工业控制网络复习题 --电子科技大学
一种改进的DV-Hop无线传感器网络定位算法

中 。数 据 包 的格 式 为 :I,o Sz i, o Sz i 该信 标节 点 到 { H p i lH p i 是 d e e 所 有其 它 信标 节点 的 每跳 平 均 距 离 。 每 个 接 收 到 此 数 据 的 节 点 将 此 信 息 添 加 到 表 中 , 后 继 续 向其 邻 居 广 播 , 复 I 的 数 据 然 重 D 包 就 丢 弃 。 过此 阶段 的广 播 后 , 有节 点 都 已知 所 有 信 标 节 点 经 所
Absr t tac
Ba ed n t e s o h DV-Hop w i ls en orn wor o at n l r h r e s s s et k lc i ago i m u ig r n arm e u e e t e o t sn ti gul as r m n met d al lt po i a ho c cuae s— t , t a a ge co s i wi on h lr n um p i o er is e s ape u es me h d o c lul ig t on f en gy s u sThi p r s a to f ac at M I n N-MAX ode o t , r du n lca i by e c・ on ig n cac a i pen ng,e ci e er on umpt , s ol gig he s vva o r es s s t k c cl T x— lult on s di r du ng n gy c s i t pr on n t uri l fwi on hu el s en ornewors y e.he e per e t s o t a t e m pr e al i i n s h w h t h i ov d gorhm c n ub t t l rdu c m pu i c s sbu alo sl t i prv po io ng m t a s san i y e ce o al t ng o t , t s i l m o ed gh y st ni i
电子科技大学22春“电力系统自动化技术”《供配电系统监控与自动化》期末考试高频考点版(带答案)试卷号

电子科技大学22春“电力系统自动化技术”《供配电系统监控与自动化》期末考试高频考点版(带答案)一.综合考核(共50题)1.在馈线系统中,()是一种自身具备控制及保护功能的开关设备,它能按预定的开断和重合顺序自动进行开断和重合操作,并在其后自动复位或闭锁。
A.重合器B.分段器C.隔离器参考答案:A2.微机远动装置的基本功能有()A.四遥B.事件顺序记录C.系统对时和电能采集D.自恢复自检测以及和SCADA系统通信参考答案:ABCD3.分段器的关键部件是()。
A.柱上真空开关B.故障测位继电器C.开关电源D.电流继电器参考答案:B4.目前,配电网的电压等级一般是()。
A.低于220KVB.高于220KVC.220KV-33KV之间D.低于330KV5.对于一个具有多个馈线偶的配电网络,一般通过以联络开关为核心的网络重构方法实现网络最优化。
在进行以负荷均衡化为目标的网络重构后,可以保证()。
A.配电网的负荷平衡率大于连通系的优化启动条件B.配电网的负荷平衡率等于连通系的优化启动条件C.配电网的负荷平衡率小于连通系的优化启动条件参考答案:C6.区域工作站实际上是一个集中和转发装置,采用()构成。
A.工业控制机B.工业控制PC机和多路串行口C.多路串行口D.问答规约参考答案:B7.配电线载波通信是将载波信号以()为传输介质进行通信的通信手段。
A.配电线B.光缆C.光导纤维D.其它参考答案:A8.配电自动化的通信系统要求在()条件下能可靠工作。
A.很强的电磁干扰环境下B.雷电C.电力故障D.在电力故障以及强烈的电磁干扰环境参考答案:A负荷管理子过程的监视业务包括()A.状态信息采集B.无功功率监视C.负荷监视D.开关状态监测参考答案:CD10.配电网的构成包括()。
A.控制器B.配电变电所C.配电线路D.配电自动化系统参考答案:BC11.光端机按照传输制式划分,可分为()光端机。
A.SDH和PDHB.SDH和PCMC.PDH和PCMD.光Modem和光纤收发器参考答案:A12.遥控的功能主要用于()。
射频模拟电路答案
射频模拟电路答案【篇一:02如何快速入门电子技术】>作者:刘昆山众所周知,学习讲究方法,方法对了,事半功倍,越学越有味。
方法不对,耗时耗力,困难重重,且可能随时让你产生放弃的念头。
万事开头难,同样,学电子技术的关键在于入门,故电子初学者首先要解决的就是如何快速入门的问题。
针对此,本人在这里做一个简单的阐述。
学习电子技术必须注重“理论+实践”的方法。
如果只学理论知识而不动手操作,则收效甚微;如果只进行实践操作而不学习理论知识,效果也不明显。
因此,学好电子技术必须做到理论、实践同时学,即既进行理论知识的学习又进行实践动手能力的充分锻炼。
一、如何快速学理论知识很多电子初学者最头痛的一件事,就是学理论知识,有些朋友索性就避开理论不学。
可要知道,不学理论而只动手操作,就像“无源之水”、“无本之木”,是很难真正掌握电子技术。
要学好电子技术,必须学好电子基础理论知识。
看书是最基本的学习方法,但是看书往往费时费脑,且不容易入门。
请身边的朋友帮忙指点下,朋友不一定会倾其全心,即使想倾其全心,也不一定能倾其全力,因为他不一定有时间。
下面推荐四部视频教程,这里面涵盖了电子专业必修的电子基础理论知识:1、电路分析基础(电子科大)钟洪声主讲的视频教程;2、模拟电子电路设计(电子科大)曲建主讲的视频教程;3、数字电子基础(电子科大)金燕华主讲的视频教程;4、射频模拟电路全集(电子科大)杨玉梅主讲的视频教程。
有了这四部视频教程,任何人都可以自学入门电子技术,打下坚实的理论基础,为以后成为电子工程师提供基础理论知识和实践操作能力。
二、如何快速掌握实践动手能力我们都知道,光有理论不会实践、不会动手,学了等于白学。
那如何提高实践动手能力呢?很多电子爱好者为此非常困惑,下面我来为大家解决这个问题。
我们主张电子技术初学者最好用万能板焊接电子制作产品,因为这种电子制作的方法,不仅能练习焊接技术,同时还能提高识别电路图和分析原理图的能力,为日后维修、设计电子产品打下坚实的基础。
电子科技大学14秋《机械电子工程设计》在线作业2答案

14秋《机械电子工程设计》在线作业2
单选题
一、单选题(共20 道试题,共100 分。
)
1. 以下哪个不是导轨所起的作用(
A. 传动
B. 支承
C. 导向
-----------------选择:A
2. 伺服机械传动系统的作用时()
A. 控制精度
B. 传递转速和扭矩
C. 传递能量和动力
-----------------选择:B
3. 工业机器人的组成部件中,实现操作功能的是()
A. 末端执行器
B. 腕部
C. 机身
-----------------选择:A
4. 光盘时借助()来实现数据记录和再现的存储器
A. 磁头
B. 检测
C. 激光
-----------------选择:C
5. 超声波电子的定子是由弹性体和()构成的
A. 电枢
B. 绕磁
C. 压电元件
-----------------选择:C
6. 以下哪一种不是机器人运动的基本形式()
A. 直角坐标式
B. 关系式
C. 直线移动式
-----------------选择:C
7. 以下哪一种不是伺服系统设计的基本要求()
A. 稳定性
B. 精度
C. 稳态性
-----------------选择:C
8. 伺服系统中,运动体没有达到目标位置的现象称为()
A. 误差。
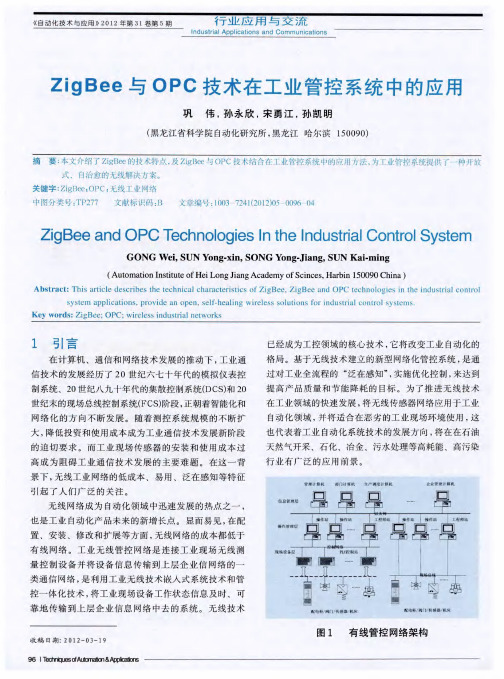
ZigBee与OPC技术在工业管控系统中的应用
88 6 MHZ 欧洲 ) 91 M HZ 美 国) 均为免执 照频段 。 ( 和 5 ( ,
Z g e的 以上 技术特 点决定 了它将 是无 线传 感器 网络 i Be
的最好选择 【。 2 1
() 采用统一 的协议标 准实现 2
5 信 息 集 成 技 术 的 选择
工业 现场无 线技术方 案的选择 : 0 . . 、红外 、 82 1 4 5 Ho RF me 、蓝牙、8 2 1b 0 . 、Hie L l p r AN1 。 等
()低成 本 , iB e 4 Zg e 协议简单 ( 不到蓝牙 的 1 0 , /1)从
而降 低 了对 通信控 制器 的要 求 , 8位 单片机就 能满 足要 求, 目前各 家半导体制造商所推 出的 Zg e 芯片的价格 iB e 都 在 8美元 以下 , 外围 电路简 单 , 而且 Z g e 协 议是免 iB e
确 定其安 全属性 ;
()免 执照频段 , 9 使用 的频段分 别为 2 4 .GHz全球) ( 、
在 应用程序 之 间传 输数据 , 完成 应用程序 之 间的数据 交 换。D E集成方 式虽然具有 较强的实时 陛, D 且借助 wi- n d ws o 平台较容易 实现 , 但是整个 协议转换 较复杂 , 软件 开销 比较大 , 以只适合 配置 简单 的小 型系统 。 所
图 3 Zg e iB e无线网络
要考 虑 目前流 行 的几 种无 线 技术 的 传输 速度 、 适 用场 合 。将 它们 引入到 工业控 制 网络 时 , 要结 合工业 控 制 网络 , 低成 本 、可靠性 与实 时性 有保 证的重要 特征 来 仔 细 考 虑 。从 数 据 传 输 率 的 角 度 不 难 看 出 , Hi e LAN2 0 1 b较适合 于 家庭娱 乐型 网络 , pr 、8 2. 1 Ho RF、蓝 牙则适 合于数 据文件 和语音 的传 输。 而 me 则 I E 8 2 1 . E E 0 . 4低数 据传输率 的监测和控 制 网络 的 5 首选 技 术 。 由于现 阶段 工 业监 控场 合 主要 的应 用 是机
电子科技大学《机电系统计算机控制技术》20春期末考试

B.错误 正确答案:A
5.当光敏电阻受到光照时,若把光敏电阻串一电路回路中,回路中的电流变大。 A.正确 B.错误 正确答案:A
6.AD574芯片片内有输出三态缓存器,因此可以与8位或16位的微处理器直接接口。() A.正确 B.错误 正确答案:A
二、多选题 1.计算机控制系统的组成有 等。 A.PLC B.检测元件 C.驱动元件 D.工控机 正确答案:BCD
2.控制系统的软件开发中常用设计方法有 等。 A.模块化设计 B.中断控制和管理 C.人机联系的管理 D.软件狗技术 正确答案:ABC
3.机械设备的机械参数有 。 A.位移 B.速度 C.加速度 D.阻尼 正确答案:AB
18.在计算机交流电机控制系统中,需要解决的问题是() A.将交流变成只留后并放大 B.将直流变成交流后并放大 C.设单向开关,使直流电通过并放大 D.设双向开关,使交流电通过并放大 正确答案:D
19.8051单片机有 级中断。 A.2 B.4 C.5 D.8 正确答案:A
20.下列不属于干扰的作用方式的是() A.串模干扰 B.共模干扰 C.长线传输干扰 D.短线传输干扰 正确答案:D
4.几种工业标准总线有STD、 等。 A.PCIE B.CPCI C.ISA D.PCI 正确答案:D
5.控制系统常常按其开环传送函数中所含 环节个数来分类,分为“0”型,“I”型系统等。 A.微分 B.惯性 C.积分 D.振荡 正确答案:C
6.PLC的工作原理是 。 A.查询方式 B.应答方式 C.巡回扫描 D.顺序扫描 正确答案:C
电子科技大学《机电系统计算机控制技术》20春期末考试
电子科技大学《数据库原理与应用》20春期末考试参考答案

电子科技大学《数据库原理与应用》20春期末考试试卷总分:100 得分:100一、单选题(共30 道试题,共75 分)1.数据库管理系统是数据库系统的核心,它负责有效地组织、存储和管理数据,它位于用户和操作系统之间,属于( )A.系统软件B.工具软件C.应用软件D.数据软件答案:A2.不属于实体完整性的是()A.check约束B.唯一性约束C.主键约束D.非空约束答案:A3.把实体—联系模型转换为关系模型时,实体之间多对多联系在关系模型中是通过()A.建立新的属性来实现B.建立新的关键字来实现C.建立新的关系来实现D.建立新的实体来实现答案:C4.比较“逻辑操作符”、“关系操作符”、“算术操作符”的优先级,从高到低排列正确的是(?????)A.算术、关系、逻辑B.算术、逻辑、关系C.关系、逻辑、算术D.关系、算术、逻辑答案:A5.下列关于E-R模型向关系模型转化的叙述中,不正确的是()。
A.一个实体类型转化为一个关系模式。
B.一个m:n的联系转化为一个关系模式。
C.一个1:1的联系可以转化为独立的关系模式,也可以与联系的任意一端的实体所对应的关系模式合并。
D.一个1:n的联系可以转化为独立的关系模式,也可以与联系的任意一端的实体所对应的关系模式合并。
答案:D6.假定学生关系是S(SNo,SName,Sex,Age),课程关系是C(CNo,CName,Teacher),学生选课关系是SC(SNo,CNo,Grade)。
要查找选修“数据库”课程的“男”学生姓名,将涉及的关系是()。
B.SC,CC.S,SCD.S,SC,C答案:D7.语句SELET COUNT(*) FROM human返回()行。
A.1B.2C.3D.4答案:A8.关系模型中,表示实体间N:M联系是通过增加一个()。
A.关系实现B.属性实现C.关系或一个属性实现D.关系和一个属性实现答案:A9.自然连接是构成新关系的有效方法。
一般情况下,当对关系R和S使用自然连接时,要求R和S含有一个或多个共有的( )。
机电一体化原理与应用-模拟题1-3
西安电子科技大学网络教育2010学年上学期模拟试题1课程名称:__机电一体化原理及应用考试形式:闭卷学习中心:_________ 考试时间: 90分钟姓名:_____________ 学号:一填空题(每空1分,合计30分)1. 滚珠丝杆中滚珠的循环方式:__________,________________。
2. 机电一体化系统,设计指标和评价标准应包括 __________, __________, __________ ,__________。
3. 顺序控制系统是按照预先规定的次序完成一系列操作的系统,顺序控制器通常用___________。
4. 某光栅的条纹密度是50条/mm,光栅条纹间的夹角θ=0.001孤度,则莫尔条纹的宽度是_______________________。
5. 连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制每一个轴的__________、___________,使它们同步协调到达目标点。
6. 某4极交流感应电机,电源频率为50Hz,转速为1470r/min,则转差率为_____________。
7. 齿轮传动的总等效惯量与传动级数的关系是:___________________。
8. 复合控制器必定具有__________________________________。
9. 位置传感器按其原理主要分__________、___________、__________、__________等几种。
10. 钻孔、点焊通常选用_____________________类型的数控机床,平面片类零件加工选用______________________类型的数控机床,曲面加工通常选用_______________________类型的数控机床。
11. 一般来说,伺服系统的基本组成为、、和等四大部分组成。
12.现在常用的总线工控制机有 _______ 、_______ 、_______ 等。
十四套名校数电考研真题、答案与详解
十四套名校数电考研真题、答案与详解网学天地()出品版权所有!目 录1华中科技大学2008年《电子技术基础》考研真题与答案 (1)2电子科技大学2010年《数字电路》考研真题与答案 (6)3浙江大学2011年《信号系统与数字电路》考研真题与答案 (14)4吉林大学2010年《电子技术》考研真题与答案 (20)5南开大学2011年《电子综合基础》考研真题与答案 (23)6华南理工大学2011年《电子技术基础》考研试题 (27)7哈尔滨工业大学2010年《电子技术基础》考研真题与答案 (33)8哈尔滨工业大学2010年《电路与数字电子技术》考研真题与答案 (39)9哈尔滨工业大学2010年《信号与系统、数字电路》考研真题与答案 (40)10复旦大学2009年《电子线路与集成电路设计》考研真题与答案 (48)11东南大学2008年《信号与系统、数字电路》考研真题与答案 (52)12深圳大学2011年《数字电路与专业综合》考研真题与答案 (60)13重庆大学2010年《电子技术一》考研真题与答案 (67)14北京邮电大学2009年《电子电路》考研真题与答案 (71)网学天地( )出品 版权所有! 11 华中科技大学2008年《电子技术基础》考研真题与答案数字电子技术部分一、填空题(每空1分,共20分)4.数字电路中的三极管一般工作于________区和________区。
答案:截止 饱和5.(63)O 的二进制补码是________,格雷码是________。
答案:(101100)B (101010)B6.四个逻辑变量的最小项最多有________个,任意两个最小项之积为________。
答案:16 07.触发器是对脉冲________敏感的存储单元电路,锁存器是对脉冲________敏感的存储电源电路。
答案:边沿 电平8.对于一个含有逻辑变量A 的逻辑表达式L ,当其他变量用0或1代入后,表达式可化简为:L =________或________时,会产生竞争冒险。
电子科技大学14秋《机械电子工程设计》在线作业3答案

14秋《机械电子工程设计》在线作业3
单选题
一、单选题(共20 道试题,共100 分。
)
1. 伺服系统中精度最高的控制方式是()
A. 闭环控制
B. 半闭环控制
C. 开环控制
-----------------选择:A
2. 数字检测系统中,起着提高分辨率的电路是()
A. 放大电路
B. 细分电路
C. 整形电路
-----------------选择:B
3. 下面哪个环节属于在总体设计中互补性设计()
A. 性能分析
B. 功能分配
C. 性能分配
-----------------选择:C
4. 若三相步进电动机的转子是4齿,那么三相六拍的通电方式下的步距角是()
A. 90度
B. 30度
C. 15度
-----------------选择:C
5. 当阳极加正向电压时,单向晶闸管的导通条件是()
A. G极加正向电压
B. G极加反向电压
C. 施加足够大的电流驱动
-----------------选择:A
6. 模拟检测电路中将电阻、电容等电参量变换转换为电压、电流等电量变化的电路是()
A. 基本转换电路
B. 调制解调电路
C. 滤波电路
-----------------选择:A
7. 操作者与控制微机之间进行信息交换的接口是()
A. 人机接口
B. 机电接口
C. 输出接口
-----------------选择:A
8. PID控制中I指的是哪种控制规律()
A. 比例。
2012-2013-2 OS试卷A(带答案)
第2页
共3页
座位号:
P3 0020 P4 0642 b)P0->P2/P3->*,所以安全。 c)安全,可以分配。
2.(8 分)某磁盘大小为 1MB,磁盘上的磁盘块大小为 1KB,从 0 开始编号。某文件顺序存储在 4
个磁盘块上:20,500,10 和 900,且该文件的目录项位于 51 号块上,已知最后一次磁盘访问的是
23.下面关于 i 节点描述错误的是(A)。
A.i 节点和文件的目录项是一一对应的。
B.i 节点能描述文件占用的块数。
C.i 节点描述了文件大小和指向数据块的指针。
D.通过 i 节点实现文件的逻辑结构和物理结构的转换。 24.位示图法用于(D)。
A.文件目录的查找 B.主存空间的管理 C.文件的共享与保护
Maximum Need ABCD 0012 1750 2356 0652 0656
Available
ABCD 1520
a) What is the content of the matric "Need"?
b) Is the system in safe state? Prove it!
c) If a request from process P1 arrives for (0,4,2,0), can the request be immediately granted?
A.前者分时使用 CPU,后者独占 CPU。
B.前者为动态的,后者为静态的。
C.前者在一个文件中,后者在多个文件中。 D.前者存储在内存,后者存储在外存。
12.进程从执行态转变为阻塞态可能是由于(C)。
多串口-以太网转换器设计

串口通信是目前自动控制系统中底层数据共享的主流方式 之一。 然而, 串口总线通信抗干扰能力较差, 传输速度低。 特别是
] 1 其通讯距离有限, 已限制了自动控制系统的网络化发展 [ 。 T C P /
I P是一种基于复杂环境设计的高效、可靠通信协议族,具有宽
带、 高速、 远距、 易组网等一系列串口通行所无法比拟的优势。 因 此, 将现有串口设备进行网络化, 甚至构建成更加分散的网络控
摘 要
网络化是当前自动控制系统发展的重要趋势, 针对现有基于串口通信的系统无法与远程网络实现互联的问题, 提出了 一种多串口 - 以太网转换器设计方案。以 W5 选用 S 采用直接总 1 0 0为以太网控制器, T M3 2 F 1 0 1 R 8单片机作为主控制器, 线通讯方式实现 W5 可实现多个 R 1 0 0与单片机之间的高速通信, S 4 8 5串口设备的以太网接入。阐述了以太网转换器电路 有效地保证了转换器的实时 设计原理、 数据收发实现流程与网络连接技术。采用 C R C冗余校验和数据流流向 编 码 技 术 , 性, 提高了数据转发的准确性。研究结果表明, 该方案能延伸数据通信距离, 节省现有系统更新换代的成本。 关键词 : 转换器, , 直接总线, S T M3 2 W5 1 0 0
《 工业控制计算机》 2 0 1 4年第 2 7卷第 1 1期
8 7
多串口- 以太网转换器设计
D e s i g no f S e r i a l s - E t h e r n e t S w i t c h
姜晓荣 姜周曙
杭州电子科技大学能源利用系统与自动化研究所, 浙江 杭州 3 ) 黄国辉 ( 1 0 0 1 8
] 2 制系统[ , 采 用 串 口- 以太网转换器不失为一种经济、 快速的解 ] 3 决方案 [ 。
电子科技大学22春“电气工程及其自动化”《电力系统自动装置》作业考核题库高频考点版(参考答案)试题号
电子科技大学22春“电气工程及其自动化”《电力系统自动装置》作业考核题库高频考点版(参考答案)一.综合考核(共50题)1.在励磁调节器中,移相触发单元的作用是将()的控制信号转换成触发脉冲的。
A、调差单元B、测量比较单元C、综合放大单元D、灭磁回路参考答案:C2.造成电力系统频率上升的原因是()。
A.无功功率过剩B.无功功率不足C.有功功率过剩D.有功功率不足参考答案:C3.低压配电网的电压一般为()。
A.35~110 kVB.6~20kVC.380~220VD.220~110V参考答案:C4.励磁系统提高电网暂态稳定性的条件之一是()。
A、功率恒定B、电压恒定C、惯性时间长D、惯性时间短5.虚有差调频法具有的特点是()。
A.调节过程中有差,调节结束时有差B.调节过程中有差,调节结束时无差C.调节过程中无差,调节结束时有差D.调节过程中无差,调节结束时无差参考答案:B6.负荷增大时,并网运行的发电机台数将()。
A.不变B.减小C.增多D.不确定参考答案:C7.同步发电机自动并列装置是一种()。
A、自动调节装置B、自动操作装置C、安全自动装置D、继电保护装置参考答案:B8.待并发电机组作适当调整以符合并列条件后通过()合闸作并列运行。
A、断路器B、继电器C、隔离开关D、熔断器参考答案:A同步发电机励磁系统的控制部分、用以实现正常及事故情况下励磁电流的自动调节的装置称为()。
A.复式励磁装置B.自动励磁调节器C.发电机稳定控制器D.发电机自动灭磁装置参考答案:B10.同步发电机灭磁时是指()。
A.把发电机转子绕组中的磁场储能迅速减弱到最小程度B.把发电机定子绕组中的磁场储能迅速减弱到最小程度C.把励磁机转子绕组中的磁场储能迅速减弱到最小程度D.把励磁机定子绕组中的磁场储能迅速减弱到最小程度参考答案:A11.系统正常运行状态下,AAT装置中得电动作的继电器是()A、时间继电器B、信号继电器C、出口继电器D、闭锁继电器参考答案:D12.自动低频减载装置的基本级动作延时一般为()。
一种基于多传感器的无人机避障算法

《工业控制计算机》2021年第34卷第5期89一种基于多传感器的无人机避障算法A Multi-sensor-based UAV Obstacle Avo i dance Algor i t hm赵志章贺勇刘甜(长沙理工大学电气与信息工程学院,湖南长沙410000)摘要:针对无人机避障问题,提出一种基于多传感器的四旋翼无人机避障方法。
外部传感器主要包括了GPS模块、激光雷达与单目摄像头。
对二维VFH(Vector Fi ald H i stogram)方法进行了改进,通过计算了无人机自身体积,直接将障碍物直方图二值化,加入获得的障碍物高度信息,提出了一种移动成本代价函数,使无人机进行最优的条件下垂直和水平各转向角的选择。
仿真实验结果表明,该方法能够实现无人机在未知环境中从起点到目标点的避障。
关键词:无人机;多传感器;VFH;代价函数Abstract:A mult i-sensor four-rotor UAV 2.5-d i m ans ional obstacle avo idanca methods proposed for UAV obstacle avo i d ance.External sensors ma i n ly include GPS modules,l i d ar and monocular cameras.By calculat i n g the volume of UAV itself,b i n ar i z i n g the obstacle h i s togram d i r ectly and add i n g the obta i n ed obstacle he i g htnformat i o n,a mov i n g cost cost funct ionsproposed in th i s paper.The UAV can select the vert i c al and hor i z ontal steer i n g angles under the opt i m al cond i t i o ns.The s i m ulat i o n results show that th i s method can avo i d obstacles from start ing po i n t to target po i n t in unknown env i r onment.Keywords:UAV,mult i-sensor,VFH,cost funct i o n近年来,多旋翼无人机作为具有垂直起降能力和较高机动性的空中移动机器人,被广泛应用于测绘、巡线[1]、植保0、物流运输回等多种场景。
霓虹彩灯的PLC控制

沈阳航空航天大学课程设计(论文)题目霓虹彩灯的PLC控制(二)班级学号学生姓名指导教师目录0. 前言 (1)1. 总体方案设计 (2)2. 硬件电路的设计 (2)2.1 I/O地址分配表 (2)2.2 I/O连接图 (3)3. 软件设计 (3)3.1 编程软件 (4)3.2 程序说明及部分梯形图 (4)3.3 程序流程图 (5)3.4 组态程序设计 (7)4.联合调试 (7)5.课设小结及进一步设想 (8)参考文献 (8)附录I 梯形图 (9)附录II 语句表 (14)霓虹彩灯的PLC控制(二)沈阳航空航天大学自动化学院摘要:本文主要设计了一个基于S7-200的霓虹彩灯控制系统,采用PLC实验装置中的模拟实验挂箱(一)完成一套灯光控制装置设计。
本文介绍了霓虹灯PLC控制与监控组态设计过程。
本仿真系统是由上位机和下位机两部分组成,上位机采用组态王软件,主要用来完成仿真界面的制作工作,而下位机则主要用STEP 7-MicroWIN来完成PLC程序的编写。
通过串行连接、调试,成功在上位机中模拟出霓虹灯的运行情况。
关键字:S7-200;霓虹灯;组态王;PLC ;双机串行通信0.前言在工业生产过程中,大量的开关量顺序控制,它按照逻辑条件进行顺序动作,并按照逻辑关系进行连锁保护动作的控制,及大量离散量的数据采集。
传统上,这些功能是通过气动或电气控制系统来实现的。
1968年美国GM(通用汽车)公司提出取代继电气控制装置的要求,第二年,美国数字公司研制出了基于集成电路和电子技术的控制装置,首次采用程序化的手段应用于电气控制,这就是第一代可编程序控制器,称Programmable Controller(PC)。
个人计算机(简称PC)发展起来后,为了方便,也为了反映可编程控制器的功能特点,可编程序控制器定名为Programmable Logic Controller(PLC),现在,仍常常将PLC 简称PC。
PLC的定义有许多种。
电子科技大学2016-高级计算机体系结构复习(桂盛霖)

– SPEC2000 • SPECviewperf – is used for benchmarking systems supporting the OpenGL graphics library • SPECapc – consists of applications that make extensive use of graphics.
22
1.4 性能 比较2台计算机性能时应考虑三个因素: 指令数:使用仿真器软件工具可测量出。 CPI:与计算机各种设计细节密切相关,
以及应用程序中不同类型指令所占的比例。
时钟频率 (硬件手册通常直接给出)
电子科技大学计算机科学与工程学院
23
1.4 性能
记住:
1. 只用一种因素(如指令数)去评价性能是危险的。当
32
1.6 性能测试程序
计算机性能通常用峰值性能(Peak performance)
和持续性能(Sustained performance)来评价。 峰值性能是指在理想情况下计算机系统可获得的最 高理论性能,它不能反映出系统的实际性能。 实际性能又称持续性能,其值只有峰值性能的
5%~35%,这是因为实际程序运行时会受到硬件结
1.也是存储程序系统
2.有独立的数据存储区和数据 总线
3.有独立的指令存储区和指令 总线 典型处理器:DSP
电子科技大学计算机科学与工程学院
7
1.2 计算机的分类及特性
桌面计算机(Desktop/Laptop Computer) 通用性应用
构成
CPU、内存、硬盘、鼠标、键盘、显 示器等
主要指标
周期
• 机器B 没有这种指令 ---它计算平方根用软件方式即用加、
工业控制网络复习题 --电子科技大学
《工业控制网络》复习题一、概念题1、现场总线:安装在制造或过程区域的现场装置与控制室内的自动控制装置之间的数字式、串行、多点通信的数据总线称为现场总线。
2、模拟数据编码:分别用模拟信号的不同幅度、不同频率、不同相位来表达数据的0、1状态的,称为模拟数据编码。
3、数字数据编码:用高低电平的矩形脉冲信号来表达数据的0、1状态的,称为数字数据编码。
4、单极性码:信号电平是单极性的数字数据编码。
5、双极性编码:信号电平为正、负两种极性的数字数据编码。
6、归零码(RZ):在每一位二进制信息传输之后均返回零电平的数字数据编码。
7、非归零码(NRZ):在整个码元时间内维持有效电平的数字数据编码。
8、差分码:用电平的变化与否来代表逻辑“1”和“0”的数字数据编码。
9、基带传输:就是在数字通信的信道上按数据波的原样进行传输,不包含有任何调制。
10、载波传输:采用数字信号对载波进行调制后实行传输。
11、单工通信:指传送的信息始终是一个方向,而不进行与此相反方向的传送。
12、半双工通信:指信息流可在两个方向上传输,但同一时刻只限于一个方向传输。
13、全双工通信:指能同时作双向通信。
14、广播式网络:仅有一条通信信道,由网络上的所有机器共享。
短的消息,即按某种语法组织的分组或包,可以被任何机器发送并被其它所有的机器接收。
分组的地址字段指明此分组应被哪台机器接收。
一旦收到分组,各机器将检查它的地址字段。
如果是发送给它的,则处理该分组,否则将它丢弃。
15、点到点网络:由一对机器之间的多条连接构成。
为了能从源到达目的地,这种网络上的分组可能必须通过一台或多台中间机器。
16、类:一组表示同种系统组件的对象。
一个类是一个对象的一种概括。
一个类中所有的对象在形式和行为上是相同的,但是它们可以包含不同的属性值。
17、实例:一个对象的一个明确的真实(物理)事件。
18、属性:一个对象的一个外部可视特性或特点的一种描述。
19、广播风暴:当广播数据充斥网络无法处理,并占用大量网络带宽,导致正常业务不能运行,甚至彻底瘫痪,这就发生了“广播风暴”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《工业控制网络》复习题一、概念题1、现场总线:安装在制造或过程区域的现场装置与控制室内的自动控制装置之间的数字式、串行、多点通信的数据总线称为现场总线。
2、模拟数据编码:分别用模拟信号的不同幅度、不同频率、不同相位来表达数据的0、1状态的,称为模拟数据编码。
3、数字数据编码:用高低电平的矩形脉冲信号来表达数据的0、1状态的,称为数字数据编码。
4、单极性码:信号电平是单极性的数字数据编码。
5、双极性编码:信号电平为正、负两种极性的数字数据编码。
6、归零码(RZ):在每一位二进制信息传输之后均返回零电平的数字数据编码。
7、非归零码(NRZ):在整个码元时间内维持有效电平的数字数据编码。
8、差分码:用电平的变化与否来代表逻辑“1”和“0”的数字数据编码。
9、基带传输:就是在数字通信的信道上按数据波的原样进行传输,不包含有任何调制。
10、载波传输:采用数字信号对载波进行调制后实行传输。
11、单工通信:指传送的信息始终是一个方向,而不进行与此相反方向的传送。
12、半双工通信:指信息流可在两个方向上传输,但同一时刻只限于一个方向传输。
13、全双工通信:指能同时作双向通信。
14、广播式网络:仅有一条通信信道,由网络上的所有机器共享。
短的消息,即按某种语法组织的分组或包,可以被任何机器发送并被其它所有的机器接收。
分组的地址字段指明此分组应被哪台机器接收。
一旦收到分组,各机器将检查它的地址字段。
如果是发送给它的,则处理该分组,否则将它丢弃。
15、点到点网络:由一对机器之间的多条连接构成。
为了能从源到达目的地,这种网络上的分组可能必须通过一台或多台中间机器。
16、类:一组表示同种系统组件的对象。
一个类是一个对象的一种概括。
一个类中所有的对象在形式和行为上是相同的,但是它们可以包含不同的属性值。
17、实例:一个对象的一个明确的真实(物理)事件。
18、属性:一个对象的一个外部可视特性或特点的一种描述。
19、广播风暴:当广播数据充斥网络无法处理,并占用大量网络带宽,导致正常业务不能运行,甚至彻底瘫痪,这就发生了“广播风暴”。
一个数据帧或包被传输到本地网段(由广播域定义)上的每个节点就是广播;由于网络拓扑的设计和连接问题,或其他原因导致广播在网段内大量复制,传播数据帧,导致网络性能下降,甚至网络瘫痪,这就是广播风暴。
20、封装:分层协议使用的一种技术,即当前层将头部信息添加到来自上一层的协议数据单元(PDU)。
二、填空题1、现场总线控制系统硬件包括:通信线、连接在通信线上的设备;软件包括:组态工具软件、组态通信软件、控制器编程软件、用户程序软件、设备接口通信软件、设备功能软件、监控组态软件。
2、在现场总线控制系统中,总线设备主要分为6类:变送器/传感器;执行器;控制器;监控/监视计算机;现场总线网桥/网关;其它现场总线设备,如人机界面、条形码识别器等。
3、现场总线具有数字化、开放性、分散性、互操作性、互换性、现场环境的适应性等特点。
4、模拟数据编码的三种编码方法是:ASK(幅度键控)、FSK(频移键控)、PSK(相移键控)。
5、较为常见的网络拓扑结构有星形、环形、总线形和树形。
6、网络中常用的传输介质有:电话线、同轴电缆、双绞线、光纤、无线与卫星通信。
7、传输介质的特性主要包括:物理特性、传输特性、连通特性、地理范围、抗干扰性、相对价格。
8、按连接距离分类网络可分为局域网、城域网和广域网。
9、服务原语可分为请求、指示、响应、证实4类。
10、ISO OSI开放系统互联参考模型分为7层,即物理层、数据链路层、网络层、传输层、会话层、表示层、应用层。
11、TCP/IP参考模型分为4层,即主机至网络层、互联网层、传输层、应用层。
12、标准格式的CAN数据帧,不计填充位,最短为44位,最长为108位。
若计填充位,最短为44位,最长为132位。
13、在CAN总线中存在5种不同的错误类型,即:位错误、填充错误、CRC错误、形式错误、应答错误。
14、CAN总线在传输速率为5kbps及其以下时,传输距离可达10Km;传输距离在40m及其以下时,传输速率可达1Mbps。
15、CAN总线报文传送由4种不同类型的帧表示和控制:数据帧、远程帧、错误帧、超载帧。
16、CAN总线数据帧由7个不同的位场组成:帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结束。
17、PROFIBUS现场总线由3个兼容部分组成,即PROFIBUS-DP、PROFIBUS-PA和PROFIBUS-FMS。
18、CAN总线错误帧的位长度为14~20。
19、本质安全技术是指保证电气设备在易燃、易爆环境下安全使用的一种技术。
它的基本思路是限制在上述危险场所中工作的电气设备中的能量,使得在任何故障的状态下所产生的电火花都不足以引爆危险场所中的易燃、易爆物质。
20、PROFIBUS-DP协议是为自动化制造工厂中分散的I/O设备和现场设备所需要的高速数据通信而设计的。
PROFIBUS-PA是PROFIBUS的过程自动化解决方案。
PROFIBUS-FMS 的设计旨在解决车间一级的通信。
22、 PROFIBUS主站具有总线存取控制权,从站没有总线存取控制权。
23、DP主站与DP从站间的通信基于主-从原理,一个报文循环由DP主站发出的请求帧(轮询报文)和由DP从站返回的有关应答或响应帧组成。
24、PROFIBUS采用混合的总线存取控制机制,即在主站之间采用令牌传送方式,主站与从站之间采用主从方式。
25、DP主站(1类)循环地与DP从站交换用户数据:PLC、PC或可以做1类主站使用的控制器。
2类DP主站是操作元工作站、编程装置,诊断和管理设备,完成各站点的数据读写、系统配置、故障诊断等。
DP从站:PLC、分散式I/O、驱动器、传感器、执行机构等现场设备。
26、PROFIBUS-DP系统配置的描述包括:站点数目、站点地址和输入输出数据的格式,诊断信息的格式以及所使用的总体参数。
27、 PROFIBUS-DP诊断信息分为3类:本站诊断操作、模块诊断操作、通道诊断操作。
28、 PROFIBUS-DP主要有以下3种运行模式:运行、清除、停止。
29、工业以太网链路模块有光链路模块(OLM)和电气链路模块(ELM)。
30、工业以太网采用基于事件驱动机制的用户接口提高实时性。
二、单选题1、下面哪个国际标准不是关于现场总线的:A.IEC61158B.IEC62026C.ISO11898D.IEC1158 答案:(D)2、现场总线是当今3C技术发展的结合点,这里的3C是指:PUTER、COMMUNICATION、CONTROLB.CHINA、COMPULSARY、CERTIFICATIONPUTER、COMMUNICATION、CONTENTSD.CAD、CAPP、CAM答案:(A)3、下面哪个现场总线国际标准是关于低压开关设备和控制设备的:A.IEC61158B.IEC62026C.ISO11898D.IEC1158 答案:(B)4、在关于“道路交通工具数字信息交换”的国际标准ISO11898和ISO11519中以下列哪一通信速率区分高速和低速通信控制器局域网?A. 1MbpsB. 500KbpsC. 250 KbpsD. 125 Kbps 答案:(D)5、下列哪种现场总线是建筑业国际公认的现场总线标准?A. LonworksB. HARTC. CC-LinkD. Sensoplex2 答案:(A)6、双绞线按规则螺旋结构排列的目的是A. 使各线对之间易于区别B. 使各线对之间的电磁干扰最小C. 使各线对的韧性更强D. 以上皆不是答案:(B)7、 SJA1000是:A. CAN控制器接口芯片B. CAN控制器驱动芯片C. 在片CAN控制器芯片D. 独立CAN控制器芯片答案:(D)8、标准格式的CAN数据帧,不计填充位,A. 最短为41位,最长为105位B. 最短为42位,最长为106位C. 最短为44位,最长为108位D. 最短为47位,最长为111位答案:(C)9、标准格式的CAN数据帧,若计填充位,A. 最短为42位,最长为125位B. 最短为42位,最长为129位C. 最短为44位,最长为127位D. 最短为44位,最长为132位答案:(D)10、 CAN总线使用的数据编码是:A. 归零码(RZ)B. 非归零码(NRZ)C. 曼彻斯特编码D. 差分曼彻斯特编码答案:(B)11、在CAN总线中,当错误计数值大于多少时,说明总线被严重干扰?A. 96B. 127C. 128D. 255 答案:(A)12、在CAN总线2.0B技术规范中,扩展帧具有的标识符位数为:A. 8位B. 11位C. 15位D. 29位答案:(D)13、ISO11898对CAN总线典型电平规定如下:A. 显性:VCAN–H=VCAN–L=2.5V,Vdiff =0V;隐性:VCAN–H=3.5V,VCAN–L=1.5V, Vdiff =2V。
B. 隐性:VCAN–H=VCAN–L=2.5V,Vdiff =0V;显性:VCAN–H=3.5V,VCAN–L=1.5V, Vdiff =2V。
C. 显性:VCAN–H=1.75V,VCAN–L=3.25V, Vdiff =-1.5V;隐性:VCAN–H=4V,VCAN –L=1V,Vdiff =3V。
D. 隐性:VCAN–H=1.75V,VCAN–L=3.25V, Vdiff =-1.5V;显性:VCAN–H=4V,VCAN –L=1V,Vdiff =3V。
答案:(B)14、 CAN总线两端应加终端电阻,其标准阻值为:A. 75ΩB. 120ΩC. 200ΩD. 330Ω答案:(B)15、 CAN总线中,若具有下列报文ID的4个标准格式数据帧争用总线,胜出的是:A. 11001100001B. 11001101001C. 11001000001D. 11001000010 答案:(C)16、使用CAN控制器接口PCA82C250的CAN总线系统,总线至少可连接多少个节点?A. 32个B. 64个C. 110个D. 127个答案:(C)17、采用海明码纠正一位差错,若信息位为7位,则冗余位至少应为A. 5位 B .3位 C .4位 D. 2位答案:(C)18、采用曼彻斯特编码的数字信道,其数据传输速率为波特率的A .2倍B .4倍C .1/2倍 D. 1倍答案:(C)19、一个快速以太网交换机的端口速率为100Mbit/s,若该端口可以支持全双工传输数据,那么该端口实际的传输带宽为A.100Mbit/s B. 150Mbit/s C.200Mbit/s D.1000Mbit/s 答案:(C)20、在常用的传输介质中,()的带宽最宽,信号传输衰减最小,抗干扰能力最强。