视觉感兴趣区域的算法
基于视觉注意的图像感兴趣区域分割算法
S g e a i n a g rt m fi t r s t ci n r g o e m nt to l o ih o n e e tde e to e i ns ba e n v s a te to m e h nim s d o i u la t n i n c a s
sg e t i uodt t gR I rg no tr t g n e om e r ag b c . em na o i at—e ci O (ei fnee i )a dp r r sw l f reoj t tn n e n o i sn f lo l es
Vo . 6 No 2 12 .
2 1 年 4月 01
Ap . 2 r 011
文 章 编 号 :0 4—17 (0 1 0 O 1 0 10 4 8 2 1 )2一 11— 5
基 于 视 觉 注 意 的 图像 感 兴趣 区 域 分 割 算 法
程 聪 戴朝 辉 ,
( . 南财 经政 法大 学 计 算机 与信 息工程 学 院 ,河南 郑 州 4 0 0 ; 1河 5 0 2
o iu la tn in. r u h t e a ay i fi g ie s t i t o x rce h n e e td p r o h m - n vs a t to Th o g h n lsso ma e px l ,h s meh d e ta td t e i tr se a t ft e i e a e, n a c d t e i g sn hed va in d ge ewe n piesa d t e a e a e o ma e, n d m a e g e h n e h ma e u i g t e it e r e b t e x l n h v r g fi g a d ma e i g o m oe a c r ih vs a e u rm e t sn ec p in su y p n i l . p rme tlr s l h we h tt e r c o d w t iu lr q ie n s u i g p r e to t d r c p e Ex e i n a e ut s o d t a h i s p o o e t o o le t ilg c lv s a te to e h n s , i h i lo e fci e t e u e o e — r p s d me h d c mp i sw h b oo ia iu latn in m c a im wh c s as fe t o r d c v r i v
目的片段和载体的计算公式

目的片段和载体的计算公式目的片段和载体是计算机视觉和图像处理领域经常使用的概念,它们用于描述目标在图像中的位置和图像的特征。
目的片段,也被称为目标区域或感兴趣区域(Region of Interest,ROI),指的是在图像中我们感兴趣的部分,即我们希望从图像中提取出来的目标或目标的局部。
目的片段可以是一个区域,也可以是一个关键点或几何形状。
载体是指承载目的片段的图像或视频帧的一部分。
在计算机视觉和图像处理中,我们常常需要从载体中提取出目的片段或对载体进行分析和处理。
计算目的片段和载体的公式可以根据具体的场景和任务而不同,下面是一些常见的计算公式和相关的参考内容:1. 目标区域的位置和尺寸计算公式:- 矩形区域:可以使用矩形的左上角坐标(x,y)和宽度w、高度h来表示目标的位置和尺寸。
例如:(x, y, w, h)- 关键点或几何形状:可以使用关键点或几何形状的坐标来表示目标的位置。
2. 目标区域的特征计算公式:- 特征描述符:可以使用特征描述符(如SIFT、SURF或HOG)来表示目标的特征。
- 深度学习特征:可以使用卷积神经网络(CNN)来提取目标区域的特征。
3. 目标检测和定位的公式:- Haar级联分类器:使用Haar特征和级联分类器进行目标检测和定位。
参考内容:Viola, P., & Jones, M. (2001). Rapid object detection using a boosted cascade of simple features.- R-CNN系列算法:使用区域候选提取和卷积神经网络进行目标检测和定位。
参考内容:Girshick, R., et al. (2014). Rich feature hierarchies for accurate object detection and semantic segmentation.4. 目标跟踪的公式:- 卡尔曼滤波:使用卡尔曼滤波进行目标的状态估计和跟踪。
foc算法原理
foc算法原理
在计算机视觉和图像处理中,FOC(Focus of Attention)算法是一种用于确定图像中感兴趣区域的算法。
FOC算法旨在模拟人眼对视觉场景的关注点,以便集中处理和分析最相关的信息。
以下是FOC算法的一般原理:
1. 图像特征提取:FOC算法首先对图像进行特征提取,以识别可能的感兴趣区域。
这些特征可能包括颜色、纹理、边缘等。
2. 区域分割:基于提取到的图像特征,算法会对图像进行区域分割,将图像划分为不同的区域。
这些区域代表了图像中具有相似特征的部分。
3. 关注度计算:对每个区域进行关注度计算,以确定该区域在整个图像中的重要性。
关注度计算可以根据不同的规则和算法进行,其中可能包括颜色强度、纹理对比度、边缘密度等因素。
4. 生成关注图:将计算得到的关注度映射到原始图像上,生成关注图。
在关注图中,亮度或颜色较高的区域表示在FOC算法中被认为是重要的区域。
5. 感兴趣区域提取:基于生成的关注图,FOC算法确定最终的感兴趣区域,这些区域在图像分析或处理中可能会受到重点关注。
FOC算法的实现可以采用各种技术和方法,包括机器学习、模型训练、图像处理等。
这使得FOC算法能够根据特定的应用场景和需求进行调整和优化。
总体而言,FOC算法的目标是通过模拟人眼的注意机制,自动确定图像中最引人注目的区域,从而提高计算效率和系统性能。
roi区域自动提取
roi区域自动提取
ROI(感兴趣区域)是指在一张图像或视频中,用户所关注的感兴趣区域。
在计算机视觉和图像处理领域,自动提取ROI是十分重要的任务。
一般而言,自动提取ROI可以通过分割算法实现。
分割算法基于图像中的不同颜色、纹理、形状等特征来识别ROI。
其中,最常用的分割算法是基于阈值法的分割,即根据图像亮度或颜色信息进行二值化处理,将像素点分为ROI和背景两类。
还有一些高级算法,如边缘检测和形态学滤波器等,可以提高提取ROI的精度和效率。
除了基于图像处理的自动提取方法以外,还可以使用深度学习算法进行ROI的自动提取。
深度学习算法利用神经网络来学习感兴趣的区域,并通过学习结果进行自动提取。
总之,自动提取ROI是计算机视觉和图像处理领域的重要任务,可以减轻人工干预的工作量,提高工作效率。
opencv——感兴趣区域(ROI)的分析和选取[详细总结]
![opencv——感兴趣区域(ROI)的分析和选取[详细总结]](https://img.taocdn.com/s3/m/81389d14fe00bed5b9f3f90f76c66137ee064fa3.png)
opencv——感兴趣区域(ROI)的分析和选取[详细总结]引⾔在利⽤OpenCV对图像进⾏处理时,通常会遇到⼀个情况,就是只需要对部分感兴趣区域进⾏处理。
因此,如何选取感兴趣区域呢?(其实就是“抠图”)。
在学习opencv的掩码运算后,尝试实现⼀个类似halcon的reduce_domain功能,对于实现抠图的过程中,需要掌握的要点就是位运算符和copyTo函数 位运算符的相关API:void bitwise_and(InputArray src1, InputArray src2, OutputArray dst); //dst = src1 & src2 “与”操作void bitwise_or(InputArray src1, InputArray src2, OutputArray dst); //dst = src1 | src2 “或”操作void bitwise_xor(InputArray src1, InputArray src2, OutputArray dst); //dst = src1 ^ src2 “异或”操作void bitwise_not(InputArray src, OutputArray dst); //dst = ~src “⾮”操作copyTo函数它的定义OpenCV中image.copyTo()有两种形式:1、image.copyTo(imageROI),作⽤是把image的内容复制到imageROI;2、image.copyTo(imageROI,mask),作⽤是把原图(image)和掩膜(mask)与运算后得到ROI区域(imageROI)。
mask就是位图,如果mask像素的值是⾮0的,我就拷贝它,否则不拷贝。
(⾮零的位置就是原图中的那些需要拷贝的部分)正⽂部分对于感兴趣区域(Region of Interest, ROI)的选取,⼀般有两种情形:1)已知ROI在图像中的位置;2)ROI在图像中的位置未知。
8种目标检测算法
8种目标检测算法目标检测是计算机视觉领域中一个重要的任务,其目标是在图像或视频中准确地定位和识别出感兴趣的物体。
在过去的几十年中,研究者们提出了许多不同的目标检测算法,旨在提高检测的准确性和效率。
本文将介绍8种经典的目标检测算法,并对它们进行详细比较和分析。
1. R-CNN (Region-based Convolutional Neural Network)R-CNN是一种经典的目标检测算法,它通过两个步骤来进行目标检测:候选区域生成和分类。
首先,R-CNN使用选择性搜索(Selective Search)等方法生成一系列候选区域。
然后,每个候选区域被送入卷积神经网络(CNN)进行特征提取,并使用支持向量机(SVM)进行分类。
虽然R-CNN在准确性上表现良好,但其速度较慢。
2. Fast R-CNNFast R-CNN是对R-CNN的改进,主要通过引入全连接层来解决R-CNN中多次计算相同特征的问题。
Fast R-CNN首先将整个图像输入到CNN中获取特征图,然后根据候选区域的位置从特征图中提取相应的区域特征。
这些区域特征被送入全连接层进行分类和边界框回归。
相比于R-CNN,Fast R-CNN具有更快的速度和更好的检测性能。
3. Faster R-CNNFaster R-CNN是在Fast R-CNN的基础上进一步改进的算法。
它引入了一个称为“区域提议网络”(Region Proposal Network,RPN)的组件,用于生成候选区域。
RPN通过滑动窗口在特征图上移动,并预测每个位置是否包含目标以及对应的边界框。
生成的候选区域被送入Fast R-CNN进行分类和回归。
Faster R-CNN将目标检测任务拆分为两个子任务,从而实现了端到端的训练和推断。
4. YOLO (You Only Look Once)YOLO是一种非常高效的目标检测算法,它采用了完全不同于传统方法的思路。
YOLO将目标检测问题转化为一个回归问题:给定图像,直接在图像上划分网格,并预测每个网格中是否包含目标以及对应的边界框和类别概率。
roi编码实现原理

roi编码实现原理
ROI编码,全称为感兴趣区域编码,是一种基于主观质量衡量标准的视频编码技术。
在视频编码过程中,我们可以对感兴趣区域进行低压缩比,甚至是无损压缩编码,以获得高质量的重建图像,而对非关注区域采用较高压缩率。
具体实现原理如下:
首先,在视频编码前,需要对输入的视频场景进行视觉感知分析以确定感兴趣区域。
这个过程可以通过一些机器学习或深度学习算法来完成,例如卷积神经网络(CNN)。
然后,在编码过程中,通过调整编码参数,为感兴趣区域分配更多码率,使其拥有更好的视觉质量。
具体来说,对图像中感兴趣的区域降低量化参数值,从而分配更多码率以提升画面质量。
而对不感兴趣的区域则提高量化参数值,从而分配更少码率。
这种码率分配方案的编码结果将会比传统的分配码率的结果有更好的主观视觉质量。
因为在同样的码率限制下,这种方案在不损失图像整体质量的前提下,可以降低视频码率。
以上信息仅供参考,如需更多信息,建议访问WPS官网或咨询专业信息技术人员。
视觉识别 计数算法
视觉识别计数算法引言视觉识别计数算法是一种通过计算机视觉技术,对图像或视频中的目标进行自动识别和计数的方法。
该算法可以广泛应用于各种领域,如交通监控、人流统计、货物管理等。
本文将介绍视觉识别计数算法的原理、应用场景以及一些常用的算法模型。
视觉识别计数算法原理视觉识别计数算法的原理基于计算机视觉技术,主要包括目标检测和目标计数两个步骤。
目标检测目标检测是指在图像或视频中,通过算法自动识别出感兴趣的目标物体。
常用的目标检测算法包括基于深度学习的卷积神经网络(Convolutional Neural Network,CNN)和基于传统机器学习的方法。
基于深度学习的目标检测算法基于深度学习的目标检测算法在近年来取得了显著的进展,尤其是基于卷积神经网络的方法。
其中最经典的算法是Faster R-CNN(Region-based Convolutional Neural Networks)和YOLO(You Only Look Once)。
Faster R-CNN算法通过引入区域提议网络(Region Proposal Network,RPN),实现了高效的目标检测。
它首先在图像中生成一系列候选框,然后通过RPN网络对这些候选框进行分类和回归,最终得到目标检测的结果。
YOLO算法则是一种实时目标检测算法,它将目标检测问题转化为一个回归问题。
YOLO将图像划分为网格,并在每个网格上预测目标的类别和位置。
这种设计使得YOLO能够在速度和准确率上取得平衡,适用于实时应用。
基于传统机器学习的目标检测算法除了深度学习方法,还有一些基于传统机器学习的目标检测算法,如Haar特征分类器和HOG(Histogram of Oriented Gradients)。
Haar特征分类器是一种基于特征的目标检测算法,它通过计算图像中的Haar-like 特征来检测目标。
该算法在速度上较快,但准确率相对较低。
HOG算法则是一种基于图像梯度的目标检测算法,它通过计算图像中每个像素点的梯度方向来提取特征,并通过支持向量机(Support Vector Machine,SVM)进行分类。
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法Blob分析法(BlobAnalysis)在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。
Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。
其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。
简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。
如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。
而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。
在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。
图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。
这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。
常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。
显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像; 2.必要的图像特征不能用2个灰度级描述; 3.按照模版检测(图形检测需求)。
总的来说,Blob 分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
计算机视觉技术中常见的目标检测算法

计算机视觉技术中常见的目标检测算法在计算机视觉领域中,目标检测是一项重要的任务,旨在从图像或视频中准确地识别和定位出特定的目标。
随着计算机技术的快速发展,目标检测算法也在不断进步和演变。
本文将介绍一些计算机视觉技术中常见的目标检测算法。
1. R-CNN(区域卷积神经网络)R-CNN是目标检测算法中的经典方法之一。
它采用两步策略来解决目标检测问题。
首先,使用选择性搜索算法生成可能包含目标的候选区域。
然后,将这些候选区域输入卷积神经网络(CNN)进行特征提取和分类。
R-CNN通过使用CNN提取图像特征,相比传统方法具有更高的准确性。
2. Fast R-CNN(快速区域卷积神经网络)Fast R-CNN是对R-CNN算法的改进。
它引入了感兴趣区域池化(RoI pooling)层,将不同大小的感兴趣区域统一为固定大小的特征向量。
这种池化操作在计算效率上具有优势,并使得Fast R-CNN比R-CNN更快速、更准确。
3. Faster R-CNN(更快速的区域卷积神经网络)Faster R-CNN是在Fast R-CNN的基础上进一步优化的算法。
它引入了候选区域生成网络(Region Proposal Network,RPN),用于自动化地生成候选区域。
通过共享特征提取和候选区域生成的过程,Faster R-CNN实现了端到端的目标检测。
相较于R-CNN和Fast R-CNN,它在准确性和速度上都有了显著的提升。
4. YOLO(你只需学会一个目标检测算法)YOLO是一种实时目标检测算法,其特点在于速度快、准确性高。
YOLO将目标检测问题转化为一个回归问题,通过在图像网格中预测边界框的坐标和类别,实现对目标的检测和分类。
YOLO算法的优点在于快速、简单,适用于实时应用。
5. SSD(单发多框检测器)SSD是一种基于卷积神经网络的目标检测算法,其主要思想是在不同尺度上检测目标。
SSD通过在不同层的特征图上应用不同大小的卷积核,实现对不同尺度目标的检测。
图像感兴趣区域自动提取算法
图像感兴趣区域自动提取算法摘要:感兴趣区域(Regions of Interest)提取技术在图像处理和分析领域有着重要地位。
提出了一种ROI的自动提取算法。
在显著度图和相对位置指示图的基础上,采用基于子区域的区域生长法,以像素点的显著度、相对位置及颜色纹理信息作为生长条件,颜色、纹理信息的权重可以根据图像的内容自适应调整。
实验结果表明,该方法与现有算法相比在速度和ROI提取的准确性方面均有提高。
关键词:感兴趣区域,显著度图,区域生长Automatic Extraction of Regions of InterestAbstract:The extraction technique of ROI plays an important role in image analysis.In this paper an automatic extraction of ROI algorithm is proposed.Based on the saliency map and relative position map,use the subregion based region grow method,besides the saliency map and relative positions,this paper joined the information of color and texture.The power of color and texture can adjusted by image content automatically.The experiment prove this algorithm is efficient and effective.Key words:Regions of Interest,saliency map,region grow1引言感兴趣区域(Regions of Interest简称ROI)即图像中最能引起用户兴趣,最能表现图像内容的区域,如能提取出这些区域将会大大提高图像处理和分析的效率和准确度。
常见的计算机视觉算法

常见的计算机视觉算法计算机视觉算法是人工智能领域的一个重要分支,致力于使计算机能够模拟人类的视觉系统,从图像或视频数据中获取有用的信息。
本文将介绍几种常见的计算机视觉算法,包括目标检测、图像分类和图像分割。
一、目标检测算法目标检测是计算机视觉中的一个关键任务,其目标是在图像或视频中准确地定位和识别出感兴趣的物体。
常见的目标检测算法包括:1. R-CNN(Region-based Convolutional Neural Networks):该算法首先通过选择性搜索(Selective Search)等方法生成一系列候选区域,然后对每个候选区域进行特征提取和分类,最后利用回归模型对检测框进行精确定位。
2. Faster R-CNN:该算法引入了区域生成网络(Region Proposal Network),将候选区域的生成和特征提取合并在一个网络中,从而提高了检测的速度和准确率。
3. YOLO(You Only Look Once):该算法将目标检测问题转化为一个回归问题,通过将图像划分为多个网格单元,预测每个单元中是否存在目标及其位置和类别信息,从而实现实时的目标检测。
二、图像分类算法图像分类是计算机视觉中最基础和常见的任务,其目标是将输入图像分为不同的类别。
常见的图像分类算法包括:1. 卷积神经网络(Convolutional Neural Networks,CNN):该算法通过多层卷积和池化操作,自动学习图像的特征表示,并通过全连接层进行分类。
CNN在图像分类任务中取得了巨大的成功,成为目前最主流的算法之一。
2. 支持向量机(Support Vector Machine,SVM):该算法通过构建一个超平面来分割不同类别的图像,并将其分类。
SVM在图像分类中具有较好的分类性能和泛化能力。
3. 随机森林(Random Forest):该算法通过构建多个决策树,并利用投票机制进行分类。
随机森林在图像分类中具有较好的鲁棒性和可解释性。
卫星应用中基于视觉显著性的感兴趣区域图像编码算法

编算 。验 明该 法 有 好 编 效 而 码 法 实 表 , 算 具 较 的 码 果,
}: a { : m2… ¨¨ I j ayi = I 蔓 l _ = 】 ¨ : l i
—— ~ _ — = _ —
换 后的 图像数 据 ,采用 树状 结构 构成 组成 如 图 1 示 的 所
像编码 算法相比 ,本文算法结构简单,便 于实现 ;拥有优 秀的主观视觉质量 ,符合人眼的感知,在高压 缩比下能 够为用户提 供更多的信息。另外,本文算法可以作 为 C DS标准 中的感兴趣 区域编码算法。 CS
关键词 :遥感 图像; 图像 压缩;感兴趣 区域 ;视 觉显著性
中 图分 类 号 :T 3 1 P 9 文 献标 志码 :A d i 03 6 ̄i n10 -0 X.0 01.1 o :1 . 9 .s.0 35 1 2 1.2 7 9 s 0
E ma : i xn mal u t d .l - i t n i@s i s e u l l a . . e。 h第3Fra bibliotek7卷第 1 2期
田 昕 等 :卫星应 用中基于视觉显著性的感兴趣 区域 图像 编码算法
9 7
JE 00等 。在 JE 2 0 P G20 P G 0 0中 ,提 出 了两 种标 准 的 R 算 法 ,一 种是 基于 偏移 的一 般算 法 ,另一 种是 最 OI
卫 星应 用 中基 于 视 觉 显 著 性 的
基于高级视觉特性的感兴趣区域判定算法
纳, 但有 时候它并不 能够完 全反映真实 的人类视觉特性 , 因此 随之而来 出现 了许 多基于 视 觉特 性 的视频 图像改进 编 码方 案 “ 。早 期的视觉模型主要 是利 用人 眼视觉 对不 同频 带信 号的感知差异 , 它们所 关心 的是压 缩编 码系统 产生 的误差是 否为人眼可见 ( 不考虑这些 误差 的分布位置 ) 这些方 法在一 , 定程度上获得成功 。然 而现今许 多应 用 系统 当中, 如窄 带视 讯会议系统 、 医疗 以及遥感 等 , 都允许 图像的质量出现不均匀 的分配 , 即允许某些人 们感 兴趣 的区域 的质量 要相对 高 : 于其 他 区域。换句话说 , 人类视觉 系统在观察 图像 的时候 , 对于 图 像 中某些部分 的误 差关注 程 度 明显 是要 高于其 他周 围区域 的。 么 , 那 如何 去识 别 出不 同图像 区域 对人类 视觉 的重 要程 度则是我们研究的重点 。
Ab t a t s r c :A a i l o i m o e au t h mp ra c f d f r n e in i h i e c n s wa p o oe . T e r p d ag r h t v l ae t e i o tn e o i e e t r go s n t e v d o s e e s r p s d t h p n i l fte ag r h i t k o r s o d n iu o tn ee tmae f e me td r go sb n l zn h d a c d i r cp e o l oi m s o ma e c re p n i g vs a i h t l mp ra c si tso g n e e in y a ay i g t e a v n e s
基于眼动感知信息的彩色图像感兴趣区域提取算法
准则提取 出一 系列初始感兴趣 区域 ,最后将这些 区域按 照被 试的 “ 关注度”进行排序得到最终 的感兴趣 区域 。算
法在 R 、HS GB V、L a b等颜 色空 间 中进 行 了测 试 。 实验 结 果表 明 ,提 出 的 算 法在 RG 和 H V 色彩 空 间 中得 到 ** B S 的 感 兴趣 区域 更 加 符 合 人 的 主观 感知 , 具 有 一 定 的应 用价 值 关键 词 :视 觉 感 知 ; 图像 显 著 性 分析 ; 感 兴趣 区域 ; 眼动 仪 ; 区域 生 长 中图分类号:T 3 1 P 9 文 献 标 志 码 :A d i 1.9 9 .s. 0 —0 X.0 1 40 0 o : 03 6  ̄i n1 35 1 2 1. .2 s 0 0
第 3 卷 第 4期 8
2 1 年 4月 01
光 电工程
Op o El cr n cEn i e i g t — e to i g ne rn
Vl13 NO. 0 . 8. 4 A p i,201 rl 1
文 章编 号 :1 0 — 0 X(0 0 — 15 0 0 3 5 1 2 1)4 0 — 9 1 1
Ha g h n ̄ ouD i n i e s t H a gz u 31 a ziUn v r i y, n ho 001 ,Ch n 8 i a;
2 De a t e t f a i o y U i r i f is ug , A 1 2 3 U A ) . p r n R do g , nv syo P t b rh P 5 1 , S m o l e t t A sr c : e in o t et R I xrc o lo i m f oo g s rp s d w i ae nt ec sia b ta t A R g o f ne s ( O )e t t n ag r h o l i ei p o o e , hc i b sd o l s l I r ai t c r ma hs h a c
拉框标注算法

拉框标注算法
拉框标注算法是一种计算机视觉领域中的图像标注技术,也称为区域标注算法。
该算法通过在图像中选择一个矩形区域,将其作为感兴趣区域来进行标注。
一般情况下,拉框标注算法用于标注图像中的目标物体,以便计算机能够识别和定位这些物体。
拉框标注算法的主要思想是通过手动或自动的方式选择感兴趣的物体区域,并将其标记出来。
这个过程可以通过计算机视觉领域中的图像分割技术来实现,例如基于阈值的分割、区域生长等技术。
同时,也可以采用深度学习技术,通过训练神经网络来自动进行图像标注。
拉框标注算法的应用十分广泛,既可以用于计算机视觉领域中的物体检测和识别,也可以用于医学图像分析、地理信息系统、机器人导航等领域。
通过使用拉框标注算法,可以准确地标注出图像中的目标物体,提高计算机对图像的理解和应用能力,为人工智能技术的发展提供强有力的支持。
- 1 -。
图像感兴趣区域自动提取算法
根据图像 中局部 区域 内的颜色分布来估计像素 的相对 位 置 , 即点是 处 于物体 内部 还是 靠近 边缘 。 假 设 z表 示 颜 色类 图像 中 的所 有 Ⅳ 个像 素 点 集合 , 假设 =( y , ,) ∈Z, m代表均值 , 用 假定 集 合 z被分 为 C个 颜 色类 Z ,=12 …… , 。假 ii , , C
⑥ 2 0 S iTc. n n. 07 c. eh E gg
图 像 感 兴趣 区域 自动提 取 算 法
王 艳 娟 陈 晓 红 邹 丽
( 大连交通 大学软件学院 , 大连 16 5 102)
摘
要
感 兴趣 区域提取技 术在 图像处理 和分析领域 中有着 重要地位 。提 出了一种 R I的 自动提 取算 法, 显著度 图和 相 O 在
有点的注意度均值 , 代表其标准差 , 则种子区域 R 的点 可 以度量 为 : A R= e ( ”肿 一e ‘ - /  ̄ 一 () 5
值越 大 , 区 域 的 注 意 度越 大 , 置 越 靠 近 该 位 区域 中心 。 因此 , 应 的 区域 就 更 优 先 选 为种 子 区 对 域 。这里 为 了减 少 噪 声 的影 响 , 择 入×入的 小 区 选 域作 为种 子点 。经 实验 入= 。 5
1 算法描述
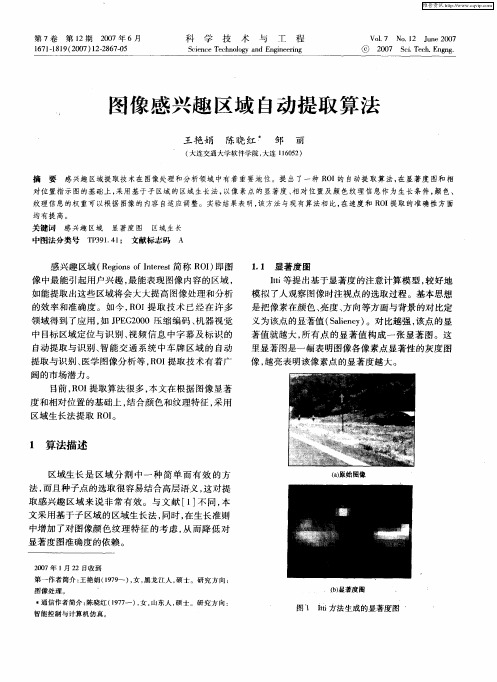
区域 生长 是 区 域 分 割 中一 种 简 单 而 有 效 的 方
( 原始 图像 a )
法, 而且种子点的选取很容易结合高层语义 , 这对提 取 感兴 趣 区域 来 说 非 常 有效 。 与 文 献 『 ] 同 , 1不 本 文采 用基 于子 区域 的 区域生 长法 , 同时 , 生长 准则 在
14 颜 色 、 . 纹理 特征 描述
14 1 颜 色特征 ..
roi区域面积码率曲线
roi区域面积码率曲线
摘要:
1.ROI 区域的概念
2.面积码率曲线的含义
3.ROI 区域面积码率曲线的应用
4.总结
正文:
1.ROI 区域的概念
ROI(Region of Interest)区域,即感兴趣区域,是在图像处理、计算机视觉和机器学习领域中经常使用的一个概念。
它是指图像中被用户选定并关注的一个特定区域,通常用于进行特定目标的识别、分析和处理。
2.面积码率曲线的含义
面积码率曲线是一种描述图像中感兴趣区域(ROI)的编码方式。
它将图像中的ROI 区域按照面积大小进行排序,然后将这些区域的编码信息按照一定的码率进行压缩。
这样,在保证图像质量的前提下,可以降低图像的存储空间和传输带宽的需求。
3.ROI 区域面积码率曲线的应用
ROI 区域面积码率曲线在许多领域都有广泛的应用,例如:
(1)视频监控:在视频监控系统中,通过对ROI 区域的编码和传输,可以有效降低视频数据的量,从而提高视频的传输速度和存储效率。
(2)图像压缩:在图像压缩领域,ROI 区域面积码率曲线可以为图像的
压缩提供更多的信息,从而提高压缩效果和压缩速度。
(3)目标检测:在目标检测和识别领域,ROI 区域面积码率曲线可以帮助算法更快地定位目标,提高检测的准确性和速度。
4.总结
ROI 区域面积码率曲线作为一种重要的图像处理技术,可以帮助我们更好地对图像中的感兴趣区域进行编码、压缩和分析。
感兴趣区域的边界点

感兴趣区域的边界点【原创版】目录1.感兴趣区域的边界点概述2.感兴趣区域的边界点的应用3.如何确定感兴趣区域的边界点4.结论正文一、感兴趣区域的边界点概述在许多应用场景中,我们可能需要对某个特定的区域进行分析、处理或者研究,这个区域可以是一个地理区域、一个图像区域或者其他类型的区域。
在处理这些区域时,我们需要首先确定这个区域的边界点,即该区域的最外延边界上的点。
这些边界点将这个区域与其他区域分隔开来,是描述和定义该区域的关键要素。
二、感兴趣区域的边界点的应用1.在地理信息系统(GIS)中,确定感兴趣区域的边界点有助于进行地理数据的分析和处理,例如在地图上绘制区域的范围、计算区域的面积等。
2.在计算机视觉领域,感兴趣区域的边界点可用于图像分割,即将图像中具有相似特征的像素归为一类。
这对于目标检测、图像识别等任务具有重要意义。
3.在数据挖掘领域,确定感兴趣区域的边界点有助于挖掘数据集中有价值的信息。
例如,在研究某个产品的销售情况时,我们可以将销售区域作为感兴趣区域,通过分析边界点来确定哪些地区的销售情况较好,从而制定针对性的营销策略。
三、如何确定感兴趣区域的边界点确定感兴趣区域的边界点通常需要以下步骤:1.收集数据:首先需要收集描述感兴趣区域的数据,这些数据可以是地理坐标、图像像素值等。
2.确定边界点的类型:根据应用场景和需求,确定需要寻找的边界点类型。
例如,在地理信息系统中,我们可能需要找到区域的最北、最南、最东、最西四个边界点;在计算机视觉领域,我们可能需要找到图像中物体边缘的边界点。
3.分析数据:根据所确定的边界点类型,对数据进行分析。
例如,在地理信息系统中,可以通过计算区域内各点的经纬度来找到最北、最南、最东、最西四个边界点;在计算机视觉领域,可以通过图像处理算法(如Canny 边缘检测)来找到物体边缘的边界点。
4.输出结果:将分析得到的边界点输出,以便在后续的应用中使用。
四、结论确定感兴趣区域的边界点是许多应用场景中的关键步骤,对于正确处理和分析感兴趣区域具有重要意义。
A O I 视 野 算 法 ( 2 0 2 0 )
游戏的AOI算法云风的Blog并进行【现场实操追-女孩资-源】整理而写。
AOI(Area Of Interest),中文就是感兴趣区域。
通俗一点说,感兴趣区域就【扣扣】是玩家在场景实时看到的区域;也就是AOI会随着英雄的移动改变【⒈】而改变。
游戏的AOI算法应该算作游戏的基础核心了,许多逻辑都【О】是因为AOI进出事件驱动的,许多网络同步数据也是因为AOI进【1】出事件产生的。
因此,良好的AOI算法和基于AOI算法的优化,是提【б】高游戏性能的关键。
我在实践【⒐】中所熟知的游戏AOI算法大致有4种,在此做一些总结,顺【5】便梳理一下,打算设计出一套统一的接口封装不同的算法实现。
4种【2】算法:全场景同步法(最粗暴简单)、网格法、十字链表法、热点法(【6】云风设计的,暂且叫这个名字)。
统一接口设计:AOI需求大概是这样:1.游戏地图上有一些npc和玩家在移动,每一个这样移动的对象我们叫做AOIEntity,每一个AOIEntity可以挂多个不同半径的AOI,每一个这种半径的AOI单元我们叫做AOINode,如此,AOIEntity拥有多个AOINode,然后每一个场景管理者AOIManager管理着多个这样的AOIEntity对象。
2.AOI进出事件由三种行为产生:进入场景,离开场景,在场景移动,因为这是AOIEntity相互之间的作用,故因放在AOIManager中统一管理,接口类似这样:voidAOIManager:Enter(AOIEntity *entity, cosnt Point target_pos);void AOIManager:Move(AOIEntity *entity, cosnt Point target_pos);void AOIManager:Leave(AOIEntity *entity);3.添加一个AOINode的接口,主要参数是Id(用于标识这个AOI),半径,进出事件的callback函数:void AOIEntity:AddNode(int aoi_id, float radius, AOICB enter_cb, AOICB leave_cb);4.获取周围对象和观察者玩家对象集合的接口,这个可以在更上层,通过在响应进出事件的enter_cb, leave_cb中维护这样的集合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定义视觉感兴趣区域的算法:眼球注视点的比较Claudio M.Privitera and Lawrence W. Stark, Fellow, IEEE摘要-很多机器视觉应用,如压缩,图案数据库查询,以及图像理解,经常需要用来详细分析图像中的一个代表子集, 它可能会被排列成一组被称作视觉感兴趣区域(ROIs)的位点。
我们已经研究和开发了一种方法,其用于自动识别aROls这样的子集(根据算法检测的ROI),使用不同的图像处理算法,IPAs,和适当的聚类过程。
在人类感知,一个内在的表现指示着自上而下,上下文相关的眼球运动序列,以注视hROls的相似的序列(人识别的ROI).在这篇论文中,我们引进我们自己的方法并且我们用aROLs比较hROLs 来作为一个评估和选择自下而上的算法的标准。
最后,一个应用程序会被论述。
关键词:眼球运动,扫描途径理论,感兴趣的认同和比较区域1 引言眼球运动是人类视觉的重要组成部分因为它们必须使用视网膜中的小凹,最终,视觉注意到的图像的每个部分,会被固定,并与高分辨率处理。
平均每秒三眼的注视一般发生在积极寻找之中;这些快速的眼跳会穿插在眼睛注视之中,被称为扫视,在此期间,视力被抑制。
只有一小部分的眼睛注视(hROIs,人体检测的感兴趣区域)会被经常被大脑需要去做识别一个复杂的视觉输入(图1,上图)。
我们一直在研究和界定一个这种基于数字图像智能处理的复杂的认知机制的计算模型。
图像处理算法,IPAs,通常被用来检测和定位在数字图像分析的特定特征,例如,空间频率,纹理构象,或对视觉刺激的位点的其它信息的值。
应用一个IPA到图像意味着改变这种图像变为定义相应的算法特征像素值的新范围。
变换的图像的局部最大值代表位点,其中该特定的特征是特别突出的,他们可以被用作基础或识别aROIs,被算法检测的感兴趣区域。
许多局部最大值可以由图像变换来生成:因此,一个聚类过程是必需的,以减少在初始的大的局部最大值变成aROIs(图1,下图)的一个最后的小的子集。
aROIs和hROIs可以通过对其空间位置或结构性结合的分析,以及时间次序或顺序性结合的分析来互相比较。
这些比较的结果衡量的IPA的能力,和它的集聚过程一起来预测hROIs。
因此,我们的目标和我们的措施定量是明确的。
首要的问题是,IPAs是否能像人类连续瞥眼那样对待一张图片。
在第2节中,以获得眼睛运动数据为目的的实验方案会被进行了详细讨论。
第3节是专门定义一系列的IPAs的。
在第4节中,聚类和排序问题会被讨论。
用于比较hROIs和aROIs 计算和统计平台会在第5节被介绍。
在第6节我们讨论自上而下的视野和人类扫描途径。
在第7节,比较的结果会被讨论,而最后在第八节,我们会展示一个应用。
2 刺激的表现形式以及眼部移动的测试计算机控制实验展示图片并且仔细测量使用摄像机来观察眼球运动[21]。
红外源光被投射向被检体的眼睛,在角膜上产生一个明亮的浦肯野反射,这种反射是很容易被一个视频摄像机和眼睛跟踪服务器来跟踪的。
受试者被指示观看有眼睛跟踪功能的计算机屏幕上的视觉刺激(对于之前和之后的数据采集的持续时间4秒,加长校正周期)。
受试者坐在在屏幕的前面,他的头固定到一个固定下巴的结构。
观看距离是从计算机屏幕到受试者约40厘米;刺激大小是平均为15厘米×20厘米,约21×29度的对向视角,并且眼点位置记录系统的所得准确性是以视觉角度1度的量级的一半。
一个固定的分析算法被应用到眼球移动的数据,从眼睛注视的位置来分别快速地进行跳跃扫视(图1,右上面板,正方形,注意眼球运动采样,左上面板)。
在眼动实验中使用的七个科目。
15种不同的图像被使用,包括地形照片,风景,和绘画。
我们还使用了一些视觉刺激,对图像的修改,如浮雕效果或二进制阈值。
我们不会给出具体的说明。
所有受试者以前都看过每个画面至少一次。
不熟悉观看的影像可能会影响眼球运动模式[26],它可能相应让部分受试者的实验结果产生偏差。
由于所有的观察者有一定程度地熟悉图片,而且因为没有提供任何具体的任务,我们相信每一个观察者都会用直观和自然的内在认知模型来看图片。
(第6部分)每个受试者被要求重复在几天之内的实验,共4次观看次数,用时超过大约两个星期。
通过比较不同的观看会议,我们可以研究每个受试者看着特定的视觉刺激的方式的一致性,并且我们用算法来比较一致的结果。
在每个实验运行过程中,图像的完整序列,每次但顺序不同,都被显示给受试者看。
3 用于识别aROIS图像处理算法(IPAS)一个通用的图象的信息内容能够通过用不同的图像参数被抽取,进而,可以被相关的IPAs 识别。
在这个意义上说,应用算法到一个图像是在把该图像分配成到不同的域,在那里,对于每个域,都有一组特定的参数被提取。
这些参数可能与人类视觉的重要特征的注意有关。
在我们的研究中,只有来自经处理的图像中的每个域的局部极大值的的位点被保留;这些最大值然后聚集以得到aROIs的一个固定数量。
3.1 算法一览1.X,一个7×7个像素,沿两条对角线正和负别处的X状掩模,被图像卷积。
我们还使用不同的高曲率掩模卷积,例如,“<”状掩模,其定义是直观的(见,例如,[14])。
一定数量的7×7像素的变量,在我们的实验中,以0.3×0.3,度×度的视角来相对应(如观察者距离的视觉刺激的函数)。
这个数量是被凭经验选择的,基于初步研究和其他一些因素,如更方便地计算。
2. S,对称性,一个结构的方法,似乎是一个非常突出的空间关系(参见,例如,[9])。
对于每个像素x,y的图像,我们定义一个局部对称性大小的量度S(X,Y)如下:(l)其中是点(x,y)的半径7的附近,沿水平和垂直轴定义。
被下列的等式定义:(2)第一个因子, , 是一个固定的高斯变量, 像素,而且d(·) 代表着距离函数。
第二个因子表示一个对称性的简化概念: 对应于这两像素的灰度强度的倾斜角的角度.该因子当两个点的梯度定向在同一方向上时达到最大值。
高斯表示距离权重函数,它引入了对称性评价的定位。
因此,我们对于对称性的定义是基于绕中心点的梯度的方向的[18]。
同时,替代地,轴向二次力矩归一化可被用于计算对称变换[6]。
W,离散小波变换,是用一个金字塔形算法分割图像谱成含低点水平/垂直低点(LH),水平低点四个空间频段/垂直高位(LH),水平高点/低点垂直(H,L),和水平高点/垂直高点(H,H)。
这是通过使用一对共轭的正交滤波器实现的,CQFs[24],它作为一个平滑滤波器(即移动平均值)和一个详细滤波器,分别(参见,例如[20])。
两个滤波器分别应用于所述输入图像的每个行和列上。
采样两个因素之后滤波,最终产生的四个八度的子带。
该过程被重复地施加到每个所得低频带产生了多分辨率分解成倍频程。
我们从Daubechies W(分贝)和Symlet W(SY)使用了不同的命令,基础[4]来定义CQF滤波器。
对于每个分辨率i,只有水平高点/垂直高点h,h的小波系数,同时,矩阵被保留(代表每个不同的分辨率的信息),这些被重新安置成一个最终的矩阵HH(具有相同的尺寸与原始图像)下述组合:其中n是锥体算法的最大深度(n = 3时,通常情况下),并且其中是返回输入矩阵的采样的拷贝HH矩阵运算:同时施加基本的上,下采样操作的逆过程的过滤过程。
,一个中心环绕7×7掩模,在该中心正和负中的周边,被卷积的图像。
,灰度的取向差,则也可能在早期视觉皮层(参见[11])。
中心环绕取向差测定首先通过卷积的图像与4的Gabor 掩模带角度0°,45°,90°,和135°。
对于每个像素,x,y,则标量四圈,然后用对应于四个不同取向的四个单位矢量相关联的结果。
方向向量,由这四个加权单位矢量的矢量来表示。
我们定义的中心环绕取向差变换如下:其中是7×7像素的邻域内计算平均方向矢量。
等式的第一因素达到中心像素和周围环境之间的差异高值。
第二个因素作为一个低通滤波器,用于对特征定向。
, 每单位面积的边缘单位。
使用Sobel算子[3]的Canny算子的扩展被检测的边缘的图像,然后聚集为洞察力和心理学观念与高斯R =3个像素(见[19]检测的所述边缘来确定上边缘)。
,熵局部的计算. 其中心像素的7×7周围区域和G中的第i灰度级的频率的灰度级。
这一因素定义局部最大值强调质感差异。
C, 迈克尔森对比,是最有用的鉴别高对比度的元素,对于人类视觉,一般被认为是一个重要的选择功能(还参见,[10])。
迈克尔森对比度计算为,其是在一个7×7的平均亮度中心像素的周围区域以及是图像的整体平均亮度。
也用在我们的研究中被使用。
, 离散余弦变换,离散余弦变换,被用在几种编码标准,例如,在JPEG-DCT压缩算法(参见第8)。
图像首先被细分为正方形的块(即8×8象素);然后使用DCT系数将每块被变换到一个新的组;最后,只有高频系数被保留在量化的相应块中。
,高斯的拉普拉斯变换,被卷积的图像(参照图2进行比较用的算法')。
3.2 算法的生物学原理我们试图收集广泛的各种算法集合(我们会在这篇论文中学习10个算法研究)。
它们中的一些不符合人的视觉和视觉神经生理学的直觉或部分经验性的概念,但聚集远播。
然后,我们让我们的实验中选择此广泛收集算法,当面临着寻找aROIs的任务,坚持以类似的标识hROIs的是我们发现的人类受试者他们的眼球运动注视所示的这(见下节)。
我们能不能够看一下成功的预测算法,并决定关于人类大脑如何控制我们的愿景重要的真理?从某种意义上说,我们能做到。
正如我们所说的,似乎几个算法担任我们可能直觉,观察中心环绕结构,具有高局部对比度,寻找对称的特点,或与高密度的边缘地区。
这适用于普通图像和场景。
当然,人的视觉大脑是非常灵活的,并且对于特定的一组照片,并针对特定的任务,并确实与训练有素检查员,相当不明显的内核可能被利用来很大的好处。
我们怀疑脑,具有巨大的自上而下的方法,有以合成图像处理算法远远超出那些已被并入(通过进化),该进入视网膜和早期视觉皮层处理的自下而上机制的能力(其中,唉,一直是那些研究最多的视力神经生理学家)。
换句话说,即使是那些不具有直观明了的生物学合理性可能会成功地预测眼睛注视算法。
这就是为什么我们说,我们不希望选择我们的算法先验:只有后天的,比如,与人类的数据比较后,我们终于可以识别,选择,最好的匹配算法。
我们的方法,在一般情况下,让我们来研究这些人造投资促进机构,然后为我们提供了更多的机会对一个特定的成功IPA基于人体实验的精神成果显着,形成新的假设。
4 聚类和测序在一般情况下,在三秒钟的眼球运动的实验中,大约有7至11的录制品。