LS6 EPSON机械手手册
EPSON LS系列机械手机械原点校准

13
结束
谢谢
14
LS3-401S
LS3-401C
LS6-601S
LS6-602C
6
一、LS系列机械原点调整
1.5 第四轴原点位置,将第二轴前端三角与Z轴平面中心对齐
7
二、原点校准
2.1 先将机械手按照上一节所叙将各轴移动到机械原点处,使机械手呈现如下 姿态,并保持此姿态不变
8
二、原点校准
2.2 打开EPSON软件,连接控制器,先在“工具” “机器人管理器” “控制面板”里将 Motor Off。然后在“工具” “命令窗口” 或单击工具图标“ ”进入命令输入状态。然后在命令窗口输入如下指令 后按回车,复位编码器脉冲值 Encreset 1,2,3,4
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4) 4.3 执行完精确校准后,将机械手以右手姿势保存当前点到P2并保存,然后手动将机械 手姿势切换到左手姿势(如果机械手运动范围内可以自动切换姿势可以不用手动切换 姿势,如果有障碍时一定要切换姿势,否则切换姿势时可能会撞到其他设备),然后 再执行以下指令以左手姿势移动到P2点,看机械手末端是否与十字叉重合,如果重 合说明左右手校准成功,如果不重合说明校准有问题重新示教P1、P2点再次校准。 Jump P2 /L
10
三、单独一个轴原点校准
2.5 校准完成后,先将机械手第1轴移动一个位置,然后输入如下指令看第1轴 能否回到原点位置,如不能回到原点位置请重新校准第1轴 Pulse 0,ppls(here,2),ppls(here,3),ppls(here,4) 同理2、3、4轴可以按照以上方法校准 (2、3、4轴可以同时校准,校准过程 要注意将机械手移动到一个第1、2关节可以打直的位置,否则有撞机风险)
Epson产品用户手册说明书

Read these instructions before using your product.Important Safety Instructions: When using telephone equipment, youshould always follow basic safety precautions to reduce the risk of fire, electric shock, and personal injury, including the following:• D o not use this Epson ® product near water.• A lways keep this guide handy.• A void using a telephone during an electrical storm. There may be a remote risk of electric shock from lightning.• D o not use a telephone to report a gas leak in the vicinity of the leak.Caution: To reduce the risk of fire, use only a No. 26 AWG or largertelecommunication line cord.1 Remove all protective materials from the product.2 L ift up the scanner unit and remove all protective materialsfrom inside the product, then close the scanner unit.6 Close the ink pack tray cover and lock it.7 P ress OK on the LCD screen to start charging the ink.Ink charging takes approximately 5 minutes. A messageappears when ink charging is complete.4 Load paperFor instructions on loading envelopes or legal-size paper, or using the rear paper feed slot, see the online User’s Guide .1 M ake sure the product is done charging the ink, then pullout the paper cassette.2 S lide the side edge guides all the way out and set thefront edge guide to the paper size you are using.3 I nsert paper with the glossy or printable side down.Standard paper: Thick paper:Note: Make sure the paper is under the arrow mark for your paper type and loaded against the front edge of the cassette.4 S lide the edge guides against the paper, but not tootightly.2 P ress an ink pack tray to release it, then pull the tray out.3 S hake an ink pack 10 times, then remove it from thepackaging.Note: Do not touch the green chip on the ink pack.4 M ove the handle forward, place the ink pack into the inkpack tray until it clicks, then move the handle back to itsoriginal position .Note: Make sure the ink pack is fullyinserted and level with the top of the ink pack tray.5 I nsert the ink pack tray into the printer. Repeat steps 2 to5 for the other ink packs.Note: The ink packs are keyed to fit into the correct color slot.If you cannot insert the ink pack tray all the way, do not force it. Make sure the ink pack color matches the color slot on the printer.3 F ollow the instructions on the computer screen to run thesetup program.4 W hen you see the Select Your Connection screen, selectone of the following and follow the on-screen instructions:• Wireless connectionIn most cases, the software installer automatically attempts to set up your wireless connection. If setup is unsuccessful, you may need to enter your network name (SSID) and password.• Direct USB connectionMake sure you have a USB cable (not included).• Wired network connectionMake sure you have an Ethernet cable (not included).PCL or PostScript driver (WF-C5790)Download the software and see your online User’s Guide for instructions..jm/support/wfc5790Mobile printingConnect wirelessly from your smartphone, tablet, or computer.Print documents and photos from across the room or around the world:• Print directly from your iOS device. Simply connect your printer and device to the same network and tap the action icon to select the print option.• Use Epson Print Enabler (free from Google Play™) with Android™ devices (v4.4 or later). Then connect your printer and device to the same network and tap the menu icon to select the print option.• Print remotely with Epson Connect™ and Google Cloud Print™. See your online User’s Guide for instructions or learn more at .jm/connect .Any problems?Network setup was unsuccessful.• Make sure you select the right network name (SSID).• Restart your router (turn it off and then on), then try toconnect to it again.• The printer can only connect to a network that supports 2.4 GHz connections. If your router offers both 2.4 GHz and 5 GHz connections, make sure 2.4 GHz is enabled.• If you see a firewall alert message, click Unblock or Allow to let setup continue.• If your network has security enabled, make sure you enter your network password (WEP key or WPA passphrase) correctly. Be sure to enter your password in the correct case.56 S elect the paper settings on the product’s control panel.12 I f prompted, press Proceed on the LCD screen to set upthe fax, or press Close to set it up later.Note: If your computer does not have a CD/DVD drive or you are using a Mac, an Internet connection is required to obtain the product software.To print from a Chromebook™, go to.jm/support/gcp for instructions.Standard software package1M ake sure the product is NOT CONNECTED to your computer.Windows ®: If you see a Found New Hardware screen, click Cancel and disconnect the USB cable.2 I nsert the product CD or download and run your product’ssoftware package. For the latest software, visit:WF-C5710.jm/support/wfc5710WF-C5790.jm/support/wfc5790。
LS6 EPSON机械手手册

标签
控制器
软件
RC90
EPSON RC+ 7.0
LS3-401* EPSON RC+ 7.0
7.0.1版或更早版本 7.0.2版或更新版本
RC90控制器固件 7.0.2.0版或更新版本
!!! OK
OK: 可连接 可使用EPSON RC+ 7.0与控制器具备的所有功能。
!!!: 可连接 虽然可连接,但推荐使用EPSON RC+ 7.0版本7.0.2或更新版本。
Epson Deutschland GmbH Factory Automation Division Otto-Hahn-Str.4 D-40670 Meerbusch Germany TEL : +49-(0)-2159-538-1391 FAX : +49-(0)-2159-538-3170 E-MAIL : s@epson.de
1.2.1 滚珠丝杠花键的强度 ....................................................................... 5 1.3 操作注意事项.............................................................................................. 6 1.4 紧急停止 ..................................................................................................... 8
1.1 关于正文中的符号 ...................................................................................... 3 1.2 设计与安装注意事项................................................................................... 4
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作
1、 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
EPSON机械手软件操作指南
一、连接控制器
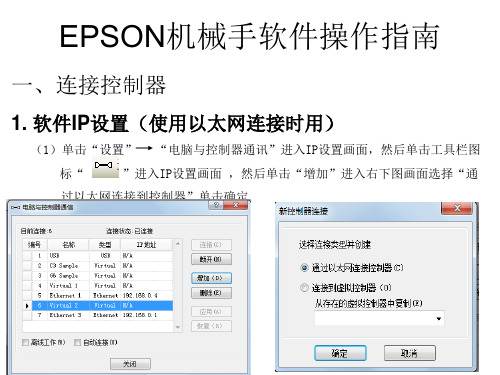
1. 软件IP设置(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,然后单击工具栏图
标“
”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
四、RC+5.4.3软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
机械手说明书 (1)

2)本机械手的保养、维护、检修等工作,必须由受过专业培训的技术人员来承担;
3)无关人员进入机械手工作范围,应告知安全人员并了解应注意的安全要求;
4)没有征得制造商的同意,任何试图改变机械手原始设计的应用范围以及其它改装行为都是被禁止的;
二.安装与搬运
1.安装尺寸
2.包装尺寸
3.拆箱后搬运
注意!
搬运过程中禁止人员在机械手下方作业
注意!
假如机械手需要重新安装或者移动,请告知代理商或者制造商.
注意!
机械手在出厂前已确认完好状态,请在运输及拆箱过程中务必小心谨慎,
如果发现有因运输过失造成损伤,请立即告知运输公司,封存受损件以备检查,
并申请赔偿.
21
A00A090
耐磨垫
2
9
A00PSI12E
关节轴承
1
20
A00P81240
圆螺母
1
8
A00A080
定位柱
1
19
A00P85840
止退平垫
1
7
A00A070
旋出角度调整轴
1
18
A00P6008
滚珠轴承
2
6
A00A060
气缸旋转轴
1
17
A00PT81212
圆螺母
1
5
A00A050
拱旋转轴
1
16
A00PT85812
1
9
A00P15SL
手臂滑轨
1
18
A00PAS06
速度控制阀
2
8
A00C090
护管固定架
Ls6操作手册21P

经典PPT模版 欢迎下载
应用条件
小器官 保存 甲状腺 小器官 重设置 乳腺 肌骨 阴囊 保存 重设置 儿童腹部 儿童髋关节
儿科
新生儿头颅 新生儿 腹部
经典PPT模版 欢迎下载
二维模式菜单
空间复合 斑点噪音抑制 编码激励 等级调节 抑制 伪彩 穿刺引导 B模式柔滑 抑制 焦点间距离 近场聚焦 B模式偏转 凸型扩展 帧频均 旋转 线密度 边缘增强 灰阶图 频率调节 困难病人
经典PPT模版 欢迎下载
图例说明
显示激活应用条件组 明亮显示激活探头 未激活探头 无探头插入连接 选择预设条件 进入键 三角符号表示下拉菜 单可进行多项选择 左右翻页键
灰暗表示此项 功能不能使用
用户自定义条件
未激活应用条件 显示激活的应用条件 此符号表示 通过旋钮调节
左右三角 可调整参数 显示多列图谱 可任意选择 功能开关键
经典PPT模版 欢迎下载
频谱模式菜单
自动测量参数 双同步/三同步 轨迹敏感度 抑 制 全屏显示频谱 包络方向 快速角度偏转 自动计算开关 显示格式 翻 转 取样容积大小 心动周期平均 动态范围 频率调节 包络方向 PW/ CF比率 灰阶图 翻 转 时间分辨率 频谱平均 扫描速度 伪彩
输出功率
角度校正
18 / GE Title or job number / 2015/7/29
经典PPT模版 欢迎下载
四维操作步骤
换到4D3C-L探头 ---先打好矢状面---按3D/4D键 ---在 触摸屏上右上角Mode中选择4D ---- 在触摸屏右上角 preset中选择模式:1.Surface (表面模式,主要观察面 部、小手脚等) 3.Skeleton (骨骼模式,主要观察脊柱)--将绿线放在羊水里接近面部---根据菱形的位置来选择 触摸屏上3D orient:0度/180度---非标准矢状面时(即 有冠状面显示)调X轴---额头过髙或过低调Z轴---额头 过里或过外调Y轴---动一下轨迹球使面部接近绿线---按 冻结键---点液晶屏上的tile:singe即单幅
爱普生RC90(LS3、LS6)培训

11
RC90普通I/O时序图
4、安全门输入时序图
12
RC90普通I/O扩展板引脚定义
1、I/O扩展板输入输出定义及设置
13
RC90普通I/O扩展板引脚定义
2、1号I/O扩展引脚定义
14
RC90安全I/O定义
不外接急停时可以将安全I/O按如下方式接线:1,2,3,7,9,18,20短接 8,19,21,25短接 接 10,14,15,16短接
2.1 Go 指令
功能:全轴同时的PTP动作,动作的轨迹是各关节分别对从当前的点到目标坐标进行插补。 格式:Go 目标坐标 示例: 1. Go P1 ´机械手动作到P1点 2. Go XY(50, 400, 0, 0) ´机械手动作到X=50,Y=400,Z=0,U=0 3. Go P1+X(50) ´机械手动作到P1点X坐标值偏移量为+50的位置 4. Go P1:X(50) ´机械手动作到P1点对应X坐标值为50的位置
器的前三位相同,例如“192.168.0.10”
19
四、RC+5.4.3软件操作
2.控制器设置
(1)单击“设置” 设置控制的IP地址及控制方式,当要使用外部I/O控制时须将“Control Device”
“控制器”进入控制器设置画面,然后单击“configuration”
远程I/O,然后单击“Apply”,再单击关闭,等待控制器重启完毕后,按“F5”, 单击“激活远程I/O”后关闭软件即可使用外部I/O控制控制器
刹车释放 运行功率设置
马达报警时 重置马达
27
四、RC+5.4.3软件操作
6. 工具坐标设置
工具 →机器人管理器→工具或单击工具栏 图示 图标后,选择“工具”页面。如下
六轴机器人操作手册

V A L I R O B O T六轴机器人使用手册客户:版本:1.0版日期:2013-1-1瓦力智能科技V a l i I n t e l l i g e n t T e c h n o l o g yC o r p o r a t i o n操作前,请注意安全。
确认人员与周边设备都在工作范围外。
内容若有错误,请以原厂操作说明书为准!目录第一章安全 (1)1.1 保障安全 (1)1.2 专门培训 (3)1.3 操作人员安全注意事项 (3)1.4 机器人的安全注意事项 (5)1.5 移动及转让机器人的注意事项 (7)1.6 废弃机器人的注意事项 (7)第二章机器人菜单详解 (8)2.1 六轴机器人系统介绍 (8)2.2 系统运行环境 (9)2.3 程序菜单介绍 (9)2.4 数据菜单介绍 (11)2.5 机器人菜单介绍 (12)2.6 显示菜单介绍 (14)第三章手动操作机器人 (17)第四章机器人编程教导 (26)4.1 建立新程序 (26)4.2 常用编程指令介绍 (30)第五章机器人的保养 (42)5.1 机械手的保养 (42)5.2 控制柜的保养 (43)第一章安全安全在生产中是最重要的,无论是自身的安全,还是他人及设备的安全都很重要,所以在这里我们把安全放在首位首先我们来介绍一下在生产操作中应注意哪些安全问题,应该怎么解决。
1.1 保障安全机器人与其他机械设备的要求通常不同, 如它的大运动范围、快速的操作、手臂的快速运动等,这些都会造成安全隐患。
阅读和理解使用说明书及相关的文件,并遵循各种规程,以免造成人身伤害或设备事故。
用户有责任保证其安全的操作环境符合和遵守地方及国家有关安全性的法令、法规及条例。
上图为安全注意事项:危险,误操作时有危险可能发生死亡或重伤害事故。
注意,可能发生中等伤害或轻伤事故。
强制,必须遵守的事项。
禁止,禁止的事项。
1.2 专门培训• 示教和维护机器人的人员必须事先经过培训。
爱普生工业机器人EPSON 6轴机器人

点数据是由机器人坐标系为基准的工具坐标系 中心位置及姿势所表示的,即位置用位置数据 (X、Y、Z),姿势用姿势数据(U、V、W)指 定: P100=XY(X,Y,Z,U,V,W) U:绕Z轴旋转 V:绕Y轴旋转
W:绕X轴旋转
在调试点位时,默认模式下以机器人坐标系为 准;工具模式下以工具坐标系为准。
AvoidSingularity(Move,Arc)自动回避特别姿势功能
AvoidSingularity=1
6轴机器人工具坐标系向导设置步骤
U = 0, V = 0, W = 180
旋转U轴一些角度(一般180度) U = 0, V = 0, W = 180。旋转W一些角度,同时保持U和 V=0。
Jump3 Here :Z(100), P0 :Z(100), P0
Jump3 Here -TLZ(100), P0 -TLZ(100), P0
Jump3 Here +Z(100), P0 +Z(100), P0
Go p0 Move p0
Go XY(x0,y0,z,u,v,w)/R /A /NF /J6F0 /J4F0 /0 如果点位是自定义的,例如由视觉像素坐标转换而来,则需要指定 各个姿势的标志。一般可以先手动到目标点位置记录下各个标志,然后再 加到后面。 AutoLJM(Jump3,Go,Move,Arc)最小的动作关节移动量 Go P0 LJM
EPSON 6轴机械手培训
6轴机器人坐标系
1.机器人基本坐标系:以J1 法兰中心为原点, XYZ正方向如下图(右手 定则); 2.工具0坐标系:以J6法兰 中心为原点, XYZ正方向如下图,(右 手定则)。
机器人坐标系一般是固定不变的
Ls系列基本手册

■ 清洁机械手时,请勿用酒精或苯等用力擦拭。否则可能会导致涂装面光泽度降低。
注意
LS Rev.4
23
基本篇 3. 环境与设置
3.2 台架
请客户自行制作用于固定机械手的台架。台架的形状与大小因机器人系统的用途 而异。作为台架设计时的参考,下面列出了机械手所要求的条件。
洁净度 :等级 ISO 4 (ISO14644-1)
排气 :排气口尺寸 :内径ø12mm / 外径ø16mm
适用排气管 :聚氨酯管
外径ø12mm(内径ø8mm)或内径ø16mm 建议排气量:1000cm3/s(标准状态)左右
*4:如下所示为测量时的条件。
机械手的动作条件 :额定负载、4关节同时动作、最大速度、最大加速度、占空比50%
通过高速动作以缩短节拍时间 通过重新评估最高速度,缩短长距离移动时的节拍时间(LS3) 通过“适合可搬运重量的最佳加减速度”与“精准定位停止技术”实现的灵巧动 作也缩短了节拍时间
10
LS Rev.4
基本篇 2. 规格
2.2 型号名称
LS3-40 1 S
环境
S :标准 C :洁净
第3关节行程
:150 mm :标准环境规格 1 :120 mm :洁净环境规格(带伸缩罩)
如果在温度与湿度变化较大的环境中使用,机械手内部可能会结露。
直接搬运食品时,需要确认机械手有无导致食品污损的可能性。请与销售商协商。
警告
不能在酸或碱等腐蚀性环境中使用。另外,在盐分等易生锈的环境中使用可能会 导致主体生锈。
■ 请务必在控制器的电源上使用漏电断路器。如果未使用漏电断路器,则可能会因漏 水而导致触电或故障。 漏电断路器的选型因控制器而异。详情请参阅控制器手册。
Epson LS6-B SCARA机器人说明书
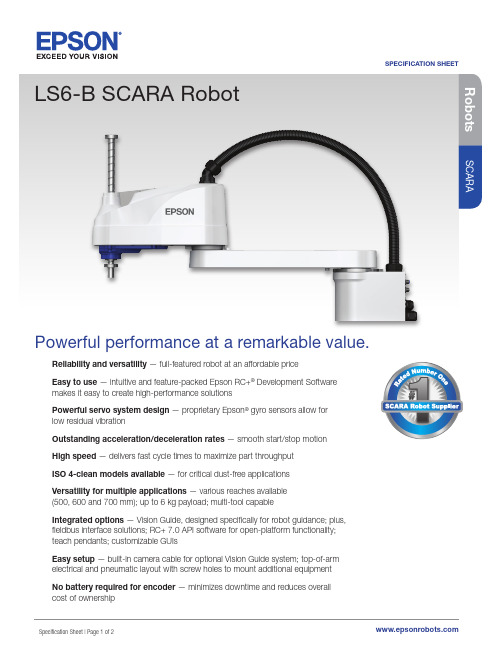
SPECIFICATION SHEETRobotsSCARASpecification Sheet | Page 1 of 2LS6-B SCARA RobotPowerful performance at a remarkable value.Reliability and versatility — full-featured robot at an affordable priceEasy to use — intuitive and feature-packed Epson RC+® Development Software makes it easy to create high-performance solutionsPowerful servo system design — proprietary Epson ® gyro sensors allow for low residual vibrationOutstanding acceleration/deceleration rates — smooth start/stop motion High speed — delivers fast cycle times to maximize part throughput ISO 4-clean models available — for critical dust-free applications Versatility for multiple applications — various reaches available (500, 600 and 700 mm); up to 6 kg payload; multi-tool capableIntegrated options — Vision Guide, designed specifically for robot guidance; plus, fieldbus interface solutions; RC+ 7.0 API software for open-platform functionality; teach pendants; customizable GUIsEasy setup — built-in camera cable for optional Vision Guide system; top-of-arm electrical and pneumatic layout with screw holes to mount additional equipment No battery required for encoder — minimizes downtime and reduces overallcost of ownershipSpecification Sheet | Page 2 of 2Specifications and terms are subject to change without notice. EPSON and Epson RC+ are registered trademarks, EPSON Exceed Your Vision is a registered logomark and Better Products for a Better Future are trademarks of Seiko EpsonCorporation. SmartWay is a registered trademark of the U.S. Environmental Protection Agency. All other product and brand names are trademarks and/or registered trademarks of their respective companies. Epson disclaims any and all rights in these marks. Copyright 2019 Epson America, Inc. Com-SS-Oct-13 CPD-57403 9/19Epson America, Inc.3840 Kilroy Airport Way, Long Beach, CA 90806Epson Canada Limited 185 Renfrew Drive, Markham, Ontario L3R 6G3 www.epson.caContact:1 Cycle time based on round-trip arch motion (300mm horizontal, 25mm vertical) with2 kg payload (path coordinates optimized for maximum speed).See the latest innovations from Epson Business Solutions at /forbusiness。
EPSON机器人产品说明书
EPSON RC+ 7.0 SPEL +语言参考Rev.4 C1M218S4861FVer.7.5EPSON RC+ 7.0 (Ver.7.5) SPEL+语言参考Rev.4EPSON RC+ 7.0 (Ver.7.5)SPEL+语言参考Rev.4Copyright 2012-2021 SEIKO EPSON CORPORATION. All rights reserved. EPSON RC+ 7.0 (Ver.7.5) SPEL+ 语言参考 Rev.4i前言感谢您购买本公司的机器人产品。
本手册记载了正确使用 EPSON RC+7.0 软件所需的事项。
请阅读本手册及相关手册后正确使用系统。
阅读之后,请妥善保管,以便随时取阅。
本公司的产品均通过严格的测试和检查,以确保机器人系统的性能符合本公司的标准。
但是如果在超出本手册所描述的环境中使用本产品,则可能会影响产品的基本性能。
本手册阐述了本公司可以预见的危险和问题。
请务必遵守本手册中的安全注意事项,安全正确地使用机器人系统。
商标Microsoft、Windows、Windows 标识、Visual Basic、Visual C++ 为美国MicrosoftCorporation 在美国及其它国家的注册商标或商标。
Pentium为美国英特尔公司的商标。
其它公司名称、商标名称、产品名称均为各公司的注册商标或商标。
关于标记Microsoft® Windows® 8 Operating systemMicrosoft® Windows® 10 Operating system在整个手册中,Windows 8以及Windows 10分别指上述相应的操作系统。
在某些情况下,Windows泛指Windows 8和Windows 10。
注意事项禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
爱普生机器人编程手册

集团管理咨询项目
© 公司版权所有 2008
为什么使用要机器人
▪ 替代人工,解决近几年人工成本的增长和招工难的问题 ▪ 人不愿意做的工作,恶劣环境下的工作,比如噪音大的环
境,污染的环境等等。 ▪ 需要精度较高,人手难以实现的工作,比如中源的帖胶
项目很难用治具人工操作。 ▪ 集成度高使用方便,减少设备开发周期。 ▪ 稳定性 ▪ 机器人可工作24小时 ▪ 消费者对商品多样化的需求
second 6237 mm/s
RC180/ RC620
± 0.015 mm 550 mm 0.39
second 7400 mm/s
RC180/ RC620
* 循环时集间团:管理负咨载询项1目kg,垂直向25mm,水平300mm的门型往返运动时间
LS3
3Kg
±0.01 mm 400 mm 0.45
second 6000 mm/s RC90
EPSON 机械手导入培训
爱普生中国 FA 营业本部 2012年2月12日
集团管理咨询项目
© 公司版权所有 2008
内容
一、关于机械手的基础知识 二、硬件概要 三、EPSON RC+ 用户界面 四、示教 五、SPEL+语言 六、动作指令 七、I/O 八、Pallet 九、!...! 并列处理 十、多任务处理
集团管理咨询项目
© 公司版权所有 2008
EPSON机器人的产品线
爱普生机器人
选件部分
SCARA(4轴)
Pro-six(6轴)
视觉
手编
控制器选件
G系列 LS系列 RS系列
C系列
另有业界最高集精团管理度咨询单项目 轴模块机械手
S系列 通讯板卡
机械手操作手册

机械手操作手册介绍本操作手册旨在提供机械手的操作指南和相关安全注意事项。
了解并遵守本手册中的操作规定,将有助于确保机械手的安全和正常运行。
操作步骤以下是机械手的基本操作步骤:1. 打开电源:在使用机械手之前,请确保已连接电源,并将电源开关置于"ON"位置。
2. 启动机械手:通过按下启动按钮或使用遥控器启动机械手。
请确保机械手处于稳定的平台上,以避免不必要的震动和移动。
3. 设置工作模式:根据具体任务需求,选择合适的工作模式。
常见的模式包括自动模式和手动模式。
4. 设置工作参数:根据具体任务需求,设置机械手的工作参数,如速度、力度等。
请务必参考机械手的技术手册以确保正确设置参数。
5. 执行任务:通过机械手的操作界面或遥控器,执行特定的任务。
根据任务的复杂程度和特征,可能需要使用特定的工具或附件。
6. 停止机械手:完成任务后,请按下停止按钮或使用遥控器停止机械手的运行。
安全注意事项在操作机械手时,请遵守以下安全注意事项:1. 穿戴个人防护装备:在操作机械手时,请佩戴适当的个人防护装备,如安全帽、安全鞋和手套。
2. 注意机械手周围的安全区域:确保机械手周围没有其他人员或障碍物。
此外,需要标示出机械手的作业区域,以保证其他人员的安全。
3. 注意机械手的负载能力:在执行任务前,请确保机械手的负载不超过其额定能力。
超负荷操作可能导致机械手损坏或事故发生。
4. 遵守机械手操作规程:请严格按照机械手的操作规程进行操作。
不要擅自修改或调整机械手的工作参数,除非经过授权。
5. 不要将手部或其他物体靠近机械手:在机械手运行时,不要将手部或其他物体靠近它的活动部件。
避免意外夹伤或其他伤害。
故障排除在机械手使用过程中,可能会遇到一些故障或问题。
以下是常见问题和相应的解决方法:1. 机械手无法启动:检查电源连接是否正确,确保电源开关处于"ON"位置。
2. 机械手运行缓慢:检查工作参数是否正确设置,可能需要增加速度或减少负载。
爱普生工业机器人EPSON LS系列机械手机械原点校准

5
一、LS系列机械原点调整
1.4 第三轴原点位置(如果已经移动上限位的限位圈或上限位圈被取下时时按 下图所示以第三轴末端与与第一臂底座距离调整第三轴位置。注意:移动第 三轴时可用点动移动,如果不能点动,则将三轴伺服释放然后按住第二轴上 的白色按钮移动Z轴到原点位置)
EPSON LS系列机械原点校准
深圳市长荣科机电设备有限公司
1
内容
一.机械原点位置 二.编码器脉冲复位
三.左右手精确校准
2
一、LS系列机械原点调整
1.1 原点位置
3
一、LS系列机械原点调整
1.2 第一轴原点位置
将键槽与底 座螺丝中心 对齐
1.3 第二轴原点位置
将此键与第 一轴上的小 槽对齐
4
一、LS系列机械原点调整
Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /2, Hofs(3), Hofs(4)
11
结束
谢谢
12
3.1 准备一个带针尖的夹具装到丝杆上,使针尖与丝杆中心同心,并在工作面 上画一个小十字叉,如下图所示: (对于有高精度矩阵或跟视觉配合做 高精度定位时,如果原点丢失进行校准时必须先按照第二章所叙做初略校准, 然后再进行左右手精确校准)
10
三左右手精确校准
3.2 移动机械手用左手姿势对正工作面上的十字叉,并将该点示教到P1点,然 后切换到右手姿势对正对正工作面上的十字叉,并将该点示教到P2点。然 后在“命令窗口”执行如下指令:
机械手操作手册

机械手操作手册
本操作手册提供了机械手的使用说明和相关操作规范,包括以下内容:
1. 机械手的基本组成
机械手主要由手臂、抓手、控制器和传感器等组成。
2. 机械手的使用说明
- 开机前,请确保机械手连接稳定,电源开关已经打开。
- 确定好机械手的工作范围和操作方式,注意安全。
- 操作过程中,遇到任何异常情况,请立即停止操作,联系维修人员进行处理。
3. 机械手的操作规范
- 使用机械手操作时,应按照操作规范进行操作,不得擅自更改程序或是进行其他操作。
- 遇到机械手故障时,应及时停机处理,并及时向相关人员汇
报和请维修人员进行处理。
- 机械手维护保养应定期进行,维护保养记录应及时更新和保存。
4. 注意事项
使用机械手时,必须注意以下事项:
- 操作时要保证安全,必要时要佩戴相关防护器具。
- 操作前应进行机械手的检查,确保机械手处于正常工作状态。
- 操作过程中应保持清醒,不得饮酒和使用药品。
以上是机械手操作手册的全部内容,为了您的安全和机械手的
正常使用,请全面了解和遵守操作手册中的相关规定和注意事项。
EPSON-LS系列手册(中文版)

EPSON-LS系列手册(中文版)这个手册旨在提供对EPSON-LS系列的总体描述和目的。
它将提供针对该系列的详细信息,包括产品规格、设置指南和操作步骤等。
无论是新手还是有经验的用户,都可以通过本手册来了解如何正确使用EPSON-LS系列产品,并充分利用其功能和特点。
本手册的目标是以简洁、清晰的语言提供信息,帮助用户快速上手并解决常见问题。
通过本手册,用户将能够全面了解EPSON-LS系列产品,并正确设置和操作其功能。
我们建议用户在使用EPSON-LS系列产品之前仔细阅读本手册,以确保能够获得最佳的使用体验。
请注意,本手册中的所有内容均基于最新可确认的信息。
在引用任何内容之前,请确保其准确性和可靠性。
本手册主要介绍EPSON-LS系列的主要特点和功能。
高精度定位:EPSON-LS系列手册采用先进的定位技术,可以实现高精度的定位和控制,确保产品的准确性和稳定性。
多功能操作:EPSON-LS系列手册提供多种操作模式,包括自动模式、手动模式和远程控制模式,能够适应不同的使用需求。
强大的数据处理能力:EPSON-LS系列手册配备了先进的数据处理功能,可以实时处理大量的数据,提供精确的结果和分析。
灵活的配置选项:EPSON-LS系列手册支持多种配置选项,可以根据用户的需求进行灵活的配置和定制。
易于使用和维护:EPSON-LS系列手册拥有直观友好的用户界面和简单易懂的操作流程,方便用户使用和维护。
以上是EPSON-LS系列手册的主要特点和功能,希望能够帮助用户更好地了解和使用该产品。
本手册将为您提供EPSON-LS系列设备的详细使用指南,包括操作步骤和注意事项。
请按照以下指南使用设备:准备工作:确保设备的电源已连接并正常工作。
将设备与计算机或其他外部设备正确连接。
操作步骤:打开EPSON-LS系列手册中提供的软件或应用程序。
在菜单中选择所需的功能或操作。
根据提示或手册中的说明执行相应的操作步骤。
注意事项:请务必仔细阅读并理解手册中的操作说明,遵循正确的操作步骤。
EPSON机械手LS系列安装及接线指导书
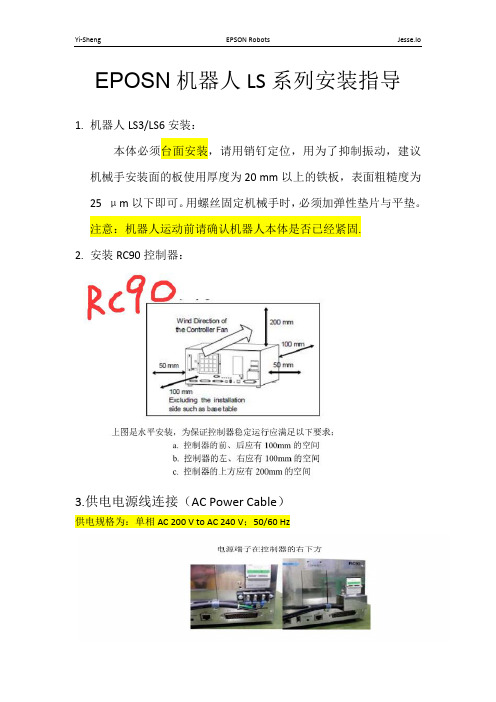
EPOSN机器人LS系列安装指导1.机器人LS3/LS6安装:本体必须台面安装,请用销钉定位,用为了抑制振动,建议机械手安装面的板使用厚度为20 mm以上的铁板,表面粗糙度为25 μm以下即可。
用螺丝固定机械手时,必须加弹性垫片与平垫。
注意:机器人运动前请确认机器人本体是否已经紧固.2.安装RC90控制器:3.供电电源线连接(AC Power Cable)供电规格为:单相AC 200 V to AC 240 V;50/60 Hz4.连接机器人马达电缆(M/C Power Cable)5.连接编码器电缆(M/C Signal cable)6.紧急开关及安全门端子排连接a. 紧急功能接头(25pin)图片:b.急停25pin信号分布表c.急停接线图(如果急停线接错有可能导致主板烧坏):d.常用急停25pin接线图参考:{根据急停接线图,(安全门短接,采用内部24V与0V(pin22~25))}7.I/O(输入输出)接线:a. I/O接头(50pin)图片b.50pin信号配置(共24个输入,16个输出):采用I/O远程控制时,为方便调试,必须有的信号为:输入信号:Pin2:输入No.0 (Start);用于启动机械手运动Pin6:输入No.4 (Stop);用于停止机械手运动Pin7:输入No.5 (Pause) ;用于暂停机械手运动Pin8:输入No.6 (Continue) ;用于继续机械手运动;Pin9:输入No.7 (Reset) ;用于复位机械手的急停,机械手的错误报警信号。
输出信号:Pin10:输出No.0 (Ready) ;用于监控控制器是否上电并启动OKPin11:输出No.1 (Running) ;用于监控机械手程序是否运行Pin12:输出No.2 (Paused) ;用于监控机械手是否暂停Pin13:输出No.3 (Error) ;用于监控机械手是否发生异常报警Pin14:输出No.4 (EstopOn) ;用于监控急停是否被按下或急停故障报错c.输入信号接线:RC90控制器输入电路使用双向光电耦合器,所以可以采用NPN与PNP两种接线方式,输入电流要求: 10 mA TYP/+ 24 V输入时,因此可进行下述2种配线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
iv
LS Rev.8
韩国 东南亚 印度 日本
Epson Korea Co., Ltd. Marketing Team (Robot Business) 27F DaeSung D-Polis A, 606 Seobusaet-gil, Geumcheon-gu, Seoul, 153-803 Korea TEL : +82-(0)-2-3420-6692 FAX : +82-(0)-2-558-4271
1.2.1 滚珠丝杠花键的强度 ....................................................................... 5 1.3 操作注意事项.............................................................................................. 6 1.4 紧急停止 ..................................................................................................... 8
LS Rev.8
v
对于欧盟客户
产品上的打叉带轮垃圾桶标签表示不得通过正常的生活垃圾流处理该产品及内置蓄 电池。为防止危害环境或人类健康,请将该产品及其蓄电池与其他废弃物流分开处 理,确保以环保方式对其回收利用。有关可用收集设施的更多信息,请联系当地政 府机构或购买本产品的零售商。使用化学符号Pb、Cd或Hg表示蓄电池中是否使用了 这些金属。 根据2006年9月6日发布的有关蓄电池和蓄能器及废弃蓄电池和蓄能器的欧洲议会和 理事会2006/66/EC号指令以及撤销指令91/157/EEC和将其纳入各国法律系统的法律, 此信息仅适用于欧盟客户。 对于其他国家,请联系当地政府调查回收该产品的可能性。 蓄电池拆卸∕更换程序见以下手册:
注意事项
禁止擅自复印或转载本手册的部分或全部内容。 本手册记载的内容将来可能会随时变更,恕不事先通告。 如您发现本手册的内容有误或需要改进之处,请不吝斧正。
垂询方式
有关机器人的修理∕检查∕调整等事项,请与服务中心联系。 未记载服务中心时,请与当地销售商联系。 联系时,请事先准备好下述各项。
- 控制器名称∕序列No. - 机器人名称∕序列No. - 软件名称∕版本 - 系统出现的问题
前言
感谢您购买本公司的机器人系统。 本手册记载了正确使用机器人所需的事项。 安装该机器人系统前,请仔细阅读本手册与其他相关手册。 阅读之后,请妥善保管,以便随时取阅。
保修
本机及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足 本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。(有关保 修期事项,请咨询您的区域销售办事处。)
Epson Singapore Pte. Ltd. Factory Automation System 1 HarbourFront Place, #03-02, HarbourFront Tower One, Singapore 098633 TEL : +65-(0)-6586-5696 FAX : +65-(0)-6271-3182
1.4.1 控制器固件7.0.2.3版或更早版本..................................................... 8 1.4.2 控制器固件7.0.2.4或更新版本 ...................................................... 10 1.5 无驱动电源时的紧急移动.......................................................................... 12 1.6 CP运动的ACCELS设置............................................................................ 13 1.7 机器人标签 ............................................................................................... 14
RC90控制器固件版本 Ver.3.0.*.* !!! OK
OK: 可连接 可使用EPSON RC+ 5.0与控制器具备的所有功能。
!!!: 可连接 虽然可连接,但推荐使用EPSON RC+ 5.0版本5.4.1或更新版本。 不能执行控制器固件的版本升级。
LS Rev.8
vii
B类型:附带有以下标签的机器人控制器RC90。
Epson India Pvt. Ltd. Sales & Marketing (Factory Automation) 12th Floor, The Millenia, Tower A, No. 1, Murphy Road, Ulsoor, Bangalore, India 560008 TEL : +91-80-3051-5000 FAX : +91-80-3051-5005
但在以下情况下,将对客户收取修理费用(即使在保修期内):
1. 因不同于手册内容的错误使用以及使用不当而导致的损坏或故障。 2. 客户未经授权进行拆卸导致的故障。 3. 因调整不当或未经授权进行修理而导致的损坏。 4. 因地震、洪水等自然灾害导致的损坏。
警告、小心、使用:
1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保 修无效。
机器人序列号:L6**00****
LS6-602* EPSON RC+ 7.0
7.0.1版或更早版本 7.0.2版或更新版本
RC90控制器固件 7.0.2.0版或更PSON RC+ 7.0与控制器具备的所有功能。
!!!: 可连接 虽然可连接,但推荐使用EPSON RC+ 7.0版本7.0.2或更新版本。
水平多关节型机器人
LS系列
机器人手册
Rev.8
C1M163R3183F
机器人手册 LS系列 Rev.8
水平多关节型机器人
LS系列 机器人手册
Rev.8
LS Rev.8
Copyright 2011-2015 SEIKO EPSON CORPORATION. All rights reserved. i
EPSON RC+
插图
在本手册中,使用标准型号机器人插图来进行说明。除非有特别说明,否则标准型 号与洁净型号的规格没有差异。
LS Rev.8
ix
x
LS Rev.8
基本篇
LS Rev.8
目录
1. 关于安全 ....................................................................................... 3
Epson Taiwan Technology & Trading Ltd. Factory Automation Division 14F, No.7, Song Ren Road, Taipei 110, Taiwan, ROC TEL : +886-(0)-2-8786-6688 FAX : +886-(0)-2-8786-6677
控制器手册∕机器人手册(维护章节)
vi
LS Rev.8
阅读本手册之前
本节介绍了您在阅读本手册之前应了解的事项。
控制系统的构成
通过以下控制器与软件组合构成了LS系列机器人系统。
A类型:
控制器 RC90
软件 EPSON RC+ 5.0
LS3-401*、LS6-602* 5.4.0版或更早版本
EPSON RC+ 5.0 5.4.1版或更新版本
服务中心
LS Rev.8
iii
制造商
Seiko Epson Corporation Toyoshina Plant Robotics Solutions Operations Division 6925 Toyoshina Tazawa, Azumino-shi, Nagano, 399-8285 Japan TEL : +81-(0)263-72-1530 FAX : +81-(0)263-72-1495
1.1 关于正文中的符号 ...................................................................................... 3 1.2 设计与安装注意事项................................................................................... 4
2. 本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故, 甚至是人身伤害或死亡,均不承担任何责任,敬请谅解。
3. 本公司不可能预见所有可能的危险与后果。因此,本手册不能警告用户所有可能 的危险。
ii
LS Rev.8
商标
Microsoft、Windows及Windows标识为美国Microsoft Corporation在美国和∕或其它国 家的注册商标或商标。其它品牌与产品名称均为各公司的注册商标或商标。
viii
LS Rev.8
启动∕关闭控制器
本手册在出现“将控制器电源设为ON(OFF)”的指示时,请务必启动∕关闭所有硬 件组件。关于控制器的构成,请参阅上表。
电机形状
使用的机器人电机形状与手册中描述的电机形状可能会因规格而异。