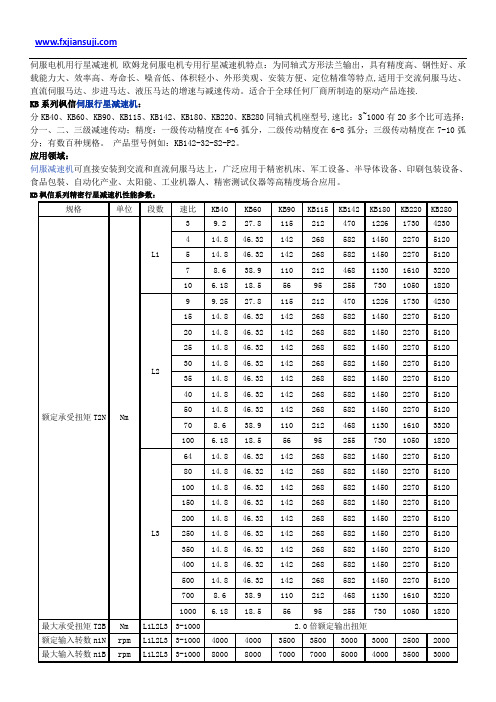
伺服电机用行星减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:精密背隙P1arcmin L1 3-10. ≤4≤4≤4≤4≤4≤4≤4≤4 L2 9-100 ≤6≤6≤6≤6≤6≤6≤6≤6 L3 64-1000 ≤7≤7≤7≤7≤7≤7≤7≤7标准背隙P2 L1 3-10. ≤6≤6≤6≤6≤6≤6≤6≤6 L2 9-100 ≤8≤8≤8≤8≤8≤8≤8≤8 L3 64-1000 ≤10≤10≤10≤10≤10≤10≤10≤10容许径向力F1 N L1L2L3 3-1000 780 850 2250 4700 6400 8500 40000 60000 容许轴向力F2 N L1L2L3 3-1000 390 450 1100 2350 3700 4250 20000 30000 使用寿命h L1L2L3 3-1000 20000效率η%L1 3-10. 97% 97% 97% 97% 97% 97% 97% 97% L2 9-100 94% 94% 94% 94% 94% 94% 94% 94% L3 64-1000 91% 91% 91% 91% 91% 91% 91% 91%重量kg L1 3-10. 0.5 1.4 4.2 9.2 20 34 48 90 L2 9-100 0.8 1.9 5.2 11.3 24.5 42 60 115 L3 64-1000 1.1 2.4 6.2 13.2 28 50 72 140噪音dB L1L2L3 3-1000 ≤58≤58≤65≤65≤70≤70≤75≤75使用温度℃L1L2L3 3-1000KB系列精密行星减速机转动惯量:规格单位段数速比KB40 KB60 KB90 KB115 KB142 KB180 KB220 KB280转动惯量kg.cm²L13/4/5. 0.03 0.18 0.75 2.85 12.4 15.3 34.8 44.9 7-10. 0.018 0.12 0.45 1.95 8.1 14.8 28.6 39.2 L29-50 0.023 0.15 0.52 2.15 7.6 15.2 32.2 41.8 70-100 0.018 0.072 0.38 1.85 6.9 14.6 26.7 32.6 L364-350 0.016 0.07 0.36 2.05 6.3 14.2 18.3 28.1 400-1000 0.016 0.065 0.29 1.65 4.3 12.6 13.7 22.5配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 126 145 164400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211 750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1000W 115 4-M8 19F7 55 95(H7) 5 130 185 208 231配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 203 235 259 1500W 145/130 4-M8 22/24F7 65 110(H7) 10 130 213 245 269 2000W 165 4-M10 32F7 65 130(H7) 10 150 233 265 389配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机台达伞齿轮减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
行星减速机生产厂家
行星减速机生产厂家枫信伺服行星减速机可与全球任何厂家所生产的驱动产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。
减速机的优点:1、独特多段减速比,高效率输出扭力之行星齿轮式减速装置是伺服马达、步进马达等精密传动机构的最佳组合。
2、专利内齿环设计,确保而用与低噪音。
3、密闭式全油封设计确保润滑油脂不泄漏。
4、低耗损精密齿轮设计传动效率高速95%。
5、适合NEMA马达按装标准规范,按装容易。
6、同级产品中体积最小,最适合有限之设备空间。
7、高精度低背隙10弧分,精准型5弧分皆可供应。
8、内部组件采用经热处理之高强度合金钢材,足堪应付严峻的恶劣工作环境。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸:40mm---215mm减速比:3---512传递力矩:3Nm---1800Nm精密侧隙:≤5arcmin安装方式:任意激光剥线机专用行星减速机KB115-50 行星减速机技术参数广泛应用于:钢丝绳传动寿命试验机、绕线机、火焰切割、数控机床、激光切割、玻璃设备、精密仪器、数控机床、工具机械、自动化产业、工业机器人测量设备、食品包装、焊接设备、印刷机械、纺织印染、制药制革、环保设备、水泥设备、煤炭设备、啤酒饮料、矿山机械、橡胶塑料、石油化工、起重运输、制药制革、环保设备等轻、重工业的机械传动和精密控制领域。
PF系列速比:一级速比(3 4 5 8 10)二级速比(9 12 15 16 20 25 32 40 64)三级速比(60 80 100 120 160 200 256 320 512)常用速比:5 10 20 32 40PF系列型号:PF40 PF60 PF80 PF115 PF130 PF142 PF215PLS系列型号:PLS40、PLS60、PLS80、PLS120、PLS140、PLS160 新系列型号:(PLS50、PLS70、PLS90、)减速比范围:一级速比(3 4 5 8 10)二级速比(9 12 15 16 20 25 32 40 64)三级速比(60 80 100 120 160 200 256 320 512)AF常用型号:AF60、AF90、AF115、AF120、AF常用速比:(5 8 10 16 20 28 32 40 64 80 )直角行星减速机同系列分:ABR60、ABR90、ABR115、ABR142、ABR180、AB220、AB280、AB330、AB400 直角行星减速机常用机座型号ABR常用型号:ABR60、ABR90、ABR115、ABR142ABR常用速比:(5 10 16 20 28 32 40 50 64 80 )AB系列型号及速比:AB60、AB90 、AB115 、AB142、AB180、AB220 、AB280 、AB330、AB400 AB常用速比:AB60、AB90、AB115、AB142AB常用速比:(5 10 16 20 28 32 40 64 80 )AE本系列型号分: AE40、AE60、AE80、AE90、AE120、AE140、AE160、AE200 AE常用速比:(5 8 10 16 20 28 32 40 64 80 )AER常用速比:AER60 AER90 AER120 AER140AER常用速比:(5 10 16 20 28 32 40 64 80 )AD型号分:AD60、AD90、AD120、AD160、AD200、AD250、AD300机座型号常用速比:(5 7 10 16 20 35 40 64 80 100 125 245 280 )型号:PLE40 PLE60 PLE80 PLE120 PLE160一级速比(3 4 5 8 10)二级速比(9 12 15 16 20 25 32 40 64)三级速比(60 80 100 120 160 200 256 320 512)PLF减速机型号:PLF40 PLF60 PLF80 PLF115 PLF120 PLF160常用速比:5 10 20 32 40WPLE常用型号:WPLE80、WPLE120、WPLE140常用速比:(5 8 10 16 20 32 40 64)PX常用型号:(PX60、PX85、PX115、PX142 )常用速比:(5 8 10 16 20 32 40 )WPLF常用型号:WPLF80、WPLF120、WPLF140常用速比:(5 8 10 16 20 32 40 64)PL系列型号:PL40、PL60、PL80、PL120、PL140、PL160 新系列型号:(PL50、PL70、PL90、)减速比范围一级速比(3 4 5 8 10)二级速比(9 12 15 16 20 25 32 40 64)三级速比(60 80 100 120 160 200 256 320 512)枫信精密行星减速机在主要行业应用1、在数控卧式车床上的应用2、在数控立式车床上的应用3、在数控磨床上的应用4、在机床回转刀塔上的应用5、在数控回转刀架上的应用6、在数控齿轮倒棱机上应用7、在数控滚齿机上的应用8、在数控插齿机上应用9、在数控磨齿机床上应用10、在加工中心设备上应用11、在数控绗磨机上应用12、在数控插床上应用13、在数控电动缸设备上应用14、在汽车检测设备上应用15、在数控印刷机上应用16、在陶瓷印刷设备上应用17、在瓦楞纸箱设备上应用18、在数控喷绘设备上应用19、在数控印染印花设备上应用20、在数控激光雕刻机上应用21、在数控等离子或火焰切割机加工设备上应用22、在数控等离子或火焰切割机上应用23、在木工雕刻设备上应用24、在数控弯管机上应用25、在数控手术设备上应用26、在地面或舰船雷达上应用27、在车载雷达上应用28、在数控橡胶设备上应用29、在数控鞋楦机上应用30、在数控轴承加工设备上应用31、在数控压力设备上应用32、在数控绣花设备上应用33、在数控食品机械(香肠包装机)上应用34、在数控螺丝拧紧机上应用35、在关节机械人上应用36、在数控直行机械手上应用37、在数控声像设备上应用38、在数控弹簧设备上应用39、在数控单晶或多晶炉设备上应用40、在晶体切割设备上应用41、在数控锂电池涂布设备上应用42、在数控纸巾设备上应用43、在数控包装设备上应用44、在数控软包装设备上应用45、在数控灌装设备上应用46、在数控PCB加工设备上应用47、在纺织印染设备上应用48、在数控柔版印刷设备上应用49、在高速绣花机上应用50、在传动机械(如浮法玻璃生产线)上应用51、在注塑机上的应用52、在数控水射流设备上的应用53、在数控植毛机上应用54、在数控生物反应器上应用55、在数控纸巾包装设备上应用56、在数控弯刀机上应用57、在激光焊缝检验设备上应用58、在数控LED分检设备上的应用59、在数控门窗加工设备上应用60、在数控观测仪上的应用61、在数控轧机上的应用62、在数控冲淬卷生产线上的应用63、在数控旋转阀控制系统上的应用64、在数控连铸设备上的应用65、在数控精密移动平台上的应用一级速比:3,4,5, 7,10;回程间隙:4-6arcmin二级速比:9,15,16,20,25, 28 30, 35, 40, 50, 70, 100;回程间隙:6-8arcmin三级速比:64, 80, 100, 125, 150, 175, 200, 250, 350, 400, 500, 700, 1000 ;回程间隙:7-10arcmin应用范围:CNC 龙门铣床/ CNC 龙门磨床CNC 综合加工机/ CNC深孔加工机CNC 落地搪床/ CNC钻孔机CNC 龙门刨床/ CNC 冲床CNC 重型卧车.立车产业机械包装机械/ 印刷机/ 攻牙机纺织机械/ 弯管机/ 弯板机木工机/ 吹瓶机/ 雕刻机充填机/ 射出成型机/ CNC弹簧机雷射切割机/ 雷射焊接机工厂自动化工业半导体机械设备/ 光电面板机械手臂/ 自动仓储运搬系统医疗产业/ 金属表面处理设备。
KEB伺服电机专用行星减速机
KEB伺服电机专用行星减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
1.5KW台达伺服电机配什么型号的行星减速机

1.5KW台达伺服电机配什么型号的行星减速机KB系列伺服行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
行星齿轮减速机适配松下三菱台达等200W400W伺服马达
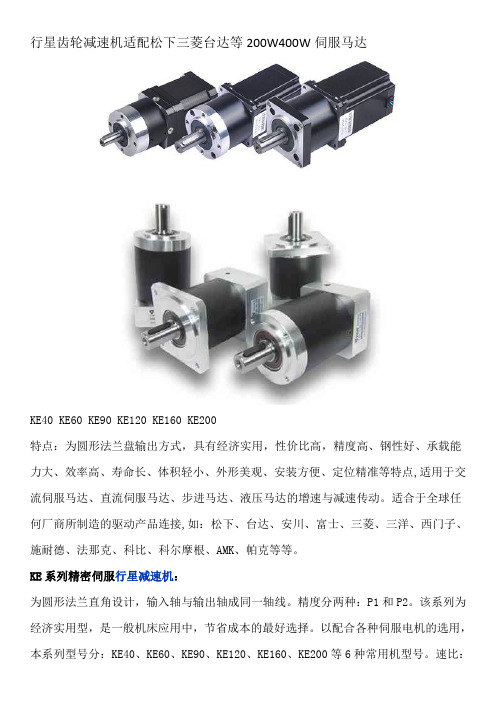
行星齿轮减速机适配松下三菱台达等200W400W伺服马达KE40 KE60 KE90 KE120 KE160 KE200特点:为圆形法兰盘输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等。
KE系列精密伺服行星减速机:为圆形法兰直角设计,输入轴与输出轴成同一轴线。
精度分两种:P1和P2。
该系列为经济实用型,是一般机床应用中,节省成本的最好选择。
以配合各种伺服电机的选用,本系列型号分:KE40、KE60、KE90、KE120、KE160、KE200等6种常用机型号。
速比:4~1000有20多种常用速比可选择;根据速比的大小,其结构分一、二、三行星传动;精度:一级传动精度在5-10弧分,二级传动精度在7-12弧分,三级传动精度在9-15弧分。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。
如:精密机床、焊接设备、自动切割设备、包装设备、太阳能,工业机器人、医疗设备、印刷设备、精密测试仪器等自动化数控设备的应用。
性能和特点:KE系列精密伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。
使用终身免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 195 225 240 1500W 145 4-M8 22/24F7 65 110(H7) 10 130 205 235 250 3000W 165 4-M10 32F7 65 130(H7) 10 150 215 245 360配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 176 301.5 347.5 385.5 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 176 317.5 357.5 395.5 4200W 215 4-M12 42(F7) 115 180(H7) 10 190 352.5 392.5 430.5。
750w的伺服电机涡轮减速机
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE减速机特点:为圆形法兰输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达的减速传动。
精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机精度:一级传动精度在3-8弧分,二级传动精度在8-10弧分;有数百种规格。
技术参数:外形尺寸: 40mm---160mm减速比: 3---512传递力矩: 5Nm---895Nm精密侧隙:≤5arcmin安装方式:任意PLE型号及速比:PLE40 PLE60 PLE80 PLE90 PLE120 PLE160 PLE190 PLE200L1级速比(3 4 5 7 8 10)L2级速比(9 12 15 16 20 25 32 40 64)L3级速比(60 80 100 120 160 200 256 320 512)S1光轴 S2单键轴 S3花键轴、P1精密背隙 P2标准背隙 P0超精密 K1光孔 K2单键孔 K3花键孔行星减速机产品特色:.高效率,达95%以上.低噪音,噪音小于64dB.多速比3-1000范围内可选。
.多功率电机匹配,可配套50W-18kW范围内电机.高输出扭矩,高于其它品牌同规格减速机。
.多种类型电机匹配,如步进,交流、直流电机等。
PLE/AE/IE/PL190系列配汇川伺服电机伺服减速机PLE系列伺服行星减速机可与全球任何厂家所生产的驱动马达产品连接使用,如:安川伺服、台达伺服、东元伺服、埃斯顿伺服、和利时伺服、汇川伺服、广数伺服、大森伺服、华中伺服、凯奇伺服、华大伺服、登齐伺服、雷赛伺服、步进电机、博孚伺服、三洋伺服、松下伺服、富士伺服、三菱伺服、欧姆龙伺服、日立伺服、发格伺服、施耐德伺服、西门子伺服、法那克伺服、科尔摩根伺服、科比伺服、帕克伺服、AMK伺服等伺服电机和步进电机。