E+L纠偏调试手册
E+L-纠偏调试手册
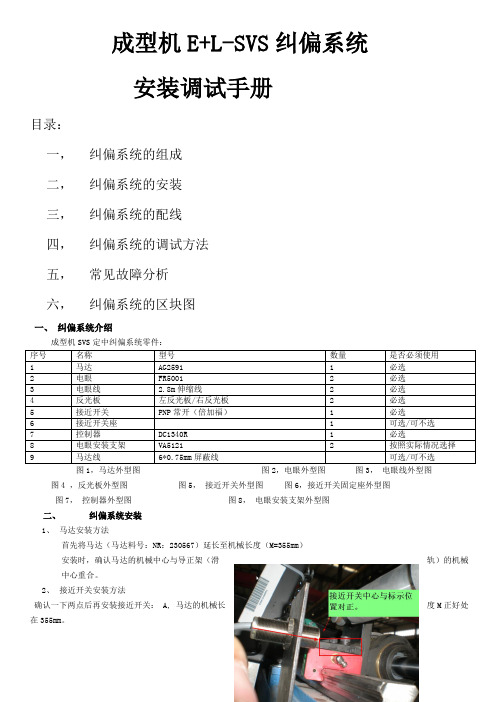
成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A, 马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改) 首先、安装不松手,按一,显下示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至2.9(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22) 97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
纠偏控制E+L

Web guiding systems 材料導正系統
功能區
按鍵指示
協助目錄
警告顯示
輸入按鍵
增加值
減少值 確認
導正系統 功能鍵
導正型式 (選擇感應器(電眼))
電動式感應器(電眼) 位置
搖擺功能
多功能控制 驅動單元模式按鈕
自動模式
中心回歸
手動模式
技術資料 DO 20
控制電壓
電壓值
24 V DC
電壓範圍
在輸出及輸入上有明確的排列單元。 分頁功能 - 訊息 - 輸入控制功能 - 操作模式 - 顯示 有 6 種可選擇語言全文顯示。 人類工學功能設計。
藉由使用便利的全文顯示適用的控制選 單,使各種驅動單元明確及單一的回應, 在第一次的使用中,即可容易的控制並 建立參數,使 CAN 網路結構之事件清楚 的傳達於使用者。
Web guiding systems 材料導正系統
Digital Control System 數位控制系統
Command device DO 20
控制裝置 DO 20
使用者的環境是透過機器介面來達成人 與機器的溝通,我們優先採用此人性化 的操作介面。
控制裝置 DO 20 是依照使用者適用性為 其設計觀念,提供下列優點:
20-30 V DC (incl. ripple)輸入電流ຫໍສະໝຸດ 200 mA環境溫度
10 C to 50 C
儲存溫度
-25 C to 80 C
CAN 電壓
5 V (potential-free)
CAN 傳遞速度
250 kBaud
重量
Approx. 0.5 kg
保護等級
控制裝置電箱
IP 54
E+L-EPC纠偏系统说明书-2013

E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。
E+L EPC纠偏系统说明书

E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。
EL纠偏调试手册

E L纠偏调试手册Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关:A,马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L 电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4,E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至(3)按住不松手,按至16(自动速度),松开,按至20(4) 17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8 (11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至(14)按住不松手,按至51(速度_I),松开,按至(15)56电流4A时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至(17)按住不松手,按至81(马达极限信号),松开,按至2 (18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22) 97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
el纠偏控制器说明书

el纠偏控制器说明书标题:EL纠偏控制器说明书一、引言EL纠偏控制器是一种先进的电子设备,可广泛应用于印刷、纺织、制药等行业中的卷材自动化生产过程中。
本文将全面介绍EL纠偏控制器的原理、功能和使用方法,以帮助用户正确有效地使用该设备。
二、原理及功能1.原理:EL纠偏控制器采用先进的传感技术,能够实时监测卷材的位置偏差,并通过精确的调整控制,使其保持正常的位置。
2.功能:(1)位置检测:EL纠偏控制器能够准确地识别卷材位置的偏差,并以高精度传感器的形式将数据反馈给控制系统。
(2)自动调整:根据位置偏差数据,EL纠偏控制器能够自动调整卷材的运动轨迹,使其恢复正常位置。
(3)速度控制:EL纠偏控制器可根据实际情况灵活调整卷材的运动速度,确保其在高速运行中仍能保持正常位置。
(4)报警功能:EL纠偏控制器配备了智能警报系统,当控制过程中出现异常情况时,能够及时报警,并停止卷材运动,确保生产安全。
三、使用方法1.安装:将EL纠偏控制器正确安装在卷材自动化生产设备中,并确保传感器与卷材的接触良好。
2.参数设置:根据实际生产需要,按照操作手册指导,设置合适的参数,包括位置偏差范围、控制灵敏度等。
3.启动和校准:按照操作手册的说明,正确启动EL纠偏控制器,并进行设备校准,确保其工作准确。
4.监测和调整:在卷材生产过程中,及时监测EL纠偏控制器的工作状态,如发现异常,及时调整参数或联系维修人员进行检修。
5.维护与保养:定期对EL纠偏控制器进行维护保养,保持设备的正常工作状态,防止灰尘、水分等对设备的影响。
四、注意事项1.请勿随意更改参数:不得随意更改EL纠偏控制器的参数,以避免引起不必要的错误。
2.权威人员操作:使用EL纠偏控制器时,请确保由经过培训并具备相关知识的专业人员操作,以确保安全和设备正常运行。
3.防止外力干扰:请注意防止外界因素对EL纠偏控制器的影响,避免撞击、水淋等情况。
4.异常情况报警:若EL纠偏控制器发出报警,请立即停止卷材运动,并进行排查处理。
E+L纠偏器8201调试

线性CCD相机 DO 8201
第二部分 使用说明
Seite
1
14.04.2015
SCH-DO_8201-020-EN-02
1.
概述
2.
说明事项
使用说明
3. 4. 5. 6.
边部配置 宽度测量 保存/备份/恢复备份 诊断
Seite
2
14.04.2015
SCH-DO_8201-020-EN-02
照相机的视野范围可以被划分为几个区域, 被叫做edge search regions.
1. 2.
选择 search region no. (1, 2, …). 配置search region 下拉菜单可以选择, 添加或删除regions
x: End:
Begin:
区域的起始像素
区域的停止像素
白平衡level%以下的区域或白平衡覆盖的区域不包括在
形一起显示
如果某一个镜头的没有开启,那么当前显示波形的界面的状 态是“disabled”
Seite
4
14.04.2015
SCH-DO_8201-020-EN-02
START UP I NSTRUCTION
C . O . L . I N D E TA I L
这个界面是CamX Edge X的界面。可以显示每个相机的两个 下降沿。页面上的信息包括:
Seite
11
14.04.2015
SCH-DO_8201-020-EN-02
START UP I NSTRUCTION
ADDRESS S ETTINGS
每个设备在一个物理网络的IP地址必须是唯一的 连接的设备必须有相同的子网掩码 网关地址是当你想连接到DO通过使用调制解调器,路由 器等时使用。
E+L纠偏调试手册
成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A, 马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至2.9(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22) 97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
E+l纠偏

纠偏群组位置0.5参数说明号码 参数名称 默认值最小值最大值单位 功能说明..2. 复归功能设定 00 0无功能1将系统恢复成客户端设定值2将系统恢复成内部设定值..3. 特殊功能设定00 0无功能1控制器重新激活2储存参数值10马达执行初始化11电眼调整器初始化12依据规格书内此轮初始马达13马达导正标准快照22储存应用参数42开启延伸设定44回存用户设定98清除内存内错误讯息99清除内存内资料..4.软件版本.1.3 中立带 2 ‐2000 2000 mm 导正器比例带 当材料偏移多少时DC马达以最高速运转 若导正过于不精准时减小此值 若导正不稳定时增加此值.1.6 自动速度150 1000 Mm/s自动模式下最大追踪速度.1.7 移动速度 100 1000 Mm/s定位模式下最大移动速度.1.8 手动速度 151 1000 Mm/s手动模式下的移动速度.1.9 侦测速度 11 1000 Mm/s当超出设定门阀时的移动速度.2.4 马达方向00 10时正常1反向.2.5 马达移动总行程 2000 3270 mm 校正时马达总移动范围正负为100时 总移动行程200mm进入群组操作(参数更改完成后,1分钟即自动离开设定系统)操作按钮 显示状态 说明 SETUP+ 或. . 0. 进入系统或 . . 5. 1 2表示EPC电眼3表示LPC 电眼、4 前有‐号表现无装置5表示控制器入RK004. . 5. 进入群组5SETUP+ 或. . 0. 选择想查看的参数位置0.0 显示此参数位置的参数值或耿直参数值中位设定手动状态下 按手动 移动居中(进烘箱和出烘箱料膜料边与导向辊端面距离相同) 按SETUP+ 进入设定系统(显示 或 ) 再SETUP+ 一下 断电 重新上电后查看中位是否准确。
纠偏安装调试说明
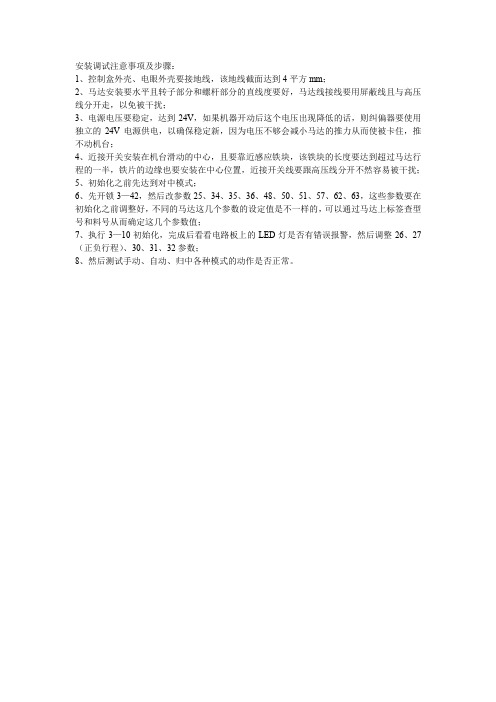
安装调试注意事项及步骤:
1、控制盒外壳、电眼外壳要接地线,该地线截面达到4平方mm;
2、马达安装要水平且转子部分和螺杆部分的直线度要好,马达线接线要用屏蔽线且与高压线分开走,以免被干扰;
3、电源电压要稳定,达到24V,如果机器开动后这个电压出现降低的话,则纠偏器要使用独立的24V电源供电,以确保稳定新,因为电压不够会减小马达的推力从而使被卡住,推不动机台;
4、近接开关安装在机台滑动的中心,且要靠近感应铁块,该铁块的长度要达到超过马达行程的一半,铁片的边缘也要安装在中心位置,近接开关线要跟高压线分开不然容易被干扰;
5、初始化之前先达到对中模式;
6、先开锁3—42,然后改参数25、34、35、36、48、50、51、5
7、62、63,这些参数要在初始化之前调整好,不同的马达这几个参数的设定值是不一样的,可以通过马达上标签查型号和料号从而确定这几个参数值;
7、执行3—10初始化,完成后看看电路板上的LED灯是否有错误报警,然后调整26、27(正负行程)、30、31、32参数;
8、然后测试手动、自动、归中各种模式的动作是否正常。
E+L-纠偏调试手册

成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:序号名称型号数量是否必须使用1 马达AG2591 1 必选2 电眼FR5001 2 必选3 电眼线 2.8m伸缩线 2 必选4 反光板左反光板/右反光板 2 必选5 接近开关PNP常开(倍加福) 1 必选6 接近开关座 1 可选/可不选7 控制器DC1340R 1 必选8 电眼安装支架VA5121 2 按照实际情况选择9 马达线6*0.75mm屏蔽线可选/可不选图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A, 马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至2.9(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22) 97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
印刷E+L纠偏说明书LPC&EPC综合说明书_P1-11_
莱默尔(杭州)机电设备有限公司Erhardt+Leimer (Hangzhou) Co., Ltd.目 录1 功能介绍1.1 LPC 系统 (4)1.2 EPC 系统 (5)2 运用范例2.1 LPC/EPC 系统 (6)2.2 REELING STATION (7)2.3 PIVOTING FRAME (8)3 各系统配套件介绍3.1 LPC 电眼感测装置3.11 探线/边型: F E 5002 电眼(群组位罝0.3)…………………..9 3.2 EPC 电眼感测装置3.21 探边型: F R 5001 电眼(群组位置0.1/0.2)………………..10 3.22 探边型: F X 4030 电眼(群组位置0.1/0.2)………………..10 3.3 控制装置3.31 D C 1340控制器(用于100W 以下M o t o r ),群组位置0.5…...11 3.4 驱动装置3.41 A G 2491驱动器(240N ,25m m /s ,±12/25/50m m ).........................12 3.42 A G 2591驱动器(1000N /2500N ,24/10m m /s ,±25/50/75/100m m )......12 3.43 A G 2691驱动器(3000/5300N ,19/10m m /s ,±50/75/100/175m m )......13 3.44 A G 4081驱动器(250N ,21m m /s ,±6/25/50m m )..........................13 3.45 A G 4591驱动器(1000N ,24m m /s ,±25/50/75/100) (14)3.46 A G 4691驱动器(3000N ,25m m /s ,±25/50/75/100).....................14 3.47 A G 5791驱动器(10000N ,25m m /s ,±50/100/150/200/300m m )........15 3.48 A G 5891驱动器(20000N ,10m m /s ,±50/100/150/200/300m m )........15 3.49 A G 6791驱动器(10000N ,25m m /s ,±50/100/150/200/300m m )........16 3.50 A G 6891驱动器(20000N ,10m m /s ,±100/150/200/300m m )............16 3.5 中心回归装置 (17)以上红色记号处为此份说明书之重点部份以上红色记号处为此份说明书之重点部份4 各系统配套件功能键/指示灯说明4.1感测装置4.11 F E 5002电眼………………………………………………………19 4.12 F R 5001 / F X 4030电眼………………………………………… 20 4.2控制装置5 LPC 系统操作说明................................................... 21 6 EPC 系统操作说明................................................... 28 7 各装置群组位置及参数值运用说明.................... 29 8 各装置参数表 (34)9按装及试车说明 (53)10各装置尺寸图 (58)11 选配系统说明 / 公司信息…………………………………………..684.整套系统均采用数字式控制,因此可与计算机或PLC系统联机,可单点多机控制,亦可单机多点控制。
EL纠偏调试手册

E L纠偏调试手册集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关: A,马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4 , E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100(7)按住不松手,按至26(电机正行程),松开,按至30(8)按住不松手,按至27(电机负行程),松开,按至-30(9)按住不松手,按至34(编码器解析度),松开,按至8(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750(13)按住不松手,按至50(速度_P),松开,按至(14)按住不松手,按至51(速度_I),松开,按至(15)56 电流 4A时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至(17)按住不松手,按至81(马达极限信号),松开,按至2(18)按住不松手,按至83(回中开关信号),松开,按至-3(19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22)97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1(24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
EL纠偏调试手册
成型机E+L-SVS纠偏系统安装调试手册目录:一,纠偏系统的组成二,纠偏系统的安装三,纠偏系统的配线四,纠偏系统的调试方法五,常见故障分析六,纠偏系统的区块图一、纠偏系统介绍成型机SVS定中纠偏系统零件:图1,马达外型图图2,电眼外型图图3,电眼线外型图图4,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图图7,控制器外型图图8,电眼安装支架外型图二、纠偏系统安装1、马达安装方法首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法确认一下两点后再安装接近开关:A,马达的机械长度M正好处在355mm。
B,导正辊处的滑块位于滑轨的中心处。
,安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm即可目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的3、系统配线见附件注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点三,纠偏的调试步骤检查E+L电源线和信号线是否为24VDC,确认没问题后,上电。
1、根据马达对RK4004设定参数(按照以下方法进行检查,若参数不对,则修改)首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数(1)按住不松手,显示。
4,E+L(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至(3)按住不松手,按至16(自动速度),松开,按至20(4)17参数为回中速度(5)按住不松手,按至24(电机方向),松开,按至1(6)按住不松手,按至25(电机总行程),松开,按至100 (7)按住不松手,按至26(电机正行程),松开,按至30 (8)按住不松手,按至27(电机负行程),松开,按至-30 (9)按住不松手,按至34(编码器解析度),松开,按至8 (10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5(12)按住不松手,按至48(最大电机转速),松开,按至2750 (13)按住不松手,按至50(速度_P),松开,按至(14)按住不松手,按至51(速度_I),松开,按至(15)56电流4A时报警Err3)(16)按住不松手,按至57(电机电流),松开,按至(17)按住不松手,按至81(马达极限信号),松开,按至2 (18)按住不松手,按至83(回中开关信号),松开,按至-3 (19)按住不松手,按至84(自动信号),松开,按至14(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)(22) 97#参数0801(23)按住不松手,按至99(选择双电眼工作),松开,按至1 (24)按住不松手,按至3,松开,按至10(给电机做初始化)(25)按住不松手,按此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
E+L EPC纠偏系统说明书 2013

E+L-EPC纠偏系统说明书本说明适用于德国E+L纠偏常规产品目录E+L-EPC纠偏系统说明书 (1)一、E+L-EPC纠偏系统总体说明 (3)二、E+L-EPC纠偏系统所需零件说明 (4)三、E+L-EPC纠偏系统机械安装说明 (5)3.1、控制器的安装 (5)3.2、电眼的安装 (5)3.2.1、通过EPC纠偏应用场合确认电眼安装位置 (5)3.2.2电眼的安装要求 (6)3.3、电机的安装 (6)3.3.1、确定电机型号 (6)3.3.2、确定电机机械中心 (7)3.3.3、调整电机机械中心 (7)3.3.4、安装电机 (7)3.4接近开关的安装 (7)3.4.1、接近开关感应片 (7)3.4.2、接近开关安装位置 (7)四、E+L-EPC纠偏系统配线说明 (10)4.1确认电压 (10)4.2、电机线布线要求 (10)4.3、E+L布线要求 (10)五、E+L-EPC纠偏面板说明 (10)六、E+L-EPC纠偏系统参数设定 (11)6.1、CAN网络群组地址设定 (11)6.1.1、RK4004地址设定 (11)6.1.2、FR5001电眼地址设定 (12)6.2、RK4004参数设定 (13)七、E+L-EPC纠偏系统试车 (15)八、E+L-EPC纠偏系统维护及故障说明 (15)8.1、EPC纠偏系统日常维护 (15)8.2、通过RK4004错误码信息来解决故障 (15)8.3、通过FR5001电眼错误码信息来解决故障 (16)九、附件 (17)附件一、电机尺寸图附件二、电机参数值附件三、EPC标准接线图纸附件四、RK4004控制板参数设定手册一、E+L-EPC纠偏系统总体说明我们将用一个电眼检测材料边缘来纠偏的纠偏系统称为EPC(Edge psoition control),以下简称EPC。
我们将用两个电眼检测材料中心来纠偏的纠偏系统成为CPC(Center position control),以下简称CPC。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
成型机E+L-SVS纠偏系统
安装调试手册
目录:
一,纠偏系统的组成
二,纠偏系统的安装
三,纠偏系统的配线
四,纠偏系统的调试方法
五,常见故障分析
六,纠偏系统的区块图
一、纠偏系统介绍
成型机SVS定中纠偏系统零件:
图1,马达外型图图2,电眼外型图图3,电眼线外型图
图4 ,反光板外型图图5,接近开关外型图图6,接近开关固定座外型图
图7,控制器外型图图8,电眼安装支架外型图
二、纠偏系统安装
1、马达安装方法
首先将马达(马达料号:NR:230567)延长至机械长度(M=355mm)
安装时,确认马达的机械中心与导正架(滑轨)的机械中心重合。
2、接近开关安装方法
确认一下两点后再安装接近开关: A, 马达
的机械长度M正好处在355mm。
B,导
正辊处的滑块位于滑轨的中心处。
,
安装方法:在马达机械长度(M=355mm)状态下,安装铁片边缘在接近开关中间位置,安装高度2-3mm 即可
目的:在马达行进过程中,只有一次信号切换,通过计算与接近开关的位置,达到快速回中的目的
3、系统配线见附件
注意PLC输给E+L纠偏的控制信号与E+L纠偏的电源要共用零点
三,纠偏的调试步骤
检查E+L
电源线和信
号线是否为
24VDC,确
认没问题
后,上电。
1、根
据马达对RK4004 设定参数(按照以下方法进行检查,若参数不对,则修改)
首先、安装不松手,按一下,显示。
0,继续按,至显示。
3,然后松开,此时显示0,再按至42,完成解锁功能。
其次----设定参数
(1)按住不松手,显示。
4 , E+L
(2)按住不松手,按至13(纠偏灵敏度),松开,按将其至3.0
(3)按住不松手,按至16(自动速度),松开,按至20(4) 17参数为回中速度
(5)按住不松手,按至24(电机方向),松开,按至1
(6)按住不松手,按至25(电机总行程),松开,按至100
(7)按住不松手,按至26(电机正行程),松开,按至30
(8)按住不松手,按至27(电机负行程),松开,按至-30
(9)按住不松手,按至34(编码器解析度),松开,按至8
(10)按住不松手,按至35(减速比),松开,按至8(11)按住不松手,按至36(螺杆牙距),松开,按至5
(12)按住不松手,按至48(最大电机转速),松开,按至2750
(13)按住不松手,按至50(速度_P),松开,按至2.0(14)按住不松手,按至51(速度_I),松开,按至0.1(15)56 电流 4A(2.9时报警Err3)
(16)按住不松手,按至57(电机电流),松开,按至2.9
(17)按住不松手,按至81(马达极限信号),松开,按至2
(18)按住不松手,按至83(回中开关信号),松开,按至-3
(19)按住不松手,按至84(自动信号),松开,按至14
(20)按住不松手,按至85(对中信号),松开,按至11(更改为15)
(21)按住不松手,按至86(手动信号),松开,按至15(更改为11)
(22)97#参数0801
(23)按住不松手,按至99(选择双电眼工作),松开,按至1
(24)按住不松手,按至3,松开,按至10(给电机做初始化)
(25)按住不松手,按
此时,执行马达初始化,初始化后,按照上述方法,检查30,31号是否为0。
如果大于5,将30,31 均清0,此时马达回到机械长度,然后调节接近开关铁片位置,使铁片位置介于接近开关指示灯亮与不亮之间,并将26,27 分别设置成30.,-30即可
2,检查电眼的地址,顺着材料运行的方向看右侧电眼地址为0.1, 左侧电眼地址为0.2. ,其中0 为群组号,1或者2为设备号。
如上图,同时按住DEV键和GRP键,约20秒以后电眼指示灯上有两个灯在常亮,后松开DEV键和GRP键,其中红色区域为电眼的群组号,蓝色区域为电眼的设备号。
对于右侧电眼,按动GRP键,将群组号的指示灯跳到0,之后按动DEV键,将设备号调成1。
对于左侧电眼按动GRP键,将群组号的指示灯跳到0,之后按动DEV键,将设备号调成2。
等待几秒后电眼会自动重启,电眼地址修改完毕。
3,测试马达手、自动及对中动作是否正常。
如果马达方向相反,可以更改24号参数,由1改为0
4,参数保存
(1)按住不松手,按至3,松开,按至22(2)按住不松手,按,保存82-99号参数
(3)按住不松手,按至3,松开,按至2
(4)按住不松手,按,保存其他参数
(5)按住不松手,按至3,松开,按至44(6)按住不松手,按,备份所有参数
(7)按住不松手,按至3,松开,按至1
(8)按住不松手,按,系统重启
4、参数恢复
(9)按住不松手,按至2,松开,按至1
(10)按住不松手,按,恢复备份的参数
四,常见故障分析:
对于我司纠偏控制器的故障分析,我们可以根据以下两点:
RT操作面板指示灯意义和 RK4004控制板上的错误码信息。
故障一:电机极限指示灯同时在闪烁,请检查RK4004内是否报ERR13,此故障为电机卡住。
请松开电机接头,检查滑轨是否顺畅。
如果顺畅,按照调试步骤,检查参数是否正
常,若正常,重新给电机做初始化,即可。
故障二:控制板报ERR 10,此故障为电机线断开,检查电机线是否有磨损,或者扯断。
故障三:控制板报ERR 7,此故障为右侧电眼故障;或者ERR 8,则为左侧电眼故障,请检查电眼线是否有断开情况。
如正常。
则可能电眼存在问题。
更换电眼测试一
下。
故障四:操作面板上电眼全遮指示灯和全不遮指示灯同时闪烁,清洁电眼及反光板。
如果还有其他故障,欢迎与我司技术人员联系。
莱默尔(杭州)机电设备有限公司青岛办事处。