UART中断方式
UART串口通信—控制LED灯中断法
UAR串口通信一控制LED丁(中断法)项目说明:1. 通过串口来控制LED灯,发送1 (十六进制)点亮LEDT C 8个LED蓝灯),发送2 (十六进制)关闭LE[灯(8个LE[蓝灯)。
2. 通信速率:9600bps (即波特率为9600)3. 串口通信采用中断的方法。
此项目练习的目的:(我们应掌握如下知识点)( 1 )熟悉串口中断相关寄存器的配置。
( 2)学会串口中断的使用方法。
完整代码:#include "reg52.h"/* 串口初始化:主要涉及寄存器配置*/void UartInit(void) // 初始化uart{TMOD = 0X20; // 定时器1定时器方式工作模式2,可自动重载的8位计数器常把定时/计数器1 以模式2 作为串行口波特率发生器SCON = 0X50; // 串口选择工作模式1使能接收,允许发送,允许接收PCON = 0X00; //8 位自动重载,波特率加倍TH1 = 0XFD; // 用11.0592MHz波特率9600TL1 = 0XFD;TR1 = 1; // 打开中时器/* 由于我们采用中断法,所以我们还需要对串口中断相关的寄存器进行配置*/ES = 1;// 串口中断EA= 1;//CPU 总中断}// 写串口中断响应的服务程序:void UartISR(void) interrupt 4{unsigned char TempDat;if (RI)/* 查询串口是否接收到一个完整的数据*/{RI = 0;/* 清除标志,准备下一次判断*/TempDat = SBUF;/* 读取串口数据*/if (1 == TempDat)/* 判断串口接收到的数据*/{P1 = 0;/*如果接收到的数据是1,贝U点亮8个LED蓝灯*/}} else if (2 == TempDat){P1 = 0xff;/* 如果接收到的数据是2,则关闭8个LED蓝灯*/}} else{}} }void mai n(void){Uartl nit();/* 调用串口初始化函数,进行相应的配置,如波特率等 */ while(1)〃 不用干啥事,一直等待就行。
串口dma空闲中断 处理数据

串口dma空闲中断处理数据串口(Universal Asynchronous Receiver/Transmitter,简称UART)是一种常见的串行通信接口。
DMA(Direct Memory Access,直接内存访问)是一种数据传输方式,它可以在CPU的参与下完成数据传输。
DMA空闲中断是指在DMA传输完成后触发的中断,用于处理接收到的数据。
本文将介绍串口DMA空闲中断的原理、应用场景以及实现方法。
一、串口DMA空闲中断的原理在传统的串口通信中,数据的接收通常由CPU轮询方式完成。
即时数据到达,CPU也需要花费较多的时间才能处理。
而在高速数据传输的场景下,这种方式可能导致数据丢失或者延迟较高。
为了解决这个问题,可以使用DMA方式进行数据传输。
DMA是一种通过DMA控制器来完成数据传输而无需CPU参与的方式。
DMA控制器可以直接从外设读取数据,并将数据存放到内存中,或者直接从内存中取数据,并发往外设。
串口DMA空闲中断的原理是基于DMA传输的方式实现的。
当串口接收到数据后,DMA控制器会将数据从串口缓冲区读取,并存储到内存中。
当DMA传输完成后,会触发一个空闲中断,通知CPU接收完成。
CPU可以在这个中断中处理接收到的数据。
二、串口DMA空闲中断的应用场景串口DMA空闲中断适用于高速数据传输的场景,比如串口通信中的大数据传输、高速数据采集等。
在串口通信中的大数据传输场景中,传统的CPU轮询方式可能导致接收到的数据丢失或者延迟较高。
使用串口DMA空闲中断可以提高数据传输的效率和稳定性。
在高速数据采集场景中,传感器数据的采集频率可能很高,传统的CPU轮询方式处理数据可能无法满足实时性的要求。
使用串口DMA空闲中断可以提高数据采集的效率和准确性。
三、串口DMA空闲中断的实现方法实现串口DMA空闲中断的方法如下:1. 配置串口DMA传输。
首先,需要提前配置好串口的波特率、数据位、停止位、校验位等参数。
HAL库UART的几个常用函数讲解+中断处理过程讲解

HAL 库UART 的⼏个常⽤函数讲解+中断处理过程讲解【开源】做了⼀个STLINK/V2-UART ⼆合⼀编程器【实战经验】UART 应⽤异常案例分析HAL 库是⽐较全⾯的,封装⽐较彻底的,也是功能⽐较强⼤的。
使⽤HAL 库,我们直接调⽤它的API 函数,不⽤关⼼它的底层操作过程。
使⽤HAL 库,省去了好多繁琐的处理过程,不再需要我们⾃⼰写如等待等过程。
HAL 库也包含如Ethernet 、USB 等⾼级外设的驱动。
对于初接触它的⼈来说,尤其是⽤惯了标准库的⼈,总会有各种不适应和排斥感。
就拿UART 来说,我们通过中断⽅式接受或发送数据。
如果仿真调试的话,会发现UART 有开关中断的现象,⽽不是中断⼀直开着。
下⾯,就讲解UART 常⽤函数以及中断处理过程。
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);串⼝发送,串⼝发送,发送指定长度的数据。
如果超时没发送完成,则不再发送,返回超时标志发送指定长度的数据。
如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT )。
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData,uint16_t Size, uint32_t Timeout);串⼝接收,串⼝接收,接收指定长度的数据。
如果超时没接收完成,则不再接收数据到指定缓冲区,接收指定长度的数据。
如果超时没接收完成,则不再接收数据到指定缓冲区,返回超时标志(HAL_TIMEOUT )。
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);串⼝中断发送,以中断⽅式发送指定长度的数据。
UART通信程序_中断方法

int int_flag; int_flag++; UART0_SendByte(rebuf[send_pointer]); } else { send_pointer=0; } } if(int_flag==4) { rebuf[re_pointer]=U0RBR; if (re_pointer>=10) { UART0_SendByte(rebuf[0]); re_pointer=0; } } VICVectAddr=0; } re_pointer++;
通信参数设置
void UART0_Init(void){ uint16 Fdiv; PINSEL0 = 0x00000005; U0LCR = 0x83; Fdiv = (Fpclk / 16) / 9600; U0DLM = Fdiv / 256; U0DLL = Fdiv % 256; U0LCR = 0x03; }
UART通信程序中断实现方法 通信程序中断实现方法
——发送中断与接收中断 发送中断与接收中断
声明: 声明:本文著作权归电子科技大学中山学院嵌入式系统实验室所有 著作人: 著作人:邓春健
UART通信程序 通信程序 ——发送中断程序 发送中断程序
回忆: 回忆:P297页使用查询方式从串口发送多个字节数 页使用查询方式从串口发送多个字节数 据
STM32 HAL库USART中断接收不定长数据——空闲中断法

STM32 HAL库USART中断接收不定长数据——空闲中断法STM32cubeMX软件配置好串口中断,导出工程并打开,定义串口接收缓冲区和接收长度的全局变量:uint8_t RX_data[1000];uint16_t RX_len;在main函数的初始化中开启IDLE中断并首次打开中断接收函数://开启IDLE中断__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);//中断接收函数,这里设置最大接收长度为1000HAL_UART_Receive_IT(&huart1, (uint8_t*)RX_data, 1000);添加IDLE中断处理函数:void UsartReceive_IDLE(UART_HandleTypeDef *huart){__HAL_UART_CLEAR_IT(&huart1,UART_CLEAR_IDLEF); //清除中断RX_len = 1000 - huart1.RxXferCount; //计算接收数据长度HAL_UART_AbortReceive_IT(huart); //终止接收// 用户数据处理,如将接收到的内容重新发送// HAL_UART_Transmit_IT(&huart1, (uint8_t*)RX_data, RX_len);HAL_UART_Receive_IT(&huart1, (uint8_t*)RX_data, 1000); //接收完数据后再次打开中断接收函数}打开stm32fXxx_it.c文件(X视具体芯片系列),在USART1_IRQHandler()函数中添加IDLE中断服务:if(__HAL_UART_GET_IT(&huart1,UART_IT_IDLE) != RESET) //判断是否为IDLE中断{UsartReceive_IDLE(&huart1); //调用IDLE中断处理函数}。
uart中断触发方式
uart中断触发方式
UART(通用异步收发器)是一种串行通信协议。
在单片机中,我们经常使用UART作为与其他设备或芯片进行通信的接口。
当接收到数据时,有两种方式可以将其传递给单片机处理:轮询和中断。
在轮询方式下,单片机会不断地检查UART接收寄存器是否有新的数据。
若存在数据,单片机会将其读取并进行处理。
这种方式会浪费大量的处理器时间,并且无法及时响应接收到的数据。
中断方式则是一种更高效的方式。
它允许单片机在接收到数据时立即停止正在执行的任务,转而处理接收到的数据。
使用中断方式可以大大减少CPU的轮询时间,提高系统效率。
UART中断可以由两种方式触发:接收中断和发送中断。
接收中断触发方式如下:UART会接收到一帧数据后,将其存储在接收寄存器中。
当接收缓冲区中有数据时,这时如果启用了接收中断,则将触发中断。
中断程序将从接收寄存器读取数据,然后进行进一步逻辑处理。
发送中断触发方式如下:当发送寄存器为空时,这时如果启用了发送
中断,则将触发中断。
中断程序将从发送缓冲区中读取下一个字节,并将其写入发送寄存器,以便于发送。
总之,在单片机中使用UART进行通信时,中断方式是一种更高效的方式。
通过观察UART的接收缓冲区和发送寄存器状态,可以确定何时触发中断并执行相应的中断程序。
通过这种方式可以高效地处理数据,提高系统效率。
利用中断实现UART串口

利用中断实现UART串口串口通信是计算机与外部设备进行数据传输的一种方式,可以使用各种方法实现。
其中一种常见的实现方式是使用中断来实现UART串口通信。
UART(Universal Asynchronous Receiver/Transmitter)是一种通用的异步串行通信接口,广泛应用于计算机和外部设备之间的数据传输。
在UART通信中,数据以字节为单位进行传输,每个字节都包含一个起始位、8个数据位、可选的奇偶校验位和一个停止位。
UART通信可以通过中断来实现,中断在接收和发送数据时起到相应的作用。
下面是实现UART串口通信的步骤:1.初始化串口参数:包括波特率、数据位、校验位、停止位等。
2.初始化中断控制器:将串口接收和发送的中断使能。
3.编写中断处理函数:包括接收和发送中断处理函数。
接收中断处理函数的基本流程如下:-判断接收缓冲区是否有数据可读,如果没有则直接返回。
-读取接收缓冲区的数据,并做相应的处理。
发送中断处理函数的基本流程如下:-判断发送缓冲区是否有空间可写,如果没有则直接返回。
-将要发送的数据写入发送缓冲区,并触发发送操作。
在中断处理函数中,需要使用适当的数据结构来保存接收和发送的数据,以及相应的状态信息。
除了中断处理函数,还需要编写主程序来初始化串口和中断控制器,并监控串口的数据传输。
主程序可以使用循环来接收和发送数据,或者等待外部事件触发中断。
总结来说,通过使用中断来实现UART串口通信,可以实现数据的异步传输和高效处理,提高系统的响应速度和并发性。
同时,中断的使用也能减少对CPU资源的占用,提高系统的性能。
串口的三种工作模式

串⼝的三种⼯作模式
串⼝⼀般有两种⽅式:查询和中断;STM32还⽀持第三种DMA⽅式。
1、查询:
串⼝程序不断地循环查询标志,看看当前有没有数据要它传送或接收。
如果有的话进⾏相应的写操作和读操作进⾏传送或接收数据。
特点:
查询⽅式的效率是⽐较低的,并且由于STM32的UART硬件上没有FIFO,如果程序功能⽐较多,查询不及时的话很容易出现数据丢失的现象,故实际项⽬中这种⽅式⽤的并不多。
2、中断
平时串⼝只要打开中断即可。
如果发现有⼀个中断来,则意味着有数据需要接收(接收中断)或数据已经发送完成(发送中断)。
特点:
中断⽅式的话我们可以分别设置接收中断和发送中断,当串⼝有数据需要接收时才进⼊中断程序进⾏读读操,这种⽅式占⽤CPU资源⽐较少,实际项⽬中⽐较常⽤,但需要注意中断程序不要太复杂使执⾏时间太长,如果执⾏时间超过⼀个字符的时间的话也会出现数据丢失的现象,这个波特率⽐较⾼的串⼝编程中⽐较容易出现,可以考虑⽤循环BUF⽅法,在中断程序中只负责实时地接收实数数和发送时的填数(写发送寄存器),其它操作放在中断外处理。
3、DMA⽅式
设置好DMA⼯作⽅式,由DMA来⾃动接收或发送数据。
特点:
STM32还提供了第三种DMA⽅式⽤来⽀持⾼速地串⼝传输。
这种⽅式只要设置好接收和发送缓冲位置,可以由DMA来⾃动接收和发送数据,这可以最⼩化占⽤CPU时间。
I2C,SPI,USB,UART常见接口的原理简析

常见接口电路介绍一、I2C总线简介1. 什么是I2C?NXP 半导体(原Philips 半导体)于20 多年前发明了一种简单的双向二线制串行通信总线,这个总线被称为Inter-IC 或者I2C 总线。
目前I2C 总线已经成为业界嵌入式应用的标准解决方案,被广泛地应用在各式各样基于微控器的专业、消费与电信产品中,作为控制、诊断与电源管理总线。
多个符合I2C 总线标准的器件都可以通过同一条I2C 总线进行通信,而不需要额外的地址译码器。
由于I2C 是一种两线式串行总线,因此简单的操作特性成为它快速崛起成为业界标准的关键因素2. I2C总线的基本概念1)发送器(Transmitter):发送数据到总线的器件2)接收器(Receiver):从总线接收数据的器件3)主机(Master):初始化发送、产生时钟信号和终止发送的器件4)从机(Slave):被主机寻址的器件其线路结构图如下:如上图示,I2C 总线具有如下特点:1)I2C 总线是双向传输的总线,因此主机和从机都可能成为发送器和接收器。
不论主机是发送器还是接收器,时钟信号SCL 都要由主机来产生2)只需要由两根信号线组成,一根是串行数据线SDA,另一根是串行时钟线SCL3)SDA 和SCL 信号线都必须要加上拉电阻Rp(Pull-Up Resistor)。
上拉电阻一般取值3~10KΩ4)SDA 和SCL 管脚都是漏极开路(或集电极开路)输出结构3. I2C总线的信号传输1)3种速率可选择标准模式100kbps、快速模式400kbps、最高速率3.4Mbps2)具有特定的传输起始、停止条件a)起始条件:当SCL 处于高电平期间时,SDA 从高电平向低电平跳变时产生起始条件。
起始条件常常简记为Sb)停止条件:当SCL 处于高电平期间时,SDA 从低电平向高电平跳变时产生停止条件。
停止条件简记为P3)数据传输从确定从机地址开始a)多个从机可连接到同一条I2C 总线上,它们之间通过各自唯一的器件地址来区分b)一般从机地址由7 位地址位和一位读写标志R/W 组成,7 位地址占据高7 位,读写位在最后。
USART串口通信,中断方式,一分钟从菜鸟到大师(完整版)
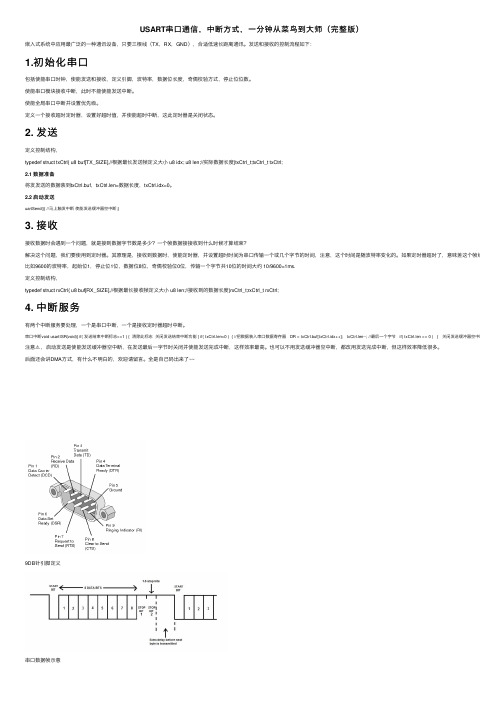
USART串⼝通信,中断⽅式,⼀分钟从菜鸟到⼤师(完整版)嵌⼊式系统中应⽤最⼴泛的⼀种通讯设备,只要三根线(TX,RX,GND),合适低速长距离通讯。
发送和接收的控制流程如下:1.初始化串⼝包括使能串⼝时钟,使能发送和接收,定义引脚,波特率,数据位长度,奇偶校验⽅式,停⽌位位数。
使能串⼝模块接收中断,此时不能使能发送中断。
使能全局串⼝中断并设置优先级。
定义⼀个接收超时定时器,设置好超时值,并使能超时中断,这此定时器是关闭状态。
2. 发送定义控制结构,typedef struct txCtrl{ u8 buf[TX_SIZE],//根据最长发送帧定义⼤⼩ u8 idx; u8 len;//实际数据长度}txCtrl_t;txCtrl_t txCtrl;2.1 数据准备将发发送的数据装到txCtrl.buf,txCtrl.len=数据长度,txCtrl.idx=0。
2.2 启动发送uartSend(){ //马上触发中断使能发送缓冲器空中断;}3. 接收接收数据时会遇到⼀个问题,就是接到数据字节数是多少?⼀个帧数据接接收到什么时候才算结束?解决这个问题,我们要使⽤到定时器。
其原理是,接收到数据时,使能定时器,并设置超时时间为串⼝传输⼀个或⼏个字节的时间,注意,这个时间是随波特率变化的。
如果定时器超时了,意味差这个帧结束了。
⽐如9600的波特率,起始位1,停⽌位1位,数据位8位,奇偶校验位0位,传输⼀个字节共10位的时间⼤约 10/9600=1ms.定义控制结构,typedef struct rxCtrl{ u8 buf[RX_SIZE],//根据最长接收帧定义⼤⼩ u8 len;//接收到的数据长度}rxCtrl_t;rxCtrl_t rxCtrl;4. 中断服务有两个中断服务要处理,⼀个是串⼝中断,⼀个是接收定时器超时中断。
串⼝中断void usartISR(void){ if( 发送结束中断标志==1 ) { 清除此标志关闭发送结束中断功能 } if( txCtrl.len>0 ) { //把数据装⼊串⼝数据寄存器 DR = txCtrl.buf[txCtrl.idx++]; txCtrl.len--; //最后⼀个字节 if( txCtrl.len == 0 ) { 关闭发送缓冲器空中断,使能发送注意⚠ ,启动发送是使能发送缓冲器空中断,在发送最后⼀字节时关闭并使能发送完成中断,这样效率最⾼。
一种UART串行端口的中断控制方法研究
XR1L 8 芯 片具有 l 个 8 i全局 配置 寄存器 , 6 74 5 bt 支持 R 一3 / S4 2R 8 S2 2R 一2 / S4 5等多种 传输 协议 。 四个
UA T分别 具有 6B t输 出和 接收 FF 、6 8 i R 4 ye IOs1 个 t b
配置 寄存器对 应各 自通道 的相关 参数 的配置 。
解 决查 询方 式下 串行 端 口存 在 的 问题 。
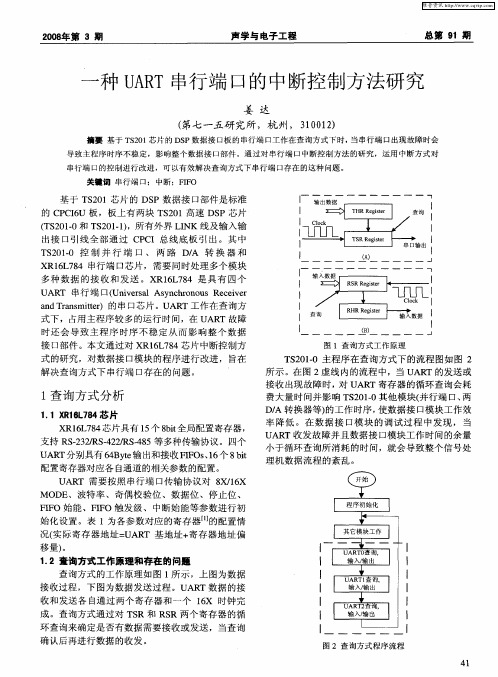
T 2 10 主程 序在 查 询方 式 下 的流 程 图如 图 2 S0.
1 询 方 式 分 析 查
1 1X 1L 8 。 R 6 7 4芯 片
所 示 。在 图 2虚线 内的流 程 中 ,当 UA T的发送 或 R 接 收 出现 故 障时 , U R 对 A T寄存 器 的循 环查 询会 耗 费大量 时 间并 影 响 T 2 10其 他模 块( 行端 口、 S0— 并 两 DA 转 换器 等) / 的工作 时序 , 使数 据接 口模块 工作 效 率 降低 。在 数 据 接 口模 块 的调 试 过 程 中发 现 , 当 U T收 发 故障 并且 数据 接 口模 块工 作 时 间的余 量 AR 小 于循 环 查询所 消 耗 的 时间 ,就会 导致整 个信 号 处 理 机数 据 流程 的紊 乱 。
UA T 需 要按 照 串行 端 口传输 协 议对 8 /6 R X 1X
MO 、波特 率 、奇 偶校 验位 、数据 位 、停 止位 、 DE
FF 始 能 、F F 触 发级 、中断始 能等参 数进 行 初 IO IO 始 化 设置 。表 1为 各参数 对 应 的寄存 器 【的配置 情 1 ] 况 ( 际寄 存器 地 址= 实 UAI 基 地 址+ 寄存 器 地 址偏 移 量) 。
串口中断UART0
关于串口0终端服务程序IRQ_UART0()IIR?U0IIR?答:U0IIR是接收器缓存寄存器U0RBR:接收器缓存寄存器访问时,先要设定U0LCR 的除数锁存访问位(DLAB)为0。
因为,U0DLL 与U0RBR/U0THR 在同一地址上。
DLAB = 1 时,选择U0DLL 和U0DLM (U0DLM 和U0IER 在同一个地址上);DLAB = 0 时,选择U0RBR/U0THR 和U0IER。
U0DLL 和U0DLM:构成一个16 位的除数。
VPB时钟(pclk) 是产生波特率的时钟源,波特率时钟源必须是波特率的16倍,于是有:baud_rate = pclk/(16*设定的除数)UART0 的中断:有4 个中断,分别是:RBR 中断;THRE 中断;Rx 线中断;其中RBR 中断里面包含有2个中断:数据可用RDA中断和接收超时CTI 中断。
FAQ一:1、什么是RDA 中断?当接收的有效数据到达接收FIFO设置寄存器(U0FCR) 中设置的触发点时,RDA中断被激活。
U0FCR[7:6]=00 触发点0(1字节);U0FCR[7:6]=01 触发点1(4字节);U0FCR[7:6]=01 触发点2(8字节);U0FCR[7:6]=01 触发点1(14字节);发生中断后,U0IIR[3:0] 内容为:0100。
如果发生中断后,读一下U0RAR 寄存器,那么就会得到最早到达的数据。
这时,FIFO 中的有效数据小于预定触发点,清零RDA 中断。
该中断的优先级为 2 。
2、什么是CTI 中断?在接收FIFO 中,有效的数据少于触发个数时,但至少有一个时,如果长时间没有数据到达,将触发CTI 中断。
这里所说的“长时间”是指在接收 3.5~4.5 个字节所需要的时间。
发生中断,则U0IIR[3:0] 内容为:1100。
在中断后,若从U0RBR 中读取接收FIFO中的数据,或者有新的数据送入接收FIFO中,这都将清零CTI 中断。
串口中断

串口编程(UART0)之中断方式---------------------------------------------------------from :/tigerjbEmail :jibo.tiger@---------------------------------------------------------三.中断方式的串口编程1.用中断方式编写串口程序由那几部分组成2.硬件上的支持1>UART0 发送FIFO缓冲区A. UART0含有1个16字节的发送FIFO缓冲区B. U0THR是UART0发送FIFO的最高字节C. UART的发送FIFO是一直使能的2>UART0接收FIFO缓冲区A. UART0含有一个16字节的接收FIFO缓冲区。
B. 软件设置接收FIFO缓冲区的触发字节。
3> 中断接口:UART0的中断接口包含中断使能寄存器(U0IER)和中断标识寄存器(U0IIR)。
l U0IIR:提供状态码用于指示一个挂起中断的中断源和优先级。
l U0IER可以控制UART0的4个中断源。
4> UART0有4个中断源:A. RLS(接收线状态)中断:(1) 优先级最高(2) 它在以下条件发生时产生错误l 帧错误(FE)l 溢出错误(OE)l 奇偶错误(PE)l 间隔中断(BI)注:Ø 可以通过查看U0LSR[4:1]中的值看到产生该中断的错误条件Ø 读取U0LSR寄存器时清除该中断。
B. RDA(接收数据可用)中断:(1)与CTI中断并列第二优先级。
(2)在以下情况触发中断:l 当接收的有效数据到达接收FIFO设置寄存器(U0FCR)中设置的触发点时,RDA 被激活。
当接收FIFO中的有效数据少于触发点时,RDA复位。
l 中断过程:1> 移位寄存器(U0RSR)从RxD引脚接收串行数据后,送入接收FIFO中2> 当接收FIFO中的有效数据数量达到预定的触发点时,置位RDA中断。
UART串口通讯(中断)

• UART接收FIFO缓冲区
UnRSR
• UART0、UART1各含有1 个16字节的接收FIFO缓冲 区。 • 软件设置接收FIFO缓冲区 的触发字节。
RXD
接收FIFO
UnFCR
UnRBR
UART FIFO控制寄存器 位 功能 7 6 [5 : 3] — 2 复位TxFIFO 1 复位RxFIFO 0 使能FIFO Rx触发点设置
中断服务函数
• void UART0_IRQHandler(void) • {int i; • switch(U0IIR & 0x0f) • { • case 0x04: //RxFIFO达到14字节 • for(i=0;i<13;i++) RcvBuf[RcvP++]=U0RBR; break; • case 0x0c: //接收超时, 表示数据结束 • while(U0LSR & 0x01) RcvBuf[RcvP++]=U0RBR; • RcvL=RcvP; //一帧数据结束标志 • RcvP=0; break; //准备接受下一数据 • case 0x02: //发送缓冲器空 • if(TxdP==TxdL) {U0IER = 0X05; // THRE中断禁止 • TxdL=TxdP=0;} • else {for(i=16;i>0;i--) {if(TxdP==TxdL) break; //发送字符完 • else U0THR = TxdBuf[TxdP++];} } break; • case 0x06: //状态中断 • RcvL=U0LSR; //读状态, 清除错误标志 • RcvP=RcvL=TxdP=RxdL=0; break; • } }
实验七、UART串行数据通信实验

实验七、UART串行数据通信实验1(查询与中断方式)一、实验目的通过实验,掌握UART查询与中断方式的程序的设计。
二、实验设备●硬件:PC 机一台●LPC2131教学实验开发平台一套●软件:Windows98/XP/2000 系统,ADS 1.2 集成开发环境。
●EasyARM工具软件。
三、实验原理EasyARM2131 开发板上,UART0 的电路图如图8.1 所示,当跳线JP6 分别选择TxD0和RxD0 端时方可进行UART0 通讯实验。
图8.1 UART0 电路原理图四、实验内容实验内容1使用查询方式,通过串口0 接收上位机发送的字符串如“Hello EasyARM2131!”,然后送回上位机显示,主程序以及各子程序流程如图8.2 所示。
(改写发送内容,字符个数不同)。
说明:需要上位机(PC机)串口终端如EasyARM.exe 软件。
使用串口延长线把LPC2131教学实验开发平台的CZ2(UART0)与PC机的COM1 连接。
PC 机运行EasyARM 软件,设置串口为COM1,波特率为115200,然后选择【设置】->【发送数据】,在弹出的发送数据窗口中点击“高级”即可打开接收窗口。
图8.2 串口实验相关程序流程图1.实验预习要求①研读LPC2000 UART工作原理与控制章节,注意FIFO 接收情况的特性。
②了解LPC2131教学实验开发平台的硬件结构,注意串口部分的电路。
2.实验步骤①启动ADS 1.2,使用ARM Executable Image for lpc2131工程模板建立一个工程DataRet_C。
②在user 组中的main.c 中编写主程序代码,在项目中的config.h 文件中加入#include <stdio.h>。
③选用DebugInFlash生成目标,然后编译连接工程。
④将EasyARM2131开发板上的JP6跳线分别选择TxD0和RxD0端时,方可进行UART0通信实验。
OMAP 138-UART中断
.global _TIMER1_TINT12_isr .global _TIMER1_TINT34_isr .global _UART_INT2_isr;原为_vector8 .global _vector9 .global _vector10 .global _vector11
; This is a macro that instantiates one entry in the interrupt service table. VEC_ENTRY .macro addr STW B0,*--B15 MVKL addr,B0 MVKH addr,B0 B LDW NOP NOP NOP .endm ; This is a dummy interrupt service routine used to initialize the IST. _vec_dummy: B B3 NOP 5 ; This is the actual interrupt service table (IST). .sect ".vecs" .align 1024 _intcVectorTable: _vector0: _vector1: _vector2: _vector3: _vector4: _vector5: _vector6: _vector7: _vector8: _vector9: VEC_ENTRY _c_int00 VEC_ENTRY _vec_dummy VEC_ENTRY _vec_dummy VEC_ENTRY _vec_dummy ;RESET ;NMI ;RSVD ;RSVD B0 *B15++,B0 2
批注本地保存成功开通会员云端永久保存去开通
OMAPL138-UART 中断
uart帧中断实现原理

UART(Universal Asynchronous Receiver/Transmitter)是一种常见的串行通信接口,用于在计算机和外部设备之间传输数据。
UART帧中断是一种实现方式,用于在接收到完整的UART 数据帧时触发中断。
UART帧中断的实现原理如下:
1. 配置UART控制器:首先需要配置UART控制器的相关寄存器,包括波特率、数据位数、停止位数、校验位等参数。
这些参数需要与发送方设备保持一致,以确保正确的数据传输。
2. 接收数据:当UART控制器接收到一个字节的数据时,会将其存储在接收缓冲区中。
接收缓冲区通常是一个FIFO (First-In-First-Out)队列,用于存储接收到的数据。
3. 检测帧结束:UART帧通常由起始位、数据位、校验位和停止位组成。
在接收数据时,UART控制器会检测起始位和停止位的边沿,以确定一个完整的数据帧是否接收完成。
4. 触发中断:当UART控制器检测到一个完整的数据帧时,会触发一个中断信号。
中断信号会通知处理器,表示有新的
数据可供处理。
5. 中断处理程序:一旦中断信号被触发,处理器会跳转到预先定义的中断处理程序。
中断处理程序会读取接收缓冲区中的数据,并进行相应的处理,例如存储到内存中或进行进一步的处理。
需要注意的是,UART帧中断的实现可能会因不同的硬件平台和操作系统而有所差异。
上述步骤仅为一般的实现原理,具体的实现方式可能会有所不同。
协议中UART的两种模式
^^…… 协议栈中 UART 有两种模式: 1、中断 2、DMA 对于这两种模式具体运用在哪一步 ,纠结了很久.通过 UART 配置结构: typedef struct { uint8 *rxBuf; uint8 rxHead; uint8 rxTail; uint8 rxMax; uint8 rxCnt; uint8 rxTick; uint8 rxHigh; uint8 *txBuf; #if HAL_UART_BIG_TX_BUF uint16 txHead; uint16 txTail; uint16 txMax; uint16 txCnt; #else uint8 txHead; uint8 txTail;
PDF 文件使用 "pdfFactory Pro" 试用版本创建
/************************************** 中断函数完成了把 U0DBUF 里一字节的数据传送到 rxBuf[ ]存储空间去.这里 rxHead 是指 向 rxBuf[ ]的指针,看单词像是指在数组的头,其实应理解为 rxBuf[ ]接收数据的个数(以 字节为单位).rxMax 是 rxBuf[ ]可以存储最大字节数,为128.而后面当用 HalUARTRead() 来读取 rxBuf[ ]时,rxTail 应理解为 rxBuf[]转移出去数据的个数 (同样以字节为单位).那数 据传送到 rxBuf[ ]存储空间去后呢?先看下 pollISR() *****************************************************************************/ //大概每200ms 调用 pollISR()函数.当串口 UxDBUF 接收到一字节数据产生中断,在中断 //程序中把 UxDBUF 中数据传送到 rxbuf[ ]中(这有个坎要跨过来,pollISR()200ms 才被调 用一次, 而不是每次中断后都调用一次 , 如果串口接收的是大的数据包, 则200ms 内 rxbuf[ ] 已经接收了约48字节(这个后面分析),中断了48次??.当然如果串口没有接收到数据,也就 是说没有发生串口接收中断,cfg 应为是为空的,则 cnt=0).此后 pollISR()进行轮询,主要 是重置超时时间和计算 rxbuf[ ]还有多少数据没有读走(即 cnt).然后再跳回到 HalUARTPoll()函数进行下一步处理. static void pollISR( uartCfg_t *cfg ) { uint8 cnt = UART_RX_AVAIL( cfg );//计算 rxBuf[]中还有多少数据没有读出(以字节为 单位) if ( !(cfg->flag & UART_CFG_RXF) ) //UART_CFG_RXF:Rx flow is disabled.rx 流控 制未关闭 { // If anything received, reset the Rx idle timer. //如果又有新的数据接收到,则重置超时时间 if ( cfg->rxCnt != cnt ) { cfg->rxTick = HAL_UART_RX_IDLE; cfg->rxCnt = cnt;
uart中断触发条件

uart中断触发条件
UART中断触发条件是当UART收到一个字符或一组字符时,会发
生中断。
在UART中,中断触发条件可以通过设定相应的控制寄存器来
实现。
当设置接收中断允许并启用中断后,当接收缓冲区已满或接收
到的字符匹配预设的比特数时将发生中断。
下面是一些常见的UART中断触发条件:
1. 接收中断触发条件:当UART接收到超时或者缓冲区已满的渐
进标志,或者接收到的字符匹配预设比特数时,将会触发接收中断。
这意味着,当UART接收到预设的字符且接收缓冲区没有满时将触发中断。
2. 发送中断触发条件:发送中断可以在任何数据发送到UART中
时启用,当所有数据都被传输时,将会触发发送中断。
3. 错误中断触发条件:当UART检测到一个传输错误(如未知字符,停止位错误)时将会触发错误中断,以便立即停止传输。
在嵌入式系统中,UART中断是一项必须的功能,这是因为它可以有效地降低CPU的负载,让CPU可以同时处理其他任务,提高系统的
性能。
同时,在UART通信中,中断可以避免数据的丢失和延迟,保障
数据的有效性。
在特定的应用场景中,需要针对UART的中断触发条件进行定制,以满足特定的需求。
例如,为了提高高速数据传输的实时性和可靠性,可以将接收缓冲区大小和中断触发条件调整为适当的值,以便更快地
传输数据和更好地处理传输错误。
总之,UART中断触发条件是在UART通信中获取或处理数据时必
须考虑的关键因素。
了解和掌握这些触发条件能够帮助开发人员更好
地利用UART功能,提高嵌入式系统的性能和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制寄存器C
工作模式设置
通信模式: 同步通信?异步通信?主SPI模式? 工作模式: 查询模式?(无需使能中断) 中断模式?(使能中断) 中断级别: 高级?中级?低级?
工作模式设置
工作模式设置用到的寄存器
控制寄存器A
工作模式设置
工作模式设置用到的寄存器
PORTC_DIR&=~0x04;
USARTC0_BAUDCTRLA =0x0c; USARTC0_BAUDCTRLB =0x00;
USARTC0.CTRLC=0x03;
设置工作模式 (异步、高级中断、使 能发送接收) 发送或接收数据
USARTC0_CTRLA=0x30; USARTC0_CTRLB|=0x18; }
TxD0
TxD0 RxD0
ATxmega 128A1
RxD0
其它 通信设备
TxD0
ATxmega
128A1
RxD0
232 电平转换
TxD0
RxD0
PC机串口
ATxmega128A1 UASRT特点
• • • • • •
支持同步或异步通信模式 高精度的波特率发生器 支持5/6/7/8/9位数据位和1或2位停止位 支持数据溢出和帧错误检测 噪声滤波,数字低通滤波 支持三种独立中断:
UART的物理连接
使用UART通信需要两个引脚,分别为:
引脚名称 RxD TxD 类型 输入 输出 描述 串行输入,接收数据 串行输出,发送数据
ATxmega128A1的I/O 电压为3.3V(可承受 5V),连接时须注意 电平的匹配。 与PC机相连时,由于 PC机串口是RS232电 平,所以连接时需要 使用RS232转换器。
1
引脚设置
波特率设置
2
3
通信参数设置
4
工作模式设置
引脚设置
设置引脚连接模块,将对应 I/O连接到UART。 GPIO
UART
……
波特率设置
波特率设置
波特率设置用到的寄存器
通信参数设置
• 设置通信帧格式 数据位:5?6?7?8?9? 校验位:有或无? 停止位:1?2?
通信参数设置
通信参数设置用到的寄存器
控制寄存器B
Bit 4 - RXEN: Receiver Enable Bit 3 - TXEN: Transmitter Enable
UART初始化代码
UART初始化代码:
void Usart_Init(void) { PORTC_DIR|=0x08;
设置引脚连接模块 将对应IO连接到 UART 设置串口波特率 9600bps 设置通信帧格式
• TX Complete Interrupt • TX Data Register Empty Interrupt • RX Complete Interrupt
帧格式
波 特 率 发 生 器
发 送 单 元
接 收 单 元
本节提纲
UART简介 Biblioteka UART初始化 控制器的设计 作品演示
UART初始化
基于UART控制器的设计
——中断方式实现
组员:谢振峰、王焕君、王招凡、赵实丰
本节提纲
UART简介 UART初始化 控制器的设计 作品演示
什么是UART
UART即Universal Asynchronous Receiver/Transmitter的 缩写,即通用异步接收/发送装置,具有以下的特点: 1、串行数据总线,用于异步通信,该总线双向通信,可以 实现全双工传输和接收 2、通信硬件电路具备简单 3、通信速度慢,有效传输距离短; 4、常用于板级通信
检查串口状态字或 等待串口中断
本节提纲
UART简介 UART初始化 控制器的设计 作品演示
基于UART的控制器设计
PC端软件
USB转串口 ATxmega128A1 开发板
灯 光 控 制
光 控 模 块
无 线 模 块
音 乐 演 奏
本节提纲
UART简介 UART初始化 控制器的设计 作品演示
演示流程
• PC端软件通过串口发送: • 0xaa 灯全开 • 0xbb 灯全灭 • 0xcc 使能光控模块 • 0xdd 禁用光控模块 • 0xee 使能按键音乐演奏
SHOW TIME