ADAS研发与测试的模拟仿真技术 - 吉林大学
adas模型实验报告

adas模型实验报告ADAS模型实验报告摘要:本实验旨在使用ADAS模型对交通场景中的车辆进行智能驾驶决策。
通过对实验数据的收集和分析,我们评估了ADAS模型在不同交通场景下的性能,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
引言:随着自动驾驶技术的不断发展,ADAS(Advanced Driver Assistance Systems)模型已经成为智能驾驶系统的核心组成部分。
该模型通过对车辆周围环境的感知和分析,实现了对驾驶决策的智能化处理,从而提高了驾驶安全性和效率。
实验方法:本实验使用了一辆配备了ADAS模型的自动驾驶汽车,并在不同的交通场景下进行了测试。
我们收集了车辆感知和行为数据,并对其进行了分析。
通过对比实验数据和模型预测结果,我们评估了ADAS模型在不同交通场景下的性能表现。
实验结果:实验结果显示,ADAS模型在城市道路、高速公路和复杂交叉路口等不同交通场景下都表现出了良好的性能。
模型能够准确地感知周围车辆和行人,并做出相应的驾驶决策。
此外,我们还对模型进行了一些改进和优化,进一步提高了其性能。
讨论:通过本实验,我们发现ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力。
然而,该模型在复杂交通场景下仍然存在一些挑战,需要进一步的改进和优化。
未来,我们将继续深入研究ADAS模型,并探索其在自动驾驶技术中的更广泛应用。
结论:本实验对ADAS模型在交通场景中的性能进行了评估,并对其进行了改进和优化。
实验结果表明,ADAS模型在提高交通安全性和驾驶效率方面具有显著的潜力,为智能驾驶技术的发展提供了有力的支持。
我们相信,通过不断地研究和创新,ADAS模型将在未来的智能驾驶系统中发挥越来越重要的作用。
adas仿真测试流程

adas仿真测试流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!ADAS仿真测试流程。
1. 测试计划制定。
明确测试目标、范围、方法论和评估标准,编制具体的测试计划。
ADAS系统开放道路测试方法研究

ADAS系统开放道路测试方法研究摘要:高级驾驶辅助驾驶系统(ADAS)在汽车上的应用越来越广泛。
为解ADAS系统开放道路测试评价方法的难题,本文介绍了ADAS系统开放道路测试的评价方法。
本文研究的测试方法主要对被测系统进行功能逻辑覆盖测试,验证其在各种真实交通环境下的适应性和鲁棒性。
以实际项目为例,详细阐述测试方案设计、制定测试规范、试验路线制定、试验数据分析、测试报告出具等测试项目各阶段的实施方法。
通过实践证明,按本测试方法测试人员可完成测试方案、测试实施、数据处理等工作,发现被测系统功能、逻辑、性能等方面的缺陷与不足,定位并还原问题场景,给出合理化的改进意见,进而不断优化和升级ADAS系统。
企业可建立完备的ADAS实车开放道路测试流程和测试规范。
关键词:智能网联汽车;开放道路测试;试验技术Research on open road Test method of ADAS SystemChen Shanbiao,Gao Fei,Pan Jiadi(Dongfeng Liuzhou Automobile Co., LTD,Liuzhou 545005 )Absract:Advanced driver assistance driving system (ADAS) is more and more widely used in automobile.In order to solve the problem of ADAS open road test evaluation method, this paper introduces the evaluation method of ADAS open road test.The test method studied inthis paper mainly tests the functional logic coverage of the tested system to verify its adaptability and robustness in various realtraffic environments.Taking the actual project as an example, the implementation methods of each stage of the test project, such as test scheme design, test specification formulation, test route formulation, test data analysis and test report issuance, are described indetail.It has been proved through practice that according to this testmethod, testers can complete the test scheme, test implementation, data processing and other work, find the defects and deficiencies in the function, logic, performance and other aspects of the tested system, locate and restore the problem scenes, give reasonable suggestions for improvement, and then continuously optimize and upgrade the ADAS system.Enterprises can establish a complete ADAS open road test process and test specifications.Key Words:Intelligent connected vehicle; Open road test; Test technology前言智能网联汽车ADAS系统开放道路测试开放道路测试主要是模拟用户实际使用的工况,对ADAS系统进行测试,包含不同的天气类型、光照条件、交通繁忙度、交通类型、路面情况、路侧目标、车辆类型、路况类型等九大测试要素。
ADAS实验平台硬件在环仿真
10.16638/ki.1671-7988.2019.09.012ADAS实验平台硬件在环仿真*许广吉,石晶(辽宁工业大学汽车与交通工程学院,辽宁锦州121000)摘要:高级辅助驾驶(Advanced Driver Assistant System,ADAS)可以在很大程度上降低交通事故,减少人员伤亡和不必要的经济损失。
因此,各个汽车厂以及高校对ADAS进行研发。
文章进行ADAS实验台进行搭建,并且能过实现MA TLAB/Simulink、NI-Veristand和CarSim软件的联合仿真。
关键词:ADAS实验平台;仿真中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)09-42-02ADAS experimental platform hardware in the loop simulation*Xu Guangji, Shi Jing(College of Automobile and Transportation Engineering, Liaoning University of Technology, Liaoning Jinzhou 121000 )Abstract: Advanced Driver Assistant System (ADAS) can greatly reduce traffic accidents, casualties and unnecessary economic losses. Therefore, each automobile factory as well as the university carries on the research and development to the ADAS. In this paper, the ADAS experimental platform was built and the joint simulation of MA TLAB/Simulink, ni-veristand and CarSim software was realized.Keywords: ADAS experimental platform; The simulationCLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)09-42-02前言高级驾驶辅助系统(Advanced Driver Assistant System,ADAS),是基于安装在汽车上的各种传感器,在汽车行驶的过程中收集车内外的数据、辨识静态和动态物体,进行运算和分析并将相关信息反馈给驾驶者或进行相关的辅助决策,从而提高汽车行驶的安全性[1]。
汽车车身与模具虚拟设计仿真技术
汽车车身与模具虚拟设计仿真技术
胡平
【期刊名称】《《CAD/CAM与制造业信息化》》
【年(卷),期】2004(000)001
【总页数】2页(P37-38)
【作者】胡平
【作者单位】吉林大学汽车动态模拟国家重点实验室
【正文语种】中文
【中图分类】U463.82
【相关文献】
1.汽车车身用试制模具与量产模具对比研究 [J], 李正其;陈晓磊;曹力丰;杨月斌
2.影响汽车车身模具开发周期和模具质量的关键因素 [J], 杨珂;周多营
3.汽车车身与模具虚拟设计仿真技术 [J], 胡平
4.提能力强合作促发展——第一届车身模具国际化与高质量发展工作会议暨2019年中国模具工业协会车身模具委员会年会成功举办 [J],
5.基于局部逆向工程的汽车覆盖件模具虚拟设计 [J], 张浩立;罗继相
因版权原因,仅展示原文概要,查看原文内容请购买。
吉林大学硕士研究生学位论文

吉林大学硕士研究生学位论文
第一章绪论
1.1 课题的提出
1.1.1 无陀螺仪式惯性导航系统的提出 汽车具有更好的舒适性、更强的安全性以及满足节能环保等要求是汽车工业 发展永恒的主题。而智能辅助驾驶车辆致力于提高汽车的舒适性,安全性和提供 优良的人车交互环境,是目前各国重点发展的智能交通系统中的一个重要组成部 分,也是世界汽车工程领域的研究热点和汽车工业增长的新动力。智能辅助驾驶 车辆是一种集环境感知,规划决策,多等级辅助驾驶功能于一体的综合系统。它 集中采用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术, 是典型的高新技术综合体。一个典型的智能辅助驾驶汽车的结构如图 1.1。
I
第五章 算法的试验验证
的。要达到控制的目的,就要知道车辆位置等车辆状态,惯性信息(如方向角、 速度、角速度、线加速度、角加速度等) ,并且要以高采样率获得(>100HZ) 。惯 性导航系统INS(Inertial Navigation Systems)就是这样一种完全自动确定运动参数 的新型系统。它通常采用微积分的方法,即由加速度计测得车辆的线加速度,然 后积分得到速度,位移,同时与使用陀螺仪测量得到的车辆角速度信息一起得到 完整的车辆状态信息并提供给车辆,以达到控制车辆运行的目的。 随着 INS 微型化和高精度趋势的挑战,便宜的陀螺仪缺乏精确导航所需要的 精度,而较高精度的陀螺仪价格非常昂贵。而且,由于其结构的限制,其微型化 有一定的难度 ([2],[4])。在另一方面,一个精确的微机电系统 MEMS (Micro-Electro-Mechanical System ) 加速度计是可行的。事实上这种类型的 加速度计已经有了许多应用 (如微型多体硅加速度计)[5] 。由于近年来在 MEMS 技 术方面的突破性进展,微型机电加速度计价格在精度提高的同时不断下降。已经 有研究表明这个趋势还将继续([3],[8])。 而且在技术上和物理结构方面有比陀螺仪更 少的限制。因而,开发基于加速度计的惯性导航系统有着潜在的市场前景。所以 本文提出了无陀螺仪式惯性导航系统(GF-INS)的研究这个课题。即研究设计一个 基于加速度计的无陀螺仪式惯性导航系统,通过固定在车体上的若干个加速度计 的输出值,利用其核心导航算法实时的得出我们需要的车辆状态信息。 1.1.2 微机电系统技术简介 从二十世纪 90 年代开始,微机电系统技术逐渐引起世界各国政府的高度重 视。正如二十世纪具有信号处理功能的微电子技术彻底改变了人类的生产生活方 式一样,MEMS 技术,将成为新世纪的高技术竞争热点。MEMS 是在集成电路生 产技术和专用的微机电加工方法的基础上蓬勃发展起来的高新科技,其研究开发 主要集中在微传感器、微执行器和微系统三个方面,目前主导 MEMS 市场的传感 器已形成产业。用此技术研制的五花八门的微传感器具有体积小、质量轻、响应 快、灵敏度高、易生产、成本低的优势,可以测量各种物理量、化学量及生物量。 在市场引导、科技推动、风险投资、政府介入等多重作用下,汽车 MEMS 传感器 发展迅速,现已成为相关部门争先投资开发的热点。在高档汽车中,大约采用 25 至 40 只 MEMS 传感器,技术上日趋成熟完善,可满足汽车环境苛刻、可靠性高、 精度准确、成本低的要求,极大地推动了电子技术在汽车上的应用。 完整的 MEMS 是由微传感器、微执行器、信号处理和控制电路、通讯接口和 电源等部件组成的一体化的微型器件系统。其目标是把信息的获取、处理和执行
汽车动态模拟国家重点实验室(吉大)
汽车动态模拟国家重点实验室(吉大)汽车动态模拟国家重点实验室(拟更名为汽车仿真与控制国家重点实验室)是1989 年国家批准利用世界银行贷款建设的国家重点实验室,于1996 年12 月通过国家验收,自1997 年1 月对外开放。
实验室依托单位为吉林大学,主管部门为教育部。
实验室的主要研究方向是“人—车—环境闭环系统的仿真与控制”,主要探讨汽车、人与环境的建模以及彼此之间的相互作用规律,着重研究汽车设计过程中的主动措施,控制整车及其总成部件的特性,从而提高人—车—环境闭环系统的安全、舒适、低公害和节能等整体效益。
经过多年的建设和发展,实验室已拥有较好的试验条件及经验丰富的科教和技术队伍,取得了一系列高水平的研究成果,形成5 个各有特色的研究方向:( 1 )人- 车闭环系统的仿真与控制。
该方向从事驾驶员、乘员与行人行为特性建模与仿真,人与汽车之间的关系,汽车整车性能的闭环评价方法,汽车仿真设计方法等研究工作;(2 )汽车系统的仿真与控制。
该方向应用振动分析理论、多体动力学理论、有限元分析理论,计算机仿真以及实验测试技术,着重研究汽车系统及其总成部件的建模、仿真及先进的汽车底盘总成控制机理;(3 )汽车地面系统的建模与仿真。
该方向从事轮胎特性、地面和道路交通环境特性建模与仿真等应用基础和共性技术的研究工作;(4 )汽车动力传动系统的仿真与控制。
该方向研究机械传动、液压传动、液力传动、CVT 传动、混合动力传动、电力(电动和燃料电池)传动和牵引力控制等在汽车上应用的关键技术,通过构筑汽车电子控制技术的试验平台,建立汽车动力传动系统控制理论和开发实用的产品;(5 )汽车车身与空气动力学的建模与仿真。
该方向从事汽车造型、汽车空气动力学、汽车车身CAD/CAE/CAM 一体化技术和人机工程学在车身中的应用等研究工作。
在“整体系统自行设计与集成,关键部件国外引进,一般部件国内配套,软件自行开发”的总体方案指导下,实验室成功地研制了我国首台开发型汽车驾驶模拟器。
adas仿真场景标准

adas仿真场景标准自动驾驶系统(ADAS)的发展迅猛,为了确保其在不同场景下的安全性和稳定性,需要建立一套标准的仿真场景。
本文将探讨adas仿真场景标准的重要性并提出建议。
一、概述adas仿真场景标准是指一套规范,用于模拟真实道路场景,测试和评估ADAS的性能。
标准的建立不仅可以提高仿真测试的效率和准确性,还能降低实地测试的成本和风险。
二、标准内容(一)场景分类针对adas系统的测试需求,可以将仿真场景分为以下几类:1. 常规道路场景:包括城市道路、乡村道路等各类日常驾驶场景;2. 特殊道路场景:包括高速公路、山区道路、隧道、桥梁等特殊道路条件下的驾驶场景;3. 天气场景:包括晴天、阴天、雨天、雪天等各类天气条件下的驾驶场景;4. 特殊行为场景:包括交叉口、人行横道、自行车道、公交专用道等特殊驾驶行为场景。
(二)场景要素每个场景都有不同的要素需要考虑,包括但不限于:1. 道路结构:道路宽度、弯道半径、斜坡等;2. 交通标识和线标:路标、交通信号灯、车道线等;3. 路况情况:堵车、拥堵、道路损坏等;4. 车辆行为:加速、减速、刹车等;5. 天气情况:晴天、阴天、雨天、雪天等。
(三)场景变化标准中需要考虑不同场景下的变化情况,比如路况的实时变化、车辆的随机行为、天气条件的变化等。
这些变化可以通过算法模拟,确保仿真场景的真实性和多样性。
三、制定标准的意义adas仿真场景标准的制定对于ADAS系统的开发和测试具有重要意义。
(一)效率和准确性标准化的仿真场景可以提高测试效率,减少重复测试的工作量。
同时,标准的场景设置可以减少人为主观因素的干扰,提高测试结果的准确性。
(二)降低成本与风险通过标准的仿真场景测试,可以降低实地测试的成本和风险。
实地测试需要投入大量的人力和物力资源,并且存在一定的安全风险。
标准化的仿真场景可以在更早的阶段发现问题,减少实地测试的次数和风险。
(三)提高安全性ADAS系统关乎交通安全,因此对其性能和安全性的测试十分重要。
汽车ESP硬件与驾驶员在回路仿真试验台的开发与应用_百概要

2006年 (第 28卷第 4期汽车工程 A uto m otive Eng i neer i ng2006(V o. l 28 N o . 42006075汽车 ESP 硬件与驾驶员在回路仿真试验台的开发与应用**吉林大学 /985工程 0汽车工程创新平台和吉林大学青年教师基金资助。
日丁海涛 , 郭孔辉 , 张建伟 , 付皓 , 吕济明(吉林大学 , 汽车动态模拟国家重点实验室 , 长春 130025[摘要 ] 利用汽车驾驶模拟器技术和硬件在回路仿真技术 , 建立了汽车电子稳定性系统 (ESP 硬件与驾驶员在回路仿真试验台。
利用该试验台进行了包含 ESP 执行硬件和驾驶员的 /人车 0闭环仿真 , 验证了试验台的基本功能。
该试验台为汽车 ESP 的开发提供了一个功能比较完备的快速开发平台。
关键词 :汽车电子稳定性系统 , 硬件在回路仿真 , 驾驶模拟器D evel op m ent and App li cation of the H ard ware and D ri ver -i n -the -loopTest R i g for Au t o m oti ve E lectronic Stab ilit y Progra m sD ing H aitao , Guo K onghu, i Zhang Jianwe, i Fu Hao&L ôJi m ingJ ilin Un i v ersit y , S tate K e y Labora tory of Au to mobile Dynam ic S i mu l a tion, Changchun 130025[Abstrac t ] A har dw are and dri v er -i n -the -l o op test ri g for auto m o ti v e e lectron ic stability prog ra m s (ESP is built based on t h e techno log ies o f driv i n g si m u lator and hardw are -i n -the -loop si m ulati o n . A /hum an -vehic le -env-i ronm en t 0closed -loop si m ulation is conducted on the test ri g . The resu lt verifies the basic functi o ns of test rig ,w hich provides a rapi d develop m ent p latfor m for auto m otive ESP .K eyw ords :Auto m otive ESP , H ardware -i n -t he -loop si m ulation , D riving si m ul a tor1 前言汽车电子稳定性系统 (electr onic stability pro -gra m , ESP 是一种提高汽车主动安全性的电子控制系统。
面向智能驾驶测试的仿真场景构建技术综述
面向智能驾驶测试的仿真场景构建技术综述随着汽车智能化程度的不断提高,智能汽车通过环境传感器与周边行驶环境的信息交互与互联更为密切,需应对的行驶环境状况也越来越复杂,包括行驶道路、周边交通和气象条件等诸多因素,具有较强的不确定性、难以重复、不可预测和不可穷尽。
限于研发周期和成本、工况复杂多样性,特别是安全因素的考虑,传统的开放道路测试试验或基于封闭试验场的测试难以满足智能驾驶系统可靠性与鲁棒性的测试要求。
因此,借助数字虚拟技术的仿真测试成为智能驾驶测试验证一种新的手段,仿真场景的构建作为模拟仿真的重要组成部分,是实现智能驾驶测试中大样本、极限边界小概率样本测试验证的关键技术,这对提升智能驾驶系统的压力和加速测评水平显得尤为重要。
面向智能驾驶测试的仿真场景构建技术已成为当前汽车智能化新的研究课题和世界性的研究热点,作为一种新兴技术仍面临许多挑战。
随着汽车智能化和共享化程度的不断提高,智能驾驶汽车通过环境感知与周边行驶环境的交互也在不断增多,行驶环境已成为智能驾驶不可分割的重要组成部分。
汽车的行驶环境涉及道路、气象条件和交通状况,其复杂性和动态变化是影响汽车智能驾驶系统性能最为关键的因素。
因此,建立一种模拟和重现复杂开放行驶环境的仿真测试方法和系统,实现对汽车智能驾驶有效的测试验证,是汽车智能驾驶技术与产品开发的关键技术,对于提升汽车智能化水平尤为重要。
汽车行驶环境包括行驶道路、周边交通和气象条件等诸多因素,其高逼真的重现和构建面临诸多挑战。
随着智能驾驶功能的不断增强,汽车需应对的行驶环境越来越复杂,环境高度的不确定性、难以重复、不可预测和不可穷尽等特征使得有限的场地和道路测试远远无法复制、重现或穷举行驶环境对智能驾驶系统的影响。
一方面,限于研发周期和成本,现有的封闭场地测试和开放道路测试不仅周期长、成本高,无法满足对系统数十亿公里行程的大样本和可靠性测试要求。
另一方面,与汽车行驶安全测试密切相关的极限危险工况属于小样本、小概率事件,开放的道路测试往往难以复制,测试安全也无法保障。
清华大学——自动驾驶汽车平台技术基础第二册第6章

、并道等;
4)3D展示
• 基于红绿灯信号:包括红灯、黄灯、绿灯。 • 提供实时路况,包括当前车道、
红绿灯、限速;
2)场景运行与算法上传
• 算法模块输出的可视化信息,包
• 支持同时多场景的高速运行;
括路径规划、动态障碍物、规划
• 支持单算法模块的上传运行;
轨迹等;
• 提供整车环境的单个模块的仿真结果;
仿真执行模式
支持同时高效运行多个场景。 支持在Apollo环境中验证一个或多个模块。
自动驾驶汽车仿真平台
Apollo仿真平台使用简介
当前版本启用以下评分指标: 碰撞检测、红灯违规检测、超速检测、越野检测
、到达测试、硬制动检测、加速测试、路由寻径 测试、结点检测中的变道行为、人行横道上的行 人避让、紧急制动、停车标志处停车。
自动驾驶汽车仿真平台
Apollo仿真平台特点:
1)内置高精地图的仿真场景
3)智能的场景判别系统
• 基于路型:包括十字路口、调头、直行、弯道 目前开放了多个判别标准:碰撞检
等;Biblioteka 测、闯红灯检测、限速检测、在路
• 基于障碍物类型:包括行人、机动车、非机动 检测、到达目的地检测等。
车等;
• 基于道路规划:包括直行、调头、变道、转弯
自动驾驶汽车仿真平台
典型仿真平台介绍——Apollo仿真平台
在Apollo中,对仿真平台的定位是不仅仅是真实,而是要能够进一步展现智能汽 车算法中的问题。
因为在整个算法迭代闭环中,光贴合真实场景是不够的,还需要能够发掘问题,发 现了问题后才能去修正问题。 开发过程从开发到仿真再回到开发,仿真平台跟开发过程应串联成一个闭环。只
自动驾驶汽车仿真平台
《2024年自动驾驶测试与评价技术研究进展》范文

《自动驾驶测试与评价技术研究进展》篇一一、引言随着人工智能技术的不断发展和汽车行业对创新的渴求,自动驾驶技术成为了现代科技领域的焦点之一。
在不断进步的算法、高精度传感器以及先进的软件框架支持下,自动驾驶技术的测试与评价体系也逐渐趋于成熟和完善。
本文将深入探讨自动驾驶测试与评价技术的研究进展。
二、自动驾驶技术的关键技术与特点自动驾驶技术涵盖了传感器、人工智能算法、通信等多个领域。
通过先进的雷达、激光雷达(LiDAR)、GPS和机器视觉等技术,车辆可以自主地感知周围环境,并基于复杂的算法做出决策和执行动作。
其特点在于高度自动化、高效率以及安全性。
三、自动驾驶测试技术的发展1. 仿真测试技术:利用虚拟环境模拟真实道路场景,对自动驾驶系统进行测试。
仿真测试技术可以模拟各种复杂路况和天气条件,大大缩短了开发周期和成本。
随着技术的进步,仿真测试的精确度和可靠性不断提高,成为当前自动驾驶测试的重要手段。
2. 实际道路测试:在特定封闭或开放道路进行实际驾驶测试,通过实地数据来验证和优化算法。
实际道路测试能够更真实地反映自动驾驶系统的性能,并发现潜在问题。
四、自动驾驶评价体系的建立1. 安全性评价:通过多种测试手段评估自动驾驶系统的安全性能,包括故障率、事故率等指标的评估。
同时,结合法规要求,确保系统在各种场景下的安全运行。
2. 性能评价:对自动驾驶系统的响应速度、决策准确性、行驶平稳性等性能指标进行评价。
通过与人类驾驶员的驾驶行为进行对比,优化系统性能。
3. 用户体验评价:关注用户对自动驾驶系统的接受程度和满意度,包括系统的易用性、舒适性等方面。
通过用户反馈来不断改进和优化系统。
五、自动驾驶测试与评价技术的最新研究进展1. 智能化的测试方法:随着人工智能技术的发展,越来越多的智能化测试方法被应用于自动驾驶系统的测试与评价中。
例如,利用深度学习算法对复杂道路场景进行识别和预测,提高测试的准确性和效率。
2. 多模态传感器融合技术:多模态传感器融合技术能够提高自动驾驶系统对环境的感知能力,包括对行人、车辆、交通信号灯等的识别和判断。
最新汽车行业论文参考文献推荐(3)

最新汽车行业论文参考文献推荐(3)[94]徐娟。
基于二元技术能力调节作用的技术多元化与企业绩效[J]. 管理学报,2017,(01):63-68.[95]陶雷。
碳纤维复合材料汽车传动轴结构优化及性能评价[D].东华大学,2017.[96]钱堃。
电动汽车声品质评价分析与控制技术研究[D].吉林大学,2016.[97]李雪。
城市垃圾车智能控制系统设计与开发[D].湖北工业大学,2016.[98]苗强,孙强,白书战,闫伟,李国祥。
基于聚类和马尔可夫链的公交车典型行驶工况构建[J]. 中国公路学报,2016,(11):161-169.[99]郭燕青,何地。
网络视角下战略性新兴产业技术创新小生境演化研究--以中国新能源汽车产业为例[J]. 科技进步与对策,2017,(02):64-71.[100]蔡之钰,游田,李先庭。
活体动物运输车厢空气流动及传热特性模拟与优化[J]. 农业工程学报,2016,(20):223-228.[101]王冬良,陈南,刘远伟,季丰。
电动汽车轮毂电机-双横臂悬架系统设计与优化[J]. 机械设计与制造,2016,(10):99-103.[102]李泓,郑杰允。
发展下一代高能量密度动力锂电池--变革性纳米产业制造技术聚焦长续航动力锂电池项目研究进展[J]. 中国科学院院刊,2016,(09):1120-1127+971.[103]田晟,裴锋,李拾成。
纯电动汽车上下电及电池管理系统故障控制策略[J]. 华南理工大学学报(自然科学版),2016,(09):107-115.[104]王小峰,于志民。
中国新能源汽车的发展现状及趋势[J]. 科技导报,2016,(17):13-18.[105]郑天骄。
我国电动汽车行业发展现状与展望[J]. 中国新技术新产品,2016,(17):137-139.[106]黄朝宗,刘向农,陈恩林。
热泵型电动汽车空调系统设计和实验研究[J]. 低温与超导,2016,(08):55-61.[107]程一卿,莫凡,彭亚南。
ADAS研发与测试的模拟仿真技术---吉林大学

能和产品的研发的比重已经高达70%以上-- *Automotive Wikipedia
Requirement-Driven Processes
以需求为驱动的开发流程
现代汽车技术研发先进方法、理念和流程
基于先进的研发理念
Math-Based Platforms
基于数学模型的开发平台
Model-Based Approaches
基于模型的开发方法
Requirement-Driven Processes
以需求为驱动的开发流程 先进的开发理念与流程
基于先进的研发平台
Pure Simulation
离线纯仿真平台
RT-SIL/HIL Simulation
实时、软硬件在环仿真平台
工具 技术理念、方法和流程的关键 --- Charles F. Kettering,
great American inventor, engineer & businessman
Time cover
“ 工欲善其事必先利其器 ”--- 孔子《论语·魏灵公》
1933
自上世纪90年代起,模拟仿真和数字虚拟化技术已经成为了 汽车研发过程
大雾天气
为什么模拟与仿真? 成本需求
基于模拟仿真技术的虚拟研发是 节省研发成本的关键途径,也是 当今世界技术研发的主流趋势 $500
$5,000
相对成本
$50
$5
需求定义
模拟仿真
产品原型
产品开发
为什么模拟与仿真?技术切实可行
模拟仿真技术不仅必要、而且可能/可行
随着计算机、电子技术的成熟,数学模型的精确性和数值求 解能力的不断提高:数学模型也越来越接近真实的物理世界: 车辆动力学模拟 环境模拟(道路、交通与天气等) 环境传感模拟(虚拟相机、雷达和无线通信等) 驾驶员模拟
汽车驾驶模拟器人机交互控制系统优化设计
4AUTO TIMEFRONTIER DISCUSSION | 前沿探讨汽车驾驶模拟器人机交互控制系统优化设计郑玲玲 郭学立 罗兰吉林大学汽车仿真与控制国家重点实验室 吉林省长春市 130000摘 要: 吉林大学汽车工程学院汽车仿真与控制国家重点实验室建设了开发型驾驶模拟器系统人机交互能力不足,本文开展了人机交互控制系统优化研究,采用键盘硬件控制方式,利用模块化设计思路,利用嵌入式工控机平台,搭建任务及指令执行器系统,并建立相应的功能模块,包括键盘、人机界面、主控单元、功能数据库等。
解决了多平台并发仿真中存在的数据通信、时钟同步、仿真监控问题,优化了集成平台的性能。
关键词:驾驶模拟器 人机交互控制 优化吉林大学汽车工程学院汽车仿真与控制国家重点实验室建设了开发型驾驶模拟器系统,该系统结构复杂、命令繁多,主要由动力学系统、声响系统、图像系统、运动控制系统、数据记录系统、交通仿真系统及监控系统等子系统组成,能够为驾驶员提供真实的人-车操作界面,并在模拟器上复现试验工况,另外它还支持任意嵌入实物的试验,为驾驶模拟器开发嵌入式系统提供了基础。
模拟器通过嵌入式开发平台实现了嵌入式台架与驾驶模拟器的数据集成。
搭建了制动嵌入式模型,实现了嵌入式台架传感、执行机构的标定与建模。
解决了多平台并发仿真中存在的数据通信、时钟同步、仿真监控问题,优化了集成平台的性能。
目前的模拟器系统人机交互能力不足,模拟器系统的配置、集成及各个子系统控制主要是在监控系统中手工输入命令字串的方式进行,例如在切换车辆场景时,需要在嵌入式软件中人工键入二十余条代码,这样既浪费时间,又容易出现键入错误,同时对操作人员的要求过高,不适合于设备交付客户使用,更难进行后期二次开发。
针对上述问题,本文开展了人机交互控制系统优化研究,采用键盘硬件控制方式,利用模块化设计思路,保证各模块可单独使用,并用于课外实验、大创项目中,脚本数据库根据实际操作平台进行设计,可以保证科研人员进行快速二次开发,提高模拟器系统的综合设计能力。
一种ADAS路径规划功能实验室测试系统及方法[发明专利]
![一种ADAS路径规划功能实验室测试系统及方法[发明专利]](https://img.taocdn.com/s3/m/39f02588ddccda38366bafbe.png)
专利名称:一种ADAS路径规划功能实验室测试系统及方法专利类型:发明专利
发明人:马林娜,付海东
申请号:CN201911282763.9
申请日:20191213
公开号:CN111007834A
公开日:
20200414
专利内容由知识产权出版社提供
摘要:本发明公开了一种ADAS路径规划功能实验室测试系统及方法,该测试系统包括:HIL系统和导航信号模拟器,HIL系统根据智能车辆的行驶路径信息,得到智能车辆对应的仿真车辆的道路环境以及行驶路径,并仿真得到仿真车辆的实时经纬度坐标,通过导航信号模拟器实现对仿真车辆的导航信号的模拟,进而对实现被测ADAS控制器的定位模拟。
本发明可以提供精确、可信且可重复的信号和干扰效应,无需人员驾驶车辆,因此,路径规划功能测试的风险低,成本低,测试环境具备重复性,可以作为ADAS控制器开发验证阶段可靠且统一的测试手段,且不会对被测ADAS控制器的工作性能造成影响,并提高了测试效率。
申请人:北京经纬恒润科技有限公司
地址:100101 北京市朝阳区安翔北里11号B座8层
国籍:CN
代理机构:北京集佳知识产权代理有限公司
代理人:薛娇
更多信息请下载全文后查看。
科技成果——运动的在线模拟与同步记录技术
科技成果——运动的在线模拟与同步记录技术
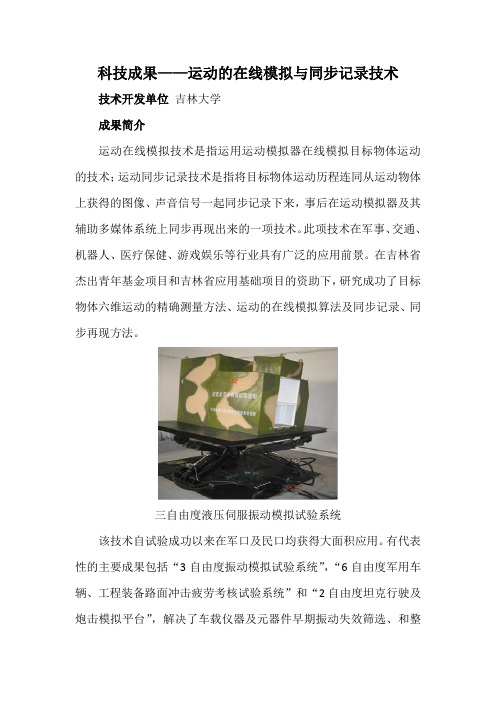
技术开发单位吉林大学
成果简介
运动在线模拟技术是指运用运动模拟器在线模拟目标物体运动的技术;运动同步记录技术是指将目标物体运动历程连同从运动物体上获得的图像、声音信号一起同步记录下来,事后在运动模拟器及其辅助多媒体系统上同步再现出来的一项技术。
此项技术在军事、交通、机器人、医疗保健、游戏娱乐等行业具有广泛的应用前景。
在吉林省杰出青年基金项目和吉林省应用基础项目的资助下,研究成功了目标物体六维运动的精确测量方法、运动的在线模拟算法及同步记录、同步再现方法。
三自由度液压伺服振动模拟试验系统
该技术自试验成功以来在军口及民口均获得大面积应用。
有代表性的主要成果包括“3自由度振动模拟试验系统”,“6自由度军用车辆、工程装备路面冲击疲劳考核试验系统”和“2自由度坦克行驶及炮击模拟平台”,解决了车载仪器及元器件早期振动失效筛选、和整
车耐震性能测试的问题。
其中的运动模拟器可依据需求量体裁衣,定制二自由度、三自由度、六自由度等不同的结构形式,驱动单元可任选电动伺服和液压伺服。
六自由度电动伺服军用车辆整车激振试验平台
两自由度电动伺服坦克行驶及炮击模拟试验平台获奖情况
该技术2006年获得吉林省科技进步一等奖。
ADAS实验平台转向路感模拟的实现
ADAS实验平台转向路感模拟的实现
石晶;许广吉
【期刊名称】《机械设计与制造》
【年(卷),期】2022()5
【摘要】搭建ADAS实验平台中,由于驾驶模拟器与传统汽车的转向系统结构不同,驾驶模拟器的转向系统只有方向盘、转向管柱、转角传感器。
因此,在仿真过程中,驾驶人员在驾驶模拟器操作方向盘时,需要将路面的力反馈到方向盘上,以此让驾驶员感受当前路径情况,最终来实现模拟车辆给定期望路径或驾驶意图。
故需要采用路感电机搭建路感系统。
这里通过确定方向盘力矩反馈模型的成分,以及仿真车辆与产生方向盘力矩有关的参数;根据影响方向盘力矩因素和车辆相关的车辆参数搭建模型产生力矩。
同时,这里也提出在不同的车速的情况下来产生力矩反馈。
最终,通过CAN通信把产生方向盘力矩传递给路感电机,以此来实现转向路感的模拟。
【总页数】4页(P29-32)
【关键词】ADAS实验平台;反馈力矩建模;路感电机;CAN通信
【作者】石晶;许广吉
【作者单位】辽宁工业大学研究生学院
【正文语种】中文
【中图分类】TH16
【相关文献】
1.线控转向系统路感模拟控制研究
2.线控转向系统路感模拟控制研究
3.线控转向系统路感模拟与主动回正控制
4.一种新型线控转向路感模拟器的设计
5.线控转向系统变角传动比设计及路感模拟
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Requirement-Driven Processes
以需求为驱动的开发流程
现代汽车技术研发先进方法、理念和流程
基于先进的研发理念
基于数学模型的开发平台
Math-Based Platforms
Model-Based Approaches
基于模型的开发方法
Requirement-Driven Processes
*CarSim是国际上公认的顶级车辆动力学仿真软件
仿真工况:车速80km/h
-40
0
1
2
3
4
5 Time [s]
6
7
8
9
10
方向盘转角输入
15 Carsim Panosim 10
0.4 0.3 0.2 Carsim Panosim
5
Lateral Acceleration [g]
Yaw Rate [deg/s]
150
方向盘转角输入
目标路径与实际路径对比
PanoSim:高精度车辆动力学模型
鱼钩仿真工况(与CarSim对比高度一致)
30 Carsim Panosim 20
0.8 0.6 Carsim Panosim
侧向加速度
10
Lateral Acceleration [g]
1
Longitudinal velocity [km/h]
基于模拟仿真技术的虚拟研发是 节省研发成本的关键途径,也是 当今世界技术研发的主流趋势 $500
$5,000
相对成本
$50
$5
需求定义
模拟仿真
产品原型
产品开发
为什么模拟与仿真?技术切实可行 模拟仿真技术不仅必要、而且可能/可行
随着计算机、电子技术的成熟,数学模型的精确性和数值求 解能力的不断提高:数学模型也越来越接近真实的物理世界: 车辆动力学模拟 环境模拟(道路、交通与天气等) 环境传感模拟(虚拟相机、雷达和无线通信等) 驾驶员模拟 试验可重复、可灵活设置、可自动化 易于分析、理解,和发现系统内在关联 安全!!
汽车行驶环境感知系统开发
视觉传感与模式识别 雷达探测与障碍物 传感数据融合 主动避撞 车道纠偏
汽车电控系统设计与开发
汽车主动安全系统开发 下一代智能交通系统
车车协同、车路协同 智能交通管理系统 无人驾驶
PanoSim (VehicleBuilder):车辆模拟
运动状态 空气阻力
Modeling on Battery and Electric Motors, onboard communication
驾驶员
电化学 电磁学 电机学等
车辆多刚体 动力学
力学/机械学 计算机图学 weather road 图像处理 信号处理 电磁波 camera wireless 无线通信等
汽车功能、技术和产品的 研发、测试和验证
一体化仿真平台
PanoSim:应用领域
汽车智能辅助驾驶系统开发 汽车底盘和整车性能开发 汽车动力性能开发
自动泊车 自适应巡航系统 驾驶员人机交互
制动、转向和悬架 动力学、舒适性、操控稳定性 发动机、变速箱、传动系 动力性、燃油经济性、排放 防锁死和防滑制动控制 车辆稳定性控制等
0.1 0 -0.1 -0.2
0
-5
-10
-0.3 -0.4
-15
0
1
2
3
4
5 Time [s]
6
7
8
9
10
0
1
2
3
4
ቤተ መጻሕፍቲ ባይዱ5 Time [s]
6
7
8
9
10
横摆角速度
侧向加速度
PanoSim:高精度车辆动力学模型
鱼钩仿真工况(与CarSim对比高度一致)
仿真工况:车速80km/h。方向盘转角和路径如下
300 Carsim Panosim 200
为什么模拟与仿真? 技术需求
研发 设计
汽车技术及产品 前期研发
虚拟数字化
汽车技术及产品 设计 汽车技术及产品 测试与验证
半虚拟数字化
测试 制造
汽车产品 批量生产
实物化
为什么模拟与仿真? 技术趋势
汽车产品的竞争关键在于技术的竞争,而工具链是决定
技术理念、方法和流程的关键 --- Charles F. Kettering,
20 Carsim Panosim
0
Steering Wheel Angle [deg]
-20
100
Y Coordinate [m]
0 1 2 3 4 5 Time [s] 6 7 8 9 10
-40
0
-60
-100
-80
-200
-100
-300
-120
0
50 X Coordinate [m]
100
自动生成MDL模型
高效实时数值计算
PanoSim:画图与动画后处理工具
PanoPlot
PanoAnim
模型验证
PanoSim:高精度车辆动力学模型
40
双移线工况(与CarSim对比高度一致)
Steering Wheel Angle [deg]
30 20 10 0 -10 -20 -30
Carsim Panosim
PanoSim:6大模块、N多功能
实验设置主界面 车辆编辑器 画图与动画工具 场景编辑器 像机雷达安装器 模型自动生成工具
车辆动力学模拟 道路与场景模拟
雷达与像机模拟 无线通信模拟
交通与设施模拟 天气与光照模拟
PanoSim:应用领域
汽车性能设计、开发与验证
(道路、交通、环境、天气等)
虚拟行驶环境
(ABS/ESP/ACC, 避撞、泊车等)
虚拟行驶工况
(雷达、像机、GPS/地图、无线通信等)
模拟环境传感
(车、行人、障碍物等)
模拟交通参与物
汽车智能辅助驾驶与主动安全
PanoSim:应用领域
概念 设计 原型样 机设计 原型样 机定型
整车系统与 性能匹配 子系统 测试与验证 系统功能 集成与验证
轨迹规划
控制器 控制策略
智能决策
规划决策
ADAS研发:为什么模拟与仿真?
涉及人-车-环境闭环系统(交通、天气和道路) 传统的研发、测试和验证方法和手段已不能适应 传统的汽车模拟仿真技术和工具已不能满足要求
驾驶员
人-车-环境
环境
交通
车
天气
道路
为什么模拟与仿真? 技术需求
车车协同 车辆避撞
力 路形
运动 载荷
轮胎动 力学模型
摩擦 系数
VehicleBuilder
高精度车辆动力学模型
PanoSim (FieldBuilder) :汽车行驶环境模拟
汽车三维行驶场景模拟
PanoSim (FieldBuilder) :汽车行驶环境模拟
天气模拟
PanoSim (FieldBuilder) :汽车行驶环境模拟
吉林大学 汽车仿真与控制国家重点实验室
张素民
1
报告提纲
一、汽车智能化模拟仿真技术的背景
二、汽车智能化模拟仿真的关键技术
三、模拟仿真软件展示:PanoSim
汽车智能化的关键技术与挑战
人-车-环境闭环控制系统:多传感输入、多控制输出复杂人机共驾系统
行驶环境
传感感知
行驶环境 传感
低成本约束和复杂环境下的快速、准确、可靠的环 数据融合 车辆 执行器 人机 境传感感知技术 汽车状态 传感 共驾 和谐、友好、直观的人机协同、交互和共驾技术 安全、可靠、高效、灵活且低成本的测试验证技术
试验周期长、成本高,安全无法保障是汽车智能化技术研发 、测试和验证的关键技术瓶颈
智能汽车
车路协同
行人避撞
为什么模拟与仿真? 技术需求
复杂道路结构 雪天
试验行驶环境不可预测、难以复制、缺乏灵活性、不可自动 化等是研发汽车智能化技术的另一瓶颈
雨天
晚上
恶劣行驶工况
大雾天气
为什么模拟与仿真? 成本需求
V2V与V2X模拟
基于地理位置信 息多跳路由技术 的IVC和RVC通信 WLAN 5GHz 应用于道路交通 安全的IVC和RVC 通信 便携式互联 网 蜂窝网 停车场 热点 无线电发射塔 大厦 无线电发射塔 卫星 DMB GPS 基于802.11、 GSM、UMTS、 IR、IPv6等无线 通信技术的交通 系统和互联网服 务(包括IVC和 RVC通信) 应用于交通流量 控制的IVC和RVC 通信 便携式互联 网 蜂窝网
虚拟道路建造
道路纹理与车道线模拟
交通标识模拟
PanoSim (FieldBuilder) :汽车行驶环境模拟
交通流模拟
光照模拟
道路与车道模拟
PanoSim:像机模拟
鱼眼与广角像机验证
鱼眼与广角像机模拟
PanoSim:像机模拟
模糊模拟
色差模拟
PanoSim:像机模拟
暗角模拟
畸变模拟
PanoSim:像机模拟
以需求为驱动的开发流程 先进的开发理念与流程
基于先进的研发平台
Pure Simulation
离线纯仿真平台
RT-SIL/HIL Simulation
实时、软硬件在环仿真平台
DIL with 3D Environment
驾驶员在环三维场景仿真
In-Vehicle Test
实验车试验/标定/验证
汽车模拟与仿真技术正不断发展