OV6620 OV720摄像头YUV RGB格式说明
V6621-L 和 V6622-L 系列 室内防暴彩色 日夜转换型网络半球摄像机说明书

吸顶装表面装 吊装产品描述V6621-L 和V6622-L 系列室内防暴彩色/日夜转换型网络半球摄像机采用新型的SONY 1/3"彩色EX-view CCD 图像传感器,利用先进的数字信号处理技术对图像进行处理,具有高解析度、高灵敏度、低照度和高信噪比特点。
V6622-L 系列独有的红外线截止滤镜开关功能可以视日夜光线环境变化情况自动切换。
V6621-L 和V6622-L 系列室内防暴彩色/日夜转换型网络半球摄像机通过10/100M Base-T 网络,将模拟视频信号转换为数字视频传输到视频接收端,实现网络视频传输的功能。
网络远程控制功能不仅能让相关软件对网络半球的IP 地址进行搜索,还能通过IE 浏览器对IP 地址、子网掩码、网关进行设置,也能对视频编码进行设置,如预设编码参量,数据传输率,画质等。
通过QoS 的网络服务类型选择,用户可以获得最适合自己的服务方式。
产品特点y SONY 1/3" EX-view CCD 传感器y 全天候防护型设计,采用防暴半球型防护罩,坚固外壳 y 可在水平、垂直、轴向三个旋转方向上调节摄像机角度 y 支持MPEG-4编码,实时传输视频图像y 像素: NTSC(EIA)=380K/PAL(CCIR)=440K(高分辨率) y 520TVL 高解析度,高灵敏度,抑制光晕能力强和高信噪比 y 自动电子快门(AES),自动增益控制(AGC),自动光圈(AI),自动白平衡(AWB),背光补偿(BLC)y 自动红外截止滤光片,彩色/黑白模式自动切换(V6622-L) y 内置非球面红外校正变焦镜头,自动光圈y 支持多用户通过Web server 或V2216等软件进行实时访问 y 用户密码保护,防止非法修改系统参数 y 支持手动设置IP 地址 y 支持动态I-P 画格比率 y 支持动态调整质量与压缩率 y 图像抓拍功能 y 支持移动侦测y 软件网络远程升级,提供网络QoS 的服务类型选择功能 y 支持PoE/12VDC/24VAC 供电 y 外形美观,安装使用简便订购信息V6621-L3010RB 1/3" 室内防暴彩色网络半球摄像机(内置2.5-6mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,PAL ,防暴, 吸顶装,透明球罩,PoE)V6621-L3010RE 1/3" 室内防暴彩色网络半球摄像机(内置3.3-12mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)V6622-L3010RB 1/3" 室内防暴日夜转换型网络半球摄像机(内置2.5-6mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,黑白模式0.01Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)V6622-L3010RE 1/3" 室内防暴日夜转换型网络半球摄像机(内置3.3-12mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,黑白模式0.01Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)注意:1. 若上述配置下选用NTSC 制, 请将后缀L3010改为L3000。
因菲诺瓦v6621-m系列室内防破坏彩色ip迷你球摄像机说明书
Infinova·51StoutsLane,MonmouthJunction,NJ08852USA··Toll-freeUS:1-888-685-2002·Tel:1-732-355-9100·Fax:1-732-355-9101·E-mail:******************Specifications and appearance are subject to change without notice 9 February 2010Indoor Vandal Resistant Color IP Minidome CameraDESCRIPTIONInfinova’s V6621-M series indoor vandal resistant color IP minidome camera features a high resolution 1/3" SONY CCD sensor and the state-of-the-art network video encoding technology. This series, with its real time image collecting system, offers evidentiary-quality image across all lighting conditions, applicable for offices, shopping malls, airports, warehouses, city streets and other surveillance applications. V6621-M series IP minidome camera deploys advanced videoencoding technology, available with both MPEG-4 and MJPEG format. This unique design allows users to select the desired compression format for storage or live view based on the network bandwidth.Bi-directional audio not only enables audible sound in the surveillance field, but also over the intercom. It also features programmable motion detection and an SD card for front information storage. It can automatically record if any alarm occurs, and support manual recording as well as automatic recording when network anomaly, which ensures the high security of your surveillance system. The standard API interface is easy to incorporate with the video surveillance software.V6621-M series employs vandal resistant dome housing, making it the ideal choice for the hazardous surveillance environments. The camera provides easy installation, designed for surface, pendant or recessed mount with 3-axis adjustment.FEATURESy 1/3" SONY EX-view CCD sensory MPEG-4/MJPEG dual video encoding y Dual stream encoding y High frame rate outputy Bi-directional audio (optional) y Motion detection y Privacy masky Alarm function (optional)ySupports multiple ways to handle alarms, such as sending an email, FTP upload, audible alarm, SD storage (trigger recording), relay outputy Compatible with TCP/IP , HTTP , ICMP , PPPoE, DHCP , UDP , DNS, DDNS, SMTP , RTP , RTSP , SNMP , ARP protocolsy Supports QoS Settings, providing excellent video transmission and quality service y Upgrade onliney View and control cameras via Web server, Infinova V2216 and leading Network Video Management software packages y Aspherical, auto-iris, vari-focal lens with IR correction y Digital Signal Processor (DSP) for high quality imagey High resolution, low smear, high anti-blooming, and high S/N ratio y Excellent Low Light SensitivityyAuto Electronic Shutter (AES), Auto Gain Control (AGC), Auto White Balance/Manual White Balance (ATW/MWB), Backlight Compensation (BLC), Flickerless (F .L.)y Surface, pendant or recessed mount, Vandal Resistant, 3-axis adjustmentyPoE/12VDC/24VAC power supplyORDERING INFORMATIONV6621-M5010SE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, PAL, Clear, VR, Surface, Indoor, PoEV6621-M5010SEW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, PAL, Clear, VR, Surface, Indoor, with Audio/Alarm, PoE V6621-M5000SE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, NTSC, Clear, VR, Surface, Indoor, PoEV6621-M5000SEW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, NTSC, Clear, VR, Surface, Indoor,with Audio/Alarm, PoEV6621-M5010PE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, PAL, Clear, VR, Pendant, Indoor, PoEV6621-M5010PEW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, PAL, Clear, VR, Pendant, Indoor, with Audio/Alarm, PoE V6621-M5000PE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, NTSC, Clear, VR, Pendant, Indoor, PoEV6621-M5000PEW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, NTSC, Clear, VR, Pendant, Indoor,with Audio/Alarm, PoEV6621-M5010RE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG,PAL, Clear, VR, Recessed, Indoor, PoEV6621-M5010REW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG, PAL, Clear, VR, Recessed, Indoor,with Audio/Alarm, PoEV6621-M5000RE IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG,NTSC, Clear, VR, Recessed, Indoor, PoEV6621-M5000REW IP Minidome, 3.3-12mm, Color, MPEG-4/MJPEG,NTSC, Clear, VR, Recessed, Indoor, with Audio/Alarm, PoEMounts for pendant mount model: V1761MS Wall Mount, 6" V1762MS Corner Mount (contain adapter), 6" V1763MS Pole Mount (contain adapter), 6" V1764 Pendent Mount, Indoor, 15" long, verticalSD card model: V3096-4G SD card, 4G V3096-8G SD card, 8G V3096-16GSD card, 16GIndoor vandal resistant color IP minidome camera MPEG-4/MJPEG compression, with vari-focal lensSurface mount Pendant mount Recessed mountInfinova ·51StoutsLane,MonmouthJunction,NJ08852USA··Toll-freeUS:1-888-685-2002·Tel:1-732-355-9100·Fax:1-732-355-9101·E-mail:******************Specifications and appearance are subject to change without notice 10 February 2010Indoor Vandal Resistant Color IP Minidome CameraSurface mount Pendant Recessed V6621-M Series 1/3" SONY Ex-view CCD ***********(25IRE,AGCON), NTSC: 1/60~1/100,000s, PAL: 1/50~1/100,000s F1.4, f=3.3-12mmX (Panning): 0°~340°; Y (Tilting): 0°~80°; Z (Rotating): 0°~340° NTSC/PAL MPEG-4 / MJPEG NTSC: 30 fps; PAL: 25 fps 128KBit/s~4MBit/s AvailableMajor stream: D1/2CIF/CIF/QCIF; Minor stream: CIF/QCIF Audio Compression: G.7111 Input (Linear Level, Resistance: 1 kOhm) 1 Output (Linear Level, Resistance: 600 Ohm) Available Available Available Available1 RJ45 10/100M self-adaptive Ethernet port, HTTP , DNS, DDNS, SMTP , SNMP , ARP 1 alarm input, 1 relay output。
深圳英飞拓 V6202-G 系列 百万像素低照度网络摄像机 说明书

注意版权声明本手册内容(包括文字与图片)的版权为Infinova公司所有。
任何个人或法人实体,未经Infinova公司的书面授权许可,不得以任何形式对其内容进行翻译、修改或改编。
违者将追究其法律责任。
Infinova公司保留在事先不进行任何通知的情况下,对本手册的内容以及产品技术规格进行修改的权利,以便向用户提供最新、最先进的产品。
用户可从Infinova公司的网站上获得最近的产品更新资料。
商标权声明Infinova®为Infinova公司的注册商标,Infinova公司拥有法定的商标权。
本安装使用手册中可能使用到其它商标,其商标权属于其合法所有者拥有。
FCC 警告V6202-G系列百万像素低照度网络摄像机符合FCC规则第15条之规定。
设备运行符合以下两个条件:z设备的运行不会产生有害的干扰;z设备的运行在一定程度上不受外部干扰,甚至是不良干扰的影响。
V6202-G系列百万像素低照度网络摄像机经过检测,完全符合FCC规则第15条中关于A类电子设备的规定。
这些限制性规定用于保证设备使用时,在一定程度上,运行不会受外部干扰的影响。
该设备为电磁设备,因此需严格按照本手册说明进行安装和使用,否则有可能对无线电通讯产生干扰。
同时,特定环境下的安装无法保证完全杜绝干扰。
在准备做系统接线或操作之前,请认真阅读本手册,并妥善保管好本手册,以便将来查阅。
重要安全建议与警告:z仔细阅读并妥善保存好本手册; z产品内部无用户服务部件,一般用户请勿打开产品外盖; z不要将本产品放置于靠近水源、火源及高强度电磁辐射的地方; z请保持本产品周围良好的通风环境。
z擦拭本产品表面时,请使用干燥、柔软的抹布。
z在长时间不使用本产品时建议拨下电源插头; z本产品只可使用由生产厂家推荐的辅助设备及备件; z 请放置好电源及与本产品所连接的所有线缆,注意不可放置于地下或人经常活动的地方;z 有关产品维修方面的问题,请咨询专业人员,切勿擅自打开外盖进行维修;z 请妥善保管好产品包装箱,方便设备的转移或搬运。
OV使用说明和程序讲解

OV使用说明和程序讲解OV是一个非常强大的开源计算机视觉库,用于图像处理、目标检测、分割和识别等任务。
它的使用说明和程序讲解将围绕以下几个方面展开:安装、导入、基本功能、目标检测和图像分割。
一、安装要使用OV,首先需要安装它的Python库。
可以使用pip命令来安装:```pythonpip install opencv-python```安装完成后,可以导入ov库开始使用。
二、导入导入OV库的语法如下:```pythonimport cv2 as ov```这样就可以开始使用OV库的所有功能。
三、基本功能OV提供了许多基本图像处理功能,包括读取和显示图像、调整大小、旋转和翻转等。
1.读取图像:```pythonimage = ov.imread('image.jpg')```2.显示图像:```pythonov.imshow('Image', image)ov.waitKey(0)```3.调整大小:```pythonresized_image = ov.resize(image, (new_width, new_height)) ```4.旋转图像:```pythonrotation_matrix = ov.getRotationMatrix2D((image_width / 2, image_height / 2), rotation_angle, scale)rotated_image = ov.warpAffine(image, rotation_matrix, (image_width, image_height))```5.翻转图像:```pythonflipped_image = ov.flip(image, flip_code)```四、目标检测OV还提供了目标检测的功能,可以在图像中检测出特定目标的位置和边界框。
1.加载目标检测器:```pythondetector = ov.CascadeClassifier('cascade.xml')```2.检测目标:```pythonobjects = detector.detectMultiScale(image, scaleFactor, minNeighbors, flags, minSize, maxSize)for (x, y, width, height) in objects:ov.rectangle(image, (x, y), (x + width, y + height), (0, 255, 0), 2)```五、图像分割OV还可以进行图像分割,将图像分成多个区域,以便进一步分析和处理。
ov6620 详细操作说明

Whut_wj 的小店:/专门提供摄像头 系统板 BDM 芯片OV6620 的使用说明(V1.1)今年的比赛虽然光电的算法做得很好,速度有很好地提升,但是代价也是相当大的.不少组 队在提高光电功率以增大有效检测距离和提高光电抗干扰性能上付出巨大的努力.但目前流 行的检测方法已以伸展到光电和摄像头信息融合的层次了.而不少队伍用光电和摄像头配合 主要是为了完成起始线检测,主要是因为单独用模拟摄像头的检测成功率较低。
而用 OV6620 必定可以解决这一问题。
摄像头的优势是信息量大,前瞻性好,对极限速度的提高必须用好摄像头,这一点是毋 庸置疑的。
第一步是图像采集,第二步是图像处理。
但最有难度的是图像处理,包括图像去 噪,图像二值化,黑线提取以及寻迹算法。
图像去噪一般用时域里的处理方法或者形态学处取方法, 前者可用窗模板去野点, 后者 可以膨胀处理。
由于数字摄像头取点多(24MBUSCLK 下每行可取 150 个点) ,为了提高程 序的效率,可以先从大模板查有无噪声。
图像二值化现在越来越需要自适应选阈值的方法, 常规的自适应方法有双峰去,熵最大化法,阈值迭代法。
这是最最常用的三种方法,一些基 本的图像处理的文章都有写到。
不过,这里推荐用双峰法或边缘检测法(检测灰度跳变) , 因为它们的计算量相对较小, 而且改进之后的跟踪边缘检测法效率更高。
黑线提取以及寻迹 算法目前也有两种思路,一是直接算黑线离中心的偏移量,二是寻黑线的一些参数,如曲率 半径,弧线长等等。
没有特定的结果公式证明上述方法哪个好哪个不好,实践和调试最重要的。
好了,直入正题,直接说说 OV6620 的一些特点和运用的技巧,希望读者看完之后对 OV6620 有所了解,可以直接上手用。
一、 介绍一下数字摄像头 OV6620 的特征1)、OV6620 需要稳定的 5V 电压供电,和系统板上的供电电源兼容。
2)、NAL制,每秒25帧,一帧两场,那么每秒就有50场。
相机内部摄像头数据输出格式(转)

相机内部摄像头数据输出格式(转)原⽂转⾃对于彩⾊图像,需要采集多种最基本的颜⾊,如rgb三种颜⾊,最简单的⽅法就是⽤滤镜的⽅法,红⾊的滤镜透过红⾊的波长,绿⾊的滤镜透过绿⾊的波长,蓝⾊的滤镜透过蓝⾊的波长。
如果要采集rgb三个基本⾊,则需要三块滤镜,这样价格昂贵,且不好制造,因为三块滤镜都必须保证每⼀个像素点都对齐。
当⽤bayer格式的时候,很好的解决了这个问题。
bayer 格式图⽚在⼀块滤镜上设置的不同的颜⾊,通过分析⼈眼对颜⾊的感知发现,⼈眼对绿⾊⽐较敏感,所以⼀般bayer格式的图⽚绿⾊格式的像素是是r和g像素的和。
先看看⽹上的⼀种说法“摄像头的数据输出格式⼀般分为CCIR601、CCIR656、RAW RGB等格式”⼤嘴评述:这⾥的摄像头严格来说应该是传感器(sensor),个⼈觉得CCIR601和CCIR656更应该看做是⼀种标准和计算⽅式,⽽不应该是数据格式,这⾥我觉得有些误导,不必深究,具体关于CCIR601和CCIR656感兴趣的朋友请⾃⾏查阅资料,这⾥只做简单介绍。
⼀、Sensor的感光原理:Sensor的感光原理是通过⼀个⼀个的感光点对光进⾏采样和量化,但在Sensor中,每⼀个感光点只能感光RGB三基⾊中的⼀种颜⾊(这个颜⾊可以理解为像素的⼀个颜⾊分量,并不是最终的图像显⽰的颜⾊,最终图像显⽰的颜⾊是由RGB三个颜⾊分量组合构成,根据RGB三个颜⾊分量的值不同,组合成不同的颜⾊)。
所以,通常所说的30万像素或130万像素等,指的是有30万或130万个感光点,每⼀个感光点只能感光⼀种颜⾊。
⼆、CCIR601或656的格式要还原⼀个真正图像,需要每⼀个点都有RGB三种颜⾊,所以,对于CCIR601或656的格式,在Sensor模组的内部会有⼀个ISP模块,会将Sensor采集到的数据进⾏插值和特效处理,例如:如果⼀个感光点感应的颜⾊是R,那么,ISP模块就会根据这个感光点周围的G、B感光点的数值来计算出此点的G、B值,那么,这⼀点的RGB值就被还原了,然后在编码成601或656的格式传送给Host。
OV2640规格书
ShenZhen Hong Jia Guang Xian Technology Co.,Ltd 产品规格承认书SPECIFICATION FOR APPROVAL客户名称 (Customer Name):客户型号(Customer Number):泓嘉光显型号(SKT Number) : HDF3M-811报送日期 (Report Date) :供应商确认会签栏(Supplier sign):单位制作审核批准泓嘉光显签章客户承认会签栏(Customer sign):单位工程采购批准客户Customer签章客户意见ShenZhen Hong Jia Guang Xian Technology Co.,Ltd 1、主要规格ShenZhen Hong Jia Guang Xian Technology Co.,Ltd 2、产品结构图ShenZhen Hong Jia Guang Xian Technology Co.,Ltd3、功能检测表 1 测试标准(图1)(图2)(图3)(图4)深圳市泓嘉光显科技有限公司ShenZhen Hong Jia Guang Xian Technology Co.,Ltd4、可靠性测试NO测试项目测测试条件备注1高温存储温度:70℃时间:48 小时2低温存储温度:-30℃时间:48 小时试验完后,在常温常湿环境下放置2 小时后进行测试。
满足规格要求3高温使用温度:60℃时间:24 小时4低温使用温度:温度:-20℃时间:24 小时5高温高湿使用温度:60℃湿度:90%时间:24 小时6温度冲击试验温度(时间):-30C(30mm)←→70℃(30min)循环次数:10循环7振动测试频率:50HZ振幅:2mm方向:X,Y,Z 各2 小时8跌落试验跌落于混凝土。
高度:120cm方向:6 面放置于专用跌落治具或单体模式深圳市泓嘉光显科技有限公司ShenZhen Hong Jia Guang Xian Technology Co.,Ltd5、包装1. Every module is placed into a tray until all empty slots of a tray are filled. Each tray contains100 modules.2. Each tray use an anti-static bag to prevent the module from moisture by partially socking outthe air from the stack.3. A stack have five trays.4. Insert a stack into a inner box.6、注意事项:1.当我们拿起模组的时候必须小心模组被静电损坏。
OV6620有关的说明
OV6620有关的说明介绍一下数字摄像头OV6620的特征1)、OV6620需要稳定的5V电压供电,和系统板上的供电电源兼容。
2)、NAL制,每秒25帧,一帧两场,那么每秒就有50场。
意味着20MS就有一幅图像产生。
356x 292 pixels ,理解为:有292行,一行有356个点。
3)、视野和可视距离:这个和镜头的选择有关,f=3.6MM时视野应该有25度左右,f 越大视场.可视距离需要调节镜头对焦.经我测试可视距离可以看十几米,毕竟相素值只有10 万越小多,用单片机读可以看到3-4M的距离.这里解释一下为什么用单片机读会打折扣. 因为黑线宽度只有2.5CM,太远了黑线会很细,采点之后就分辩不出是噪声还是有用信号了. 在1米左右时, 黑线宽度可用8 个点表示.注:以上数据均是24MBUSCL下每行可取150个点时测得,没有翻转摄像头•4)、内部有IIC 可编程.可以调整摄像头的参数,比如最大灰度,对比度,暴光率控制等等. 其本质是SCC助议的寄存器写入,需要对摄像头做跳线处理,并用MCU勺I/O 口模拟SCC眇议.注:SCCB协议视作IIC协议,有些细微的差别•对IIC的写入,本文后面稍加说明• 5)、数据格式-YCrCb 4:2:2, GRB 4:2:2, RGB; 电子曝光/增益/白平衡控制;内部自动图像增强,亮度,对比度,伽马,饱和度,锐度,力卩窗等•最重要的是,不需AD,不需1881。
当然玩一下他的模拟输出一可以,VTO管脚就可以当普通模拟摄像头用.OV6620勺图像采集数字摄像头相对来说贵一些,他内部的信号处理比较复杂,接口也较多,一般是彩色的YUV信号,只取丫的亮度信号,所以用起来略有浪费•先看ov6620datasheet上的时序图:_ 刖帥Field ■切I L J Qtid Fiela:FODC-1)HREFValid DataHorlzontoi TirninnFOTJDHREF高为40u$,低为23uS饥lk为lltaS如果这个图还不明白的话看下面的说明PCLK遷L如果这个图还不明白的话看下面的这个图1、在采集时乎略TCLK首先是因为它太快了,捕捉不到,另外也没有必要捕捉到它。
高清网络摄像机使用说明书

尊敬的用户,因本机功能设置较为专业,使用前,请您仔细阅读本系统用户手册。
高清网络摄像机使用手册声明本手册可能在某些技术细节方面描述不够准确或存在印刷错误,假如您在使用过程中按照使用手册无法解决问题时,请致电我公司技术部垂询相关操作方法。
本手册的内容将做不定期的更新,恕不另行通知。
装箱清单名称数量高清网络摄像机主机1台12V电源1套《高清网络摄像机用户使用说明书》1本配套光盘1张合格证以及保修卡各1张使用注意事项1、安装环境✋远离高温的热源和环境;避免阳光直接照射;✋为确保摄像机的正常散热,应避开通风不良的场所,注意防水,防潮,防雷。
如需安装到户外,则需要安置防水箱,将摄像机固定其中;✋本机应水平安装或壁挂安装,避免安装在会剧烈震动的场所,勿将其它设备放于本机上。
2、避免电击和失火✋切记勿用湿手触摸电源和摄像机;✋勿将液体溅落在摄像机上,以免造成机器内部短路或失火;✋勿将其它设备直接放置于本摄像机上部;✋非专业人员请勿自行拆开机壳,避免损坏和电击;3、运输与搬运✋本机的包装经过抗震设计和实验,确保在运输过程中摄像机不会受到意外损坏,所以在搬运本机时,最好使用原来的包装材料和纸箱;✋避免在过冷、过热的场所间相互搬动摄像机,以免机器内部产生结露,影响机器的使用寿命;✋严禁带电搬动本机,否则会损坏主板;目录1 产品简介 (4)1.1产品简介 (4)1.2功能简介 (4)1.3技术规格 (4)2 外观与说明 (5)3 设备与安装 (6)3.1 运行环境 (7)3.2 设备安装 (7)4 IE 版客户端 (7)4.1 准备工作 (7)4.2 开始登陆 (7)4.3 功能简介 (8)4.3.1实时监视 (8)4.3.2录像回放 (10)4.3.3 参数设置 (11)4.3.3.1基本信息设置 (12)4.3.3.2网络参数设置 (15)4.3.3.3通道参数设置 (20)4.3.3.4报警参数设置 (24)4.3.3.5前端存储设置 (26)5.常见问题解答 (29)5.1无法通过浏览器访问网络摄像机 (29)5.2云台或球型摄像机不能控制 (30)5.3程序升级以后,无法正常播放视频 (30)5.4如何使网络摄像机在公网(Internet)上进行视频传输服务 (30)5.5为何正常数据不能通过交换机 (31)5.6为何升级后通过浏览器访问网络摄像机会出错 (31)6.附录 (32)附录A关于网络摄像机端口占用(映射)的问题说明 (32)附录B 出厂默认参数 (33)7.术语解释 (34)1产品简介1.1产品简介感谢您使用本公司产品,我们将向您提供最好的服务。
(转)RGB、YUY2、YUYV、YVYU、UYVY、AYUV格式详解

(转)RGB、YUY2、YUYV、YVYU、UYVY、AYUV格式详解YUY2经常⽤于电视制式以及许多摄像头的输出格式.⽽我们在处理时经常需要将其转化为RGB进⾏处理,这⾥简单介绍下YUY2(YUV)与RGB 之间相互转化的关系:YUY2(YUV) To RGB:C = Y - 16D = U - 128E = V - 128R = clip(( 298 * C + 409 * E + 128) >> 8) G = clip(( 298 * C - 100 * D - 208 * E + 128) >> 8) B = clip(( 298 * C + 516 * D + 128) >> 8)其中 clip()为限制函数,将其取值限制在0-255之间.RGB To YUY2(YUV):Y = ( ( 66 * R + 129 * G + 25 * B + 128) >> 8) + 16U = ( ( -38 * R - 74 * G + 112 * B + 128) >> 8) + 128V = ( ( 112 * R - 94 * G - 18 * B + 128) >> 8) + 128上述两个公式在代码中的int YUV2RGB(void* pYUV, void* pRGB, int width, int height, bool alphaYUV, bool alphaRGB);int RGB2YUV(void* pRGB, void* pYUVX, int width, int height, bool alphaYUV, bool alphaRGB);函数中转换。
在诸如摄像头的数据获取中,我们往往需要直接在YUY2(YUV)空间上进⾏⼀些图象处理,我们希望能够在YUY2 (YUV)进⾏⼀些RGB上可以做到的处理。
这⾥已blending为例,将两张带有透明度的YUY2(YUV)图⽚进⾏叠加,以达到在RGB空间进⾏图像合成的效果。
OV6620 OV7620图像采集_SCCB 寄存器
岱默科技 用心服务
岱默科技
图 3 主向从―写‖数据
图 4 主向从―读‖数据
【说明】 : 确认, 即 DATASHEET 里的 ACK, 是指检测到数据发送端置低信号, 即确认的信号必须是 0。不确认即为 1。
图 1 IIC 总线位传输
图 2 IIC 总线数据传输
4.2 OV6620/OV7620 的 SCCB 实现
OV6620/7620 支持单个从设备.,当只有唯一个从设备时, 6620 ID 须置为 0XC0 (写)和 0XC1 (读)。7620 ID 是 0X42(写)和 0X43(读) 。 在写周期中,IIC 总线上的第一个字节是选择单个片内寄存器的子地址,第 三个字节是读写该寄存器的数据。写一个未定义的子地址将被忽略。 在读周期中,IIC 总线上的第一个字节是读写该寄存器的数据,子地址用前 面的。读一个未定义的子地址,返回数据不定。
17 18 19 1A 1B 1C 1D 20
HREFST HREFEND VSTRT VEND PSHFT MIDH MIDL COME
38 EA 03 92 00 7F A2 00
RW RW RW RW RW R R RW
21 22 23 24 25
YOFF UOFF REFC AEW AEB
80 80 04 33 97
岱默科技 用心服务
岱默科技
在写周期里,OV6620/7620 返回确认位,在读周期里,主设备返回确认位, 除非读的数据是最后一个字节。 如果读的数据是最后一个字节,主设备并不返回 确认位,通知从设备读周期可以终止。 每一字节内, 最高位总是先传输。 读/写控制位是第一字节的最低位。 标准 IIC 通信仅需两个管脚:SCL 和 SDA。 SDA 设置成开漏双向端口。 SCL 为高时,SDA 上从高到低的转换表示开始。SCL 为高时,SDA 上从 低到高的转换表示结束。只有主设备可以产生开始/结束信号。 除了以上两种情况外, 协议要求 SDA 在时钟 SCL 位高电平器件保持稳定。 只有当 SCL 为低时每一位才允许改变状态(参见下面图 1 的 IIC 总线位传输 和图 2 的 IIC 总线数据传输)。
常用图像像素格式NV12、NV2、I420、YV12、YUYV
常用图像像素格式NV12、NV2、I420、YV12、YUYV2021-03-11 235 1欢迎加入官方QQ群:952873936或联系站长进行技术交流。
常用图像像素格式RGB 和YUV,像素格式描述了像素数据存储所用的格式,定义了像素在内存中的编码方式。
RGB 和 YUV 为两种经常使用的像素格式。
1.RGB 格式一般较为熟悉,RGB图像具有三个通道R、G、B,分别对应红、绿、蓝三个分量,由三个分量的值决定颜色;这三种颜色称为三原色,将它们以不同的比例相加,可以产生多种多样的颜色。
通常,会给RGB图像加一个通道alpha,即透明度,于是共有四个分量共同控制颜色(RGBA)在图像显示中,一张1280 * 720 大小的图片,就代表着它有1280 * 720 个像素点。
其中每一个像素点的颜色显示都采用RGB 编码方法,将 RGB 分别取不同的值,就会展示不同的颜色。
RGB 图像中,每个像素点都有红、绿、蓝三个原色,其中每种原色都占用 8 bit,也就是一个字节,那么一个像素点也就占用 24 bit,也就是三个字节。
一张 1280 * 720 大小的图片,就占用 1280 * 720 * 3 / 1024 / 1024 = 2.63 MB 存储空间。
2.YUV 格式(YCrCb)是指将亮度参量Y和色度参量U/V分开表示的像素格式,主要用于优化彩色视频信号的传输。
•Y 表示明亮度(Luminance,Luma或brightness),也就是灰阶值•U 和 V 表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。
•YUV像素格式来源于RGB像素格式,通过公式运算,YUV 三分量可以还原出 RGB,YUV 转 RGB 的公式如下:1.R = Y + 1.403V2.G = Y - 0.344U - 0.714V3.B = Y + 1.770U一般,将 RGB 和 YUV 的范围均限制在 [0, 255] 间,则有如下转换公式:1.R = Y + 1.403(V - 128)2.G = Y - 0.344(U - 128) - 0.714(V - 128)3.B = Y + 1.770(U - 128)鉴于RGB 格式已经见得见多,本文主要总结YUV 常见的几种像素格式。
飞思卡尔智能车OV6620数字摄像头详解2
飞思卡尔智能车OV6620数字摄像头详解已有 705 次阅读2009-12-14 13:22原文地址:/flyreally/blog/item/3dceca17cf551e00c93d6dd9.html与普通模拟摄像头需要9~12V供电不同,OV6620仅需5V供电,因飞思卡尔智能车比赛提供的电池电压是7.2~8.2V,所以用OV6620省去了做升压电路这一环节,仅仅需要做一个5V供电就可以,可以采用7805芯片或2940芯片,电路简单。
OV6620采用PAL制式(国内的普通电视机制式),每秒25帧,分辨率为356*292,内部集成了AD转换模块和视频分离模块,省去了1881视频分离芯片。
当然,也可以当模拟摄像头来使用,比如调焦时,这时可以将视频信号端接至OV6620的VTO端即可。
OV6620的优点:供电电压低,简化电路;内部集成AD和视频分离模块,简化电路,并且使得采集程序简单,采集质量高;视频信号转换在内部进行,减轻单片机负担。
OV6620共有32个引脚,但我们真正能用到的不多。
我在做智能车时仅仅用到13个引脚,其他引脚并未使用,但是其他学校也有使用其他引脚的。
现在把常用的引脚列出来:Y0~Y7(数据输出端,接单片机IO口)、VSYNC(场中断信号端)、HREF(行中断信号端)、VCC(接5V)、GND(接地)、VTO(接视频采集卡调焦),其他可能会使用到的引脚:PCLK(像素同步信号端)、FODD(奇偶场信号端)。
摄像头的工作原理在这里不在进行说明,但需要说明的是:因为OV6620场中断上升沿时间很短,单片机可能捕捉不到上升沿中断,所以判断OV6620一场是否开始选择使用下降沿判断;行中断使用上升沿判断,而且采集的有效点都是在上升沿范围内,下降沿则表示已经进入行消隐区,此时采集的都是废数据(在使用OV6620采集时都为0X10)。
利用这个可以通过测试判断一行所能采集到的有效点个数。
关于中断触发,行中断(HREF)接单片机的T0口,场中断(VSYNC)接单片机的T1口,保证图像采集不会被打断。
OV6620+FIFO摄像头模组使用详解
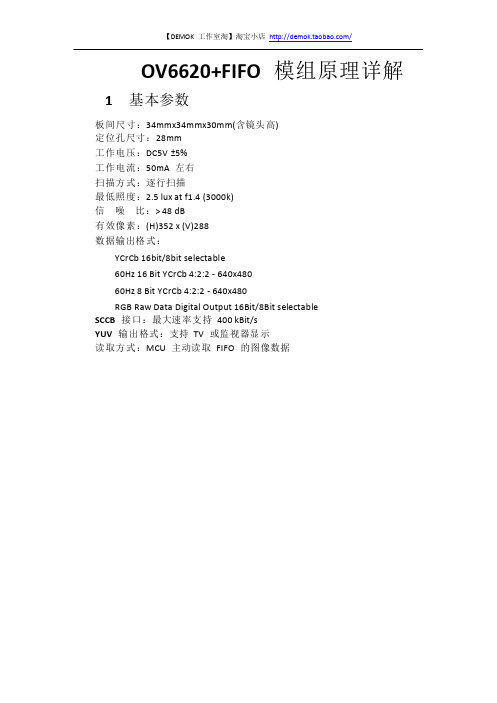
OV6620+FIFO模组原理详解1 基本参数板间尺寸:34mmx34mmx30mm(含镜头高)定位孔尺寸:28mm工作电压:DC5V ±5%工作电流:50mA 左右扫描方式:逐行扫描最低照度:2.5 lux at f1.4 (3000k)信噪比:> 48 dB有效像素:(H)352 x (V)288数据输出格式:YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectableSCCB 接口:最大速率支持400 kBit/sYUV 输出格式:支持TV 或监视器显示读取方式:MCU 主动读取FIFO 的图像数据2 系统实现方法说明2.1 系统硬件连接图2.2 OV6620 时序分析垂直同步信号VSYN 为两个正脉冲之间扫描一帧的定时,即完整的一帧图像在两个正脉冲之间;水平同步信号HREF 扫描该帧图像中各行像素的定时,即高电平时为扫描一行像素的有效时间;像素同步信号PCLK 为读取有效像素值提供同步信号,高电平时输出有效图像数据,若当前图像窗口大小为352×288,则在VSYNC 两个正脉冲之间有288 个HREF 的正脉冲,即288行;在每个HREF 正脉冲期间有352 个PCLK 正脉冲,即每行352 个像素。
这就是VSYNC、HREF、PCLK 三个同步信号之间的关系。
2.3 图像数据自动存储为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过逻辑门就能产生符合FIFO 要求的写时序,如图所示。
为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过一个“与非门”就能产生符合FIFO 要求的写时序,如图所示。
将帧同步信号VSYN 引入MCU 中断输入口,复位后WE 置0,“与非门”关闭,输出1。
OV6620 OV720摄像头YUV RGB格式说明

1视觉颜色的表示方法(RGB YUV HSI YIQ YcbCr YD6Dr CMY CMYK…)在解释OV摄像头的几种格式之前,有必要简单地介绍一下视频或图像的颜色表示方法。
如果要通过上位机图像采集显示图片,必需熟悉图片的数据储存格式。
如BMP格式是由文件头,信息头,调色板,位图数据构成,因此,如果是在VC 环境下采集图像,必须把数据转化为BMP格式进行内存分配和存储。
TIF,JPG 也是一样的。
值得一提的是VB 和MA TLAB在图像显示方面比VC有很大有优势。
如果不用图像的形式显示储存,在VC里利用CDC在GetClientRect的区域上描点显示也不失一种上位面设计方案;在VB里也可以利用lable控件数组用不同的颜色排列组成可视的图片。
1.1RGB格式RGB 在计算机领域有着举足轻重的地位, 由于色彩显示器使用红、绿、蓝3 色来产生需要的颜色, 所以被广泛用于计算机图形和成像之中。
然而, 在处理现实世界的图像时,RGB 并非很有效, 因为它对所有色彩都用等长像素点的R、G、B 3 色加以合成。
这就使得每个像素在R、G、B 3 个成分上拥有相同的像素深度和显示分辨率。
而且, 处理RGB 色彩空间的图像也不是最有效的。
RGB有一个问题是数据量太大,采集里如果每一个相素都是3个BYTE的数据(R G B),是很没有必要的,于是有人就想去了两个相素点共用一种颜色的算法。
这个算法就是著名的bayer算法的初始。
R感应红光,G感应绿光,B感应蓝光。
在Bayer格式的图像中,图像一半的像素分配给G分量,而R和B分量则占图像的另一半像素。
因为G分量是R、B分量的两倍,所以如果G分量采用好的插值方法,不仅可以提高G 分量的质量,还可以提高R和B分量的质量。
Bayer格式示意图:1.2YUV格式人类的眼睛对低频信号比对高频信号具有更高的敏感度。
事实上,人类的眼睛对明视度的改变也比对色彩的改变要敏感的多。
YUV彩色电视信号传输时,将R、G、B改组成亮度信号和色度信号。
ov6620 ov7670 ov7620 各自优点
ov6620与普通模拟摄像头需要9~12V供电不同,OV6620仅需5V供电,因飞思卡尔智能车比赛提供的电池电压是7.2~8.2V,所以用OV6620省去了做升压电路这一环节,仅仅需要做一个5V 供电就可以,可以采用7805芯片或2940芯片,电路简单。
OV6620采用PAL制式(国内的普通电视机制式),每秒25帧,分辨率为356*292,内部集成了AD转换模块和视频分离模块,省去了1881视频分离芯片。
当然,也可以当模拟摄像头来使用,比如调焦时,这时可以将视频信号端接至OV6620的VTO端即可。
OV6620的优点:供电电压低,简化电路;内部集成AD和视频分离模块,简化电路,并且使得采集程序简单,采集质量高;视频信号转换在内部进行,减轻单片机负担。
OV6620共有32个引脚,但我们真正能用到的不多。
我在做智能车时仅仅用到13个引脚,其他引脚并未使用,但是其他学校也有使用其他引脚的。
现在把常用的引脚列出来:Y0~Y7(数据输出端,接单片机IO口)、VSYNC(场中断信号端)、HREF(行中断信号端)、VCC(接5V)、GND(接地)、VTO(接视频采集卡调焦),其他可能会使用到的引脚:PCLK (像素同步信号端)、FODD(奇偶场信号端)。
摄像头的工作原理在这里不在进行说明,但需要说明的是:因为OV6620场中断上升沿时间很短,单片机可能捕捉不到上升沿中断,所以判断OV6620一场是否开始选择使用下降沿判断;行中断使用上升沿判断,而且采集的有效点都是在上升沿范围内,下降沿则表示已经进入行消隐区,此时采集的都是废数据(在使用OV6620采集时都为0X10)。
利用这个可以通过测试判断一行所能采集到的有效点个数。
关于中断触发,行中断(HREF)接单片机的T0口,场中断(VSYNC)接单片机的T1口,保证图像采集不会被打断。
市场上提到可以应用在智能车上的摄像头,多如牛毛。
到底那一款最适合用在智能车上呢,这里DEMOK选取了2款典型的摄像头OV7670与OV7620,从其特性和性能等角度,剖析摄像头的特点,为大家揭开迷雾。
ov6620摄像头使用说明
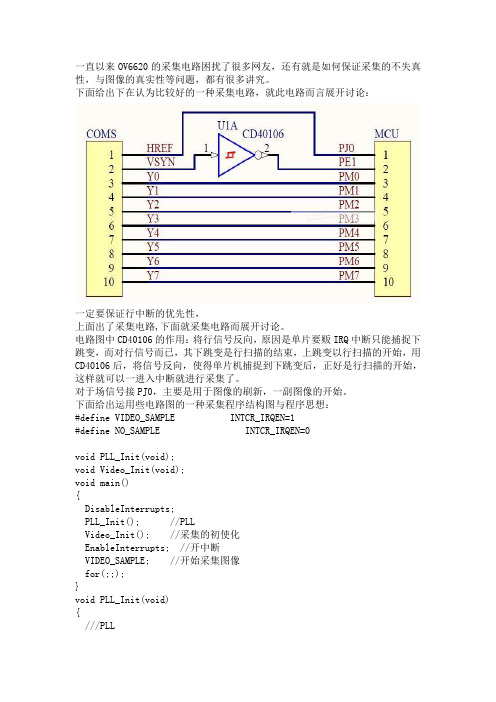
一直以来OV6620的采集电路困扰了很多网友,还有就是如何保证采集的不失真性,与图像的真实性等问题,都有很多讲究。
下面给出下在认为比较好的一种采集电路,就此电路而言展开讨论:一定要保证行中断的优先性,上面出了采集电路,下面就采集电路而展开讨论。
电路图中CD40106的作用:将行信号反向,原因是单片要贩IRQ中断只能捕捉下跳变,而对行信号而已,其下跳变是行扫描的结束,上跳变以行扫描的开始,用CD40106后,将信号反向,使得单片机捕捉到下跳变后,正好是行扫描的开始,这样就可以一进入中断就进行采集了。
对于场信号接PJ0,主要是用于图像的刷新,一副图像的开始。
下面给出运用些电路图的一种采集程序结构图与程序思想:#define VIDEO_SAMPLE INTCR_IRQEN=1#define NO_SAMPLE INTCR_IRQEN=0void PLL_Init(void);void Video_Init(void);void main(){DisableInterrupts;PLL_Init(); //PLLVideo_Init(); //采集的初使化EnableInterrupts; //开中断VIDEO_SAMPLE; //开始采集图像for(;;);}void PLL_Init(void){///PLL}void Video_Init(void){//开行中断,开场中断}#pragma CODE_SEG NON_BANKEDvoid interrupt 6 IRQ_ISR(){//判断是否是采集的行,不是就跳出,//采集}#pragma CODE_SEG DEFAULT_ROM#pragma CODE_SEG NON_BANKEDvoid interrupt x PORTJ_ISR(){//一融图像采集完//图像矩阵清零}#pragma CODE_SEG DEFAULT_ROM当然上述只是很多种采集程序中的一种架构,但是万变不离其中,其目的是一样的,就是图像采集。
YUV格式介绍

YUV格式介绍最近在做视频采集⽅⾯的程序,使⽤vlc对采集到的视频进⾏播放,但是视频的颜⾊格式貌似有问题导致⽆法播放,以下为VLC WIKI关于YUV格式的翻译,YUV是视频应⽤中使⽤的⼀类像素格式。
YUV实际上是所有“YUV”像素格式共有的颜⾊空间的名称。
与RGB格式(红 - 绿 - 蓝)相对应,YUV颜⾊⽤⼀个称为Y(相当于灰度)的“亮度”分量和两个“⾊度”分量表⽰,分别称为U(蓝⾊投影)和V(红⾊投影), YUV由此得名。
YUV也可以称为YCbCr,虽然这些术语的含义略有不同,但它们往往会混着并互换使⽤。
本⽂介绍了VLC媒体播放器环境中最有⽤的YUV像素格式。
除⾮另有说明,否则每个成员的⽤⼀个⼋位字节(8位)存储。
平⾯格式平⾯(或有时“三平⾯”)格式对3种颜⾊分量中的每⼀种使⽤单独的矩阵。
换句话说,存在⼀个亮度像素值表和⽤于⾊度分量的两个单独的表。
这在像素的存储器中的分离表⽰对于视频编码更⽅便。
⼀、平⾯格式平⾯(或有时称“三平⾯”)格式对3种颜⾊分量中的每⼀种使⽤单独的矩阵。
换句话说,存在⼀个亮度像素值表和⽤于⾊度分量的两个单独的表。
在存储器中将像素分离表⽰,这对于视频编码更⽅便。
1. YUV 4:2:0 (I420/J420/YV12)(1). I420⾸先它有⼀个“亮度”平⾯Y,然后是U⾊度平⾯,最后是V⾊度平⾯。
两个⾊度平⾯(蓝⾊和红⾊投影)在⽔平和垂直维度以2为倍数进⾏下采样。
也就是说,对于2x2像素块,有4个Y样本,⽽只有1个U样本和1 V样本。
对于4个像素,此格式需要4 * 8 + 8 + 8 = 48位,因此其位深度是12。
⽬前,I420是VLC中最常见的格式。
⼤多数视频解码器也以I420格式输出原始图像。
以下符号说明:每个字母(Y/U/V)代表⼀位。
对于⼀个 I420 像素存储的位格式: YYYYYYYY UU VV对于50个像素的 I420 帧: YYYYYYYY*50 UU*50 VV*50 (or Y*8*50 U*2*50 V*2*50 for short)对于n个像素的 I420 帧: Y*8*n U*2*n V*2*n(2). J420J420可以说和I420完全相同,但具有全范围(“数字”,0-255)亮度(Y)分量⽽不是有限范围(“模拟”,16-240)。
摄像头YUV2格式详解

摄像头YUV2格式详解
摄像头YUV2格式详解
YUY2格式,即4个字节来表⽰两个像素点的YUV信息,排列为Y1U1Y2V2,对于像素点1为(Y1,U1,V1),像素点2为(Y2,U1,V1)。
即两个像素点共⽰U、V信息。
亮度信号Y和两个⽰差信号R-Y(即U)、B-Y(即V),最后发送端将亮度和⽰差三个信号分别进⽰编码,⽰同⽰信道发送出去。
这种⽰彩的表⽰⽰法就是所谓的YUV⽰彩空间表⽰。
采⽰YUV⽰彩空间的重要性是它的亮度信号Y和⽰度信号U、V是分离的。
如果只有Y信号分量⽰没有U、V分量,那么这样表⽰的图像就是⽰⽰灰度图像。
彩⽰电视采⽰YUV空间正是为了⽰亮度信号Y 解决彩⽰电视机与⽰⽰电视机的兼容问题,使⽰⽰电视机也能接收彩⽰电视信号。
由于本⽰针对摄像头采集所得的数据进⽰处理,因此数据为YUY2格式,即4个字节来表⽰两个像素点的YUV信息,排列为Y1 U1 Y2 V2,对于像素点1为(Y1, U1, V1),像素点2为(Y2, U1, V1)。
即两个像素点共⽰U、V信息。
同理,pData[0]是第⽰个像素亮度,pData[1]是两个像素共⽰的U,pData[2]是第⽰个像素亮度,pData[3]是两个像素共⽰的V,依次类推。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1视觉颜色的表示方法(RGB YUV HSI YIQ YcbCr YD6Dr CMY CMYK…)在解释OV摄像头的几种格式之前,有必要简单地介绍一下视频或图像的颜色表示方法。
如果要通过上位机图像采集显示图片,必需熟悉图片的数据储存格式。
如BMP格式是由文件头,信息头,调色板,位图数据构成,因此,如果是在VC 环境下采集图像,必须把数据转化为BMP格式进行内存分配和存储。
TIF,JPG 也是一样的。
值得一提的是VB 和MA TLAB在图像显示方面比VC有很大有优势。
如果不用图像的形式显示储存,在VC里利用CDC在GetClientRect的区域上描点显示也不失一种上位面设计方案;在VB里也可以利用lable控件数组用不同的颜色排列组成可视的图片。
1.1RGB格式RGB 在计算机领域有着举足轻重的地位, 由于色彩显示器使用红、绿、蓝3 色来产生需要的颜色, 所以被广泛用于计算机图形和成像之中。
然而, 在处理现实世界的图像时,RGB 并非很有效, 因为它对所有色彩都用等长像素点的R、G、B 3 色加以合成。
这就使得每个像素在R、G、B 3 个成分上拥有相同的像素深度和显示分辨率。
而且, 处理RGB 色彩空间的图像也不是最有效的。
RGB有一个问题是数据量太大,采集里如果每一个相素都是3个BYTE的数据(R G B),是很没有必要的,于是有人就想去了两个相素点共用一种颜色的算法。
这个算法就是著名的bayer算法的初始。
R感应红光,G感应绿光,B感应蓝光。
在Bayer格式的图像中,图像一半的像素分配给G分量,而R和B分量则占图像的另一半像素。
因为G分量是R、B分量的两倍,所以如果G分量采用好的插值方法,不仅可以提高G 分量的质量,还可以提高R和B分量的质量。
Bayer格式示意图:1.2YUV格式人类的眼睛对低频信号比对高频信号具有更高的敏感度。
事实上,人类的眼睛对明视度的改变也比对色彩的改变要敏感的多。
YUV彩色电视信号传输时,将R、G、B改组成亮度信号和色度信号。
PAL制式将R、G、B三色信号改组成Y、U、V信号,其中Y信号表示亮度,U、V信号是色差信号。
对人类而言, Y分量比U分量重要,根据人眼的这一特征,在不使用任何复杂算法的前提下,可以适当地抛弃U和V分量以达到压缩的目的,这就是部分取样。
部分取样的常见方式有YUV444 (无压缩)、YUV422 ( 3313 %压缩)、YUV411 ( 5010 %压缩)、YUV420 (5010%压缩)等,其中的数字表明了Y,U , V 3个分量的取样比例,即各分量水平取样因子与垂直取样因子乘积的比例。
以N ×N 大小的方阵为例,假设:对Y取N ×N个数据单元,即水平取样因子Hy = N ;垂直取样因子Vy = N.对U和V均取M1 ×M2个数据单元(0≤M1 ,M2≤N) ,即:水平取样因子Hu = M1 ,Hv = M1 ;垂直取样因子Vu = M2 , Vv = M2 .则Y、U、V取样比为( N ×N)∶( M1 ×M2 )∶(M1 ×M2 )。
若取N = 2 , M1 = 2 , M2 = 2 ,这就是YUV444的一种取样方式,没有压缩;若取N = 2 , M1 = 2 , M2 = 1 ,这就是YUV422的一种取样方式,压缩比3313 %;若取N = 2 , M1 = 1 , M2 = 1 ,这就是YUV411的一种取样方式,压缩比5010 %;若取N = 2 , M1 = 1 , M2 = 1 ,这就是YUV420的一种取样方式,压缩比5010 %。
注意, 4∶2∶0并非是色差信号采样为0 ,而是和4∶1∶1相比,在水平方向上提高1倍色差采样频率,在垂直方向上以CrPCb间隔的方式减小一半色差采样。
1.3HSI格式HSI模型中,H表示色调(Hue),S表示饱和度(Saturation),I表示亮度(Intensity,对应成像亮度和图像灰度)。
这个模型的建立基于两个重要的事实:①I分量与图像的彩色信息无关;②和S分量与人感受颜色的方式是紧密相联的。
这些特点使得HSI模型非常适合借助人的视觉系统来感知彩色特性的图像处理算法。
上图的色相环描述了色相和饱和度两个参数。
色相由角度表示,它反映了该彩色最接近什么样的光谱波长。
一般假定0°表示的颜色为红色,120°的为绿色,240°的为蓝色。
0°到240°的色相覆盖了所有可见光谱的彩色,在240°到300°之间为人眼可见的非光谱色(紫色)。
饱和度是指一个颜色的鲜明程度,饱和度越高,颜色越深,如深红,深绿。
饱和度参数是色环的原点(圆心)到彩色点的半径的长度。
由色相环可以看出,环的边界上纯的或饱和的颜色,其饱和度值为1。
在中心是中性(灰色)阴影,饱和度为0。
亮度是指光波作用于感受器所发生的效应,其大小由物体反射系数来决定,反射系数越大,物体的亮度愈大,反之愈小。
HSI模型的三个属性定义了一个三维柱形空间,如上图,柱形彩色空间所示。
灰度阴影沿着轴线从底部的黑变到顶部的白,具有最高亮度。
最大饱和度的颜色位于圆柱上顶面的圆周上。
1.4YcbCr格式YCbCr则是在世界数字组织视频标准研制过程中作为ITU - R BT1601建议的一部分,其实是YUV经过缩放和偏移的翻版。
其中Y与YUV中的Y含义一致, Cb , Cr同样都指色彩,只是在表示方法上不同而已。
在YUV家族中, YCbCr 是在计算机系统中应用最多的成员,其应用领域很广泛,JPEG、MPEG均采用此格式。
一般人们所讲的YUV大多是指YCbCr。
YCbCr有许多取样格式,如4∶4∶4 , 4∶2∶2 , 4∶1∶1和4∶2∶0。
意义和YUV一样。
1.5YD6Dr格式YD6Dr被用作SECAM复合色彩系统视频的标准。
同样Y指颜色的透明度即灰度,而Db、Dr表示颜色信息。
因为它主要用于模拟信号,在表示方法上与YUV稍有不同,所以自成一家。
1.6CMY格式CMY (Cyan、Magenta、Yellow)色彩空间也是一种常用的表示颜色的方式。
计算机屏幕的显示通常用RGB色彩空间。
它是通过颜色的相加来产生其他颜色,这种方法通常称为加色合成法(Addit2ive Color Synthesis)。
而在印刷工业上则通常用CMY色彩系统(一般所称的四色印刷CMYK则是再加上黑色) ,它是通过颜色相减来产生其他颜色的,所以我们称这种方式为减色合成。
CMYK模式的原色为青色(Cyan)、品红色(Magenta)、黄色(Yellow)和黑色(Black)。
在处理图像时,一般不用CMYK模式,主要是因为这种模式的文件大,占用的磁盘空间和内存大。
这种模式一般在印刷时使用。
1.7YIQ格式YIQ色彩空间是从YUV色彩空间衍生出来的,被北美电视系统所采用,被NTSC选作为符合色彩视频标准。
Y也是指颜色的透明度,即灰度。
而I代表In2Phase (同相) , Q代表Quadrature (积分) ,它们表示了一种传输色彩信息的调制方法,实际上也指色调,只是与YUV略有不同。
2OV6620/OV7620的格式详述2.1U V RGB 8bit 16bit中的8bit 16bit是何意?我们不防看一下DS上如何描述的:对于RGB的16bit/8bit:The OV6620/OV6120 image sensor can also be programmed to provide video output in RGBRaw Data 16-bit/8-bit/4-bit format. The output sequence is matched tothe OV6620 Color FilterPattern (See Section Figure 4.)Pixel Data Bus (RGB Output), below):– Y channel output sequence is G R G R– UV channel output sequence is B G B GFor 8-bit RGB Raw Data video output appears on the Ychannel (with an output sequence of BG R G) and theUV channel is disabled.对于YUV的16bit/8bit:the UV channel output format for 16-bit configurations becomes:– V U V U...etc.and for 8-bit configurations becomes:– V Y U Y ...etc.无论是RGB还是YUV格式,无论是8BIT还是16BIT,摄像头的数据输出都用了压缩算法,在RGB时,用了BAYER表示,在YUV格式时,用了4:2:2的压缩。
8bit模式时,TCLK比16bit时要快1倍,为什么呢?8bit模式下:UV管脚被禁用了,输出为三态。
只有Y管脚输出数字信号。
16bit 模式下,Y和UV管脚都有输出。
在8bit模式下,要输出16bit的数据,即通过Y 管脚把UV管脚的数据也一起输出来。
那么当然输出的速度要快一倍了。
2.2RGB格式下Y管脚和UV管脚的信号解析它们的信号输出如何解析呢?下面以RGB模式下的16BIT和8BIT输出作分析。
我们不防先看一下6620输出的图像原始矩阵(即bayer矩阵)。
一定要建立这个观念:在RGB模式下,6620输出的不是图像,是一个BAYER矩阵,必须通过算法把BAYER还原成图像。
无论是8BIT还是16BIT,输入的数字必须填满下面的的BAYER矩阵。
现在的问题是,如何把Y 和UV(8bit模式下没有)的输出数字填入下面的矩阵就是信号输出的解析内容。
上面的是典型的bayer矩阵,通过双线性差值法可以找到292*356个点的R G B各自的相素值大小。
为什么可以这样呢?因为相邻的两个点的RGB相差不会太远,可以差值法近似用旁边的相素点的RGB值表示该点的RGB值(具体算法思路可看《Bayer转化RGB格式》)。
如何把Y和UV的输入数字填入BAYER表中呢?还是分两种情况,16bit情况和8bit情况:(1)16bit情况:-1st HREF Y channel output unstable data UV output B11 G12 B13 G14 ....-2nd HREF Y channel output G21 R22UV output B11 G12 B13 G14 ...G23 R24 ...-3rd HREF Y channel output G21 R22 G23UV output B31 G32 B33 G34 ....R24 ...,-4th HREF Y channel output G41 R42 G43UV output B31 G32 B33 G34 ....R44 ...从数据解析图来看,的确,U和V的数量只有Y的一半。