焊接机器人腕小臂结构设计说明书
第3章3.3 机器人腕部结构

2020/2/27
33
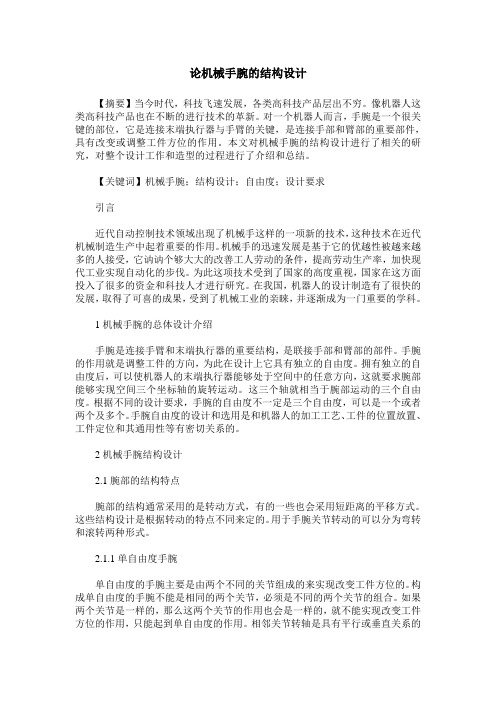
3.3 机器人腕部结构 3 三自由度手腕
2) 1齿.轮1 链工轮业传机动器三人自由的度基腕本部概念
俯仰 偏转
回转
2020/2/27
❖ 结构特点: ▪ 该机构为 由齿轮、 链轮传动 实现的偏 转、俯仰 和回转三 个自由度 运动的手 腕结构。
轴主动
行星运动
齿轮固 定不动
2020/2/27
31
3.3 机器人腕部结构
2020/2/27
2 二自由度手腕
俯仰 1.1 工业机器人的基本概念❖思考?
▪ 图中所示的情况,当 S轴不输入,只有B轴 输入时,腕部存在哪
些运动,为什么?
回转
齿轮传动回转和俯仰型腕部原理
32
3.3 机器人腕部结构
3 三自由度手腕
6
3.3 机器人腕部结构
2020/2/27
2 腕部的转动
滚转1:.能1 实工现业36机0°器无人障的碍基旋本转的概关念节运动,通常用R来标记。
弯转:转动角度一般小于360°。弯转通常用B来标记。
滚转可以实现腕部的旋转;弯转可以实现腕部的弯曲
7
3.3 机器人腕部结构
2020/2/27
3.3.2
1 单1.自1由工度业腕机部器人的基本概念
俯仰
偏转
回转
齿轮链轮传动三自由度手腕原理图
1—油缸;2—链轮;3、4—锥齿轮;5、6—花键轴T;7—传动轴S;8—腕架;9—行星架;10、11、22、24—圆
38 柱齿轮;12、13、14、15、16、17、18、20—锥齿轮;19—摆动轴;21、23—双联圆柱齿轮;25—传动轴B
论机械手腕的结构设计
论机械手腕的结构设计【摘要】当今时代,科技飞速发展,各类高科技产品层出不穷。
像机器人这类高科技产品也在不断的进行技术的革新。
对一个机器人而言,手腕是一个很关键的部位,它是连接末端执行器与手臂的关键,是连接手部和臂部的重要部件,具有改变或调整工件方位的作用。
本文对机械手腕的结构设计进行了相关的研究,对整个设计工作和造型的过程进行了介绍和总结。
【关键词】机械手腕;结构设计;自由度;设计要求引言近代自动控制技术领域出现了机械手这样的一项新的技术,这种技术在近代机械制造生产中起着重要的作用。
机械手的迅速发展是基于它的优越性被越来越多的人接受,它讷讷个够大大的改善工人劳动的条件,提高劳动生产率,加快现代工业实现自动化的步伐。
为此这项技术受到了国家的高度重视,国家在这方面投入了很多的资金和科技人才进行研究。
在我国,机器人的设计制造有了很快的发展,取得了可喜的成果,受到了机械工业的亲睐,并逐渐成为一门重要的学科。
1机械手腕的总体设计介绍手腕是连接手臂和末端执行器的重要结构,是联接手部和臂部的部件。
手腕的作用就是调整工件的方向,为此在设计上它具有独立的自由度。
拥有独立的自由度后,可以使机器人的末端执行器能够处于空间中的任意方向,这就要求腕部能够实现空间三个坐标轴的旋转运动。
这三个轴就相当于腕部运动的三个自由度。
根据不同的设计要求,手腕的自由度不一定是三个自由度,可以是一个或者两个及多个。
手腕自由度的设计和选用是和机器人的加工工艺、工件的位置放置、工件定位和其通用性等有密切关系的。
2机械手腕结构设计2.1腕部的结构特点腕部的结构通常采用的是转动方式,有的一些也会采用短距离的平移方式。
这些结构设计是根据转动的特点不同来定的。
用于手腕关节转动的可以分为弯转和滚转两种形式。
2.1.1单自由度手腕单自由度的手腕主要是由两个不同的关节组成的来实现改变工件方位的。
构成单自由度的手腕不能是相同的两个关节,必须是不同的两个关节的组合。
机器人手部设计

§4-5手部设计
一、概述 工业机器人的手部(Hand)也叫做末端操作器
(End-effector),它是装在工业机器人手腕上直 接抓握工件或执行作业的部件。人的手有两种 含义:第一种含义是医学上把包括上臂、手腕 在内的整体叫做手;第二种含义是把手掌和手 指部分叫做手。工业机器人的手部接近于第二 种含义。
3.按手指或吸盘数目分 机械手爪可分为:二指手爪、多指手瓜。 机械手爪按手指关节分:单关节手指手爪、多关节手指手爪。 吸盘式手爪按吸盘数目分:单吸盘式手爪、多吸盘式手爪。 图4-49所示为一种三指手爪的外形图,每个手指是独立驱动的。
这种三指手爪与二指手瓜相比可以抓取像立方体、圆柱体、球体 等不同形状的物体。图4-50所示为一种多关节柔性手指手爪,它 的每个手指具有若干个被动式关节(PassivejointS),每个关节不是 独立驱动。在拉紧夹紧钢丝绳后柔性手指环抱住物体,因此这种 柔性手指手爪对物体形状有一种适应性。但是,这种柔性手指并 不同于各个关节独立驱动的多关节手指。
工业机器人手部的特点:
(1)手部与手腕相连处可拆卸。手部与手腕有机械接 口,也可能有电、气、液接头,当工业机器人作业对 象不同时,可以方便地拆卸和更换手部。
(2)手都是工业机器人末端操作器。它可以像人手那 样具有手指,也可以是不具备手指的手;可以是类人 的手爪,也可以是进行专业作业的工具,比如装在机 器人手腕上的喷漆枪、焊接工具等。
焊接机械手臂设计

焊接机械手臂课程设计专业:机械设计与制造班级: 15级机械5班设计题目:焊接机械手臂设计指导教师:组别:学号:姓名:成绩:2016年5月目录一、技术参数 (2)二、设计要求 (2)三、设计过程 (4)四、设计结果 (5)五、设计总结 (7)六、心得体会 (9)一、技术参数:执行标准: GB8366-87 GB15579-1995额定输入电源: 380V 50Hz 3相额定输入电流: 5A最大负载:50Kg 额定负载持续率: 80%液压杆上升速度:20mm/s 最大上升高度:500mm摆臂最大摆角:150°摆速:10°/s旋转臂转速:30r/min二、设计要求:背景:在现代化的生产中,各个环节日益要求机械化、智能化。
特别是那些工作环境不好,工作条件恶劣的工种对机械化、智能化的要求更为强烈。
实现生产加工的机械化智能化不仅可以很好的保护工人们免受工作环境对身体的伤害,同时还可以提高生产效率和生产质量,实现量与质的双提高。
其中,焊接生产就特别需要这样的改进。
焊接生产过程存在焊接烟尘大,焊接保护气体和焊接过程中产生的气体对焊接工人的身体都会造成不同程度的伤害。
并且手工操作焊接对焊件结构存在局限性,导致焊接质量的不稳定性。
这些因素都反应出了焊接生产对机械化与智能化的需求,所以焊接机器人应时而生。
焊接机器人主要优点如下:1)稳定和提高焊接质量,保证其均匀性;2)提高劳动生产率,一天可24小时连续生产;3)改善工人劳动条件,可在有害环境下工作;4)降低对工人操作技术的要求;5)缩短产品改形换代的准备周期,减少相应的设备投资;6)可实现小批量产品的焊接自动化;7)能在空间站建设,核能设备维修,深水焊接等极限条件下完成人工难以进行的焊接作业;8)为焊接柔性生产线提供技术基础;焊接作为机械制造业中仅次与装备加工和切削加工的第三大加工作业,对其进行机器人柔性加工技术及其相关的控制器PC化,网络化和智能化的应用研究已成为焊接自动化发展的必然趋势。
机器人的机械臂结构

腕部的旋转:
电机M5→减速器R5→链轮副C5→锥齿轮副G5→旋转运动n5
腕部Байду номын сангаас仰:
电机M4→减速器R4→链轮副C4→俯仰运动n4
肘关节摆动:
电机M3→两级同步带传动B3、B3′→减速器R3→肘关节摆动 n3
肩关节的摆动:
电机M2→同步带传动B2→减速器R2→肩关节摆动n2
工字钢(GB706-88):
1、工字钢的型号与高度尺 寸h有关,如:10号工字钢 即指其高度尺寸为100mm。
2、其它参数如截面积、单 位长度的理论质量、截面静 力矩等可查相应的设计手册。
3、工字钢的长度按长度系 列购买。如:5~19m。
槽钢(GB707-88)
1、槽钢的型号与高度尺寸 h有关,如:10号槽钢即指 其高度尺为100mm。 2、其它参数如截面积、单 位长度的理论质量、截面 静力矩等可查相应的设计 手册。
2.手臂的回转运动机构
常见方式:
常见的有齿轮传动机构,链轮传动机构,活塞及连 杆传动机构等。
曲柄滑块机构:
假设滑块是主动件,当滑块沿一定的导轨移动时, 可以推动曲柄做摆动或圆周运动。
典型机构:
液压缸—连杆回转机构: 齿轮驱动回转机构:
平面四杆机构图例:
双曲柄机构
平面四杆机构
双摇杆机构
关节型机器人传动 系统图:
关节型机器人腕部旋转 局部图:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
关节型机器人腕部俯仰 局部图:
电机M4→减速器R4→链轮副 C4→俯仰运动n4
关节型机器人肘关节
局部图:
电机M3→两级同步带传动B3、 B3′→减速器R3→肘关节摆动n3
(完整版)焊接机器人总体设计

焊接机器人总体设计此次设计的目的是设计一台焊接机器人,本文主要对焊接机器人的机械结构系统部分进行研究、设计和分析。
1 焊接机器人总体设计的思路设计机器人大体上可分为两个阶段:(1)系统分析阶段1)根据焊接机器人系统索要实现的目标,明确所采用机器人的目的和任务;2)分析机器人所在系统的工作环境;3) 根据焊接机器人的工作要求和工作环境,基本上确定机器人的功能和方案。
例如机器人的自由度、信息的存储量、计算机功能、承受力矩、动作精度的要求、容许的运动范围、静动载荷以及对温度、震动等环境的适应性。
(2)技术设计阶段1)根据系统的要求来确定机器人的自由度和允许的空间工作范围,选择机器人的坐标形式和工作方式;2)拟订机器人的运动路线和空间作业图;3)确定驱动系统的类型;4)选择各部件的具体结构以及尺寸,进行机器人总装图的设计与装配;5)绘制机器人的零件图,并确定尺寸。
2 焊接机器人自由度和坐标系的选择机器人的运动自由度是指各机器人系统运动部件在三维空间就是固定坐标系所具有的独立运动数,对于每一个构件来讲,它有几个运动坐标就说明其有几个自由度。
各运动部件和机构自由度的总和就是机器人的自由度数。
机器人的手部要像人手一样灵活的完成各种动作是比较困难的,因为人的手是由手指、掌、腕、臂等19个关节组成,共有27个自由度。
而生产实践过程中没有必要需要机器人的手有这么多的自由度一般为3-6个(不包括手部)此次设计的焊接机器人为4自由度,四个自由度分别为:腕部的回转;小臂部分的伸缩;大臂部分的回转;大臂部分的伸缩。
按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。
由于本机械手在上下料时手臂具有升降、收缩及回转运动,因此,采用圆柱座标式。
相应的机械手具有三个自由度,为了弥补升降运动行程较小的缺点,增加手臂摆动机构,从而增加一个手臂上下摆、动的自由度。
工业实践机器人的结构形式主要有直角坐标型结构、圆柱坐标型结构、球坐标型结构、关节型结构四种。
工业机器人4[1].3_臂部手腕设计
![工业机器人4[1].3_臂部手腕设计](https://img.taocdn.com/s3/m/1040630169eae009581bec96.png)
Pq Fm Fg
2、臂部回转运动驱动力矩的计算
臂部回转运动驱动力矩应根据启动时产生的惯性力矩 与回转部件支承处的摩擦力矩来计算。由于升速过程一 般不是等加速运动,故最大驱动力矩要比理论平均值大 一些,一般取平均的1.3倍。驱动力矩 M q (可N 按• m下) 式计 算:
此种传动机构的结构紧凑、轻巧、传动扭矩大, 能提高机械手的工作性能。在示教型的机械手中, 采用这类传动机构作手腕结构的比较多,但缺点 是手腕有一个“诱导运动”,因而要补偿。
下图为给图4-44所示手腕增加一个 3回60转 运动 后成为RBR三自由度手腕的传动示意图。当油缸1 中的活塞作左右移动时,通过链条、链轮2、锥齿 轮3和4带动花键轴5和6转动,而花键轴6与行星 架9连成一体,因而也就带动行星架作回转运动, 即为手腕所增加的作 的回36转0运动。
以由B关节和R关节组成许多种形式。此外,B关节 和R关节排列的次序不同,也会产生不同的效果, 也产生了其它形式的三自由度手腕。为了使手腕结 构紧凑,通常把两个B关节安装在一个十字接头上, 这对于BBR手腕来说大大减小了手腕纵向尺寸。
2.按驱动方式分类
(1)直接驱动手腕。
手腕因为装在手臂末端,所以必须设计得十分紧凑, 可以把驱动源装在手腕上。下图所示是Moog公司的 一种液压直接驱动的BBR手腕,设计紧凑巧妙。Ml、 M2 、M3是液压马达,直接驱动手腕的偏转、俯仰和翻转 三个自由度轴。这种直接驱动手腕的关键是能否选到 尺寸小、重量轻而驱动力矩大、驱动特性好的驱动电 机或液压驱动马达。
机器人手腕的设计与研究

机器人手腕的设计与研究摘要:对于机器人腕部结构进行了设计和优化,取消了传统的带轮结构和单动力输入结构,采用了齿轮传动,回转和俯仰使用不同的电机驱动,从而提高了刚度、效率、灵活性和载重量,减小了空间。
关键词:齿轮,回转,俯仰,紧凑1. 机器人的定义从1920年《罗萨姆的万能机器人》的剧作中出现机器人这个词以后机器人随着时代的发展其定义也是越来越完善。
国际标准化组织(ISO)给出的机器人定义较为全面和准确,其定义如下:1.机器人的动作机构具有类似人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖人的的干预。
这些全面的定义也就决定了机器人领域必定是一个多学科、多领域交叉的领域。
其中主要的研究领域有:①机器手设计;②机器人运动学和动力学;③机器人轨迹规划;④机器人驱动技术;⑤机器人传感器;⑥机器人视觉;⑦机器人控制语言与离线编程;⑧机器人本体结构;⑨机器人控制系统;⑩智能机器人等。
涉及的学科范围主要有:①力学,主要包括工程力学、弹塑性力学、结构力学等;②机器人拓扑学,主要包括结构拓扑学即拓扑结构类型综合与优选;③机器人轨迹规划;④电子学与微电子学;⑤控制论;⑥机计算机;⑦生物学;⑧人工智能;⑨系统工程学。
2. 腕部的基本形式与特点人类的手是最灵活的肢体部分,能完成各种各样的动作和任务。
同样机器人的手部作为末端执行器是完成抓握工件或执行特定作业的重要部件,也需要有多种结构。
腕部是臂部与手部的连接部件,起支撑手部和改变手部姿势的作用。
从驱动方式上看手腕有两种形式,远程驱动和直接驱动。
直接驱动是指驱动器安装在手腕运动关节的附近直接驱动关节运动,因而传动路线短,传动刚度好,但腕部的尺寸和质量大,惯性大,由于现在技术的改进机电和传动原件都趋于小型化,这样的情况都有较大改观。
机械手腕部设计

1.1 机器人组成
机器人主要由驱动装置、控制系统和执行机构三大部分组成。
1.1.1 驱动装置
工业机器人的驱动装置包括驱动器和传动机构两部分,它们通常与执行机构 连成一体。传动机构常用的有谐波减速器、滚珠丝杠、链、带以及各种齿轮轮系。 驱动器通常有电机(直流伺服电机,步进电机,交流伺服电机),液动和气动装置, 目前使用最多的是交流伺服电机。
本课题通过对通用机器人 smart6.50R 的结构进行分析和研究,完成对其腕 部的设计,并借助 CAD/CAE 软件完成从建模到运动学分析、应力分析的全过程。 最终期望腕部与小臂、手部、大臂能够协调工作,能够完成各种现代工业加工过 程中所要求的动作。
本课题的设计思路是:借助已有的通用机器人的腕部设计思想和方法,综合 考虑腕部机构在机器人运动中所起的作用和机器人的整体技术参数以及结构特 点,然后选择合理的机构,确定传动线路,然后对机构进行分析,计算主要参数, 并对部分零件进行设计、组装,综合评价腕部系统。
机器人一般分为三类。第一类是不需要人工操作的通用机器人。它是一种独 立的不附属于某一主机的装置。它可以根据任务的需要编制程序,以完成各项规 定操作。它的特点是除了具备普通机械的物理性能之外,还具备通用机械、记忆 智能的三元机械。它可以灵活运用在工业上的各个方面,如喷漆、焊接、搬运等。 第二类是需要人工操作的,称为机械机。它起源于原子、军事工业,先是通过操 作机来完成特定的作业,后来发展到用无线电讯号操作机器人来进行探测月球 等。工业中采用的锻造操作机也属于这一范畴。第三类是专用机器人,主要附属 于自动机床或自动线上,用以解决机床上下料和工件传送。这种机器人在国外称 为“Mechanical Hand ",它是为主机服务的,由主机驱动;除少数外,工作程序 一般是固定的,采用机械编程。因此是专用的。
焊接机械手的结构设计

焊接机械手的结构设计摘要本设计为焊接机械手的结构设计,主要研究内容:腰部回转机构的设计;大、小臂和腕部回转的结构设计。
本设计由整体布局入手,参考现有关节型机械臂的相关设计,初步确定腰部的转动惯量,从而确定电机的选型,安装等相关设计。
在机械臂的灵活和精度的前提下完成总体结构的设计,然后根据总体结构,从而确定本设计的机械臂各个主要零部件的设计。
在主要零部件的设计中,主要包括腰部壳体的设计、轴的结构设计、轴承的选择、电机的设计计算、大小臂的结构和固定等。
本设计整体在现有关节型机械臂的结构上做了修改,使得它能够更好的满足本设计的设计要求。
本设计结构简单、重量轻、外形尺寸小、设备费用低、运转安全、操作方便、便于维修和管理。
关键词:机械手;谐波减速器;结构设计Structure design of robot armAbstractThe design for the design of welding structure of the manipulator, the main research contents: the design of the waist turning mechanism;structure design of large, small arm and wrist rotation.This design by the overall layout with reference to the relevant design, the existing joint type manipulator, preliminary determine the moment of inertia of the waist, so as to determine the motor selection, installation and other related design. Complete the design of the overall structure of the flexible manipulator based on precision and the next, and then based on the overall structure, design of mechanical arm to determine the design of all the major components of the.The design of the main components, including the housing design, structural design of shaft, bearing selection, design and calculation of the size of motor, arm structure and fixed.The design of the whole made changes in the existing joint type manipulator structure, so that it can better meet the design requirement of this design. The design has simple structure, light weight, small size, low cost of equipment, operation safety, convenient operation, easy to repair and management.KeyWords:robot arm;harmonic drive;structure design目录1 绪论 (1)1.1 机器人简介 (1)1.1.1 机器人的发展及应用 (2)1.1.2 点焊机器人介绍及其研究意义 (4)1.1.3 机器人的组成 (6)1.2 机械手的组成 (8)1.3 本文主要研究工作 (11)2 机械手的总体结构 (12)2.1 机械手总体结构的类型 (12)2.2 设计具体采用方案 (13)3 机械手腰部机座 (15)3.1 机械手腰部机座结构的设计 (15)3.2 机械手腰部机座设计的具体采用方案 (15)3.3 电动机的选择 (16)3.4 减速器的选择 (17)3.5 键的选择 (18)4 机械手手臂的结构设计 (20)4.1 设计具体采用方案 (21)4.2 大臂电动机的选择 (21)4.3 大臂减速器的相关计算 (22)4.4 小臂电动机的选择 (23)4.5 小臂减速器的相关计算 (24)5 机械手腕部的结构方案设计 (27)5.1 腕部电动机的选择 (27)5.2 腕部减速器的选择 (27)6 轴承的选用与校核 (29)7 结论 (39)参考文献................................................................................... 错误!未定义书签。
详解机器人手腕结构图

详解机器人手腕结构图————————————————————————————————作者:————————————————————————————————日期:【详解】机器人手腕结构图机器人手腕是连接末端操作器和手臂的部件,它的作用是调节或改变工件的方位, 因而它具有独立的自由度,以使机器人末端操作器适应复杂的动作要求。
工业机器人一般需要6个自由度才能使手部达到目标位置并处于期望的姿态。
为了使手部能处于空间任意方向, 要求腕部能实现对空间三个坐标轴x、y、z的转动,即具有翻转、俯仰和偏转三个自由度,如图2.31所示。
通常也把手腕的翻转叫做Roll,用R表示;把手腕的俯仰叫做Pitch,用P表示; 把手腕的偏转叫Yaw,用Y表示。
图2.31 手腕的自由度(a)绕z轴转动; (b)绕y轴转动; (c) 绕x轴转动;(d) 绕x、y、z轴转动手腕的分类1.按自由度数目来分手腕按自由度数目来分, 可分为单自由度手腕、2自由度手腕和3自由度手腕。
(1)单自由度手腕,如图2.32所示。
图(a)是一种翻转(Roll)关节, 它把手臂纵轴线和手腕关节轴线构成共轴形式。
这种R关节旋转角度大, 可达到360°以上。
图(b)、(c)是一种折曲(Bend)关节(简称B关节), 关节轴线与前后两个连接件的轴线相垂直。
这种B关节因为受到结构上的干涉, 旋转角度小,大大限制了方向角。
图(d)所示为移动关节。
图2.32单自由度手腕(a) R手腕;(b) B手腕;(c)Y手腕;(d) T手腕(2) 2自由度手腕,如图2.33所示。
2自由度手腕可以由一个R关节和一个B关节组成BR手腕(见图2.33(a)),也可以由两个B关节组成BB手腕(见图2.33(b))。
但是,不能由两个R关节组成RR手腕,因为两个R共轴线,所以退化了一个自由度, 实际只构成了单自由度手腕,见图2.33(c)。
图2.33 二自由度手腕(a) BR手腕; (b) BB手腕; (c) RR手腕(3)3自由度手腕,如图2.34所示。
7自由度工业机器人机械结构设计说明书

摘要7自由度工业机器人以工作范围大、动作灵活、结构紧凑、能抓取靠近机座的物体等特点备受设计者和使用者的青睐。
由于有一个冗余自由度,很容易在确保最佳焊接姿势的同时,避免工件以及夹具对机器人工作臂的干扰。
本论文首先根据机器人持重3、工作范围1434、本体重量150,确立kg mm kg机器人为S腰部回转、L小臂摆动、E大臂回转、U臂部俯仰、R腕部扭转、B 腕部俯仰、T腕部回转的7自由度关节型弧焊机器人的总体结构;分析机器人的各个关节在转动惯量、角速度、加速度等技术指标下的工作状况,确定7个关节都采用交流电机驱动、机器人手臂专用减速器传动,同时B、T腕部关节还用到同步带传动。
通过计算各关节所需电机的功率和转矩、减速器的减速比、同步带的要求并选型;用UG NX6.0画出机器人的各关节三维仿真模型,并装配成型。
本课题研究具有广泛的实际意义和应用前景。
设计的7自由度工业机器人为后续的机器人动力学分析和运动控制提供了参考依据,并可以做进一步的研发。
关键词:7自由度,工业机器人,机械结构Abstract7 dof industrial robots with large scope of work, flexible, compact structure, can grab the object near the base are famous among so much designers and users. Because there is a redundant freedom, it is easy to ensure the best welding position at the same time, avoid workpiece and fixture work on the robot arm interference.In this thesis, according to the robot puts up , the scope of work is ,3kg1434mm body weight is ,establish 7 dof150kg joint structure of arc-welding robot including S waist, L arm swing, E arm rotation, U pitching arm, R wrist turn, B wrist pitch, T wrist rotation. Analysis of the various robot joints in moment of inertia, angular velocity, acceleration and other technical indicators of the work under the conditions identified seven joints driven by AC motor, the robot arm dedicated reducer drive, while B, T wrist joint is also used in synchronous belt drive. Required by calculating the joint motor power and torque, reduction ratio reducer, belt requirements and selection; robot with UG NX6.0 draw three-dimensional simulation model of each joint, and assembly molding.This research has extensive practical significance and application prospect. 7 dof industrial robots designed for the follow-up dynamics analysis and motion control and provide a reference, and can do further research and development.Key words: 7 dof, industrial robot, mechanical structure目录摘要 (I)Abstract (II)目录 (III)第一章绪论 (1)1.1 课题背景 (1)1.2 国内外工业机器人的发展概况 (2)1.2.1 国内外工业机器人的发展现状 (2)1.2.2 工业机器人的发展趋势 (4)1.3 课题来源 (5)1.4 主要研究内容 (6)第二章7自由度工业机器人总体方案设计 (7)2.1 机器人机械设计的特点 (7)2.2 与机器人有关的概念 (7)2.3 机器人的基本技术要求 (9)2.4 机器人手臂结构型式 (10)2.5 机器人结构方案的分析 (12)2.5.1 7自由度工业机器人的外形结构设计 (12)2.5.2 7自由度工业机器人的关节结构设计 (15)2.6 机器人的驱动方式的选择 (19)2.7 7自由度机器人的控制系统 (20)2.7.1 7自由度工业机器人控制系统硬件部分 (20)2.7.2 7自由度工业机器人控制系统软件部分 (21)2.8 本章小结 (21)第三章7自由度工业机器人结构设计 (22)3.1 引言 (22)3.2 减速器类型选择 (23)3.3 同步带类型选择 (24)3.4 机器人结构设计 (25)3.4.1 T腕部回转关节交流伺服电机和减速器、同步带的选择 (25)3.4.2 B腕部摆动关节交流伺服电机和减速器、同步带的选择 (30)3.4.3 R回转关节交流伺服电机和减速器的选择 (36)3.4.4 U回转关节交流伺服电机和减速器的选择 (38)3.4.5 E回转关节交流伺服电机和减速器的选择 (40)3.4.6 L摆动关节交流伺服电机和减速器的选择 (42)3.4.7 S腰部回转关节交流伺服电机和减速器的选择 (44)3.4.8 电机、减速器、同步带选型总表 (47)3.5 电机型号 (48)3.5.1 SGMGH系列1500转电机 (48)3.5.2 SGMPH系列3000转电机 (49)3.6 本章小结 (51)第四章7自由度工业机器人三维结构设计 (52)4.1 机器人各个关节三维图 (52)4.1.1 底座造型图 (52)4.1.2 S腰部回转关节造型图 (53)4.1.3 L小臂摆动关节造型图 (56)4.1.4 E大臂回转关节造型图 (60)4.1.5 U臂部俯仰关节造型图 (60)4.1.6 R腕部扭转关节造型图 (61)4.1.7 B腕部俯仰关节造型图 (62)4.2 机器人装配图 (65)4.3 本章小结 (66)第五章结论和展望 (67)5.1 结论 (67)5.2 技术经济分析报告 (68)5.2.1 技术可行性分析 (69)5.2.2 技术优越性分析 (69)5.3 展望 (69)参考文献 (71)致谢 (73)声明 (74)第一章绪论1.1 课题背景机器人是典型的机电一体化装备,除了在制造业、农业、医疗、海洋开发、航天工程等方面得到了越来越广泛的应用之外,也渗透到人们生活的各个方面,随着工业机器人向更深、更广方向的发展以及机器人智能化水平的提高,机器人的应用范围还在不断地扩大。
垂直多关节机器人臂部和手部设计
目录1 前言 (1)1.1课题来源 (1)1.2技术要求及预期效果 (1)1.3本课题要解决的主要问题及设计总体思路 (1)1.4国内外研究现状及发展状况 (1)1.4.1 研究现状 (1)1.4.2 发展趋势 (2)2 总体方案设计 (4)2.1机械结构类型的确定 (4)2.2传动方案的确定 (4)2.3工作空间的确定 (5)2.4手腕结构的确定 (5)2.5驱动装置的选择 (6)2.5.1 机器人驱动方案的分析和选择 (6)2.5.2 手腕电机的选择 (7)2.5.3 传动比的确定及分配 (8)3 齿轮的设计 (9)3.1齿轮强度的设计与校核 (9)3.1.1第一级圆柱齿轮传动设计 (9)3.1.2 第二级圆锥齿轮传动设计 (12)4 轴的设计 ........................................................................................... 错误!未定义书签。
4.1转腕传动轴的选择 ....................................................................... 错误!未定义书签。
4.2摆腕传动轴的设计 ....................................................................... 错误!未定义书签。
4.2.1 圆柱齿轮轴的设计 ..................................................................... 错误!未定义书签。
4.2.2 轴的强度校核 ............................................................................. 错误!未定义书签。
4.2.3 圆锥齿轮轴的设计 ..................................................................... 错误!未定义书签。
三自由度机械手腕的设计

三自由度机械手腕的设计目录目录摘要 ..................................................................... ............................................ ,Abstract ............................................................... ....................................................... 2 1绪论 ..................................................................... (3)1.1工业机器人简介 ..................................................................... . (3)1.2 工业机器手简介 ..................................................................... ..................... 3 2 工业机器人手腕的总体设计 ..................................................................... (4)2.1机器人手腕总体设计概述 ..................................................................... . (4)2.2腕部的结构特点 ..................................................................... . (6)2.2.1 概述 ..................................................................... . (6)2.2.2单自由度手腕 ..................................................................... . (6)2.2.3二自由度手腕 ..................................................................... . (7)2.2.4三自由度手腕 ..................................................................... . (7)2.2.5柔顺手腕结构 ..................................................................... . (8)2.3 腕部的驱动机构 ..................................................................... (9)2.4设计要求 ..................................................................... ................................ 10 3 机器人手腕的机械系统设计 ..................................................................... .. (11)3.1三个自由度的实现 ..................................................................... . (11)3.2传动机构的设计 ..................................................................... .. (13)3.3手腕内部其他结构的设计 ..................................................................... ..... 14 4 机器人手腕的机械传动装置设计计算 (16)4.1锥齿轮12,13的设计计算 ..................................................................... (16)4.1.1 选材料并确定初步参数 ...................................................................164.1.2 齿面接触疲劳强度计算 ...................................................................164.1.3 齿根抗弯疲劳强度验算 ...................................................................174.1.4 主要几何尺寸计算 ..................................................................... (18)4.2锥齿轮17,16的设计...................................................................... . (18)4.2.1选材料并确定初步参数 ....................................................................18I目录4.2.2 齿面接触疲劳强度计算 ...................................................................194.2.3 齿根抗弯疲劳强度验算 ...................................................................204.2.4 主要几何尺寸计算 ..................................................................... (21)4.3 同步带传动设计 ..................................................................... . (22)4.3.1 设计功率 ..................................................................... ................ 22 Pd4.3.2 带轮的基本尺寸 ..................................................................... .......... 23 5 三维造型的绘制 ..................................................................... .. (24)5.1 造型软件简介 ..................................................................... .. (24)5.2典型零件的绘制 ..................................................................... .................... 27 结论 ..................................................................... ................................................ 53 致谢 ..................................................................... ................................................ 54 参考文献 ..................................................................... .. (55)II摘要摘要在工业上,机器人有着广泛的应用,尤其是在高温,高压,粉尘,噪音,以及带有放射性和污染的场合。
关节型机器人腕部结构设计
优秀设计学科门类:单位代码:毕业设计说明书(论文)关节型机器人腕部结构设计学生姓名所学专业班级学号指导教师XXXXXXXXX系二○**年X X月任务书一、设计内容题目来源于生产实际。
设计一个用于焊接的关节型机器人,进行机器人的总体方案设计、腕部及执行器结构设计及其零件设计。
二、设计依据焊接关节型机器人具有六个自由度,腰关节回转,臂关节俯仰,肘关节俯仰,腕关节仰腕、摆腕和旋腕,腕部最大负荷4kg,最大速度2m/s,最大工作空间半径1500mm。
三、技术要求1、机器人应能满足工作要求,保证焊接精度;2、工作可靠,结构简单;3、装卸方便,便于维修、调整;4、尽量使用通用件,以便降低制造成本。
四. 主要参考文献:1、殷际英.何广平.关节型机器人:北京:化学工业出版社,2003.2、马香峰.工业机器人的操作机设计.北京:冶金工业出版社,1996.3、费仁元.张慧慧.机器人机械设计和分析.北京:北京工业大学出版社,1998.4、周伯英.工业机器人设计.北京:机械工业出版社,1995.5、蔡自兴.机器人学.北京:清华大学出版社,2000.6、宗光华,刘海波译.机器人技术手册. 北京:科学出版社,1996.7、徐卫良,钱瑞明译.机器人操作的数学导论. 北京:机械工业出版社,1998.8、孙迪生,王炎.机器人控制技术.北京:机械工业出版社,1998.9、徐灏.机械设计手册.第二版.北京:机械工业出版社,2000.10、成大先.机械设计手册.第4版. 北京:化学工业出版社,2002.开题报告关节型机器人腕部结构设计摘要:为了提高生产效率和焊接质量,满足特定的工作要求,本题设计用于焊接的关节型机器人的手腕和末端执行器。
根据机器人的工作要求进行了机器人的总体设计。
确定机器人的外形时,拟定了手腕的传动路径,选用直流电动机,合理布置了电机、轴和齿轮,设计了齿轮和轴的结构,并进行了强度校核计算。
传动中采用了软轴、波纹管联轴器和行星齿轮机构,实现了摆腕、转腕和提腕的三个自由度的要求。
五关节教程机械手——说明书

基于PLC的五轴教学机械手设计摘要本毕业设计要求学生掌握机械手或工业机械手的结构及工作原理,设计一关节型五轴教学用机械人的控制系统。
整个设计以控制为主,结构设计可参考同类机械人。
机械人共有五个关节动作和一个抓手动作,使用五个步进电机分别控制五个关节的动作,抓手的抓物动作由气阀控制。
控制箱部分由电源、可编程控制器、步进电机驱动模块及相应的按钮组成,具有手动和自动控制功能。
所设计机械人可进行简单机械手模拟控制的实验。
主要任务包括机械手总体设计、型式选择、机械手的I/O配置、设计机械手的流程图、设计机械手的梯形图、编制机械手的语句表、选择传感器等元件及设计系统图。
关键词:教学机械手,五自由度,步进电机,气阀控制,PLCPLC-based teaching of five-axismanipulator designAbstractDesign requirements of the graduate students to master the structureand working principle of manipulator or industrial robot , design acontrol system of the five-axis teaching type robot. The whole design isbase on control system.structural design can refer to the same robot. There are five robot joint action and a handle movement, the movement offive joints were controlled by five separate stepper motor , the grasping movements were controlled by the valve. Control box in part by the power supply, programmable controller, stepper motor drive module and the corresponding button of the function with manual and automatic control. Designed robot manipulator can be simple analog control experiment.The main tasks include robot design, type selection, the robot I /O configuration, the flow chart of robot design, the ladder diagram ofrobot design,the STL of robot design , select the design of sensor components and systems.Keywords: Teaching manipulator,Five degrees of freedom,Stepping Motor,Valve control, PLC目录绪论 (1)第一章机械手的总体设计 (3)1.1运动设计要求 (3)1.2驱动系统的选择 (3)1.3教学型五关节机械手机构简图 (3)第二章气动机械手的气缸设计 (5)2.1基座及连杆的结构 (5)2.1.1基座的结构 (5)2.1.2大臂的结构 (6)2.1.3小臂的结构 62.1.4手腕的结构72.2机械手手部的设计 (8)2.2.1根据课程选择手部类型 (8)2.2.2手部的设计 (8)2.3机械手的驱动与转动 (10)2.3.1手臂部分的传动方案 (11)2.3.2手指驱动缸的设计和选定 (14)第三章机械手的控制系统设计 (19)3.1步进电机控制系统的设计 (19)3.1.1PLC对步进电机的控制 (19)3.1.2脉冲分配器的选择 (20)3.1.3功率放大电路的设计 (22)3.2气动部分控制系统的设计 (23)3.2.1气动系统的介绍 (24)3.2.2气动系统的分类253.2.3气动控制方式253.2.4装置的技术要求273.2.5控制方式的选择273.2.6气动回路的设计273.2.7传感器的选择33 第四章机械手PLC程序设计 (37)4.1PLC概述 (37)4.2输入和输出点分配表 (37)4.3PLC软件程序 (39)4.3.1 PLC 梯形图 (39)4.3.2 PLC 语句表 (43)4.3.3机械手控制面板 (45)参考文献 (46)绪论一、机械手的研究现状热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要介绍了焊接机器人技术发展的历程及我国焊接机器人技术研究的现状和发展前景。
针对焊接机器人产业化中涉及到的新型结构本体设计、高性能机器人控制器技术及免维护系统设计等关键技术进行了研究,结合Motomanup-6焊接机器人,介绍了采用谐波齿轮减速器及交流伺服电机等精密传动部件进行机器人小臂和腕部结构设计,使得机器人结构变得越来越简单,传动环节减少,提高了系统的精度,减少维护,同时也简化了生产工艺,降低了生产成本。
我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、铁路机车等几个主要行业。
汽车是焊接机器人的最大用户,也是最早用户。
早在70年代末,上海电焊机厂与上海电动工具研究所,合作研制的直角坐标机械手,成功地应用于上海牌轿车底盘的焊接。
我国到1997年底仅有焊接机器人500台,多为弧焊和点焊机器人,而且集中于汽车、摩托车和工程机械三个制造行业,因此我国焊接机器人的发展应首先扩大应用数量和应用领域。
同时也要尽快建立有我国自主知识产权的机器人生产产业。
关键词:弧焊焊接机器人、小臂腕部结构、交流伺服系统AbstractIntroduced a welding robot technology development and the history of China's welding robot technology on the status and development prospects. For welding robot involved in the industrialization of the new body structure design, high-performance robot controller technology and maintenance-free system design and other key technologies have been studied, with Motomanup-6 welding robot, introduced the use of harmonic gear reducer AC servo motor and transmission components such as precision robot arm and wrist structural design, makes robots become more and more simple structure, reduce the transmission links, increase the accuracy of the system, reduce maintenance, but also simplified the production process, reducing The cost of production.China's welding robot application mainly concentrated in the automobile, motorcycle, engineering machinery, railway locomotive, and several other major industries. Motor vehicles are the largest users of robots welding, but also the first users. Back in the late 1970s, Shanghai electric welding machine tool factory and the Shanghai Institute of cooperation in the development of the Cartesian coordinate manipulator, successfully applied to the Shanghai sedan chassis welding. China to the end of 1997 only 500 robot welding, spot welding and more robots for welding, and focus on vehicles, motorcycles and three construction machinery manufacturing industry, the development of China's welding robot should first expand the number of applications and application field. At the same time, as soon as possible the establishment of China's independent intellectual property rights of the robot manufacturing industry.Keywords:arc welding robot, small arm and wrist structural design, AC servo system目 录第一章 前言 (1)1.1 选题背景 (1)1.2焊接机器人毕业设计问题的提出 (4)1.2.1研究的基本内容,拟解决的主要问题 (4)1.2.2研究步骤、方法 (4)第二章 焊接机器人结构设计 (6)2.1小臂腕及结构设计 (6)2.1.1焊接机器人小臂及腕部结构设计方案 (6)2.1.2小臂及腕部整体机构的工作原理 (7)2.2电机的选择 (8)2.3直齿圆锥齿轮设计: (9)2.3.1传动比的选择 (9)2.3.2渐开线直齿圆锥齿轮几何计算 (9)2.4链的选择及链轮设计 (11)2.4.1链传动的特点 (11)2.4.2传动链的分类 (12)2.4.3链的选择 (13)2.5轴承的分类介绍 (14)2.6小臂腕部结构设计中必要的强度校核 (16)2.6.1圆锥齿轮强度校核 (16)2.6.2轴的强度校核 (17)第三章 谐波减速器 (28)3.1谐波减速器的发展 (28)3.2谐波减速器的应用 (28)3.3 谐波减速器的组成及工作原理 (29)3.3.1柔轮常见的结构形式 (29)3.3.2波发生器常见的结构型 (30)3.3.3谐波减速器的工作原理 (30)3.3.4双刚轮谐波减速器 (32)3.4谐波齿轮传动特点 (33)3.5谐波减速器产品系列及结构的特点 (34)3.6谐波减速器的选择 (35)3.7谐波减速器的安装使用与维护(本此设计所需系列) (37)第四章 经济性分析 (38)致谢 (39)参 考 文 献 (40)声明 (42)第一章 前 言机器人是一种在生产中能灵活完成特定操作,并有多种功能的机器。
机器人一般由以下几部分组成:控制系统,驱动系统,执行(运动)装置,检测系统。
机器人的控制系统包括:控制电脑和伺服控制器。
机器人的动力驱动主要有:电动、气动、液压驱动等。
机器人的执行(运动)部分主要指机器人用于完成任务的机体装置,主要由机械传动系统和末端执行器组成。
传动机构用于把驱动器产生的动力传递到机器人的各个关节和动作部位,实现机器人平稳运动。
常见的传动机构有以下几种:a、齿轮传动b、丝杠传动机构c、皮带传动和链传动机d、流体传动e、连杆传动:机器人的检测系统是指机器人身上的各种传感器。
机器人最常采用的基本传感器有:视觉传感器、力觉传感器、触觉传感器、位移传感器、速度传感器、加速度传感器等。
传感器是机器人的感觉器官机器人工作时,电脑根据传感器获得的信息控制机器人动作。
它主要分为内部传感器和外部传感器两大类。
工业机器人是一种能自动控制、可重复编程、具有多功能多自由度的操作机,是机器人家族中最重要的成员,主要由机械手臂、控制装置、机座、能源装置和驱动装置等几部分构成从结构上分为:模仿人类关节结构的关节型工业机器人、直角坐标型机器人、圆柱坐标型机器人、球坐标机器人。
从用途上可分为:焊接机器人、机器加工机器人、装配机器人、喷漆机器人、检查、测量机器人、移动式搬运机器人等等。
焊接机器人主要包括弧焊机器人和点焊机器人。
有用于大工件焊接的大型焊接机器人,也有用于小工件焊接的精巧小型焊接机器人;有单台操作,也有两台以上的组合操作。
经过四十多年的发展,工业机器人已在越来越多的领域得到了应用。
在制造业中,尤其是在汽车产业中,工业机器人得到了广泛的应用。
如在毛坯制造(冲压、压铸、锻造等)、机械加工、焊接、热处理、表面涂覆、上下料、装配、检测及仓库堆垛等作业中,机器人都已逐步取代了人工作业[1][2]。
1.1选题背景随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范周还在不断地扩大,已从汽车制造业推广到其他制造业,进而推广到诸如采矿机器人、建筑业机器人以及水电系统维护维修机器人等各种非制造行业。
此外,在国防军事、医疗卫生、生活服务等领域机器人的应用也越来越多,如无人侦察机(飞行器)、警备机器人、医疗机器人、家政服务机器人等均有应用实例。
机器人正在为提高人类的生活质量发挥着重要的作用。
据不完全统计,全世界在役的工业机器人中大约有将近一半的工业机器人用于各种形式的焊接加工领域,焊接机器人应用中最普遍的主要有两种方式,即点焊和电弧焊。
这两种焊接机器人在工业机器人中所占的大致比例。
我们所说的焊接机器人其实就是在焊接生产领域代替焊工从事焊接任务的工业机器人。
这些焊接机器人中有的是为某种焊接方式专门设计的,而大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。
在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务,机器人可以根据程序要求和任务性质,自动更换机器人手腕上的工具,完成相应的任务。
因此,从某种意义上来说,工业机器人的发展历史就是焊接机器人的发展历史。
工业机器人在焊接领域的应用最早是从汽车装配生产线上的电阻点焊开始的。
原因在于电阻点焊的过程相对比较简单,控制方便,且不需要焊缝轨迹跟踪,对机器人的精度和重复精度的控制要求比较低。
点焊机器人在汽车装配生产线上的大量应用大大提高了汽车装配焊接的生产率和焊接质量,同时又具有柔性焊接的特点,即只要改变程序,就可在同一条生产线上对不同的车型进行装配焊接。
在西方国家,由于劳动力成本的提高为企业带来了不小的压力,而机器人价格指数的降低又恰巧为其进一步推广应用带来了契机。