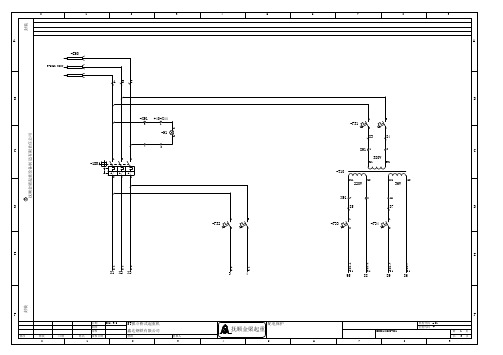
德国进口液压抓斗电气控制原理图
5T抓斗原理图
-S13
12
D
29
E -K0 4
A1 A2 1.5 1 3 5 13 23 2 4 6 14 24 /2.1 /2.1 /2.2 /3.2 /3.5
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 3 3 页 页
C35 X31 =12/1.3 X21 =12/1.3 X11 =12/1.3
C34
C15
E
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 2 3 页 页
517
5 5 21
521
6 6 21
525
7 7 21
17
17
K03
/3.5 18
K04
/3.6 18
K11
/2.2 22
K22
/2.4 22
K12
/2.4 22
C
C 529 531
-07LJ1
/1.1 12
511
A1 11
519
523
A1
527
-K1
-07LJ2
/1.1 12 11
W
PE
C
抓斗起重机全变频PLC-DP控制电路图

TB-2512 TC-608 TC-1003 YBLX19-111/TC40-220V Φ200;~220V CDBR-4030B SJ700-300HFEF2 SJ700-055HFEF2 SKSG-100A/5V SKSG-20A/5V LC1-D12 M7C LC1-D12 M7C RXM2LB2P7+RXZE1M2C RXM2LB2P7+RXZE1M2C C32N/3P+OF C10 C32N/3P+OF C10 NSC100S3080 NSC60E3016
16 -X92
15 -X92
14 -X92
13 9S02/9E02
12 9MF2
11 2UB1.2UB2
10 1UB1.1UB2
9 1U.2U
8 1ZL.2ZL
7 2K7.2K8
6 1K7.1K8
5 2KA1~2KA6
4 1KA1~1KA6
3 2Q2.2Q3
名
绍兴起重机总厂
称
SHAOXING MASTER CRANES FACTORY
质量
+A3 大,小车组合控制柜 [现场调试完毕出线胶圈孔用填料密封]
电气设备(元件)明细表
比例
图
号
QZ 11.1031.4.2
张数
3
张次
2
20
19
18 9X05
17 9X3~4
16 9X31
15 9Q3
14 9Q2
13 9Q4
9 PLC
8 PLC
7 PLC
6 PLC
5 PLC
4 1K01~4K04
3 UR1~UR4
2 ZL1.ZL2
1 Q01~Q04
液压遥控抓斗

液压遥控抓斗作者:叶俊年来源:上海格鲁博机械有限公司液压遥控抓斗(又称:无线遥控抓斗)是一种配在单卷筒起重机下的取物装置,用于装卸矿粉、煤炭、粮食、化肥、工业盐、氧化铝等各种散货。
无线遥控抓斗巧妙地将无线遥控技术和最简单的液压技术结合应用在抓斗上,使抓斗有了独特性能(图1)。
液压遥控抓斗的原理:抓斗自带封闭的液压系统,液压系统由无线遥控装置来控制电磁阀,通过电磁阀换向来控制油缸上下腔的变化,油缸的缸体下端与抓斗的下承梁连接在一起,油缸的活塞杆上端与抓斗滑移座连接在一起。
当抓斗处在打开状态,要抓取货物,松抓斗钢丝绳,在滑移块重量带动下,活塞杆被压进缸体内,这时,按一下遥控器,让油缸上下腔的油路关闭,锁住了滑移座,使滑移座与下承梁连为一体,提升钢丝绳,抓斗抓取货物。
当抓斗处在闭合状态,要释放货物,只要按一下遥控发射器,控制电磁阀得电,液压系统油路打开,滑移块将油缸活塞杆拔出,顶住上承梁,抓斗打开释放货物。
当遥控抓斗是用于装车或装漏斗的工况,有时不需要一下子将抓斗全部打开,只要在抓斗开到所需要的大小时,按一下遥控发射器,控制电磁阀得电,液压系统油路关闭,抓斗就开多大。
抓斗开启过程中可以按人的意愿任意停顿。
液压遥控抓斗的优点:1.节能(与电动液压抓斗比):电动液压抓斗工作时需要大量耗电。
而遥控抓斗不需要消耗大量的电,只需要很少的带动电磁阀移动的脉冲电。
2.效率高(与落地打开式抓斗比):遥控抓斗在船舱口就能打开,不需要像落地打开式抓斗那样抓斗必须下降到物料上才能开斗,大大缩短了工作时间。
3.安全可靠(与手拉式抓斗比):遥控抓斗直接挂在克令吊上,没有其它的附件,抓斗打转不影响使用,不像手拉式抓斗还拖了根细钢丝绳,抓斗打转,使手拉钢丝受力,抓斗就会打开。
4.工作平稳(与手拉式、落地式抓斗比):手拉式抓斗和落地式抓斗的开闭机构为了实现开斗,机械上不得不留有移动的间隙,这种间隙开斗一瞬间就产生冲击,如果这种间隙没有调整好,冲击力能使克令吊都“发颤”,即使抓斗上设有缓冲油缸也没有用。
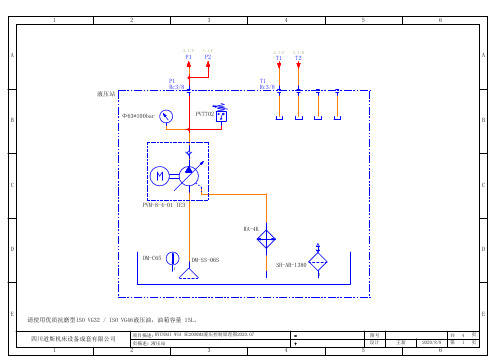
WIA SE2000MA液压控制原理图2020.07
四川道斯机床设备成套有限公司 1
项目描述:HYUNDAI WIA SE2000MA液压控制原理图2020.07
页描述:液压站
2
3
=
+
4
C
D
E
图号 设计
5
王新
共 4 页 2020/8/8 第 1 页
6
1
2
3
4
5
6
A
A
电磁换向阀
SA-G01-C5-GR-D2-C30
AB
电磁换向阀 SA-G01-C5-GR-D2-C30 A B
6
C
B1 Rc3/8
A1 Rc3/8
D
EWS 12位 伺服动力刀塔
B
A
转位/动力头转换 E
四川道斯机床设备成套有限公司 1
项目描述:HYUNDAI WIA SE2000MA液压控制原理图2020.07
页描述:刀架
2
3
=
+
4
D
B
A
松开/夹紧油缸 E
图号 设计
5
王新
共 4 页 2020/8/8 第 2 页
YV66B SOL B
YV66A
PT
SOL A
YV16B SOL B
YV16A
PT
SOL A
B
B
单向节流阀 OCY-G01-B-Y-20
单向节流阀 OCY-G01-B-Y-20
DY.HYD
1.3:A / P1
Rc3/8 P1
C
1.4:A / T1
Rc3/8 T1
安装于床身
B2 Rc3/8
常用液压件原理及图示

压力继电器压力继电器压力继电器是利用液体的压力来启闭电气触点的液压电气转换元件。
当系统压力达到压力继电器的调定值时,发出电信号,使电气元件(如电磁铁、电机、时间继电器、电磁离合器等)动作,使油路卸压、换向,执行元件实现顺序动作,或关闭电动机使系统停止工作,起安全保护作用等。
压力继电器有柱塞式、膜片式、弹簧管式和波纹管式四种结构形式。
下面对柱塞式压力继电器(见图)的工作原理作一介绍:柱塞式压力继电器当从继电器下端进油口3进入的液体压力达到调定压力值时,推动柱塞2上移,此位移通过杠杆放大后推动微动开关4动作。
改变弹簧1的压缩量,可以调节继电器的动作压力。
应用场合:用于安全保护、控制执行元件的顺序动作、用于泵的启闭、用于泵的卸荷。
注意:压力继电器必须放在压力有明显变化的地方才能输出电信号。
若将压力继电器放在回油路上,由于回油路直接接回油箱,压力也没有变化,所以压力继电器也不会工作。
电磁阀电磁阀是用来控制流体的方向的自动化基础元件,属于执行器;通常用于机械控制和工业阀门上面,对介质方向进行控制,从而达到对阀门开关的控制。
工作原理电磁阀里有密闭的腔,在不同位置开有通孔,每个孔都通向不同的油管,腔中间是阀,两面是两块电磁铁,哪面的磁铁线圈通电阀体就会被吸引到哪边,通过控制阀体的移动来档住或漏出不同的排油的孔,而进油孔是常开的,液压油就会进入不同的排油管,然后通过油的压力来推动油缸的活塞,活塞又带动活塞杆,活塞杆带动机械装置动。
这样通过控制电磁铁的电流通断就控制了机械运动。
溢流阀定压溢流作用:在定量泵节流调节系统中,定量泵提供的是恒定流量。
当系统压力增大时,会使流量需求减小。
此时溢流阀开启,使多余流量溢回油箱,保证溢流阀进口压力,即泵出口压力恒定(阀口常随压力波动开启)。
安全保护作用:系统正常工作时,阀门关闭。
只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加(通常使溢流阀的调定压力比系统最高工作压力高10%~20%)。
国外挖掘机液压原理图汇总

利勃海尔#$%&型履带式挖掘机液压原理图日立#$%&’())型履带式挖掘机简介#$%&’())型履带式挖掘机是日本日立(*&+$,*&)建机公司于())-年-(月开始向国内外市场推出的具有随机监控功能的信息型挖掘机。
#$%&’是.轴之意,是继/轴、0轴之后的第三坐标轴,表示自由描绘未来空间的创造力。
#$%&’())型挖掘机与1%())—2型挖掘机相比,结构上有了很大的改进,性能上有了很大的提高。
一、缩短了施工周期,提高了生产率(-)当动力模式都是*34时,1%())52型挖掘机的作业量为-267’38,燃料消耗量为(!96:38,单位油耗作业量为;9!7<3:,而#$%&’())型挖掘机分别为-=>7<38、(29-:3 8和=9-7<3:。
#$%&’())型挖掘机的生产率与1%())52型挖掘机相比提高了-(?。
(()#$%&’())型挖掘机的发动机采用中冷器后,发动机功率增加了<@A。
当动力模式为*34时,发动机功率从-)=@A增加到--)@A。
当动力模式为4时,发动机功率从669<@A增加到-)<@A。
(<)#$%&’())型挖掘机加大了液压缸的直径,使斗杆挖掘力提高-)?,铲斗挖掘力提高-(?。
正常挖掘时,1%())52型挖掘机的铲斗挖掘力为-(=@B,斗杆挖掘力为6<@B,而#$%&’())型挖掘机分别为-!<@B和-)<@B。
当强力挖掘时,1%())52型挖掘机的铲斗挖掘力为-<!@B,斗杆挖掘力为66@B,而#$%&’())型挖掘机分别为-2-@B和-)6@B。
(!)#$%&’())型挖掘机采用了新型回转装置,并提高了液压效率,使回转力提高--?,回转压挤性能和坡地作业的回转性能都得到了提高。
当动力模式为一般模式,铲斗满斗,铲斗底部高度为;9(7时,测量6)C回转和动臂提升所需要的时间,1%())52型挖掘机为<96D,#$%&’())型挖掘机为<9=D。
液压原理图
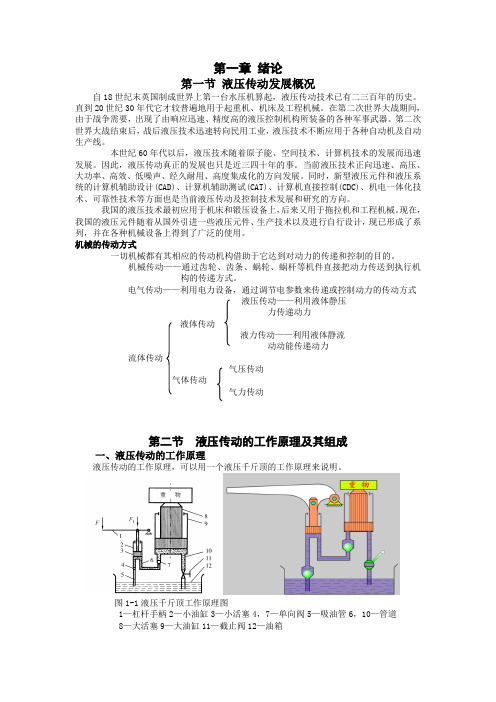
第一章绪论第一节液压传动发展概况自18世纪末英国制成世界上第一台水压机算起,液压传动技术已有二三百年的历史。
直到20世纪30年代它才较普遍地用于起重机、机床及工程机械。
在第二次世界大战期间,由于战争需要,出现了由响应迅速、精度高的液压控制机构所装备的各种军事武器。
第二次世界大战结束后,战后液压技术迅速转向民用工业,液压技术不断应用于各种自动机及自动生产线。
本世纪60年代以后,液压技术随着原子能、空间技术、计算机技术的发展而迅速发展。
因此,液压传动真正的发展也只是近三四十年的事。
当前液压技术正向迅速、高压、大功率、高效、低噪声、经久耐用、高度集成化的方向发展。
同时,新型液压元件和液压系统的计算机辅助设计(CAD)、计算机辅助测试(CAT)、计算机直接控制(CDC)、机电一体化技术、可靠性技术等方面也是当前液压传动及控制技术发展和研究的方向。
我国的液压技术最初应用于机床和锻压设备上,后来又用于拖拉机和工程机械。
现在,我国的液压元件随着从国外引进一些液压元件、生产技术以及进行自行设计,现已形成了系列,并在各种机械设备上得到了广泛的使用。
机械的传动方式一切机械都有其相应的传动机构借助于它达到对动力的传递和控制的目的。
机械传动——通过齿轮、齿条、蜗轮、蜗杆等机件直接把动力传送到执行机构的传递方式。
电气传动——利用电力设备,通过调节电参数来传递或控制动力的传动方式液压传动——利用液体静压力传递动力液体传动液力传动——利用液体静流动动能传递动力流体传动气压传动气体传动气力传动第二节液压传动的工作原理及其组成一、液压传动的工作原理液压传动的工作原理,可以用一个液压千斤顶的工作原理来说明。
图1-1液压千斤顶工作原理图1—杠杆手柄2—小油缸3—小活塞4,7—单向阀5—吸油管6,10—管道8—大活塞9—大油缸11—截止阀12—油箱图1-1是液压千斤顶的工作原理图。
大油缸9和大活塞8组成举升液压缸。
杠杆手柄1、小油缸2、小活塞3、单向阀4和7组成手动液压泵。
抓斗起重机的电气化改造

31 —
P C・ L 变频器 ・ 计算 机——基 于单片机和 电话 网的远程控 制系统 的设 计与实现
关键词 : 抓斗起重机 ; L 变频 器 ; P C; 制动单元 ; 应用效果 中图分 类号 :H 1T 2 5 T 2 ;P 0 文献标识码 : B 文章 编号 :0 4— 4 0 2 1 )4—0 3 — l 10 0 2 (0 1 0 0 1 0
1台 5t 桥式 抓斗起 重机 , 跨度 为 2 . 抓 斗 的 2 5m, 提升 、 开闭 由2台 2 W 绕 线式异 步电动机驱 动 , 2k 小车 行 走机构 分别 由 2台 7 5k 绕线式 异步 电动 机驱动 。 . W
斗 时电机工作 在反馈制 动状态 , 转速 大于 同步转 速 , 停
止时, 由于抓 斗的惯 性 和下 降速 度 太快 导致 停 止效 果
差, 容易 出事 故 。
147 r 一 . T )× l 0 ( B 0 2 m n ,
2 抓斗上升下 降、 闭的变频器控制 开
抓斗 由 2台 电机控 制 , 即抓斗 的开合 电机 , 斗 的 抓 上 升下 降电机 。抓斗抓 物品时 , 开合 电机 运转 , 只有 提 升 时 2台电机 都要 工作 , 互之 间 需要 速度 配 合才 能 相
P C・ L 变频器 ・ 计算机——抓斗起重机 的电气化 改造
机床 电器 2 1. 0 14
抓 斗起 重 机 的 电气 化 改 造
段 树华 ( 湖南 铁 道职业 技 术学 院 ,10 1 420 )
摘要: 桥式抓斗起重机 的电气控制 系统 由于长期工作 , 障率高 , 故 而且速度 调节性能 差 , 动效果也 不理想 , 制 若改 成 P C和变频器控制 , L 调速系统使用 A B的变频调整 器 , 以更好 的调节 速度 , 更好的制动 转矩 , B 可 有 而且降低 了故障 率 , 于维修 。 便
50立方抓斗式挖泥船抓斗液压驱动控制系统分析设计(全套含CAD图纸)

摘要中国江河湖泊众多,海岸线长,航运历来是交通运输的重要方式,因此中国疏浚业对于挖泥船工作性能的要求日益增长,不仅要求生产率高,而且对于特定的工作环境,对于挖泥船也有特殊的性能要求,比方港珠澳大桥所用抓斗式挖泥船,就有自动平挖的功能要求。
为了实现挖泥船疏浚航道、挖泥清污的功能,液压控驱动控制系统那么是必须有的。
本文通过对各种挖泥船的学习和分析,依据抓斗挖泥船施工运行功能和操控要求,设计出了一种50立方抓斗式挖泥船抓斗液压驱动控制系统,该系统能实现抓斗的开闭,以及抓斗各种工位下的起升与下降,以及可靠制动,并具有缓冲措施;能实现回转台左右旋回以及起重臂的变幅运动;具有单独的液压马达与卷筒制动回路。
起升、回转以及变幅回路均采用闭式液压系统,执行元件都选用液压马达。
本设计考虑了抓斗式挖泥船工作过程中的各种工况,根据其工作要求,通过设计计算完成系统的设计选型。
关键词:抓斗式挖泥船;液压驱动控制,闭式液压系统。
ABSTRACTChina, which country has many rivers, lakes and long coastline, that is also the reason why shipping has been the mainly transport mode. Thus, demand of dredger working performance is gradually increased in China dredge section, it includes not only the high productivity, but also requires special performance in given work environment. For instance, the grab dredger, which was used to construct Hong Kong-Zhuhai-Macau Bridge demands automatic surface digging. In order to achieve the function of dredge mud and dredging trash-removal, that hydraulic drive control system is definitely the necessary condition,This paper according to studying and analysis of various dredger, in terms of dredger’s working function and operating requirement, this paper designs one 50 Stere Grab Dredger hydraulic drive control systems in order to operate and lift it, reliability of braking with impact mitigation; turning around of rotary table and variable traverse motion of cargo boom; individual hydraulic motor and brake circuit of coiling block. Lifting, rotation and trolleying loop recommend closed type hydraulic system, actuator uses hydraulic motor.This system design and model selection was finished by had taking all working condition of dredger into consideration, according to the working requirement and calculation.Keywords: Grab dredger; hydraulic drive control system; Closed hydraulic system目录摘要 (I)ABSTRACT (II)1绪论 (1)挖泥船的开展现状及其前景 (1)挖泥船的应用 (1)挖泥船的分类 (2)1.2 本文主要内容和结构 (5)2 液压系统设计 (6)工况分析及功能要求 (6)液压系统的主要设计参数 (6)制定系统原理图 (7)起升机构与回转机构液压原理图设计 (7)变幅机构液压原理图的设计 (8)液压马达与卷动制动回路的设计 (9)油源局部 (10)整体系统原理图 (10)选择的液压系统类型 (12)调压方式的选择 (12)顺序动作的选择 (13)调速方式的选择 (13)执行元件的选择 (13)3液压系统设计计算及元件选型 (14)起升回路的设计计算 (14)回转回路的设计计算 (17)变幅回路的设计计算 (19)补油回路的设计计算 (22)选择联轴器型号 (23)液压控制阀的选型 (24)液压辅件的计算及选型 (29)油箱设计 (33)液压控制装置的设计 (37)3.9 液压泵的安装形式 (37)4系统性能验算 (38)液压系统压力损失验算 (38)系统温升的验算 (40)5集成块设计 (43)块体结构 (43)集成块结构尺寸确实定 (43)抓斗起升回路集成块设计 (43)抓斗开闭及液压马达制动集成块设计 (46)6结束语 (48)总结 (48)展望 (48)心得体会 (48)参考文献 (50)致谢 (51)全套图纸加363963051绪论挖泥船的应用中国江河湖泊众多,海岸线长,水资源南多北少,水土流失严重,航运历来是交通运输的重要方式,同时就人口现状与增长而言,已无法再论地大物博,沿海地带吹填造地及治理、向海洋开展亦势在必行。
抓斗起重机全变频PLC-DP控制电路图
60
1
1
1/1
1
1
信捷电子;装联动台支架
1
1
128K
1
2
+9AJ0
1
+9AM0
1
5A
18
+RXZ410;2 只备用
4
2
4
数量
备注
18 -X93
17 -X93
16 -X93
15 9S03/9E03
14 9MF3
13 4UB
12 4U
11 3U
10 4ZL
9 3ZL
8 4K7.4K8
7 3K7.3K8
名称
TB-2512 TC-608 TC-1003 YBLX19-111/TC40-220V Φ200;~220V CDBR-4030B SJ700-300HFEF2 SJ700-055HFEF2 SKSG-100A/5V SKSG-20A/5V LC1-D12 M7C LC1-D12 M7C RXM2LB2P7+RXZE1M2C RXM2LB2P7+RXZE1M2C C32N/3P+OF C10 C32N/3P+OF C10 NSC100S3080 NSC60E3016
9 PLC
8 PLC
7 PLCLeabharlann 6 PLC5 PLC
4 1K01~4K04
3 UR1~UR4
2 ZL1.ZL2
1 Q01~Q04
序
代号
接线端子排 接线端子排 接线端子排 柜门开关/柜灯 柜吸顶换气扇 触摸屏 隔离变压器 微存储卡 总线连接器 数字量输入单元 中央处理单元 电源单元 小型继电器 电涌保护器 单相滤波器 小型断路器
液压抓斗说明书

使用说明书抓斗型号:YYZD5.0伟明集团公司2009年04月一、设备数据表1、性能参数抓斗容积:5 立方米散货密度:0.5-0.8 吨/立方米抓取重量:3000kg最大抓取重量:5000kg斗瓣数量:6个闭合形式:斗封闭自重:2535kg推荐最小起重机起重量:10t2、外形尺寸闭合高度:3327 mm闭合宽度:2793 mm打开高度:2686 mm打开宽度:4150 mm3、电气数据动机型号:Y180L-4电动机功率:22KW电动机转数:1470转/分电动机电压:380V, (43.2A) 交流4、液压数据液压泵型号:NT4-G50F-4 齿轮泵泵额定压力:31.5MPa额定流量:63升/分钟调定闭合压力:16--18MPa油缸活塞直径:80mm活塞杆直径:45mm油缸最大推力:95 KN闭合时间:12秒开启时间:10秒液压油牌号:68#(夏)46#(冬)抗磨液压油液压油量:170升二、产品介绍1、基本结构本产品的液压抓斗由斗瓣、机架、液压系统、提升油缸等部分组成。
用于抓取物料的六个斗瓣通过销轴与机架装配在一起,连接在斗瓣上提升油缸控制着斗瓣的闭合与打开,以抓取或放落物料,斗瓣采用钢板焊接形成,斗瓣上的销轴与斗尖用耐磨材料制造。
机架是本产品的基础件,由机架本体、上盖、油缸护罩等件组成。
液压系统装于机架的内部中心位置,同电动机、联轴器、液压泵、阀块、管路等组成一体,固定在机架上。
机架的下部空间为液压油箱。
提升油缸的两端分别固定在机架的上部与斗瓣上,随提升油缸活塞杆的伸缩,斗瓣便闭合与打开。
本液压抓斗上盖上可将起重机上的四根钢丝绳穿入四个楔套后,斗便与起重机一起工作。
2、液压系统液压系统由动力元件、控制元件和液压附件等组成。
动力元件由电动机、联轴器、液压泵、及泵架等组成。
控制元件由阀块上的溢流阀、二位四通电磁换向阀组成。
液压附件有回油过滤器、管接头、软管、钢管等组成。
3、工作原理开机空转:接通电源使电动机正转,油泵吸油,溢流阀V1处于关闭状态,油通过阀V2、V3(V2、V3并联)流回油箱,泵处于卸载状态。
抓斗PPT课件

移动和旋转
抓斗的移动和旋转动作是通过控制抓 斗的移动和旋转机构来实现的。移动 机构用于控制抓斗在水平面上的移动 ,旋转机构用于控制抓斗在垂直面上 的旋转。
VS
移动和旋转的驱动方式也有多种,常 见的有轨道驱动和轮胎驱动。轨道驱 动的移动和旋转速度较慢,但稳定性 好,适合在固定场所作业;轮胎驱动 的速度较快,适合在移动场所作业。
机械故障通常表现为抓斗动作 不灵活或卡滞。此时应检查钢 丝绳是否松动或断裂,滑轮和 铰链是否磨损严重或卡滞,如 有需要则进行更换或润滑。
钢丝绳断裂是常见的故障之一 。此时应立即停止使用,更换 新的钢丝绳,并检查是否存在 其他潜在的机械故障。
05
抓斗的安全操作规 程
操作前的准备
检查设备
确保抓斗的机械和电气部分正 常,无损坏或故障。
了解任务
熟悉作业指导书,明确抓斗操 作的目标和要求。
安全培训
所有操作人员必须经过安全培 训,了解操作规程和应急措施 。
环境评估
检查作业环境,确保没有障碍 物,作业区域安全。
操作中的注意事项
遵守操作顺序
严格按照规抓斗的额定负载,避免超载。
保持稳定
在操作过程中,保持抓斗的稳定,避免突然 的移动或动作。
06
抓斗的发展趋势和 未来展望
技术创新
智能化控制
通过引入人工智能和机器 学习技术,实现抓斗的自 主控制和智能决策,提高 作业效率和安全性。
新能源驱动
研发使用新能源(如电力 、氢能等)的抓斗,降低 传统能源消耗和排放,满 足环保要求。
遥控操作
桥式卸船机的抓斗定位与防摆技术综述
(课程大作业)桥式卸船机抓斗摇摆控制技术综述学院:物流工程学院专业:物流技术与装备姓名:林龙(1049721102719)指导老师:胡吉全教授2012年5月摘要:本文主要对国内外桥式卸船机的抓斗摇摆控制相关技术作了一个综合性的介绍,并在查阅国内桥式抓斗卸船机止摆技术相关文献的基础上,介绍了一种国内前沿桥式卸船机抓斗的防摆电子控制方法:为实现对小车的位置和抓斗的摆动分别控制而设计了两个控制回路,其中一个回路采用常规PID算法调节小车位置和速度,另一个回路利用模糊逻辑控制器来消除抓斗的摆动。
关键词:桥式卸船机;抓斗摇摆控制技术;双回路控制技术1引言目前,桥式抓斗卸船机被广泛用于散货码头的生产作业中。
然而桥式抓斗卸船机的小车与抓斗之间采用钢丝绳连接,在卸船机的工作过程中,由于小车的加减速的抓斗的提升动作及风、摩擦等扰动引起抓斗的来回摆动,严重影响了生产作业效率的提高。
因此迫切需要实现卸船机作业的自动控制,提高作业效率。
近年来对卸船机的自动作业系统的研究引起了人们很大的兴趣。
自动控制系统的核心问题,很多学者在此方面作了大量的研究,诸如最优控制、增益调节、自适应控制、状态反馈等,这些经典或现代控制方法都依赖于卸船机系统的数学模型。
控制系统的状态向量的选择及初始状态都对控制性能有很大的影响;此外,利用经典控制方法,由于负载质量的变化使得系统的鲁棒性得不到保证,同时由于小车-抓斗系统的数学模型且能适应不确定性的智能控制等可以被应用到此类控制中。
本文将综合介绍国内外对桥式卸船机的抓斗防摆研究现状、研究难点,并介绍国内部分桥式卸船机的抓斗摇摆控制前沿技术。
2国内外研究现状目前起重机的摇摆控制主要包括机械控制和电子控制两种。
机械摇摆控制主要通过机械手段消耗摇摆能量进而消除摇摆,是一种被动控制方式。
这种方式耗时长、结构复杂、可靠性差,而且减摇效果与司机操作经验有很大关系,限制了起重机工作效率的提高。
电子摇摆控制是一种主动控制方式,它将摇摆控制和小车运行控制结合考虑,不依赖于司机的操作经验,是该领域研究热点。
比例阀液压工作原理图
比例阀液压工作原理图(总1
页)
-CAL-FENGHAI.-(YICAI)-Company One1
-CAL-本页仅作为文档封面,使用请直接删除
负荷传感式比例多路阀液压工作原理图
说明:
液压油从P点进入,沿实线上行。
竖线上的阀是一个减压阀,给后面的换向联提供控制油。
减压阀后面横着的是减压阀的溢流阀,起保护作用。
减压阀下面那个是卸荷阀,这个阀两端受P口压力和负荷传感压力的联合控制,当后面的换向联的阀芯全部处于中位时,负荷传感的压力是零,这个阀就会在P口压力作用下打开,油泵来的液压油直接返回油箱。
这个阀的开口大小是随着负载压力变化的,可以调节返回油箱的流量,反过来,就可以控制负载的动作速度。
卸荷阀的下面是负荷传感压力的溢流阀,也是整个阀组的保护。
最下面的是两位两通的电磁卸荷阀,通电后可以把负荷传感的信号油(虚线)放回油箱,阀组立刻失去压力,可以起到应急保护作用。
就像二楼说的一样。
右面的点划线框内是换向联。
进油口没有细画,应该有一个压力补偿
阀芯上面是两个比例电磁铁,下面是手柄,表示双操作。
阀芯的两侧有两条长竖线,表示阀芯有中间状态,是比例阀。
AB口是工作油口,每个油口都可以反馈回来负载压力(虚线),这个功能就叫负荷传感。
右下部是一个梭阀,把各个换向联的负荷传感信号中的最高压力选择出来,送到进油联,控制卸荷阀动作。
2。
轮式装载机液压原理图说明

轮式装载机液压原理图说明(总1页)
--本页仅作为文档封面,使用时请直接删除即可--
--内页可以根据需求调整合适字体及大小--
一、综述
轮式液压系统由液压泵、单向阀、溢流阀、优先阀、油缸、过滤器等组成二、液压原理图
三、工作情况
1.工作液压系统
工作液压系统主要由举升油缸、翻转油缸、操作阀等组成。
翻转油缸主要控制轮式装载机铲斗的翻转过程。
当通过操作手柄对操作阀进行接通时,液压系统进行工作。
流量通过回路流经操作阀,到达翻转油缸执行翻转操作,然后通过回油路返回油缸。
铲斗的翻转方向由操作阀控制。
举升油缸主要控制铲斗的升降过程。
当通过操作手柄对操作阀进行接通时,液压系统进行工作。
流量通过回路流经操作阀,到达举升油缸执行举升操作,然后通过回油路返回油缸。
铲斗的举升方向由操作阀控制。
2.转向液压系统
转向液压系统主要由优先阀、转向油缸、转向器、油缸组合阀组等组成。
转向系统主要控制轮式装载机车轮的转向问题。
当通过方向盘执行操作时,对转向器施加机械力,转向器接入,流量通过回路进入转向器,再进入液压马达。
一方面,油路通过液压马达和回路到达转向油缸,使装载机进行转向操作。
另一方面,液体压力通过液压马达转换成旋转运动,推动转向器,达到与方向盘施加的作用为平衡状态,此时转向停止。
转动方向和角度由方向盘控制。
2。
抓斗天车电气工作原理
抓斗天车电气工作原理
斗天车是一种电动载货车,通过电气系统来实现其工作。
它采用了一系列的电动设备和电子控制器,使其能够高效地运行和完成各种任务。
斗天车的工作原理主要包括电力供应、电动机驱动、控制系统以及各种传感器和配件的协同工作。
首先,电力供应是斗天车的核心,它提供了电能来驱动电动机和其他电子设备。
一般来说,斗天车采用的是蓄电池作为主要电源。
蓄电池通过充电器充电,在斗天车工作时提供所需的电能。
蓄电池容量越大,斗天车的工作时间就越长。
在电动机驱动的同时,斗天车的控制系统起到了重要的作用。
控制系统通常由电子控制器和传感器组成。
电子控制器负责协调电动机、电池和其他设备之间的工作,保证斗天车的正常运行。
传感器用于监测斗天车的运行状态,如车速、负载、倾斜程度等,以便控制系统做出相应的调整。
斗天车还配备有各种配件,如操纵杆、传动装置、悬挂系统等,它们与电气系统相互协同工作,使斗天车具备更好的操控性能和工作效率。
总之,斗天车的电气工作原理是通过电力供应来提供能量,利用电动机驱动斗天车的运动,同时通过控制系统和传感器的协调工作来保证斗天车的正常运行。
这种电气工作原理使得斗天车能够高效地完成各种工作任务,是现代物流运输中不可或缺的一部分。