典型环节传递函数及伯德
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode 图的绘制根据Bode 图确定最小相位系统的传递函数 重点:开环Bode 图的绘制、根据Bode 图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK 的值,并明确积分环节的个数ν 3)通过(1,20lgK )绘制斜率为-20vdB/dec 低频段 4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义: 递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
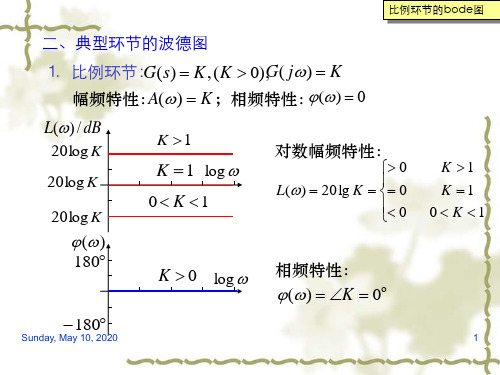
2 典型环节的伯德图绘制曲线在MA TLAB 中实现,利用下述的程序段:num=[b2 b1 b0]; den=[1 a2 a1 a0]; H=tf(num,den); bode(H) margin(H) hold on2.1 比例环节传递函数:()G s K = 频率特性:()G j K ω=对数幅频特性:()20lg L j K ω= 对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den); bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK 分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
K>1时,20lgK>0dB ;K<1时,20lgK<0dB 。
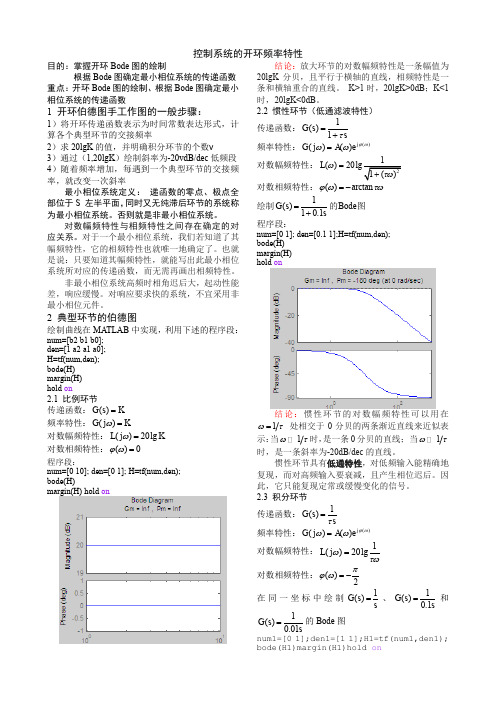
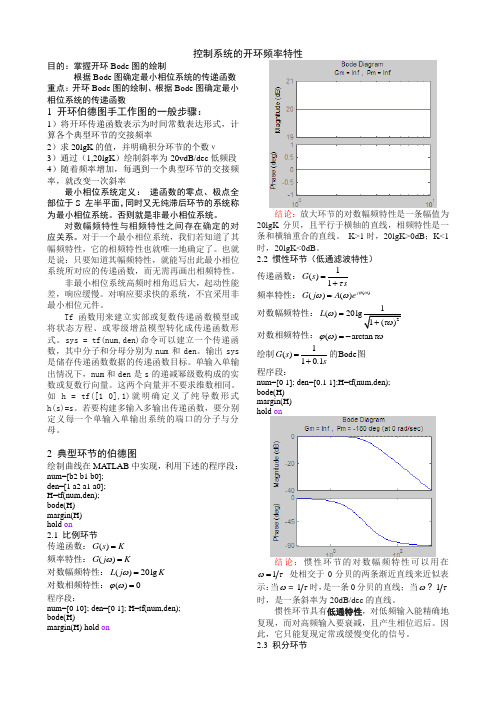
2.2 惯性环节(低通滤波特性)传递函数:1()1G s sτ=+频率特性:()()()j G j A e ϕωωω=对数幅频特性:21()20lg 1()L ωτω=+对数相频特性:()arctan ϕωτω=-绘制1()10.1G s s=+的Bode 图程序段:num=[0 1]; den=[0.1 1];H=tf(num,den); bode(H) margin(H) holdon结论:惯性环节的对数幅频特性可以用在1ωτ= 处相交于0分贝的两条渐近直线来近似表示:当1ωτ时,是一条0分贝的直线; 当1ωτ时,是一条斜率为-20dB/dec 的直线。
考研复习题典型环节伯德图

其幅频特性是:
对数幅频特性为:
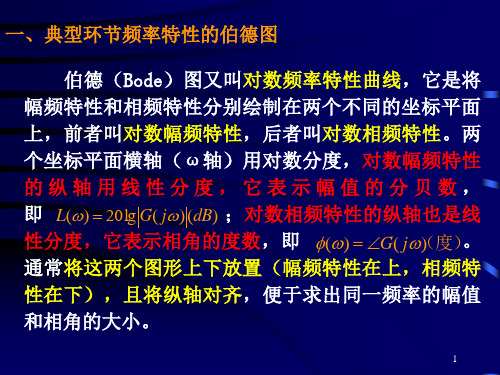
放大环节的对数幅频特性如图5-11所示,它是一条与角 频率ω无关且平行于横轴的直线,其纵坐标为20lgK。 当有n个放大环节串联时,即:
(5-62)
幅值的总分贝数为:
(5-63)
放大环节的相频特性是:
(5-64)
如图5-11所示,它是一条与角频率ω无 关且与ω轴重合的直线。
由图5-19可看出,振荡 环节的对数幅频特性在 转折频率 附近产生 谐振峰值,这是该环节 固有振荡性能在频率特 性上的反映。前面已经 分析过,谐振频率ωr 和谐振峰Mr分别为:
振荡环节对数幅频率特性图
其中 称为振荡环节的无阻尼(ξ=0)自 然振荡频率,它也是渐近线的转折频率。由式(581)可知,当阻尼比ξ愈小谐振频率ωr愈接近无阻 尼自然振荡频率ωn,当ξ=0时,ωr=ωn
当有n个积分环节串联时,即: 其对数幅频特性为: 相频特性是一条与ω无关, 值为-n×900 且与ω轴平行 的直线。两个积分环节串联 的Bode图如图5-13所示。
是一条斜率为-n×20dB/dec, 且在ω=1(弧度/秒)处过零 分贝线(ω轴)的直线。
图5-13 两个积分环节串联的Bode图
三惯性环节 惯性环节的频率特性是: 其对数幅频特性是: 用两条直线近似描述惯性环节的对数幅频特性, 即在 的低频段时, ,与零分贝线重合; 在 的高频段时 是一条斜率为 -20(dB/dec.)的直线。 两条直线在 处相交, 称为转折频率,由这两 条直线构成的折线称为对数幅频特性的渐近线。如图514所示。
二积分环节
积分环节的频率特性是: 其幅频特性为: 对数幅频特性是:
设
,则有: (5-68)
可见,其对数幅频特性是一条 在ω=1(弧度/秒)处穿过零分贝 线(ω轴),且以每增加十倍频率 降低20分贝的速度(-20dB/dec) 变化的直线。 积分环节的相频特性是:
绘制伯德图
幅频和相频特性为:
A( ) (1 T 2 2 )2 (2 T )2, ( ) tg 1
1 T 1 ,o ,称为转折频率或交换频率。 T
Monday, March 09, 2015
可以用这两段渐近线近似的表示惯性环节的对数幅频特性。
3
惯性环节的Bode图
10 渐近线 0 -10 -20 0° -45° -90° 1 20T
20dB / Dec
图中,红、绿线分别是低频、高频渐近线,蓝线是实际曲线。
T
( )
2.0
-63.4
3.0
-71.5
4.0
-76
5.0
-78.7
7.0
-81.9
10
-84.3
20
-87.1
50
-88.9
100
-89.4
1 1 当 0时, (0) 0;当 时, ( ) ;当 时, () 。 T T 4 2 由图不难看出相频特性曲线在半对数坐标系中对于(0, -45°) 点是斜对称的,这是对数相频特性的一个特点。
当时间常数T 变化时,对数幅频特性和对数相频特性的形状 都不变,仅仅是根据转折频率1/T 的大小整条曲线向左或向 右平移即可。而当增益改变时,相频特性不变,幅频特性上 下平移。
Monday, March 09, 2015 6
振荡环节的频率特性
K Kn 2 ⒋ 振荡环节的频率特性: G( s) 2 2 T s 2Ts 1 s 2 n s n 2
0 L( ) 20 lg K 0 0
K 1 K 1 0 K 1
( )
180
K 0
log
考研复习题典型环节伯德图
相频特性是:
二阶微分环节与振荡节 的Bode图关于ω轴对称 ,如图5-21。渐近线的 转折频率为,相角变化 范围是00至+1800。 二阶微分环节的Bode图
七不稳定环节
不稳定环节的频率特性是:
其对数幅频特性和相频特性分别为:
不稳定惯性环节的Bode图
二积分环节
积分环节的频率特性是: 其幅频特性为: 对数幅频特性是:
设
,则有: (5-68)
可见,其对数幅频特性是一条 在ω=1(弧度/秒)处穿过零分贝 线(ω轴),且以每增加十倍频率 降低20分贝的速度(-20dB/dec) 变化的直线。 积分环节的相频特性是:
(5-69)
是一条与ω无关,值为-900 且平行于ω轴的直线。积分环 节的对数幅频特性和相频特性 如图5-12所示。
振荡环节的相频特性是:
除上面三种特殊情况外,振荡环节相频特性还是 阻尼比ξ的函数,随阻尼比ξ变化,相频特性在转折 频率 附近的变化速率也发生变化,阻尼比ξ越小, 变化速率越大,反之愈小。但这种变化不影响整个相 频特性的大致形状。不同阻尼比ξ的相频特性如图520 所示。
振荡环节对数相频特性图
六二阶微分环节
一放大环节(比例环节)
放大环节的频率特性为:
其幅频特性是:
对数幅频特性为:
放大环节的对数幅频特性如图5-11所示,它是一条与角 频率ω无关且平行于横轴的直线,其纵坐标为20lgK。 当有n个放大环节串联时,即:
(5-62)
幅值的总分贝数为:
(5-63)
放大环节的相频特性是:
(5-64)
如图5-11所示,它是一条与角频率ω无 关且与ω轴重合的直线。
如何绘制伯德图
。
6
设 ' 10 ,则有
20 lg 20 lg 10 20 20 lg
'
(5-68)
dB L( )
可见,其对数幅频特性是一条在 ω =1(弧度/秒)处穿过零分贝线 ( ω 轴),且以每增加十倍频降 低 20 分贝的速度( -20dB/dec ) 变化的直线。 积分环节的相频特性是
对数幅频特性为
20 lg G( j ) 20 lg K
(5-61)
当K>1时,20lgK>0,位于横轴上方;
当K=1时,20lgK=0,与横轴重合;
当K<1时,20lgK<0,位于横轴下方。
4
放大环节的对数幅频特性如图5-11所示,它是一条与角频 率ω 无关且平行于横轴的直线,其纵坐 标为20lgK。
0
100
1000
(5-63)
180
0
放大环节的相频特性是
G( j ) 0
0
图5-11 放大环节的Bode图
(5-64) 如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G ( j ) 1 j j 1
1
e
j 90
2 2 2
(5-85)
相频特性是
G ( j ) arctg 2 1
2 2
dB
40
(5-86)20
0
1 1 10
0
精确特性
40dB / dec
二阶微分环节与振荡节的Bode
1
图关于ω 轴对称,如图5-21 。
孙炳达版 《自动控制原理》第5章 控制系统的频率特性分析法-3
比例环节可以完全、真实地复现任何频率的输入 信号,幅值上有放大或衰减作用;υ (ω)=0º ,表示输 出与输入同相位,既不超前也不滞后。
5.3 典型环节的频率特性
二、积分环节 1.代数表达式 传递函数
G (s) 1 s 1
频率特性 相频特性
幅频特性
A( )
1 1 1 j 90 G( j ) j e j () 90
对数频率特性曲线是一条斜线, 斜率为-20dB/dec, 称为高频渐 近线,与低频渐近线的交点为ωn=1/T,ωn称为交接频率或转 折频率,是绘制惯性环节的对数频率特性时的一个重要参数。
5.3 典型环节的频率特性
3.伯德图 对数幅频图
L( ) 20lg A( ) 20lg 1 1 2T 2 20lg 1 2T 2
G ( j ) 1 j 2 2 2 (1 2 2 ) j 2 (1 2 2 ) 2 (2 ) 2 e
2 T j arctan 1 2 2
5.3 典型环节的频率特性
2.极坐标图 理想微分环节的极坐标图在0 <<的范围内,与正虚轴重合。 可见,理想微分环节是高通滤 波器,输入频率越高,对信号的 放大作用越强;并且有相位超前 作用,输出超前输入的相位恒为 90º ,说明输出对输入有提前性、 预见性作用。 (纯微分)
在控制工程中,采用分段直线表示对数幅频特征 曲线,作法为: a.当Tω<<1(ω<<1/T)时,系统处于低频段 L( ) 20lg1 0 b.当Tω>>1(ω>>1/T)时,系统处于高频段
L( ) 20lg T
此直线方程过(1/T,0)点, 且斜率为-20dB/dec。
《自控原理》典型环节的传递函数
1 T2S2+2ξTS +1
C(S)
七、二阶微分环节
d2r(t) dr(t) 2 + r(t) =c(t) 1.微分方程: 微分方程: 微分方程 τ + 2ξτ 2 dt dt
τ:环节的时间常数;ξ:阻尼比。
2.传递函数: 传递函数: 传递函数
G ( s ) = τ S + 2ξτS + 1
G(S)=K
R(S)
K
C(S)
二、积分环节
1.微分方程: c(t)=∫r(t)d(t) 微分方程: 微分方程 ∫ 2.特点: 特点: 特点 输出对输入信号上在时间上的积分。 输出对输入信号上在时间上的积分。 1
3.传递函数: 传递函数: 传递函数
G(S)=
R(S)
S
4.结构图: 结构图: 结构图
1 S
种简单的形式组成,这些典 型的单元,称作典型的环节。
1、比例环节: 、比例环节: 2、积分环节: 、积分环节: 3、纯微分环节: 、纯微分环节:
G(S)=K 1 G(S)= S G(S)=S
1 G(S)= 4、惯性环节: 、惯性环节: TS+1 5、一阶微分环节: G(S)= τS+1 、一阶微分环节: ω2n 6、二阶振荡环节: G(S)= 2 、二阶振荡环节: S +2 ξωnS+ω2n ω 7、二阶微分环节: G ( s ) = τ 2 S 2 + 2ξτS + 1 、二阶微分环节: τ G(S)=e-τs 8、延迟环节: 、延迟环节:
4.结构图: 结构图: 结构图
S
四、惯性环节(一阶环节) 惯性环节(一阶环节)
模拟电子课程波特图

w
(5)一阶微分环节
G 一阶微分环节的传递函数为: ( s) s 1
其频率特性表达式为:
G( jw) jw 1
幅频特性:
A( w) G( jw) 1 2 w2 20lg A( w) 20lg 1 2 w2
1、在低频段 w很小,即w 0
20lg A(w) 20lg 1 0(dB)
幅频特性:
A( w) G ( jw) w 20 lg A( w) 20 lg w
20lg A(w) 20lg w
w每增大 倍,放大倍数就上升 dB 10 20 而且,当w 1时, lg A( w) 0dB 20
20 lg A( w)
20
10
0
10
20
0.1 1 10 100
对数相频特性是 (w)和频率w的关系曲线
(w)
1
2
4
10
20
40
100
w
下面我们只研究对数幅频特性
四、典型环节的对数幅频特性 (1)比例环节
比例环节的传递函数为: G(s) K 常数
其频率特性表达式为: G( jw) K 常数
幅频特性:
A( w) G ( jw) K 20 lg A( w) 20 lg K
w每增大 10倍,放大倍数就下降 dB 20
20 lg A( w)
20
10
当w 1 / T时, lg A( w) 0dB, 20 和低频渐近线相交
0
10
20 0.1/ T
1/ T
10/T
w
3、误差 实际曲线和渐近线有误差,但不大。
当w 1 / T时,误差最大。 1 20 lg A(1 / T ) 20 lg 1 T 2 20 lg 2 3.01dB T 20 lg A( w)
典型环节的频率特性8滞后延迟
一、频率特性的概念
线性定常系统(包括开环系统与闭环系统)在正弦信号作用下
的稳态输出。 R(s)
C(s)
G(s)
输入信号为: r(t) Asin t
R(s) A
A
s2 2 (s j)(s j)
系统的传递函数通常写为
G(s) M (s)
M (s)
N (s) (s s1)(s s2 )...(s sn )
() G( j) arctan[ ImG( j)] Re G( j)
一、频率特性的概念
则 c()公式如下:c() | G( j) | Asin( t )
| G( j) | c()
其中
A 为系统的幅频特性,它反映系
统在不同频率正弦信号作用下,输出稳态幅值与输入信号
一、频率特性的概念
由此得系统输出的拉氏变换为
C(s) R(s)G(s)
M (s)
A
(s s1)(s s2 )...(s sn ) (s j)(s j)
b b a1 a2 ... an
s j s j s s1 s s2 s sn
0
积分环节相频特性与输入频率无关但对正弦输入信号有90°的滞后作
用;幅频特性是角频率的函数,当 从0变化到无穷大时,输出幅值
则由无穷大衰减至零。
2、积分环节 G()
1
1
j
e2
j
G( j) 90o
L() 20 lg( 1 ) 20lg
在对数分度的频率轴上,频率比相等的两点间水平距离相等。
频域分析法
频率特性法
频率特性法介绍
典型环节频率特性
2
2
2
2
1 1 是一个标准圆方程,其圆心坐标是 。且 ,0 ,半径为 2
,说明惯性环节的频率特
2
Im
G
0
0.5
0
450
Re
1 2 2 0 r G( j r ) arctg 90 arcsin 1 2
振荡环节的幅值特性曲线如图所示。在 0 r 的范围内,随着ω 的增加, M ( ) 缓慢增大;当 r 时, M ( ) 达到最大值 M r ;当
5-2 典型环节频率特性的绘制
自动控制系统通常由若干环节构成,根据它们的基本特性,可划分
成几种典型环节。本节介绍典型环节频率特性的绘制方法(极坐标图和
伯德图)。
一、典型环节的幅相特性曲线(极坐标图)
以角频率ω 为参变量,根据系统的幅频特性 G( j ) 和相频特性
G( j ) 在复平面 G( j )上绘制出的频率特性叫做幅相特性曲线或频率
特性的极坐标图。它是当角频率ω 从0到无穷变化时,矢量 G( j ) e j 的矢 端在 G( j ) 平面上描绘出的曲线。
(一) 放大环节(比例环节)
放大环节的传递函数为
G( s) K
其对应的频率特性是
其幅频特性和相频特性分别为
G( j ) K
G( j ) K
Im
G( j ) 0
2
4 2T 2 2 0
r
1 1 1 2 2 n 1 2 2 (0 ) T 2
典型环节的Bode图

典型环节的B o d e图-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
2 典型环节的伯德图绘制曲线在MATLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) hold on结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
K>1时,20lgK>0dB;K<1时,20lgK<0dB。
典型环节
[G ( jω )]
1
ω →∞
0
G ( jω ) =
(1 − T ω ) + (2ζTω )
2 2 2
1
2
ωn ωn ωn
1 ω ≤ T
ς↑
ω →0
ς↓
2ζTω − arctan 1 − T 2ω 2 ∠ G ( jω ) = 2ζTω − π − arctan 1 − T 2ω 2
6、勾画出大致曲线。
①
②
当频率ω = 0 时,其开环幅相特性完全由比例环节和积分环 节决定。 节决定。 G 开环传递函数不含积分环节, 开环传递函数不含积分环节,即v = 0 时,( jω ) 曲线从正实 开始; 轴 开始;G ( j0) = K∠0° G 开环传递含有一个积分环节, 开环传递含有一个积分环节,即 v = 1 时, ( jω ) 曲线从负虚 π G 轴方向开始; 轴方向开始; ( j 0 ) = ∞ ∠ − 2 π G 曲线从负实轴方向开始; 当 v = 2 时,曲线从负实轴方向开始; ( j 0 ) = ∞∠ − 2 2 其余依次类推。 其余依次类推。 ,(即 中分母阶次n 当频率 ω = ∞ 时,若 n > m ,(即 G ( s ) 中分母阶次 大 于分子阶次m) 的模值等于0, 于分子阶次 )其 G ( jω ) 的模值等于 ,相为 ( m − n ) π 。 2 即 π G ( j ∞ ) = 0∠ ( m − n ) 2
G ( jω) = G ( jω) e j∠G( jω) = u (ω) + jv (ω)
a) 令∠G ( jω ) = −π 。解出与负实轴交点处对应的频率 ω x 的值。再将 ω x 代入 G ( j ω ) 中,求得与负实轴交 的值。 点的模值。 点的模值。 b) 令 v (ω ) = 0 解出 ω x ,再将 ω x 代入 u (ωx ) 中求得与负 实轴交点的坐标。 实轴交点的坐标。
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
Tf函数用来建立实部或复数传递函数模型或将状态方程、或零级增益模型转化成传递函数形式。
sys = tf(num,den)命令可以建立一个传递函数,其中分子和分母分别为num和den。
输出sys 是储存传递函数数据的传递函数目标。
单输入单输出情况下,num和den是s的递减幂级数构成的实数或复数行向量。
这两个向量并不要求维数相同。
如h = tf([1 0],1)就明确定义了纯导数形式h(s)=s。
若要构建多输入多输出传递函数,要分别定义每一个单输入单输出系统的端口的分子与分母。
2 典型环节的伯德图绘制曲线在MA TLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on2.1 比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
典型环节的传递函数

典型环节的传递函数
传递函数是一种表示线性时不变系统的方法,它可以表示为输入和输出之间的关系。
典型环节的传递函数是指在不同应用场景下,系统的输入和输出之间具有特定的数学关系。
下面列举一些常见的典型环节的传递函数:1、比例环节:
传递函数:G(s) = K
特性方程:y = Kx
2、一阶滞后环节:
传递函数:G(s) = K/(Ts+1)
特性方程:y(t) = Kx(t-t0)
3、积分环节:
传递函数:G(s) = Ks/(Ts+1)
特性方程:y(t) = K∫x(t) dt
4、微分环节:
传递函数:G(s) = Ks
特性方程:y(t) = Ky(t) + Kd/dt[y(t)]
5、二阶振荡环节:
传递函数:G(s) = (K/T)(s^2+ω^2)/(s^2+2ζω_n s+ω_n^2)
特性方程:(T/K)(y''(t)+2ζω_n y'(t)+ω_n^2 y(t))=x''(t)+2ζω_n x'(t)+ω_n^2 x(t)
其中,K表示增益,T表示时间常数,s表示复变量,x表示输入,y 表示输出,ω_n表示无阻尼固有频率,ζ表示阻尼比。
典型环节的频率特性

Im
G
Re
900
0
积分环节的频率响应
频率特性如图所示。由图可知,积分环节的相频特性等于 -900 , 与角频率ω 无关,表明积分环节对正弦输入信号有900的滞后作用;其幅 频特性等于 1 ,是ω 的函数, 当ω 由零变到无穷大时,输出幅值则由 无穷大衰减至零。
(3) 用渐近线表示幅频特性,使作图简单方便;
(4) 横轴(ω 轴)用对数分度,扩展了低频段,同时兼顾 了中、高频段,有利于系统的分析与综合。
(一)放大环节(比例环节) 放大环节的频率特性为 G ( j ) K ( K 0)
其幅频特性是
G( j ) K
对数幅频特性为
20 lg G( j ) 20 lg K
-20
-40
( )
两个图形上下放置(幅
频特性在上,相频特性
在下),且将纵轴对齐, 便于求出同一频率的幅
90o
值和相角的大小,同时
为求取系统相角裕度带
45o
0 -45o -90o 0.01 0.1 1 10 100
来方便。
用伯德图分析系统有如下优点: (1) 将幅频特性和相频特性分别作图,使系统(或环节)
2 2 2
2
1 是一个标准圆方程,其圆心坐标是 ,0 ,半径为 1 。且
当ω 由 0 时, G ( j ) 由 0 90 ,说明惯性环节的频率特 性在G( j ) 平面上是实轴下方半个圆周,如图所示。
2
2
Im
G
0
0.5
0
450
幅频特性和相频特性分别为
典型环节
1
∠G ( jω ) = −90
ω
= −20 lg ω
o
L(ω )
20 0 0.1 -20 1
( jω )2
1
1
ω 10 − 20 dB dec
ϕ (ω )
− 40 dB dec
ω
L(ω ) = 20 lg
∠G ( jω ) = −180o
ω
2
= −40 lg ω
0 -90 -180
3、微分环节
∠G ( jω ) = 90
(1 − T ω ) + (2ζTω )
2 2 2
2
2ζTω −1 − tan 1 − T 2ω 2 ∠ G ( jω ) = 2ζTω − π − tan −1 1 − T 2ω 2
ω
ϕ (ω )
− 40dB dec
ω →0
ω →∞
ϕ (ω ) ≈ 0 o 2 L(ω ) ≈ −20 lg (Tω ) = −40 lg (Tω ) ϕ (ω ) ≈ −180 o
(二)斜坡信号 斜坡信号的表达式为:
At r (t ) = 0
t >0 t ≤0
L[t × A(t )] =
A
如图3.2所示。其拉氏变换式为:
s
2
当A=1时则称为单位斜坡信号,常用t×1(t)表示, (三)脉冲信号
∞, 单位脉冲信号的表达式为:δ (t ) = 0 , t =0 t≠0
∫
∞
−∞
δ (t )dt = 1
拉氏变换式:
L δ ( t ) = 1
(四)正弦信号 正弦信号的表达式为 :
A sin ω t r (t ) = 0 t >0 t ≤0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G(s) =
= τ 2s 2 + 2 ζτs + 1
R(s)
29
7. 二阶微分环节
Gjω 1 2ζ Tjω T 2 jω2
L ω 20lg 1 T2ω 2 2 2ζ Tω 2
ω tg1 2ζ Tω
1 T 2ω 2
二阶微分 环节的幅 频和相频 特性分别 与振荡环 节的相应 特性是关 于横轴对 称。
2
4
6 8 10
7. 二阶微分环节
28
二阶微分环节的传递函数是振荡环节的倒数。
特点:输出与输入及输入一阶、二阶导数都有关。
方块图为:
R (s)
τ 2s 2 + 2 ζτs + 1
C (s)
运动方程: 传递函数:
d 2r(t)
dr(t)
c(t) = τ 2
+ 2 τζ
+ r(t)
dt 2
dt
C(s)
L( ) dB
40
0.7
20
0.3 0.2
0
( )
180 90
0.7
0.3 0.2
40
0
1
1
10T
T
10
T
1 T
( ) 90
0.1 0.2 0.3
0.7 1
0.1 0.2 0.3 0.7 1
L() 40 lgT 40 lg1 0(dB)
180 0.1
0.2
0.4 0.6 0.8 1
说明 ω ω为n 二T阶1 系统(振荡环节)的转折频率。
/n
产生谐振峰值,阻尼比的大小决定了谐振峰值的幅值。
Y (s) E(s) G1(s)G2 (s) G(s)
B(s) H (s) Y (s)
B(s) E(s)
G1(s)G2 (s)H
(s)
G(s)H (s)
T (s)
Y (s) R(s)
1
G(s) G(s)H
= 前向传函 (s) 1+开环传函
E(s) R(s)
1
1 G(s)H (s)
1 1+开环传函
(1)电阻、电容电路
如图所示。由基尔霍夫定律有
将电容的电流 代入上式得
对上式进行拉氏变换,并整理得
18
4.惯性环节 (是一个相位滞后环节)
(2)弹簧-阻尼系统
弹簧力与弹簧的形变成正比,即弹簧力 ,K 为弹簧的弹性系数。
阻尼器的阻力与相对速度成正比,即阻尼力 ,B为粘性阻尼系数。
由于两力相等,有
L( )(dB)
20lgK
j
K 0
0
0.1
1
10
( )(度)
0
0.1
1
10
7
2.积分环节
积分环节的特点:输出量与输入量的积分成正比例,即输出量取 决于输入量对时间的积累过程。
积分环节的微分方程:
积分环节的传递函数:
积分环节的单位阶跃响应:
8
2.积分环节
积分环节也是自动控制系统中最常见的环节之一,凡是输出量对输入量具有 贮存和积累特点的元件一般都含有积分环节,例如机械运动中位移与转速、 转速与转矩、速度与加速度、电容的电压与电流、水箱的水位与水流量等。 下面介绍几个常见的积分环节。 (1)电动机
L( )(dB) 20
j
0 0.1
1
10
1 0
( )()
0.1
1
0
-90
10
-180
25
6.振荡环节 二阶输出的微分方程描述的系统,包含两个独立的储能元件。
振荡环节的微分方程
振荡环节的传递函数
振荡环节的单位阶跃响应:
26
6.振荡环节
在自动控制系统中,若系统中具有两个不同形式的储能 元件,而两种元件中的能量又能相互交换,就可能在交 换和储存过程中出现振荡,形成振荡环节。
0.707
1
T
( )()
0.1 1 T
1
10 1
T
T
0
-45
20
5 一阶微分环节
特点:此环节的输出量不仅与输入量本身有关,而且与输 入量的变化率有关。
R(s)
C(s)
方块图为:
τs + 1
运动方程: 传递函数:
c(t) τ
dr(t) dt
r(t)
G( s ) =τs + 1
5 一阶微分环节
21
6.振荡环节:G(s)
s2
1 2 n s
n2
,特点:环节中有两个储能环节,其输出出现振荡。
4
1.比例环节(放大环节)
比例环节的特点:输出量与输入量之间的关系是一种固定 的比例关系,也就是输出量能无失真、无滞后地按一定比 例复现输入量。
比例环节的微分方程:
比例环节的传递函数:
比例环节的单位阶跃响应:
电动机转速和转矩、角位移和转速都是积分关系。 当不考虑负载转矩时,电动机的转矩与转速的关系如下
对上式进行拉氏变换得
而电动机的角位移与转速关系如下
对上式进行拉氏变换可得
9
2.积分环节
(2)电容电路 电容两端的电压和电流是积分关系。 电容的电量
对上式进行拉氏变换可得
(3)积分电路 • 输出电压和输入电压是积分关系。 • 由电子学知识可知
1、早期皮肌炎患者,还往往伴 有全身不适症状,如-全身肌肉酸 痛,软弱无力,上楼梯时感觉两 腿费力;举手梳理头发时,举高 手臂很吃力;抬头转头缓慢而费 力。
16
4.惯性环节 (一阶积分环节,是一个相位滞后环节)
惯性环节的特点:当输入量突变时,输出量不会突变,只能按指数 规律逐渐变化,即具有惯性。
3.微分环节
理想微分环节:G(s) Ks
...一阶微分环节:G(s) s 1
,特点:输出能够预示输入信号的变化趋势。
二阶微分环节:G(s) 2s2 2s 1
4.惯性环节G(s) 1 ,含储能环节,对突变输入不能立即复现,输出无振荡。 Ts 1
5.纯延迟环节:c(t) r(t ),G(s) es ,式中为延迟时间。
齿轮的角速度与齿条的位移是微分关系。以齿条的直线位移为输
入,齿轮的角速度为输出时有
对上式进行拉氏变换可得
13
3. 理想微分环节
(2)测速发电机 • 输出电压与转轴转角是微分关系。测速发电机的输出电压为 ,
转轴角速度为 ,
• 对上式进行拉氏变换可得
3. 理想微分环节
G(s) s
14
G( j) j
• 对上式进行拉氏变换得
• 式中,T 为积分时间常数,T=RC。
2.积分环节
j 0
10
G( j) 1 , L() 20lg G( j) 20lg 1 20lg
G( j) 1 90 () G( j) 90 j
L( )(dB)
40
20
20dB / dec
0 0.01 0.1
1
10
( )()
对上式进行拉氏变换,并整理得
弹簧-阻尼系统
19
4.惯性环节 (是相位滞后环节)
G(s) 1 Ts 1
G( j) 1 jT 1
j
G( j) 1 T 22 1
G( j) 1 arctanT
jT
L( )(dB)
0.1 1 T
转折频率
1
渐10近1 线
T
T
0
45
0
0
-20
实际幅相曲线
20dB / dec
下图所示为轧钢机厚度检测环节,带钢在A点轧出时,厚度偏差 为 ,这一厚度偏差在到达B点后才为测厚仪检测到。若A点和B 点距离为l,带钢运动速度为v,则延迟时间为
而测厚信号 与厚差信号 之间关系为
24
6. 延迟环节 G(s) es Байду номын сангаас( j) e j
G( j) 1 G( j) (rad ) 57.3 (度) L() 20lg G( j) 0dB () 57.3(度)
惯性环节的微分方程:
式中,T为惯性时间常数。 惯性环节的传递函数:
惯性环节的单位阶跃响应:
17
4.惯性环节 (一阶输出的微分环节,是一个相位滞后环节)
自动控制系统中经常含有这种环节,这种环节含有一个储能元件(如储存磁场能 的电感、储存电场能的电容、储存弹性势能的弹簧和储存动能的机械负载等)和 一个耗能元件(如电阻、阻尼器等)。下面通过两个实例来加以说明。
例如,前面介绍的机械平移系统中含有储存弹性势能的
弹簧和储存动能的机械负载,而这两种能量能相互交换,
所以在
时,就会产生振荡。同样,RLC串联网
络,由于含有储存磁场能的电感和储存电场能的电容,
而这两种能量也能相互换,所以在
时,就会产生振荡。
27
6.振荡环节
Gjω
T2 jω2
1 2ζ
Tjω
1
Lω 20lg
1 T2ω2 2 2ζ Tω 2
ω
tg 1
2ζ Tω 1 T2ω2
低频段,即ωT<<1时
Lω 20lg1=0 dB
高频段,即ωT>>1时
10
L( )
0
dB
L( ) 20 lg( 2T 2 ) 40 lg(T )
10
渐近线:斜率为-40dB/dec的直线。 0
当
ω
ω时n
延迟环节的微分方程: 延迟环节的传递函数: 对于延迟时间很小的延迟环节,常常将它按泰勒 级数展开,并略去高次项,得如下简化的传递函数
上式表明,在延迟时间很小的情况下, 延迟环节可近似为一个小惯性环节。 延迟环节的单位阶跃响应如图所示。