用c++对感兴趣区域的提取
形状标记图和Gabor小波的交通标志识别

i in sta so me n o v r u r n ai n n c l v l ti g sb he Ga o v lt n he man f a tc sg swa r n fr d i t a o so e tto sa d s a ewa ee ma e y t b rwa e e ,a d t i e . i i
Tr f c sg e o n to a e n s a e sg a u e a d Ga o v lt a i i n r c g ii n b s d o h p i n t r n b r wa e e s
GU i g i M n q n,CAIZii g,HE Fe f n xn ne
p r vco ahn a p l dt jdetet e frfcs n .E p r etleu s hw ta t rp sda o ot et m c ie sapi g p a i i s x e m na rsl o th po oe l - r w e ou h y o t f g i ts h e g
i e db rhlg a i aepo es .2)T es n t eo erg no trs R I a xrc da ft e ymop ooi l m g rcsig lr c n h i a r ft ei f neet( o )w set t sa g u h o i ae
foc算法原理
foc算法原理
在计算机视觉和图像处理中,FOC(Focus of Attention)算法是一种用于确定图像中感兴趣区域的算法。
FOC算法旨在模拟人眼对视觉场景的关注点,以便集中处理和分析最相关的信息。
以下是FOC算法的一般原理:
1. 图像特征提取:FOC算法首先对图像进行特征提取,以识别可能的感兴趣区域。
这些特征可能包括颜色、纹理、边缘等。
2. 区域分割:基于提取到的图像特征,算法会对图像进行区域分割,将图像划分为不同的区域。
这些区域代表了图像中具有相似特征的部分。
3. 关注度计算:对每个区域进行关注度计算,以确定该区域在整个图像中的重要性。
关注度计算可以根据不同的规则和算法进行,其中可能包括颜色强度、纹理对比度、边缘密度等因素。
4. 生成关注图:将计算得到的关注度映射到原始图像上,生成关注图。
在关注图中,亮度或颜色较高的区域表示在FOC算法中被认为是重要的区域。
5. 感兴趣区域提取:基于生成的关注图,FOC算法确定最终的感兴趣区域,这些区域在图像分析或处理中可能会受到重点关注。
FOC算法的实现可以采用各种技术和方法,包括机器学习、模型训练、图像处理等。
这使得FOC算法能够根据特定的应用场景和需求进行调整和优化。
总体而言,FOC算法的目标是通过模拟人眼的注意机制,自动确定图像中最引人注目的区域,从而提高计算效率和系统性能。
智能制造中的机器视觉检测技术考核试卷
A.使用稳定的硬件平台
B.优化算法减少计算时间
C.环境控制减少光照变化
D.定期维护和校准设备
17.在机器视觉中,以下哪些技术可用于动态场景的检测?()
A.高速摄像
B.连续自动对焦
C.运动估计和补偿
D.静态图像处理
18.以下哪些是机器视觉系统中的图像处理步骤?()
1.机器视觉检测技术只能应用于静态场景的检测。()
2.在机器视觉系统中,光源的选择对图像质量没有影响。()
3.深度学习模型在机器视觉中可以替代传统的人工特征提取方法。()
4.机器视觉检测系统中,镜头的畸变可以通过软件校正完全消除。()
5.机器视觉系统中的图像传感器分辨率越高,检测速度越快。()
6.在机器视觉中,使用结构光技术可以实现高精度的三维测量。()
()
标准答案
一、单项选择题
1. C
2. C
3. C
4. B
5. C
6. D
7. D
8. D
9. D
10. C
11. B
12. D
13. A
14. D
15. D
16. D
17. C
18. A
19. C
20. C
二、多选题
1. ABCD
2. ABC
3. ABCD
4. ABCD
5. ABC
6. ABC
7. ABCD
()
2.描述深度学习在机器视觉检测中的具体应用,并分析其相较于传统图像处理技术的优势。
()
3.论述机器视觉系统在设计和实施过程中需要考虑的主要因素,以及这些因素如何影响系统的性能。
晶圆缺陷检测原理

晶圆缺陷检测原理晶圆缺陷检测(Wafer defect inspection)是半导体制造过程中不可或缺的一环。
它是将一个晶圆上的所有芯片边缘和表面进行精细扫描,寻找潜在或已存在的缺陷,以便于制造商确定晶圆是否合格,以及确定是否需要进行后续操作或废弃。
晶圆缺陷可能来源于很多方面,例如:在晶圆制造的各个环节中出现了污染或机器设备故障,或者手动处理等过程中人为因素造成的人为因素。
因此,精确检测是否存在缺陷非常重要。
晶圆缺陷检测的原理是基于模式比较。
其过程往往采用多种技术,包括光学、实际测量、声学等。
这些技术可以分类为两类:一种是基于表面的,另外一种是基于体积的。
基于表面的方法可以检测晶圆上的缺陷,而基于体积的技术则可以检测晶圆内部的缺陷。
下面我们对晶圆缺陷检测的原理进行更详细的解释。
基于表面缺陷的检测方法通常,晶圆缺陷检测主要采用光学技术。
它使用各种光源和摄像机,通过照明和影像来检测晶圆上的表面缺陷。
这些缺陷可能包括瑕疵、污染、芯片的附加元件、沟槽、斑点等。
这些缺陷有时会很微小,甚至小于芯片的尺寸,必须进行高精度的检测。
1. 感兴趣区域(ROI)选择在进行检测的时候,晶圆通常会被分成很多区域。
每个感兴趣的区域需要被设计出来。
这些区域通常包括芯片区域和其他的一些区域。
2. 检测器矫正通常,使用的检测器都要经过矫正,以获得准确的信号和像素计数。
在使用检测器之前,通常需要进行检测器的矮化(噪声降低)、平坦化和校正。
3. 图像分析图像分析,是晶圆缺陷检测的关键环节。
在这一步骤中,应该尽可能利用图像处理算法,提取出各个区域内的缺陷。
这些算法通常包括过滤器、数字卷积、边界检测器等。
检测到的缺陷通常被标记为无用、可疑、或是警告。
对于基于体积缺陷的检测方法,常常使用的技术是透射率和声波技术。
1. 透射率该方法通过测量透射率和反射率,使将被测试的物体放在光源旁边,并检测透射率和反射率,从而检测物体的厚度、密度和构造状况。
用VC编程实现BMP图像裁切

5.5 用VC编程实现BMP图像裁切随着计算电子技术和计算机技术的发展,数字图像处理进入高速发展时期,许多成熟的图像处理软件如雨后春笋般层出不穷。
在大多数图像处理软件中都有图像裁切功能,用它能够快速提取感兴趣区域,去掉多余的图像内容。
那么怎样编程实现图像裁切呢,下面以BMP图像为例介绍一下如何用VC实现图像裁切。
先介绍第一种方法,将图像数据全部读入内存,然后将感兴趣区域裁切下来。
在许多数字图像处理的书中都有关于BMP图像存储结构的章节,这里就不再详细介绍了。
BMP文件一般分为四个部分:位图头文件、位图信息头、调色板和图像数据。
图像裁切要用到位图信息头中的几个参数值:biWidth(图像宽度)、biHeight(图像高度)、biBitCount(每个像素的位数)、biSizeImage(图像长度)。
图像裁切首先要确定裁切区域内每个像素在整幅图像中的位置,我们以裁切区域中心点像素位置起算,要注意的是图像数据的存储是从最下面一行的左边开始的。
如下图,Height是图像高,Width是图像宽,ctPoint是裁切区域中心点坐标,dwX和dwY分别是裁切区域的宽和高。
以256色图像为例(每个像素占一个字节),裁切区域左下角像素(也就是裁切后图像的第一个像素)位置为(Height-ctPoint.y-dwY/2-1)×Width+ctPoint.x-dwX/2,左下角像素位置确定了,裁切区域内的其他像素位置就很容易确定。
确定了裁切区域内每个像素的位置后,就可以把这些像素的值赋给裁切后图像的相应像素。
裁切后图像的位图信息头和调色板只要从原图像数据中拷贝就可以了,修改信息头中图像宽、高和长度值为裁切后的值。
按照上面的思路笔者用VC++ 6.0编写了一个图像裁切函数ClipDIB(),该函数首先计算裁切区域图像数据的大小,为裁切后的图像分配内存,然后将原图像的信息头、调色板拷贝给裁切后的图像,最后将原图像中裁切区域内的像素值赋给裁切后影像。
基于感兴趣区域和FCM的图像检索算法
粥
如 存 j使 d:则 := 对≠u 0 果 在r 得 o 令u l i,= , , , :且 r 。 ¨
() 下述公式 计算V ’ 3用 :
,
取 ,因此 合理选取 初始 类 中心 是聚类 算法 中最 重要 的 步 。本 文采用 了一 种 自适 应 的初 始聚类 中心 选取 方
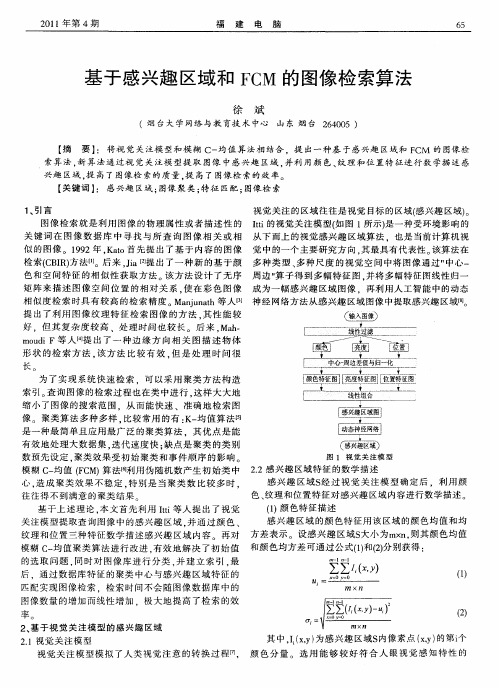
感兴 趣 区域 的 颜 色特 征用 该区域 的颜 色均值 和均 方差 表示 。设 感 兴趣 区域S 大小 为m× , 其颜 色均 值 n则 纹理 和位 置三种 特 征数学 描 述感 兴趣 区域 内容 再对 1和( ) 模糊 C 均 值 聚类 算法 进行 改进 . 一 有效 地 解 决 了初 始值 和颜色 均方差 可通 过公 式() 2分别获 得 : 的选取 问题 , 时对 图像 库 进 行分 类 , 建 立 索 引 , 同 并 最 后 .通过 数 据库特 征 的聚类 中心与感 兴 趣 区域 特 征 的
21视觉关 注模型 .
其 中, x ) I , 为感 兴 趣 区域S ; Y 内像素 点 x ) , 的第i y 个
视 觉 关注 模 型模 拟 了 人类 视觉 注 意 的转 换 过 程[ 颜 色 分 量 。选 用 能 够 较 好 符 合 人 眼 视觉 感 知 特 性 的 7 1 ,
6 6
图 1 视 觉 关 注 模 型
. 模 糊 C 均值 (C 算法 『 一 F M) 句 利用 伪 随机数 产 生初 始 类 中 22感 兴趣 区域 特征 的数 学描 述 感 兴 趣 区域 S 过 视 觉 关 注模 型确 定 后 .利 用 颜 经 心 , 成 聚类 效 果 不稳 定 . 造 特别 是 当 聚类 数 比较 多 时 . 色、 纹理 和位置 特征对 感 兴趣 区域 内容进行数 学描述 。 往 往 得 不 到 满 意 的 聚 类 结 果 基 于上 述理 论 . 本文 首 先利用 Ii t 等人 提 出 了 视觉 t 关注模 型 提取查 询 图像 中 的感兴趣 区域 , 并通 过 颜 色 、 f1 色特 征描 述 1颜
CT旋转中心的精确确定方法

预备知识
预备知识
CT成像的基本原理是利用X射线穿透人体组织,不同组织对X射线的吸收程度 不同,导致探测器接收到的信号强度有所改变。通过对这些信号进行处理和计算, 可以重建出人体内部的二维图像。为了获得完整的三维图像,需要围绕人体旋转 CT设备,并从多个角度采集数据。
方法与步骤
1、选择合适的定位方法
基于特征定位的方法则是通过提取图像中的特征来确定旋转中心。这些特征 可以是病变区域、器官或特定的骨骼结构等。医生可以通过手动或自动的方式提 取这些特征,并计算出旋转中心的位置。
2、提取感兴趣区域
2、提取感兴趣区域
确定CT旋转中心需要先提取感兴趣区域,即需要进行定位的特定区域。这个 区域可以是病变区域或感兴趣的器官。为了提取感兴趣区域,医生需要先对原始 图像进行预处理,如去噪、平滑等,以突出显示目标区域。然后,医生可以利用 图像处理技术(如边缘检测、阈值分割等)来提取感兴趣区域。
3、确定CT旋转中心
3、确定CT旋转中心
提取到感兴趣区域后,医生需要根据该区域的特征来计算CT旋转中心的位置。 通常情况下,旋转中心被定义为感兴趣区域的重心或形心。医生可以通过以下步 骤来确定旋转中心形心, 确定旋转中心的位置
2、根据计算得到的质心或形心,确定旋转中心的位置
一、背景与问题
一、背景与问题
工业CT系统是一种用于检测物体内部结构及物理特性的无损检测技术。该技 术利用X射线源和探测器对物体进行多角度的扫描,并通过计算机断层扫描技术 重建物体内部的3D结构。然而,准确地确定转台的旋转中心是一个重要的问题。 如果旋转中心的位置不准确,那么重建的3D结构可能会出现偏差,影响检测结果 的准确性。
内容摘要
接下来,利用计算机视觉中的模板匹配技术,将这些特征与预先定义的模板 进行匹配,以确定旋转中心的位置。通过不断调整模板的位置和大小,直到找到 最佳匹配的位置,即可以确定出旋转中心。
C语言实现opencv提取直线、轮廓及ROI实例详解

C语⾔实现opencv提取直线、轮廓及ROI实例详解⼀、Canny检测轮廓在上⼀篇⽂章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果⼀致,⽽soble边缘检测是基于单⼀阈值的,我们不能兼顾到低阈值的丰富边缘和⾼阈值时的边缘缺失这两个问题。
⽽canny算⼦则很好的弥补了这⼀不⾜,从⽬前看来,canny边缘检测在做图像轮廓提取⽅⾯是最优秀的边缘检测算法。
canny边缘检测采⽤双阈值值法,⾼阈值⽤来检测图像中重要的、显著的线条、轮廓等,⽽低阈值⽤来保证不丢失细节部分,低阈值检测出来的边缘更丰富,但是很多边缘并不是我们关⼼的。
最后采⽤⼀种查找算法,将低阈值中与⾼阈值的边缘有重叠的线条保留,其他的线条都删除。
本篇⽂章中不对canny的算法原理作进⼀步说明,稍后会在图像处理算法相关的⽂章中详细介绍。
下⾯我们⽤OpenCV中的Canny函数来检测图像边缘int main(){Mat I=imread("../cat.png");cvtColor(I,I,CV_BGR2GRAY);Mat contours;Canny(I,contours,125,350);threshold(contours,contours,128,255,THRESH_BINARY);namedWindow("Canny");imshow("Canny",contours);waitKey();return 0;}显⽰效果如下:⼆、直线检测⽤到的是霍夫变换检测直线的算法直线在图像中出现的频率⾮常之⾼,⽽直线作为图像的特征对于基本内容的图像分析有着很重要的作⽤,本⽂通过OpenCV中的hough变换来检测图像中的线条。
我们先看最基本的Hough变换函数HoughLines,它的原型如下:void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 );它的输⼊是⼀个⼆值的轮廓图像,往往是边缘检测得到的结果图像;它的输出是⼀个包含多个Vec2f点的数组,数组中的每个元素是⼀个⼆元浮点数据对<rou,theta>,rou代表直线离坐标原点的距离,theta代表⾓度。
一种基于感兴趣区域的红外目标提取方法
第35卷,增刊红外与激光工程2006年10月、,b1.35Sup pl eI r l ent I nf t a砌and La se r Engi nee血g0ct.2()06一种基于感兴趣区域的红外目标提取方法赵钦佩,姚莉秀,何虎翼,杨杰(上海交通大学图像处理与模式识别研究所,上海200240)摘要:针对复杂背景下的红外图像的小目标提取问题,提出了一种新的红外图像自动分割方法。
为了更好地控制计算复杂性及目标提取的准确性,本方法建立在通过自适应But t en)l,or t l l高通滤波器找到的感兴趣区域之上并充分地利用了该区域中背景信息比较简单、目标易被分割的特性。
同时,考虑到像素灰度是红处图像区分目标与背景的重要因素,而像素间的相邻度则能较好的防止虚警的产生,结合像素的灰度和相邻度的综合关系提出了一种新的分割原则。
实验证明,新算法取得了很好的效果。
关键词:红外图像;感兴趣区域;目标提取;相邻度中图分类号:1'P391文献标识码:A文章编号:1007.2276(2006)增D.026禾04TI ar get ext r ac t i on m et hod based on r e西on of i nt er estZ H A O Q i n pei,Y A o L i-xi u,H E H u-yi,Ⅵ蝌G Ji e(hI譬dnl位of I II lage pI D ccss i ng衄d Pan咖&删曲n’shan曲【ai Ji∞£oⅡg uni ve侣i劬Shanghai,2002加,al i na)A bst腿c t:I n t em s of m e i m por t加ce ofⅡl e m eⅡl o d o n t a唱e t e x仃a c t i on i n i n行眦d i m ages,A new ki nd of aut om at i c segm en伽on nl e m od i s pr es ent ed.I n or d er t o r educe t l le cornpu t at i o n c o s t aI l d e x仃a ct t al唱et ac cura t e l y'Ⅱl is m e m od i s bas ed o n i nt er e st ed r egi on i n w I l i ch ba c蚝round i s m uch s i m pl er al l d t a玛e t i s e asi e r t o be ex仃act ed.111i s i n衄est ed regi on衄D u曲ad印t i V eB u仕e刑onl l m gh-PaSs f i l t er is obt ai ned.A t t I le s锄e t iI ll e’consi d嘶ng吐latpi)【el’s V al ue i s an i n l por t aI l t fa c t or t o di s t i n gui sh t a唱e t and back gr ound,and adj acency is use f ul t o pr eV ent f a l s e al锄s,a noV el segm en雠on m l e i s p1.0pose d w l l i ch t a|∞s f uU u∞of m e r el at i ons hi p bet w een山em.I}】【】per i m朗t alr.esul tS s h ow t t l at it is ef!I-ect i ve.K ey w or ds:hf t ar e d i Ir嘴e;Re垂on0f i I l t ef est;Th玛et e加∽t i on;A dj acencyO引言图像分割是~个经典难题,从20世纪70年代起图像分割问题就吸引了很多研究人员为之付出了巨大的努力,但到目前为止没有一个通用的方法,也不存在一个判断分割是否成功的客观标准。
图像感兴趣区域自动提取算法
图像感兴趣区域自动提取算法摘要:感兴趣区域(Regions of Interest)提取技术在图像处理和分析领域有着重要地位。
提出了一种ROI的自动提取算法。
在显著度图和相对位置指示图的基础上,采用基于子区域的区域生长法,以像素点的显著度、相对位置及颜色纹理信息作为生长条件,颜色、纹理信息的权重可以根据图像的内容自适应调整。
实验结果表明,该方法与现有算法相比在速度和ROI提取的准确性方面均有提高。
关键词:感兴趣区域,显著度图,区域生长Automatic Extraction of Regions of InterestAbstract:The extraction technique of ROI plays an important role in image analysis.In this paper an automatic extraction of ROI algorithm is proposed.Based on the saliency map and relative position map,use the subregion based region grow method,besides the saliency map and relative positions,this paper joined the information of color and texture.The power of color and texture can adjusted by image content automatically.The experiment prove this algorithm is efficient and effective.Key words:Regions of Interest,saliency map,region grow1引言感兴趣区域(Regions of Interest简称ROI)即图像中最能引起用户兴趣,最能表现图像内容的区域,如能提取出这些区域将会大大提高图像处理和分析的效率和准确度。
hic技术原理

hic技术原理
(原创版)
目录
1.HIC 技术的定义
2.HIC 技术的原理
3.HIC 技术的应用
4.HIC 技术的优势与局限性
正文
HIC 技术,全称为 Hybrid Image Computing,即混合图像计算技术,是一种结合了数字图像处理和计算机视觉的技术。
这种技术的主要目的是通过计算机对图像进行处理和分析,从而获取图像中的有用信息。
HIC 技术的原理主要基于数字图像处理技术。
数字图像处理是将物理图像转换为数字信号,然后通过计算机对这些数字信号进行操作和处理,从而达到对图像进行修改、增强、降噪等目的。
在 HIC 技术中,数字图像处理技术被用于提取图像中的特征,例如边缘、纹理等。
HIC 技术的应用领域非常广泛,包括医疗影像分析、机器视觉、遥感图像处理等。
以医疗影像分析为例,HIC 技术可以对医学图像进行预处理,提取出感兴趣区域,然后通过计算机进行进一步的分析,从而为医生提供有用的诊断信息。
HIC 技术的优势在于它能够提高图像的质量和可视化程度,使得图像中的信息更加容易被理解和分析。
同时,HIC 技术也可以提高图像处理的效率,减少人工操作的复杂度。
然而,HIC 技术也存在一些局限性,例如对计算机硬件的要求较高,处理过程中可能存在信息丢失等问题。
第1页共1页。
识别CT图像中感兴趣区域的方法

识别CT图像中感兴趣区域的方法引言CT(Computed Tomography)即计算机断层扫描,是一种通过断层扫描技术获取人体或物体内部结构信息的医学影像学技术。
在医学诊断、疾病治疗等领域,准确地识别和定位感兴趣区域对于提供高质量的医疗服务至关重要。
本文将介绍几种常用的识别CT图像中感兴趣区域的方法,包括阈值分割法、边缘检测法和机器学习方法。
一、阈值分割法阈值分割法是一种简单且常用的图像分割方法,根据像素灰度值与预先设定的阈值之间的关系将图像分为不同的区域。
在识别CT图像中感兴趣区域时,可以先对图像进行灰度预处理,然后根据感兴趣区域的特征选择合适的阈值进行分割。
阈值分割法的基本步骤如下:1. 灰度预处理:将原始CT图像转换为灰度图像,常用的方法包括灰度级缩放、直方图均衡化等。
2. 选择阈值:根据感兴趣区域的特征,选择合适的阈值。
常见的选择方法有全局阈值和局部阈值等。
3. 分割图像:将像素灰度值与阈值进行比较,将图像分为感兴趣区域和背景区域。
阈值分割法的优点是操作简单、计算速度快,适用于处理较为清晰的图像。
然而,由于阈值的选择对分割结果有较大影响,对于噪声较大或者目标区域与背景区域的灰度差异较小的图像,阈值分割法可能无法获得准确的结果。
二、边缘检测法边缘检测法是一种基于图像边缘信息来分割图像的方法。
在CT图像中,感兴趣的区域往往具有明显的边缘特征,因此边缘检测法可以有效地识别出感兴趣区域。
常用的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子等。
这些算子基于图像的梯度信息,能够精确地定位边缘位置。
在边缘检测的过程中,可以通过调整算子的参数来优化边缘检测结果。
边缘检测法的优点是能够获得较为准确的边缘信息,适用于处理边缘清晰的图像。
然而,边缘检测法在处理噪声较多的图像时可能会引入多余的边缘或者错漏的边缘,导致分割结果不准确。
三、机器学习方法机器学习方法在图像分割中得到广泛应用,通过自动学习感兴趣区域的特征模型,可以对CT图像中的感兴趣区域进行准确的识别。
roi提取方法

roi提取方法ROI (Region of Interest),即感兴趣区域,在图像处理中指定区域内的特定对象或目标,包括对象的轮廓、边缘和纹理等特征。
ROI提取方法因应用场景和需求不同而有所区别,以下列举几种常见的ROI提取方法。
1. 阈值分割法阈值分割法是指将图像分成相应的对象和背景两部分。
根据阈值分割法,将灰度值小于某个固定值的像素灰色预设为1,将灰度值大于某个固定值的像素灰度预设为0。
灰度值介于这两个固定值之间的像素则根据具体应用情况进行判断。
这样,就能将感兴趣区域中的目标从背景中分离出来,进而提取ROI。
2. 边缘检测法边缘检测法是指在图像中检测出目标对象的轮廓和边缘位置的方法。
常用的边缘检测方法有Sobel算子、Canny算子和Laplacian算子。
这些算子可以在图像中检测出边界,从而提取ROI。
3. 区域生长法区域生长法是指从图像中的某一点开始,逐步生长形成目标对象的一种方法。
该方法需要指定生长的基准点,以及生长的规则。
生长的规则可以是基于像素灰度值相似性、空间接近度等指标来判断像素是否应该被加入到ROI中。
该方法可以在不需要提前知道目标区域形状的情况下,自动生长提取ROI。
4. 基于模板匹配的方法对于某些具有特定形状的目标,可以通过在图像中搜索相应的模板来提取ROI。
该方法需要事先准备好一个与目标形状相匹配的模板,通过在图像中搜索相似区域,可以将目标从背景中提取出来。
总之,ROI提取方法相对较为复杂,需要根据具体需求选择合适的方法。
常用的方法有阈值分割法、边缘检测法、区域生长法和基于模板匹配的方法等。
在实际应用中,需要针对具体情况进行选择和优化。
模糊c均值聚类算法及其应用
模糊c均值聚类算法及其应用模糊C均值聚类算法(Fuzzy C-means clustering algorithm,简称FCM)是一种经典的聚类算法,被广泛应用于图像分割、文本聚类、医学图像处理等领域。
相比于传统的C均值聚类算法,FCM在处理模糊样本分类问题时更为适用。
FCM是一种迭代算法,其基本思想是通过计算每个数据点属于不同类别的隶属度值,然后根据这些隶属度值对数据进行重新划分,直到满足停止条件为止。
算法的核心在于通过引入一种模糊性(fuzziness)来描述每个数据点对聚类中心的隶属关系。
具体而言,FCM算法的步骤如下:1.初始化聚类中心和隶属度矩阵。
随机选择K个聚类中心,并为每个数据点分配初始化的隶属度值。
2.计算每个数据点对每个聚类中心的隶属度值。
根据隶属度矩阵更新每个数据点对每个聚类中心的隶属度值。
3.根据新的隶属度矩阵更新聚类中心。
根据隶属度矩阵重新计算每个聚类中心的位置。
4.重复步骤2和步骤3,直到隶属度矩阵不再发生明显变化或达到预定迭代次数。
FCM算法的主要优点是可以对模糊样本进行有效分类。
在传统的C均值聚类算法中,每个数据点只能被分配到一个聚类,而FCM算法允许数据点对多个聚类中心具有不同程度的隶属度,更适合于数据存在模糊分类的情况。
FCM算法在实际应用中有广泛的应用。
以下是一些典型的应用示例:1.图像分割:FCM算法可以对图像中的像素进行聚类,将相似像素分配到同一聚类,从而实现图像分割。
在医学图像处理中,FCM可用于脑部MR图像的分割,从而帮助医生提取感兴趣区域。
2.文本聚类:FCM算法可以将文本数据按照语义相似性进行聚类,帮助用户高效分析和组织大量的文本信息。
例如,可以使用FCM算法将新闻稿件按照主题进行分类。
3.生物信息学:FCM算法可以对生物学数据进行聚类,如基因表达数据、蛋白质相互作用网络等。
通过使用FCM算法,可以帮助研究人员发现潜在的生物信息,揭示基因和蛋白质之间的关联。
数字图像处理期末考试答案
实用文档数字图像处理期末考试答案数字图像处理》复指南选择题1.在采用幂次变换进行灰度变换时,当幂次取大于1时,该变换是针对哪一类图像进行的?(B)A。
图像整体偏暗B。
图像整体偏亮C。
图像细节淹没在暗背景中D。
图像同时存在过亮和过暗背景2.图像灰度方差说明了图像的哪一个属性?(B)实用文档A。
平均灰度B。
图像对比度C。
图像整体亮度D。
图像细节3.计算机显示器主要采用哪一种彩色模型?(A)A。
RGBB。
CMY或CMYKC。
HSI4.采用模板[-11]T主要检测哪个方向的边缘?(A)A。
水平实用文档B。
45度C。
垂直D。
135度5.下列算法中属于图像锐化处理的是:(C)A。
低通滤波B。
加权平均法C。
XXX滤波D。
中值滤波6.维纳滤波器通常用于哪种情况?(C)实用文档A。
去噪B。
减小图像动态范围C。
复原图像D。
平滑图像7.彩色图像增强时,可以采用哪种处理方法?(C)A。
直方图均衡化B。
同态滤波C。
加权均值滤波D。
中值滤波实用文档8.在对图像进行复原的过程中,B滤波器需要计算哪些功率谱?(B)A。
逆滤波B。
维纳滤波C。
约束最小二乘滤波D。
同态滤波9.XXX滤波后的图像通常较暗,为改善这种情况,可以将高通滤波器的转移函数加上一定的常数以引入一些低频分量。
这样的滤波器称为什么?(B)A。
XXX高通滤波器B。
高频提升滤波器实用文档C。
高频加强滤波器D。
理想高通滤波器10.图像与灰度直方图之间的对应关系是什么?(B)A。
一一对应B。
多对一C。
一对多D。
都不对应11.下列算法中属于图像锐化处理的是:(C)A。
低通滤波B。
加权平均法实用文档C。
XXX滤波D。
中值滤波12.一幅256x256的图像,若灰度级数为16,则存储它所需的比特数是多少?(A)A。
256KB。
512KC。
1MD。
2M13.一幅灰度级均匀分布的图像,其灰度范围在[0,255],则该图像的信息量为多少?(D)实用文档A。
0B。
255C。
6D。
814.下列算法中属于局部处理的是什么?(D)A。
第2章感兴趣区域基本操作
第2章感兴趣区域基本操作实验目的:掌握感兴趣区域的选取方法,为监督分类、图像数字化以及图像子集提取操作奠定基础。
主要内容:(1)感兴趣区域定义(2)感兴趣区域编辑;(2)感兴趣区控制第1节定义感兴趣区(Defining Regions of Interest)感兴趣区(ROIs :Regions of Interest)是选定图像的子集。
这些区域可以呈不规则的形状,通常用来提取分类的统计信息、掩膜,及其它操作。
ENVI 允许选择任意的多边形、点或矢量的组合来作为一个感兴趣区。
可以定义多个感兴趣区,并绘制到主图像、滚动或缩放窗口中的任何一个中。
在主图像窗口中,选择 Tools> Region of Interest,出现Region of Interest Controls 对话框。
1 “I mage”、“S croll” 或“Z oom”切换按钮通过这些按钮之间的切换来控制是否感兴趣区将定义在选择显示的主图像窗口、滚动窗口或缩放窗口内。
选择“Off ”来使感兴趣区选项无效,或通过点击适当的切换按钮来取消选择所需要的窗口。
2 选择感兴趣区类型多边形“P olygon”、折线“Polyline”、点“Point”、矩形“Rectangle”和椭圆和“Ellipse”。
每种类型都有一组不同的鼠标按键任务。
一个区域可以包含这五种感兴趣区类型的任意组合。
3 擦除(Erase)如果一种感兴趣区选择了多个区域,某些区域要擦除,则先点击“Goto (转到)”按钮,转到相应的区域。
然后点击“Delete Part(删除部分)”按钮。
4 新区域(New Region)由感兴趣区类型的任意组合构成的多个区域,可以被包含在一个感兴趣区中。
要启动一个新的感兴趣区,在 Region of Interest Controls 对话框内,点击“New Region”,一个新名将出现在“Available Regions ofInterest”列表中。
1+x影像处理技术题库
1+x影像处理技术题库1. 以下属于现行PACS系统特性的是 [单选题] *A、开放性B、可连接性C、可扩展性D、以上都是(正确答案)2. 一幅黑白图像的像素值可用 [单选题] *A、2的6次方表示B、0,1表示(正确答案)C、0-255的灰度变化表示D、0-250的灰度变化表示3. 以下对现行PACS系统的描述中错误的是 [单选题] *A、采用大容量磁盘存储,克服了胶片存档占用空间大、检索困难的问题B、充分利用计算机技术,通过图像增强、多模式显示等功能提高诊断能力C、针对特定型号CT、MR设备采用定制化解决方案,形成科室内影像数字化(正确答案)D、网络技术支持多用户同时处理,并对同一患者的所有相关数据整理归档4. 下列算法中属于局部处理的是 [单选题] *A、灰度线性变换B、二值化C、傅立叶变换D、中值滤波(正确答案)5. DICOM信息模型中,图像信息分为四个层次,其中不包括 [单选题] *A、患者层次B、检查层次C、设备层次(正确答案)D、序列层次6. 图像灰度直方图说明了图像的哪一个属性 [单选题] *A、具有某灰度值像素的个数(正确答案)B、平均灰度C、图像对比度D、图像细节7. 图像与灰度直方图之间的对应关系是 [单选题] *A、一一对应B、多对一(正确答案)C、一对多D、都不8. 医学影像处理技术是指对已经获得的图像作进一步的处理,如对其进行 [单选题] *A、分析B、识别C、分割D、以上都是(正确答案)9. 数字图像的直方图表示 [单选题] *A、每个灰度级出现的概率关系图(正确答案)B、每幅图像像素分布C、图像的几何位置D、图像的灰度级10. 下列算法中属于点处理的是 [单选题] *A、梯度锐化B、二值化(正确答案)C、傅立叶变换D、中值滤波11. 数字图像是指把模拟图像分解成被称作像素的若干小离散点,并将各像素的颜色值用量化的离散值,即整数值来表示的图像。
因此,又将数字图像称作 [单选题] *A、离散图像(正确答案)B、模拟图像C、虚拟图像D、分割图像12. 采样指将空域上或时域上连续的图像(模拟图像)变换成离散采样点(像素)集合的一种操作。
opencvsharp区域提取
opencvsharp区域提取摘要:1.OpenCVSharp 简介2.区域提取的概念和方法3.OpenCVSharp 中的区域提取示例正文:【1.OpenCVSharp 简介】OpenCVSharp是一款基于OpenCV的C#库,用于在Windows平台上进行计算机视觉和机器学习相关操作。
它提供了丰富的图像处理和分析功能,使得开发人员可以轻松地使用C#编写高性能的计算机视觉应用程序。
【2.区域提取的概念和方法】区域提取是计算机视觉中的一种常见操作,指的是从图像中提取感兴趣区域,以便进行进一步的处理和分析。
区域提取的方法有很多,常见的有以下几种:1) 基于像素阈值的方法:通过设置一个阈值,将图像中的像素分为两个或多个区域。
2) 基于区域的生长和合并方法:从一个或多个种子区域开始,通过生长和合并操作,逐渐形成感兴趣区域。
3) 基于边缘检测的方法:通过检测图像中的边缘,将边缘相连的区域作为感兴趣区域。
4) 基于聚类的方法:将图像中的像素分为若干个簇,每个簇内的像素具有相似的属性,从而形成感兴趣区域。
【3.OpenCVSharp 中的区域提取示例】以下示例展示了如何使用OpenCVSharp 进行基于像素阈值的区域提取:```csharpusing System;using OpenCvSharp;class Program{static void Main(string[] args){// 读取图像Mat img = new Mat();img = Images.Load("image.jpg");// 将图像转换为灰度图Mat gray = new Mat();cvtColor(img, gray, ColorConversion.BGR2GRAY);// 设置阈值Scalar threshold = new Scalar(128, 128, 128);Mat thresholded = new Mat();threshold(gray, thresholded, threshold);// 获取阈值以上的区域Mat region = new Mat();thresholded.CopyTo(region, fromMask: new Bgr, toMask: new Bgr);// 显示结果region.Show();// 等待按键,然后退出Console.WaitKey(0);}}```上述代码首先读取一张图片,将其转换为灰度图,然后设置一个阈值,将灰度图分为两个区域。
一种基于胸部CT图像感兴趣区域提取的检索技术

一种基于胸部CT图像感兴趣区域提取的检索技术
陈琴;邰晓英
【期刊名称】《宁波大学学报(理工版)》
【年(卷),期】2009(022)003
【摘要】探索高效的医学图像检索技术,可以方便医务人员快速高效地查找相似的图像.针对胸部CT图像,提出一种采用改进的区域生长法提取感兴趣区域,在此基础上再提取纹理特征作为图像的特征向量,并以特征向量作为图像检索的依据来进行检索.实验结果表明:在有效提取出病灶区域之余,针对该区域提取图像特征起到了良好的检索效果.将此方法应用于医学图像检索系统可有助于提高医生的诊断效率.【总页数】5页(P354-358)
【作者】陈琴;邰晓英
【作者单位】宁波大学,信息科学与工程学院,浙江,宁波,315211;宁波大学,信息科学与工程学院,浙江,宁波,315211
【正文语种】中文
【中图分类】TP391.
【相关文献】
1.胸部CT图像中感兴趣区域的提取与量化分析 [J], 陈坚;郭圣文;吴效明
2.CT图像感兴趣区域提取及参数测定 [J], 谭永强
3.一种基于感兴趣区域的图像情感特征提取方法 [J], 刘澍泽;张巍
4.一种基于感兴趣区域提取的医学图像检索技术 [J], 王李冬;邰晓英;巴特尔
5.模糊C均值聚类算法在肺部CT图像感兴趣区域特征提取中的临床应用研究 [J], 古新展;陈文天;战跃福
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一. 设计目的和意义通过设计,较全面地掌握各种图像提取算法的基本理论、原理和实现手段,并能分析感兴趣区域(ROI)提取效果及对进一步处理的影响,使学生具有一定综合分析问题和解决问题的能力。
二.设计内容和要求原始数据:所获取二值图像。
技术要求:(1)完成题目所要求技术:全面掌握与区域提取算法相关的基本理论、原理和实现手段;(2)通过仿真(实验)验证,编程实现对处理实景图像进行感兴趣区域提取的算法和实现手段,并进行结果分析。
设计要求:课程设计的目的在于培养学生的综合素质,要求学生做到:(1)根据题目要求查阅有关资料,确定方案,写出设计方案;(2)根据对选题的理解,消化查阅资料,给出相关的实现算法和理论根据;(3) 在Matlab或C++或VC环境下,实现算法,并给出仿真结果;(4) 对结果进行分析总结三.设计工作任务每个成员单独用一种方法,在Matlab或VC环境下运行程序,达到对图像感兴趣区域的提取的目的。
四.每种特征提取的代码和运行结果1 通过腐蚀实现轮廓提取(1)程序代码// DibImage.cpp: implementation of the CDibImage class.// DIB(Independent Bitmap) 函数://// PaintDIB() - 绘制DIB对象// CreateDIBPalette() - 创建DIB对象调色板// FindDIBBits() - 返回DIB图像象素起始位置// DIBWidth() - 返回DIB宽度// DIBHeight() - 返回DIB高度// PaletteSize() - 返回DIB调色板大小// DIBNumColors() - 计算DIB调色板颜色数目// CopyHandle() - 拷贝内存块//// SaveDIB() - 将DIB保存到指定文件中// ReadDIBFile() - 重指定文件中读取DIB对象//////////////////////////////////////////////////////////////////////#include "stdafx.h"#include "TemplateTrans.h"#include "DibImage.h"#include "math.h"#ifdef _DEBUG#undef THIS_FILEstatic char THIS_FILE[]=__FILE__;#define new DEBUG_NEW#endif//////////////////////////////////////////////////////////////////////// Construction/Destruction////////////////////////////////////////////////////////////////////// CDibImage::CDibImage(){}CDibImage::~CDibImage(){}//////////////////////////////////////////////////////////////////////// function////////////////////////////////////////////////////////////////////// BOOL CDibImage::Enhance(LPSTR lpDIBBits,LONG lWidth,LONG lHeight) {//边缘检测LPSTR lpSrc;LPSTR lpDst;LPSTR lpNewDIBBits;HLOCAL hNewDIBBits;long i,j;unsigned char n,e,s,w,ne,se,nw,sw;unsigned char pixel;hNewDIBBits=LocalAlloc(LHND,lWidth*lHeight);if(hNewDIBBits==NULL){return FALSE;}lpNewDIBBits=(char *)LocalLock(hNewDIBBits);lpDst=(char *)lpNewDIBBits;memset(lpDst,(BYTE)255,lWidth*lHeight);for(j=1;j<lHeight-1;j++){for(i=1;i<lWidth-1;i++){lpSrc=(char*)lpDIBBits+lWidth*j+i;lpDst=(char*)lpNewDIBBits+lWidth*j+i;pixel=(unsigned char)*lpSrc;if(pixel!=255&&pixel!=0)return FALSE;if(pixel==0){*lpDst=(unsigned char)0;nw=(unsigned char)*(lpSrc+lWidth-1);n=(unsigned char)*(lpSrc+lWidth);ne=(unsigned char)*(lpSrc+lWidth+1);w=(unsigned char)*(lpSrc-1);e=(unsigned char)*(lpSrc+1);sw=(unsigned char)*(lpSrc-lWidth-1);s=(unsigned char)*(lpSrc-lWidth);se=(unsigned char)*(lpSrc-lWidth+1);if(nw+n+ne+w+e+sw+s+se==0){*lpDst=(unsigned char)255;}} } }memcpy(lpDIBBits,lpNewDIBBits,lWidth*lHeight);LocalUnlock(hNewDIBBits);LocalFree(hNewDIBBits);return TRUE; }(2)运行结果源图像处理后的图像2自定义FCm函数对图片进行提取(1)程序代码data=imread('cameraman.tif'); %读入图片的像素矩阵 %data=ima();data=double(data);data=data/1000.0;%由于函数的需要,需将data矩阵中的数值转换格式,否则出错figure,imshow(data)%显示原始图片title ('原始图像')%将图片的像素矩阵转换为样本矩阵,该样本矩阵有65536行(把每个像素点作为一个样本% ,65536个样本值);%有1列(把像素点的灰度值作为样本的特征值)A=zeros(65536,1);%初始化A,为其分配空间A(1:65536)=data(1:65536);%将256*256的矩阵转化成为65536*1的矩阵data=A;% 转换结束后得到样本矩阵cluster_n=2;%标量,表示聚合中心数目,即类别数options=[2;257;1e-5;1]%初始化操作参数y=FCMClust(data, cluster_n, options)%调用模糊C子函数 FCMClust.m子程序1:% FCMClust.m 采用模糊C均值对数据集data聚为cluster_n类function [center, U, obj_fcn] = FCMClust(data, cluster_n, options) % 用法:% 1、[center,U,obj_fcn] = FCMClust(Data,N_cluster,options);% 2、 [center,U,obj_fcn] = FCMClust(Data,N_cluster);% 输入:% data ---- nxm矩阵,表示n个样本,每个样本具有m维特征值% N_cluster ---- 标量,表示聚合中心数目,即类别数% options ---- 4x1矩阵,其中% options(1): 隶属度矩阵U的指数,>1 (缺省值: 2.0)% options(2): 最大迭代次数 (缺省值: 100)% options(3): 隶属度最小变化量,迭代终止条件 (缺省值: 1e-5)% options(4): 每次迭代是否输出信息标志 (缺省值: 1)% 输出:% center ---- 聚类中心% U ---- 隶属度矩阵% obj_fcn ---- 目标函数值if nargin ~= 2 & nargin ~= 3, %判断输入参数个数只能是2个或3个error('Too many or too few input arguments!');enddata_n = size(data, 1); % 求出data的第一维(rows)数,即样本个数in_n = size(data, 2); % 求出data的第二维(columns)数,即特征值长度% 默认操作参数default_options = [2; % 隶属度矩阵U的指数257; % 最大迭代次数1e-5; % 隶属度最小变化量,迭代终止条件1]; % 每次迭代是否输出信息标志if nargin == 2,options = default_options;else%分析有options做参数时候的情况% 如果输入参数个数是二那么就调用默认的option;if length(options) < 4, %如果用户给的opition数少于4个那么其他用默认值; tmp = default_options;tmp(1:length(options)) = options;options = tmp;end% 返回options中是数的值为0(如NaN),不是数时为1nan_index = find(isnan(options)==1);%将denfault_options中对应位置的参数赋值给options中不是数的位置.options(nan_index) = default_options(nan_index);if options(1) <= 1, %如果模糊矩阵的指数小于等于1error('The exponent should be greater than 1!');endend%将options 中的分量分别赋值给四个变量;expo = options(1); % 隶属度矩阵U的指数max_iter = options(2); % 最大迭代次数min_impro = options(3); % 隶属度最小变化量,迭代终止条件display = options(4); % 每次迭代是否输出信息标志obj_fcn = zeros(max_iter, 1); % 初始化输出参数obj_fcn ,将其初始化为max_iter 行矩阵U = initfcm(cluster_n, data_n); % 初始化模糊分配矩阵即隶属矩阵,使U满足列上相加为1% Main loop 主要循环for i = 1:max_iter,%在第k步循环中改变聚类中心ceneter,和分配函数U的隶属度值;[U, center, obj_fcn(i)] = stepfcm(data, U, cluster_n, expo);if display,fprintf('FCM:Iteration count = %d, obj. fcn = %f\n', i, obj_fcn(i));end% 终止条件判别if i > 1,if abs(obj_fcn(i) - obj_fcn(i-1)) < min_impro,break;end,endenditer_n = i; % 实际迭代次数obj_fcn(iter_n+1:max_iter) = [];center;%显示最后的C值矩阵U;%显示最后的隶属度矩阵%通过隶属度矩阵和聚类中心实现图像的二值化,首先将图像的样本点的特征值聚类成两类for i=1:65536if (U(1,i)>U(2,i))data(i)=center(1);elsedata(i)=center(2);endend%恢复图像的像素矩阵---即由二值化后的样本矩阵回归像素矩阵b=zeros(256,256);b(1:65536)=data(1:65536);data=b;figure,imshow(data)%显示模糊C均值处理后的二值化图像title ('模糊C均值后的二值化图像')子程序2:% 子函数function U = initfcm(cluster_n, data_n)% 初始化fcm的隶属度函数矩阵% 输入:% cluster_n ---- 聚类中心个数% data_n ---- 样本点数% 输出:% U ---- 初始化的隶属度矩阵U = rand(cluster_n, data_n); %产生一个cluster_n*data_n的矩阵,其产生0-1之间的随机数col_sum = sum(U);% 返回包含A各列元素之和的一行,data_n列矩阵U = U./(ones(cluster_n,1)*col_sum);;%U点除以sum(U)为行向量的%cluster-n行矩阵以实现每列的元素之和为1即对其进行归一化处理子程序3:% 子函数function [U_new, center, obj_fcn] = stepfcm(data, U, cluster_n, expo)% 模糊C均值聚类时迭代的一步% 输入:% data ---- nxm矩阵,表示n个样本,每个样本具有m的维特征值% U ---- 隶属度矩阵% cluster_n ---- 标量,表示聚合中心数目,即类别数% expo ---- 隶属度矩阵U的指数% 输出:% U_new ---- 迭代计算出的新的隶属度矩阵% center ---- 迭代计算出的新的聚类中心% obj_fcn ---- 目标函数值mf = U.^expo; % 隶属度矩阵进行指数运算结果center = mf*data./((ones(size(data, 2), 1)*sum(mf'))') ;% 新聚类中心dist = distfcm(center, data); % 计算距离矩阵obj_fcn = sum(sum((dist.^2).*mf)); % 计算目标函数值tmp = dist.^(-2/(expo-1));U_new = tmp./(ones(cluster_n, 1)*sum(tmp)); % 计算新的隶属度矩阵子程序4:% 子函数function out = distfcm(center, data)% 计算样本点距离聚类中心的距离% 输入:% center ---- 聚类中心% data ---- 样本点% 输出:% out ---- 距离out = zeros(size(center, 1), size(data, 1));for k = 1:size(center, 1), % 对每一个聚类中心% 每一次循环求得所有样本点到一个聚类中心的距离out(k, :)=sqrt(sum(((data-ones(size(data,1),1)*center(k,:)).^2)',1)); end(2)运行结果源图像处理后的图像3通过调用FCM函数,采用模糊C均值处理对图像进行提取(1)程序代码data=imread('1.jpg'); %读入图片像素矩阵 %data=ima();data=double(data);data=data/1000.0; %由于函数的需要,需将data矩阵中的数值转换格式,否则出错figure,imshow(data)%显示原始图片title ('原始图像')%将图片的像素矩阵转换为样本矩阵,该样本矩阵有19600行(把每个像素点作为一个样本% ,19600个样本值);%有1列(把像素点的灰度值作为样本的特征值)A=zeros(19600,1);%初始化A,为其分配空间A(1:19600)=data(1:19600);%将140*140的矩阵转化成为19600*1的矩阵data=A;% 转换结束后得到样本矩阵[center,U,obj_fcn]=fcm(data,2);%调用fcm函数center;%显示最后的C值矩阵U;%显示最后的隶属度矩阵%通过隶属度矩阵和聚类中心实现图像的二值化,首先将图像的样本点的特征值聚类成两类for i=1:19600if (U(1,i)>U(2,i))data(i)=center(1);elsedata(i)=center(2);endend%恢复图像的像素矩阵---即由二值化后的样本矩阵回归像素矩阵b=zeros(140,140);b(1:19600)=data(1:19600);data=b;figure,imshow(data)%显示模糊C均值处理后的二值化图像title ('模糊C均值后的二值化图像')(2)运行结果源图像处理后的图像4通过设置门限进行二值化处理对图像进行提取(1)程序代码data=imread('cameraman.tif');%读入图片的像素矩阵 %data=ima(); data=double(data);data=data/1000.0;%由于函数的需要,需将data矩阵中的数值转换格式,否则出错imshow(data)%显示原始图片title ('原始图像')data%通过设置门限值对它进行二值化处理for i=1:65536if (data(i)>0.1)data(i)=1;elsedata(i)=0;endendfigure,imshow(data)%二值化图像title ('二值化图像')(2)运行结果源图像处理后的图像五. 实习总结及心得“多维信息处理实践”是电子技术课程的实践性教学环节,是对我们学习电子技术的综合性训练。