二维倾角传感器
BWS2000超高精度全温补数字双轴倾角传感器

发送命令:77 04 00 01 05
标示符 (1byte)
0x77
应答命令:
数据长度 (1byte)
地址码 (1byte)
命令字 (1byte)
0x01
数据域 (0byte)
校验和 (1byte)
标示符 (1byte)
数据长度 (1byte)
地址码 (1byte)
命令字 (1byte)
数据域 (4byte)
0E
数据域 (0byte)
©2013-2014,无锡北微传感科技有限公司
热线电话:400-618-0510
机械特性
连接器 防护等级 外壳材质 安装
产品尺寸
防水航空插座 或 直接引线(1.5M) IP67 铝合金氧化 三颗 M4 螺丝
产品安装
安装时应保持传感器安装面与被测目标面平行,并减少加速度对传感器的影响。可水平安装也可垂直安装 (默认是水平安装),水平安装的用于垂直安装时只能当作单轴传感器使用(与水平面平行的那个轴有效)。 垂直安装的传感器(双轴)购买时需指出。
校验和 (1byte)
发送命令: 77 04 00 1F 23
标示符 (1byte)
0x77
应答命令:
数据长度 (1byte)
地址码 (1byte)
命令字 (1byte)
0x1F
数据域 (0byte)
校验和 (1byte)
标示符 (1byte)
数据长度 (1byte)
0x77
2.9 设置输出角度模式
BWS2000 系列
高精度双轴倾角仪
BWS 2000
产品介绍
BWS2000 是北微传感制造的一款超高精度倾角仪,分辨率 0.0005°,精度 0.001°,温 漂:0.0007°/℃, 是目前行业中最具竞争力的一款产品。产品输出 RS232,RS485 和 CAN 总线多种接口可选,可以方便的集成到用户的使用环境中。产品宽电压工作,量程可选, 输出速率可选,非常灵活方便。
双轴倾角传感器原理

双轴倾角传感器原理
双轴倾角传感器是一种用于测量物体在平面内的倾斜角度的设备。
其原理基于两个轴线相互垂直,分别测量物体在水平和垂直方向上的倾斜角度。
这种传感器通常由两个加速度计组成,一个测量水平方向上的加速度,另一个则测量垂直方向上的加速度。
在使用双轴倾角传感器时,需要将其安装在需要测量的物体上,并通过电路将其与计算机或其他设备连接起来。
当物体发生倾斜时,传感器会检测到加速度变化,并将数据发送至计算机进行处理。
通过对这些数据进行分析和处理,便可以得出物体在平面内的倾斜角度。
双轴倾角传感器广泛应用于各种领域,如建筑、机械、航空航天等。
例如,在建筑领域中,它可以用于监测建筑物的地基沉降情况、墙壁和屋顶的变形情况等;而在机械领域中,则可以用于监测机器运行时的振动情况、工件加工时的精度等。
总之,双轴倾角传感器是一种非常实用的测量设备,其原理简单而有效,应用范围广泛。
随着科技的不断发展,相信它的应用将会越来越广泛,为各行各业带来更多便利和效益。
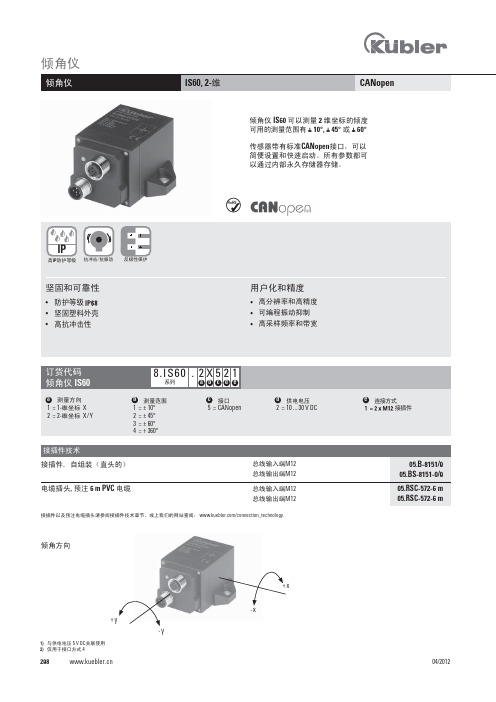
倾角仪 IS60 2-维倾角仪 CANopen 商品说明书
298
04/2012
- x
- y
订货代码倾角仪
IS60
a 测量方向
2 = 2-维坐标 X / Y
1 = 1-维坐标 X 8.IS60系列
.b
测量范围
1 = ± 10°
2 = ± 45°
3 = ± 60°
4 = + 360°
2a
X b 5c 2d 1
e c 接口
5 = C ANopen d 供电电压
2 = 10 ... 30 V DC e 连接方式
接插件以及预注电缆插头请参阅接插件技术章节,或上我们的网站查阅: /connection_technology.
倾角方向
倾角仪 IS60 可以测量 2 维坐标的倾度可用的测量范围有 ± 10°, ± 45° 或 ± 60°传感器带有标准CANopen 接口,可以简便设置和快速启动。
所有参数都可以通过内部永久存储器存储。
接插件
1) 与供电电压 5 V DC 关联使用2) 仅用于接口方式 4
299
04/2012 2 +
1 屏蔽
5 CAN_L
4 CAN_H 2 +
3 -1 屏蔽
5 CAN_L
4 CAN_H 外形尺寸
端子配置
全部技术参数的描述可以查阅网站 上的相关产品手册。
水平角和高度角测量值的二维倾斜改正算法

水平角和高度 角测量值 的二维倾斜 改正算法
李崇辉 ,郑 勇 ,张 超 ,张春 虎 ,郭 谚
( 1 . 信息工程大学 导航 与空天 目标工程学院 , 河南 郑 州 4 5 0 0 0 1 ; 2 . 7 8 1 5 5部 队, 四川 成都
3 . 西安 测 绘 总站 , 陕西 西安 7 1 0 0 5 4 )
2 01 3庄
测 绘 科 学 技 术 学 报
J o u na r l o f Ge o ma t i c s S c i e n c e a n d Te c h n o l o g y
2 01 3 V0 l _ 3 O No . 5
第3 0卷第 5期
文章编号 : 1 6 7 3 . 6 3 3 8 ( 2 0 1 3 ) 0 5 — 0 4 5 2 — 0 4
w h i c h c o u l d c o r r e c t t h e o b s e r v e d v a l u e b a s e d o n a t wo - d i me n s i o n l a g r a d i e n t e r . T h e e x p e i r me n t s i n d i c a t e d t h a t t h e h o r i z o n t l a a n g l e s a n d e l e v a t i o n a n g l e s c o u l d b e c o re c t e d f r o m o b s e r v i n g p l a n e t o h o i r z o n t l a p l a n e ,wi t h o n l y r o u g h -
( 1 . C o l l e g e o f N a v i g a t i o n a n d A e r o s p a c e E n g i n e e r i n g ,I n f o r m a t i o n E n g i n e e r i n g U n i v e r s i t y ,
基于二维传感器通讯控制软件的设计_甘泽民陈丁
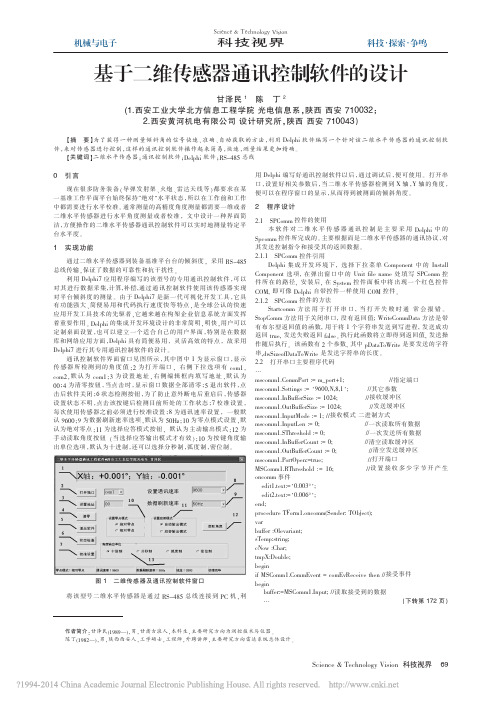
var
buffer :Olevariant;
sTemp:string;
cNow :Char;
tmpX:Double;
begin
if mEvent = comEvReceive then //接受事件
begin
buffer:=MSComm1.Input; //读取接受到的数据
…
(下转第 172 页)
作 者 简 介 :甘 泽 民 (1989— ),男 ,甘 肃 古 浪 人 ,本 科 生 ,主 要 研 究 方 向 为 测 控 技 术 与 仪 器 。 陈 丁 (1982— ),男 ,陕 西 西 安 人 ,工 学 硕 士 ,工 程 师 ,外 聘 讲 师 ,主 要 研 究 方 向 雷 达 系 统 总 体 设 计 。
Component 选 项, 在 弹 出 窗 口 中 的 Unit file name 处 填 写 SPComm 控
件 所 在 的 路 径, 安 装 后, 在 System 控 件 面 板 中 将 出 现 一 个 红 色 控 件
COM, 即可像 Delphi 自带控件一样使用 COM 控件。
2.1.2 SPComm 控件的方法
She can be gentle, can settle housework, can be watched and admired, can listen to the troubles, can operate love, even can occupy a man’s privilege - to provide security services, ignited the bright future of robot business, global sales of various types of robots is about 5.5 million in 2008, and is expected be 11.5 million after two years, indicating that the era robots living in human life and human -robot interaction is coming. Unfortunately, the transfer effect of this pure cyborg film myth on people's attitudes and the effect on value position construction are can't be judged to the present, perhaps the most important point is to wake mortal beings in this un -controllable risk society, the establishment of robots hegemony is very possible.
倾角传感器说明

校验和 (1byte)
数据域 (1byte)
校验和 (1byte)
热线电话:400-618-0510
77
1F
以上信息如有变动,请以实际产品为准,恕不另行通知。谢谢!
©2013-2014,无锡北微传感科技有限公司
热线电话:400-618-0510
2.4 设置相对/绝对零点
发送命令: 77 05 00 05 00 0A 0D 0A
标示符 (1byte)
77
数据长度 (1byte)
地址码 (1byte)
命令字 (1byte)
05
数据域 (1byte) 00: 绝对零点 01: 相对零点
校验和 (1byte)
应答命令:
标示符 (1byte)
77
04: 25Hz Data Rate
05: 50Hz Data Rate
06:100HzDataRate
应答命令:
标示符
数据长度
地址码
命令字
数据域
校验和
(1byte)
(1byte)
(1byte)
(1byte)
(1byte)
(1byte)
77
8C
00: 设置成功
FF: 设置失败
注:设成应答制式,必须接到读角度命令才输出角度。设成自动输出制式则上电就自动输出角度。
标示符 (1byte)
77
数据长度 (1byte)
04
地址码 (1byte)
00
命令字 (1byte)
1F
应答命令:
标示符 (1byte)
数据长度 (1byte)
地址码 (1byte)
命令字 (1byte)
倾角传感器工作原理
倾角传感器工作原理1.气泡级倾角传感器气泡级倾角传感器是最简单和常用的倾角传感器。
它使用一个密闭的圆柱体内部充满了液体,并装有一个漂浮的气泡。
当传感器的底面与水平面垂直时,气泡位于液体表面的中心。
当传感器倾斜时,气泡会偏离中心位置,通过观察气泡的位置可以确定传感器的倾斜角度。
气泡级倾角传感器适用于需要测量较小角度范围的应用。
2.电容倾角传感器电容倾角传感器利用电容的变化来测量倾角。
它由两个平行板构成,当传感器垂直于地面时,电容的值最大;当传感器倾斜时,电容的值会随着倾斜角度的增加而减小。
电容倾角传感器可以通过测量电容的变化来确定物体的倾斜角度。
3.反射式倾角传感器反射式倾角传感器基于光学原理工作。
它通过发射一束光束,并通过光电接收器接收反射光束的信号来测量倾角。
当传感器垂直于地面时,光束会在相反方向上反射;当传感器倾斜时,光束的反射方向会发生变化。
通过测量反射光束的变化,可以确定传感器的倾斜角度。
4.振动陀螺仪倾角传感器振动陀螺仪倾角传感器使用陀螺仪的原理来测量倾角。
陀螺仪是一种能感知和测量角动量的设备。
当传感器倾斜时,陀螺仪受到的角动量也会相应变化。
通过测量陀螺仪的输出信号,可以计算出传感器的倾斜角度。
振动陀螺仪倾角传感器适用于需要测量较大角度范围的应用。
倾角传感器的选择和应用取决于具体的需求。
不同的传感器有不同的精度、测量范围和工作环境要求。
在实际应用中,根据需要选择合适的倾角传感器对于保证测量的精度和稳定性非常重要。
同时,倾角传感器也可以与其他传感器和控制器结合使用,以实现更复杂的自动控制系统。
双轴倾角传感器原理

双轴倾角传感器原理一、引言双轴倾角传感器是一种常用的测量设备,用于测量物体在二维平面上的倾斜角度。
它广泛应用于工程、航空航天、建筑等领域。
本文将详细探讨双轴倾角传感器的原理、工作原理以及应用场景。
二、传感器原理双轴倾角传感器基于加速度计原理,利用重力加速度与传感器的倾斜角度之间的关系进行测量。
其工作原理可以分为四个步骤:2.1 加速度计双轴倾角传感器内部搭载了微机电系统(MEMS)加速度计。
加速度计通过检测物体的加速度来推导出倾斜角度。
常见的加速度计类型包括电容式加速度计和压阻式加速度计。
2.2 重力加速度测量当传感器处于水平位置时,重力对加速度计产生的作用相对较小,可以忽略不计。
但当传感器被倾斜时,重力将会使加速度计产生一个分量,该分量与倾斜角度成正比。
2.3 电子信号转换传感器将加速度计测量到的重力加速度转换为相应的电子信号。
通常使用模拟-数字转换器(ADC)将模拟信号转换为数字信号。
2.4 角度计算传感器根据已转换的数字信号计算出物体的倾斜角度。
常见的算法包括三角函数算法和卡尔曼滤波算法。
三、工作原理双轴倾角传感器通过使用两个加速度计分别测量物体在水平和竖直方向上的倾斜角度,从而得出物体的二维倾斜角度。
其具体工作原理如下:3.1 水平方向倾斜角度测量传感器通过与水平面平行放置的加速度计测量物体在水平方向上的倾斜角度。
当物体向左倾斜时,水平方向受到的重力加速度会增加;当物体向右倾斜时,水平方向受到的重力加速度会减小。
3.2 竖直方向倾斜角度测量传感器通过与竖直方向平行放置的加速度计测量物体在竖直方向上的倾斜角度。
当物体向上倾斜时,竖直方向受到的重力加速度会增加;当物体向下倾斜时,竖直方向受到的重力加速度会减小。
3.3 综合计算将水平方向和竖直方向的倾斜角度综合计算,就可以得到物体的二维倾斜角度。
这一计算通常使用三角函数算法或卡尔曼滤波算法。
四、应用场景双轴倾角传感器在众多领域都有广泛应用,下面列举几个常见的应用场景:4.1 工程测量双轴倾角传感器可以用于测量建筑物的倾斜度、道路的坡度等。
倾角传感器使用说明书
倾角传感器使用说明书一. 产品特点1.通过硅微机械传感器测量以水平面为参面的双轴倾角变化。
2.数据通讯RS232接口。
3.通过串口指令标定倾角水平零点。
4.开极电极角度门限输出。
二.产品描述***是双轴倾角传感器,通过测量静态重力加速度变化,转换成倾角变化。
测量输出传感器相对于水平面的倾斜和俯仰角度。
传感器附带角度开关量检测输出。
输出方式开极电极。
传感器角度响应速度5次/秒。
三. 要技术指标1.常规模式时主要指标(环境温度=20℃,电源=+12V)输出速度5次/秒单位测量范围双轴±60度分辨率±0.02 度精度(<±30°) <±0.3 度精度(<±60°)<±0.5 度非线性 ±1%重复性 ±0.05 度温度漂移 0.05°/℃2.其它指标(测试温度=20℃)3.工作参数极限值(注意:长期工作在极限参数条件下,将导致产品永久性不可恢复性损坏)最小最大单位工作温度-40 +100 ℃四.输出数据格式XW QJ02-01S上电工作后,等待命令,命令格式和输出格式如下:1.发送命令格式:字节位置 含义 数据 说明1,2 帧头 0xAA 0XAA3 数据长度 0x04 除帧头外数据长度4 传感器地址 0Xxx 232输出方式地址为25 命令 0x01 命令罗盘输出数据帧6 效验字 前面全部数据的异或结果2.接收输出格式:字节位置 含义 数据类型 说明1,2 帧头 0xAA,0xAA3 帧长 字节 除帧头外全部数据长度4 地址 字节 0Xxx(232输出方式地址为2)5 命令返回 字节 接收到的命令字返回6,7 保留8,9 保留10,11 X轴角度 整数 角度=整数/100(单位:度)*12,13 Y轴角度 整数 角度=整数/100(单位:度)14 保留15 校验 字节 前面14字节数据的异或效验结果 *注释说明:标准双字节整数,最高比特位=0,表示正数,最高比特位=1,表示负数。
二维风速风向传感器原理

二维风速风向传感器原理一、引言随着气象监测和环境研究的快速发展,风速风向传感器的应用越来越广泛。
二维风速风向传感器作为一种先进的测量设备,能够同时获取风速和风向两个维度的数据,对于气象预报、空气质量监测、风力发电等领域具有重要意义。
本文将详细阐述二维风速风向传感器的原理、应用场景及发展趋势。
二、二维风速风向传感器原理二维风速风向传感器主要通过测量风力作用在物体上的力矩来实现对风速和风向的测量。
它通常由一个旋转轴和一对力臂组成。
当风吹向传感器时,风力作用在力臂上,产生力矩,使旋转轴发生偏转。
通过测量旋转轴的偏转角度,可以计算出风速和风向。
具体来说,二维风速风向传感器的工作原理如下:1.当风吹向传感器的力臂时,力臂受到风力的作用,产生力矩,使旋转轴发生偏转。
2.旋转轴的偏转角度与风速和风向有关,通过测量偏转角度,可以计算出风速和风向。
3.为了实现精确测量,传感器通常采用电子陀螺仪和加速度计等高精度测量设备来辅助测量。
三、二维风速风向传感器的应用二维风速风向传感器在多个领域得到广泛应用,以下是几个典型的应用场景:1.气象监测站:二维风速风向传感器是气象监测站的重要组成部分,用于监测气象要素,如风速、风向、温度、湿度等。
这些数据对于天气预报、气候变化研究等具有重要意义。
2.空气质量监测站:空气质量监测站使用二维风速风向传感器来监测空气质量,通过测量风速和风向,可以计算出空气污染物的扩散情况,为空气质量预报提供数据支持。
3.风力发电场:在风力发电场中,二维风速风向传感器用于测量风速和风向,以优化发电机的运行效率。
通过实时监测风速和风向数据,可以确保发电机在最佳状态下运行,提高发电效率。
4.环境保护:二维风速风向传感器在环境保护领域也发挥了重要作用。
例如,在排放气体的工厂周围布置传感器,可以监测气体排放情况,为环保政策的制定提供数据支持。
四、发展趋势及挑战随着科技的不断发展,二维风速风向传感器在精度、稳定性和可靠性等方面取得了显著进步。
BWS2000超高精度全温补数字双轴倾角传感器

2.4 设置相对/绝对零点
©2014-2015,宁波麦思电子科技有限公司 热线电话:400-618-0510
发送命令: 77 05 00 05 00 0A
标示符 (1byte) 0x77 数据长度 (1byte) 地址码 (1byte) 命令字 (1byte) 0x05 数据域 (1byte) 0x00: 绝对零点 0x01: 相对零点 校验和 (1byte)
应答命令:
标示符 (1byte) 0x77 数据长度 (1byte) 地址码 (1byte) 命令字 (1byte) 0x85 数据域 (1byte) 0x00: 设置成功 0xFF: 设置失败 校验和 (1byte)
注:如果设成绝对零点,则测量角度以芯片的零点为基准. 如果设成相对零点,则测量角度以当前位置为零点基准. 传感器的最大能测角度与设置零点有关
注: 0x00 表示 2400 0x01 表示 4800 波特率
0x02 表示 9600 0x03 表示 19200,0x04 表示 115200,默
认值为 0x02:9600.每次变更通讯波特率成功之后,会以原波特率发送回应答命令,然后立即改变设备通信 备注:如果需要高频输出,请将波特率设为 115200。
注:数据域为 4 字节返回角度值,为压缩 BCD 码,S 为符号位(0 正,1 负)XXX 为三位 整数值, YYYY 为四位小数值。 其他轴数据与此相同 。 如 10 26 87 60 表示-026.8760 度。
2.2 读 Y 轴角度
发送命令: 77 04 00 02 06
标示符 (1byte) 0x77 ©2014-2015,宁波麦思电子科技有限公司 数据长度 (1byte) 地址码 (1byte) 命令字 (1byte) 0x02 热线电话:400-618-0510 数据域 (0byte) 校验和 (1byte)
双轴倾角传感器原理

双轴倾角传感器原理
双轴倾角传感器(Dual-axisInclinometer)是一种用于测量坡度和倾斜测量器,它是一种利用加速度传感器(accelerometer),由X、Y轴上的一组加速度传感器组成,可以检测X、Y轴方向上的倾斜倾角。
双轴倾角传感器可以在两个不同方向上测量倾斜角度,常用于地质勘探、航空运输、海洋运输、军事航空、汽车和船检测等应用场合。
原理:
双轴倾角传感器采用加速度传感器,它利用加速度测量X、Y轴方向上的倾斜倾角。
加速度传感器可以相对计算得到X轴和Y轴上的倾斜倾角,然后根据这些数据可以确定物体倾斜的状态。
双轴倾角传感器的优势:
1、准确性:双轴倾角传感器由X、Y轴上的一组加速度传感器组成,它们的测量准确度较高,可以满足高精度应用的要求。
2、灵敏性:双轴倾角传感器在测量倾斜角度时,数据收集速度更快,精度也更高。
3、稳定性:双轴倾角传感器结构紧凑,在惯性、温度和外界干扰方面的稳定性较强。
4、易于维护:双轴倾角传感器的维护和维修方法简单,而且它不需要拆卸和更换零件,可以减少维护成本。
- 1 -。
MEMS倾角传感器PPT课件
电容式加速度微传感器
电容式加速度传感器具有温度效应小,功率损
耗低,灵敏度相对较高(可达),结
构比较简单,加工工艺不复杂等突出优点,同
时,动态特性好,抗过载能力强。但外界加速
度仅能引起微小的电容变化(通常在10-15量级
甚至更低),测试方法复杂。
电容式加速度微传感器工作原理
足机械特定需求的数字式角度测量装置。
END
Thanks!
的过程中,依次经过下部和上部的热线。若忽略气体上升过程
中克服重力的能量损失,则穿过上部热线的气流已经与下部热
线的产生热交换,使穿过两根热线时的气流速度不同,这时
V2′>V2,因此流过两根热线的电流也会发生相应的变化,所
以电桥失去平衡,输出一个电信号。
固、液、气体摆性能比较
在重力场中,固体摆的敏感质量是摆锤质量,液体摆的敏感质
体积小、功耗低、响应速度快和高可靠的传
感元件, 已经广泛应用于工程机械领域。
倾角传感器分类及其原理
根据原理分类
“固体摆”式倾角传
感器
倾角传感器
“液体摆”式倾角传感
器
“气体摆”式倾角传感
器
“固体摆”式倾角传感器
固体摆在设计中广泛采用
力平衡式伺服系统,如图
所示,其由摆锤、摆线、
支架组成, 摆锤受重力G
目录
➢
➢➢➢➢来自倾角传感器简介倾角传感器分类及其原理
电容式加速度微传感器
倾角传感器测量原理
总结
倾角传感器简介
在建筑施工或道路铺修中, 经常要对工程机
械或机架装置进行调平校准, 并且要对施工
质量进行检测, 这时遇到最多的问题就是水
倾角传感器说明

倾角传感器简介3.1 倾角传感器的分类与比较倾角传感器经常用于系统的水平距离和物体的高度的测量,从工作原理上可分为固体摆式、液体摆式、气体摆式三种倾角传感器,这三种倾角传感器都是利用地球万有引力的作用,将传感器敏感器件对大地的姿态角,即与大地引力的夹角(倾角)这一物理量,转换成模拟信号或脉冲信号,他们的原理分别介绍如下:3.1.1 固体摆式倾角传感器固体摆在设计中广泛采用力平衡式伺服系统,如图1所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力F为:(1)式中的θ为摆线与垂直方向的夹角。
在小角度范围内测量时,可以认为F与θ成线性关系。
如应变式倾角传感器就是基于此原理。
3.1.2液体摆式倾角传感器液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等,如图2所示。
当壳体水平时,电极插入导电液的深度相同。
如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI3所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI减少,即RI>RIII。
反之,若倾斜方向相反,则RI<RIII。
增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII和RIII。
若液体摆水平时,则RI=RIII。
当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。
在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
3.1.3 气体摆式倾角传感器气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。
“气体摆”式惯性元件由密闭腔体、气体和热线组成。
新型二维水平传感器

圈 I 弹 性 簧 片 结构
化的 自动测 量 系统 直 接连 接 起 来 工 作 其 他几 种 水
平传感 器也 有类 似 的 种 种 缺 点 , 能 满 足 现代 测 量 不
仪器 的需要 , 其是 大地 测 量 仪器 对 体 积 小 的 高精 尤 度二 维水平 传感 器 的 要求 本 文 提 出 的新 型水 平 传
YU — u He W
tC / g o/ e e P  ̄/n k cl dT k . mg X  ̄ a 柄 啊 , ~ o n /{心 209 1 0 7一 『 矾Ab ta t sr c
A P tp fhg — rcso ek rt — i e so a oie tlS l O sd srb d w ih gv sa DC nw y e o ih p e iin sl o wod m  ̄ in lh r na el ri ec e hc ie s z S i
簧片 支撑 挂 在弹性 簧片 的下方 , 与簧 片刚性 连 悬 且
接 因此 , 弹性 簧 片应 具 有 二 维 自由度 . 虑 到上述 考 因素 , 我们将 弹性 簧 片 的 结 构设 计 成 十 字 型簧 片 形 状( 见图 1 , ) 该十 字型 簧 片具有 二维 自由 度 . 弹性 簧 片 中心 圆 L 乎 衡 板 剐 性 连 接 ( 图 与 见
1 , 片通过外 圈 4个 圆孔 固定 在 水 平 传感 器 壳 体 )簧
高峰插旗

工程认识创意报告小组组长:毕磊讲解:王成龙小组成员:李松岩高婧徐枭飞盛守刚高峰插旗一、装置概况:本装置主要采用机电控制系统,以探索机器人为主体进行水平运动登上山峰,通过机械手臂的旋转和竖直运动来实现高峰插旗的过程。
二、部件说明:1、探索机器人:世界中不为人知的领域需要用到探索机器人来完成测量距离、追踪轨迹等任务。
它能够识别颜色,测量温度,躲避障碍物,识别白天和黑夜。
温度系数传感器、光敏传感器、超声波距离传感器、红外线传感器、彩色传感器以及特殊的轨道传感器都是它的标准装备。
在两个大功率电动马达和履带驱动的作用,即使崎岖不平的路面也可畅行无阻,因此登山任务可以完成。
2机械手臂:机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势,拥有升降、伸缩、旋转等独立运动方式。
使用强有力的机构可以使其轻松将旗插入山顶。
3太阳能电池板:太阳能电池板是太阳能发电系统中的核心部分,其作用将光能转化为电能送往蓄电池中存储起来推动负载工作。
4传感器:二维倾角传感器:倾角传感器是高性价比的双轴倾角传感器,测量输出传感器相对于水平面的俯仰和横滚角度。
具有低功耗、外观小巧、结构简单、工作稳定性高、温度范围宽、温度漂移低等优点。
5电子气压表气压表测量原理就是通过测量气压,计算出高度值,与原先输入的山的高度数据比较确定登上山顶。
三、步骤说明:1、在山下将当日山·。
2、启动太阳能电池板为机器人提供电能,机器人开始工作。
3、将国旗放入机械手,水平固定。
4、机械手臂持有国旗在探索机器人带动下向山峰水平移动。
5、当机器人上的二维倾角传感器感应到坡度时增大马达的输出功率,机器人开始爬坡,随倾角加大增大输出功率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
◆卫星通信车天线姿态测量 ◆医疗器械 ◆纺织机器
产品订购信息
MCQ I420 B X XXX
1
2 34 5
◆机器人姿态控制 ◆基于倾斜角的方向控制 ◆吊车、起重机、挖掘机等工业设备
1.倾斜角系列 4.测量范围
2.电流输出 5.外壳型号
3.版本号
-1-
MCQI420B
极限工作参数
参数
最小
最大
单位
工作电压
产品选型表
型号 输出方式(mA) 测量精度(度) 二维
MCQI420A MCQI420B
4~20 4~20
±0.1
是
±0.1
是
清零功能 有 无
4
产品安装
MCQI420B
安装时使传感器下表面与被测目标面很好地贴合,并固定牢固,以避免因安装问题而造 成的测量误差。
+X
-X
+Y
-Y
产品机械尺寸(8850 型外壳)
8
29
V
电源反向保护
40
V
工作温度
-40
85
℃
存储温度
-40
125
℃
注:超过极限参数,容易造成传感器损坏或无法正常工作,测量失准。
技术规格
参数 分辨率(1) 精 度(1)
温度漂移 零点偏移 输出频率 测量范围 输出信号 噪声 噪声 反向保护 信号非线性 负载电阻 抗冲击 工作电源
VCC ICC 反向保护 重量 使用温度 存储温度 防护等级
信号输出
MCQI420B 型倾斜角传感器标准输出信号范围为 4~20mA。为满足客户的特殊需求,输出 信号范围可选择 0~20mA 或 0~24mA。
MCQI420B 型倾斜角传感器的信号输出级有反向保护二极管,其反向击穿电压达 40V,可 防止因信号线误接至电源(VCC)而损坏信号输出级。工业环境可能使信号输出级遭受更高的瞬 态电压,因此,为了更好地保护传感器,可能需要外加瞬态电压抑制(TVS)等保护措施。
工作电源
图 1 滤波电路
MCQI420B 型倾斜角传感器具有很宽的供电电压范围:8V~28V。当电源线路连接或断开时 可产生 25~60V 的尖峰脉冲电压,容易造成传感器电路系统损坏。MCQI420B 型倾斜角传感器 电源输入端的保护措施,可有效地抑制这类尖峰脉冲的干扰,使传感器电路系统安全可靠地 工作。电源供电系统有反向保护二极管,反向保护电压达 40V。
负载电阻为 240Ω,没有滤波时噪声峰-峰值达 13mV。采用如图所示滤波电路及参数,信 号噪声峰-峰值降到最大 4mV。滤波电阻和电容的值越大,滤波效果越好,但信号响应速度降 低。根据实际应用情况,选择合适的滤波电路参数。
3
Iout
LOAD 240
R 15K
VOUT
C 0.1uF
MCQI420B
℃
IP66
测试条件/注释 -75°~+75° -90°~+90°
-30~+85℃
默认 RLOAD=240Ω
TA= 25℃
TA= 25℃ VCC=24V 无负载
-2-
电气连接
MCQI420B
线色 功能
测量性能
红色 VCC 电源正极
黑色 GND 电源负极
白色 X 轴信号
棕色 Y 轴信号
MCQI420B 型倾斜角传感器标准配置时满量程为±90°,可根据客户的需求,缩小测量范 围。测量范围在±75°以内时,测量误差不超过±0.1°,测量范围大于±75°时,测量误差 不超过±0.2°。零点偏移最大不超过±0.1°。
MCQI420B
产品概述
MCQI420B 是一款高精度、低温漂、电流输出型二维倾角传感器。产品采用最新技术微机 电生产工艺倾斜角单元,测量出传感器相对于水平面的倾斜度。
产品设计精密,使用微处理器修正传感器线性度,并进行温度补偿,使传感器拥有出色 的测量精度和极低的温度漂移量。工作温度达工业级别-40℃~+85℃,是一款性价比超高的 倾斜角传感器。
单位:mm
了解更多产品,请关注公司网站:
5
为保证使用安全,本产品的供电电路有反向保护,有效防止供电错误而导致传感器工作 失常。
主要特性
◆双轴测量
◆量
程:±90°(最大)
◆量程可选
◆高 精 度:±0.1°(典型)
◆低 温 漂:±0.004°/℃(最大)Байду номын сангаас
◆长期稳定性:小于 0.02°
产品应用
◆零点偏移:±0.1°(最大) ◆高 抗 振:>20000g ◆输出信号:4~20mA(默认) ◆工作电压:8V~28V ◆反向保护:40V(Max) ◆工作温度:-40℃~+85℃
不同的温度环境下,传感器输出信号随温度的变化,影响传感器测量精度。MCQD485B 型 倾斜角传感器采用微处理器对传感器原始信号进行温度补偿,使其在-30℃~+85℃范围内, 温漂小于±0.004°/℃。
信号输出频率
MCQI420B 型倾斜角传感器数据输出频率典型为 8Hz,即每 62.5ms 输出一次数据。由于数 据采集和处理的需要,每次数据输出中只有一个通道的数据更新,即 X 轴和 Y 轴的数据交替 更新,故每个通道实际的数据输出速率(更新速率)为 4Hz。
最小值
-90 4 -0.06 20000
典型值 0.02 ±0.1 ±0.2
±0.004 ±0.1
8
最大值
90 20 13 4 40 0.06 1000
单位
Deg
Deg /℃ Deg Hz Deg mA
mV/VP-P mV/VP-P
V %FS Ω g
8
28
V
25
mA
40
V
200
g
-30
85
℃
-40
125