计算机导航在骨科手术中的应用
如何理解计算机导航系统在骨肿瘤手术中的作用
方案 , 主要体现在 : 1 基于肿瘤术前 C 、 R 等影像 () TM I
学检 查进 行精 准 的设 计 , 定 肿 瘤 切 除 范 围;2 采 用 确 () Mi c mi s等设计 软 件 模 拟 肿 瘤 切 除后 骨 缺 损 , 并进 行 重 建设 计 ;3 术 中图像 配准 以及 与 术 前 图像 进 行 融合 , ()
解 剖 变异或 各 种 原 因所 致 的解 剖 标 志 缺 乏 , 往 会 给 往
方案也很难做到完全 的统一, 计算机 导航辅助技 术在 某 种程 度上 可 以使 手 术 具 有 统 一 性 , 因为手 术 需 要 遵 循相同的标准, 中具有客观 的参数记录, 于术后评 术 便
价 和分 析 , 利于 类似 手术 的质 量控 制 。 有 由于计 算机 导 航 辅 助 技 术 需 要 术 前 计 划 , 中 需 术 要再注 册 , 以及 术 中 的 实 时监 控 , 于 手 术 医 师 , 论 对 不 是低 年 资还 是 高 年 资 , 可 以通 过 虚 拟 的 肿 瘤 三 维 结 都 构 与现 实解 剖 结 构 进 行 拟 合 , 时修 正 自己的 错 误 主 随 观 想法 。 因此 , 一 技 术 可 以使 低 年 资 医 师 更 快 地 意 这
术 前设 计进 行 , 有 偏 离 既定 的 术 前 计 划 。对 于 骨 肿 没 瘤 手术 , 由于肿 瘤 患 者 的个 体 特 异 性 和 手 术 医 师 的 经 验 和体会 不 同, 即使 是 在 同一个 骨 肿瘤 治疗 中心 , 术 手
肿瘤 的立体特征 , 确定手术部位。但是, 如果 患者存在
中华 临床 医师 杂 志 ( 子版 )02年 6月 第 6卷 第 1 电 21 2期
C i Cii as Eet ncE io )Jn 52 1 , o. , o1 hnJ l c n( l r i dt n , e1 , 2 V 16 N .2 ni co i u 0
手术室护理人员使用计算机导航追踪定位技术配合骨科手术的方法
手术室护理人员使用计算机导航追踪定位技术配合骨科手术的方法作者:金永红朱方园来源:《护理实践与研究》 2014年第3期作者单位:214001无锡市南京中医药大学附属无锡市中医医院金永红:女,本科,副主任护师金永红朱方园摘要目的:使用计算机导航追踪定位技术配合骨科医师完成导航辅助骨科手术方法。
方法:对30例骨科患者实施计算机导航辅助骨科手术,手术室护理人员采用导航追踪定位,即导航设备的安装连接、导航定位的追踪、出现问题的处理及纠正等方法进行配合。
结果:手术过程顺利,30例骨科患者成功实施计算机导航辅助下的骨科手术。
结论:护理人员通过计算机导航追踪定位技术的学习与培训,不断开阔视野,更新观念,提高自身素质,能积极应对高难度及高新技术的开展。
关键词护理人员;追踪定位技术;计算机导航doi:10.3969/j.issn.1672-9676.2014.03.041计算机导航辅助骨科技术(CAOS)是使术者通过显示屏直观观察到所操作部位的解剖结构,通过可追踪的手术工具进行操作,提高了手术的质量和安全性[1]。
在计算机辅助骨科导航系统中,光学定位是目前手术导航系统中的主流定位方法,其作用就是实时测出手术器械的空间位置和姿态[2]。
手术室护理人员进行手术配合时除充分做好常规准备外,还应熟练掌握导航追踪定位技术,根据术中具体情况随时调整导航系统追踪定位状态,保证追踪定位的准确性,保证手术的顺利进行。
1临床资料我院手术室于2011年6月~2013年5月共30例在计算机导航辅助下行骨科手术,其中男6例,女24例。
年龄60岁以下13例,61~80岁13例,80岁以上4例。
全髋关节置换术2例,人工股骨头置换术1例,全膝表面置换术1例,股骨颈闭合复位空心钉内固定术4例,腰椎椎弓根钉内固定术10例,股骨粗隆闭合复位内固定术9例,肱骨近端切开复位内固定术2例,其他手术1例。
2操作方法2.1连接设备(1)把设备连接到计算机辅助导航系统,连接状态会自动显示,绿色实线表示确认已连接,桔色虚线表示连接未得到确认。
骨科手术导航系统在椎弓根螺钉固定术中的应用
龙源期刊网
骨科手术导航系统在椎弓根螺钉固定术中的应用
作者:毋强华
来源:《中外医疗》2013年第19期
目前,随着计算机技术及精密机械自动控制技术的日趋成熟,使得医学影像设备质量不断提高,在医学图像处理、三维可视、空间三维定位导航、临床手术等方面取得了更为广泛的应用。
目前,由定量诊断、手术模拟及预测、立体定向导航等组成的计算机辅助外科手术系统已经成为生物工程与临床医学研究的重点课题。
骨科手术导航系统是计算机辅助外科手术系统的一个重要分支,它可以在不改变临床医师传统手术习惯的基础上,结合现代医学影像技术,立体定位技术、可视化技术等为骨科手术提供更全面的信息。
计算机辅助导航技术在骨科中应用

多模态融合:将多种模态的医学影像和数据进行融合,提高手术导航系统的综合性 能。
计算机辅助导航技 术在骨科手术中的 实践案例
手术目的:矫正脊柱畸形,恢复脊柱功能 手术方法:采用计算机辅助导航技术进行精确定位和操作 手术效果:提高了手术成功率,减少了手术风险和并发症 案例分析:具体分析一例脊柱外科手术中计算机辅助导航技术的应用和效果
跨学科交流可以促进不同领域的知 识共享,提高技术应用的广度和深 度
添加标题
添加标题
添加标题
添加标题
跨学科合作可以促进不同领域的专 家共同解决问题,提高技术水平
跨学科合作与交流可以提高技术研 发的效率和质量,推动技术进步
计算机辅助导航技 术在骨科中的前景 展望
应用领域拓展:从骨科拓展到 其他医学领域,如神经外科、 心血管外科等
成本问题:计算 机辅助导航设备 价格昂贵,可能 影响其在骨科领 域的普及
操作难度:计算 机辅助导航技术 操作复杂,需要 专业人员进行操 作
数据安全:计算 机辅助导航技术 涉及患者隐私和 数据安全,需要 采取有效措施保 障数据安全
加强技术研发,提 高导航精度悉 度
效率。
原理:通过实时 获取患者骨骼数 据,结合手术计 划,生成三维手 术导航图,辅助 医生进行手术操
作。
技术特点:高 精度、实时性、 交互性、可视
化。
应用领域:骨 科、神经外科、 心血管外科等。
1980年代:计算机 辅助导航技术开始 应用于骨科手术
1990年代:三维重 建技术在骨科手术 中广泛应用
2000年代:机器人 辅助手术系统在骨 科手术中逐渐普及
2010年代:人工智 能技术在骨科手术 中开始得到应用
计算机辅助导航系统及其骨科应用
见 临床 应 用报 道 。它 允许 医 生在 机器 人 控 制 的安 全 且 可在 特定 位 置 夹住 或放 置 手术 器 械 ;缺 点 是术 中
范 围 内随 意移动 手 术 工具 ,但 如果 手 术超 越 此安 全 较 为笨 拙 ,施 加在 机 械手 上 的压 力 可使 数 据 发生 变
开 重要 的解 剖结 构 ,确 保 手术 的安 全 。 还可 以模 拟 导 航系 统 。该 系 统具 有 定位 精度 高 、处理 灵 活 的优
手术 器 械 的前进 和 后退 ,存储 手术 路 线 ,测 量植 入 点 ,但 其 红 外线 接 收装 置容 易 受术 中手 的遮 挡及 周 物 的角度 、长度及 直径 ,便 于 医生客 观地 进行 手术 。 围光 线或 金属 物 体镜 面 反射 的影 响 。 利用 C ANS可减少 术 中 X 线机 的使 用 ,进 而减 少患 1 2 2 磁 ( .. 电磁 场 )定 位 :利 用每 个 电磁产 生 的线 者及 手术 室 工作 人员 的 X线 摄人 ,维护 其健 康 。 圈 定义一 个空 间方 向 ,3 个线 圈确 定三个 空 间方 向 , 然后 再 根 据 已知 的相 对 位置 关 系 即可确 定 目标 的空 1 C N 的分 类及 其原 理 特点 AS 间 位置 。 电磁 定位 系统 定 位精 度 较高 , 属于 非接 触
研 、用 究应 。
1 2 按照 导航 信号 分 四类 .
幸
外 关节外 计算 科、 科 机
.. 红外 线 ) :该 导航 系统 是 目前 导航 辅 助骨科导 航技术 利 用计 算机 计算 出信号 传 输和 接 收 发射器 位 置 点 的 1 2 1光学 定 位 ( 数据 ,得 出所需 的各 种 曲线和 角度 ,使 无形 、虚 拟 系 统 中 的主 流定 位 方法 。 以 CCD 摄像 机 作 为传 感 的人 体参 数 转变 成直 接 的动 画 图像 。同 时可 使 手术 器 ,利 用 安装 在 手术 器 械上 的红 外发光 二 极 管 发出 器械 的位置 在术 中影像 上 实 时更新 显 示 ,让 医 生 随 的 红 外线 的 空 间位置 ,判 断 出手术 器 械 的位 置和 姿 时 了解 手术器 械 的位置 与 患者 解剖 结 构 的关 系 ,避 态 , 指导 医生 完成 手术 操作 , 德 国蛇牌 Orh plt 如 to i o
骨科手术导航系统的设计与应用

骨科手术导航系统的设计与应用随着医疗技术的发展,骨科手术的稳定性和精度越来越高,但作为医生却难免会遇到一些比较特殊的病例,有时需要直接对病人进行手术。
这时,手术导航系统的应用就显得尤为重要,可以有效提高医生的操作精度和手术成功率。
一、骨科手术导航系统的基本原理骨科手术导航系统是一种通过计算机技术和医学图像处理技术实现的技术手段,可以帮助医生在手术中更加准确地定位和操作手术部位。
一般而言,手术导航系统由以下三个部分组成:1. 感知装置:感知装置主要是指一些传感器和定位器,如声音、视频、磁场等,可以实时地判断病人当前部位位置和姿势。
2. 导航软件:导航软件是整个导航系统的核心部分,通过对先前拍摄的病人影像进行三维空间重建,可以实现对病人各个部位的定位和跟踪。
医生在手术操作时,系统会自动显示手术器械和病人内部结构的位置信息,方便医生对手术部位进行判断。
3. 显示器:显示器是将实时获取到的病人影像和手术器械的位置信息合并并直观地呈现给医生的装置,可以使医生更加直观地了解手术部位的情况,提高手术精度。
基于上述原理,骨科手术导航系统被广泛应用于医疗机构,特别是在复杂的骨科手术中,可以使医生在保证手术精度的同时,减少手术时间和术后并发症。
二、骨科手术导航系统的设计与构成骨科手术导航系统的设计,需要深入了解医学和计算机技术,掌握医学图像处理技术和3D建模技术,并在初始化设计阶段,围绕着病人影像处理、器械跟踪、手术指令和影像呈现等重要环节,确定完整的系统框架和技术实现路线。
在设计阶段,需要考虑到医疗设备的多样性和操作体验效果,同时特别考量设备的通用性,保证医疗生态的稳定性和持续性。
另外,还需要注意到设备的制造成本与开放性,并围绕着现有的医疗设备设计开放接口,方便不同设备间的数据共享。
三、骨科手术导航系统的应用场景骨科手术导航系统是一个综合性医疗设备,应用广泛。
特别适合在一些高难度的骨科手术中使用,例如骨折复位术中,骨臂修复手术中,脊椎手术中等。
计算机导航系统在腰椎及股骨颈骨折内固定手术中的应用
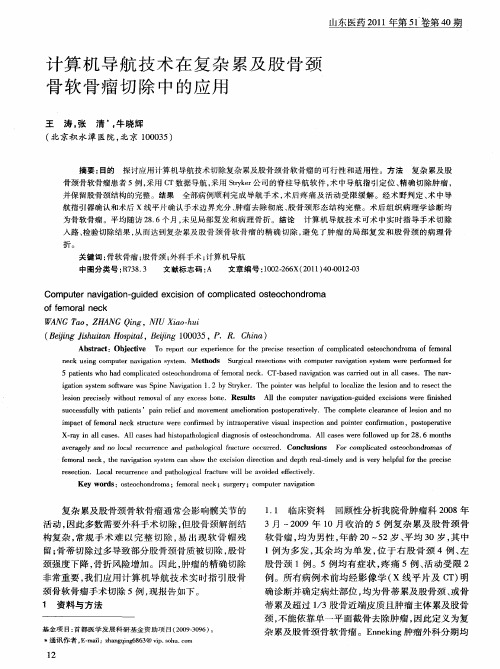
16例均获得 随访 , 0 随访 时间为 6 1 月 , 均 1 — 3个 平 0个
月。 骨折愈合判定标准 :优 : 行走正常 , 复原功能 , 恢 无疼痛 ,
图 2 腰椎骨折计算机导航术后应用 C臂拍片
本组 7 9例 ; 行走轻度跛行 , 良: 功能基本 正常 , 活动多时有疼
维普资讯
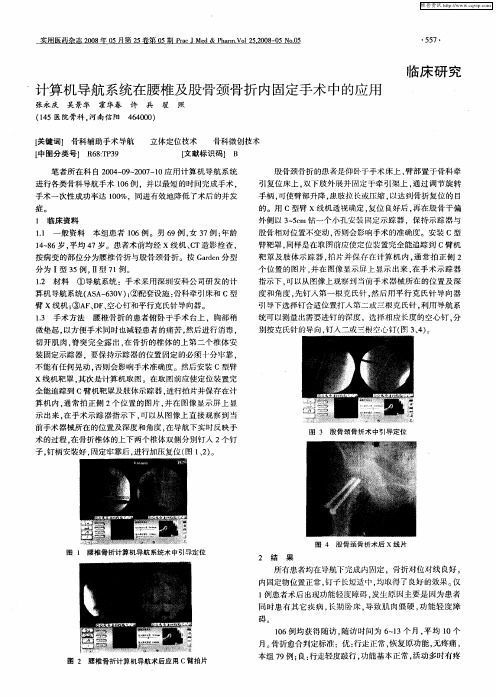
进行各类骨科导航手术 16例 .并以最短的时问完成 手术 , 0
手术一次性成功率达 10 0 %,同进有效地 降低 了术后的并发 症。
1 临 床 资 料
1 一般资料 . 1
本组患者 16例 。男 6 0 9例 , 3 ; 女 7例 年龄
股 骨 相 对 位 置不 变动 , 否则 会 影 响 手 术 的 准 确 度 。 安 装 C型
张永庆 吴景 华 霍华春 许 兵 翟 照 (4 15医 院骨 科 , 南信 阳 4 4 0 ) 河 6 00
【 关键词】 骨科辅助手术导航
【 图分 类 号 】 R 8T 3 中 6 :P 9
立 体 定 位 技术
骨 科 微 创 技术
【 文献 标 识 码】 B
笔 者 所 在 科 自 20 — 9 2 0 — 0应 用 计 算 机 导 航 系统 040 ~07 1
1~ 6岁 , 均 4 48 平 7岁 。患 者 术 前均 经 x线 机 、 T造 影 检 查 , C
臂靶罩 , 同样足在取图前应使定位装置完全能追踪 到 C臂机 靶罩 及肢体示踪器 , 片并保存在计算 机 内, 常拍正 侧 2 拍 通 个位 置的图片 . 在图像 示屏上 显示 出来 , 手术示踪 器 并 在 指示下 . 以从图像上 观察 到当前手术器械所在 的位置及 深 可
・
5 8・ 5
智能导航系统在手术中的应用AI助力精准定位

智能导航系统在手术中的应用AI助力精准定位智能导航系统在手术中的应用:AI助力精准定位导言:随着人工智能技术的不断发展,智能导航系统在医疗领域的应用越来越广泛。
特别是在手术过程中,智能导航系统带来了许多便利和效益。
本文将探讨智能导航系统在手术中的应用,以及AI技术如何助力精准定位。
1. 智能导航系统的基本原理智能导航系统是基于人工智能技术开发的一种创新医疗设备,它利用高精度的传感器和智能算法,能够实时获取患者的解剖结构信息,并将其与医生的手术操作相结合,实现精准定位和导航。
2. 智能导航系统在手术中的应用2.1 神经外科手术中的应用神经外科手术是一种高风险且具有复杂性的手术,需要医生对患者的神经解剖结构有着精准的了解。
智能导航系统通过实时扫描患者的大脑结构,能够提供精确的数据,帮助医生在手术中定位和导航,最大限度地减少手术风险。
2.2 骨科手术中的应用骨科手术需要医生准确地找到患者的骨骼结构,然后进行手术操作。
传统手术方式下,医生需要依靠自己的经验和观察来进行定位,容易受到人为因素的影响。
而智能导航系统可以根据预先扫描的患者骨骼结构图像,为医生提供准确的位置信息,使手术操作更加精准。
2.3 心脏手术中的应用心脏手术是一种高风险的手术,对医生的要求非常高。
智能导航系统可以通过监测患者的心脏结构和功能,为医生提供实时的数据反馈和引导,帮助医生准确定位手术部位,并提供最佳的手术路径,大大提高手术的安全性和成功率。
3. AI技术助力智能导航系统人工智能技术是智能导航系统的核心驱动力。
通过深度学习算法和大数据分析,AI技术可以比医生更快速、精准地识别和定位患者解剖结构,从而为手术过程提供更为高效和准确的导航。
此外,AI技术还可以根据手术历史数据和文献资料,为医生提供最新的临床指导和决策支持,进一步提高手术的精确性和安全性。
4. 智能导航系统的优势和挑战4.1 优势智能导航系统能够提供实时的准确导航和定位信息,帮助医生更加精确地进行手术操作,减少手术风险,提高手术成功率。
骨科手术导航中2D--3D医学图像配准的应用研究

摘
要
在外科临床手术中,骨科手术是一类风险较大的常见手术。传统地,临床 医生在手术中主要凭借以往临床经验或依赖患者术前MRI、CT影像或二维X线 透视片评估病人的解剖信息。此时,医生需要通过该影像于大脑中构建具有三 维形态的人体器官和手术过程,尽管这种方式能对临床手术起到一定的辅助作 用,但手术的成功率很大程度上依赖于外科医生的临床经验,整个手术操作过 程缺乏客观科学的影像依据。如果采用临床X线图像进行术中实时引导,临床 医生和患者都须接受较大剂量的辐射,他们的身体将被严重伤害。因此,骨外 科手术导航技术应运而生,它是临床医学影像技术、电子和计算机技术共同发 展的结果。手术过程中,它以MRI、CT等影像数据为基础,将病人术前医学影 像数据和手术床上病人的解剖结构准确对应,定位追踪器将手术器械的相对位 置在病人解剖影像上以虚拟探针的形式实时更新显示,使骨外科医生实时掌控 手术器械相对病人解剖结构的精确位置,从而实现骨科手术的引导。骨科手术 导航在临床应用中可以提高手术的精确度和成功率,同时也减少了患者的创伤, 即成为目前计算机集成外科辅助治疗领域的研究热点。 骨科手术导航技术中,医学图像配准为其中重要的一环。医学图像配准是 指将来自不同形式或不同时间的探测器的医学图像(如MRI,CT,X线图像等),利 用计算机技术实现对于一幅医学图像寻求一种或者一系列的空间变换,使它与
sinIatioIl,
cl证cians
are
cons仇lct
a
mree-diIllensioIIal shape of human o唱a11s and
rate
su玛ical procedures i11也e braill,t:}le
Success
骨科手术中的导航技术应用与操作指南

骨科手术中的导航技术应用与操作指南导航技术的应用在骨科手术中发挥了重要作用,它可以帮助医生准确地定位和导航手术切口、骨折修复、关节置换等过程中的关键步骤。
本文将介绍导航技术在骨科手术中的应用以及操作指南。
导航技术是一种借助计算机辅助设备的技术,在手术过程中通过实时的图像导航为医生提供准确的位置指引和解剖结构信息。
它可以用于导航手术切口位置、确定骨折修复位置、辅助关节置换手术等,有助于提高手术的精确性和安全性。
在骨科手术中,导航技术的应用主要包括以下几个方面:1. 骨切口导航:传统的手术切口定位依赖于医生的经验和手动测量,存在一定的误差。
而借助导航技术的帮助,医生可以通过预先标记的参考点或特定软件来确定切口位置,有效降低了手术切口的误差。
2. 骨折修复导航:导航技术能够提供高精度的三维解剖定位信息,为医生在复杂的骨折修复手术中提供准确的导航指引。
通过导航系统的实时影像显示,医生能够直观地了解骨折的位置、角度和关系,从而更好地规划手术方案,减少手术时间和创伤。
3. 关节置换导航:在关节置换手术中,导航技术可以提供关节的解剖信息以及手术切口和假体定位等指导。
通过导航系统的引导,医生可以在手术过程中实时调整手术方案,确保假体与周围组织的高度适配和稳定性。
导航技术在骨科手术中的操作指南如下:1. 前期准备:在手术前,医生应根据患者的病情和手术需求选择适合的导航系统,并对系统进行充分的了解和熟悉。
同时,需要对患者进行影像学检查,获取患者的三维图像数据,以供导航系统使用。
2. 导航系统设置:在手术现场,医生需要将导航系统与手术器械和影像设备进行连接,并进行系统校准。
校准过程中,医生需要准确标定参考点,以确保导航系统的准确性。
3. 手术过程中的导航操作:手术过程中,医生通过导航系统的实时影像显示和定位指引,可确定手术切口位置、骨折修复位置等关键步骤。
医生可以通过系统提供的功能调整影像的方向、角度和放大倍数,更好地观察和导航手术区域。
骨科手术导航技术的现状与未来

个性化手术导航的发展
1 2 3
个性化导航模板
根据患者的个体差异和手术需求,制定个性化的 导航模板,提高手术的针对性和成功率。
实时动态调整
在手术过程中,根据患者的实时生理数据和手术 进展,动态调整导航方案,确保手术的安全性和 效果。
术后评估与反馈
通过术后评估和反馈机制,不断完善和优化手术 导航技术,提高技术的准确性和可靠性。
技术应用经验总结
提高了手术的精准度和安全性
01
骨科手术导航技术能够实时跟踪手术器械的位置和方向,避免
了对周围组织的损伤,提高了手术的精准度和安全性。
提高了手术效率
02
由于骨科手术导航技术能够精确地定位和操作,缩短了手术时
间,提高了手术效率。
需要专业培训和技术支持
03
骨科手术导航技术需要医生具备专业的技能和知识,同时需要
创伤外科手术导航
创伤外科手术导航技术主要用于骨折的复位固定、关节脱 位的复位等手术。通过导航系统,医生可以精确地定位骨 折或脱位部位,提高手术的准确性和安全性。
创伤外科手术导航系统通常采用X线透视或CT图像引导技 术,能够实时跟踪手术器械的位置和方向,并将数据反馈 到手术导航系统中,以便医生做出准确的判断和操作。
技术发展历程
初始阶段
20世纪90年代初,骨科手术导航 技术开始起步,主要用于骨折复 位等简单手术。
发展阶段
随着技术的不断进步和应用领域 的拓展,骨科手术导航技术在脊 柱、关节等复杂手术中得到广泛 应用。
成熟阶段
目前,骨科手术导航技术已经进 入成熟阶段,在临床实践中得到 了广泛应用和认可。
02
骨科手术导航技术的应用现状
THANKS
感谢观看
计算机导航全膝关节置换术在创伤后股骨干严重畸形患者中的应用

( 华 扶他 林 杯 征文 ) 诺
计算机导航 全膝关节置换术在创伤后股骨干 严 重 畸形 患者 中 的应 用
王诗 军 赵 宇驰 张树 栋 马卫 华 王 雏光 赵 中原 刘 克贵 孔 刚
【 摘要 】 目的
中 的应 用 。 方 法
介绍计算机导航辅 助全膝关节置换术 ( K 在伴 有关节外 股骨严重 畸形患者 T A)
中华 关 节外 科杂 志 ( 电子 版 )o 1 l 2 l 年 2月第 5卷第 6期
C i J o t ug Eet n dtn ,ee br 0 1 V 15 N . hn i r( lcoi E io )D cm e 1 , o. , o6 Jn S r c i 2
.2 . 5
【 关键词 】 外科手术 , 机辅助 ; 关节成 形术 , , ; 畸形 计算 置换 膝
Na i a e 0 a n e a t r p a t n p t n t e e e e t a a t u a e r ld f r t W v g t d t t lk e r h o l sy i a e t wih s v r x r ・ r i l r f mo a e o miy i s c ANG S i n,ZH u c i ZH NG S u 如 , h AO Y —h , A h 一 MA We— u i a,WA i u n ZH o g y a ,L U K — h NG We— a g, AO Zh n — u n I e g
【 bt c】 0 jcv T e e u xe ec i c pt — st t neahol t A s at r bete or i o eprne n o u r ss dta ke r r a y i vw r i m e a ie o l t ps
计算机导航系统在椎弓根螺钉固定中的应用

计算机技术、 虚拟现实技术、 医学影像技术、 图像处理技 术及机器人外科技术与外科手术技术相结合, 产生了计算机 辅助外科技术。 计算机辅助外科技术是基于计算机对大量数
据信息的高速处理及控制能力, 通过虚拟手术环境为外科医
解剖, 制定手术方案, 并确定每个椎弓根螺钉的理想植入轨 迹、 长度和直径( 见图 1 ) ~2 。随后可用携带示踪器的椎弓根
3 讨 论
大大降低了手术的失误率 ;) c导航仪提供了可以从存储于计 算机上的三维影像资料上模拟测量钉道长度、 角度及椎弓根
直径的功能, 便于选择最佳长度与直径的椎弓根钉。使椎弓
自 15 年 B nhr 99 oce 采用长螺钉经椎板、 椎弓根达椎体 固定腰骶关节取得成功以来, 经椎弓根脊柱内固定技术已在 世界范围内广泛应用。 椎弓根螺钉可以固定到脊柱的前中后 三柱, 固定了椎问盘和两侧关节突关节三个活动部分 , 通过 短节段内固定装置上的椎 弓根钉与纵向连接杆( 之问的 板) 撑开、 加压作用 , 提供三维矫正和坚强的内固定, 恢复脊柱的
图 1 三维导航影像 系统 采集的术区 图像
置于术者对面, 术前将计算机导航三维影像系统与 c型臂 x 线机连接, 并调至工作状态, 手术床与体位垫均能透过 x线。
手术采用传统后正中入路显露椎体后路结构, 将动态参考架 固定于需椎弓根螺钉固定节段的上一椎体棘突根部, 随后采
用装有校准靶的c型臂, 动等中心旋转 10收集手术区域 自 9。 三维影像资料( 采集 26 5 帧二维影像图片, 经计算机处理重 建三维影像图像, mn 采集完毕后将影像资料传输至计算 2 i) 机导航三维影像系统工作站 。 导航检测仪上显示手术区域的 模拟三维影像, 医生在此基础上 , 可以详细研究手术部位的
计算机导航技术在复杂累及股骨颈骨软骨瘤切除中的应用
n c sn o e k u i g c mpue v g to y t m. M e ho S r c lrs cinswih c mpu e viain y t m r rom e o trna i ain s se t ds u gia e e t o t o trna g t o s se wee pef r d fr
o e ff mo a e k rI c n
W N a , H NG Qn , I ioh i A G T o Z A ig N UX a —u
( ei i utnH si l B in 0 0 5 尸 .C i ) B in Js i o t , ei 10 3 , .R hn jg h a pa jg a
5 p t n sw oh dc mp i ae se c o d o f e r l e k ai t h a o l t d o to h n rmao moa c .C — a e a iai n w sc r e u n alc s s h a — e c f n T b s d n vg t a a r d o ti l a e .T e n y o i
山东 医药 2 1 0 1年第 5 卷第 4 l 0
计 算 机 导 航 技 术 在 复 杂 累 及 股 骨 颈 骨 软 骨瘤 切 除 中 的应 用
王 涛, 张 清 , 牛晓辉 ( 北京积 水潭 医院 , 京 10 3 ) 北 0 0 5
数字骨科学:计算机辅助导航技术与长骨骨折
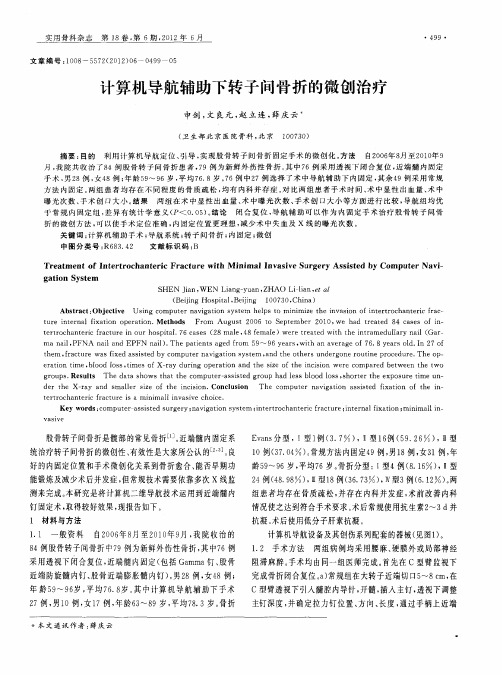
导针均一次成功置入, 标本截面测量导针 实际位置与规
划位 置相 比误 差范围在1 mm左右:对平行度参数的统 计 学分析结果显示正 、侧位X 片上机器人辅 助操作 的 线 螺钉平行度均优于徒 手操作( < 00 ) 户 .5,稳 定性也优于
导航技术在四肢 长骨骨折的主要应 用包括 : 内钉 髓 远端 交锁 固定 、 股骨颈骨折 空心钉 固定、 张力钢丝 固定, 部 分关节 内和关 节周 围骨折 的 固定 ,经转 子周 围骨折 D S固定和钢板 固定等 H
1 计 算 机 辅 助髓 内钉 远 端 交 锁 固 定
随着 医用机器人技术的发展 , 结合计算机辅助骨科
数字骨科学:计算机辅助导航技术与长骨骨折
《 国组 织工程 研究 与临床 康复 杂志 社学 术部 ,辽宁 省沈 阳市 10 0 中 104
本文导语:
O 计算机导航系统或影像学导航手术 已成 为 了 创 伤 骨 科 治 疗 技 术 的 主 体 ,这 些 辅 助设 备给 外 科医 生提 供准 确 的解 剖部 位、 手术置入物及相关器械 的实时信息 。
0 髓 内钉远端交锁方法有机械瞄准和透视 瞄准 机械瞄准操作繁琐 ,有时会 发生 远端瞄准失败 ,而透视瞄准 需要术 中多
步 完成 ,简化 了手术操作 0 三维 模式 提供 虚拟 的 内植物 和器 械图 像 ,通过建立各种常用内植物( 包括各种
术机器人 :骨折:固定 d i 03 6  ̄i n1 7 -2 52 1 .80 1 o: .9 9 .s .6 38 2 .0 04 .0 1 s
0 导针在股骨颈 内的位置正确与否决定手
术 的 成 败 导 航 技 术 的 出 现 ,减 少 了透 视 频 率 , 使 得 透 视 、打 入 导 针 和 测 探 一
计算机导航辅助下转子间骨折的微创治疗
( ej g Ho p tIB in 1 0 3 Chn ) B in s ia , ej g i i 0 7 0, ia Ab tat Ob etv Usn o u e a iain s se h lst nmiet e iv so fitrr c a trcfa— sr c : jcie ig c mp trn vg t y tm ep O mii z h n a in o n e to h n e i r c o
t e ,r c ur a i e ss e om p e viaton s s e , n heot r nde go ou ie pr e h m f a t e w sfx d as it d by c ut rna g i y t m a d t he s u r ner tn oc dur Theop— e. e a i i e, l od l s, i e r y d i r ton tm b o os tm s ofX— a urng ope a i n a he sz ft ncso w e e c p e t e t e t r to nd t ie o he i iin r om ar d be we n h WO
摘要: 目的
利 用 计 算 机 导 航 定 位 、 导 , 现 股 骨 转 子 间骨 折 固定 手 术 的微 创 化 。 法 自20 年 8 至 2 1 年 9 引 实 方 06 月 00
月 , 院 共 收 治 了8 我 4例 股 骨 转 子 间 骨 折 患 者 ,9例 为新 鲜 外 伤性 骨折 。 中7 7 其 6例 采 用 透 视 下 闭 合 复 位 , 端 髓 内 固定 近 手术, 2 男 8例 , 4 女 8例 8岁 。 6例 中 2 7 7例 选 择 了术 中导 航 辅 助 下 内 固定 , 其余 4 9例 采 用 常 规 方 法 内 固 定 。 组 患者 均存 在 不 同程 度 的 骨质 疏 松 , 有 内科 并 存 症 。 比两 组 患 者 手 术 时 间 、 中显 性 出血 量 、 中 两 均 对 术 术 曝 光次 数 、 术 创 口 大小 。 果 两组 在 术 中 显 性 出血 量 、 中曝 光 次 数 、 术 创 口大 小 等 方 面 进 行 比较 , 手 结 术 手 导航 组 均 优 于 常 规 内 固定 组 , 异 有 统 计 学 意 义 ( 差 P< O 0 ) 结 论 闭 合 复 位 , 航 辅 助 可 以作 为 内 固定 手 术 治 疗 股 骨 转 子 间 骨 .5。 导 折 的 微 创 方 法 , 以使 手 术 定 位 准 确 , 固定 位 置 更 理 想 , 少 术 中失 血 及 x 线 的曝 光 次 数 。 可 内 减 关键词 : 算机辅助手术 ; 计 导航 系 统 ; 子 间骨 折 ; 固 定 ; 创 转 内 微
计算机辅助导航系统在骨科手术中的临床应用

u ei i i S.n ciia o t o a dc, s e il h s et fs ie s ia c r ,on ug r n r u t s ci C I l c l rh p e is ep c l i t ea p cso pn ,pn l od j its r ey a d ta mai n n n ay n c
s ge y, N ur r CA S ha ly d a m p t ntr l W ih d v lp n fs inc s CA sp a e n i ora oe. t e eo me to ce e , N S i u et i c d ra ss r o fnd mu h wi e p— pl a insi l c . i t c o n ci s ni
[ yw rsC mptr sidoeai ; aiai yt O toadc Ke od] o ue—ase prtn N v t nss m; rhpei t o g o e s
计算 机辅助 骨 科手 术 ( mp tr sie r o o C ue s tdot — a s h pdc rey C S 即 利 用 各 种 影 像 设 备 如 C e i s g r, AO ) su T、 MRIP T、 S US等 结 合 导 航 系 统 , 人 体 骨骼 、 E D A、 对 解剖结 构及手 术 器械 进 行显 示 和 定 位 , 通过 计 算机 制订手 术计 划 , 术 中 进 行 操 作 干 预 的 一项 技 术 。 在 计 算 机导 航 系 统 ( mp tra i e a i t n ss o C ue s s dn vg i y— t ao tm A ) 空 间立 体 导 航 技术 、 算 机 图像 处 理 e C NS 将 计 及 可视化 技术与 临 床结 合 起 来 , 用计 算 机计 算 出 利 信号 传输和 接收 发 射 器位 置 点 的数 据 , 出所需 的 得 各 种 曲线 和角度 , 使无形 、 虚拟 的人体参 数转变成 直 接 的动画 图像。 同时可 使手术 器械 的位置 在手术 影 像上 实时显示 , 医生 可 以随 时 了解 器械 位 置与 解 剖 结构 的关 系, 确保 手 术 的安 全 ; 最 大 的优 势是 : 其 简 化了手 术操作 , 短 了手 术 时间 , 少 了手 术 创伤 , 缩 减
手术室护理人员使用计算机导航追踪定位技术配合骨科手术的方法
术, 手术 室护理 人员采用导航追踪定位 , 即导航设备的安装连接 、 导航定 位的追踪 、 出现问题的处理及 纠正等方法进行 配合 。结果 : 手术过程 顺 利, 3 O例骨科患者成功实施 计算机导航辅助下 的骨科手术 。结论 : 护理人员通过计算机导航追踪定位技术 的学 习与培训 , 不断开阔视野 , 更新 观 念, 提高 自 身素质 , 能积极应对高难度及高新技 术的开展 。 关键词 护理人员 ; 追踪定位技术 ; 计算 机导航 d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2- 9 6 7 6 . 2 0 1 4 . 0 3 . 0 4 1
顺利进行 。 1 临床 资料
方法 , 其作 用就是 实 时测 出手术 器械 的 空间 位置 和姿态 。 手术室护理人员进行手术配合 时除充 分做 好常规准备外 , 还
作者单位 : 2 1 4 0 0 1 无锡市 南京中医药大学附属无 锡市中医医院 金永 红 : 女, 本科 , 副主任护师
计算机导航辅 助骨科 技术 ( C A O S ) 是 使术者 通过显 示屏
直观观察 到所操作部位 的解剖 结构 , 通过 可追踪 的手术 工具 进行操作 , 提高 了手术 的质 量和安 全性 。在计算 机辅 助骨
科导航系统 中, 光学定位是 目前手 术导航 系统 中的主流定 位
应熟练掌握导航追踪定 位技术 , 根据 术 中具 体情况 随时调整 导航系统追踪定位状态 , 保证 追踪 定位的准确性 , 保证手术 的
推广使用 。
参 考 文 献
0 . 1 5 ) ℃。术后无 1例患 者 出现寒 战 、 苏 醒延迟 等 现象 , 有4
例患 者出现轻微躁动 。 4 讨 论
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Basic principle
基本设备:
• 不同的导航系统有不同的设备,但其中最基本的
设备是一致的。大概有以下三种分类: (1)SO(surgical object):手术操作实体,在骨 科领域,主要是骨骼及相关联的组织结构。 (2)VO(virtual object)成像设备。现在常用的 CT,X线,MRI ,PET,DSA 等影象设备,可以 实时准确地提供图象及数据。 (3)NAV(navigator):导航仪。即在SO 和VO 之间的连接装置。获取操作器械在人体的定位和 方向。
easy setup, mobile, only 80 x 80 cm each
Surgical instruments are tracked by a camera
LED Camera
Infrared
Shield
Best tracking technology
• High precision
状校准是必需的。即在操作器械上安装跟踪器, 是提高图象配准精度及定位精度的第一步。 2.配准(registration):其目的是在VO和术前图象 的基础上对手术器械定位,提供相对应的定位显 象。 3.参照(reference):动态参照系统(dynamic reference bases,DRB)可以弥补由于导航仪和骨 骼位置的移动带来的误差。
Digitise anatomical structures
Place and test virtual ligament
• Prediction of Impingement
• Prediction of Anisometry
• Incorporate biomechanics
4.关节置换
• 包括髋关节置换(TKA)和膝关节置换(THA)。
Patient Image
二.工作模式
•
医生通过术前或术中x线/CT/MRI对人 体手术部位进行显示,定位,然后规划模拟, 术中手持装有跟踪器的操作器械对患者实施操 作,手术工具的空间立体定位及瞄准过程均在 跟踪器的实时控制之下,跟踪器能够精确地给 出术中解剖部位与多模图像之间的位置关系, 经过相应坐标转换(平移、旋转等)的配准过 程.控制手术器械到达要求的部位,从而实施 相应的手术操作。
Advanced pre-op planning
Guidance
Current position
Target position
Realtime Trajectory
Future penetrations
Current position
4 3 2 1
R
L
2.创伤骨科
•
随着微创的要求变高和X线的局限性,计算机导航在 在创伤骨科的应用将更加广泛,主要集中在骨盆骨折(20) 和长骨骨折。(1)骨盆骨折有些位置比较深而且移位比 较小,X片不容易发现,而且手术入路比较困难,很难达 到坚强固定。用以CT依赖的导航则变的简单方便,将参 考架固定于病人骨折肢体表面,术前进行CT扫描,手术 模拟入路位置术中导航仪帮助引导,配准,经皮即可到达 理想部位,达到坚强准确固定骨折。(2)锁式髓钉的应 用。主要应用与远端锁钉的固定,关键有两步(21): 首先准确的控制锁钉入孔,在髓针进入髓腔以后,远端的 锁钉必须准确。其次术中钻孔需要跟踪实时显象(3) DHS的应用。首先复位用克氏针临时固定,然后将动态 参考系统固定在斯氏针上插入股骨近端。C臂照射,将图 象传到投射计算机工作站,通过设计轨迹和引导进行螺钉 置入。
计算机导航在骨科手术中的应用
一.基本概念
•
CAOS即利用各种影象设备如CT、MRI、 PET、DSA、US等结合导航系统,对人体骨骼解 剖结构及手术器械进行显示和定位,通过计算机 制订手术计划,在术中进行操作干预的一项技术。 最早应用于神经外科领域的立体定位,肿瘤切除 化疗等。其最大的优势是:简化了手术操作,缩 短了手术时间,减少了手术创伤,减弱了术中放 射线的照射,使骨科手术变的更安全、更准确、 更微创。
髋关节置换的应用比较早。最主要的问题是确定 假体的位置和轴线。计算机辅助骨科技术系统可 以在术前用CT或X线对关节进行扫描及三维重建, 设计假体的位置、大小,通过计算机计算出力学 轴线和截骨平面,模拟匹配,模拟关节活动。术 中通过导航系统指导医生在合适的位置安放假体。 Leenders的一项临床随机研究表明CAOS对于假 体安放位置要优于传统手术。减少了全髋置换中 由于位置不合适而造成的假体脱位。
Step 1: Placement of the Reference Base
Reference coordinate system is attached anywhere on patient.
Step 2: Shoot images
Image stored in the computer
Step 3: Navigate
Cup Planning
optimal implant optimal placement
Execution Phase
Execution Phase
5.肿瘤
• 如何能够精确的切除靶区肿瘤组织,进行化疗和
放疗,这是医学界的一大难题。计算机导航在此 方面优势明显。CAOS通过CT定位系统能够对高度 不规则肿瘤制订精确的三维立体显象,提供肿瘤 的实际形状,能够严格的区分肿瘤与周围的正常 组织。以达到准确切除和最佳照射角度和放射野 来避开重要组织器官,并使放射计划的剂量分布 更为精确合理。它不仅对放射治疗的计划设计和 照射质量的提高有明显作用,而且将显著提高存 某些肿瘤的控制率和病人生存率.
三.临床应用
• 1.脊柱外科: • 最早在实验室应用于椎弓根螺钉系统,由于设备技术
的限制,以前仅限于腰椎的应用,现已拓展到颈椎和胸椎。 最常用的导航是(1)依赖CT的导航。如椎弓根螺钉的置 入,术前通过CT对手术部位脊柱进行三维重建,制定手 术方案,然后在脊柱上确定3~6个术中可分辨的标记点。 术中通过带有动态参考系统的操作器械进行点对点匹配。 当二者完全匹配时再钻孔置入螺钉。由于CT良好的三维 图象,最常用于颈椎和胸椎上段。在计算机导航系统引导 下的颈椎离体实验中,C12经关节螺钉与经椎弓螺钉的使 用都是安全的,而且有很高的精确性(2)以依赖X 线的导 航:术中通过X线获得图象,然后通过计算机工作中心设 计引导下置入椎弓根螺钉。不需要术前模拟,而且术中图 象可以更新,但是无法得到良好的三维图象。所以更广泛 应用于腰椎和下胸椎,不过也有人开始应用于颈椎和上胸 椎。目前的脊柱外科的研究热点是如何进行经皮螺钉植入 和脊柱内窥镜技术。
Fragment motion
6 22 3
3.ACL 的重建
•
膝关节交叉韧带的重建关键在于股骨远端和 胫骨近端的两个移植交叉韧带骨孔位置的确定.通 过术前模拟来确定合适的钻孔点位置和方向。术 中进行图象配准来完成交叉韧带的重建。而且计 算机辅助还可以确定交叉韧带合适的张力; JameS等利用kneeNav-ACL系统进行了初步临 床研究,这个系统特点是术中导航和图像重叠技 术的融合,外科医生可以在术中清楚看到模拟的 膝关节,准确确定交叉韧带的位置,在监控下完 成钻孔,并通过模拟膝关节的运动确定交叉韧带 的张力。
(二).二维X线依赖的导航
•
C臂现在已经成为骨科手术的基本设备。其最 大的特点是实时迅速的显象,无须术前模拟。在 手术器械上和传感器上安装两套光发射二级管 (LEDS)通过显示屏来配准(11)。其配准过程 包括X线的建模和补偿由于C臂转动带来的图象变 形。示踪器安放在C臂上,可以计算控制功能参数, 最先被Hofsteterr使用(12)。通过C臂的转动 获得图象,是一对多的图象,相当于使用了多个C 臂,这是2维显象的一个优势。另一个优势是图象 可以更新,随时可以获得最新的图象,有利于复 杂骨折的复位。现在2维依赖的导航已经广泛应用 于关节置换、锁式髓针,DHS,十字韧带重建中。
Action
Image
OR Setup
三.基本类型
• (一)CT依赖的导航系统 • 最早应用于神经外科,目前在骨科应用比较广泛,最
早应用于脊柱椎弓根螺钉固定系统(6)。目前典型的系 统有DiGioia(7)等开发的Hipnav系统,Langlotz(8)等开发 的脊柱导航系统。术前将获得CT扫描图像,并将患者的模 拟仿真数据导人计算机中;术中,通过定位跟踪器获得手 术工具与解剖结构之间的空间位置关系,并与术前的CT图 像进行配准,在计算机中实时显示手术工具在仿真模型中 的位置关系,以指导医生实施手术操作。配准是其最关键 的技术,有过去的点匹配(9)和现在的面匹配(10)。 该导航最大的优点是可以获得良好的三维图象,有利于术 前计划和模拟。其缺点是,需要严格的配准和参照才能获 得更好的图象,而且无法实时显象,图象无法更新。,现 在已经广泛应用于全髋置换和全膝置换,DHS,锁式髓针, 十字韧带重建等。
Tool Set Spine
Tool Set Pelvis
• 4 chisels
• Pelvis
• Fragment • Calibration • Pointer • VK Simultaneous tracking of 9 tools!
Tool Set Hip Prosthetics
SurgiGATE® Components
Referencing
Automatic compensation of patient and camera motion. Reference coordinate system is attached anywhere on patient.
Matching
The transformation between the patient world and the CT image world is found
Applications