海德汉编码器端子定义
海德汉_旋转编码器说明书
旋转编码器2012年11月带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮2目录选型指南标准用途的旋转编码器供电电源3.6至5.25 V DC2) 内部2倍频细分后最大至10 000个信号周期数3) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)42634 ERN 480000至5 000线405选型指南标准用途的旋转编码器内部2倍频细分后最大周期数为10 0002) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)642 50 54 7选型指南电机旋转编码器内部2倍频细分后8 192个信号周期2) 内部5/10/20/25倍频细分后37 500个信号周期8参见产品信息910供电电源3.6至5.25 V DC2)内部2倍频细分后最大至10 000个信号周期数3)内部2倍频细分后8 192个信号周期4)根据用户要求,可提供盲孔轴版选型指南特殊用途的旋转编码器40请见产品概要:应用于电梯行业的旋转编码器请见产品概要:11测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有:•在玻璃上镀硬铬线•在镀金钢带上蚀刻线条,或者•在玻璃或钢材基体上蚀刻三维结构图案。
海德汉公司开发的光刻工艺生产的栅距典型值为50 µm至4 µm。
ES2402-变频器调试操作说明书

ES2402-变频器调试操作说明书1、1、编码器连接(海德汉ECN1313)2、操作器操作说明面板操作说明键盘包括:导航键、一个模式键M、三个控制键(含红色复位键)四维导航键用于控制参数结构并更改参数值。
模式键用于切换各种显示模式,如察看参数,编辑参数、状态。
若选用键盘模式,可用三个控制键控制变频器。
红色停止键可以用于变频器复位。
如果你第一次使用变频器时(单独变频器时,当变频器已安装柜内且到现场后,请不要随便按此操作),变频器恢复出厂值方法:方法是0.00=1233(欧洲标准),然后按红色复位键改变控制模式方法:将0.00=1253(欧洲标准),按红色复位键,然后0.48从OPEN LP更改到SERVO。
按复位键(红色)显示所有菜单方法:0.49=L2,按M键,将0.00=1000,按红色复位键保存软件版本查询:20.01改变模式并恢复出厂值(菜单15到20除外):0.00=1255,按红色复位键3、自学习步骤一、自学习前准备工作:1、使主机脱离负载。
2、通过短接线路的方法,使变频器输出接触器和抱闸打开,同步主机保证封星短接线已经断开,(如3、果满足检修条件,可以不用短接线路,直接按检修上行或下行信号控制器会输出变频器输出接触器,方向及使能信号、抱闸信号)4、设定参数0.48=SERO(闭环伺服)控制模式。
5、确定在变频器的扩展模块槽2上插入编码器分频卡(UniversalEncoder Plus),变频器的扩展模块槽见说明书。
设定参数16.17=06、在连接编码器前最好检查一下参数3.36(变频器提供给编码器的电源电压),出厂缺省值3.36=5V。
预防该参数修改后损坏编码器。
7、连接编码器,把编码器的接口连到变频器的15针编码器的输入口上(而不是PG卡的15针插口),并固定。
8、把参数调到3.02菜单(速度反馈),人为的正、反转动主机同时监控一下菜单界面,是否有正、反速度反馈,若没有的情况下请检修编码器的接线是否正确。
4-3海德汉中文使用说明书

4.5创建和编写程序HEIDENHAIN对话式格式的NC程序.结构一个零件程序由一连串的程序行组成。
右图表示程Array序行的组成。
TNC按上升的顺序对程序行编号。
程序的第一行用BEGIN PGM、程序名和当前的测量单位识别。
以后的行包含下列信息:⏹工件间隔⏹刀具定义,刀具调用⏹进给率和主轴转速,还有⏹仿型路径、循环和其他功能程序的最后一行用END PGM、程序名和当前的测量单位识别。
定义空格:BLK FORM紧接着新的程序建立以后,您定义一个长方体的工件空格。
如果您要定义下一级的空格,按下BLK FORM软键。
这个定义是TNC的图形模拟功能所必需的。
工件空格的两侧类似于X,Y和Z轴,最长可为100 000mm长。
空格由两个角位置来定义:⏹MIN(最小)点:,空格的X,Y和Z座标的最小值,按绝对座标值输入。
⏹MAX(最大)点:空格的X,Y和Z座标的最大值,按绝对座标值或者增量座标值输入。
☞只有您要进行程序的图形测试时,才需定义空格。
创建一个新的零件程序您总是要在运转的编程和编辑模式输入零件程序的。
以一个例子说明程序的开始:选择运转的编程和编辑模式。
调用文件管理器:按下PGM MGT 软键。
选择您要储存新的程序的目录:文件名= OLD.H输入新的文件名,用ENT键确认。
按下MM键或者INCH键,选择测量单位。
TNC变换屏幕布局并开始定义BLK FORM的对话。
工作主轴轴线X/Y/Z?输入主轴轴线。
定义BLK FORM:最小角?按顺序输入X,Y,Z的最小角座标。
-40定义BLK FORM:最大角?100按顺序输入X,Y,Z的最大角座标。
100实例:在NC程序中显示BLK 空格程序开始,名称,测量单位刀具轴线,最小点座标最大点座标程序结束,名称,测量单位TNC自动生成程序行行号,包括BEGIN和END行在内。
如果您不要定义空格,按下DEL键,在工作主轴轴线X/Y/Z?时取消对话!如果BLK FORM的短边和长边的比例超过1:64,则TNC只显示图形。
海德汉伺服驱动编码器

2014年11月伺服驱动编码器有关所有可用接口的全面说明和一般电气信息,参见海德汉编码器接口样本,ID 1078628-xx。
本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
本样本不是海德汉公司全线产品的介绍。
只适用于选择伺服驱动编码器。
选型表是关于海德汉公司所有电机驱动编码器的概要信息以及最重要的技术参数信息。
技术特性说明是关于电机驱动旋转编码器、角度编码器和直线光栅尺的基本信息。
有关安装信息和详细技术参数,参见专为驱动技术开发的旋转编码器。
其它旋转编码器信息,参见其单独产品样本。
有关选型表中直线光栅尺和角度编码器的安装、技术参数和尺寸信息,详见相应的产品样本。
样本旋转编码器产品概要电梯行业的旋转编码器样本直线光栅尺用于NC数控机床样本敞开式直线光栅尺产品概要应用于有爆炸危险环境中的旋转编码器样本内置轴承角度编码器样本无内置轴承角度编码器样本模块式磁栅编码器August 2012Längenmessgerätefür gesteuerteWerkzeugmaschinen März 2012OffeneL Januar 2009ProduktübersichtDrehgeberfür explosionsgefährdeteBereiche (ATEX)August 2013Winkelmessgerätemit EigenlagerungSeptember 2012MagnetischeE目录4伺服驱动编码器伺服驱动的控制系统需要测量系统提供位置和速度控制单元所需的反馈信息和电子换向信号。
编码器性能对电机的重要特性具有决定性影响,例如: •定位精度 •速度稳定性•带宽,它决定对驱动指令信号的响应速度和抗干扰性能 •功率损失 •尺寸 •噪音 •安全数字位置和速度控制系统海德汉公司为旋转电机和直线电机提供所需的全面产品:•带或不带换向刻轨的增量式旋转编码器和绝对式旋转编码器 •增量式和绝对式角度编码器 •增量式和绝对式直线光栅尺 •增量式模块型编码器旋转编码器5旋转编码器“数字”驱动系统的电机(数字位置和速度控制)本样本中的所有海德汉编码器都具有方便电机制造商安装和接线的特点,而且安装和接线成本低。
海德汉编码器的知识讲解

/
海德汉编码器的知识讲解
海德汉编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可 用以通讯、传输和存储的信号形式的设备。 编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码 尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码 器可分为增量式和绝对式两类。 增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成 计数脉冲,用脉冲的个数表示位移的大小。
Байду номын сангаас
绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与 测量的起始和终止位置有关,而与测量的中间过程无关。
海德汉编码器/
海德汉编码器的知识讲解
海德汉编码器/
海德汉编码器的知识讲解
海德汉编码器/
海德汉编码器工作原理

海德汉编码器工作原理
海德汉编码器是一种用于数字信号传输的编码方式,其工作原理是通过将数字信号转换成模拟信号,然后通过模拟信号的方式传输数据。
具体地说,海德汉编码器将输入的二进制数据按照一定规则进行组织和编码,生成一系列模拟信号。
这些模拟信号可以是连续的正弦波信号或方波信号。
编码器根据输入信号的高低电平状态和特定的编码规则,生成相应的模拟信号。
海德汉编码器使用了差分编码的技术,即在编码过程中考虑了前一位的编码值。
这样可以减少信号传输过程中的误差和干扰,提高传输的可靠性。
通过使用差分编码,编码器可以根据前一位的信号状态确定当前位的信号状态,从而保持连续的信号传输,减少传输过程中的突变和错误。
在海德汉编码中,每一位的编码取决于该位和前一位的信号状态。
如果两位的信号状态相同,则编码为0;如果两位的信号
状态不同,则编码为1。
通过这种编码方式,海德汉编码器可
以将二进制数据转换为连续的模拟信号,用于信号传输。
海德汉编码器在数字通信系统中具有较好的抗干扰能力和传输可靠性,但同时也引入了一定的延迟。
因为编码器需要考虑前一位的信号状态才能确定当前位的信号状态,所以会增加信号传输的延迟。
但在实际应用中,海德汉编码器的优点还是显著的,特别是在长距离的数字信号传输中更为常见。
海德汉-光栅与编码器介绍
位置检测装置作为数控机床的重要组成部分,其作用就是检测位移量,并发出反馈信号与数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件使其向着消除偏差的方向运动,直至偏差等于零为止。
为了提高数控机床的加工精度,必须提高检测元件和检测系统的精度。
其中以编码器,光栅尺,旋转变压器,测速发电机等比较普遍,下面主要对光栅和编码器进行说明。
光栅,现代光栅测量技术简要介绍:将光源、两块长光栅(动尺和定尺)、光电检测器件等组合在一起构成的光栅传感器通常称为光栅尺。
光栅尺输出的是电信号,动尺移动一个栅距,输出电信号便变化一个周期,它是通过对信号变化周期的测量来测出动就与定就职相对位移。
目前使用的光栅尺的输出信号一般有两种形式,一是相位角相差90度的2路方波信号,二是相位依次相差90度的4路正弦信号。
这些信号的空间位置周期为W。
下面针对输出方波信号的光栅尺进行了讨论,而对于输出正弦波信号的光栅尺,经过整形可变为方波信号输出。
输出方波的光栅尺有A 相、B相和Z相三个电信号,A相信号为主信号,B相为副信号,两个信号周期相同,均为W,相位差90o。
Z信号可以作为较准信号以消除累积误差。
一、栅式测量系统简述从上个世纪50年代到70年代栅式测量系统从感应同步器发展到光栅、磁栅、容栅和球栅,这5种测量系统都是将一个栅距周期内的绝对式测量和周期外的增量式测量结合了起来,测量单位不是像激光一样的是光波波长,而是通用的米制(或英制)标尺。
它们有各自的优势,相互补充,在竞争中都得到了发展。
由于光栅测量系统的综合技术性能优于其他4种,而且制造费用又比感应同步器、磁栅、球栅低,因此光栅发展得最快,技术性能最高,市场占有率最高,产业最大。
光栅在栅式测量系统中的占有率已超过80%,光栅长度测量系统的分辨力已覆盖微米级、亚微米级和纳米级,测量速度从60m/min,到480m/min。
测量长度从1m、3m达到30m和100m。
二、光栅测量技术发展的回顾计量光栅技术的基础是莫尔条纹(Moire fringes),1874年由英国物理学家L.Rayleigh首先提出这种图案的工程价值,直到20世纪50年代人们才开始利用光栅的莫尔条纹进行精密测量。
海德汉说明书(模板)

海德汉说明书海德汉说明书篇一:海德汉说明书HEI DEN HAI N T NC426TNC430软件编号280-476XX 280-477X X 使用说明书对话式编程可视显示器上的控制器分割屏幕切换加工和编程模式屏幕上选择功能的软键变换软键行改变屏幕设置(仅B C120)输入字符的键盘文件名称注解 IS编程机床运转模式手动操作方式电控手轮M DI定位单行程序运行全序列程序运行编程模式编程和编辑试运行程序/文件管理,TN C功能选择或删除程序和文件,外部数据传送在程序中输入程序调用命令M D功能显示NC出错信息帮助文本袖珍计算器移动光标,直接指向程序行、循环和参数功能移动高亮显示部直接转到程序行、循环和参数功能进给率和主轴转速修调旋钮编程路径移动仿型进刀和退刀FK自由仿型编程直线圆心和极座标极心定圆心圆定半径圆切线连接圆弧倒角修圆尖角刀具功能输入和调用刀具长度和半径循环、子程序和程序段重复定义和调用循环输入和调用子程序及程序段重复的标签程序中程序停止运行在程序中输入触头功能座标轴和数字,编辑选择座标轴或在程序中输入? 座标轴? 数字键小数点改变代数符号极座标增量座标Q参数实际位置归零跳过对话提问,删除字确认输入和恢复对话结束程序行清除数字输入或者TNC出错信息中断对话,删除程序段 TN C 型号,软件和性能本说明书按照下述NC软件编号,叙述了T NC提供的功能和特性。
海德汉编码器和海德汉光栅尺使用的各种参数
海德汉编码器和海德汉光栅尺使用的各种参数海德汉海德汉编码器和海德汉光栅尺使用的各种参数10编程:Q参数10.1原理和概述你可以在一个零部件加工程序中编写同类零部件的程序,你只须输入称作Q参数的变量取代固定的数字值即可。
Q参数可以代表诸如以下的信息:□坐标值□进给率□RPM(重复数/分)□循环数据Q参数也可以帮助你编写通过数学功能定义的外形轮廓。
同时,你也可以使用Q参数根据逻辑状况执行机械加工步骤。
与FK编程连用,可以将无法NC-兼容的外形轮廓与Q参数结合。
Q参数由字母Q和0到299之间的一个数字命名。
其分组情况分为三类:含义范围普遍适用参数,适用于所有TNC内存记忆的程序Q0到Q99为特殊TNC功能设定的参数Q100到Q199主要用于循环的参数,适用于所有存储在TNC内存中的程序Q200到Q399编程说明在一个程序中可以混用Q参数和固定数字值。
Q参数可以被指定给-99.999,9999和+99 999.9999之间的数字值。
TNC可以计算十进制小数点前57位到小数点后7位的范围(32位数据的计算范围相当于十进制数值4 294 967 296)。
一些Q参数总是被TNC指定给同样的数据。
例如,Q108总是被指定给当前刀具半径,可参见368页的“预先指定Q参数”。
如果你在OEM循环中使用Q60至Q99之间的参数,须通过MP7251定义这些参数是否仅用于OEM循环,还是全部适用。
338调用Q参数功能在编写零部件加工程序时,按下“Q”键(位于数字值输入键盘,-/+键的下方)。
然后,TNC会显示以下软键盘:功能组软键盘基础算术(指定,加减乘除,平方根) BASICARITHM.三角函数功能TRIGO-NOME TRY计算循环功能CIRCLECALCU-LATION如果/则条件,转移JUMP其它功能DIVERSEFUNCTION直接输入公式FORMULA33910.2 同类零件-Q参数代替数字值Q参数功能FN0:ASSIGN指定数字值给Q参数。
海德汉公司MRP系列角度编码器模块说明书

角度编码器模块05/20212海德汉公司的MRP系列角度编码器模块由角度编码器和高精度轴承组成,并已调整至理想状态。
该模块启动扭矩极小,拥有高测量精度、高导向精度、极高分辨率、优异的重复精度和运动平滑性。
模块式的结构设计和整体进行测试,因此,这款角度编码器模块易于运输和安装。
以下信息••内置轴承角度编码器和••海德汉接口电子电路欢迎索取,或访问海德汉官网• 。
结构和应用SRP角度编码器模块还内置了力矩电机。
也就是在小巧紧凑的一个模块中集成了•电机、高精度轴承和超高精度编码器。
本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
有关产品所遵循的标准(ISO,EN等)仅以样本中的标注为准。
目录45可重复的导向精度:轴承的决定性特性气浮轴承在空载时的绝对导向精度通常优于滚动轴承的导向精度。
然而,在许多应用中,重要的是轴承最高可重复的导向精度。
在此方面,海德汉角度编码器模块是替代气浮轴承转轴的理想选择。
这是因为海德汉滚动轴承拥有极高的重复精度,而且海德汉滚动轴承的刚性高于气浮轴承至少10倍。
因此,海德汉滚动轴承是受力轴应用的高精度解决方案。
此外,滚动轴承通常对冲击载荷不敏感,而且不需要可调节的压缩空气,因此工作更可靠和更易于使用。
应用领域适用于角度编码器模块的应用范围包括:中低转速运动和中等负载的高导向精度到超高导向精度和极高重复精度应用。
特别能满足计量应用的独特要求。
因此,典型应用包括:计量仪器、测量机的高精度回转工作台和电子工业的圆晶运送机。
角度编码器模块甚至也能用于小负载机床,例如电加工机床或激光加工机床。
晶片运送紧凑型摆动装置高精度回转工作台激光跟踪仪实用的解决方案海德汉角度编码器模块中的轴承可根据客户的特定要求适配。
按照要求相应和分别调整预紧量、润滑、接触角和材质。
更多信息,请与海德汉联系。
•测量精度和方位精度海德汉角度编码器模块整个组件的精度取决于内置角度编码器的测量精度和滚动轴承的导向精度。
海德汉编码器调零方法
海德汉编码器调零方法
一、海德汉编码器简介
海德汉编码器是一种高精度的位移测量设备,广泛应用于各种工业自动化领域。
它通过光电原理,将旋转或线性位移转换为数字信号,便于计算机或其他控制系统读取和处理。
为了确保编码器的测量精度,定期进行调零操作是非常必要的。
二、海德汉编码器调零方法
1.准备工作
在进行调零前,请确保以下准备工作已做好:
(1)切断电源,确保编码器停止工作。
(2)准备好调零工具,如一字螺丝刀、扳手等。
(3)了解编码器的结构,以便正确操作。
2.调零步骤
(1)松开编码器上的固定螺丝,拆下外壳。
(2)找到编码器的零点标记,通常为一个凹槽或标记线。
(3)将编码器转动至零点标记处,使其与旋转轴对齐。
(4)重新固定编码器外壳,紧固螺丝。
3.注意事项
(1)在调零过程中,切勿让编码器受到外力冲击,以免影响测量精度。
(2)调零后,请重新检查编码器的运行情况,确保恢复正常工作。
三、调零后的维护与检查
(1)定期检查编码器的零点,如发现异常,及时重新调零。
(2)保持编码器周围环境的清洁,避免灰尘和油污影响光电传感器的工作。
(3)定期加注润滑油,确保旋转轴顺畅运行。
四、总结与建议
通过对海德汉编码器的调零方法的学习,我们可以确保编码器在长时间运行过程中保持较高的测量精度。
同时,掌握正确的调零方法和注意事项,有助于延长编码器的使用寿命,提高生产效率。
海德汉编码器接口说明

全部输出
< 20 s < 5 s
(额定值)
其它信号波形
A、B、R测量值为示波器用差分测量的结果
截止频率 典型信号幅值与输出频 率关系曲线 (取决于编码器)
信号幅值 [%]
-3 dB截止频率 -6 dB截止频率
输出信号频率 [kHz]
4
监测增量信号
建议用以下灵敏度电平监测信号幅值M:
下阈值:
0.30 VPP
海德汉屏蔽电缆 例如PUR [4(2 x 0.14 mm2) + (4 x 0.5 mm2)] 最长150 m,分布电容为90 pF/m时 6 ns/m
这些值用于确定后续电子电路规格。有关编码器公差范围,参见技术参数部分。 对于无内置轴承编码器,建议工作初期用更小公差(参见安装说明)。
信号周期 360°电子角
用于位置测量的推荐测量步距,参见技术 参数。对于特殊应用,可选其它分辨率。
短路稳定性 工作时不允许输出端短路。例外情况:对 于5 V DC ± 5 %供电电压的编码器,如果 一路信号输出短时与0 V或UP短路不会导致 编码器失效。
短路发生在
20 °C
125 °C
一路输出
< 3 min < 1 min
请注意: 严禁超过最大允许轴速或运动速度, 原因是可能造成不可修正的计数错误。
接口 增量信号 参考点信号 脉冲宽度 延迟时间 故障检测信号 脉冲宽度
信号幅值 允许负载
切换时间 (10 %至90 %) 连接电缆 电缆长度 传输时间
方波信号 TTL
两路TTL方波信号Ua1,Ua2与其反相信号,
一个或多个TTL方波脉冲Ua0以及其反相脉冲 90°电子角(如果需要其他脉冲宽度,可按要求提供) |td| 50 ns
ES+海德汉1313编码器参数表
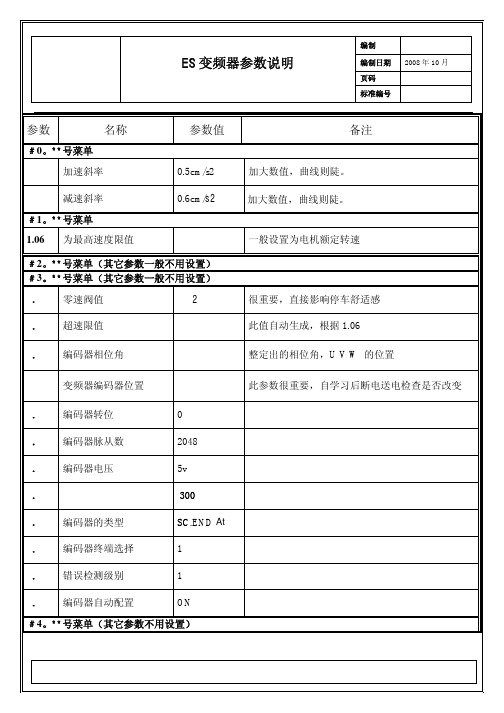
ON At SC.END SC 号菜单(其它参数一般不用设置)号菜单(其它参数一般不用设置)加大数值,曲线则陡。
页码标准编号参数名称 参数值 备注﹟0。
**号菜单 0¡03 加速斜率 0.5cm/s2 0¡04减速斜率0.6cm/s2﹟1。
**号菜单 1.06为最高速度限值一般设置为电机额定转速﹟2。
** ﹟3。
** 3.05 零速阀值 2 很重要,直接影响停车舒适感 3.08 超速限值 此值自动生成,根据1.06 3.25 编码器相位角 整定出的相位角,U V W 的位置3. 29变频器编码器位置此参数很重要,自学习后断电送电检查是否改变 3.33 编码器转位 0 3.34 编码器脉从数 2048 3.36 编码器电压 5v3.37 3003.38 编码器的类型 3.39 编码器终端选择 1 3.40 错误检测级别 1 3.41 编码器自动配置﹟4。
**号菜单(其它参数不用设置)加大数值,曲线则陡。
页码标准编号4.07 对称电流限值200%4.11 转矩方式选择44.12 电流给定滤波器12ms降低电机噪音4. 13 电流环比例增益自学习生成4.14 电流环积分增益自学习生成4.15 电极热时间常数894.23 电流给定滤波器110ms降低电机噪音,﹟5。
**号菜单(其它参数不用设置)5.07 电机额定电流A按铭牌设定5.08 电机额定速度Rmp按铭牌设定5.09 电机额定电压380V5.11 电机极数205.18 PWM开关频率选择6K HZ﹟6。
**号菜单(不用设置)﹟7。
**号菜单(不用设置)7.10=0 7.14=0﹟8。
**号菜单(其它参数不用设置)8.21 24端子功能选择10.02 运行使能(10.02变频器工作)8.22 25端子输入源18.38 相当于我们主板的多端速输出Y15 8.23 26端子输入源18.37 相当于我们主板的多端速输出Y148.24 27端子功能选择19.44 顺时针旋转(上升)8.25 28端子功能选择18.44 逆时针旋转(下降)可以通过18.45=1 改变运行方向8.26 29端子输入源18.36 相当于我们主板的多端速输出Y13 8.31 24端子输入(出)选择ON 0:输入功能1:输出功能8.3225端子输入(出)选择OFF 0:输入功能1:输出功能﹟16**菜单(其他参数不用设置)页码标准编号16.17 编码器故障检测级别016.24 编码器分频输出源3.2916.25 编码器分频输出分子0.204816.26 编码器分频输出分母1.638416.28 编码器分频输出方式 4﹟18。
海德汉角度编码器
2013年9月内置轴承角度编码器以下产品信息•无内置轴承角度编码器•模块式磁栅编码器•旋转编码器•伺服驱动编码器•敞开式直线光栅尺•NC数控机床用直线光栅尺•接口电子电路•海德汉数控系统欢迎索取,或访问本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
内置轴承和定子联轴器的角度编码器分离式联轴器内置轴承的角度编码器有关所有可用接口和一般电气信息,参见海德汉编码器接口样本。
2目录4海德汉角度编码器角度编码器通常是指精度高于±5"和线数高于10 000的编码器。
角度编码器用于精度要求在数角秒以内的高精度角度测量。
举例:•机床回转工作台 •机床摆动铣头 •车床C轴 •齿轮测量机•印刷机的印刷装置 •光谱仪 •望远镜等等与之对应的旋转编码器用于精度要求略低的应用,例如自动化系统,电气驱动等其它许多应用。
安装在机床内回转工作台中RCN 8000角度编码器RCN 8580型绝对式角度编码器角度编码器的机械机构有:内置轴承、空心轴和定子联轴器的角度 编码器由于定子联轴器的结构和安装特点,轴进行角加速时,定子联轴器必须只吸收轴承摩擦所导致的扭矩。
因此,这些角度编码器具有出色的动态性能。
对于定子联轴器的角度编码器,技术参数中的系统精度已包括联轴器的偏差。
RCN、RON 和RPN 角度编码器带定子联轴器,ECN 的定子联轴器安装在编码器外。
其它优点还有:•尺寸小,适用于安装空间有限地方 •空心轴直径最大达100 mm,为电源线 穿线等要求提供等所需空间。
•安装简单选型指南绝对式角度编码器参见第6/7页增量式角度编码器参见第8/9页5分离式联轴器内置轴承角度编码器实心轴的ROD 系列角度编码器特别适用于轴速高及/或需较大安装公差的应用。
联轴器允许±1 mm 的轴向公差。
“选型指南”的第8/9页无内置轴承角度编码器无内置轴承ERP、ERO 和ERA 系列角度编码器(模块式角度编码器)适用于安装在机器部件或装置上。
海德汉 Heidendain ND280 cn

I S
R
Abb. I.4 名义位置 S,实际位置 I 和待移动距离 R
16
I 使用 ND 280 数显装置
工件绝对位置
工件上的每个位置都唯一地由其绝对坐标值确定 (参见 Abb. I.5) 。 举例:位置 1 的绝对坐标:Z = 20 mm 如果用绝对坐标值按照图纸要求在工件上钻孔或铣工件,需使刀具或 长度计移至坐标值处。
Z Y X
Abb. I.7 直线位置光栅尺,在此为 X 轴
操作手册
ND 280
Zhongwen (zh-CN) 9/2008
ND 280 显示屏
1
2
3 4 5
ND 280 前面板
7
6
控制和显示
1 状态栏 当前操作模式:实际值,待移动距离。 当前显示模式,输入接口 X1 SCL 显示为黑色:缩放系数被激活。
COMP 显示为黑色:误差补偿或轴误差补偿对当前显示轴有效。
ND 280
7
II 安装,技术参数 ..... 35
II.1 系统安装和电气连接 ..... 36 其中包括 ..... 36 选装附件 ..... 36 安装 ..... 37 环境条件 ..... 37 固定位置 ..... 37 ND 280 - 固定和安装 ..... 37 电磁兼容性 CE 相符性 ..... 38 电气连接 ..... 39 电气要求 ..... 39 电源接头连线 (参见 Abb. II.3)..... 39 防护性接地 (地线)..... 39 预防性维护或修理 ..... 40 连接编码器 ..... 40 D-sub 接头 X1 (15 针,孔式)用于连接以下输入信号 ..... 40 II.2 系统设置 ..... 42 系统设置菜单 ..... 42 设置编码器 ..... 43 增量式直线光栅尺 ..... 44 增量式角度编码器 ..... 45 绝对式编码器 ..... 46 配置显示 ..... 46 直线光栅尺 ..... 46 角度编码器 ..... 46 计数器设置 ..... 47 误差补偿 ..... 48 线性误差补偿 (不适用于旋转编码器)..... 49 非线性误差补偿 ..... 50 设置串口 ..... 54 设置数据接口 ..... 54 诊断 ..... 56 键盘测试 ..... 56 显示测试 ..... 56 编码器测试 ..... 57 电源 ..... 59 II.3 编码器参数 ..... 60 数值表 ..... 60 海德汉直线光栅尺 ..... 60 海德汉角度编码器 ..... 61
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无齿轮编码器接线示例图:
注:编码器型号Heidehain(海德汉)ERN 1387 分辩率:2048
速度:0~15000rpm
供应电源:5V±5% max 150mA(withy no load)
20℃起动转矩:≤ 0.01Nm
Heidehain(海德汉)ERN 1387插针分布图
编码器型号
6b 2a 3b 5a 4b 4a 7b 1a 2b 6a 1b 5b
A B R C D
Up+5V 0V + - + - + - + - + -
Green yellow Blue Red gray pink white Brown black violet Gray
/pink
White
/green
ERN1387 Pin5 Pin6 Pin8 Pin1 Pin3 Pin4 Pin11 Pin10 Pin12 Pin13 Pin9 Pin7 ERN487 Pin5 Pin6 Pin8 Pin1 Pin3 Pin4 Pin10 Pin11 Pin13 Pin12 Pin9 Pin7
注:1)Pin1~pin13为变频器编码器接口端
2)同步电机变频器的跳线为:S11~S16为ON,S18~S23跳为A(对SESC型的编码器)。
3)以上的编码器接口都是15针的VGA接口.
海德汉ERN1321编码器与安川IP
万源的输出端子颜色号———变频器的PG-X2卡
红——————————2(0V),
橙——————————3(5V),
黄——————————4(A+),
绿——————————5(A-),
蓝——————————6(B+),
紫——————————7(B-),
灰——————————8(Z+),
白——————————9(Z-)
海德汉编码器线号定义:
编码器端子号定义6b 6a 5b 5a 4b 4a 2a 1a
A B Z 5V 0V + -+ -+ -
PG-X2卡号4# 5# 6# 7# 8# 9# 3# 2#
海德汉ERN 1387配西威变频器
注:
海德汉1313 的脚码仅有1a-6a;1b-6b,
图上的7a,7b实际上是没有的。
编码器端子号定义1a 2a 3a 4a 5a 6a 1b 2b 3b 4b 5b 6b DATA A+B+CLOCK 5V CLOCK B-0V A-DATA
ES定义Z+A+B+W-5V W+B-0V A-Z-海德汉1313编码器配CT-ES变频器。