模糊C均值聚类
模糊C均值聚类算法
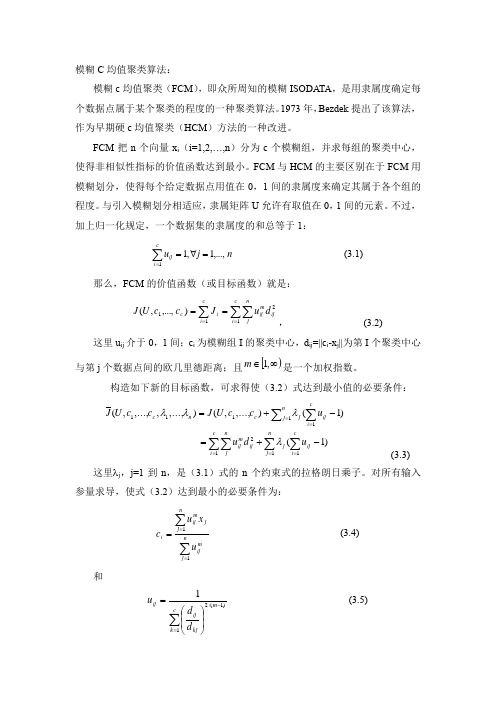
模糊C 均值聚类算法:模糊c 均值聚类(FCM ),即众所周知的模糊ISODATA ,是用隶属度确定每个数据点属于某个聚类的程度的一种聚类算法。
1973年,Bezdek 提出了该算法,作为早期硬c 均值聚类(HCM )方法的一种改进。
FCM 把n 个向量x i (i=1,2,…,n )分为c 个模糊组,并求每组的聚类中心,使得非相似性指标的价值函数达到最小。
FCM 与HCM 的主要区别在于FCM 用模糊划分,使得每个给定数据点用值在0,1间的隶属度来确定其属于各个组的程度。
与引入模糊划分相适应,隶属矩阵U 允许有取值在0,1间的元素。
不过,加上归一化规定,一个数据集的隶属度的和总等于1:∑==∀=c i ij n j u1,...,1,1 (3.1)那么,FCM 的价值函数(或目标函数)就是:∑∑∑====c i n j ijm ij c i i c d u J c c U J 1211),...,,(, (3.2)这里u ij 介于0,1间;c i 为模糊组I 的聚类中心,d ij =||c i -x j ||为第I 个聚类中心与第j 个数据点间的欧几里德距离;且[)∞∈,1m 是一个加权指数。
构造如下新的目标函数,可求得使(3.2)式达到最小值的必要条件: ∑∑∑∑∑∑=====-+=-+=n j c i ij j c i n j ijmij n j ci ij j c n c u d u u c c U J c c U J 111211111)1()1(),...,,(),...,,,...,,(λλλλ (3.3)这里λj ,j=1到n ,是(3.1)式的n 个约束式的拉格朗日乘子。
对所有输入参量求导,使式(3.2)达到最小的必要条件为:∑∑===nj m ijn j j m ij i u x uc 11(3.4) 和∑=-⎪⎪⎭⎫ ⎝⎛=c k m kj ij ij d d u 1)1/(21(3.5)由上述两个必要条件,模糊c均值聚类算法是一个简单的迭代过程。
模糊 c 均值算法
模糊c 均值算法
模糊c均值算法,也叫Fuzzy C Means算法,是一种无监督的聚类算法。
与传统的聚类算法不同的是,模糊C均值算法允许同一样本点被划分到不同的簇中,而且每个样本点到各个簇的距离(或者说相似度)用模糊数表示,因而能更好地处理样本不清晰或重叠的情况。
模糊c均值算法的步骤如下:
1. 初始化隶属度矩阵U,每个样本到每个簇的隶属度都为0-1之间的一个随机数。
2. 计算质心向量,其中每一项的值是所有样本的对应向量加权后的和,权重由隶属度矩阵决定。
3. 根据计算得到的质心向量计算新的隶属度矩阵,更新每个样本点到每个簇的隶属度。
4. 如果隶属度矩阵的变化小于一个预先设定的阈值或者达到了最大迭代次数,则停止;否则,回到步骤2。
模糊c均值算法是一种迭代算法,需要进行多次迭代,直到满足一定的停止条件。
同时,该算法对于隶属度矩阵的初始值敏感,不同的初始值可能会导致不
同的聚类结果。
关于模糊c均值聚类算法
FCM模糊c均值1、原理详解模糊c-均值聚类算法fuzzy c-means algorithm (FCMA)或称(FCM)。
在众多模糊聚类算法中,模糊C-均值(FCM)算法应用最广泛且较成功,它通过优化目标函数得到每个样本点对所有类中心的隶属度,从而决定样本点的类属以达到自动对样本数据进行分类的目的。
聚类的经典例子然后通过机器学习中提到的相关的距离开始进行相关的聚类操作经过一定的处理之后可以得到相关的cluster,而cluster之间的元素或者是矩阵之间的距离相对较小,从而可以知晓其相关性质与参数较为接近C-Means Clustering:固定数量的集群。
每个群集一个质心。
每个数据点属于最接近质心对应的簇。
1.1关于FCM的流程解说其经典状态下的流程图如下所示集群是模糊集合。
一个点的隶属度可以是0到1之间的任何数字。
一个点的所有度数之和必须加起来为1。
1.2关于k均值与模糊c均值的区别k均值聚类:一种硬聚类算法,隶属度只有两个取值0或1,提出的基本根据是“类内误差平方和最小化”准则,进行相关的必要调整优先进行优化看是经典的欧拉距离,同样可以理解成通过对于cluster的类的内部的误差求解误差的平方和来决定是否完成相关的聚类操作;模糊的c均值聚类算法:一种模糊聚类算法,是k均值聚类算法的推广形式,隶属度取值为[0 1]区间内的任何数,提出的基本根据是“类内加权误差平方和最小化”准则;这两个方法都是迭代求取最终的聚类划分,即聚类中心与隶属度值。
两者都不能保证找到问题的最优解,都有可能收敛到局部极值,模糊c均值甚至可能是鞍点。
1.2.1关于kmeans详解K-means算法是硬聚类算法,是典型的基于原型的目标函数聚类方法的代表,它是数据点到原型的某种距离作为优化的目标函数,利用函数求极值的方法得到迭代运算的调整规则。
K-means算法以欧式距离作为相似度测度,它是求对应某一初始聚类中心向量V最优分类,使得评价指标J最小。
模糊c均值聚类算法及应用
模糊c均值聚类算法及应用随着数字化时代的到来,数据量的增加让人们变得更加注重数据分析与聚类。
相比较传统的聚类算法,模糊c 均值聚类算法在实际应用中的效果更加出色。
本文将对模糊c均值算法进行详细介绍,并且剖析其在实际应用中的优势。
一、什么是模糊c均值聚类算法模糊c均值聚类算法是一种基于物理学中的隶属度理论,来对不同种类数据进行分类的一种算法。
其基本原理是通过计算不同数据在所属类别中的隶属程度,并根据不同的权重来计算数据的均值和方差,从而实现对数据进行分类的目的。
在传统的c均值聚类算法中,所有的数据点都必须完全属于某一个类别中,而在模糊c均值聚类算法中,一个数据点可以属于多个不同的类别,且归属于每个类别的隶属度都是按照百分比计算的。
换句话说,每个数据点都有可能属于多个不同的类别,且在不同类别中的权重不同。
二、模糊c均值聚类算法的优势模糊c均值聚类算法在大量实验中都取得了理想的效果。
其优势主要有以下几个方面:1.能够适应不同数据的分布情况在聚类分析中,很多数据不是严格遵循正态分布等统计规律的,这就使得传统的c均值聚类算法很难准确分类。
然而,采用模糊c均值算法处理这些数据时,可以很好地适应多样性的数据分布。
2. 更准确地表达数据之间的联系在实际应用中,很多数据点不仅需要分类,还要进行关联性分析。
在传统的c均值聚类算法中,只能体现点与点之间的距离远近,很难准确刻画数据之间的关联关系。
而在模糊c均值聚类算法中,可以很好地给每个点进行加权处理,使得每个点被分类后能更加准确地表达和传达其所代表的信息。
3. 更加灵活的聚类动态传统的c均值聚类所表现出来的聚类动态,很难被实时地调整。
而模糊c均值聚类算法中,每个数据点都有一定的隶属度,可以更加灵活地调整聚类动态。
使用模糊c 均值求解,总是能得到的比传统c均值聚类更加的平滑,不容易受到某些噪音的干扰,更能够优化每个点的分类。
三、模糊c均值聚类算法的应用1. 人脸识别在人脸识别领域,模糊c均值算法可以有效地应用于人脸的分类和特征提取。
模糊C均值聚类算法实现与应用
模糊C均值聚类算法实现与应用聚类算法是一种无监督学习方法,在数据挖掘、图像处理、自然语言处理等领域得到广泛应用。
C均值聚类算法是聚类算法中的一种经典方法,它将数据对象划分为若干个不相交的类,使得同一类中的对象相似度较高,不同类之间的对象相似度较低。
模糊C均值聚类算法是对C均值聚类的扩展,它不是将每个数据对象划分到唯一的类别中,而是给每个对象分配一个隶属度,表示该对象属于不同类的可能性大小。
本文主要介绍模糊C均值聚类算法的实现方法和应用。
一、模糊C均值聚类算法实现方法模糊C均值聚类算法可以分为以下几个步骤:1. 确定聚类数k与参数m聚类数k表示将数据分成的类别数目,参数m表示隶属度的度量。
一般地,k和m都需要手动设定。
2. 随机初始化隶属度矩阵U随机初始化一个k×n的隶属度矩阵U,其中n是数据对象数目,U[i][j]表示第j个对象隶属于第i个类别的程度。
3. 计算聚类中心计算每个类别的聚类中心,即u[i] = (Σ (u[i][j]^m)*x[j]) / Σ(u[i][j]^m),其中x[j]表示第j个对象的属性向量。
4. 更新隶属度对于每个对象,重新计算它对每个类别的隶属度,即u[i][j] = 1 / Σ (d(x[j],u[i])/d(x[j],u[k])^(2/(m-1))),其中d(x[j],u[i])表示第j个对象与第i个聚类中心的距离,k表示其他聚类中心。
5. 重复步骤3和4重复执行步骤3和4,直到满足停止条件,例如聚类中心不再变化或者隶属度矩阵的变化趋于稳定。
二、模糊C均值聚类算法应用模糊C均值聚类算法可以应用于多个领域,包括图像处理、文本挖掘、医学图像分析等。
下面以图像分割为例,介绍模糊C均值聚类算法的应用。
图像分割是图像处理中的一个重要应用,旨在将一幅图像分割成多个区域,使得同一区域内的像素具有相似度较高,不同区域之间的像素相似度较低。
常见的图像分割算法包括全局阈值法、区域生长法、边缘检测法等。
模糊c均值聚类算法
模糊c均值聚类算法C均值聚类算法(C-Means Clustering Algorithm)是一种常用的聚类算法,目的是将一组数据点分成若干个类群,使得同一类群内的数据点尽可能相似,不同类群之间的数据点尽可能不相似。
与K均值聚类算法相比,C均值聚类算法允许一个数据点属于多个类群。
C均值聚类算法的基本思想是随机选择一组初始聚类中心,然后通过迭代的方式将数据点分配到不同的类群,并调整聚类中心,直到满足停止条件。
算法的停止条件可以是固定的迭代次数,或者是聚类中心不再改变。
具体而言,C均值聚类算法的步骤如下:1.随机选择k个初始聚类中心,其中k是预先设定的类群数量。
2.根据欧氏距离或其他距离度量方法,计算每个数据点到每个聚类中心的距离。
3.将每个数据点分配到距离最近的聚类中心的类群。
4.根据聚类中心的分配情况,更新聚类中心的位置。
如果一个数据点属于多个类群,则根据各个类群的权重计算新的聚类中心位置。
5.重复步骤2到4,直到满足停止条件。
C均值聚类算法的优点是灵活性高,可以允许一个数据点属于多个类群。
这在一些应用场景中非常有用,例如一个商品可以属于多个类别。
然而,C均值聚类算法的缺点是计算复杂度较高,对初始聚类中心的选择敏感,以及类群数量k的确定比较困难。
为了解决C均值聚类算法的缺点,可以采用如下方法进行改进:1.使用聚类效度指标来评估聚类结果的好坏,并选择最优的聚类中心数量k。
2. 采用加速算法来减少计算复杂度,例如K-means++算法可以选择初始聚类中心,避免随机选择的可能不理想的情况。
3.对数据进行预处理,例如归一化或标准化,可以提高算法的收敛速度和聚类质量。
4.针对特定应用场景的需求,可以根据数据属性来调整聚类中心的权重计算方式,以适应特定的业务需求。
总结起来,C均值聚类算法是一种常用的聚类算法,与K均值聚类算法相比,它可以允许一个数据点属于多个类群。
然而,C均值聚类算法也存在一些缺点,例如计算复杂度高,对初始聚类中心的选择敏感等。
模糊c均值聚类算法的概念

模糊c均值聚类算法的概念
模糊C均值聚类算法(Fuzzy C-means clustering algorithm,简
称FCM)是一种基于模糊理论的聚类算法,用于将数据集划
分为若干个模糊的子集,每个子集代表一个聚类。
FCM算法的目标是最小化数据点与聚类中心之间的模糊距离。
模糊距离所描述的是一个数据点属于每个聚类的可能性,而不仅仅是属于一个特定聚类的二进制标识。
FCM算法的步骤如下:
1. 初始化聚类中心,可以随机选择数据点作为初始中心。
2. 根据初始聚类中心,计算每个数据点对于每个聚类中心的成员关系度(即属于每个聚类的可能性)。
3. 根据成员关系度更新聚类中心,计算每个聚类中心的坐标。
4. 重复步骤2和3,直到聚类中心不再发生变化或达到最大迭
代次数。
在每次迭代中,FCM算法根据每个数据点到聚类中心的距离
计算其模糊隶属度,按照隶属度对数据点进行聚类。
每个数据点隶属于每个聚类的可能性是在0到1之间连续变化的,表示了数据点与每个聚类之间的相似程度。
相比于传统的硬聚类算法,模糊C均值聚类算法允许数据点
属于多个聚类,更好地处理了数据点的模糊性,适用于数据集中存在重叠样本或不确定性较高的场景。
模糊 c 均值聚类算法
模糊 c 均值聚类算法模糊 c 均值聚类算法是一种常用的聚类算法,其特点是能够解决数据集中存在重叠现象的问题,适用于多类别分类和图像分割等领域。
本文将从算法原理、应用场景、优缺点等方面分析模糊c 均值聚类算法。
一、算法原理模糊 c 均值聚类算法与传统的聚类算法相似,都是通过对数据集进行聚类,使得同一类的数据样本具有相似的特征,不同类的数据样本具有不同的特征。
但是模糊c 均值聚类算法相对于传统的聚类算法而言,其对于数据集中存在重叠现象具有一定的优越性。
模糊 c 均值聚类算法的主要思想是:通过迭代计算,确定数据集的类别个数,并计算每个数据样本属于不同类别的概率值。
在此基础上,通过计算每个聚类中心的权值,并对每个数据样本属于不同类别的概率进行调整,以达到数据样本的合理分类。
二、应用场景模糊 c 均值聚类算法的应用范围较广,主要包括:1.多类别分类:在多类别分类中,不同的类别往往具有比较明显的特征区别,但是存在一些数据样本的特征存在重叠现象。
此时,模糊 c 均值聚类算法可以对这些数据样本进行合理分类。
2.图像分割:在图像分割过程中,一张图片包含了不同的对象,这些对象的特征往往具有一定的相似性。
模糊 c 均值聚类算法可以通过对这些相似的特征进行分类,实现对于图像的自动分割。
3.市场分析:在市场分析中,需要根据一定的统计规律,对市场中的产品进行分类。
模糊 c 均值聚类算法可以帮助市场研究人员实现对市场中产品的自动分析分类。
三、优缺点分析模糊 c 均值聚类算法相对于传统的聚类算法而言,其对于数据集中存在重叠现象具有一定的优越性,具体优缺点如下所示:1.优点:(1) 能够有效地解决重叠现象问题,在多类别数据分类和图像分割等领域具有比较好的应用前景。
(2) 通过迭代计算,能够实现对数据集的自动分类,自动化程度高。
2.缺点:(1) 算法的时间复杂度比较高,需要进行多次迭代计算,因此在数据量较大时,运算时间比较长。
(2) 模糊 c 均值聚类算法对于初始聚类中心的选择较为敏感,不同的聚类中心初始化可能会导致最终分类效果的不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主 单
讲:周润景 教授 位:电子信息工程学院
目 录
模糊C均值聚类应用背景 模糊C均值算法 模糊C均值聚类的MATLAB实现 模糊C均值聚类结果分析
一.模糊C均值聚类应用背景
传统的聚类分析是一种硬划分(Crisp Partition),它把每个待辨识的对 象严格地划分到某类中,具有“非此即彼”的性质,因此这种类别划分的界限 是分明的。然而实际上大多数对象并没有严格的属性,它们在性质和类属方面 存在着中介性,具有“亦此亦彼”的性质,因此适合进行软划分。Zadeh提出 的模糊集理论为这种软划分提供了有力的分析工具,人们开始用模糊方法来处 理聚类问题,并称之为模糊聚类分析。模糊聚类得到了样本属于各个类别的不 确定性程度,表达了样本类属的中介性,建立起了样本对于类别的不确定性的
三.模糊C均值聚类的MATLAB实现
426.31 3105.29 2057.8 1507.13 1556.89 1954.51 343.07 3271.72 2036.94 2201.94 3196.22 935.53 2232.43 3077.87 1298.87 1580.1 1752.07 2463.04 1962.4 1594.97 1835.95 1495.18 1957.44 3498.02 1125.17 1594.39 2937.73 24.22 3447.31 2145.01 1269.07 1910.72 2701.97 1802.07 1725.81 1966.35 1817.36 1927.4 2328.79 1860.45 1782.88 1875.13]; [center,U,obj_fcn] = fcm(data,4); plot3(data(:,1),data(:,2),data(:,3),'o');
三.模糊C均值聚类的MATLAB实现
2297.28 2092.62 1418.79 1845.59 2205.36 2949.16 1692.62 1680.67 2802.88 172.78 2063.54 1449.58 1651.52 341.59 291.02 237.63 3340.14 3177.21 1775.89 1918.81 3243.74 3244.44 1867.5 1575.78 3017.11 3084.49 3199.76 1641.58 1713.28 3076.62 3095.68 3077.78 535.62 584.32 2772.9 2226.49 1202.69 662.42 2108.97 1725.1 1984.98 2328.65 1257.21 3405.12 1570.38 2438.63 2088.95 2251.96
三.模糊C均值聚类的MATLAB实现
注意:在使用上述方法时,要根据中心坐标Center的特点分清楚每一类中 心所代表的实际中的哪一类,然后才能准确地将待聚类的各方案准确地分为各 自所属的类别;否则,就会出现张冠李戴的现象。 2)MATLAB图形显示聚类模式 使用命令[center,U,obj_fcn] = fcm(data,4)进行聚类后,可调用MATLAB 图形窗口显示聚类结果,命令格式如下: maxU=max(U); %最大隶属度
三.模糊C均值聚类的MATLAB实现
1702.8 1877.93 867.81 1831.49 460.69 2374.98 2271.89 1783.64 198.83 1494.63 1597.03 1598.93 1243.13 2336.31 354 2144.47 1639.79 1860.96 2334.68 1713.11 3274.77 3346.98 3482.97 1597.99 3250.45 2072.59 1921.52 1921.08 1814.07 2640.26 3300.12 2501.62 2068.74 1975.3 2535.1 1604.68 2172.99 975.31 946.7 2261.31 2445.08 2550.51 2126.76 1623.33 3441.07 1599.63 2373.61 591.51
描述,能更客观地反映现实世界,从而成为聚类分析研究的主流。
在基于目标函数的聚类算法中模糊 C均值(FCM,Fuzzy C—Means)类 型算法的理论最为完善,应用最为广泛。
二.模糊C均值算法
1.模糊C均值聚类的准则
i
设 x (i 1,2,...,n) 是n个样本组成的样本集合,c为预定的类别数目, (x )
四.模糊C均值聚类结果分析
运行MATLAB程序,数据的模糊C均值聚类分析数据如下:
Iteration count = 1, obj. fcn = 28484303.583307 Iteration count = 2, obj. fcn = 22894174.219903 Iteration count = 3, obj. fcn = 22492974.034424 Iteration count = 4, obj. fcn = 20879539.602697 Iteration count = 5, obj. fcn = 14444987.068964 Iteration count = 6, obj. fcn = 8322567.664727 Iteration count = 7, obj. fcn = 7551351.839018 Iteration count = 8, obj. fcn = 7439273.677928 Iteration count = 9, obj. fcn = 7421451.003657 Iteration count = 10, obj. fcn = 7417960.721127 Iteration count = 11, obj. fcn = 7417133.213718 Iteration count = 12, obj. fcn = 7416918.432660 Iteration count = 13, obj. fcn = 7416860.845351 Iteration count = 14, obj. fcn = 7416845.240472 Iteration count = 15, obj. fcn = 7416840.997724
index1 = find(U(1,:) == maxU)
index2 = find(U(2,:) == maxU) index3 = find(U(3,:) == maxU)
%找到属于第一类的点
%找到属于第二类的点 %找到属于第三类的点
index4 = find(U(4,:) == maxU)
三.模糊C均值聚类的MATLAB实现
1.重要程序代码
这里对酒瓶颜色进行分类。下面介绍其重要程序代码: 1)MATLAB模糊C均值数据聚类识别函数
在MATLAB中(b=2),只要直接调用如下程序即可实现模糊 C均值聚类:
[Center,U,obj_fcn]=fcm(data,cluster_n) data:要聚类的数据集合,每一行为一个样本; cluster_n:聚类数; Center:最终的聚类中心矩阵,每一行为聚类中心的坐标值; U:最终的模糊分区矩阵; obj_fcn:在迭代过程中的目标函数值。
1 / b 1
1 / b 1
二.模糊C均值算法
用当前的隶属度函数按下式更新计算各类聚类中心:
i 1 n
m
j
( x ) x ( x )
b j i n b i 1 j i
i
当模糊 C均值算法收敛时,就得到了各类的聚类中心和各个样本对于各类的 隶属度值,从而完成了模糊聚类划分。如果需要,还可以将模糊聚类结果进行解 模糊,即用一定的规则把模糊聚类划分转化为确定性分类。
line(data(index4,1),data(index4,2),data(index4,3),'linestyle','none','marke
r','+','color','y');
三.模糊C均值聚类的MATLAB实现
2. MATLAB实现模糊C均值聚类完整程序
clear all; data=[1739.94 1675.15 373.3 3087.05 1756.77 1652 864.45 1647.31 222.85 3059.54 877.88 2031.66 1803.58 1583.12 2352.12 2557.04 401.3 3259.94 363.34 3477.95 1571.17 1731.04 104.8 3389.83 499.85 3305.75 2395.96 2429.47 1514.98 2665.9 2002.33 3071.18 2163.05 1411.53 2150.98 2462.86 1735.33 2421.83 2196.22
j i
是第i个样本对于第j类的隶属度函数。用隶属度函数定义的聚类损失函数
可以写为
J ( x ) x m
c n b f j 1 i 1 j i i
2
j
其中,b>1,是一个可以控制聚类结果的模糊程度的常数。
在不同的隶属度定义方法下最小化聚类损失函数,就得到不同的模糊
聚类方法。其中最有代表性的是模糊C均值方法,它要求一个样本对于各 个聚类的隶属度之和为1,即:
二.模糊C均值算法
(2)初始化各个聚类中心
m:
i
1 m N
i
yi i
y
式中,Ni是第i聚类