嵌入式系统IO驱动实验报告
嵌入式驱动程序设计_实验报告2
实验报告书
课程名:《嵌入式驱动程序设计》
题目:实验2LED设备驱动实验
实验类别【验证】
班级:BX1202
学号:22
姓名:王振
1、实验目的
(1)了解LED设备驱动程序。
2、实验内容
(1)创建并测试LED设备驱动程序,在虚拟机执行编译。
(2)编写设备驱动的测试程序,将编译好的设备驱动程序下载到试验箱,执行并观察结果。
(1)源码文件创建
创建LED设备驱动程序。设备驱动程序的基本作业目录是/working/device_driver。
移动到此目录中后,创建ledioport.c源文件。
(2)编译
现在创建Makefile,编译两个文件。创建Makefile。
注意:模块编译时,可通过KDIR,参考Linux内核源码目录。这时,有关内核—“/working/linux-2.6.32-hanback”必须被编译。以后进行的其它设备模块编译时也都适用。如果make clean,首先清除编译的驱动程序和执行例题文件。编译make驱动程序和执行例题程序。编译后,多数的文件被生成。在这里,观察研究ledioport.ko和led_test这两个文件。ledioport.ko是设备驱动程序项目文件,led_test是应用程序执行文件。
(3)向目标板下载及运行
使用tftp作为向目标板下载的方法。为了在目标板上通过tftp得到下载,将ledioport.ko和led_test文件复制到/tftpboot中。完成向/tftpboot复制后,则在目标板上输入下载命令。
3、实验设备
PC 机一台;操作系统:Ubuntu 8.04。
ARM实验箱。
4、实验步骤
HBE-EMPOSIII-SV210上共有8个LED与数据总线连接,如果向已定的物理地址输入值,则当有关位是1时,D打开。
嵌入式系统实验报告
嵌入式系统实验报告引言嵌入式系统作为一种广泛应用于各行各业的计算机系统,其本身具有一定的难度与挑战。
本实验报告将围绕嵌入式系统的设计、开发以及应用展开讨论,旨在总结并分享在实验中所获得的经验与知识。
一. 实验背景嵌入式系统是指以特定功能为目标的计算机系统,其设计与开发过程相较于传统的计算机系统更为复杂和精细。
本次实验的主要目标是通过设计一个基于嵌入式系统的智能家居控制器,来探索嵌入式系统的应用与实践。
二. 实验内容2.1 硬件设计嵌入式系统的硬件设计是整个实验的基础,其合理性与稳定性直接影响系统的性能和可靠性。
在本次实验中,我们选择了一块主频为xx的处理器作为核心,配备了丰富的外设接口,如GPIO、串口等。
我们还为系统增加了一块液晶显示屏和一组按键,以实现简单的用户交互。
2.2 软件开发在硬件设计完成后,我们开始进行软件开发。
首先,我们需要选择一个合适的操作系统作为嵌入式系统的基础。
针对本次实验,我们选择了xx操作系统,其具备较强的实时性和稳定性,能够满足我们对系统性能的要求。
接着,我们进行了嵌入式系统的驱动程序开发。
通过编写各个外设的驱动程序,我们实现了与液晶显示屏和按键的交互,并将其与处理器进行了适当的接口配置。
另外,我们还开发了嵌入式系统的应用程序。
通过编写智能家居控制器的代码,我们成功实现了对家居设备的远程控制和监测。
用户可以通过液晶显示屏和按键进行交互,实现对家居设备的开关、调节和状态查看等操作。
三. 实验结果与分析经过实验测试,我们发现嵌入式系统在智能家居领域的应用具有较高的可行性与实用性。
通过嵌入式系统的控制,用户可以方便地实现对家居设备的远程操控,提升了家居智能化的程度。
同时,嵌入式系统的实时性和稳定性使得智能家居控制器具备了较高的安全性和可靠性。
然而,在实验过程中我们也遇到了一些挑战。
其中,系统的驱动程序开发是较为复杂的一环,需要仔细理解硬件接口和协议,并进行合理的配置。
此外,系统的稳定性和功耗管理也是需要重点关注的问题。
嵌入式软件开发基础实验报告 存储器及IO接口

上海电力学院嵌入式软件开发基础实验报告题目:【ARM】存储器实验4.1及 I/O接口实验4.2 专业:电子科学与技术年级:姓名:学号:4.1存储器实验一、实验目的(1)通过实验熟悉ARM的内部存储空间分配;(2)掌握对存储区域进行访问的方法。
(3)熟悉用寄存器配置存储空间的方法。
二、实验设备硬件:Embest EduKit-III 实验平台,Embest ARM 标准/增强型仿真器套件,PC 机。
软件:Embest IDE Pro ARM 集成开发环境,Windows 98/2000/NT/XP。
三、实验内容掌握 S3C44B0X 处理器对存储空间的配置和读写访问的方法,熟练使用命令脚本文件对 ARM 存储控制寄存器进行正确配置;使用汇编编程,对 RAM 按字、半字和字节读写;C 语言编程,对 RAM 按字、半字和字节读写。
四、实验原理1. 存储控制器S3C44B0X 处理器的存储控制器可以为片外存储器访问提供必要的控制信号,它主要包括以下特点:支持大、小端模式(通过外部引脚来选择)地址空间。
包含 8 个地址空间,每个地址空间的大小为 32M 字节,总共有 256M 字节的地址空间。
所有地址空间都可以通过编程设置为 8 位、16 位或 32 位对准访问。
8 个地址空间中,6 个地址空间可以用于 ROM、SRAM 等存储器,2 个用于ROM、SRAM、FP/EDO/SDRAM 等存储器。
7 个地址空间的起始地址及空间大小是固定的。
1 个地址空间的起始地址和空间大小是可变的。
所有存储器空间的访问周期都可以通过编程配置。
提供外部扩展总线的等待周期。
支持 DRAM/SDARM 自动刷新。
支持地址对称或非地址对称的 DRAM。
2. 电路设计Embest EduKit-III 实验板上的存储系统包括一片 1M×16bit 的 Flash (SST39VF160)和一片 4M ×16bit 的 SDRAM (HY57V65160B)。
嵌入式实验四实验报告
嵌入式实验四实验报告实验四:嵌入式编程设计
实验设计目的:
1. 学习使用嵌入式开发工具进行编程设计;
2. 学习使用C语言编写嵌入式程序;
3. 学习使用GPIO模块进行输入输出;
4. 学习使用中断处理函数。
实验器材:
1. 嵌入式开发板;
2. USB数据线;
3. 电脑;
4. LED灯;
5. 电阻;
6. 蜂鸣器;
7. 其他必要的电路元件。
实验步骤:
1. 连接开发板和计算机,安装开发板驱动程序;
2. 打开嵌入式开发工具,创建一个新的工程;
3. 在工程中添加一个C文件,编写程序;
4. 编写程序实现以下功能:
- 使用GPIO模块控制LED灯的亮、灭;
- 使用GPIO模块读取按键状态;
- 使用GPIO模块控制蜂鸣器的开、关;
- 使用Timer模块计时;
- 使用中断处理函数处理外部中断;
- 其他必要的功能;
5. 编译程序,下载到开发板;
6. 运行程序,测试功能是否正常。
实验结果与分析:
实验结果应当是LED灯、蜂鸣器、按键正常工作,可以通过按键控制LED灯的亮、灭、蜂鸣器的开、关。
实验总结:
通过本次实验,我学会了使用嵌入式开发工具进行编程设计,掌握了使用C语言编写
嵌入式程序的方法。
通过实验,我深入理解了嵌入式系统的原理和实现方法,对嵌入
式系统的应用有了更加深入的了解。
在今后的学习和工作中,我将能够更好地运用嵌
入式技术解决实际问题。
光电工程学院学生嵌入式实验报告
Workspace。
jpeg工程,并打开。
④编译链接工程,选择菜单Project->Rebuild All。
⑤选择窗口中右上角的“Download and Debug”绿色按钮,下载目标文件。
○6选择Debug->go或点击按钮全速运行程序。
○7观察LM3S9B96 实验评估板上液晶屏,若液晶无显示,则需要按一下下开发板上的“RESET”复位键,液晶上便会出现图像,可用手指拖动移动图像。
双击打开ResultActivity.java,在public class ResultActivity extends Activity。
输入以下代码:<EditTextandroid:id="@+id/factorOne")为symbol和calculate设置显示的值,接着上面的位置输入代码:symbol.setText(R.string.symbol);calculate.setText(R.string.calculate);)最后几行选中的代码和大括号可以删除,也可不删。
对按钮设置监听器,在activity01中输入以下代码:Class CalculateListener implements OnClickListener{ }鼠标放在报错处,点击第一个Import,如下图:鼠标放在另一个报错处CalculateListener点击第一个Add后,得到如下图。
对按钮绑定监听器。
在Activity01.java中输入:calculate.setOnClickListener(new CalculateListener());Activity01.this.startActivity(intent);报错后点击Import‘Intent’(android.content)。
)打开ResultActivity.java,在public class下面一行点击鼠标右键选择source—Override/ImplementMethods。
嵌入式系统 实验报告
使能 IRQ 中断。
4 装载并使能外中断;
5 选用 DebugInExram 生成目标,然后编译连接工程。
6 选择【Project】->【Debug】,启动 AXD 进行 JTAG 仿真调试。
7 全速运行程序,LED 闪烁;
8 每一次按键 Key,蜂鸣器就会转换静音或鸣响状态。
四.测试数据及运行结果
1
五.总结
1.实验过程中遇到的问题及解决办法;
由于本次实验较简单,且我们之前学习的微机原理课程也进行了流水灯的设
计实验,所以对于本次实验,我完成地很顺利,在实验中没有遇到问题。
2.对设计及调试过程的心得体会。
本次实验是本学期该课程我们进行的第一次实验,总的来说,实验不是很难,
设计过程也相对简单,其主要目的是让我们熟悉一下实验环境,并且能在实验环
6
五.总结 1.实验过程中遇到的问题及解决办法;
实验第一次运行时,蜂鸣器一直处于鸣响状态,及时按了按键,蜂鸣器还是 一直鸣叫,不产生外中断。后来仔细检查了程序,发现原来是忘记使能 EINT0 中 断了,加上 VICIntEnable = 1<<0x0e 代码,程序就能正常运行了。 2. 对设计及调试过程的心得体会。
境下进行简单的实验操作,为之后的实验打下坚实的基础。
六.附录:源代码(电子版)
#include "config.h"
const uint32 LEDS8 = 0xFF << 18;//P1[25:18]控制 LED1~LED8,低电平点亮
const uint32 KEY = 1 << 16;
//P0.16 连接 KEY1
三.方案设计
① 启动 ADS1.2IDE 集成开发环境,选择 ARM Executable Image for lpc2131
嵌入式实习报告(共5篇)
嵌入式实习报告(共5篇)第一篇:嵌入式实习报告一、嵌入式系统开发与应用概述在今日,嵌入式ARM 技术已经成为了一门比较热门的学科,无论是在电子类的什么领域,你都可以看到嵌入式ARM 的影子。
如果你还停留在单片机级别的学习,那么实际上你已经落下时代脚步了,ARM 嵌入式技术正以几何的倍数高速发展,它几乎渗透到了几乎你所想到的领域。
本章节就是将你领入ARM 的学习大门,开始嵌入式开发之旅。
以嵌入式计算机为技术核心的嵌入式系统是继网络技术之后,又一个IT领域新的技术发展方向。
由于嵌入式系统具有体积小、性能强、功耗低、可靠性高以及面向行业具体应用等突出特征,目前已经广泛地应用于军事国防、消费电子、信息家电、网络通信、工业控制等各个领域。
嵌入式的广泛应用可以说是无所不在。
嵌入式微处理器技术的基础是通用计算机技术。
现在许多嵌入式处理器也是从早期的PC 机的应用发展演化过来的,如早期PC 诸如TRS-80、Apple II 和所用的Z80 和6502 处理器,至今仍为低端的嵌入式应用。
在应用中,嵌入式微处理器具有体积小、重量轻、成本低、可靠性高的优点。
嵌入式处理器目前主要有Am186/88、386EX、SC-400、Power PC、68000、MIPS、ARM 等系列。
在早期实际的嵌入式应用中,芯片选择时往往以某一种微处理器内核为核心,在芯片内部集成必要的ROM/EPROM/Flash/EEPROM、SRAM、接口总线及总线控制逻辑、定时/计数器、WatchDog、I/O、串行口、脉宽调制输出、A/D、D/A 等各种必要的功能和外设。
二、实习设备硬件:Embest EduKit-IV实验平台、ULINK2仿真器套件、PC机软件:μVision IDE for ARM集成开发环境、Windows 98/2000/NT/XP三、实习目的1.初步掌握液晶屏的使用及其电路设计方法;掌握S3C2410X处理器的LCD控制器的使用;掌握通过任务调用的方法把液晶显示函数添加到uC/OS-II中;通过实验掌握液晶显示文本及图形的方法与程序设计。
嵌入式系统实验报告一

2008221104210068 陈见08计科2班嵌入式系统实验报告一一.实验目的:1.了解嵌入式开发中的硬件(e.g.EELIOD)与软件(e.g.bootloader)2.了解嵌入式系统的开发环境,内核的下载和启动过程3.了解Linux内核配置和编译过程•了解Linux内核源代码的目录结构以及各目录的相关内容•了解Linux内核一些基本配置选项内容和作用•掌握Linux内核的编译过程4.了解嵌入式文件系统的构建过程•了解嵌入式操作系统种文件系统的类型和作用•掌握利用BusyBox 软件制作嵌入式文件系统的方法•掌握嵌入式Linux 文件系统的的挂载过程二.实验内容:<1>嵌入式系统开发1、bootloader嵌入式系统中通常并没有像BIOS那样的固件程序,因此整个系统的加载启动任务完全由bootloader来完成。
其主要作用是:初始化硬件设备;建立内存空间的映射图;完成内核的加载,为内核设置启动参数。
bootloader 就是在操作系统内核运行之前运行的一段小程序。
通过这段小程序,我们可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
2、串口设置(minicom)多数嵌入式系统都通过异步串行接口(UART)进行初级引导。
这种通信方式是将字符一位一位地传送,一般是先低位、后高位。
因此,采用串行方式,双方最少可以只用一对连线便可实现全双工通信。
字符与字符之间的同步靠每个字框的起始位协调,而不需要双方的时钟频率严格一致,因此实现比较容易。
启动minicom▪主机运行minicom,该程序通过串口(RS232)和目标机连接。
▪ minicom-s表示对串口进行设置,普通用户不需要这一步。
▪串口设置/dev/ttys0 bps=115200,8位数据,无检验,无流控制。
▪bootloader提示符下面可设定本机IP,宿主机IP,将要下载的内核文件名,文件系统名及其它参数。
嵌入式系统实验IO接口
可扩展性和可维护性相对较差,模块机制就是为了弥补这一缺陷。 模块是具有独立功能的程序,它可以被单独编译,但不能独立运行。
它在运行时被链接到内核作为内核的一部分在内核空间运行,这与运行在
用户空间的进程是不同的。模块通常由一组函数和数据结构组成,用来实 现一种文件系统、一个驱动程序或其他内核上层的功能。
static int led_release(struct inode *inode,struct file *file) {
3
之类的函数来读写 IO 端口;后一种 MMIO 是先把 IO 端口映射到 IO 内存(“内 存空间”),再使用访问 IO 内存的函数来访问 IO 端口。
对于 RISC 处理器(如 ARM、PowerPC 等),通常只实现一个物理地址空间, 外设 I/O 端口成为内存的一部分。此时,CPU 可以像访问一个内存单元那样访问 外设 I/O 端口, 而不需要设立专门的外设 I/O 指令。这两者在硬件实现上的差 异对于软件来说是完全透明的, 驱动程序开发人员可以将存储器映射方式的 I/O 端口和外设内存统一看作是“I/O 内存” 资源。
0100 = CF_DMARQ
2
0101 = TS_DATA
0110~1110 = Reserved
1111 = GPJ0_INT[3] 本次实验中,主要用到了 Output 功能,而对其他功能没有涉及,所以在端 口功能设置的时候,主要考虑这一点。GPJ0DAT 寄存器用于 GPJ0 口的数据操 作,一共有 8 位,端口配置为输入时, 从寄存器读入值对应位反映引脚电平状 态; 端口配置为输出时, 写出位产生对应引脚电平;端口配置为功能引脚时, 寄 存 器值不确 定,实 验中, 主要使用 其输出 功能。 GPJ0PUD、 GPJ0DRV 、 GPJ0CONPDN、GPJ0PUDPDN 功能不涉及,这里不做过多的介绍。 3) IO 端口地址映射 在介绍 IO 端口地址映射时,有必要介绍一下地址空间的概念。 物理地址:CPU 地址总线传来的地址,由硬件电路控制其具体含义。物理 地址中很大一部分是留给内存条中的内存的,但也常被映射到其他存储器上 (如显存、BIOS 等)。在程序指令中的虚拟地址经过段映射和页面映射后,就 生成了物理地址,这个物理地址被放到 CPU 的地址线上。 物理地址空间,一部分给物理 RAM(内存)用,一部分给总线用,这是 由硬件设计来决定的,因此在 32 bits 地址线的 x86 处理器中,物理地址空间是 2 的 32 次方,即 4GB,但物理 RAM 一般不能上到 4GB,因为还有一部分要给 总线用(总线上还挂着别的许多设备)。在 PC 机中,一般是把低端物理地址给 RAM 用,高端物理地址给总线用。 总线地址:总线的地址线或在地址周期上产生的信号。外设使用的是总线 地址,CPU 使用的是物理地址。物理地址与总线地址之间的关系由系统的设计 决定的。在 x86 平台上,物理地址就是总线地址,这是因为它们共享相同的地 址空间。因为物理地址和总线地址相同,所以凭眼睛看是不能确定这个地址是 用在哪儿的,它或者在内存中,或者是某个卡上的存储单元, 甚至可能这个 地址上没有对应的存储器。 虚 拟 地 址 : 现 代 操 作 系 统 普 遍 采 用 虚 拟 内 存 管 理 ( Virtual Memory Management)机制,这需要 MMU(Memory Management Unit)的支持。MMU 通常是 CPU 的一部分,如果处理器没有 MMU,或者有 MMU 但没有启用,CPU 执行单元发出的内存地址将直接传到芯片引脚上,被 内存芯片(物理内存) 接收,这称为物理地址(Physical Address),如果处理器启用了 MMU,CPU 执 行单元发出的内存地址将被 MMU 截获,从 CPU 到 MMU 的地址称为虚拟地 址(Virtual Address),而 MMU 将这个地址翻译成另一个地址发到 CPU 芯片的 外部地址引脚上,也就是将虚拟地址映射成物理地址。 Linux 中,进程的 4GB(虚拟)内存分为用户空间、内核空间。用户空间 分布为 0~3GB(即 PAGE_OFFSET,在 0X86 中它等于 0xC0000000),剩下的 1G 为内核空间。程序员只能使用虚拟地址。系统中每个进程有各自的私有用 户空间(0~3G),这个空间对系统中的其他进程是不可见的。 CPU 发出取指令请求时的地址是当前上下文的虚拟地址,MMU 再从页表 中找到这个虚拟地址的物理地址,完成取指。同样读取数据的也是虚拟地址, 比如 mov ax, var. 编译时 var 就是一个虚拟地址,也是通过 MMU 从也表中来 找到物理地址,再产生总线时序,完成取数据的。 访问 IO 端口有 2 种途径:I/O 映射方式(I/O-mapped)、内存映射方式 (Memory-mapped)。前一种途径不映射到内存空间,直接使用 intb()/outb()
《嵌入式系统》课程实验报告-stm32单片机gpio程序开发

实验概述
【实验目的及要求】 实验目的: 1. 掌握 STM32 单片机输入输出接口程序开发 2. 掌握用寄存器开发 STM32 单片机程序 3. 掌握用库函数开发 STM32 单片机程序 实验要求: 1. 完成实验要求中提到要完成的所有内容,完成代码并提交主要代码。 2. 分析寄存器和库函数编程的优势和劣势,你喜欢用哪种方式。 3. 对每行主要代码要进行注释,说明其功能。 实验内容:
1.熟悉 TEB-CM5000 嵌入式单片机实验系统上的 LED 灯电路和单独按钮电路。
2.学习并掌握寄存器版本、库函数版本相关的实例程序,主要学习实例 stm32referencesrcforch5 目录下的,LED、LEDLib、KEY_LED 和 KEY_LEDlib 四 个程序。
3.利用寄存器位操作模式、库函数分别开发出 USER2(PD3)按钮控制 LD5(PF7)亮灭。具体功能:USER2(PD3)按钮按下时,LD5 灯闪烁;当 USER2(PD3) 按钮弹开时,LD5 灯停止闪烁。 4.实现利用寄存器位操作模式、库函数分别开发出: 当每次 USER2(PD3)按钮 按下时,LD5 灯只闪烁一次。 【实验环境】 1. TEB-CM5000 嵌入式单片机实验系统 2. MDK4.12 嵌入式软件开发环境
2.当每次 USER2(PD3)按钮按下时,LD5 灯只闪烁一次。
(1)寄存器位操作模式 循环判断 PD3 的状态,并执行对应操作(点亮或熄灭灯)
(3) 库函数
循环判断 PD3 的状态,并执行对应操作(点亮或熄灭灯)
小结
1. 只闪烁一次跟一直闪烁的区别主要在于 Flag 值。 在只闪烁一次的程序中, 设置 flag 值作为标志,灯亮以后改变 flag 值的状态,flag 的状态改变灯的 状态就不再继续。
嵌入式驱动程序设计_实验报告1

2是在内核中删除模块时调用的函数。
3是向内核装载模块时指定内核调用的函数的宏和在内核中删除模块时指定内核调用的函数的宏。
4是标记模块许可证的部分。
创建为了编译已创建模块的Makefile。译器设定为交叉编译器— arm-linux-gcc。
1定义要生成模块的模块名称。
2指定内核的源码位置。
3指定作为要编译的对象的模块源码所在的当前目录。
4指定编译模块的命令。
5作为编译结果生成的文件全部删除。
模块程序编译:编译模块。确认生成的文件列表。生成的文件中加载到内核中的模块文件是hello.ko。
模块运行:在目标板上运行模块的方法虽然有很多种,但是这里将说明利用tftp运行的方法。将hello.ko文件复制到/tftpboot目录中。在目标板上登录到内核中后,下载hello.ko文件。并且将hello模块加载到内核中。利用lsmod确认装载的模块列表。第一列显示注册的模块名,第二列显示模块在内核中占据的内存大小,第三列显示使用与否,第四列显示正参考的有关模块的模块名。删除内核中注册的模块。这时,仅指定设备驱动程序模块名。
图1-5下载内核
(6)删除内核中注册的模块。这时,仅指定设备驱动程序模块名。
图1-6注Leabharlann 内核6、实验思考题(1)请说明嵌入式驱动程序由哪些组成部分。
答:1.自动配置和初始化子程序,负责监测所要驱动的硬件设备是否存在和能否正常工作。如果该设备正常,则对这个设备及其相关的设备驱动程序需要的软件状态进行初始化。这部分驱动程序仅在初始化时被调用一次。
7、实验体会
通过这次实验我知道模块是具有内核程序的特征的同时在内核中被动态装载和删除,因此需要具有与一般程序不同的源码形式。以对象形式创建如设备驱动程序的内核库,如果通过系统调用向Linux内核请求装载,则内核使有关对象动态链接到内核中。但是,由于其不能通过自身进行链接处理,因此提供了内核符号表功能。
嵌入式实验报告

嵌⼊式实验报告实验⼀流⽔灯实验1实验⽬的1、掌握如何利⽤STM32F407IGTb芯⽚的I/O⼝控制LED。
2、了解掌握STM32F407GPIO的使⽤。
3、点亮⼀个led,使4个LED灯循环流动,达到流⽔效果。
2实验环境FS-STM32F407开发平台ST-Link仿真器RealView MDK5.10集成开发软件STM32CUBEMX图形开发软件PC机Xp3实验内容熟悉开发环境,构建基于固件库的⼯程,编写实验代码实现流⽔灯⼯程,实现FS-STM32F407开发平台上的LED循环闪烁。
调试编译好固件程序后,将程序下载到开发板,按复位键观察实验结果。
4实验步骤1.new project-stm32f4-stm32f407/417-LQFP176-STM32F407IGTX然后点⿏标⽣成。
2.将4个引脚设置为GPIO_Output。
3.如图所⽰设置RCC。
4.将下图时钟频率改为168。
5.点击⽣成按钮--选择⼯程路径Project Location-⼯程名字Project Name-⼯具/开发集成⼯具(Toolchain/IDE)(MDK-ARM V5)。
6.在Code Generator当中,在Generated Files当中,将Generate peripheral。
勾上然后OK。
5实验结果编译完程序后,下载到实验箱,按RESET键,按键数码管附近D4,D3,D2,D1附近四个灯循环亮灭,⽽且每次只有⼀个灯亮,达到流⽔效果。
实验⼆串⼝实验1实验⽬的1、了解TM32F407GPIO的配置过程及使⽤⽅法。
2、查找到串⼝对应的引脚,达到串⾏的效果。
3、了解实验箱底板图等。
2实验环境FS-STM32F407开发平台ST-Link仿真器RealView MDK5.10集成开发软件PC机XP、Window7/8(32/64bit)串⼝调试⼯具串⼝交叉线3实验内容1、了解keil的使⽤2、STM32CUBEMX软件的使⽤3、查找到串⼝对应的引脚,达到串⾏的效果。
嵌入式系统实训报告范文3篇
嵌入式系统实训报告范文嵌入式系统实训报告范文精选3篇(一)以下是一份嵌入式系统实训报告范文,供参考:实训报告课程名称:嵌入式系统实训姓名:XXX学号:XXXX日期:XXXX年XX月XX日一、实训目的和背景嵌入式系统是一种专门用于控制和执行特定任务的计算机系统。
本次实训旨在通过设计、搭建并测试一个简单的嵌入式系统,帮助学生理解嵌入式系统的根本原理和应用,并提供理论时机来加深对嵌入式系统的理解和应用才能。
二、实训内容1. 系统设计本实训的目的是设计一个简单的温度监测系统。
该系统包括一个传感器用于检测环境温度,并将温度值传输到单片机上进展处理。
单片机再将处理后的数据显示在LCD屏幕上。
2. 硬件搭建根据系统设计,我们首先需要准备以下硬件器件:传感器、单片机、LCD屏幕、电等。
实际搭建时,我们按照电路图连接各个硬件器件,并进展电接入和信号连接的测试。
3. 软件编程完成硬件搭建后,接下来需要进展软件编程。
我们使用C语言来编写嵌入式系统的程序。
主要编程内容包括读取传感器数据、对数据进展处理和计算、将计算结果显示在LCD屏幕上等。
4. 系统测试完成软件编程后,我们进展系统测试。
主要测试内容包括:检测传感器是否能准确读取温度数据、单片机是否能正确处理数据、LCD屏幕是否正常显示等。
通过测试,可以评估系统的稳定性和可靠性。
三、实训收获通过参与本次实训,我收获了以下几点:1. 对嵌入式系统的理解更加深化:通过实操,我对嵌入式系统的原理和应用有了更深化的理解。
2. 掌握了硬件搭建和连接的技能:我学会了如何搭建和连接硬件器件,进步了理论操作才能。
3. 锻炼了软件编程才能:通过编写嵌入式系统的程序,我熟悉了C语言的应用,并提升了编程才能。
4. 增加了问题解决才能:在搭建和编程过程中,遇到了一些困难和问题,通过不断调试和学习,我学会了如何解决问题和排除故障。
综上所述,本次嵌入式系统实训对于进步我的理论操作才能、编程才能和问题解决才能具有重要意义。
嵌入式技术及应用实验报告(中南民族大学)
院系:计算机科学学院专业:
年级:
学号:
姓名:
指导教师:
年月日
实验步骤与结果分析1.通过编译、下载、仿真可以看到我们想要的结果
图2-1
2.得到一个1K的仿真频率
2.1 因为得到的是更新频率,所以根据公式:
计数初值CCRx_Val = TIM2计数时钟频率/ 更新频率
所以有CCRx_Val = 0X1700
2.2 在工程中将对应的CCRx_Val值改为0X1770,然后编译、仿真、测频率,如图所示:
图2-2
实验结果分析:
通过本次实验达到了开始的实验目的和要求,加强对TIMERx定时器的理解和使用,以及在仿真过程中学会了怎样应对出现的问题。
实验步骤与结果分析1.在编译、下载之后,会在LCD上显示相应的英文字母和数字。
2.通过修改显示学号和名字,如图所示:
图3-1
实验结果分析:
通过本次实验,达到了实验预期的效果,学会了用怎样实现在LCD上显示中文名,和学号等功能。
嵌入式系统实训报告

第一天一、实训任务:1.熟悉虚拟机的环境,了解了虚拟机的基础知识2.安装与配置 VMware Workstation虚拟机3.进而熟悉交叉编译环境,完成交叉编译环境的安装和配置4.测试端口的连通性二、原理交叉编译,就是在一个平台上生成另一个平台上的可执行代码。
这里需要注意的是所谓平台,实际上包含两个概念:体系结构(Architecture)、操作系统(Operating System)。
同一个体系结构可以运行不同的操作系统;同样,同一个操作系统也可以在不同的体系结构上运行。
一般情况下,主机和目标机是同一类型的计算机,这就是正常的编译。
所谓交叉编译就是在主机上为目标机编译,比如在 PC 上编译,然后在手机上运行,这种编译就叫交叉编译。
交叉编译需要交叉编译器,不同的目标机(主要是看芯片类型)需要不同的交叉编译器。
我们所用的交叉编译器就是 arm-linux-gcc 系列。
构建一个交叉编译器(toolchain),说简单也简单,说复杂也复杂。
原理上很简单,实际情况常常比较复杂,原因是编译器一直处于开发状态,你要了解某个版本的稳定性,要去找patch。
网上已经有不少已经构建好了的交叉编译器(toolchain),除非你想了解如何构建交叉编译器,否则直接下载一个来用是比较明智的做法。
三、截图及说明1、测试连通性:COM3显示了相关信息,表示虚拟机和开发机连通了2、可执行以下命令,安装交叉编译环境:#mkdir -p /A8RP/tools /A8RP/toolchain#cd /media/cdrom/linux/toolchain#cp –arfarm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz2arm-2009q1-203-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2 /A8RP/tools#cd /A8RP/toolchain#tar -jxvf arm-2007q3-51-arm-none-linux-gnueabi-i686.tar.bz2#tar –jxvf arm-2009q1-203-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2# cp media/cdrom/linux/tools/mkimage /A8RP/tools# cp /media/cdrom/linux/tools/signGP /A8RP/tools#cp /media/cdrom/linux/tools/mkfs.ubifs /A8RP/tools#cp /media/cdrom/linux/tools/ubinize /A8RP/tools#cp /media/cdrom/linux/tools/ubinize.cfg /A8RP/tools添加环境变量#export PATH=/A8RP/toolchain/arm-2007q3/bin:/A8RP/toolchain/arm-2009q1/bin:/A8RP/tools:$PATH这样我们就完成了交叉编译环境及编译工具的安装第二天一、实训任务:1.交叉编译生成用于SD 卡启动的x-loader 映像文件MLO2.U-Boot的编译3.kernel的编译4.格式化SD 卡,并设置活动分区,将编译好的系统镜像以及文件系统拷贝至SD卡二、原理OURS-A8RP 支持MMC/SD 启动或NAND 启动,不同的启动方式烧写的x-loader 的映像文件是不一样的,对应的映射生成方法也不同。
嵌入式实验实习报告

一、实习背景随着物联网、智能家居、工业自动化等领域的快速发展,嵌入式系统在各个行业中的应用越来越广泛。
为了使同学们更好地了解嵌入式系统,提高实际动手能力,我选择了嵌入式实验实习课程。
本次实习以STM32微控制器为核心,通过一系列实验,掌握嵌入式系统的基本原理和开发流程。
二、实习目的1. 熟悉STM32微控制器的硬件结构和功能。
2. 掌握Keil MDK和IAR EWARM等集成开发环境的使用。
3. 学会编写C语言程序,实现嵌入式系统功能。
4. 提高动手实践能力和问题解决能力。
三、实习内容1. 硬件平台搭建(1)STM32F103C8T6微控制器:作为本次实习的核心,负责处理各种控制任务。
(2)开发板:包括电源、时钟、存储器、I/O口、通信接口等模块。
(3)调试器:用于调试和下载程序。
2. 软件平台搭建(1)Keil MDK:作为嵌入式开发的主流集成开发环境,提供代码编辑、编译、调试等功能。
(2)IAR EWARM:另一款常用的嵌入式开发环境,与Keil MDK类似。
3. 实验内容(1)LED闪烁实验本实验通过编写C语言程序,实现LED灯的闪烁功能。
通过配置GPIO口,使LED灯以一定频率闪烁。
(2)按键扫描实验本实验通过扫描按键输入,实现按键的功能。
通过配置GPIO口和中断,检测按键状态,并实现按键功能。
(3)定时器实验本实验通过配置定时器,实现定时中断功能。
定时器中断可用于实现延时、定时等功能。
(4)串口通信实验本实验通过配置串口,实现微控制器与PC之间的通信。
通过串口发送和接收数据,实现数据的传输。
(5)PWM实验本实验通过配置PWM(脉冲宽度调制)模块,实现LED灯的亮度调节。
通过改变PWM占空比,实现LED亮度的调节。
四、实习过程1. 熟悉开发板和调试器首先,熟悉开发板和调试器的各个模块和功能,了解它们在嵌入式系统中的作用。
2. 熟悉集成开发环境其次,学习Keil MDK和IAR EWARM的使用,掌握代码编辑、编译、调试等基本操作。
嵌入式实验报告 IO口驱动实验

实验七I/O口驱动实验一、实验目的:1、了解PXA270 微处理器GPIO 的功能2 、熟悉PXA270 微处理器GPIO 驱动程序的编写方法3、掌握驱动程序的加载过程和方法二、实验环境(软件与硬件):软件环境:VMware Workstation硬件环境: pc机、arm机三、实验过程和结果(包括编写的程序与结果,结果要截图)第1步:利用vi编辑器,编写一个xsb_seg.c 驱动代码;(1)增加驱动所需的头文件和变量#include<linux/module.h>#include<linux/kernel.h>#include<asm/io.h>#include<asm/uaccess.h>#include<linux/fs.h>MODULE_LICENSE("GPL");char LED_MODULE=0;#define DEVICE_NAME "xsb_seg"#define SEG_CS1 0x10300000#define SEG_CS2 0x10400000static char LED[10]={0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7F, 0x6F};unsigned long *CS1_Address, *CS2_Address;struct seg{char LED1_Val;char LED2_Val;char LED3_Val;char LED4_Val;char negative;};(2)同时更新所有七段数码光驱动管显示函数static void Updateled(struct seg *seg_7){unsigned short buff=0x00;buff=seg_7->LED1_Val;buff=buff|( seg_7->LED2_Val <<8);writew(buff,CS1_Address);buff=0x00;buff=seg_7->LED3_Val;buff=buff|( seg_7->LED4_Val<<8);writew(buff,CS2_Address);return;}(3)写具体某位七段数码光驱动管显示函数void value_seting(struct seg *seg_7, char position, char value) {if (seg_7->negative==0)value=~value & ~(0x1<<7);elsevalue=(0x1<<7)|value;if (position==1)seg_7->LED1_Val=value;else if(position==2)seg_7->LED2_Val=value;else if(position==3)seg_7->LED3_Val=value;else if(position==4)seg_7->LED4_Val=value;}(4)实现七段数码光驱动写操作函数static ssize_t XSB_Seg_write(struct file *file, const char *buffer, size_t count, loff_t * ppos){int i;struct seg *seg_7=file->private_data;char led_forall[4];printk(KERN_EMERG "The Module is written,XSB_Seg_write\n");if(count!=4){printk(KERN_EMERG "the count of input is not 4!!");return 0;}if(copy_from_user(led_forall, buffer, 4)){for(i=1;i<=4;i++){value_seting(seg_7, i, LED[led_forall[i-1]]);}Updateled( seg_7 );}return 0;}(5)实现七段数码管驱动IOCTL操作函数static int XSB_Seg_ioctl(struct inode *ip, struct file *fp, unsigned int cmd, unsigned long arg){char val=0x00;struct seg *seg_7=fp->private_data;if (!arg)return -EINVAL;if (copy_from_user(&val, (int *)arg, sizeof(char)))return -EFAULT;switch(cmd){case 1:value_seting(seg_7, 1, val);break;case 2:value_seting(seg_7, 2, val);break;case 3:value_seting(seg_7, 3, val);break;case 4:value_seting(seg_7, 4, val);break;case 0:seg_7->negative = LED_MODULE;break;default:printk(KERN_EMERG"ioctl parameter error,please input number 0-4");break;}Updateled( seg_7 );return 0;}(6)实现七段数码管驱动打开操作函数static int XSB_Seg_open(struct inode *inode, struct file *filp){struct seg *seg_7;printk(KERN_EMERG "The Module is open,XSB_Seg_open\n");seg_7=kmalloc(sizeof(struct seg), GFP_KERNEL);filp->private_data=seg_7;return 0;}(7)实现七段数码管驱动释放函数static int XSB_Seg_release(struct inode *inode, struct file *filp) {printk(KERN_EMERG "The Module is release,XSB_Seg_release\n");kfree(filp->private_data);return 0;}(8)七段数码管驱动文件结构体定义static struct file_operations Emdoor_fops = {open: XSB_Seg_open,write: XSB_Seg_write,release:XSB_Seg_release,ioctl: XSB_Seg_ioctl,owner: THIS_MODULE,};(9)实现七段数码管驱动初始化函数static int __init XSB_Seg_init(void){int ret;printk(KERN_EMERG "The Module is Init,XSB_Seg_init\n");CS1_Address=ioremap(SEG_CS1, 4);CS2_Address=ioremap(SEG_CS2, 4);ret = register_chrdev(61, DEVICE_NAME, &Emdoor_fops);if (ret < 0) {printk(DEVICE_NAME " can't get major number\n");return ret;}return 0;}(9)实现七段数码管驱动模块退出函数与模块描述static void __exit XSB_Seg_exit(void){printk(KERN_EMERG "The Module is Exit,XSB_Seg_exit\n");iounmap(CS1_Address);iounmap(CS2_Address);unregister_chrdev(61, DEVICE_NAME);}module_init(XSB_Seg_init);module_exit(XSB_Seg_exit);MODULE_AUTHOR("Ben.li, ben.li@");MODULE_DESCRIPTION("This is a 8 Segment Led driver demo");第2步:利用vi编辑器,编写一个用于编译xsb_seg.c驱动架构Makefile文件;# Makefile for the 8Segment_Led Driver. #CFLAGS +=$(DEBFLAGS) -Wallifneq ($(KERNELRELEASE),)obj-m :=xsb_seg.oelseKERNELDIR ?=/root/work/linux-2.6.22.10PWD :=$(shell pwd)ALL:$(MAKE) $(CFLAGS) -C $(KERNELDIR) M=$(PWD) modulesendifclean:rm –fr *.o *.ko *~ core .depend .*.cmd *.mod.c .tmp_versions第3步:运行make编译命令,用ls命令查看编译后的结果,在该目录中应生成xsb_seg.ko模块文件,利用file命令查看xsb_seg.ko文件的格式,应为ARM 格式的ELF文件。
嵌入式实验报告 (2) IO口的实验
实验名称: IO口的实验一.实验目的通过该实验实习,熟悉 MCU 的第一个 C 程序框架结构方式;掌握 IO 口的编程方法;了解最小系统的测试方法;模仿小灯驱动程序,编写 IO 口的开关程序:了解原程序工程中添加新模块的方法。
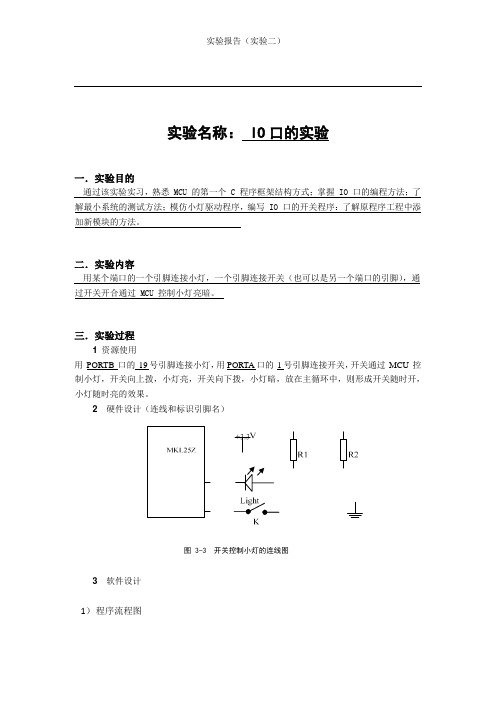
二.实验内容用某个端口的一个引脚连接小灯,一个引脚连接开关(也可以是另一个端口的引脚),通过开关开合通过 MCU 控制小灯亮暗。
三.实验过程1 资源使用用PORTB 口的19号引脚连接小灯,用PORTA口的1号引脚连接开关,开关通过MCU 控制小灯,开关向上拨,小灯亮,开关向下拨,小灯暗,放在主循环中,则形成开关随时开,小灯随时亮的效果。
2 硬件设计(连线和标识引脚名)图 3-3 开关控制小灯的连线图3 软件设计1)程序流程图设置portA1和portB19为GPIO口设置GPIOA_PDDR=0设置GPIOB_PDDR=1GPIOA_PDIR=1 GPIOB_PDOR=0GPIOB_PDOR=1 YNEnd2)编程(1)C 语言编写的MCU 的IO口实验IO口实验的key.h代码:Volatile unit_32 *portB_ptr=( Volatile unit_32 *)0x4004A000u;Volatile unit_32 *portB_PCR_19=portB_ptr+19;Volatile unit_32 *gpioB_ptr=( Volatile unit_32 *)0x400FF040u;Volatile unit_32 *portB_PDDR=gpio_ptr+5;Volatile unit_32 *portB_PDOR=gpio_ptr+0;*portB_PCR_19=0x00000100;*portB_PDDR |=(1<<19); //定义为输出Volatile unit_32 *portA_ptr=( Volatile unit_32 *)0x40049000u;Volatile unit_32 *portA_PCR_1=portB_ptr+1;Volatile unit_32 *gpioA_ptr=( Volatile unit_32 *)0x400FF000u;Volatile unit_32 *portA_PDDR=gpio_ptr+5;Volatile unit_32 *portA_PDIR=gpio_ptr+4;*portA_PCR_1=0x00000100;*portA_PDDR &=~(1<<1); //定义为输入#define *portB_PDOR OUT#define *portA_ PDIR INC 语言编写的MCU的IO口实验IO口实验的key.c代码Void key(Volatile unit_32 IN){If(IN=(1>>1)&&1 ){OUT|=(1<<19);}elseOUT&=~(1<<19);}C 语言编写的MCU 的IO口实验IO口实验的main.c代码#include “incude.h”int main(void){*portB_PDO |= (1<<19);Key(IN);Return 0;}五.实验练习(1)请修改小灯闪烁程序,改变两个延时程序延时长度,其他程序不改变,观察效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式系统实验报告(五)--IO接口驱动138352019陈霖坤一实验目的学习嵌入式Linux操作系统设备驱动的方法。
二实验内容与要求根据硬件接口资料,实现任意一个设备的基本控制功能,包括驱动程序和用户程序。
三从外设到用户空间1内核空间与用户空间Linux简化了分段机制,使得虚拟地址与线性地址总是一致,因此,Linux的虚拟地址空间也为0~4G。
Linux内核将这4G字节的空间分为两部分。
将最高的1G字节(从虚拟地址0xC0000000到0xFFFFFFFF),供内核使用,称为“内核空间”。
而将较低的3G字节(从虚拟地址0x00000000到0xBFFFFFFF),供各个进程使用,称为“用户空间”。
内核空间和用户空间都是指虚拟空间,也就是虚拟地址。
这个概念的由来,跟CPU的发展有很大关系,在目前CPU的保护模式下,系统需要对其赖以运行的资料进行保护,为了保证操作系统内核资料,我们把内存空间进行划分,一部分为操作系统内核运行的空间,另一部分是应用程序运行的空间,所谓空间就是内存的地址。
在386以前的CPU实模式下,操作系统内核与用户程序的内存空间是不做区分的,也就不存在内核空间和用户空间的说法了。
CPU的保护模式的一个重大特点,也就是硬件直接支持的内存访问模式,虚拟地址空间到物理地址空间的映射。
这种工作模式与内核空间用户空间在技术上的相辅相成,也是促成内存空间划分的原因。
操作系统为了保护自己不被普通程序的破坏,对内核空间进行了一些定义,比如访问权限,换入换出,优先级等等。
也就是说内核空间只允许内核访问,用户程序如果要访问内核空间就需要经过内核的审核。
2ioremap几乎每一种外设都是通过读写设备上的寄存器来进行的,通常包括控制寄存器、状态寄存器和数据寄存器三大类,外设的寄存器通常被连续地编址。
根据CPU体系结构的不同,CPU对IO端口的编址方式有两种:(1)I/O映射方式(I/O-mapped)处理器(如X86)为外设专门实现了一个单独的地址空间,称为"I/O地址空间"或者"I/O 端口空间",CPU通过专门的I/O指令(如X86的IN和OUT指令)来访问这一空间中的地址单元。
(2)内存映射方式(Memory-mapped)RISC指令系统的CPU(如ARM、PowerPC等)通常只实现一个物理地址空间,外设I/O端口成为内存的一部分。
此时,CPU可以象访问一个内存单元那样访问外设I/O端口,而不需要设立专门的外设I/O指令。
但是,这两者在硬件实现上的差异对于软件来说是完全透明的,驱动程序开发人员可以将内存映射方式的I/O端口和外设内存统一看作是"I/O内存"资源。
一般来说,在系统运行时,外设的I/O内存资源的物理地址是已知的,由硬件的设计决定。
但是CPU通常并没有为这些已知的外设I/O内存资源的物理地址预定义虚拟地址范围,驱动程序并不能直接通过物理地址访问I/O内存资源,而必须将它们映射到核心虚地址空间内(通过页表),然后才能根据映射所得到的核心虚地址范围,通过访内指令访问这些I/O内存资源。
Linux在io.h 头文件中声明了函数void*ioremap(unsigned long phys_addr,unsigned long size,unsigned long flags);用来将I/O内存资源的物理地址映射到核心虚地址空间(3GB-4GB)中。
void iounmap(void*addr)函数用于取消ioremap()所做的映射。
在将I/O内存资源的物理地址映射成核心虚地址后,理论上讲我们就可以象读写RAM 那样直接读写I/O内存资源了。
四电路与寄存器介绍S5PV210有237只多功能引脚,大多数是功能复用的,可以通过初始化编程将它们设置为GPIO(General Purpose I/O,通用IO)或者某个具体功能。
本实验中利用GPIO寄存器实现对LED的控制。
实验板上一共有五只LED,一只是电源指示灯,一只由PWM控制,剩下三个分别对应GPJ0_3、GPJ0_4、GPJ0_5。
实验指导书中列出了一系列GPJ0的相关寄存器,本次用到的有GPJ0CON和GPJ0DAT,前者在0001时对应GPJ0的输出模式,后者一共有8位,对应写到IO口的数据,因为LED共阳连接,所以IO给出低电平时显示亮。
五实验步骤与现象有过在PC上编写设备驱动的经验之后,构建嵌入式系统上的IO驱动接口变得更为简洁。
1内核模块这是IO接口驱动的核心,负责将对寄存器的操作传递给用户。
先仿照实验指导书给出的例子,编写一个简单的模块,实现对IO的控制。
int init_module(){*pCon=ioremap(GPJ0CON,4);*pDat=ioremap(GPJ0DAT,4);*pCon&=0xff000fff;*pCon|=0x00111000;*pDat&=~(1<<3);int major=register_chrdev(LEDMAJOR,LEDNAME,&fops);printk(“MAJOR:%d\n”,major);}在函数定义之前,还需要定义KERNEL和MODULE标志,GPL授权,宏定义设备名、主设备号等,在此前的设备驱动实验报告中已有介绍。
需要特别提到的是,pCon和pDat 需声明为volatile int*型,volatile的本意是“易失的,易挥发的”,被它修饰的变量,会跳过优化,每一次被访问时,都会从其相对应的内存单元中取值,从而保证了读写的数据与硬件真实情况相符合。
一般说来,volatile用在下面的几个地方:1、中断服务程序中修改的供其它程序检测的变量需要加volatile;2、多任务环境下各任务间共享的标志应该加volatile;3、存储器映射的硬件寄存器通常也要加volatile说明。
此外程序最开始还要定义GPIO寄存器地址。
#define GPJ0CON0XE0200240#define GPJ0DAT0XE0200244模块初始化程序做的工作是,将I/O内存资源的物理地址映射到核心虚地址空间(3GB -4GB)中,进而访问IO资源。
上面的初始化函数中,可以不注册设备,因为是直接对GPIO地址操作,而注册设备是为了之后在用户空间调用做准备。
后来我将模块初始化函数修改为,点亮三只LED,延时400毫秒再全部熄灭,从而提示用户加载成功。
同样,也可以写出注销模块函数。
void cleanup_module(){*pDat|=(1<<3);unregister_chrdev(SPEAKERMAJOR,SPEAKERNAME);}仿照设备驱动试验中的Makefile编辑并编译,其中需要更改的地方是内核目录,因为编译时要先进入内核目录读Makefile。
ifneq($(KERNELRELEASE),)obj-m:=ledctl.oelseKDIR:=$KERNELPATH/buildPWD:=$(shell pwd)default:$(MAKE)-C$(KDIR)SUBDIRS=$(PWD)modulesendif编译为.ko文件后,在开发板上加载,可以看到LED1(GPJ0_3)亮,卸载模块则灯灭。
卸载时内核消息提醒在lib/下找不到目录,新建/lib/modules/2.6.35.7目录,卸载成功。
在开发板上加载模块,即便没有指明优先级也会打印出来,但是在PC机上,指定最高级别也不会在终端中自动打印,没找到原因。
继续编写file_operations相关函数,使用户程序能以设备读写的方式实现对LED的控制。
open函数的功能包括:内核消息确认设备打开;DeviceOpen计数,防止重复打开;write函数的功能包括:向pDat写入指定数据;close函数功能包括:DeviceOpen--;内核消息确认关闭。
2用户程序头文件头文件仅包括两个函数int led_on(int)int led_off(int)分别实现LED的点亮与熄灭。
自定义的这两个函数通过传递参数的方式调用write(),写报告时想到之前做图形接口实验时用到的函数mmap,可以将内核空间映射到用户空间,如果用这种方法应该也可以实现效果。
3用户主程序主程序比较简单,即通过对led_on和led_off的调用,实现LED的亮灭。
led_on(1);usleep(500000);led_on(3);usleep(500000);led_off(1);链接头文件编译后,按如下顺序操作:mknod设备节点,加载模块,执行main文件。
即可看到LED1亮,LED3亮,LED1灭的效果。
六实验体会、小结及建议这次实验主要完成的是对LED灯的控制,我将其与单片机控制IO口比较异同。
两者相似的地方在于,将对IO接口、寄存器等的控制看作对内存地址的读写,事实上IO接口的本质就是控制寄存器完成某一功能。
两者区别在于,单片机没有内核空间与用户空间的概念,就像自动取得最高权限,可以对硬件地址直接操作一样。
下面是MSP430F16X系列的头文件截图下面是同为ARM内核的STM32F10X系列头文件截图下面是同为三星公司的ARM9架构的S3C2440头文件截图所以一般设备驱动编写流程可以看作先将硬件资源映射到内核空间,然后就可以像用单片机写驱动一样操作,但要注意为用户空间提供接口。
我猜想,是否可以继续用mmap映射到用户空间,然后将单片机程序稍作修改完成设备控制?七参考文献《微处理器与嵌入式系统》南京大学《嵌入式系统X210V3实验指导书》南京大学。