北斗卫星 - 国产化北斗专用芯片样机的设计与实现
卫星导航芯片研发制造方案(一)

卫星导航芯片研发制造方案一、实施背景随着全球卫星导航系统的不断升级和完善,卫星导航芯片的需求量逐年增加。
同时,新一代卫星导航系统的发展,要求芯片具备更高的精度、更强的抗干扰能力、更低的功耗以及更小的体积。
针对这一市场需求,我们提出以下卫星导航芯片研发制造方案。
二、工作原理本方案所涉及的卫星导航芯片,基于全球卫星导航系统(GNSS)进行设计。
主要工作原理是,通过接收来自卫星的信号,并对其进行解码和解析,从而确定目标物体的位置、速度和时间信息。
芯片内置的高性能处理器和算法,可以对接收到的信号进行处理,消除噪声干扰,提高定位精度。
同时,通过集成先进的功率管理技术,可以有效降低芯片的功耗。
三、实施计划步骤1.市场调研与需求分析:对当前市场上的卫星导航芯片进行调研,了解客户需求和竞争对手情况。
分析市场趋势和发展方向,为研发工作提供指导。
2.技术研究与方案设计:开展技术研究,包括卫星导航信号的特性和接收方法、高性能处理器的设计和实现、低功耗技术等。
根据需求分析,制定详细的芯片设计方案。
3.硬件设计:根据方案设计,进行芯片的硬件设计,包括电路设计、版图绘制、性能仿真等。
4.软件编程:开发适用于芯片的软件程序,包括算法实现、信号处理、定位解算等。
5.系统集成与测试:将硬件和软件集成在一起,进行系统测试。
对芯片的功能和性能进行全面检测,确保其符合设计要求。
6.产品化和市场推广:完成芯片的量产和品质控制工作,准备市场推广。
制定营销策略,加强与客户的沟通,提高品牌知名度。
四、适用范围本方案适用于各种需要卫星导航定位的领域,如航空航天、航海、汽车电子、智能手机、可穿戴设备等。
通过不断升级和完善,该卫星导航芯片有望在全球范围内得到广泛应用。
五、创新要点1.集成化设计:将高性能处理器、低功耗技术以及其他先进技术集成到单一芯片中,提高了芯片的集成度和性能。
2.多样化的应用场景:针对不同领域的需求,提供多种封装形式和接口,方便客户灵活应用于各种设备。
“北斗”应用 多用“中国芯”
“北斗”应用多用“中国芯”潘少军2013-05-22 06:48:00 来源:《人民日报》( 2013年05月22日 09 版)核心阅读作为国家战略性基础信息平台,我国自主建设、独立运行的北斗卫星导航系统,自2012年底启动区域性正式服务以来,其产业化备受各界关注。
尽管性能不俗,北斗的产业化之路才刚刚起步。
业内人士呼吁,在卫星导航系统核心技术和市场的白热化竞争中,关系着用户信息安全的“北斗”,在应用上是否用上“中国芯”,亟待各方重视。
近日,记者在上海交通大学航空航天学院导航制导与控制研究所的“北斗+GPS双模测试室”看到,这里全部采用国产“北斗主板”,并建立了由几个以“北斗主板”为核心的基站构成的CORS网(定位导航虚拟参考网),能让使用该网和“北斗主板”的用户将测量精度提高到厘米级。
在性能上已不逊于国外同类产品的“北斗”,在产业化之路上是否能一帆风顺?起步晚,价格高,“北斗”产品在市场竞争中处劣势据介绍,“北斗”的民用领域,主要包括普通民用导航、精密授时服务、专业高精度应用等。
现在通过各种导航仪、测量仪等终端设备,已经有很多北斗用户可以体验到车载和手机定位导航、民航飞机和渔船的定位导航等普通民用导航服务;银行、证券、保险、电网、移动通信等行业,需统一授予时间信号,精度达到几百万年或几千万年误差不超过1秒,这就是精密授时服务;像大坝、高铁、桥梁的变形监测,属于专业高精度应用。
通过遍布全国的CORS网,其精度能提高到厘米、毫米级。
但是,记者了解到,目前我国的这些民用领域,“北斗”的主要竞争对手——GPS占据着绝对优势,其中,授时系统甚至全部是GPS授时系统。
目前中国GPS 用户超过了1亿。
作为市场中的后来者,正式服务仅半年的“北斗”,用户数量差距巨大。
业内人士称,刚刚起步的“北斗”产业处于初期的无序竞争状态,产业政策不清晰,产品缺少技术标准,价格居高不下。
以车载卫星导航定位仪为例,目前GPS价格为数百元至一两千元,“北斗”附带短报文通信功能的用户机,价格要6000多元,不带此功能则价格与GPS相差不多,在竞争中没有价格优势。
北斗基带芯片中的ARM控制单元设计
北斗基带芯片中的ARM控制单元设计作者:张泽军林平分来源:《数字技术与应用》2012年第03期摘要:北斗卫星导航接收机包含天线、RF模块、A/D和北斗卫星导航基带芯片等部分,而北斗基带芯片由基带硬件处理单元、SoC控制逻辑单元和数据处理及PVT解算单元组成。
本文对北斗基带芯片中的SoC控制单元进行研究,设计中采用ARM7TDMI内核,模块化设计并集成,最终在FPGA原型平台上验证实现,为北斗基带芯片的下一步开发做了充分准备以及保证了将来流片的成功率。
关键词:北斗卫星导航FPGA原型平台SoC中图分类号:TN47 文献标识码:A 文章编号:1007-9416(2012)03-0000-001、引言我国现在的卫星定位系统处于发展阶段,目前国内很多公司正在着力于北斗卫星导航芯片的研发,不久的将来我国会拥有自主知识产权的北斗卫星导航芯片。
基于此现状,本文对北斗卫星导航芯片中的一部分单元进行研究与设计。
北斗卫星导航接收机包含天线、RF模块、A/D、北斗基带芯片等部分,而北斗基带芯片由基带硬件处理单元、SoC控制系统单元、数据处理及PVT解算单元组成。
基带硬件处理单元包括捕获和跟踪两部分,捕获意味着找到一个确定的卫星信号(获取载波频率及扩频码相位信息);跟踪主要是发现导航数据相位的变化,这两部分一般是由硬件实现。
SoC控制系统单元负责控制基带芯片完成对卫星信号的捕获,后将捕获结果回送至跟踪模块实现实时跟踪,同时运行基带算法程序,将基带信号经过解调得到导航数据、PVT解算等一系列的基带处理,最后将得到的PVT解通过UART输出到PC终端显示出来。
本文主要是对北斗基带芯片中的SoC控制系统单元进行研究与设计,并在FPGA原型平台上验证实现。
根据北斗卫星导航芯片的应用需求,SoC控制系统单元选用了ARM7TDMI处理器核。
2、基于ARM7的SoC控制单元设计2.1系统架构设计架构设计是整个SoC系统设计的关键步骤,为了增加设计的可复用性,本设计中采用了AMBA总线的连接方式,总线是一种共享资源,在某一时刻,只能有一个模块驱动总线,这样才不会发生冲突。
基于FPGA和DSP的北斗1PPS授时系统的设计与实现
科
基于 F G 和 DS P A P的北斗 1 P S授 时 P 系统 的设 计与实现
陈 芬 芬
( 中北大学信息与通信 工程 学院 , 山西 太原 00 5 ) 3 0 1
摘 要 :高 精度秒脉冲授时 信号对现代科技有深远的意义, 出 提 一种基于 F G P A和 D P S 的算法实现在弱电磁环境下精确的北斗授 时秒信号,给出了 FG P A硬件算法、 M d lm平 台下的仿真结果和在 D P 在 oe i s S 上进行修正的方法, 并在基于 F G + S 的接收机上 实现对星测试 , P ADP 结果为在输入时钟频率准确 度 ≤ll 的条 下, 信号 1 P ( l e s cn 输 出的准确度为与标准 G S x 件 秒 P S u ePr e0 由 Ps P 时间信号源的时间间隔≤1 0 n, 0 0s 满足大部分情况下授时需求。
关 键词 : 时 ;P S北 斗卫 星 授 1P ; 引言
随着科技 的发展 ,高精度授时需求越来越 。 大, 但是 目 前我国利用 G S P 卫星实现授时基本采 用封装好 的 O M 模块提 供 的 1 P u eP r E P S Pl e s scn 信 号进行授时I 在特殊战争情况下 G S e d o l 用, P : 器 8 … 一… 一一… 一 戛盹 一耋 塑 一 0 0 的可利用l 生受到限制 , 技术 自主} 生也受到限制。 随 到用户机 1 。 00 。 。 着我国 自 主导航系统的 日 益成熟,高精度的授时 这段距离 安( 。。 ¨地 f} h P S算法时序 的示意图 图 4 北斗秒脉 冲与 G S P 秒脉冲时 间间隔 信号的提供变得更加迫切。基于 F G P A和 D P的 的延 时后 图 1 1 P S 平 台上实现精确的北斗秒信号输出。能够实现在 的 3 P S 2P 信号同步的情况下得到精确秒信号 , 失锁后能高 信 号 , 这 精度守时 , 在失锁再次同 步时能提供稳定的北斗 些 时 延 同步秒信号,即在弱 电磁环境下实现北斗精确授 T 由 以 时 , 国自主导航系统的应用有现实意义。 对我 下6 部分 1 1P 信号的实现原理 P S 组成: 目 图 21P P S仿 真波形 -= + 基于 F G qD P P A - S 的秒信号精确授时方案是 q f 1 . 由 FG P A捕获导航电文的同步帧头,经处理得到 T 2 T + + + 滞后的秒信号,由D P S 去修正电 情 的输出位 下 4 下 5 置, 得到—个与北斗时同步的秒信号。F G P A部分 下 6 完成 由间隔为 3 2 m 的 3 P S 1 5 s 2 P 脉冲信号,失锁 [ 图 3 1P P S仿真波形 两个脉 冲间的局部放 大图——延 时 2 n 0s 情况下 3 P S 2 P 信号丢失, 得到—个不存在缺损的 为中 控 T n ,另一路为我们的待 稳定的北斗 1P 信号。 P A部分算法由四个 3 制系统至卫星的距离时延 以及该路径对流层和电 与 U C时均方误差小于 7 s PS FG 2 由中心控制系统精确算得日 。 测的北斗 1 P 信号 , PS 将测试没定为 1 —T 状态, 、 1 D 位计数器组成( 如图 1 , ) 这四个计数器分别是秒间 离层折射修正值, t 控制中 1 系统的设备零值 ,在导航数据 1 小时长期加电测试 , 1 , 2 每隔一小时观测差值 , 差值 隔计数器、 秒信号输出计数器、 帧计数器、 帧间隔 分布如图 4 所示。 计数器。秒间隔计数器用来补偿本地时钟不准确 电文中得到; t 卫星到用户机的传输时延 ,可以根据导 5结论 所造成的 误差。帧间隔计数器用来记录两个相邻 基于 F G + S 的秒信号精确秒授时信号 PA DP 3P S 2 P 信号的时间间隔。s _ p s e lp 信号由 D P t S 置 航 电文结算用户位置和导航电文中卫星的运行参 数计算得到目 : 设计方案, 实现在弱电磁环境授时 、 守时功能 , 该 数, 用于时延设定和秒头的寻找 。 T 卫星到用户机的对流层、 电离层时延, 根 硬件算法在 M dl m下 实现仿 真 ,在 F G oe i s P A+ 秒信号输出计数器的输入端分别是 5 M时 0 S 完成精确北斗秒信号实现 , 通过 钟信号 , 最大计数值输入信号、 置数值输入 、 置数 据 电离参数模型可以计算得到。参数在卫星下发 D P的接收机 匕 1P P S的硬件时序图 的导航电文中可以得到; 1 小时长时间测试观察 , 1P 信号输出的与 2 该 PS T 地球 自 转引起的时延目 由 , 下式算得: 可 GS P 标准时间信号源的时间间隔 ≤10 n , 0 0 s 满足 如图 1 不。 所 f ∞x-X C f y ) ̄ Y / 大部分晴况下授时需求。 2F G 算法仿真结果 P A 其中 ∞为地球旋转角速度 ,, () x 为用户设备 y 参考文献 根据上述 F G P A算法的介绍 ,在 M dl m oe i s 。 C 1 】 李涛. 实用 G S 时系统设计叨西 安 一种 P授 上仿真算法的可行性, 必须先编写测试激励代码, 所响应的卫星位置坐标 ,( 为用户位置坐标 , [徐进 , 单位为 n 。 s 工程科技学院学报, 0 72()8 0 8 3 2 0 ,1 : -4 . 6 4 激励要满足实际的信号格式和实际晴况 ,由于在 为光速, T 用户机的 设备零值 , 可以在北斗一号用 『王卿, 2 ] 宋铁成, 基于 G S技术进行精确授时 奉媛. P 弱的电磁环境下 , P S 3 P 信号会经常丢失, 2 信号失 的方法叨 电气电子教学学抿 2 0 , ( : _ 8 . 0 72 4 3 3. 9) 4 锁, 在一段时间后又重新锁定, 得到—个不连续的 户机入网测试系统上测 出。 当首次获得帧号为 1 stlp 置数 , 时,e p s 对各 [董剑利, 3 ] 周丹._3G S授 时同步监控 系统的设 ih P ¥ 3P S 2 P 信号。通过这样 的激励作为仿真的输人对 算法代码进行前仿真。由于仿真 1 秒等待时间过 计数器清零 , 使秒信号的秒头在 同一位置 , 时延计 计与实现 叨 计算机 工程 与设计2 0 ,8( ) . 0 72 1 : 2 长, 显示结果不够直观 , 我们将参数改成生产 l s 算后加入 , m 从而得到与北斗秒对齐的秒脉冲信号。 3 0 - 0 7 0 6 30 . 4系统对星测试结果 郑伟平. 北斗接收机的部分算法与定位误差研究 间 隔 的信 号 ,得 到 的仿 真结 果 如 图 2所示 。 on e PP S b 是用来参考对 比的秒信号 , P s 基于上述算法 , 我们在 D P F G S + P A的系统平 【 . 尔 D 哈 滨工业大学 J 硕士学位论文' 0 ( : 一 2 6 2 1 0 ) 8 z o P n
国产化芯片双北斗主备时钟装置与对时技术的研究及应用

国产化芯片双北斗主备时钟装置与对时技术的研究及应用本文将围绕“国产化芯片双北斗主备时钟装置与对时技术的研究及应用”展开阐述,下面将从以下几个方面进行阐述。
一、研究背景随着北斗卫星导航系统的不断完善,其在民用领域的应用也越来越广泛,同时也带来了对精准时钟技术的需求。
然而,由于外国芯片技术存在着一定的安全风险,因此加强国产化芯片的研发显得十分重要。
在这种背景下,国产化芯片双北斗主备时钟装置与对时技术应运而生。
二、研究内容该研究主要从以下两个方面展开:1. 国产化芯片双北斗主备时钟装置在开展该研究之前,研究者首先对国内外市场上已有的双模卫星时钟进行了分析,然后在此基础上进行自主创新。
研究者采用了DDM(Dual Dilution Microwave)技术,通过双频输入、信号混频、数字处理等多种技术手段,设计出了一套媲美国际同类产品的、高稳定性、高精度的双北斗主备时钟装置。
2. 对时技术在双北斗主备时钟装置研制成功之后,研究者在对其性能进行测试的基础上,针对其对时精度进行了优化。
据测试,该装置的对时精度已经达到了1ns级。
由于当前国内对于1ns以下精度的时钟测试机还处于空白状态,因此该研究具备较强的市场竞争力。
三、应用前景国产化芯片双北斗主备时钟装置与对时技术的推广有望带动国内芯片技术的发展,同时也将为民间高精度测量、高精度控制等领域提供有力的支持。
预计该研究成果在未来的应用前景十分广阔。
综上所述,国产化芯片双北斗主备时钟装置与对时技术的研究具有十分重要的现实意义和科学价值,能有效提高国内精密定位及对时行业的技术实力和市场竞争力。
一款北斗/GPS双模定位模块设计与实现
一款北斗/GPS双模定位模块设计与实现潘未庄;陈石平;牛明超【摘要】A precept for BeiDou/GPS navigation module based on core chips with inde-pendent intellectual property rights,is present.By adopting high-high integrated RF chip and low-power navigation baseband chip,the module receives GPS L1 and BD2 B1 signal simultaneously,providding high precision in position,speed-measurement and timing.BeiD-ou/GPS module is totally compatible with other GPS modules and more suitable for vehicle-based application.%提出一款以自主知识产权芯片为核心的北斗/GPS定位模块方案,采用高集成度的射频芯片和低功耗的导航基带处理器,能同时接收北斗和GPS信号,实现高精度定位、测速和授时,全面兼容GPS模块,非常适合民用导航应用环境。
【期刊名称】《全球定位系统》【年(卷),期】2014(000)002【总页数】4页(P34-37)【关键词】北斗/GPS;双模定位;导航模块【作者】潘未庄;陈石平;牛明超【作者单位】广州海格通信集团股份有限公司,广东广州 510656;广州海格通信集团股份有限公司,广东广州 510656;广州海格通信集团股份有限公司,广东广州 510656【正文语种】中文【中图分类】P228.40 引言2012年12月27日中国政府向全球宣布,北斗卫星导航系统(BDS)即日起正式向亚太地区免费提供高质量全天候的导航、定位、授时和测速服务[1]。
《基于S3C2410的北斗卫星定位终端的设计与实现》范文
《基于S3C2410的北斗卫星定位终端的设计与实现》篇一一、引言随着科技的飞速发展,卫星定位技术在人们的日常生活中扮演着越来越重要的角色。
北斗卫星定位系统作为我国自主研发的全球卫星导航系统,其应用领域日益广泛。
S3C2410作为一种常用的嵌入式处理器,具有高性能、低功耗等优点,非常适合用于北斗卫星定位终端的设计。
本文将详细介绍基于S3C2410的北斗卫星定位终端的设计与实现过程。
二、系统设计1. 硬件设计系统硬件设计主要包括S3C2410处理器、北斗卫星接收模块、电源模块、存储模块等。
S3C2410处理器作为核心部件,负责整个系统的控制与数据处理。
北斗卫星接收模块用于接收卫星信号,是定位的关键部分。
电源模块为整个系统提供稳定的电源保障,存储模块则用于存储定位数据和系统参数。
2. 软件设计软件设计包括操作系统、驱动程序、应用程序等。
操作系统采用嵌入式Linux,具有较好的稳定性和兼容性。
驱动程序负责与硬件设备进行通信,实现数据的读取和写入。
应用程序则是用户与系统交互的接口,包括定位、导航、数据传输等功能。
三、关键技术实现1. 卫星信号接收与处理北斗卫星定位终端的核心是卫星信号的接收与处理。
通过S3C2410处理器的GPS模块,实时接收北斗卫星信号,并进行数据处理,最终实现定位。
在信号处理过程中,需要采用滤波、解调等技术,以提高信号的信噪比和准确性。
2. 数据传输与存储数据传输与存储是北斗卫星定位终端的重要功能之一。
通过无线通信技术,将定位数据传输至服务器或手机等设备。
同时,系统还需要具备本地存储功能,以便在无网络环境下保存定位数据。
在数据传输过程中,需要保证数据的可靠性和安全性。
四、实验与测试为了验证基于S3C2410的北斗卫星定位终端的设计与实现效果,我们进行了大量的实验与测试。
实验结果表明,该终端具有良好的定位精度和稳定性,能够实时接收和处理北斗卫星信号,实现快速定位。
同时,该终端还具有较低的功耗和较高的可靠性,满足了实际应用的需求。
国内首个北斗三号全芯片解决方案发布

《科技传播》2019·5(下)199科学普及实践(4):19.[2]杜闻远.需要对写作下苦功夫——学习邹韬奋勤于写作的优良作风[J].新闻战线,1962(1):14-15.[3]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:639.[4]傅璇琮.《我和古籍整理出版工作》[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:642.[5]傅璇琮.闻一多与唐诗研究[M]//治学清历.北京:首都师范大学出版社,2010:363.[6]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:645.[7]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:647.[8]傅璇琮.黄庭坚和江西诗派资料汇编[M].北京:中华书局,1978:1004-1005.[9]傅璇琮.学术理性的启示[M]//濡沫集.北京联合出版公司,1997:29.[10]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:647.[11]傅璇琮.编辑与学届之情谊——编辑工作掇议[M]//治学清历.北京:首都师范大学出版社,2010:346.[12]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他.郑州:大象出版社,2004:649.[13]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他,郑州:大象出版社,2004:645.[14]罗宗强.唐诗论学丛稿·序[M].唐诗论学丛稿,北京:京华出版社,1999:1.[15]傅璇琮.传统研究与当代意识——陈良运《周易与中国文学序》[J].文史哲,1999(4):8.[16]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他,郑州:大象出版社,2004:650.[17]傅璇琮.治学清历·序[M].北京:首都师范大学出版社,2010:22.[18]傅璇琮.学术理性的启示[M].濡沫集,北京:北京联合出版公司,1997:3.[19]张剑.傅璇琮:只为学界办实事[N].光明日报,2016-12-29(06).[20]张剑.傅璇琮:只为学界办实事[N].光明日报,2016-12-29(06).[21]罗容海.那一面大纛永远高悬——《傅璇琮先生纪念集》书里书外[N].光明日报,2017-5-4(16).[22]张剑.傅璇琮:只为学界办实事[N].光明日报,2016-12-29(06).[23]邹韬奋,聂震宁.能与为[M].转到光明去,上海:上海交通大学出版社,2017:179.[24]傅璇琮.我和古籍整理出版工作[M]//唐宋文史论丛及其他,郑州:大象出版社,2004:646.国内首个北斗三号全芯片解决方案发布5月22日,在第十届中国卫星导航年会上,广州海格通信集团发布了国内首个支持北斗三号应用的基带+射频全芯片解决方案。
北斗卫星授时接收机的设计与实现

北斗卫星授时接收机的设计与实现徐宁波【摘要】针对北斗卫星导航系统的时钟高稳特性,研究了高精度、低成本授时接收机的设计和实现方法.介绍了授时接收机从北斗卫星提取授时时标的设计方案,对方案中各部分做了功能分析.对产生授时时标中的关键环节、本地时钟的选择、本地时钟钟差的处理、卫星位置偏差的处理和授时时标合成策略进行了阐述.给出了授时系统的测试方法,分析了性能指标,测试结果表明能够达到优于100 ns (1σ)的授时精度.【期刊名称】《无线电工程》【年(卷),期】2010(040)010【总页数】3页(P38-39,61)【关键词】授时时标;本地钟差;卫星星历【作者】徐宁波【作者单位】武汉大学,测绘学院,湖北,武汉,430079;远东华强导航定位有限公司,河北,石家庄,050081【正文语种】中文【中图分类】TN850 引言时间和频率与人类的生活越来越息息相关,对国民经济建设和发展起着重要作用。
随着北斗一号卫星导航系统日趋成熟,基于该系统的授时应用也越来越得到人们的关注。
基于卫星信号传递时间的方法一般有2种:①卫星共视法,地面上距离很远的2台或几台时钟进行比较而实现同步;②载波相位法,通过计算2台接收机与卫星之间的几何距离得到时间信息。
针对简单便捷应用的授时,前2种方法虽然精度更高,但设计复杂需要多台接收机同时工作以互相比对提取时间信息,而且地域性受到制约不利于授时接收机的普遍应用。
因而提出了应用单颗卫星采用位置保持模式授时的方法,并在实践中得到验证。
1 授时接收机设计方案1.1 授时接收机的组成授时型接收机是在卫星接收机的基础上添加了授时模块。
授时模块主要由本地钟、时刻比对、钟差计算、秒脉冲(1pps)合成和秒脉冲(1pps)合成控制等部分组成,如图1所示。
从硬件实现上包括可编程逻辑器件(FPGA)和处理器(DSP)两部分,通过相互配合来完成授时时标的输出,其中钟差计算和1pps合成控制在DSP中实现,其他部分在FPGA内部实现。
提高产品成熟度以加强外协管控

常跃东1王国军1保石1陈丹1于新刚2(1.中国空间技术研究院载人航天总体部,北京100094;2.中国空间技术研究院北京空间飞行器总体设计部,北京100094)摘要通过载人航天工程二步一阶段的成功飞行试验验证,载人飞船产品的设计质量得到不断提高,任务需求已经转变为天地往返的应用性飞行㊂在神舟十一号单机研制过程中,重点关注外协产品的 产品制造工艺成熟程度 和 产品过程控制成熟程度 ,加强精细化管控措施的落实,不断提炼提高神舟系列飞船产品成熟度的经验,以适应后续空间站阶段载人飞船产品批量化生产的需求㊂关键词载人飞船外协管控产品成熟度引言随着无人交会对接和有人交会对接任务的接连成功,载人飞船的任务需求已经转变为天地往返的应用性飞行,任务性质从科研试验任务为主向应用服务任务为主转变㊂空间站建造和运营阶段载人飞船高密度发射的任务需求,对平台产品,特别是外协产品的质量稳定性和可靠性提出了更高的要求㊂随着载人航天工程二步一阶段的成功实施,产品的设计质量得到不断提高,设计人员的能力水平不断增强㊂但分析研制过程中发生的质量问题,绝大部分问题产品均为外协方面的问题[1],工艺问题和过程控制方面的问题比重较大㊂在神舟十一号单机研制过程中,重点关注外协产品的 产品设计成熟程度 ㊁ 产品制造工艺成熟程度 和 产品过程控制成熟程度 [1],不断加强精细化管控措施的落实,通过神舟十一号飞船产品的研制,不断提升神舟系列飞船的成熟度,以适应后续空间站阶段批量化生产的需要㊂本文主要介绍从提升制造工艺和过程控制成熟程度方面来加强外协管控的经验㊂1产品成熟度的度量依据从高质量㊁高可靠的要求出发,航天产品成熟度是对产品固有质量㊁可靠性和可应用程度的综合度量㊂应用相对成熟的产品,意味着较低的风险㊂按照决定产品成熟程度的设计㊁工艺和过程控制3大关键特性,产品成熟度的基本度量要素应包括产品设计成熟程度㊁产品制造工艺成熟程度和产品过程控制成熟程度3个方面㊂产品成熟度等级的评定可按以下模型进行:PML=A DðD.A MðM.A PðP式中,PML(Product Maturity Level)-产品成熟度;D(Design)-产品设计成熟程度;M (Manufacture Technics)-产品工艺成熟程度;P(Process Control)-产品过程控制成熟程度[2]㊂中国航天企业自2003年开始提出产品成熟度的概念,2009年将单机产品成熟度划分为8个等级[3],其中1~4级产品处于产品初次研制阶段,主要开展原理样机㊁工程样机和飞行产品的研制,5级产品是经过多次飞行,能够在轨稳定运行的成熟产品,在此基础上可以逐步申报三级㊁二级㊁一级定型产品,分别对应成熟度等级图1产品成熟度提升的途径的6㊁7㊁8级㊂目前北斗导航系列产品作为批产卫星研制的代表,已经开始将产品成熟度的提升理念应用到卫星研制工作中[4]㊂按照航天单机产品成熟度等级划分和定义的规定,神舟飞船90%以上的单机产品成熟度为 5级多次飞行考核产品 ,处于 重复生产和使用 阶段,表明单机产品的设计满足载人飞船在轨的任务需求㊂在神舟十一号单机研制过程中,重点关注产品成熟度的提升工作,不断加强精细化管控措施的落实㊂通过神舟十一号飞船产品的研制,不断提升神舟系列飞船的产品成熟度,为后续神舟飞船产品的定型工作和产品成熟度提升打下基础,并适应后续空间站阶段批量化生产的需要㊂2提高产品成熟度途径通过成功实施载人航天工程二步一阶段的任务,载人飞船单机产品的设计成熟度不断得到提升㊂对后续外协产品的成熟度提升工作,重点是确保 不同时间㊁不同地点㊁不同人员生产出的产品的一致性程度,并在产品研制中达到 可操作㊁可量化㊁可检测㊁可重复 ㊂在外协产品交付前,通过加强生产准备㊁交付前的单机可靠性测试㊁走查㊁培训和风险分析等多种手段来强化关键环节控制,通过固化生产操作流程,加强数据包络分析,完善风险管控薄弱环节的控制措施等方法来提高产品研制中的工艺和过程控制成熟度㊂产品成熟度提升的途径如图1所示㊂3持续外协管控,提升产品成熟度自神舟十一号产品投产开始,载人飞船系统就始终关注外协管控,组织对外协单位进行走访,在单机研制交付前多次组织召开质量分析会,不断提醒全系统研制队伍,落实好各项质量管控措施,抓好单机研制阶段各项控制措施的落实,做好数据比对和判读,做好包络分析,对于超包络数据做好影响分析,不放过任何问题隐患,及时固化前10次飞行任务中的宝贵经验,不断提高工艺制造成熟度和过程控制成熟度,确保飞行产品质量㊂3.1提前策划,强化关口前移,夯实质量基础科学干㊁提前抓 ,组织各承制单位提前开始产品投产,明确元器件等物资的齐套计划㊂针对重点问题,项目办积极介入协调,提前制定设备交付计划,为总装工作顺利开展积极创造条件㊂组织各分系统单位深入设备生产一线,检查设备投产情况,宣讲总体和分系统的产品保证要求和其它质量管控措施的规定,提前发现问题,确保设备交付质量㊂按照 推动从事后管理向预防控制转变 的思路和原则,强化关口前移,夯实质量基础,总结二步一阶段研制中的经验和教训,加强单机交付前的可靠性测试,按照可靠性理论中的 浴盆定律 ,参考航天器产品可靠性保证要求中 可靠性研制试验/增长试验 的相关内容,根据进一步加强单机交付前的考核㊁加强装船设备备机的测试充分性的要求,质量管控前移,提前暴露质量问题㊂总体从历史问题类别㊁问题时间㊁问题预防等几方面对载人航天工程二步一阶段的质量问题进行了全面总结梳理,评估了测试流程和测试用例的效果,总结了经验教训㊂总体根据总结梳理结果下发了单机可靠性测试的要求,在要求单机考核时间的同时,从对外接口测试㊁控制器测试㊁测试条件㊁冗余备份㊁活动部件5个方面细化要求了单机可靠性的测试项目,要求单机在完成可靠性测试后方可交付总体验收,减少装船后发生质量问题的风险㊂3.2扎实开展关键外协单位的过程检查,待办事项逐一闭环落实并检查确认到位将以往在软件落焊期间进行的检查工作提前至单机合盖前进行,按照通用产品保证要求,对单机研制过程各项产品保证工作措施的落实情况进行全要素的检查和确认,全面推进中国空间技术研究院院长五号令,宣贯总体和分系统的产品保证要求,检查单机单位产品保证工作策划的情况,组织新时代审核员㊁研究院工艺专家和元器件专家重点对单机生产现场防静电㊁多余物控制措施和落实情况进行检查,对单机外协控制的薄弱环节进行分析确认,对生产准备情况㊁生产过程控制记录㊁禁(限)用工艺㊁印制板供电间隙等满足要求的情况进行检查㊂对检查中发现的问题与责任单位,进行逐项确认并提出明确的整改建议,对整改落实情况进行 一对一 ㊁ 面对面 ㊁ 多回合 的闭环确认,确保产品交付前所有待办事项落实到位,帮助外协单位不断提高制造工艺成熟程度和过程控制成熟程度,确保交付产品质量㊂3.3积极开展外协单位的产品保证培训,提升外协单位产品保证能力为落实研究院关于加强外协质量管理的若干要求,提升外协单位产品保证能力,飞船系统又组织完成了对部组件的产品保证工作培训㊂这是飞船系统在组织完成走查后,又将外协管控触角进一步延伸到部组件外协厂家,将外协单位产品保证培训作为外协管控的又一重要手段,确保外协管控做细做实㊂飞船系统高度重视对外协部组件研制单位的培训活动,精心组织,针对外协单位产品研制的特点,结合院长五号令的相关内容及相关案例分析,由飞船系统产品保证经理编制了培训教材,并就外协单位产品保证能力建设㊁强制/关键检验点控制㊁三类关键特性的识别和控制㊁生产过程控制管控等方面与外协厂家进行了深入的交流,进一步加强外协单位对航天产品保证方面的深刻认识和理解,切实达到单机产品持续改进的目的㊂培训取得了良好的效果,飞船系统将在后续的工作中,不断加强对外协单位特别是二次外协单位产品保证要求的沟通与交流,将走查和培训等多种手段作为加强外协管控的有效措施,进一步加强外协单位质量管控意识,通过外协单位自身产品保证能力的持续提升,确保飞行产品的质量与可靠性㊂3.4重点关注外协重大技术状态更改,作为技术风险项目进行管理在设备投产准备时,飞船系统积极组织梳理器件和材料由于禁运㊁停产或是其它原因导致的技术状态更改项目,对于返回舱防热结构玻璃微球代料㊁总线芯片国产化更改㊁太阳电池翼基板代料等影响任务实施的重大更改,严格按照中国航天科技集团公司有关风险分析和控制要求的规定,从设计层面开展了技术风险分析与控制工作策划,制定了风险控制措施,作为系统级技术风险进行管理,并在产品保证计划中明确了技术风险管控的相关负责人和完成计划,确保风险管控措施落实检查确认到位㊂同时将外协管理纳入到风险管理的范畴,结合神舟十一号飞船技术状态基线的确定工作,关注承制单位的改变,重点是产品外协单位㊁工序外协单位和试验外协单位的改变,明确按照集团公司标准‘航天产品技术状态更改控制要求“进行管理㊂对环控和热控分系统部分软管加工外协单位的变化,组织进行系统级技术状态更改评审,邀请质量监督代表㊁外协单位的技术负责人参加评审会,真正做到技术交底,质量管控水平不降低,消除软管加工单位变化引入的风险㊂3.5加强低层次人为质量问题的通报,警示全系统研制队伍狠抓质量问题背后的深层次技术和管理因素,所有质量问题均要求进行系统级的技术和管理双归零,在确保质量问题定位和机理分析清楚的前提下,组织问题责任单位深挖问题背后技术和管理的薄弱环节,促使外协单位修炼内功吃透技术;并努力消除二次外协管控的真空地带,通过设置强制/关键检验点,加强对二次外协的技术管理,提高二次外协的技术透明度㊂剖析神舟十一号载人飞船单机研制阶段质量问题背后的深层次原因,一方面反映外协单(上接第26页)和规范产品工艺设计和开发的全过程㊂5)要做好并保持好工艺设计和开发过程中的记录和标识,保持良好的可追溯性;针对各阶段工艺设计和开发过程中出现的问题,要进行梳理㊁统计㊁分析,并进行追溯㊁跟踪㊁改进㊁落实㊂6)策划时要充分辨识工艺设计和开发过程中的各项风险,梳理形成关键工艺和关键控制点,组织开展工艺技术攻关㊂7)各阶段的设计评审㊁设计验证㊁设计确认要严格落实,避免走过场,评审时要重点对工艺设计和开发过程的结果,在可操作性㊁有效性㊁经济性㊁稳定性等方面进行评价㊂8)工艺设计和开发过程中要充分考虑到对以往成熟㊁稳定工艺设计的继承性,同时也要根据自身产品特点,关注和控制好继承性工艺的差异性㊂9)对于复杂的工艺装备㊁新工艺装备以及状态有重大更改的工艺装备,也要按产品实现工艺过程要求进行工艺设计和开发过程的策划㊁实施和控制㊂5结束语正确认识和理解把握GJB9001B有关 设计和开发 的内涵及要求,建立和加强航天产品制造工艺设计和开发过程的策划㊁实施和控制,有利于强健企业质量管理体系建设,全面推进企业质量管理能力的提升,这不仅是航天企业自身发展的需求,更是航天企业整体制造工艺水平快速发展和持续提升的重要基础,并最终实现生产出符合设计要求和满足顾客需求的高质量产品的质量目标㊂参考文献[1]GJB9001B-2009质量管理体系要求[S].位在吃透技术上还存在较大差距,另一方面也反映出个别研制单位管理存在薄弱环节和个别研制人员能力与思想状态与载人航天的要求存在较大差距㊂为进一步警示全系统,强化全体研制人员质量意识,飞船系统多次组织召开分系统主任设计师参加的专题质量分析会,对近期出现的质量问题进行通报和深入分析,切实加强研制队伍的质量意识和危机意识,进一步统一思想㊁提高认识,加大抓质量㊁促进度㊁保成功的力度㊂对于由于个别研制人员思想麻痹㊁质量意识淡薄㊁有章不循㊁有法不依造成的低层次人为质量问题,飞船系统加大惩处力度,在全系统范围内进行通报,引起全体研制人员的进一步深思和警惕,引以为戒,吸取教训,在全系统研制队伍中树立 大质量 观,严格对标,形成对标准的敬畏心,确保飞行产品各项质量管控措施落到实处㊂4结束语根据载人飞船继承性较强的特点,固化外协单位产品研制中工艺成熟度和过程控制成熟度的方法,加强质量责任的落实,发动更多的分系统单位开展检查工作,明确产品研制中的各项要求和在轨使用环境,进一步吃透技术,促进共同进步㊂同时不断充实和完善专用产品保证要求,强化管控的手段,促进产品保证A+B+C (A-ISO9001体系基本要求,适用于所有产品;B-军工产品特殊要求,A+B即GJB9001B;C-宇航产品特殊要求,重点体现在宇航产品保证要求和 22条 有关要求)的不断深入,加强总体技术积累和总体把控能力,不断完善外协管控的方法,持续不断地推进外协管理各项规定的落实㊂参考文献[1]孙涛,李辉,王涛,等.适用航天器研制特点的外协质量管理实践[J].质量与可靠性,2013(1):41-43.[2]袁家军.航天产品成熟度研究[J].航天器工程,2011(1):1-7.[3]袁家军.航天产品工程[M].中国宇航出版社,2011:35-43.[4]肖刚,姜万杰,吴振宇,等.产品成熟度提升及其在批产卫星研制中的应用[J].航天器工程,2011(1):142-145.提高产品成熟度以加强外协管控作者:常跃东, 王国军, 保石, 陈丹, 于新刚作者单位:常跃东,王国军,保石,陈丹(中国空间技术研究院 载人航天总体部,北京,100094), 于新刚(中国空间技术研究院 北京空间飞行器总体设计部,北京,100094)刊名:质量与可靠性英文刊名:Quality and Reliability年,卷(期):2015(2)1.孙涛,李辉,王涛,王进军适应航天器研制特点的外协质量管理实践[期刊论文]-质量与可靠性 2013(1)2.袁家军航天产品成熟度研究[期刊论文]-航天器工程 2011(1)3.袁家军航天产品工程 20114.肖刚,姜万杰,吴振宇,董方成,张洪波产品成熟度提升及其在批产卫星研制中的应用[期刊论文]-航天器工程 2013(5)引用本文格式:常跃东.王国军.保石.陈丹.于新刚提高产品成熟度以加强外协管控[期刊论文]-质量与可靠性 2015(2)。
中国北斗系统研制揭秘
中国北斗系统研制揭秘2010年1月16日下午,星箭在发射前进行测试。
2010年11月16日,第八届中国国际航空航天博览会在广东珠海市开幕,代表“北斗导航”工程的天地一体卫星运行沙盘在展会上亮相。
2010年12月17日,第7颗北斗导航卫星发射前的星箭对接。
12月18日,第7颗北斗导航卫星成功进入太空。
北斗记——探秘中国北斗卫星导航定位系统约四十年前,美国军方开始了被称作“全球定位系统”(GPS)的研制。
现在,在我们头顶上空约2万公里处的中地球轨道,GPS系统部署了24颗卫星,地面站对这些卫星的信息数据进行捕捉、处理、解码,并将有关信息发至用户终端机——这样,GPS给全球提供准确的定位、测速和高精度的时间标准。
如今,GPS在我们生活中已然不可或缺——飞机、汽车、船舶用它来导航;公安、金融、消防部门用它来监控、报警;而不少路痴朋友们驾车出行,也往往得有它来壮胆伴行……在GPS占领95%中国卫星导航定位市场的今天,一种想象不免令人时常不安——假如在关键时刻美国人关掉GPS,或者在上面“动点手脚”,我们的战略武器怎么办?我们的飞机怎么办?我们的路痴们怎么办?事实上,这已经不只是想象与担心,而是已有先例可循——1996年台湾海峡局势紧张的时候,中国军队的一次大规模军事演习便曾受到过GPS信号中断的干扰。
基于上述担心,世界各大国与国家集团开始考虑对策,由此诞生了俄罗斯的格洛纳斯、欧盟的伽利略等等卫星导航定位系统。
从上世纪80年代末开始,未雨绸缪的中国科学家们也开始致力于研制中国自己的“GPS”。
当时,经济基础薄弱的中国,太空梦想还很微小和低调。
这个被命名为“北斗”的计划,诞生之初并未着眼于全球。
最初,中国科学家陈芳允提出了与GPS不同的双星定位理论,用以解决在资金困难时期构建宏大系统的难题。
北斗这一宏伟计划,就这样在总参测绘局招待所三层一间狭小的办公室里悄悄开始了。
凭着中国人探索精神与务实态度,北斗计划历经周折,厚积薄发,终于,在2000年,第一颗北斗试验卫星得以发射进入太空轨道。
卫星导航芯片研发制造方案(二)
卫星导航芯片研发制造方案一、实施背景随着中国高科技产业的快速发展,卫星导航技术已经成为国家基础设施和安全的重要组成部分。
然而,当前我国在卫星导航芯片研发制造领域仍存在诸多短板,如芯片自主化程度低、国产化率不足等。
为了推动产业结构改革,提高卫星导航技术的核心竞争力,我国亟需加强卫星导航芯片的自主研发与制造能力。
二、工作原理卫星导航芯片的工作原理基于全球定位系统(GPS)和北斗卫星导航系统(BDS)的信号接收与处理。
通过接收卫星发射的信号,芯片能够获取位置、速度和时间等信息,从而实现精确定位与导航功能。
芯片内部包括射频模块、基带模块、数据处理模块等,各模块协同工作,最终将解析后的位置、速度和时间信息输出给用户。
三、实施计划步骤1.设立研发团队:建立具备丰富经验和专业知识的研发团队,负责芯片的研发与优化。
2.技术研究:开展与卫星导航芯片相关的技术预研,包括射频技术、基带技术、数据处理算法等。
3.硬件设计:根据技术预研结果,进行芯片的硬件设计,包括芯片架构、电路设计、版图绘制等。
4.软件编程:基于硬件设计,进行芯片的软件编程,包括驱动程序、操作系统、应用软件等。
5.测试与验证:对研发出的芯片进行严格的测试与验证,确保其性能满足设计要求。
6.产业化推广:将通过测试验证的芯片投入量产,并在各领域进行推广应用。
四、适用范围本方案适用于国家基础设施、智能交通、航空航天、军事应用等领域。
特别是在智能驾驶、无人机、精确制导武器等领域,卫星导航芯片具有广泛的应用前景。
五、创新要点1.自主研发:通过自主研发,实现卫星导航芯片的国产化,打破国外技术垄断。
2.多模态融合:将北斗卫星导航系统与GPS、GLONASS等其他全球卫星导航系统进行融合,提高定位精度和可用性。
3.低功耗设计:采用先进的低功耗技术,降低芯片功耗,延长设备续航时间。
4.高性能处理:利用高性能处理器和算法,提高芯片数据处理能力,实现实时高精度导航。
5.嵌入式软件:采用嵌入式操作系统和应用程序,提高芯片的可靠性和安全性。
《基于嵌入式系统的北斗-GPS-SINS组合导航系统设计与实现》范文
《基于嵌入式系统的北斗-GPS-SINS组合导航系统设计与实现》篇一基于嵌入式系统的北斗-GPS-SINS组合导航系统设计与实现一、引言随着科技的不断发展,导航技术在各行各业中的应用日益广泛。
作为现代社会的重要技术手段,导航系统的设计不仅涉及到多学科的知识融合,而且其实现过程的复杂性和精细度也在不断提升。
在众多的导航系统中,北斗/GPS/SINS(北斗卫星导航系统、全球定位系统、捷联式惯性测量系统)组合导航系统凭借其独特的优势和良好的互补性,逐渐成为了众多应用领域的首选。
本文将就基于嵌入式系统的北斗/GPS/SINS组合导航系统的设计与实现进行深入探讨。
二、系统设计概述(一)设计目标本系统设计的主要目标是实现北斗/GPS/SINS的组合导航,提高导航的精度和可靠性,满足各种复杂环境下的导航需求。
通过嵌入式系统的开发,将组合导航系统应用于各类设备中,实现高效、精准的定位和导航。
(二)设计原理本系统设计基于嵌入式系统技术,结合北斗/GPS/SINS的各自优势,通过数据融合算法实现组合导航。
其中,北斗和GPS提供全球定位信息,SINS提供高精度的姿态和速度信息,三者之间的数据通过算法进行融合,从而得到更准确、更稳定的导航信息。
三、系统硬件设计(一)处理器选择系统硬件的核心是处理器,本系统选择高性能的嵌入式处理器,具备强大的数据处理能力和良好的功耗控制能力。
(二)模块设计系统硬件包括北斗/GPS接收模块、SINS测量模块、数据传输模块等。
其中,北斗/GPS接收模块负责接收卫星信号并转换为数字信号;SINS测量模块负责测量姿态和速度信息;数据传输模块负责将处理后的数据传输给上位机或其它设备。
四、系统软件设计(一)操作系统选择本系统选择适用于嵌入式系统的实时操作系统,以保证系统的稳定性和实时性。
(二)软件开发环境搭建为方便开发,搭建了包括编译器、调试器等在内的软件开发环境。
同时,为保证软件的兼容性和可移植性,采用模块化设计方法进行软件开发。
北斗闪耀中国芯r—— 航天772所元器件国产化攻关纪实
北斗闪耀中国芯r——航天772所元器件国产化攻关纪实文宣;雷霏【期刊名称】《卫星应用》【年(卷),期】2015(000)012【总页数】2页(P77-78)【作者】文宣;雷霏【作者单位】【正文语种】中文这是重要的突破。
2015年7月25日,西昌卫星发射中心顺利升空两颗新一代北斗导航卫星,远征一号上面级将2颗卫星准确送入预定轨道。
卫星和上面级100%使用航天772所研制生产的国产CPU(微处理器)芯片。
除了CPU,北斗双星和上面级上的数据总线电路、转换器、存储器等近40款产品均为航天772所研制和生产,这是中国卫星首次成体系的、批量使用国产芯片,对航天工程的自主可控和创新发展具有里程碑式意义。
信息安全是一个国家的战略问题,信息安全的硬件支撑依靠的是核心芯片。
卫星导航系统是重要的空间信息基础设施,我国高度重视卫星导航系统的建设,“北斗”一直在努力探索和发展具有自主知识产权的卫星导航系统。
支撑新一代北斗卫星导航系统这一空间信息基础设施的核心元器件至关重要。
宇航上应用的芯片,要具有抗辐射等特殊性能,这对于卫星长寿命、高可靠稳定运行具有至关重要的作用。
北斗卫星要实现大规模组网,更需要能有保障其长期稳定运行的宇航用高端芯片。
航天772所成立于1994年,主要研制生产宇航用高端芯片。
空间是个极其复杂的环境,因为空间恶劣辐射环境的影响,导致星上电路性能甚至整个电路失效,从而对卫星造成“致命”打击已是“家常便饭”。
给电路穿上厚厚的“外衣”,会导致器件增重;改变制造工艺实现抗辐射需求,会造成投入巨大。
集成电路抗辐射加固技术已成为世界航天的核心共性基础技术,各国航天科学家都在苦苦探索,怎样才能低成本地拿出抗辐射加固芯片。
针对空间恶劣辐射环境,772所从1998年开始,以抗辐射加固设计技术为突破,开创性走出了采用设计加固方法进行抗辐射加固集成电路研制的技术路线。
这是一个先进、便利而又未增加成本的技术发展思路:利用普通集成电路制造生产线,不改变其工艺流程和规范,在设计前端通过对器件、电路和系统的设计加固,在设计环节而非制造环节实现抗辐射特性,研制出“抗辐射加固”的宇航集成电路,从而为我国宇航用高端集成电路实现自主可控奠定了技术基础。
基于北斗兼容型多模卫星导航芯片的设计与实现
基于北斗兼容型多模卫星导航芯片的设计与实现导语:随着全球定位系统(GPS)在各行各业的广泛应用,对卫星导航的需求越来越迫切。
而在中国,北斗导航系统已经逐渐展示其强大的潜力和巨大的市场前景。
基于北斗兼容型多模卫星导航芯片的设计与实现成为了一个重要而具有挑战性的任务。
本文将探讨该任务的内容需求及具体实现方法。
一、任务的内容需求1. 卫星导航芯片的设计a. 具备北斗兼容性,能够支持北斗导航系统的信号接收与解析。
b. 具备多模能力,能够兼容并支持其他导航系统的信号接收与解析。
c. 提供高精度的定位、导航和时钟同步功能。
d. 具备快速冷启动和高灵敏度,以适应各种环境下的使用需求。
2. 卫星导航芯片的实现a. 电路设计:设计高性能的前端收发电路,包括射频放大、混频、均衡、判决等功能。
b. 芯片架构:采用先进的数字信号处理技术,实现导航信号的接收、解码和定位算法。
c. 抗干扰设计:考虑多路径效应、多用户干扰等因素,提高信号的抗干扰能力。
d. 芯片集成:将以上设计集成在一个芯片中,以便提高整体性能和可靠性。
二、实现方法1. 研究北斗导航系统的技术特点和信号规范,了解其信号的组成和传输方式。
2. 设计射频前端电路,包括低噪声放大器、频率合成器等,以实现对北斗导航信号的接收和解调。
3. 开发高性能的数字信号处理算法,用于解码和定位北斗导航信号。
4. 进行芯片级故障分析和抗干扰设计,提高芯片的稳定性和可靠性。
5. 制造和测试样品芯片,评估性能指标,并进行必要的调试和优化。
6. 进行大规模生产,并进行必要的质量控制和测试,确保芯片的稳定性和一致性。
7. 提供兼容性测试和集成测试,确保芯片与其他导航系统的兼容性和互操作性。
三、设计与实现的挑战1. 多模兼容性:设计一个芯片可以同时兼容北斗、GPS等多个导航系统,要求对不同系统的信号进行接收和解码。
2. 高精度定位:要求芯片具备高精度的定位功能,能够在各种环境下实现精确的导航和定位。
基于Cortex-M3的北斗二代基带芯片设计
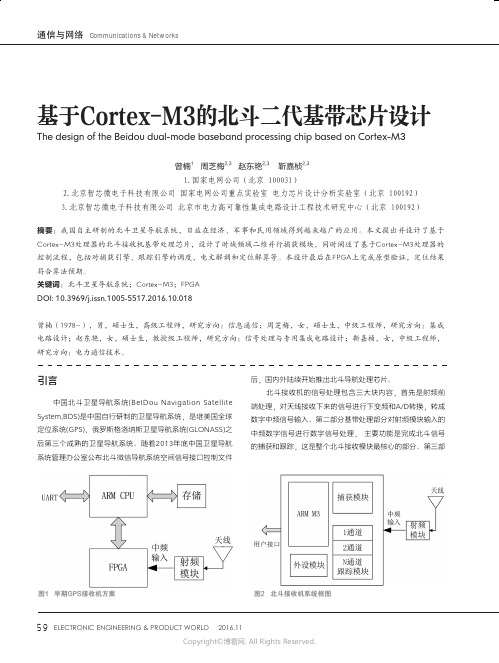
图1 早期GPS接收机方案图2 北斗接收机系统框图5970ELECTRONIC ENGINEERING & PRODUCT WORLD2016.11分是导航定位的解算部分和人机接口,为了提高灵活性,这部分一般由CPU执行软件程序来处理。
早期导航系统GPS接收机方案多为独立射频模块连接天线接收GPS信号后,射频输出的中频信号输入FPGA实现的捕获跟踪协处理器,捕获跟踪后的数据再输出给一颗外接专用的ARM处理器,完成第三部分的报文接收和定位解算,系统结构如图1所示[1-2]。
1 北斗接收机系统随着嵌入式CPU的蓬勃发展,导航定位芯片的SoC设计越来越成为可能,集成了嵌入式CPU内核的接收机芯片,完成信号的捕获跟踪后,导航报文直接由片内CPU解析并处理,完成定位解算,运算的结果数据按照NME0183格式从串口输出,同时送出1PPS秒标信号。
本设计的北斗接收机系统框图如图2所示,射频模块将北斗信号接收下来后,经过去载波处理和AD采样,转换为中频数字信号,输入到本设计的基带处理芯片。
基带处理模块主要元;还有基带芯片最核心的北斗基带处理部分,实现北斗信号的捕获和跟踪处理。
2.1 基带芯片系统架构基于M3的北斗二代基带处理芯片系统架构如图3所示,采用ARM Cortex-M3嵌入式CPU,二级AMBA总线架构;AHB总线的主设备包括CPU和DMA,从设备包括基带处理模块、SRAM控制器、SPI FLASH控制器和APB 桥。
APB总线上挂的主要是低速外设,包括SPI、串口通信模块、看门狗、TIMER、RTC和GPIO。
Cortex-M3是基于ARMv7-M架构的ARM处理器[6-7],采用哈弗架构,3级流水线设计,能用分支预测,有单周期乘法和硬件触发功能。
Thumb2指令集结合非对齐数据存储和原子位处理等特性,能以8位、16位器件所需的存储空间实现32位性能。
内置的嵌套向量中断控制器实现低延迟的中断处理,Cortex-M3处理器是追求低成本、低功耗和高能效的应用场景图3 基于Cortex-M3的北斗基带芯片架构图4 北斗捕获模块功能框图72ELECTRONIC ENGINEERING & PRODUCT WORLD 2016.11乘,得到基带信号。
北斗芯片产业分析
北斗芯片产业分析摘要:北斗芯片通常指可以接收由北斗卫星发射的信号,从而完成定位导航功能的芯片组,包含射频芯片、基带芯片以及微处理器。
基带芯片是导航接收机的核心器件,其功能和性能通常决定了整机的性能指标,其主要功能是完成对指定卫星信号的捕获、跟踪、数据解调,并给出卫星信号的伪距、载波相位等测量信息。
北斗芯片直接决定了导航产品的性能优劣,未来将朝着单芯片集成化、高精度、高动态等方向发展。
导航芯片的优劣很大程度上决定了卫星导航产品的性能,芯片技术更直接关系终端体积、重量、成本和性能,也直接影响北斗下游产业发展,将朝着集成化、低功耗、高精度、高动态等方向发展。
单芯片集成化是将射频芯片、基带芯片和微处理器合而为一的单芯片可以提高产品的性能和可靠性、降低体积、功耗和成本;高精度、高动态则将解决制约北斗卫星导航系统军民大规模应用的重大瓶颈。
从‚有机无芯‛到逐步突破,我国北斗芯片已成功迈入28nm 时代。
直到2008 年2 月,我国第一颗自主开发的完全国产化的北斗卫星导航基带处理芯片‚领航一号‛才在上海宣布研发成功,在此之前北斗接收终端机的芯片都为美国企业提供;2012 年北斗二号完成亚太覆盖的时候,北斗的应用在很大程度上被芯片所限制,‚有机无芯‛一度成为北斗产业的发展瓶颈。
经过5 年的发展,目前芯片工艺已由0.35 微米提升到28 纳米,总体性能达到甚至优于国际同类产品。
芯片为基,将撬动中下游千亿广阔市场。
随着北斗芯片技术的逐步成熟和全球组网加速,北斗产业链将逐步成熟,上中下游将呈现1:4:5 的较为稳定的产业链产值分布结构。
预计到2020 年,上游的数据、芯片、模块类产值在整个产业链的占比稳定在10%左右,产值约400 亿元;中游的系统集成及终端集成产值在整个产业链的占比约为40%,终端产品质量和用户量将有巨大飞跃,产业国际竞争力将大幅增强;下游的运营服务产值贡献预计达到总产值的50%,应用服务水平也将大幅度提高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北斗卫星| 国产化北斗专用芯片样机的设计与实现
为提高北斗导航定位设备的独立自主性能和通用性能,开展基于国产化北斗专用芯片的应用研究和整机方案的设计与研制,通过国产化北斗专用芯片遴选、核心功能组件设计、整机匹配设计以及接口协议的统一,研制了基于国产化北斗专用芯片的样机。
经与定型设备对比,应用国产化北斗专用芯片的样机在全部满足功能性能要求的基础上,军码水平定位精度最大提升87.5%,高程定位精度提升74.1%,1 PPS 精度提升28.3%,抗干扰能力最大提升6 dB,作战应用关键指标提升明显; 设备安全性、自主性等大幅提升,提高了战场生存能力; 核心功能组件可广泛应用于当前北斗二号设备,通用性能提升明显。
引言北斗导航定位设备目前已广泛应用于陆军武器平台,为指挥员及时调整兵力部署、实施精确指挥奠定了基础。
但目前北斗导航定位设备部分部件采用国外进口模块或电路,自主性和安全性得不到有效保障; 设备由多部门开发研制,内部结构复杂多样,通用性距离使用要求还存在一定差距。
因此开展北斗导航定位设备的国产化设计,提高安全自主能力和通用能力,已变得迫在眉睫。
随着北斗二号卫星导航系统的不断升级和能力的不断增强,国内相关部门组织招标研制了系列化国产芯片和模块,且经比测性能稳定,成熟度高,具备了推广应用的基础。
前期相关部门组织开发了基于国产化北斗专用芯片的OEM 板,将北斗接收机的主要部件做成大规模集成电路,集成在一块电路板上,具有北斗信号接收、信号处理、信号输出号和定位等功能。
文献[1-8]对OEM板进行了分析,具备性能稳定、轻巧灵便等优点,可利用其输出的位置、时间等数据信息与计算机、通信等技术相结合,提升导航定位设备的自主能力,但OEM 板目前仅限于特定设备和一定范围内应用,尚未得到大规模推广,且北斗设备的通用性能并未得到有效提升。
本文通过开展基于国产化北斗专用芯片的应用研究以及核心功能组件开发,设计链路匹配与接口标准,提升北斗设备的安全性和自主性,有效减少北斗设备类型,提高其通用性能;。