如何设计最优化的状态机
第10讲 有限状态机(moore型)的设计

2 为什么使用状态机
有限状态机克服了纯硬件数字系统顺序方式控制不灵 活的缺点。
状态机的结构模式相对简单。
状态机容易构成性能良好的同步时序逻辑模块。
状态机的VHDL表述丰富多样,结构清晰。 在高速运算和控制方面,状态机更有其巨大的优势。 就可靠性而言,状态机的优势也是十分明显的。
001 100 100
B方向 (红绿黄) 100
100 010 001
12.4 Moore型状态机设计方法
画出状态转移图:
S0
———— 010100
S1
———— 001100
S3 ————
100001
S2
———— 100010
12.4 Moore型状态机设计方法
实体设计
LIBRARY IEEE; USE IEEE.STD_LOGIC_1164.ALL; ENTITY jtd IS PORT( clk:IN STD_LOGIC; ZO:OUT STD_LOGIC_VECTOR(5 DOWNTO 0)); END jtd;
4 Moore型状态机设计方法
仿真波形
4 Moore型状态机设计方法
练习:位于十字路口的交通灯,在A方向和B方向 各有红、黄、绿三盏灯,每10秒变换一次。变换 顺序如下表: A方向 B方向
绿
黄 红
红
红 绿
红
黄
4 Moore型状态机设计方法
交通灯的全部状态及输出:
状态
S0 S1 S2 S3
A方向 (红绿黄) 010
VHDL描述 VHDL描述一般使用枚举类型定义状态机。
未收到一个有效位(0) 收到一个有效位(1) 连续收到两个有效位(11) 连续收到三个有效位(110) 连续收到四个有效位(1101) :S0 :S1 :S2 :S3 :S4
设计模式之状态机模式

设计模式之状态机模式 Hello,笔者最近⼯作被领导要求写了⼀个状态机,说实在的,笔者之前从来没有写过状态机(越做⼯作越发现⾃⼰越菜),所以不得已找了⼀些⽹上的⼀些资料,发现其实状态机也有特定的设计模式的,所以我想针对我这个项⽬来聊⼀聊状态机这个事情。
说实在的,这个事情看起来不太⼤,但是⾥⾯要注意的东西真⼼不少,因此,笔者决定分成两篇博客来写,这篇博客主要针对状态模式以及我的项⽬来初步的了解状态机怎么写,之后的⽂章就聊⼀聊项⽬中应该注意的点以及状态机写的时候应该注意些什么。
⼀、状态机是什么 ⼆、项⽬背景⼤致说明 三、状态机设计思想和图 四、状态模式和策略模式的区别 ⼀、状态机是什么? 所谓状态机,就是当⼀个对象状态转换的条件表达式过于复杂的时候,把状态的判断逻辑转换到不同状态的⼀系列类当中去。
这样解释可能有点抽象,我们举⼀个简单的例⼦,我们以电梯为例,电梯可以分成开门,关门,上升/下落,停⽌这五个部分。
⾸先我们要明确两点,就是⾸先这五种状态在同⼀时间只能出现⼀个,其次,这五种状态在满⾜某种条件后是可以相互转换的,⽐如下落到某楼层后就会进⼊停⽌状态,那么这也是状态机使⽤的两个前提,第⼀,在某段时间内只准许出现⼀种状态,第⼆,这些状态在满⾜某些条件后是可以相互转换的。
⼆、项⽬背景⼤致说明 这个项⽬背景⼤概是这样的,当前我们有四个状态,分别为IDLE状态,PREPARE状态,PROCESSING状态,POSTPONE状态,其中每种状态的切换依赖于两种条件(因为这⾥涉及到⼯作隐私,所以就不写那么详细了),另外,PREPARE状态,PROCESSING状态,POSTPONE状态如果持续⼀段时间,那么他们就会退回IDLE状态,⼤致情况就是这样,详情请看图⽚。
三、状态机的设计思想和类图 我的设计思想是这样的:⾸先整体分成六个类,我们姑且把这些类称为stateManager,IDLE,PREPARE,PROCESSING以及POSTPONE以及FSMInterface类。
状态机程序设计

典型状态机设计由状态信号定义、准备下一状态进程、状态切换进程、输出进程等四部分构成。 【例6-1】用FPGA/CPLD控制AD574进行12位A/D转换,并将转换结果保存在Q0~Q11中
CE
CS
RC
X12/8
A0
工作状态
0
X
X
X
X
禁止
X
1
X
X
X
禁止
1
0
0
X
0
启动12位转换
状态信号定义:采用枚举数据类型定义系统中有哪些状态,并定义当前状态信号、下一状态信号。一般放在结构体的ARCHITECTURE和BEGIN之间。
在数字系统中,每一状态对应一个二进制数,称状态编码。如AD574控制有5个状态,可用3位二进制表示:(000、001、010、011、100)。
但设计者在状态机的设计中,为了更利于阅读、编译和VHDL综合器的优化,往往将表征每一状态的二进制数组用文字符号来代表,即所谓状态符号化。如(s0,sl,s2,s3,s4,s5),或者(READY,START,WAIT_H, WAIT_L ,READ, LOCK)等更直观的符号表示。
PROCESS(c_st,STATUS) --准备下一状态 BEGIN CASE c_st IS WHEN s0=>n_st<=s1; CE<=‘0’;RC<='0‘;LOCK<='0'; WHEN S1=>n_st<=s2; CE<=‘1’;RC<=‘0’;LOCK<='0‘; WHEN s2=>IF(STATUS='1') THEN n_st<=s3; ELSE n_st<=s2; END 1F; CE<=‘0’;RC<=‘0’;LOCK<=‘0’; WHEN s3=> IF(STATUS='1') THEN n_st<=s3; ELSE n_st<=s4; END 1F; CE<=‘0’;RC<=‘0’;LOCK<=‘0’; WHEN S4=>n_st<=s5;CE<=‘1’;RC<=‘1’;LOCK<=‘0’; WHEN S5=>n_st<=s0;CE<=‘1’;RC<=‘1’;LOCK<=‘1’; WHEN OTHERS=>n_st<=s0; CE<=‘0’;RC<=‘0’;LOCK<=‘0’; END CASE; END PROCESS;
如何设计自动驾驶系统的状态机
如何设计自动驾驶系统的状态机状态机模块在(自动驾驶)系统中扮演着关键的角色,它负责管理和控制各个功能的状态转换和行为执行。
今天我们来聊聊如何设计自动驾驶系统的状态机。
0.闲谈作为自动驾驶系统(工程师),从参与项目开始,就必不可少的与状态管理模块打交道,因为状态机在系统运行的全功能周期内起管理作用。
状态机这个模块,从技术实现角度来说,并没有什么难度,在网上有很多关于FSM(Fini(te)-state machine)的介绍文章,有兴趣可以自行了解。
但如何设计得巧妙、周到、精致,却很考验设计者的底蕴与对系统的理解。
大部分的(AD)AS功能都需要状态机进行状态管理,笔者手中就有不下十几份状态机的设计文档,包括FCW/LDW/AEB/(AC)C/LKA/NOP/APA/AVP等等,设计大相径庭,但细细想来内核却大同小异。
其中NOP功能的状态跳转还是比较复杂的,涉及横向、纵向控制与功能降级等逻辑,需要长期的雕琢与迭代才能设计出符合项目要求的效果。
笔者最近也在负责APA功能的状态机设计,虽然比较简单,但还是想借此机会对状态机模块做一点总结,也是对以往工作的回顾。
1.模块概述状态机模块的主要作用是跟踪系统的当前状态,并根据特定的事件和条件进行状态转换。
它可以根据(传感器)数据、车辆状态和系统输入来判断当前功能的可用性和执行条件。
状态机模块还能够监控系统的运行情况,及时响应来自驾驶决策或用户的指令,并根据需要触发相应的功能执行。
状态机模块通过定义和维护一组状态,以及状态之间的转换条件和行为,确保系统在不同的场景和条件下正确地执行相应的功能。
例如,当(检测)到前方车辆与本车距离过近时,FCW功能会被触发,状态机模块会根据预设的逻辑条件和行为来切换到相应的预警状态,并触发声音或振动等警示措施。
状态机模块的设计需要考虑各个功能之间的优先级、依赖关系和冲突情况。
它需要具备灵活性和可扩展性,以应对不同的道路情况和交通场景。
机器人程序设计中的状态机设计
机器人程序设计中的状态机设计一、前言工业机器人系统通常分为机器人本体和控制器两大部分。
微控制器的主要作用是根据用户的指令对机器人本体进行操作和控制,为每一个不同的机器人设计不同功能的控制程序是一个设计者经常感到困扰的难题。
许多机器人都是有多个任务的,这些任务间是相关联的,且每个任务都有明确的细致要求,这就使得机器人的控制设计难度增大。
在此,有一种叫状态机理论的相关概念,它能用在机器人的控制程序设计上。
二、有限状态机理论有限状态机,又称有限状态自动机,简称状态机。
有限状态机理论构成有限状态机的具体内容是:有限状态机是由寄存器组和组合逻辑构成的硬件时序电路。
它是由有限个状态相互间的转换构成的,下一个状态不但取决于各个输入值,还取决于当前的所有状态。
在任意时刻,当前状态就只能存在一个。
只有在有事件输入的条件下,状态才会产生并发出一个输出。
对在给定时刻要进行的活动的描述的是动作。
它包括了进入动作、退出动作、输入动作和转移动作四个动作。
三、有限状态机的优、缺点有限状态机,又称有限状态自动机,简称状态机,是表示有限个状态以及在这些状态之间的转移和动作等行为的数学模型。
它具有以下优缺点:优点:思路明确,内容简单易懂,状态间的关系明了,容易编程;只需要改动输出就可以改动机器人的动作要求;当发现程序不对时,更能快速的找到错误的点。
缺点:在每一个时刻,有且只有一个状态,没有并发性的表达方式,更不能描述异步并发系统;当设计需求的状态太多时,反而编程变得更耗时和困难。
四、基于状态转换方法的机器人的程序控制的设计实例状态机是具有基于状态的动态行为的机器。
它是一个动态系统,对时间和状态产生的时间做出反应。
一个状态机包含一组有限的状态和一组转换的集合。
其中状态描述运算中不同的阶段,而转换所描述的是如何使运算从一个状态变化到另一个状态。
依赖于此理论的有限性,才能发此理论用在机器人的编程设计上,设计时可以把机器人的每个动作按要求先合理分成多个状态,并给予特定的符号代表每个状态,在每个状态给予相应的输出要求,及机器人的动作和反映。
状态机电路设计

状态机电路设计
状态机电路是一种通过设计电路来实现状态转换的技术。
它通过
检测输入信号,并根据特定的规则进行状态转换来完成特定的功能。
其中最常见的是有限状态机,通过有限个状态以及状态之间的转换关
系来实现特定的功能。
在状态机电路的设计中,需要明确功能需求、输入输出信号以及
状态转换规则等。
首先,我们需要确定状态机所需完成的功能,即需
要实现的任务。
接着,我们需要对输入信号进行分析,确定输入的类
型以及输入对状态转换的影响。
进一步地,我们需要考虑输出信号的
类型及输出对状态转换的影响。
最后,我们需要设计状态转换规则,
确定状态之间的转换方式及转换条件。
在进行状态机电路设计时,还需要考虑系统的可扩展性、结构的
简单性以及可实现性等方面的因素。
为了实现这些目标,我们需要合
理地选取器件并采取合适的电路结构。
在实际的设计过程中,可能会
遇到一些问题,例如电路模型的建立、状态转换规则的定义等。
针对
这些问题,我们可以采用一些方法来解决,例如利用状态图来描述状
态转换规则等。
总之,状态机电路设计是一项相对复杂的技术,需要结合多方面
的知识和技能。
在设计过程中,需要充分考虑电路的功能、输入输出
信号以及状态转换规则等因素,并合理地选取器件和电路结构。
除此
之外,还需要利用一些工具和方法来解决设计过程中可能出现的问题。
通过科学合理地进行状态机电路设计,可以有效地提高电路的可靠性、可扩展性以及稳定性,为实现特定功能的控制提供坚实的技术支持。
状态机设计模式

状态机设计模式State模式的定义State模式的定义: 不同的状态,不同的⾏为;或者说,每个状态有着相应的⾏为.何时使⽤? State模式在实际使⽤中⽐较多,适合"状态的切换".因为我们经常会使⽤If elseif else 进⾏状态切换, 如果针对状态的这样判断切换反复出现,我们就要联想到是否可以采取State模式了. 不只是根据状态,也有根据属性.如果某个对象的属性不同,对象的⾏为就不⼀样,这点在数据库系统中出现频率⽐较⾼,我们经常会在⼀个数据表的尾部,加上property属性含义的字段,⽤以标识记录中⼀些特殊性质的记录,这种属性的改变(切换)⼜是随时可能发⽣的,就有可能要使⽤State.是否使⽤? 在实际使⽤,类似开关⼀样的状态切换是很多的,但有时并不是那么明显,取决于你的经验和对系统的理解深度. 这⾥要阐述的是"开关切换状态" 和" ⼀般的状态判断"是有⼀些区别的, " ⼀般的状态判断"也是有 if..elseif结构,例如:if (which==1) state="hello";else if (which==2) state="hi";else if (which==3) state="bye"; 这是⼀个 " ⼀般的状态判断",state值的不同是根据which变量来决定的,which和state没有关系.如果改成:if (state.euqals("bye")) state="hello";else if (state.euqals("hello")) state="hi";else if (state.euqals("hi")) state="bye"; 这就是 "开关切换状态",是将state的状态从"hello"切换到"hi",再切换到""bye";在切换到"hello",好象⼀个旋转开关,这种状态改变就可以使⽤State模式了. 如果单纯有上⾯⼀种将"hello"-->"hi"-->"bye"-->"hello"这⼀个⽅向切换,也不⼀定需要使⽤State模式,因为State模式会建⽴很多⼦类,复杂化,但是如果⼜发⽣另外⼀个⾏为:将上⾯的切换⽅向反过来切换,或者需要任意切换,就需要State了. 请看下例:public class Context{ private Color state=null; public void push(){ //如果当前red状态就切换到blue if (state==Color.red) state=Color.blue; //如果当前blue状态就切换到green else if (state==Color.blue) state=Color.green; //如果当前black状态就切换到red else if (state==Color.black) state=Color.red; //如果当前green状态就切换到black else if (state==Color.green) state=Color.black; Sample sample=new Sample(state); sample.operate(); } public void pull(){ //与push状态切换正好相反 if (state==Color.green) state=Color.blue; else if (state==Color.black) state=Color.green; else if (state==Color.blue) state=Color.red; else if (state==Color.red) state=Color.black; Sample2 sample2=new Sample2(state); sample2.operate(); }} 在上例中,我们有两个动作push推和pull拉,这两个开关动作,改变了Context颜⾊,⾄此,我们就需要使⽤State模式优化它. 另外注意:但就上例,state的变化,只是简单的颜⾊赋值,这个具体⾏为是很简单的,State适合巨⼤的具体⾏为,因此在(就本例)实际使⽤中也不⼀定⾮要使⽤State模式,这会增加⼦类的数⽬,简单的变复杂.例如: 银⾏帐户, 经常会在Open 状态和Close状态间转换.例如: 经典的TcpConnection, Tcp的状态有创建侦听关闭三个,并且反复转换,其创建侦听关闭的具体⾏为不是简单⼀两句就能完成的,适合使⽤State例如:信箱POP帐号, 会有四种状态, start HaveUsername Authorized quit,每个状态对应的⾏为应该是⽐较⼤的.适合使⽤State例如:在⼯具箱挑选不同⼯具,可以看成在不同⼯具中切换,适合使⽤State.如具体绘图程序,⽤户可以选择不同⼯具绘制⽅框直线曲线,这种状态切换可以使⽤State.如何使⽤State需要两种类型实体参与:1.state manager 状态管理器 ,就是开关 ,如上⾯例⼦的Context实际就是⼀个state manager, 在state manager中有对状态的切换动作.2.⽤抽象类或接⼝实现的⽗类,,不同状态就是继承这个⽗类的不同⼦类.以上⾯的Context为例.我们要修改它,建⽴两个类型的实体.第⼀步: ⾸先建⽴⼀个⽗类:public abstract class State{ public abstract void handlepush(Context c); public abstract void handlepull(Context c); public abstract void getcolor();} ⽗类中的⽅法要对应state manager中的开关⾏为,在state manager中本例就是Context中,有两个开关动作push推和pull拉.那么在状态⽗类中就要有具体处理这两个动作:handlepush() handlepull(); 同时还需要⼀个获取push或pull结果的⽅法getcolor()下⾯是具体⼦类的实现:public class BlueState extends State{ public void handlepush(Context c){ //根据push⽅法"如果是blue状态的切换到green" ; c.setState(new GreenState()); } public void handlepull(Context c){ //根据pull⽅法"如果是blue状态的切换到red" ; c.setState(new RedState()); } public abstract void getcolor(){ return (Color.blue)}}同样其他状态的⼦类实现如blue⼀样.第⼆步: 要重新改写State manager 也就是本例的Context:public class Context{ private Sate state=null; //我们将原来的 Color state 改成了新建的State state; //setState是⽤来改变state的状态使⽤setState实现状态的切换 pulic void setState(State state){ this.state=state; } public void push(){ //状态的切换的细节部分,在本例中是颜⾊的变化,已经封装在⼦类的handlepush中实现,这⾥⽆需关⼼ state.handlepush(this); //因为sample要使⽤state中的⼀个切换结果,使⽤getColor() Sample sample=new Sample(state.getColor()); sample.operate(); } public void pull(){ state.handlepull(this); Sample2 sample2=new Sample2(state.getColor()); sample2.operate(); }}⾄此,我们也就实现了State的refactorying过程.以上只是相当简单的⼀个实例,在实际应⽤中,handlepush或handelpull的处理是复杂的.状态模式优点:(1)封装转换过程,也就是转换规则(2)枚举可能的状态,因此,需要事先确定状态种类。
如何设计最优化的状态机(有图版)

如何设计最优化的状态机前言:数字电路通常分为组合逻辑电路和时序电路,组合逻辑电路outputs = F(current inputs)时序电路outputs = F(current inputs,past inputs)有限状态机就是时序电路的数学抽象,一个有限状态机系统包括inputs ,outputs, states .状态机分为同步状态机(synchronous)和异步状态机(asynchronous),异步状态机由于输出信号不稳定,所以不详细讨论,对绝大多数设计来说,用的最广泛的是同步状态机。
下面主要讨论了同步状态机的设计。
一.状态机的基础知识1.1. moore状态机和mealy状态机的区别:2.1.1moore状态机输出只依赖于及其的当前状态,与输入信号无关。
这是moore状态机的优点。
下面是moore状态机的模型:moore状态机比较容易用数学的方式来分析,因此被更广泛的用在代数状态机理论中(algebraic FSM theory)。
Mealy状态机输出依赖于机器现在的状态和输入的值,如果输入改变,输出可以在一个时钟周期中将发生了改变。
其模型如下:图的说明:state memory :保存现在的状态(current state s(t) )state transistion function :根据现态和输入x(t),s(t+1)来决定下一个状态。
Output function :根据s(t)和x(t)来决定最后的输出。
Mealy 状态机通常可以有更少的状态变量,因此在工程领域有更为广阔的应用,状态变量越少,则所需的存储单元就越少。
下面用简单的实例来具体说明两者编程的区别,和综合出来的结果的不同:Mealy状态机的简单例子:1.源程序:demo_process:process(clk,reset)beginif(reset = '1')thenstate <= s0;out1 <= (others=>'0');elsif rising_edge(clk) thencase state iswhen s0 => if(in1 = '1')thenstate <= s1;out1 <= "1000";end if;when s1 => if(in1 = '0')thenstate <= s2;out1 <= "1001";end if;when s2 => if(in1 = '1')thenstate <= s3;out1 <= "1100";end if;when s3 => if(in1 = '0')thenstate <= s0;out1 <= "1111";end if;when others =>null;end case;end if;end process;modelsim仿真结果:synplify综合结果:1.模块表示图:在这张综合图上可以明显得看出红线即input所参与决定的是状态的产生和输出。
状态机的设计
• 状态:也叫状态变量。在逻辑设计中,使用状态划分逻辑顺 序和时序规律。比如设计伪随机码发生器时,可以用移位寄 存器序列作为状态;在设计电机控制电路时,可以将电机的 不同转速作为状态;在设计通信系统时,可以将信令的状态 作为状态变量等。 • 输出:输出指在某一个状态时特定发生的事件。如设计电机 控制电路时,如果电机转速过高,则输出为转速过高报警, 也可以伴随减速指令或降温措施等。 • 输入:指状态机中进入每个状态的条件,有的状态机没有输 入条件,其中的状态转移较为简单,有的状态机有输入条件, 当某个输入条件存在时才能转移到相应的状态。
Out[7] …... …... Out[0]
为什么要设计有限状态机?
组合逻辑举例之二:一个八位三态数据通路控制器 `define ON 1 ‘b 1 `define OFF 1 ‘b 0 wire LinkBusSwitch; wire [7:0] outbuf; inout [7:0] bus; assign bus = (LinkBusSwitch== `ON) ? outbuf : 8 ‘hzz always@(posedge clk) Begin … If(!linkbusswitch) Inbuf<=bus; …. End
• 状态转移图
状态转移图是状态机描述中最自然的方式,状 态转移图经常在设计规划阶段定义逻辑功能时使 用,也可以在分析已有源代码中的状态机时使用, 这种图形化的描述方式非常有助于理解设计意图。
• 状态转移列表 状态转移列表是用列表的方式描述状态机, 是数字逻辑电路常用的设计方法之一,经常被 用于状态化筒,对于可编程逻辑设计而言,由 于可用逻辑资源比较丰富,而且状态编码要考 虑设计的稳定性、安全性等因素,所以并不经 常使用状态转移列表优化状态. • HDL 语言描述状态机 如何使用HDL 语言描述状态机是本课程所要 讨论的重点,使用HDL 语言描述状态机应具有 一定的灵活性,但是决不是天马行空,而是有 章可循的.通过使用一些规范的描述方法,可以 使HDL 语言描述状态机更安全、更稳定、更高 效、更易于维护.
状态机设计

状态机设计FSM简介:FSM 分两大类:米里型和摩尔型,组成要素有输入(包括复位),状态(包括当前状态的操作),状态转移条件,状态的输出条件,图1为状态机结构图。
设计FSM 的方法和技巧多种多样,但是总结起来有两大类:第一种,将状态转移和状态的操作和判断等写到一个模块(process、block)中。
另一种是将状态转移单独写成一个模块,将状态的操作和判断等写到另一个模块中(在Verilog代码中,相当于使用两个“always” block)。
其中较好的方式是后者。
其原因如下:首先FSM 和其他设计一样,最好使用同步时序方式设计,好处不再赘述。
而状态机实现后,状态转移是用寄存器实现的,是同步时序部分。
状态的转移条件的判断是通过组合逻辑判断实现的,之所以第二种比第一种编码方式合理,就在于第二种编码将同步时序和组合逻辑分别放到不同的程序块(process,block)中实现。
这样做的好处不仅仅是便于阅读、理解、维护,更重要的是利于综合器优化代码,利于用户添加合适的时序约束条件,利于布局布线器实现设计。
图1为状态机结构图显式的FSM 描述方法可以描述任意的FSM(参考Verilog 第四版P181 有限状态机的说明)。
两个always 模块。
其中一个是时序模块,一个为组合逻辑。
时序模块设计与书上完全一致,表示状态转移,可分为同步与异步复位。
同步:always @(posedge clk)if (!reset)…………异步:always @(posedge clk or negedge reset)if (!reset)…………组合逻辑用case 语句,sensitive list 包括当然状态(current state)和输入(a,b,c…)。
编者注:以下是编者从“State Machine Coding Styles for Synthesis”一文中摘取的程序代码,是一个简单状态机的示例,采用两个always块的方法:module bm1_s (err, n_o1, o2, o3, o4,i1, i2, i3, i4, clk, rst);output err, n_o1, o2, o3, o4;input i1, i2, i3, i4, clk, rst;reg err, n_o1, o2, o3, o4;parameter [2:0] //可以在此处添加综合约束属性来限定状态机的编码:binary,one-hot,gray,etc…IDLE = 3'd0,S1 = 3'd1,S2 = 3'd2,S3 = 3'd3,ERROR = 3'd4;reg [2:0] state, next;always @(posedge clk or posedge rst)//异步复位,时序逻辑if (rst) state <= IDLE;else state <= next;always @(state or i1 or i2 or i3 or i4) begin //组合逻辑,敏感列表包含当前状态以及所有的状态机输入next = 3'bx;//设置默认值,以便防止因为if或者case语句不完整综合生成锁存器err = 0; n_o1 = 1;o2 = 0; o3 = 0; o4 = 0;case (state)IDLE: beginnext = ERROR;//如果下面所有的if条件都不符合,则对next赋该默认值if (!i1) next = IDLE;if (i1 & i2) next = S1;if (i1 & !i2 & i3) next = S2;endS1: beginnext = ERROR;if (!i2) next = S1;if (i2 & i3) next = S2;if (i2 & !i3 & i4) next = S3;n_o1 = 0;o2 = 1;endS2: beginnext = ERROR;if (i3) next = S2;if (!i3 & i4) next = S3;o2 = 1;o3 = 1;endS3: beginnext = S3;if (!i1) next = IDLE;if (i1 & i2) next = ERROR;o4 = 1;endendmodule对于状态机的输出可以通过寄存器寄存一下,消除毛刺,这将另外需要一个always 块,也就是状态机三个always块的写法。
状态机设计

CLK ,STATUS : IN STD_LOGIC;
--CLK:工作时钟; --STATUS:转换结束状态位
适用于大型设计或FPGA
有限状态机的技术优势
设计方案相对固定,结构模式简单,可定义符 号化枚举类型的状态 状态机的VHDL描述层次分明,结构清晰,易 读易懂 基于有限状态机技术设计的控制器其工作速度 大大优于CPU 基于有限状态机技术设计的控制器其可靠性也 优于CPU
一般有限状态机的设计
一般有限状态机的VHDL组成
PROCESS (state)
-- 输出由当前状态唯一决定的组合逻辑进程
BEGIN CASE state IS WHEN s0 => output <= "00"; WHEN s1 => output <= "01"; WHEN s2 => output <= "10"; WHEN s3 => output <= "11"; END CASE; END PROCESS; END rtl;
主控组合逻辑部分:任务是根据状态机外部输入的
状态控制信号(包括来自外部的和状态机内部的非进程 的信号)和当前的状态值current_state来确定下一状态 next_state的取值内容,以及对外部或对内部其他进程输 出控制信号的内容
辅助逻辑部分:辅助逻辑部分主要是用于配合状态机
的主控组合逻辑和主控时序逻辑进行工作,以完善和提 高系统的性能
WHEN s0=> IF input = '0' THEN state <= s0; ELSE state <= s1; END IF; WHEN s1=> IF input = '0' THEN state <= s1; ELSE state <= s2; END IF;
简述状态机组合逻辑设计原理

简述状态机组合逻辑设计原理
状态机组合逻辑设计原理是一种基于状态机的逻辑设计方法,它将系统的行为抽象为一组状态和状态转换,通过将状态转换与逻辑电路的输入输出关联起来,实现系统的逻辑功能。
状态机是一种描述系统行为的形式化模型,它由一组状态、转移条件和输出条件组成。
在状态机组合逻辑设计中,可以将状态表示为多个寄存器的状态向量,将状态转移条件表示为逻辑方程,将输出条件表示为逻辑函数。
设计原理包括:
1. 确定状态和状态转移:根据系统的需求和功能,确定系统的状态和状态转移条件。
状态可以根据系统的特性进行定义,例如时序逻辑中的时钟信号、使能信号等。
2. 定义输入和输出:根据系统的功能,确定输入和输出的信号,并将其与状态转移条件和输出条件关联起来。
输入信号可以作为状态转移条件的一部分,输出信号可以根据当前状态和输入信号的组合生成。
3. 设计状态转移逻辑:根据状态转移条件和输出条件,设计状态转移逻辑电路。
可以使用逻辑门、触发器等基本逻辑元件来实现状态转移逻辑。
4. 设计输出逻辑:根据输出条件和状态转移逻辑,设计输出逻辑电路。
可以使用逻辑门、触发器等基本逻辑元件来实现输出
逻辑。
5. 组合逻辑设计:将状态转移逻辑和输出逻辑组合到一起,形成完整的组合逻辑电路。
根据系统的需求和规模,可以进行优化和简化。
状态机组合逻辑设计原理的核心思想是通过状态和状态转移条件对系统行为进行建模,并将其与逻辑电路的输入输出关联起来。
通过组合逻辑设计,可以实现系统的功能需求,并优化电路的复杂度和性能。
第五讲状态机设计及其指导原则全篇

第五讲状态机设计及其指导原则1/ 38第五讲状态机设计及其指导原则1/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学第五讲状态机设计及其指导原则1 状态机是一种设计思想方法2状态机结构3状态机设计的其他技巧4状态机设计步骤第五讲状态机设计及其指导原则2/ 38第五讲状态机设计及其指导原则2/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学z 状态机是一种设计思想方法第五讲状态机设计及其指导原则3/ 38第五讲状态机设计及其指导原则3/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学原语描述module noconditional (clk,nrst,state,event);input clk,nrst input state;output event;reg event;reg [2:0] CS; //CurrentState reg[2:0] NS; //NextStateparameter [2:0] //one hot with zero idleidle = 3’b000,dorm = 3'b001,diningroom = 3'b010,classroom = 3'b100;第五讲状态机设计及其指导原则4/ 38第五讲状态机设计及其指导原则4/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学//sequential state transitionalways @ (posedge clk or negedge nrst)if (!nrst) CS <= idle; else CS <= NS; //combinational condition judgment always @ (nrst or CS)begincase (CS)idle:idle_task;NS = dorm;dorm:dorm_task;NS = diningroom;diningroom:diningroom_task;NS = classroom;classroom:classroom_task;NS = dorm;default:idle_task;NS = dorm;endcase end endmodule第五讲状态机设计及其指导原则5/ 38第五讲状态机设计及其指导原则5/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学第五讲状态机设计及其指导原则6/ 38第五讲状态机设计及其指导原则6/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学 状态机的本质--对具有逻辑顺序或时序规律事件的一种描述方法 状态机的两个应用思路:-从状态变量入手-明确电路的输出的关系第五讲状态机设计及其指导原则7/ 38第五讲状态机设计及其指导原则7/ 38制作人:梁瑞宇单位:河海大学制作人:梁瑞宇单位:河海大学对于逻辑电路而言,小到一个简单的时序逻辑,大到复杂的微处理器,都适合用状态机方法进行描述。
状态机的设计
if reset=′1′then state<=s0; elsif clk’event and clk=′1′then case state is LIBRARY ieee; when s0=>if in1=′1′then USE ieee.std logic 1164.all; state<=s1; USE ieee.std logic unsigned.all; end if; when s1=>if in1=′0′then ENTITY demo1 IS state<=s2; PORT(clk,in1,reset:IN STD LOGIC; end if; out1 :OUT when s2=>if in1=′1′then STD LOGIC vector(3 downto 0)); state<=s3; END demo1; end if; when s3=>if in1=′0′then ARCHITECTURE moore OF demo1 IS state<=s0; type state type is(s0,s1,s2,s3);———状态 状态 end if; 说明 end case; SIGNAL state : state type; end if; end process; BEGIN begin demo process:process(clk,reset)———时钟进程 时钟进程
EDA技术实用教程 EDA技术实用教程 技术
第8章 状态机的设计
状态机的设计
8.1 8.2 8.3 8.4 8.5 一般有限状态机 Moore型有限状态机的设计 型有限状态机的设计 Mealy型有限状态机的设计 型有限状态机的设计 状态编码 非法状态处理
状态机的设计
d q
寄存器C
开关S2
开关S4
开关S6
为什么要设计有限状态机?
如果能严格以时钟跳变沿为前提,按排好时序,来 操作逻辑系统中每一个开关Si,则系统中数据的流 动和处理会按同一时钟节拍有序地进行,避免了冒 险和竞争现象,时延问题就能有效地加以解决。
利用有限状态机就能产生复杂的以时钟跳变沿为前 提的同步时序逻辑,并提供操作逻辑系统的开关阵 列所需要的复杂控制时序(具有信号无锁和先后次 序等要求的)。
为什么要设计有限状态机?
有了以上电路,我们就不难设计出复杂 的控制序列来操纵系统的开关阵列。能 达到以上要求的电路就是时序和组合电 路互相结合的产物:同步有限状态机和 由状态和时钟共同控制的开关逻辑。我 们只要掌握有限状态机的基本设计方法, 加上对基本电路的掌握,再加上对数据 处理的过程的细致了解,我们就能设计 出符合要求的复杂数字逻辑系统。
LinkBusSwitc h
ZZ 开
为什么要设计有限状态机? : ControlSwitchwitch
In[6]
Q[6]
CLOCK
。 。 。 D Q[6]
带寄存器的八位数据通道控制器的verilog描述
`define ON 1 ‘b 1 `define OFF 1 ‘b 0 wire ControlSwitch; wire clock wire [7:0] out, in; always @(posedge clock) if (ControlSwith== `ON) out <= in ; else out <= out;
开关逻辑应用举例:寄存器间数据流动的控制开关
开关S1
组合逻辑
开关S2
组合逻辑
dd qq dd qq
PLC状态机编程第六篇-优化PLC程序生成
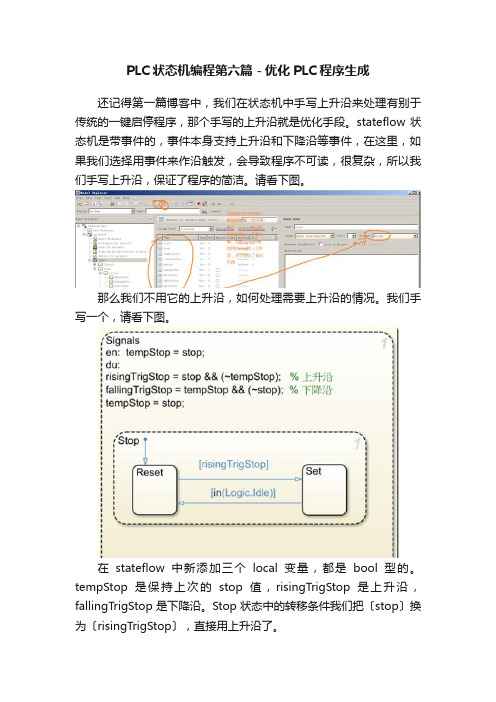
PLC状态机编程第六篇-优化PLC程序生成还记得第一篇博客中,我们在状态机中手写上升沿来处理有别于传统的一键启停程序,那个手写的上升沿就是优化手段。
stateflow状态机是带事件的,事件本身支持上升沿和下降沿等事件,在这里,如果我们选择用事件来作沿触发,会导致程序不可读,很复杂,所以我们手写上升沿,保证了程序的简洁。
请看下图。
那么我们不用它的上升沿,如何处理需要上升沿的情况。
我们手写一个,请看下图。
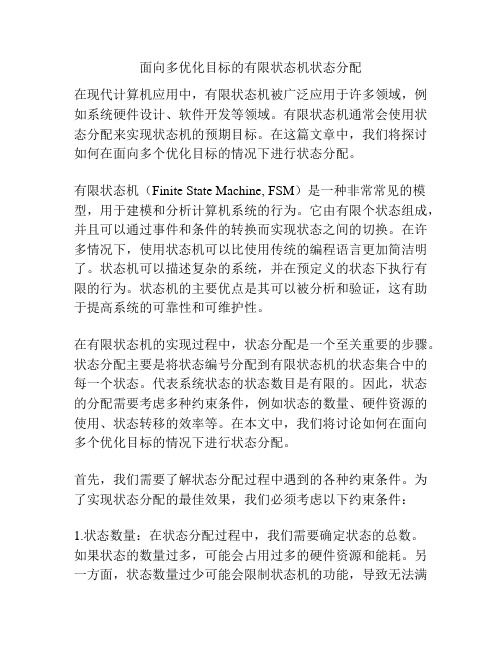
在stateflow中新添加三个local变量,都是bool型的。
tempStop是保持上次的stop值,risingTrigStop是上升沿,fallingTrigStop是下降沿。
Stop状态中的转移条件我们把〔stop〕换为〔risingTrigStop〕,直接用上升沿了。
我们知道状态机分为三种类型, Moore和Mealy状态机,还有就是他们的混合状态机。
Moore状态机就是输出只跟当前状态相关,比如当前状态是Set,那么只能在Set状态中来控制输出。
Mealy状态机呢,可以在转移条件上输出,请看下图。
这种类型的状态机生成的程序会复杂,不大好理解。
当然我们在matlab中,也不可能真正设置成Moore状态机,Moore状态机限制很大,en,du,ex等指令就无法使用,那么我们的上升沿也就无法使用。
然后继续下面的设置。
自此,我们的状态机优化完成,生成的程序和自己写的很接近,效率很高了。
但也牺牲了很多特有的功能,比如状态机的事件,不过好像事件在PLC里用途不是很大。
到现在我们把状态机介绍的差不多了,状态机中还有很多强大的功能,需要进一步学习stateflow。
面向多优化目标的有限状态机状态分配
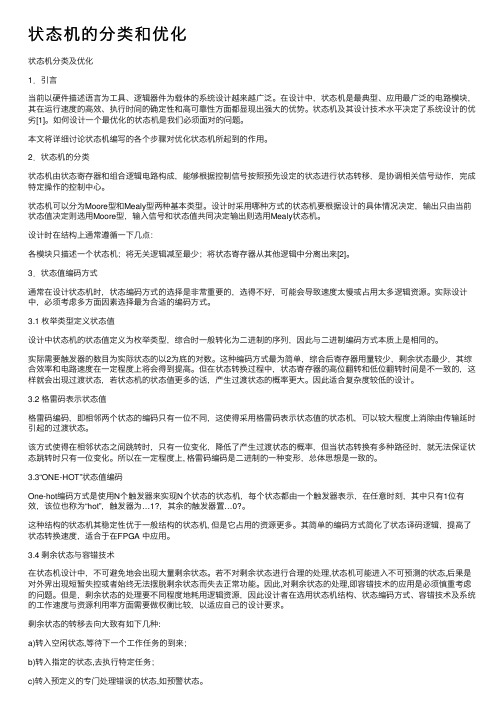
面向多优化目标的有限状态机状态分配在现代计算机应用中,有限状态机被广泛应用于许多领域,例如系统硬件设计、软件开发等领域。
有限状态机通常会使用状态分配来实现状态机的预期目标。
在这篇文章中,我们将探讨如何在面向多个优化目标的情况下进行状态分配。
有限状态机(Finite State Machine, FSM)是一种非常常见的模型,用于建模和分析计算机系统的行为。
它由有限个状态组成,并且可以通过事件和条件的转换而实现状态之间的切换。
在许多情况下,使用状态机可以比使用传统的编程语言更加简洁明了。
状态机可以描述复杂的系统,并在预定义的状态下执行有限的行为。
状态机的主要优点是其可以被分析和验证,这有助于提高系统的可靠性和可维护性。
在有限状态机的实现过程中,状态分配是一个至关重要的步骤。
状态分配主要是将状态编号分配到有限状态机的状态集合中的每一个状态。
代表系统状态的状态数目是有限的。
因此,状态的分配需要考虑多种约束条件,例如状态的数量、硬件资源的使用、状态转移的效率等。
在本文中,我们将讨论如何在面向多个优化目标的情况下进行状态分配。
首先,我们需要了解状态分配过程中遇到的各种约束条件。
为了实现状态分配的最佳效果,我们必须考虑以下约束条件:1.状态数量:在状态分配过程中,我们需要确定状态的总数。
如果状态的数量过多,可能会占用过多的硬件资源和能耗。
另一方面,状态数量过少可能会限制状态机的功能,导致无法满足预期目标。
2.状态转移的路径数量:在状态分配过程中,我们还需要考虑状态转移路径的数量。
状态转移路径的数量会影响整个系统的执行速度和效率。
因此,如果状态机的状态转移路径数量过多,则可能会导致系统性能下降。
3.状态分配的可行性:状态分配的可行性指的是我们是否可以实现分配的状态。
在实践中,一些状态分配可能会限制可用的资源。
因此,如果我们不能实现特定的状态分配,则我们可能需要重新考虑其他状态分配,以实现所需的系统功能。
4.状态的复杂性:状态的复杂性是指状态机实现过程中所使用的硬件资源和能耗的复杂性。
《2024年状态轮询和事件驱动的软件状态机设计优化》范文

《状态轮询和事件驱动的软件状态机设计优化》篇一状态轮询与事件驱动的软件状态机设计优化一、引言在软件开发中,状态机设计是一种重要的编程模式,它能够有效地处理系统在不同状态之间的转换。
状态轮询和事件驱动是两种常见的状态机实现方式。
状态轮询通过定期检查系统状态来更新状态机,而事件驱动则依赖于外部事件来触发状态转换。
本文将探讨这两种方法的优缺点,并提出一种优化的软件状态机设计方法。
二、状态轮询的设计与挑战状态轮询是一种主动式的状态机实现方式,它通过定期检查系统状态来更新状态机。
这种方法的优点在于能够实时地反映系统状态,但在高并发或实时性要求较高的场景中,状态轮询可能导致不必要的资源浪费和性能损耗。
此外,状态轮询的实现在一定程度上增加了系统的复杂度,需要开发者对系统状态进行精细的管理。
三、事件驱动的设计与优势事件驱动是一种被动式的状态机实现方式,它依赖于外部事件来触发状态转换。
相比状态轮询,事件驱动具有更高的灵活性和响应速度。
由于只在事件发生时才进行状态转换,因此可以降低系统的资源消耗和复杂性。
此外,事件驱动还能够帮助开发者更好地把握系统的行为,提高代码的可读性和可维护性。
四、优化的软件状态机设计为了充分发挥状态轮询和事件驱动的优点,我们可以采用一种混合的设计方法。
在这种设计中,我们将系统状态分为两种类型:周期性检查的状态和事件驱动的状态。
对于周期性检查的状态,我们采用状态轮询的方式,但可以通过设置合理的轮询间隔来降低资源消耗。
对于事件驱动的状态,我们则采用事件驱动的方式,通过监听外部事件来触发状态转换。
在具体实现上,我们可以引入一个状态机管理器来统一管理系统的状态。
状态机管理器负责维护系统的当前状态、状态转换逻辑以及与外部事件的交互。
通过将系统的状态和转换逻辑交给状态机管理器来管理,我们可以降低系统的复杂度,提高代码的可读性和可维护性。
此外,我们还可以采用一些优化策略来进一步提高软件状态机的性能。
例如,我们可以利用缓存技术来存储常用数据,以减少数据访问的延迟。
状态机的分类和优化
状态机的分类和优化状态机分类及优化1.引⾔当前以硬件描述语⾔为⼯具、逻辑器件为载体的系统设计越来越⼴泛。
在设计中,状态机是最典型、应⽤最⼴泛的电路模块,其在运⾏速度的⾼效、执⾏时间的确定性和⾼可靠性⽅⾯都显现出强⼤的优势。
状态机及其设计技术⽔平决定了系统设计的优劣[1]。
如何设计⼀个最优化的状态机是我们必须⾯对的问题。
本⽂将详细讨论状态机编写的各个步骤对优化状态机所起到的作⽤。
2.状态机的分类状态机由状态寄存器和组合逻辑电路构成,能够根据控制信号按照预先设定的状态进⾏状态转移,是协调相关信号动作,完成特定操作的控制中⼼。
状态机可以分为Moore型和Mealy型两种基本类型。
设计时采⽤哪种⽅式的状态机要根据设计的具体情况决定,输出只由当前状态值决定则选⽤Moore型,输⼊信号和状态值共同决定输出则选⽤Mealy状态机。
设计时在结构上通常遵循⼀下⼏点:各模块只描述⼀个状态机;将⽆关逻辑减⾄最少;将状态寄存器从其他逻辑中分离出来[2]。
3.状态值编码⽅式通常在设计状态机时,状态编码⽅式的选择是⾮常重要的,选得不好,可能会导致速度太慢或占⽤太多逻辑资源。
实际设计中,必须考虑多⽅⾯因素选择最为合适的编码⽅式。
3.1 枚举类型定义状态值设计中状态机的状态值定义为枚举类型,综合时⼀般转化为⼆进制的序列,因此与⼆进制编码⽅式本质上是相同的。
实际需要触发器的数⽬为实际状态的以2为底的对数。
这种编码⽅式最为简单,综合后寄存器⽤量较少,剩余状态最少,其综合效率和电路速度在⼀定程度上将会得到提⾼。
但在状态转换过程中,状态寄存器的⾼位翻转和低位翻转时间是不⼀致的,这样就会出现过渡状态,若状态机的状态值更多的话,产⽣过渡状态的概率更⼤。
因此适合复杂度较低的设计。
3.2 格雷码表⽰状态值格雷码编码,即相邻两个状态的编码只有⼀位不同,这使得采⽤格雷码表⽰状态值的状态机,可以较⼤程度上消除由传输延时引起的过渡状态。
该⽅式使得在相邻状态之间跳转时,只有⼀位变化,降低了产⽣过渡状态的概率,但当状态转换有多种路径时,就⽆法保证状态跳转时只有⼀位变化。
第6章状态机设计

library IEEE; use IEEE.std_logic_1164.all; --use IEEE.std_logic_arith.all; --use IEEE.std_logic_unsigned.all; entity counter13 is port(cp:in std_logic; reset:in std_logic; q:out std_logic_vector(3 downto 0); op:out std_logic); end counter13; architecture rt1 of counter13 is type state is(s0,s1,s2,s3,s4,s5,s6,s7,s8,s9,s10,s11,s12); signal presentstate,nextstate:state; signal qn:std_logic_vector(3 downto 0); begin switchtonextstate:process(cp) begin if reset=‘1’ then q<=0; presentstate<=s0; elsif cp'event and cp='1' then presentstate<=nextstate; end if; end process switchtonextstate;
CLK
QB CLK QC
d1 d2 d3
EN
EN QD countA
0
计数加1
四位二进制同步计数器电路图
四位二进制同步计数器真值表
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all;----由ste_logic_vector转换成integer; entity countA is port(clk,clr,en: in std_logic; QA,QB,QC,QD:out std_logic); end countA; architecture exampleA of countA is signal count_4:std_logic_vector(3 downto 0); begin QA<=count_4(0); QB<=count_4(1); QC<=count_4(2); QD<=count_4(3); process(clk,clr) begin if(clr='1')then count_4<="0000"; elsif (clk'event and clk='1')then if (en='1')then if(count_4="1111")then count_4<="0000"; else count_4 <=count_4+1; end if; end if; end if; end process; end exampleA;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如何设计最优化的状态机前言:数字电路通常分为组合逻辑电路和时序电路,组合逻辑电路outputs = F(current inputs)时序电路outputs = F(current inputs,past inputs)有限状态机就是时序电路的数学抽象,一个有限状态机系统包括inputs ,outputs, states .状态机分为同步状态机(synchronous)和异步状态机(asynchronous),异步状态机由于输出信号不稳定,所以不详细讨论,对绝大多数设计来说,用的最广泛的是同步状态机。
下面主要讨论了同步状态机的设计。
一.状态机的基础知识1.1. moore状态机和mealy状态机的区别:2.1.1moore状态机输出只依赖于及其的当前状态,与输入信号无关。
这是moore状态机的优点。
下面是moore状态机的模型:moore状态机比较容易用数学的方式来分析,因此被更广泛的用在代数状态机理论中(algebraic FSM theory)。
Mealy状态机输出依赖于机器现在的状态和输入的值,如果输入改变,输出可以在一个时钟周期中将发生了改变。
其模型如下:图的说明:state memory :保存现在的状态(current state s(t) )state transistion function :根据现态和输入x(t),s(t+1)来决定下一个状态。
Output function :根据s(t)和x(t)来决定最后的输出。
Mealy 状态机通常可以有更少的状态变量,因此在工程领域有更为广阔的应用,状态变量越少,则所需的存储单元就越少。
下面用简单的实例来具体说明两者编程的区别,和综合出来的结果的不同:Mealy状态机的简单例子:1.源程序:demo_process:process(clk,reset)beginif(reset = '1')thenstate <= s0;out1 <= (others=>'0');elsif rising_edge(clk) thencase state iswhen s0 => if(in1 = '1')thenstate <= s1;out1 <= "1000";end if;when s1 => if(in1 = '0')thenstate <= s2;out1 <= "1001";end if;when s2 => if(in1 = '1')thenstate <= s3;out1 <= "1100";end if;when s3 => if(in1 = '0')thenstate <= s0;out1 <= "1111";end if;when others =>null;end case;end if;end process;modelsim仿真结果:synplify综合结果:1.模块表示图:在这张综合图上可以明显得看出红线即input所参与决定的是状态的产生和输出。
而且输出out1为了防止输出的波形不好(因为通过组合电路输出的波形不稳定),所以加了一个触发器。
2.门级综合结果(仅作参考):其中状态机模块编码采用两个触发器,见下图:所以如果在语言中没有对状态进行编码,那么综合器会自动将编码方式设为顺序编码。
Moore状态机的简单例子:1源程序:demo_process:process(clk,reset)beginif(reset = '1')thenstate <= s0;out1 <= (others=>'0');elsif rising_edge(clk) thencase state iswhen s0 => if(in1 = '1')thenstate <= s1;end if;out1 <= "1000";when s1 => if(in1 = '0')thenstate <= s2;end if;out1 <= "1001";when s2 => if(in1 = '1')thenstate <= s3;end if;out1 <= "1100";when s3 => if(in1 = '0')thenstate <= s0;end if;out1 <= "1111";when others =>null;end case;end if;end process;2.Modelsim仿真结果:3.ynplfy综合结果:1.原理图模块:从图中可以看出红线即输入仅仅参与决定了状态机产生状态。
2.门级综合结果:(仅作参考)从以上两种状态机的例子可以看出,同一周期对同样的输入,两种仿真结果一致,只是在综合上有所区别。
1.2 创建状态图或者状态转换表。
设计者通常可以用两种工具来简化状态表的建立过程:状态图和转换表。
状态图提供了一种图形化的,易理解的对FSM操作的描述,但限制于相对较小的设计,当设计太复杂而无法创建状态图时,应使用转换表。
2.2.1 创建状态图状态图应该从复位状态开始,每一个圈表示一个状态,状态图是有向图,圈内部应标上状态的名称和此状态的输出赋值,两个状态之间的转变通过一个有向线段表示,转变条件应标志在有向线段上面,该条件与时钟的上升沿同步。
下面是一个简单的图例:1.2.2 创建转换表状态图是帮助理解状态之间关系的有效一种方法,然而对于许多状态的大电路,状态会变得凌乱,极难画出可用的形式。
这时,普遍采用一种称作转换表的文本描述方式,创建转换表的方法与状态图相同,不同的是转换列在一个表中。
注意:在写状态图或者转换表的时候要坚持互斥原则,离开任何节点的线段上的逻辑表达式必须成对互斥,即没有在离开同一节点不同线段上的两个表达式同时为真的情况,如果两个这样的表达式同时是逻辑1,那么状态机就进入了两个不同的次状态,这是不容许的。
互斥测试的是离开同一节点的两个表达式的逻辑and必须为逻辑0。
1.4 状态的编码方式在vhdl原码中是否对状态机编码作出规定并不影响状态机的功能,综合工具提供状态优化器,他可以在综合过程中确定状态编码。
状态编码主要有5种编码方式:1.顺序编码。
2.格雷码编码。
3.单热编码(one-hot)。
4.随机编码。
5.自动编码(面积最小化)。
状态机在传统上是按二进制编码的。
然而采用Gray编码,相邻状态可减少瞬变的次数。
有时不可能在所有状态中使用Gray编码,则应在状态矢量中增加触发器的数量以减少开关的次数。
另一种方法是使用one-hot编码,虽然该编码使用的触发器较多,即可减少组合逻辑的使用,在带多个输出且每个输出是几个状态的函数的状态机中更是如此。
根据状态机的形式,设计者可在Gray、One-hot或二进制间进行选择。
现在就详细说一下one-hot 状态机:1.ne-hot编码:s0 = “0001” ; s1 = “0010”; s2 = “0100”; s3 = “1000”;每一个状态用掉一个触发器,状态数等于触发器的数目。
这就意味着触发器数目增加,而状态译码组合电路被优化掉了。
对于寄存器资源丰富的xilinx器件来说,是非常适合的。
2.one-hot 状态机的好处:现在的FPGA每一个逻辑块中都包含了一个和多个触发器,对于仅需要触发器的one-hot编码解码来说,提供了很好的条件。
下面列举了一些用one-hot 设计的好处:a)对寄存器资源丰富xilinx fpga 来说更易于适配和布线。
b)one-hot状态机是典型的相当快速的状态机。
他的速度与状态的个数没有任何关系,仅仅决定于状态变迁到一个特殊状态的这种转换的数量(instead depend only on thenumber of transitions into a particular state)。
c)不用担心你会在发现最佳的状态机编码方式。
因为其他设计的状态机如果在加入一些状态或者改变其他一些什么的话,那就可能不再最优了。
One-hot 编码方式在所有状态机中是最佳的,最优的。
d)one-hot 状态机很容易设计。
状态图能够直接被画成原理图或者被直接用vhdl语言写出来,而不用编码成状态表。
e)修改起来简单明了。
增加和删掉一些状态或者改变一些敏感量等式能被综合器很容易的执行,而不会影响余下的状态机。
f)很容易从vhdl 或者verilog 综合。
g)比其他一些高性能的状态机没有任何的布线面积的浪费。
h)能够用静态时序分析的方法很容易的找出危险的不合理的状态机转换路径。
3.举例说明:type STATE_TYPE is (s0, s1, s2, s3);attribute ENUM_ENCODING: STRING;attribute ENUM_ENCODING of STATE_TYPE: type is "0001 0010 0100 1000"; signal CS, NS: STATE_TYPE;begin-- build the state flopsSYNC_PROC: process (clk, reset)beginif (reset='1') thenCS <= s0;elsif rising_edge(clk) thenCS <= NS;end if;end process;-- state machineCOMB_PROC: process (CS,in1)begincase CS iswhen s0 =>out1 <= (others=>'0');if(in1 = '1')thenNS <= s1;out1 <= "1000";end if ;when s1 => if(in1 = '0')thenNS <= s2;out1 <= "1001";end if;when s2 => if(in1 = '1')thenNS <= s3;out1 <= "1100";end if;when s3 => if(in1 = '0')thenNS <= s0;out1 <= "1111";end if;when others =>null;end case;end process;在s0状态里,有一个细节,out1 <= (others=>'0');这句话在if外面,和在if里面的out1 <= "1000";这句话不会自相矛盾。