第四章 船舶稳性教案
船舶原理教案2(稳性和吃水差)
G G1 =
D
GG1 tgθ = DGM
3.横倾
W G1(P q2 ) W1L1 D B1
4.表达式
tg θ =
Ply DGM
第四章 稳性---初稳性方程的应用(1)
(2)力矩平衡法 -P
M
θ
I
+P
ly
W W1
L1 L
θ
MS
第四章 稳性---初稳性方程的应用(1)
(2)力矩平衡法
根据D对应的平均吃水查对应静水力曲 线图得到 zm
GM = z m − z g
第四章 稳性---初稳性方程的应用(1)
船内重 物垂移
W ~ G ( P ~ q ) 1.初始状态 WL D~B
M S = D g G M sin θ
如图示,根据平行力移动原理有:
要调整船舶稳性需考虑重 2.垂移 物垂移,或因重物垂移需 考虑对稳性的影响。
重物横向偏于一侧装卸
第四章 稳性---初稳性方程的应用(2)
液体重物装卸
第四章 稳性---初稳性方程的应用(2)
大量 装卸 问题
第四章 稳性---静稳性图、横倾力矩
静稳性图
初稳性方 程的用途 局限性 静稳性图 静稳性图 资料 稳性交叉 曲线
稳性方程: 用途:
局限性: 局限性1: 局限性2:
第四章 稳性---静稳性图、横倾力矩
船舶原理
船舶原理
湛江海洋大学航海学院
船舶原理----第四章 稳性
§4-1 §4-2 §4-3 §4-4 §4-5 §4-6 §4-7 §4-8 稳性及其分类和初稳性方程 稳心半径及其与船型的关系 初稳性方程的应用---船内问题 初稳性方程的应用---少量、大量装卸问题 静稳性图、横倾力矩 动稳性图 稳性衡准 船长的责任
第四章 船舶稳性
第四章船舶稳性第一节船舶稳性的基本概念(一)船舶平衡的3种状态1、稳定平衡>0G点在M点之下,GM>0,MR2、随遇平衡G点与M点重合,GM=0,M=0R3、不稳定平衡<0G点在M点之上,GM<0,MR(二)稳性的定义船舶稳性是指船舶受给定的外力作用后发生倾侧而不致倾覆,当外力消失后仍能回复到原来的平衡位置的能力。
(三)稳性分类分类方法: 按倾斜方向、倾角大小、倾斜力矩性质、船舱是否进水┏破舱稳性稳性┫┏初稳性(小倾角稳性)┃┏横稳性┫┏静稳性┗完整稳性┫┗大倾角稳性┫┗纵稳性┗动稳性其中,倾角小于等于10-15度称为小倾角,否则称为大倾角。
倾斜力矩性质指静力或动力,或者说有无角速度、角加速度。
第二节船舶初稳性(1)(一)船舶初稳性的基本标志1.稳心M 与稳心距基线高度KM船舶小倾角横倾前、后其浮力作用线交点称为横稳心,简称稳心。
稳心M距基线的垂向坐标称为稳心距基线高度。
2.初稳性的衡准指标稳心M至重心G的垂距称为初稳性高度GM。
初稳性高度GM是衡准船舶是否具有初稳性的指标。
初稳性高度大于零,即船舶重心在稳心之下,船舶就有初稳性。
3.初稳性中的假设(对于任一给定的吃水或排水量)(1)小倾角横倾(微倾);(2)在微倾过程中稳心M和重心G的位置固定不变;(3)在微倾过程中浮心B的移动轨迹是一段以稳心为圆心的圆弧;(4)在微倾过程中倾斜轴过漂心。
(二)初稳性高度GM的表达式GM=KB+BM-KG=KM-KG第二节 船舶初稳性(2)(三) 初稳性高度的求取1、 KM 可在静水力曲线图、静水力参数表或载重表中查取。
2、 KG 的计算式中,P i —— 组成船舶总重量(含空船重量等)的第i 项载荷,tZ i —— 载荷P i 的重心距基线高度,m3、Z i 确定(1)舱容曲线图表查取法船舶资料中通常有各个货舱和液舱的舱容曲线图或数据表,利用舱容曲线图表,可方便确定舱内散货或液货的重心高度Z i ,方法如下:i )对于匀质散货或液货,已知货堆表面距基线高度,在图中左纵轴上对应点做水平线交舱容中心距基线高度曲线得B 点,过B 点做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。
船舶稳性计划书

船舶稳性计划书1. 引言船舶稳性是船只安全运行的一个重要方面,稳性计划书是船舶设计、建造和运营过程中必不可少的文件。
本文档旨在介绍船舶稳性计划书的编制内容和计划实施过程。
2. 船舶基本信息在船舶稳性计划书中,首先需要包含船舶的基本信息,包括但不限于船舶名称、船舶种类、建造厂商、建造年份、总吨位、船长、船宽、吃水、载重能力等。
在编制船舶稳性计划书的过程中,需要根据船舶的基本信息来进行稳性计算和分析。
3. 船舶稳性计算船舶稳性计算是船舶稳性计划书的核心内容。
在计算过程中,需要考虑船舶的外形、布局、重心位置等因素,以及一系列稳性指标,如倾覆稳性曲线、绝对稳性曲线、永久性稳性曲线等。
稳性计算可以基于船舶的设计图纸和实际测量数据进行。
计算结果应该清晰地呈现在船舶稳性计划书中,并且应该包含详细的计算过程和假设条件。
4. 船舶稳性分析稳性计划书中的稳性分析是在稳性计算的基础上进行的。
稳性计算提供了船舶在各种载荷和运行状态下的稳定性数据,而稳性分析则是根据这些数据来评估船舶的稳定性和安全性。
在稳性分析过程中,应该考虑各种情况下的稳定性,如平稳航行、转向、起重作业等。
分析结果应该包括稳定性能评估、稳定性缺陷和改进措施等内容。
此外,还需要进行一系列风险评估,以确保船舶在各种情况下都能保持稳定。
5. 船舶稳性改进措施根据稳定性计算和分析的结果,船舶稳性计划书应提供相应的改进措施和建议。
这些改进措施可以包括但不限于以下几个方面:•调整船舶布局和重心位置,以增强稳定性;•安装稳定设备,如稳定翼、滚筒、重力水舱等;•优化载重分布,确保船舶在载荷变化时仍能保持平稳;•加强船舶的自动化控制系统,提高操纵稳定性。
改进措施应根据具体的船舶情况进行定制,确保船舶在各种工况下都能保持良好的稳定性。
6. 实施计划船舶稳性计划书的实施计划是确保计划能够顺利进行的重要环节。
实施计划应包括以下几个方面的内容:•计划的时间表和里程碑;•负责实施计划的人员和部门;•实施计划所需的资源和预算;•监督和评估计划执行的方法和指标。
船舶完整稳性
第2章完整稳性衡准第1节一般规定2.1.1当船上设置除毗龙骨以外的防摇装置时,应确保该装置工作时上述衡准仍能保持,且供电系统的失效或装置的故障不会导致船舶无法满足本篇的有关要求。
2.1.2应在必要的范围内考虑一些不利于稳性的影响因素,诸如顶部和舷部结冰、甲板上浪O2.1.3考虑到类似由于吸水和结冰引起的重量增加,及由于燃料和备品的消耗引起的重量减少等因素,应为航程的各阶段的稳性安全界限做出规定。
2.1.4每船均应备有1份由验船部门批准的稳性手册,该手册应含有足够的资料以使船长能够按本篇规定的使用要求操纵船舶。
2.1.5如果最小营运初重稳距(GM)曲线(或表)或者最大重心坐标(KG)曲线(或表)用于表示符合完整稳性衡准,这些限制曲线应包含整个营运纵倾范围,但验船部门认为纵倾影响不大时除外。
当上述曲线或表格无法囊括营运纵倾,船长应当核实作业情况没有偏离经设计的装载工况,或通过计算证实考虑到纵倾影响后该装载工况满足稳性衡准。
应为气象衡准数,这是稳性衡准数之一!图 2.2.2.12.2.2.2动稳性曲线因进水角为影响而中断时,除了用经过动稳性曲线中断处的割线代替上 述切线外,其余均同上述2.221所述(如图2.222)。
图 2.2222.2.3风压倾侧力臂。
按下式计算:Z P∖Zl v = -------- m v9810Δ式中:p —单位计算风压,p a ;按225要求计算;4——船舶装载水线以上受风面积,(包括甲板上装载物),m 2,按226要求计算;Z ——计算风力作用力臂,m ;按224计算;」——所核算装载情况下船舶排水量,32.2.4 计算风力作用力臂Z 为在所核算装载情况下船舶正浮时受风面积中心至水线的垂向距离。
受风面积中心应用通常确定图形形心的方法求得。
2.2.5 单位计算风压P 应按计算风力作用力臂Z 及不同航区由表2.2.5线性插值查得:单位计算风压P (Pa)表2.2.5本来2000规则已经回归成了光顺曲线的数据,应作为一个鱼腥味的亮点,现在又抄回去了,真佩服这复旧的能力!其航区之间有L83和2.00倍的关系。
“船舶稳性”定义的预备知识及教学

“船舶稳性”定义的预备知识及教学◎ 邹忠胜 三亚航空旅游职业学院摘 要:《船舶结构与货运》是航海技术专业的主干课程,“船舶稳性”难点之一。
“船舶稳性”定义在课程中起到承上启下的作用。
根据教学反馈,部分学生对定义的掌握较差,进而影响后续内容的学习。
基于此,本文梳理了“船舶稳性”形成过程所需要的预备知识,探索其教学过程,以期提高课堂教学质量。
关键词:船舶结构与货运 船舶稳性 预备知识 云班课1.引言在《海船船员培训大纲(2016版)》中,明确了稳性的学习要求。
对于营运船舶来说,船舶稳性是至关重要的。
如果稳性过小,船舶将不能抵御恶劣天气和较大的风浪而导致沉没;如果稳性过大,船舶结构和设备受力过大容易损坏,同时船上人员也会感觉不舒服;如果稳性丧失,很小的外力矩就会导致船舶倾覆。
因此,对于航海技术的学生来说,掌握船舶稳性是必要而且是重要的。
以三亚航空旅游职业学院的学生为例,他们普遍对“船舶稳性”相关知识的掌握较差,主要表现:定义是船舶稳性的理论基础,学生对此一知半解,影响后续知识的学习,如大倾角静稳性、船舶动稳性、船舶吃水差和船舶强度;对初稳性影响的计算未能深刻理解其物理意义,不能灵活应用和解决实际问题。
因此,深刻领会其定义是学习“船舶稳性”的关键。
教材指出:船舶稳性是指船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船舶能自行恢复到初始平衡状态的能力。
目前笔者所在学校所用的教材为《船舶结构与货运》,用于海船船员适任考试培训,受学制为专科所限,其先修课程没有安排《船舶原理》作为铺垫。
而教材中关于“船舶稳性”的预备知识较为分散,如船舶结构、船舶重力/重心、船舶浮力/浮心、船舶坐标系、稳心等分散在教材的不同章节,学生不能系统应用相关知识理解“船舶稳性”定义;力矩/力偶的相关内容虽为高中物理知识,但部分学生限于学习基础,不能很好理解,这些原因导致定义理解起来无从着手。
因此,学习“船舶稳性”前,学生系统学习相关的预备知识是很有必要的。
第四章 稳性、载重线、不沉性、吨位丈量

第四章 稳性、载重线、不沉性、吨位丈量第1节 稳 性4.1.1 一般要求4.1.1.1 下列船舶应按本节规定核算船舶稳性:(1)新船;(2)初次检验的现有船舶;(3)船舶因改装、改建或修理使船舶稳性恶化或空船状况变化较大的现有船舶;(4)对其船舶稳性发生怀疑的现有船舶。
4.1.1.2 船舶一般应按《渔业船舶法定检验规则》有关规定进行稳性核算和倾斜试验。
4.1.1.3 对于缺少资料的现有船,可按4.1.3规定的简易衡准方法校核稳性。
4.1.1.4 船舶稳性计算虽已符合本章的要求,但船长仍应注意船舶装载及气象、海况、航向等情况,谨慎驾驶和操作。
在船舶遭遇特殊情况或紧急情况而采取应变措施时,应注意船舶的稳性,防止发生倾覆的危险。
4.1.1.5 本节4.1.3、4.1.4的规定不适用于高速船。
4.1.2 完整稳性4.1.2.1 船舶应具有足够的稳性,稳性指标应满足4.1.1.2或4.1.3的要求。
4.1.2.2 高速船的完整稳性除满足以下要求外,尚应满足4.1.1.2要求。
.1 在换证检验时,应核查空船排水量和重心纵向位置,并与已批准的稳性资料相比较,如空船排水量的偏差值超过2%,或重心纵向位置的偏差值超过l %船舶垂线间长时,则应重新进行倾斜试验。
.2 船舶最大复原力臂所对应的横倾角应不小于25º,如进水角小于最大复原力臂所对应的横倾角,则进水角即为最大复原力臂所对应的横倾角。
.3 对遮蔽航区的船,以下要求可作为以上要求的等效要求:.3.1 最大复原力臂对应的横倾角应不小于l5º;.3.2 最大复原力臂lm 应不小于按下式计算所得之值:0.20.022(30)m m l φ=+-式中:m φ——最大复原力臂m l 对应的横倾角,(º)。
.3.3 进水角小于最大复原力臂所对应的横倾角时,则进水角即为最大复原力臂所对应的横倾角,进水角处的复原力臂即为最大复原力臂。
.4 高速船在静水状态中,在任何允许的装载情况下受到可能产生的不可控制的乘员移动作用时,引起的横倾角应不大于12º。
第四章船舶稳性教案
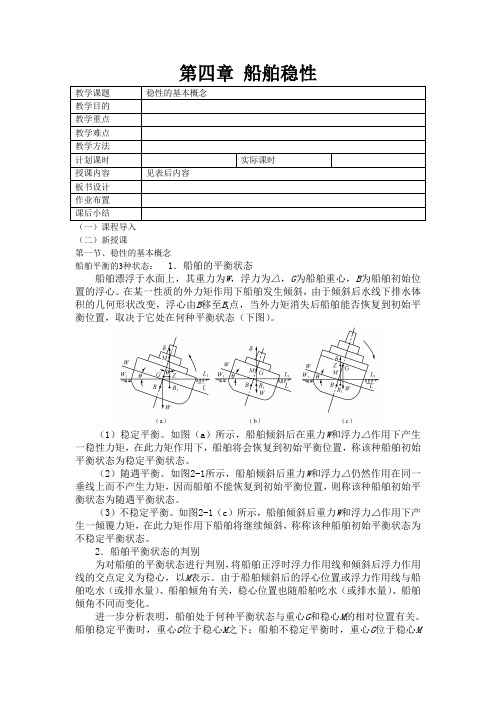
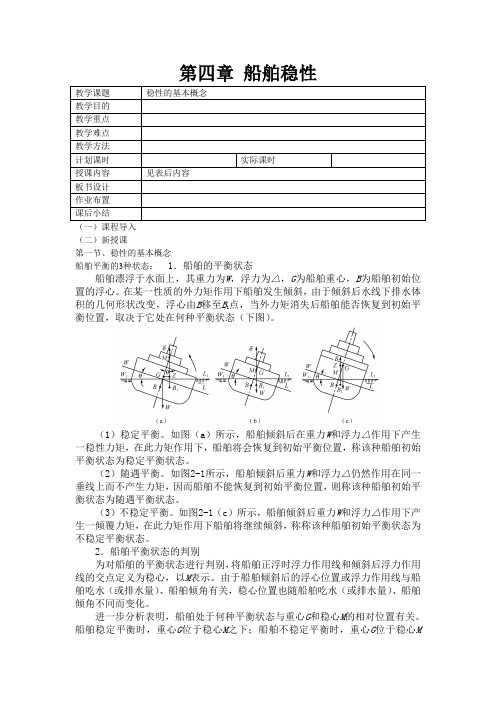
第四章船舶稳性教学课题稳性的基本概念教学目的教学重点教学难点教学方法计划课时实际课时授课内容见表后内容板书设计作业布置课后小结(一)课程导入(二)新授课第一节、稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶静力学第4章大倾角稳性

1、主要就是减小船舶的受风面积,也就 是减小上层建筑的高度和长度。某些小 型海洋船舶以及渔船等,为了保证优良 的航海性能,不得不降低船员的生活条 件和工作条件,将居住室和驾驶室等做 的矮小一些。
2、降低急牵力矩。如拖船的拖钩应尽量
放低。
•船舶静力学第4章大倾角稳性
•26
3、增大船舶的横摇阻尼,减小横摇角。 可通过设置减摇装置,如舭龙骨来实现。
船的两舷水线附近加装相当厚的护木和 浮箱等,或可在舷侧加装一个凸出体。
4、提高船舶的进水角。注意船舶水线以 上的开口位置、风雨密性和水密性。
5、减小自由液面的面积。船上较大的油
舱、水舱等通常都要设置纵向舱壁,以 减小自由液面对稳性的不利影响。
•船舶静力学第4章大倾角稳性
•25
(二)减小风压倾斜力矩
•船舶静力学第4章大倾角稳性
•21
二、重心位置对稳性的影响
问题七:重量的垂向移动对船舶初稳性有什 么影响?
•船舶静力学第4章大倾角稳性
•22
结论:重心位置对船舶稳性有 重大影响。提高重心将使初稳 性复原力臂和稳矩都相应减小 ;降低重心,则作用相反。
•船舶静力学第4章大倾角稳性
•23
三、提高船舶稳性的措施
来进行大倾角稳性的校核?简要说明原因。)
• 4、进水角与进水角曲线
•船舶静力学第4章大倾角稳性
•2
• 二、船舶稳性校核计算
• 1、我国《海船法定检验技术规则》中有关 稳性的要求
• (问题三:普通货船需要进行稳性校核的装 载情况有哪四种?)
• 2、稳性横准数
• 3、初稳性高和静稳性曲线
•船舶静力学第4章大倾角稳性
5、绘制极限重心高度曲线
取若干个不同的排水量作类似计算,便可获得
第四章 船舶稳性教案
第四章船舶稳性(一)课程导入(二)新授课第一节、稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
第四章 船舶稳性.
(1) 曲线在原点处的斜率等于初稳性高度GM
(小倾角时GZ=GMsinθ ,为正弦曲线。相比较可知,在 横倾角较小时,两条曲线重合,但随着横倾角的增大两 条曲线逐渐分离。说明大倾角横倾时GZ不能用GMsin θ 表示) 求取GM:过原点作GZ曲线的切线,然后在θ=57.3度量取该 切线的纵坐标即为GM
(ii)舱容曲线图法 (iii)舱内货物合重心法
2019/2/18
第二节 船舶稳性的计算
(i) Zi确定方法:估算法
2019/2/18
第二节 船舶稳性的计算
(ii) Zi确定方法:舱容曲线图
2019/2/18
(iii) Zi确定方法:舱内货物合重心法
以舱内所装货物的合体积中心作为该舱货物的合重心 (如果货舱已满仓,则取舱容中心作为货物的合重心)—— 合体积中心计算方法同上述方法(i) 配货的一般原则是重货在下、轻货在上,因此将货物合 体积重心作为该舱货物的合重心是一种偏安全的做法。
2019/2/18
第一节 稳性的基本概念
重量移动原理 合重心的移动方向平行于局部重心的移动方向,即: G1G2 || g1g1’,而且,PG1G2 = P1 g1g1’ 。
2019/2/18
第二节 船舶稳性的计算
一、初稳性 1.初稳性公式: MR = GZ 初稳性假定条件: (1)船舶微倾前后水线面的交线过原水线面的 漂心F; (2)浮心移动轨迹为圆弧段,圆心为定点M(稳 心),半径为BM(稳心半径)。 满足假定条件时:MR = GMsin
f d m
2019/2/18
第一节 稳性的基本概念
三、船舶的三种平衡状态(equilibrium) 1.稳定平衡:重心G在稳心M之下,MR为正值。 2.不稳定平衡:重心G在稳心M之上, MR为负值。 3.随遇平衡:重心G与稳心M重合, MR为零。
船舶的稳性

船舶稳性判定
当稳心M位于重心G之上 时,GM>0,Ms>0,称为稳定 平衡,船舶有稳性
当稳心M位于重心G之下 时,GM<0,Ms<0,称为不稳 定平衡,船舶没有稳性
当稳心M位于重心G重叠 时,GM<0,Ms<0,称为不稳 定平衡,船舶没有稳性
(θ≤100
~
150)
,
水线面由
W
L
移至
W1L1,
①重力W大小不变,因为在倾斜过程中没有重物的增减;
②重心G位置不变,因为在倾斜过程中没有重物移动
③浮力D大小不变,因为重量不变,所以排水量也不变
④只有浮心B的位置因排水体积形状变化而改变,由原来的B 向倾 斜一侧移至B 斜一侧移至B l
此时,重力W和浮力D的方向虽垂直于新的水 线面W 1 L 1,但两 个力不再作用于同一条 垂线上 ,形成一个与横倾力矩 M h方向相 反的力偶距MS=D·GZ 。称该力偶矩为船舶 复原力矩 。如图所示。式中GZ值是船舶重 力与浮力之间的垂直距 称为复原力臂,也
静稳性曲线图
船舶在某一吃水d和重 心高度Zg时,预先计 算出不同倾角下的静 稳性力臂GZ值,并画 出静稳性力臂随着横 倾角的变化曲线,即 GZ=f(θ),该曲线就 称为静态性曲线
பைடு நூலகம்
称为静稳性力臂,用符号“1”表示。
大倾角稳性
船舶在横倾力矩是作用下,倾斜角度 θ>100 ~ 150 ,,此时船舶稳性称为大倾角稳 性
浮心B和稳心M的轨迹
浮心B移动的轨迹不再是一段圆弧线,则 浮心曲线的曲率重心,即稳心M点,也 不再是一个固定点,而是随着横倾角逐 渐移动的曲线。
第四章 船舶稳性资料

MR = GMsin GM可以作为衡量船舶大小的标志。欲使 船舶具有二节 船舶稳性的计算
2.初稳性衡准指标 GM计算
(1)基本计算法 GM = KM - KG0 式中:KM —— 横稳心距基线高度(m), KM=KB+BM或者KM = f(dm); KG0 —— 船舶重心距基线高度(m);
f d m
2019/1/14
第一节 稳性的基本概念
三、船舶的三种平衡状态(equilibrium) 1.稳定平衡:重心G在稳心M之下,MR为正值。 2.不稳定平衡:重心G在稳心M之上, MR为负值。 3.随遇平衡:重心G与稳心M重合, MR为零。
2019/1/14
第一节 稳性的基本概念
(ii)舱容曲线图法 (iii)舱内货物合重心法
2019/1/14
第二节 船舶稳性的计算
(i) Zi确定方法:估算法
2019/1/14
第二节 船舶稳性的计算
(ii) Zi确定方法:舱容曲线图
2019/1/14
(iii) Zi确定方法:舱内货物合重心法
以舱内所装货物的合体积中心作为该舱货物的合重心 (如果货舱已满仓,则取舱容中心作为货物的合重心)—— 合体积中心计算方法同上述方法(i) 配货的一般原则是重货在下、轻货在上,因此将货物合 体积重心作为该舱货物的合重心是一种偏安全的做法。
2019/1/14
第一节 稳性的基本概念
二、几个基本概念 2. (横)稳心(Metacenter)M: 船舶微倾前后浮力作用线的交点。其距基线的 高度KM = f(dm)可从船舶资料中查取。
2019/1/14
第一节 稳性的基本概念
二、几个基本概念 3.(横)稳心半径(Metacentric radius)BM: IT BM 浮心B点到稳心M点之间的距离。 式中:IT —— 水线面面积横向惯性矩(m4);
第四章 船舶稳性
第一节 稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W ,浮力为△,G 为船舶重心,B 为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B 移至B 1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a )所示,船舶倾斜后在重力W 和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W 和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c )所示,船舶倾斜后重力W 和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M 表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G 和稳心M 的相对位置有关。
船舶稳定平衡时,重心G 位于稳心M 之下;船舶不稳定平衡时,重心G 位于稳心M 之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶稳性(船舶管理课件)
任务三 船舶稳性
四、影响船舶稳性的因素
5.悬挂重物对稳性的影响
悬挂对船舶稳性的影响, 相当于把质量为p的重物 从位置q1垂直上移至悬 挂点M,对稳性影响的 效果是一样的。
任务三 船舶稳性
四、影响船舶稳性的因素
6.散货的装载对稳性的影响
用散装方式进行运输的货物称为散装货物,如粮食、矿砂、 煤炭等。散装货船有时由于各种原因导致船舱不满,货物 在船舶横摇或横倾时会发生倾斜,使船舶重心发生横向移 动,从而产生与自由液面类似的影响,使船舶稳性降低。
一、稳性分类 船舶稳性分类
倾斜方向
倾斜角度
作用力性质
破损与否
横纵 稳稳 性性
大 初倾 稳角 性稳
性
静动 稳稳 性性
完破 整舱 稳稳 性性
任务三 船舶稳性
二、船舶初稳性
船舶在一横倾力矩Mh 作用下,从正浮位置
倾斜一个小角度
(<10°~15°)时 的船舶稳性,即初稳 性问题。
1.稳心M 2.稳心半径r(BM) 3.初稳性高度GM
三、船舶稳性的基本衡准
1.静态与动态横倾力矩
(1)静态横倾力矩 静态横倾力矩就是船舶处于静平衡时作用在船上的横倾力矩。 (2)动态横倾力矩 作用在船上使船舶的倾斜过程产生角加速度的横倾力矩称为 动态横倾力矩
任务三 船舶稳性 三、船舶稳性的基本衡准
2.静平衡与动平衡 (1)静平衡
船舶在静态横倾力矩作用下,稳性应满足的条件为:Mh ≤ Msm。
任务三 船舶稳性 三、船舶稳性的基本衡准
2.静平衡与动平衡 (2)动平衡
动平衡的条件为Wh= Ws,故船舶的动平衡是功的平衡。 船舶在动态横倾力矩作用下的平衡称为动平衡。
任务三 船舶稳性 三、船舶稳性的基本衡准
第一篇第4章大倾角稳性

船舶静稳性曲线的变排水量计算法
三、稳性横截曲线 通常,按式( 4 一2)、(4 -4 )和(4 一7 )分别 计算4~5 根水线下不同横倾角时的排水体积▽ φ和ls (见图4 一6 )。然后以
ls为纵坐标,▽ φ为横坐标绘制 如图4 一7 所示对应不同横倾角 φ的ls=f (φ)曲线图,该图 称为稳性横截曲线图。
2 - 13
船舶静稳性曲线的变排水量计算法
沿整个船长 L积分得微楔形对 NN 轴线的体积静矩 整个入水楔形对 NN 轴线的体积静矩 同理,出水楔形对 NN 轴线的体积静矩 则 由于水线面 WφLφ对于NN 轴线的面积惯性矩
2 - 14
船舶静稳性曲线的变排水量计算法
将式(4 一6 )、(4 一8 )和(4一11 )代人式( 4 一 5 ) ,便可求得浮力作用线至 NN 轴线的距离 lφ,再将此 lφ代人式(4 - 7 ) ,即可求得浮力ω▽ φ,至假定重心 S 的距离ls。
2 - 16
船舶静稳性曲线的变排水量计算法
2 - 17
船舶静稳性曲线的变排水量计算法
有了上述稳性横截曲线图,可以根据船舶在各种装载情况 下的排水量及其重心高度,按下式( 4 一12 )可很方便 地求出船舶的静稳性曲线图.
式中ls可以从稳性横截曲线图上查得。 按式(4一12 )计算不同横倾角沪时的静稳性臂 ls,据此 即可绘制船舶在某一排水量时(即某一装载情况下)的静 稳性曲线。
第4章 大倾角稳性
4 一1 概述 4 一2 船舶静稳性曲线的变排水量计算法 4 一3 船舶静稳性曲线的等排水量计算法 4 一4 上层建筑及自由液面对静稳性曲线的影响 4 一5 静稳性曲线的特征 4 一6 动稳性 4 一7 船舶在各种装载情况下的稳性校核计算 4 一8 极限(许用)重心高度曲线 4 一2 -91 船体几何要素等对稳性的影响
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章船舶稳性(一)课程导入(二)新授课第一节、稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶稳性的分类: 船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船体能自行恢复到初始平衡状态的能力称为船舶稳性。
船舶稳性通常可按以下方法分类:1.按船舶倾斜方向分类。
可分为横稳性和纵稳性。
横稳性指船舶绕纵向轴(x 轴)横倾时的稳性,纵稳性指船舶绕横向轴(y 轴)纵倾时的稳性。
由于纵稳性力矩远大于横稳性力矩,故实际营运中不可能因纵稳性不足而导致船舶倾覆。
2.按倾角大小分类。
可分为初稳性和大倾角稳性。
初稳性(小倾角稳性)指船舶微倾时所具有的稳性,微倾在实际营运中将倾斜角扩大至10°~15°;大倾角稳性指当倾角大于10°~15°时的稳性。
3.按作用力矩的性质分类。
可分为静稳性和动稳性。
静稳性指船舶在倾斜过程中不计及角加速度和惯性矩时的稳性;动稳性指船舶在倾斜过程中计及角加速度和惯性矩时的稳性。
4.按船舱是否进水分类。
可分成完整稳性和破舱稳性。
船体在完整状态时的稳性称为完整稳性,而船体破舱进水后所具有的稳性则称为破舱稳性。
第一节 船舶初稳性船舶初稳性的基本标准: 理论证明:船舶在微倾条件下,倾斜轴过初始水线面的面积中心即初始漂心F ;过初始漂心F 微倾后船舶排水体积不变;当排水量一定时,船舶的稳心M 点为一定点。
船舶初稳性是以上述结论为前提进行研究和表述的。
船舶在小倾角条件下,稳性力矩M s 和稳性力臂GZ 可表示为M s =ΔGM sin θGZ =GM sin θ式中:GM ───船舶重心与稳心间的垂直距离,称为初稳性高度(m ); θ───船舶横倾角(°)。
由上式可见,在排水量及倾角一定情况下,静稳性力矩大小取决于重心和稳心的相对位置,即取决于GM 大小。
当M 点在G 点之上,GM 为正值,此时船舶具有稳性力矩并与GM 值成正比;当M 点在G 点之下,GM 为负值,此时船舶具有倾覆力矩亦与GM 值成正比;当M 点和G 点重合,GM 为零,此时稳性力矩为零。
由此分析可知,GM 可以作为衡量船舶初稳性大小的基本标志。
欲使船舶具有稳性,必须使GM >0。
初稳性高度GM 的计算: 1.由装载排水量查取横稳心距基线高度KM ;2.根据装载方案按下式计算船舶KG :0i ip zKG =∆∑3.按式GM =KM -KG 计算船舶初稳性高度GM 。
自由液面对初稳性高度的影响:船上各液体舱柜在液体未充满整个舱内空间时随船舶横倾而向倾斜一侧移动,该自由流动的液体表面称为自由液面。
当船舶倾斜时,舱柜内液体随之流动,使液体的重心向倾斜一方移动,产生了一与稳性力矩方向相反的倾斜力矩,从而减少了原有的稳性力矩,也即降低了船舶初稳性高度。
自由液面对初稳性高度的修正值表达式: 由于自由液面影响而使初稳性高度减小,其减小值δGM f 可表示为xf i GM ρδ=∆式中: ρs -―液体密度(g/cm 3);i x ───液舱柜内自由液面对液面中心轴的面积惯矩(m 4)。
当存在多个自由液面时,δGM f 为xf i GM ρδ=∆∑减少自由液面影响的措施:船舶在建造和营运中,应尽量减小自由液面对稳性的影响,其具体措施包括:1.减小液舱(柜)宽度。
液体散装货船因装载大量液体货,其自由液面对稳性影响较大,为此船舶在设计时,通常都设置一道或两道纵向舱壁,将液舱宽度减小。
对于普通货船的双层底内,其左右也是水密分隔成两个液柜。
矩形液面的液舱内设置一道纵向舱壁将其宽度二等分,i x 将减至原来的1/4;设置两道纵向舱壁将其宽度三等分,i x 则减至原来的1/9。
对于等腰梯形或等腰三角形液面的液舱,若中间设置一道纵向舱壁,将其左右宽度等分,i x 则会减至原来的1/3。
增设横舱壁则不会减少自由液面对稳性的影响。
2.液舱(柜)应尽可能装满或空舱。
对于液体散装货船,各液体货舱在考虑适当的膨胀余量后应尽量装满,若舱容有剩余,则可保留若干空舱,以减少具有自由液面的舱数。
对于普通货船的油水舱,应逐舱装载和使用,这样可保持在航行中船舶未满液柜数最少。
3.保持甲板排水孔畅通。
在开航前应认真检查上甲板两舷排水孔是否畅通,并防止航行过程中堵塞,以确保甲板上浪后能迅速排出,减小因上浪而在上甲板形成自由液面的作用时间。
航行中如遇严重甲板上浪,应适当采取改向或减速措施,并注意排除排水孔排水障碍物。
4.注意纵向水密分隔是否有漏水连通现象及是否有不必要的积水。
液舱(柜)内纵向隔壁因锈蚀、不适当受力或建造缺陷,致使漏水连通而形成较大自由液面。
另外,船舶在营运中各污水舱内会积聚一定污水,应及时测量并排出。
5.在排水量较小时,更应重视液舱内自由液面对稳性的不利影响。
第三节载荷移动、重量增减、货物悬挂对稳性的影响及计算载荷移动对稳性的影响:1.船内重物水平横移船内重物水平横移,船舶重心偏离中纵剖面,横坐标改变,使之原有的平衡状态发生变化,将使船舶产生横倾角,初始水线WL与横倾后的水线W1L1之间的夹角θ即为船舶横倾角。
船在海上航行由于横摇导致重物横移时,同样使船横倾。
2.船内重物垂移船内重物垂向移动,将引起船舶重心的垂向改变,从而导致初稳性高度的变化。
由于重物移动前后船舶排水量Δ不变,故初稳心距基线高KM也未发生改变,因而重物垂移引起的初稳性高度改变量δGM在数值上等于船舶重心的垂移量GG。
船内重物上移,船舶重心上移,GM降低;船内重物下移,船舶重心下移, GM 1增大。
重量增减对稳性的影响:根据重量增减的不同数量及求取初稳性高度改变量的不同方法,重量增减可分成大量增减和少量增减两种情况。
若船舶初始排水量为△,重量增减量为∑p i,则一般认为当∑p i>10%时为重量的大量增减,当∑p i<10%时为重量的少量增减。
1.重量大量增减设船舶重量增减后排水量发生变化,从而引起初稳心距基线高KM的改变,重量增减量产生的垂向重量力矩为∑p i z i,导致则重量增减后船舶重心高度改变,根据初稳性高度计算公式,可求得重量增减后的GM。
2.重量少量增减在假设加载后初稳心M点位置不变的前提下,首先将重量在船舶原重心处增减,则重量少量增减后船舶的重心位置不变;然后将重量移至实际装载位置上,从而引起船舶重心位置改变。
显然,当重量增加时,重量装于船舶原重心之上,船舶重心提高,初稳性高度减小;反之,船舶重心降低,初稳性高度增大。
当重量减少时,与之当重量增加时的情况相反。
货物悬挂对稳性的影响:船内重量为P的悬挂货物其重心位于q1点且悬挂于m点时,当船舶横倾 角时,P在其重力作用下将由1q点移到2q点。
由此悬挂货物对船舶产生横倾力矩,从而减少了原有的稳性力矩,船舶的初稳性高度也相应减小。
显而易见,悬挂货物对初稳性的影响相当于把货物自重心1q点垂直上移到悬挂点m 处,从而使船舶重心G点上移,致使初稳性高度减小,可以把它的重心理解为在悬挂点m处,m点称为悬挂重物的虚重心。
第二节船舶大倾角静稳性大倾角静稳性基本概念: 1.船舶在海上航行中,由于风浪的作用往往使船舶横倾角超过10°~15°,这时船舶的稳性就称为大倾角静稳性。
大倾角稳性和初稳性的区别为:首先,两者对应的船舶横倾角不同。
船舶横倾角θ小于10°~15°时对应的稳性为初稳性,而横倾角大于10°~15°时对应的稳性即为大倾角稳性。
其次,船舶在大倾角横倾时相邻两浮力作用线交点不再为定点M。
再次,船舶大倾角横倾时倾斜轴不再过初始水线面漂心。
最后,船舶大倾角稳性不能GM作为基本标志来衡量。
2.大倾角静稳性的基本标志船舶在外力矩作用下发生大倾角横倾,当外力矩消失后,船舶重力和浮力仍然形成力偶,其力矩即为静稳性力矩或称复原力矩,表示式为:M=Δ·GZs船舶在排水量一定的条件下,稳性力矩M s大小取决于船舶重心G到倾斜后浮力作用线的垂直距离,即取决于静稳性力臂GZ,并与GZ成正比,因此,静稳性力臂GZ可以作为衡量大倾角静稳性的基本标志。
自由液面对大倾角稳性的影响:在计算各倾角时的静稳性力臂或静稳性力矩值时,如初稳性计算一样,也需进行自由液面修正,即液舱内自由液面使静稳性力臂及静稳性力矩减小。
液舱内的液体随船舶倾角的增大而引起自由液面较大变化,从而引起自由液面力矩的较大变化。
静稳性曲线上特征参数的含义:静稳性曲线的主要特征体现在:1.静稳性曲线在原点处的斜率。
静稳性曲线在原点处的斜率等于初稳性高度G0M。
2. 静稳性曲线上的反曲点。
当横倾角增大至甲板浸水角时,静稳性曲线上升段出现一反曲点,在该点以前,曲线上升较快;在该点之后,曲线上升趋势减缓,反曲点处曲线斜率最大,这是因为船舶横倾至甲板浸水角前后浮心位置改变最大所决定的。
3.静稳性曲线上的极值点。
当横倾角增大至某一角度,静稳性曲线取得极值点,它标明了曲线最高点的位置,反映出船舶在横倾中所具有的最大静稳性力矩(臂),以及取得静稳性力矩(臂)最大值时船舶的倾斜状态。