南京理工大学机械原理2011
南京理工大学机械原理课件资料
第32讲 从动件的运动规律
§9-2 从动件的运动规律 一、从动件的运动规律 二、从动件的常用运动规律 三、从动件运动规律的选择
上海海运大学专用
一、从动件的运动规律
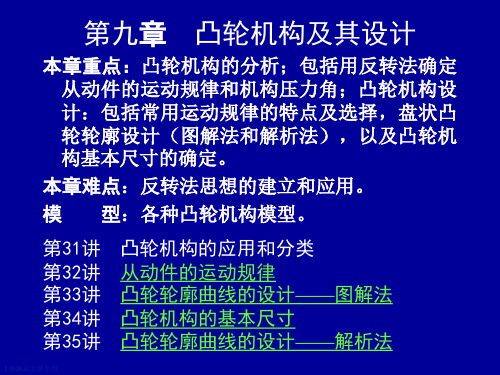
1、四个行程 以图9-6所示的偏置直动尖顶从动件盘状凸轮机构为例。 设O为凸轮的转动轴心,w为其匀角速度,凸轮轮廓由 四段曲线组成:曲线AB,O为圆心的圆弧 BC ,曲线 CD和基圆的 DA 圆弧。
且四大角可用偏距圆 的 4 条切线间的夹角 表示,如图 9-6 所示。
图9-6
上海海运大学专用
2、从动件的位移曲线
上述分析过程体现了反转法的思想: 让凸轮固定不动,推杆一方面随同机架沿-w方向 绕 O 反转,另一方面受凸轮轮廓所迫相对机架 作往复运动,则推杆与凸轮间的相对运动不变。 据反转法,易求得当尖顶与凸轮轮廓接触于任一 点E的推杆位移s=E'E和凸轮转角d=∠AOE',其 中E'为过E点的偏距圆切线和基圆的交点。 用同样的方法 ,求出许多 对(d,s)值,然后在 dOs 平面内作出推杆的位 移 曲 线 s=s(d) 。 s=s(d) 称 为从动件的运动规律。
上海海运大学专用
回程
回程:尖顶与凸轮轮廓接触点: C→D ,推杆由 最高位置 A' 下降到最低位置 A ,在回程运动过程 中 凸 轮 转 过 的 角 度 d0' 称 为 回 程 运 动 角 , d0'=∠C'OD。 近休:尖顶与凸轮轮廓接触点:D→A,推杆近停 不动;在近休运动过程中凸轮转过的角度d02称 为近休止角,d02=∠DOA。 显然,四大角的和等于2p。即 d0+d01+d0'+d02=360° (1 )
(d 0 d 01 d d 0 d 01 0.5d 0 )
南京理工机械原理
简单介绍一下自己,10、11两次考研,10年812机械原理只考了97分(实在是。
),11年137,现在已经顺利被录取,在这里和大家分享一点自己两次考专业课的经验和教训。
零、机械原理还是电子技术基础10年考完后听别人说电子技术比机械原理简单,分数一般都较高,11年因为10年已经复习过一次,而且感觉学机械出身的如果连老本行都学不好,岂不是很没出息,所以还是选择了机械原理。
后来和专业课老师比较熟之后听说他也给命题人说过难度不平衡的事。
考完后感觉11年是比10年简单,而一起复习电子技术的同学说题型比往年有变化,且略难。
这个只是我周围的感觉,不能代表整体。
到底考哪门,看你的喜好吧。
一、用的资料1教材教材一共使用了两本,一本本校王华坤范元勋老师编写的《机械设计基础上册》,一本东南大学郑文纬、吴克坚编写的《机械原理》两本书的主要区别是本校教材比较精炼,内容少,有听课的笔记。
东大教材的教材堪称经典,原理推导非常详细,课后题多,且可以找到其他出版社专门编写的答案,适合仔细研究。
两本教材以本校为主,交替使用。
2习题集习题集主要用了两本,一本是本校机械原理教研室编写的《学习指南和自测题集》(网上称为本校题库共207页),一本图书馆借的清华大学出版社出的机械原理习题集,具体名字记不清了,是蓝色封面,16开的。
其他还有随便翻翻的哈工大机械原理的配套解答,但是用的不多,只是看看题型和解题方法。
3真题及答案真题只做了04~10年的七套题,因为再往前几年的和现在的考试内容较为不同,参考价值不是太大。
答案是绝对没有官方正式版公布的,这是命题老师的明确答复。
目前有三个版本,一个是同学给的一份99~10年手写版答案,一个是EBXG(某机构缩写)的一本打印版不全的答案,还有一份是一起复习的研友找的另一个手写版,质量一般。
恩B翔G版本的错题较多,方法也不合理,和本校老师所讲的不一样,题目要求速度图解法,他却用瞬心法。
手写版的也有错题,但质量好一些。
南京理工大学机械原理第10章课件
上海海运大学专用
以滑块3为示力体,由力平衡条件可得:
R23 Q Q cos 或R23 sin( 90 ) sin 90 ( 2 ) cos( 2 )
R32 F F cos 或R32 sin( 2 ) sin 90 sin( 2 )
上海海运大学专用
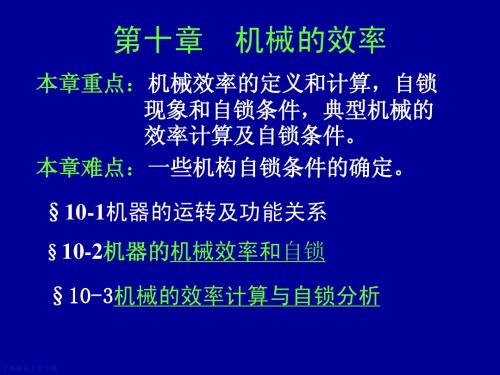
在一般情况下,机构中的驱动力和阻力为常数,有必要研究 效率能否用力(力矩)表示。 图示为一机械传动示意图
F vF
Pr QvQ Pd FvF
F为驱动力,Q为生产阻力 设该装置为不存在有害阻力的理想机器
Q vQ
机 器
F0——对应于Q的理想驱动力; F0 <F Q0——对应于F的理想有效阻力, Q0 >Q
上海海运大学专用
例1推导图所示偏心夹具的自锁条件。
解 : 要求在夹紧工件并撤 去手柄力 F 后,保证偏心 盘不能松转。
显然,使偏心盘发生松转 的力是 FR23 ,而 FR23 是作 用在轴颈O上的主动外 力。由轴颈的自锁条件 知,应保证: a=s-s1≤
上海海运大学专用
由几何关系知:
D s1 AC sin 2
Wk
k
W' k
(3)混联
由以上两种方法先分别求出后再根据具体路线计算
上海海运大学专用
二、机器的自锁 1、机器的自锁条件:
Wf 0
1
(1)若 W W f d
Wf Wd
0
1
0
(a)若机器原来就在运动,那它仍能运动,但此时,∴机器 不作任何有用的功,机器的这种运动称空转。 (b)若机器原来就不动,无论驱动力为多大,它所作的功 (输入功)总是刚好等于摩擦阻力所作的功,没有多余 的功可以变成机器的动能。∴机器总是不能运动,即发 生自锁
南京理工大学考研初试参考书
考试科目代码
考试科目
参考教材
出版社
作者
617
毛泽东思想与中国特色社会主义理论体系概论
《毛泽东思想和中国特色社会主义理论体系概论》(2018 修订版)
高等教育出版社
公共教材
871
马克思主义基本原理
国家马克思主义理论研究和建设工程重点教材,《马克思主义基本原理概论》(2018 年修订版)
高等教育出版社
大学语文
华东师范大学出版社
徐中玉等
现代汉语
高等教育出版社
黄伯荣、廖序东
253
英语(二外)
《现代大学英语》(1-4 册)
外语教学与研究出版社
杨立民等
624
基础日语
新编日语(重排版)(1-4)
上海外语教育出版社
周平、陈小芬
高级日语(1-2)
上海外语教育出版社
吴侃、村木新次郎
858
日语翻译
日汉翻译教程
上海外语教育出版社
人民教育出版社
中日合编
252
德语(二外)
《新编大学德语》(第二版)(1-3)
外语教学与研究出版社
朱建华等
623
基础英语
《现代大学英语》(1-6 册)
外语教学与研究出版社
杨立民等
《高级英语》(第三版)
张汉熙
857
翻译与写作
《实用翻译教程(英汉互译)》(第 3 版)
上海外语教育出版社
冯庆华
《英语写作手册》
中国人民大学出版社
高鸿业
828
管理学原理
《管理学教程》(2011 年)第 3 版
上海财经大学出版社
周健临
829
会计学
南京理工大学考研初试参考书
范钦珊
845
普通物理(B)
《普通物理学》(第五版)
高等教育出版社
程守洙
《物理学》(第四版)
高等教育出版社
马文蔚
846
材料力学
《材料力学》(第五版)
高等教育出版社
刘鸿文
考试科目代码
考试科目
参考教材
出版社
作者
346
体育综合
运动训练学
人民体育出版社 2012
田麦久、刘大庆 著
学校体育学
人民体育出版社 2004
西南交通大学出版社
李骏
考试科目代码
考试科目
参考教材
出版社
作者
614
普通物理(A)
《普通物理学》(第五版)
高等教育出版社
程守洙
《物理学》(第四版)
高等教育出版社
马文蔚
616
数学分析
《数学分析》
高等教育出版社
华东师范大学
823
电子技术基础
《电工学》(第五版)下册
高等教育出版社
秦增煌
或《模拟电路与数字电路》
白中英
840
高等代数
《高等代数》
高等教育出版社
北京大学
823
电子技术基础
《电工学》(第五版)下册
高等教育出版社
秦增煌
《模拟电路与数字电路》
电子工业出版社
寇戈、蒋立平
考试科目代码
考试科目
参考教材
出版社
作者
826
企业管理
《管理学原理》(第二版,2011 年)
机械工业出版社
陈传明、周小虎
827
经济学原理
《西方经济学》(第五版或第六版)
南京理工大学机械原理题库综合题

南京理⼯⼤学机械原理题库综合题12 综合题1.⼀操纵机构如图⽰,原动件1绕O 匀速转动,通过2驱使3运动。
已知R 112= cm ,R 220= cm , R l l l l O O O O O O O O 31223313074=====cm,cm,cm ,试:(1)按⽐例画出机构运动简图;(2)构件1作匀速整周转动时,构件3是作整周转动还是摆动?⽤数学式证明。
2.试列举出五种能将连续回转运动转换为直线运动的机构,要求画出机构⽰意图 , 写上机构名称。
3.在图⽰轮系中,已知z z z z 13462288===,,,试求:(1)传动⽐i 16;(2)该机构的⾃由度F ,并指明虚约束、复合铰链和局部⾃由度。
4.转动轴线互相平⾏的两构件中,主动件作匀速转运,从动件作往复摆动,若要求主动件每转动⼀周,从动件往复摆动⼀次,试:(1)确定采⽤什么机构(⾄少确定两种机构);(2)画出其简图;(3)简单说明设计该机构尺⼨时应注意哪些问题。
5.在图⽰机构中,已知?ω116050010===,mm,rad /s h ,构件3的重量Q 310=N ,⽣产阻⼒P r N =100 ,其余构件的重量和惯性⼒不计,试:(1)写出速度和加速度向量⽅程式,作速度和加速度多边形图,确定在图⽰位置时构件3的速度和加速度的⼤⼩及⽅向;(2)计算构件3的惯性⼒P I3,并在构件3上标明⽅向;(3)计算作⽤在构件3上的⼒P r 、Q 3,P I3等效到构件1上的等效⼒矩M ,并标明其⽅向。
r6.图⽰正切机构中,已知x l AD ====50100104511 mm,mm, rad/s, ω?,构件3的质量m 310= kg ,其它构件质量忽略不计。
作⽤在D 点的驱动⼒F d N =10(重⼒加速度g =10 m /s 2),试:(1)⽤相对运动图解法求C 点的速度r v C 和加速度ra C ;(2)计算构件3的惯性⼒P I3,并求作⽤在C 点的阻⼒F r 。
南京理工大学机械原理题库 机械原理题库机械的运转及其速度波动的调节
08 机械的运转及其速度波动的调节1.设某机器的等效转动惯量为常数,则该机器作匀速稳定运转的条件是,作变速稳定运转的条件是 。
2.机器中安装飞轮的原因,一般是为了 ,同时还可获得 的效果。
3.在 机 器 的 稳 定 运 转 时 期, 机 器 主 轴 的 转 速 可 有 两 种 不 同 情 况, 即 稳 定 运 转 和 稳 定 运 转, 在 前 一 种 情 况, 机 器 主 轴 速 度 是 , 在 后 一 种 情 况, 机 器 主 轴 速 度 是 。
4.机器中安装飞轮的目的是和 。
5.某 机 器 的 主 轴 平 均 角 速 度ωmrad /s =100, 机 器 运 转 的 速 度 不 均匀 系 数δ=005., 则 该 机 器 的 最 大 角 速 度ωmax 等 于 r ad/s, 最 小 角 速 度ωm i n 等 于r ad/s。
6.某机器主轴的最大角速度ωmax rad /s =200,最小角速度ωmin rad /s =190,则该机 器的主轴平均角速度ωm 等于 r ad/s ,机器运转的速度不均匀系数δ等于。
7.机器等效动力学模型中的等效质量(转动惯量)是根据 的原则进行转化的,因而它的数值除了与各构件本身的质量(转动惯量)有关外,还与 。
8.机 器 等 效 动 力 学 模 型 中 的 等 效 力 ( 矩 ) 是 根 据的 原 则 进 行 转 化 的 , 等 效 质 量 (转 动 惯 量 ) 是 根 据 的 原 则 进 行 转 化 的 。
9.机器等效动力模型中的等效力(矩)是根据的原则进行转化的,因而它的数值除了与原作用力(矩)的大小有关外,还与 有关。
10.若机器处于起动(开车)阶段,则机器的功能关系应是 ,机器主轴转速的变化情况将是 。
11.若机器处于停车阶段,则机器的功能关系应是 ,机器主轴转速的变化情况将是 。
12.用 飞 轮 进 行调 速 时, 若 其 它 条 件 不 变, 则 要 求 的 速 度 不 均 匀 系 数 越 小, 飞 轮 的 转 动 惯 量 将 越 , 在 满 足 同 样 的 速 度 不 均 匀 系 数 条 件 下, 为 了 减 小 飞 轮 的 转 动 惯 量, 应 将 飞 轮 安 装 在 轴 上。
南理工机械原理本科课件(章)
绪论一、研究对象1、机械:机器和机构的总称机器(三个特征):①人为的实物组合(不是天然形成的);②各运动单元具有确定的相对;③必须能作有用功,完成物流、信息的传递及能量的转换。
机器的组成:原动机、工作机、传动部分、自动控制工作机机构:有①②两特征。
很显然,机器和机构最明显的区别是:机器能作有用功,而机构不能,机构仅能实现预期的机械运动。
两者之间也有联系,机器是由几个机构组成的系统,最简单的机器只有一个机构。
2、概念构件:运动单元体零件:制造单元体构件可由一个或几个零件组成。
机架:机构中相对不动的构件原动件:驱动力(或力矩)所作用的构件。
→输入构件从动件:随着原动构件的运动而运动的构件。
→输出构件机构:能实现预期的机械运动的各构件(包括机架)的基本组合体称为机构。
二、研究内容:1、机构的结构和运动学:①机械的组成;②机构运动的可能性和确定性;③分析运动规律。
2、机构和机器动力学:力——运动的关系·F=ma功——能3、要求:解决二类问题:分析:结构分析,运动分析,动力分析综合(设计):①运动要求,②功能要求。
新的机器。
第一章平面机构的结构分析(一)教学要求1、了解课程的性质与内容,能根据实物绘制机构运动简图2、熟练掌握机构自由度计算方法。
了解机构组成原理(二)教学的重点与难点1、机构及运动副的概念、绘机构运动简图2、自由度计算,虚约束,高副低代(三)教学内容§1-1 机构结构分析的目的和方法研究机构的组成原理和机构运动的可能性以及运动确定的条件1、对一个运动链2、选一构件为机架3、确定原动件(一个或数个)4、原动件运动时,从动件有确定的运动。
§1-3 平面机构运动简图一、用规定的符号和线条按一定的比例表示构件和运动副的相对位置,并能完全反映机构特征的简图。
二、绘制:3)选择合理的位置,即能充分反映机构的特性;4)确定比例尺,())(mmm l图上尺寸实际尺寸=μ5)用规定的符号和线条绘制成间图。
南京理工大学《812机械原理》历年考研真题(含部分答案)专业课考试试题
2016年南京理工大学机械原理考研真题(回忆版) 2015年南京理工大学812机械原理考研真题 2013年南京理工大学812机械原理考研真题 2012年南京理工大学812机械原理考研真题及答案 2011年南京理工大学812机械原理考研真题 2010年南京理工大学机械原理考研真题 2009年南京理工大学机械原理考研真题 2008年南京理工大学机械原理考研真题 2007年南京理工大学机械原理考研真题 2006年南京理工大学机械原理考研真题 2005年南京理工大学机械原理考研真题 2004年南京理工大学机械原理考研真题 2002年南京理工大学机械原理考研真题 2001年南京理工大学机械原理考研真题 2000年南京理工大学机械原理考研真题
2010年南京理工大学机械原理考 研真题
2009年南京理工大学机械原理考 研真题
2008年南京理工大学机械原理考 研真题
2007年南京理工大学机械原理考 研真题
2006学机械原理考 研真题
2004年南京理工大学机械原理考 研真题
2002年南京理工大学机械原理考 研真题
2001年南京理工大学机械原理考 研真题
2000年南京理工大学机械原理考 研真题
2016年南京理工大学机械原理考 研真题(回忆版)
2015年南京理工大学812机械原理 考研真题
2013年南京理工大学812机械原理 考研真题
2012年南京理工大学812机械原理 考研真题及答案
2011年南京理工大学812机械原理 考研真题
2011南理工春季蹭课大全
机械学院
徐亚栋
Ⅳ-A101
Ⅳ-A505
火炮自动机设计 火炮反后坐装置设计
2 2
机械学院 机械学院
张相炎 郑建国
Ⅳ-A505 Ⅳ-A202 Ⅳ-A202 Ⅳ-A508
固体火箭发动机传热学
2.5
机械学院
鞠玉涛
Ⅳ-A508
发射装置控制系统设计基础
2
机械学院
李开明
Ⅳ-A509 Ⅳ-A509 Ⅳ-A510
自动武器现代设计方法
2 2
机械学院 机械学院
陈安明 王芳
Ⅳ-A507 Ⅳ-A506 Ⅳ-A506 Ⅳ-B409
微机原理及应用
3
机械学院
徐骏善
Ⅳ-B409
自动武器结构设计原理 可编程控制器及应用
4 2
机械学院 机械学院
徐万和
江剑 Ⅳ-A310 Ⅳ-A310
现代引信构造与作用 毕业设计 毕业设计
3 14 14
机械学院 机械学院 机械学院
机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院 机械学院
韩军 陶卫军 于敏建 童一飞 黄新燕 曹春平 曹春平 黄晓华 韩军
王益祥
Ⅳ-A311 Ⅳ-B412 Ⅳ-B412 Ⅳ-B309 Ⅳ-B309 Ⅳ-A302 Ⅳ-A302 Ⅳ-A103 Ⅳ-A103 Ⅳ-A106 Ⅳ-A106 Ⅳ-B410 Ⅳ-B410 Ⅳ-B311 Ⅳ-B311 II-106 II-106 Ⅳ-B308 Ⅳ-C210 Ⅳ-C210 Ⅳ-C201
王良模 汪惠芬 藤燕 张铁山 李柯 杜忠华
王益祥 聂伟荣
Ⅳ-C401 Ⅳ-C401 I-105 I-105
2013+-+2011年+-+南京理工大学+机械原理+考...

南京理工大学 812机械原理 2013年真题解析1.分析计算下图所示的平面机构自由度,如存在复合铰链、局部自由度以及虚约束,请指出。
此题有两个小题,第二个小题的构件数目太多(17个好像),题目不难,有些繁琐。
解:第一个图F=1第二个图构件多,只有虚约束和复合铰链。
2.如图四杆机构ABCD,四杆长均已知。
AB 杆的角速度已知w 1。
1)自定义比例尺画机构简图,标出所有瞬心。
2)若∠BAD=165°,求出C 点的速度V C ; 3)画出C 点速度为零时,机构的位置。
解:1)瞬心易求。
2)先画出机构简图,然后V C =V B +V CB v B 的方向垂直AB 杆,大小W 1×l AB v CB 垂直于BC 杆。
画速度分析图可求的。
3)即死点。
AB和BC共线时。
C点速度为0。
3.如图凸轮机构,已知凸轮半径R,OA,滚子半径r。
,BC,B点位置确定。
(1)画出理论轮廓线、基圆,并标出基圆半径;(2)画出凸轮在图示E点处的压力角α;(3)标出升程角φ,并说明凸轮的转向。
解:1)理论轮廓线:OC为半径 O为圆心基园:OA和凸轮交点M,以AM为半径,A为圆心画圆2)反转法。
B点绕A点转动,BC长固定,OE延长交理论轮廓线线于点P,以P 为圆心,BC为半径可求出B'点。
P点速度垂直与B'C杆,力垂直于切线。
F和V 的夹角即为E点压力角。
3)OA延长,交凸轮于MN两点,由MN两点找出BC杆的位置,然后,两个B1和B2的对圆心A的夹角即为升程角。
这里要自己假设凸轮的转向。
然后反转判断哪个角是升程角。
4. 在图示机构中,各杆杆长已知,构件2以等角速度w2按一定方向转动,当∠BAD一固定角度时,运用图解法求出6杆的角速度α,角加速度ε。
解:6杆的分析就是分析4件上的C点。
对2构件扩大到C点,然后列两个速度和加速度方程,一个是C点,一个是D 点。
即可求解。
5.机构设计题。
机构简图如下:题目要求是使该机构在整个行程中有较小的压力角,画出机构简图,并求出OA,OC,DB的长度。
南京理工大学机械原理chapter4Planarlinkagemechanismppt课件

C
2
B
3
1 4
A
D
Unbalanced throw screen mechanism 惯性筛机构
平行四边形机构:Parallel-crank Mechanism
正平行四边形机构如天平称、机车联动机构、摄影 平台升降机构和播种料斗机构等。两曲柄等速转动
Antiparallel-crank Mechanism 反平行四边形机构:两对杆长度相等,但不平行。 当以长边为机架时,两曲柄等速反向转动。用于 车门开闭机构,如图所示。
(1)Replacing a revolute pair with a sliding pair
Slider-crank mechanism 曲柄滑块机构 (偏距e)
e≠0, Offset slider-crank mechanism 偏置曲柄滑块机构
e=0, Centric slider-crank mechanism 对心曲柄滑块机构
(a) Crank-rocker mechanism Foot operated sewing machine
雷达天线俯仰机构
(b) Double-crank mechanism
If one crank rotates at a constant speed, the other crank will rotate in the same direction at a varying(变化的) speed. 当主动曲柄匀速转动时,从动曲柄作变速转动。
c)crank and oscillating block mechanism摇块机构 Self-tipping vehicle自卸车辆
d)translating sliding-rod mechanism 移动导杆机构或定块机构
南京理工大学机械原理chapter3kynematicanalysisppt课件
Vc 2
Vc 3
C
2
2
3 3
A P12
B P13
1
3.2.5 Applications of Instant Centers Example1: Locate all instant centers for the revolute four-bar linkage.
(1) locate all instant centers for the mechanism
Theory of Machines and Mechanisms
(机械原理)
Chapter1 Introduction Chapter2 Structural Analysis of Planar Mechanisms Chapter3 Kinematic Analysis of Mechanisms Chapter4 Planar Linkage Mechanisms Chapter 5 Cam Mechanisms Chapter 6 Gear Mechanisms Chapter 7 Gear Trains Chapter 8 Other Mechanisms in Common Use Chapter 9 Balancing of Machinery Chapter 10 Motion of Mechanical Systems and Its Regulation Chapter 11 Efficiency of Machine
相对运动图解法:
用相对运动原理列出各构件上点与点之间的相对运动矢 量方程式,并用一定比例尺作矢量多边形,从而求构件上 某点的速度、加速度或角速度、角加速度。
复习:相对运动原理 刚体的平面运动
刚体(构件)的平面运动分解为两个运动:
南京理工大学《机械原理》期末题

机械原理期末试题卷(A)班级____________姓名____________学号___________成绩_____________一、判断题(10分)[对者画√,错者画×]1、对心曲柄滑块机构都具有急回特性。
()2、渐开线直齿圆柱齿轮的分度圆与节圆相等。
()3、当两直齿圆柱齿轮的安装中心距大于标准中心距时,为保证无侧隙啮合,应采用正传动。
()4、凸轮机构中当从动件的速度有有限量突变时,存在柔性冲击。
()5、用飞轮调节周期性速度波动时,可将机械的速度波动调为零。
()6、动平衡的转子一定满足静平衡条件。
()7、斜齿圆柱齿轮的法面压力角大于端面压力角。
()8、加工负变位齿轮时,齿条刀具的分度线应向远离轮坯的方向移动。
( )9、在铰链四杆机构中,固定最短杆的邻边可得曲柄摇杆机构。
()10、平底直动从动件盘状凸轮机构的压力角为常数。
()二、填空题(10分)1、机构具有确定运动的条件为________________________。
2、平面八杆机构共有_________瞬心。
3、渐开线齿廓上最大压力角在________圆上。
4、当行程速比系数K=1.5时,机构的极位夹角θ=__________。
5、举出两种可实现间歇运动的机构。
________________________。
6、偏置滚子(尖顶)直动从动件盘状凸轮机构的压力角表达式tgα=______。
7、渐开线齿轮的齿廓形状与哪些参数有关?_____________。
8、机械中安装飞轮的目的是_____________。
9、直齿圆锥齿轮的当量齿数Zv=__________。
10、在连杆机构中处于死点位置的γ=__________;α=__________。
三、简答题(10分)1、为了实现定传动比传动,对齿轮轮廓曲线有什么要求?2、计算机构自由度时有哪些注意事项?3、计算混合轮系传动比有哪些步骤?4、铰链四杆机构中存在双曲柄的条件是什么?5、机构等效动力学模型中的四个等效量有哪些?分别是根据何种原理求得?四、计算如图8.1发动机配气机构的自由度。