导波雷达液位计的调试过程
雷达液位计校准方法
雷达液位计校准方法雷达液位计是一种常用的液位测量仪器,它通过发射和接收雷达信号来测量液体的高度。
然而,由于环境因素和设备本身的误差,雷达液位计的测量结果可能会存在一定的偏差。
因此,定期对雷达液位计进行校准是非常必要的。
雷达液位计的校准方法有多种,下面将介绍其中的几种常用方法。
首先是静态校准方法。
静态校准是指在液体处于静止状态时进行的校准。
根据液体的实际高度和雷达液位计测量到的高度之间的误差,可以通过调整液位计的零点和量程来进行校准。
具体的步骤如下:1. 将液体排空,使液位计处于零位状态。
2. 将液体注入到预定高度,记录雷达液位计测量到的高度。
3. 将液体排空,使液位计回到零位状态。
4. 根据实际高度和测量到的高度之间的误差,调整液位计的零点和量程。
其次是动态校准方法。
动态校准是指在液体处于流动状态时进行的校准。
由于液体的流动会对雷达液位计的测量结果产生影响,因此需要通过动态校准来减小误差。
具体的步骤如下:1. 将液体注入到一定高度,使其处于流动状态。
2. 启动雷达液位计,并记录测量到的高度值。
3. 同时使用其他准确的液位测量仪器,如浮子式液位计或压力式液位计,对液体的高度进行测量,并记录测量结果。
4. 根据两种测量结果之间的误差,调整雷达液位计的参数,如增益和补偿,以提高测量的准确性。
还可以利用标准液位仪进行校准。
标准液位仪是一种精密的液位测量仪器,可以提供非常准确的液位测量结果。
根据标准液位仪所测量到的液位值,与雷达液位计测量到的液位值之间的误差,可以进行校准。
具体的步骤如下:1. 将标准液位仪安装在与雷达液位计相同的位置,并记录标准液位仪测量到的液位值。
2. 同时启动雷达液位计,并记录其测量到的液位值。
3. 根据两种测量结果之间的误差,调整雷达液位计的参数,以提高测量的准确性。
需要注意的是,在进行雷达液位计的校准时,应该选择合适的环境条件来进行校准。
尽量避免有干扰信号的环境,以确保测量的准确性。
雷达液位计校准方法
雷达液位计校准方法雷达液位计是一种常用的工业自动化仪器,用于测量储罐、槽罐等容器中的液位。
为了确保雷达液位计的准确性,需要进行校准。
本文将介绍雷达液位计的校准方法。
一、校准前的准备工作在进行雷达液位计的校准前,需要进行以下准备工作:1. 确保雷达液位计的安装位置正确,并且与被测容器之间没有遮挡物;2. 检查雷达液位计的电源和信号线连接是否正常;3. 根据被测介质的性质选择合适的天线和频率;4. 确保被测容器内的介质处于稳定状态,没有搅拌或液位变动。
二、校准过程1. 雷达液位计的校准一般分为零点校准和距离校准两个步骤。
首先进行零点校准。
零点校准是将雷达液位计安装在一个已知液位高度的容器中,使其测量值与实际液位高度一致。
可以通过手动调节零点设置或者通过软件界面进行调整。
2. 零点校准完成后,进行距离校准。
距离校准是将雷达液位计安装在一个已知液位高度的容器中,通过调整雷达液位计的量程来使其测量范围与实际液位范围一致。
根据液位变化的具体情况,可以通过手动调节量程上限和下限或者通过软件界面进行调整。
3. 在进行校准过程中,可以通过比对雷达液位计的测量值与其他测量仪器(如机械浮子液位计)的测量值,来验证雷达液位计的准确性。
如果存在偏差,可以通过调整校准参数来修正。
4. 校准完成后,需要对校准结果进行记录,包括校准时间、校准人员、校准参数等信息。
同时,建议定期进行校准检验,以确保雷达液位计的准确性和稳定性。
三、注意事项在进行雷达液位计的校准过程中,需要注意以下事项:1. 校准时要确保被测容器内的介质处于静止状态,并且没有气泡、沉淀物等影响测量的因素;2. 校准时要选择合适的工作频率和天线,并确保天线与被测容器之间的距离适当;3. 校准时要避免雷达液位计与其他设备的干扰,如电磁干扰、振动等;4. 校准时要注意安全,避免因操作不当导致事故发生。
雷达液位计的校准是确保其测量准确性的重要环节。
通过正确的校准方法和注意事项,可以提高雷达液位计的测量精度,保证工业生产的安全和稳定。
导波雷达液位计调试步骤两版带举例MR
导波雷达液位计调试步骤两版带举例MR 导波雷达液位计是一种常用的液位测量仪器,可以应用于各种工况和液体介质。
调试导波雷达液位计需要进行准确的标定和参数设置,以确保其测量结果的准确性和稳定性。
下面分别是两版导波雷达液位计的调试步骤,以及一些实际应用中的例子。
第一版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,根据实际要求选择合适的安装方式,如顶装、侧装或杠杆式安装。
确保安装牢固,并且传感器与液位容器无任何物理接触。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
建议使用双绞线或屏蔽电缆以减少电磁干扰。
3.参数设置:根据液体介质特性和工况要求,设置导波雷达液位计的相关参数,包括介质类型、介质密度、容器形状等。
这些参数可以在液位计的用户手册中找到,或者通过厂家的技术支持获取。
4.标定:进行导波雷达液位计的零点和满量程标定,以确保测量结果的准确性。
首先将液位计置于空置状态,调整零点参数,使得显示值与实际液位值一致;然后将液位计置于满量程状态,调整满量程参数,使得显示值与实际液位值一致。
5.验证:使用标准测量工具,如液位计或尺子,进行液位的实际测量,并将测量结果与导波雷达液位计的显示值进行对比。
如果存在偏差,可以调整标定参数或重新进行标定。
导波雷达液位计安装在储罐的顶部,并连接到控制系统。
根据化工液体的特性,设置导波雷达液位计的参数,如介质类型为液态、介质密度为1.2 g/cm³、容器形状为圆柱形。
然后进行零点和满量程标定,确保导波雷达液位计的显示值与实际液位值一致。
最后,使用液位计或尺子进行实际液位的测量,并将测量结果与导波雷达液位计的显示值进行对比。
第二版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,保证传感器的安装位置平稳且无需物理接触。
确保导波雷达液位计与液位容器之间没有障碍物,以免影响测量精度。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
导波雷达液位计调试步骤(两页版)带举例-7MR

Magnetrol导波雷达液位计调试步骤1 键区有三个键用于滚动显示和校准变送器。
上下键()和回车键()。
箭头在显示模式中的功能在组态模式中的功能在组态程序中从一个显示项向前和后移动到另一个显示项增加或减少显示值或移动到另一个选项。
输入组态模式接受一个值并移动到组态程序的下一步。
变送器表头示意图2 组态问题对Eclipse变送器组态需要一些关键的参数。
在开始组态前首先填写下列运行参数显示问题答案Probe Model 型号上所列的探头型号是什么?(探头型号上前面4个数字)705-510A-110/7MR-A118-327Probe Mount 探头安装形式是NPT(螺纹)、BSP(螺纹)还是flange(法兰)的?NPTLevel Units 测量单位(inches(英寸)、centimeters(厘米)、feet(英尺)或meters(米))cmProbe Length 型号上所列的探头长度是多少?327Level Offset 液体在探头的末端时输出的液位读数。
根据实际水位对准(正常安装误差为-12cm)Dielectric 介质的电介质常数是多少?(界面测量中最上层的电介质)10~100Set 4.0 mA 4mA对应的0%的参考点是多少?0cmSet 20.0 mA 20mA对应的100%的参考点是多少?300cm(可根据现场确定,与DCS量程一致)Eclipse 变送器出厂时均设为默认值可在现场重新组态。
下面给出了最小化的组态说明。
1、 变送器供电。
显示器上每隔5秒交替显示四个值:Status (状态)、Level (高度)、%Output(输出%)和Loop current (回路电流)。
2、 移走底部电子隔间的盖。
3、 使用上下键( )从组态程序的一个步骤转到另一个步骤。
4、叹号(!)。
5、 )来增加或减少显示值或滚读选项。
6、7、 10秒后从变送器移走电源。
下面的组态输入是最小化组态:705-510A-110/7MR-A118-327选择所使用探头的型号 7xR-x Model 705:7xA-x ,7xB-x ,7xD-x ,7xE-x ,7xF-F ,7xF-P ,7xF-4,7xF-x ,7xJ-x ,7xK-x ,7xP-x ,7xR-x ,7xS-x ,7xT-x ,7x1-x ,7x2-x ,7x5-x ,7x7-x , 选择探头安装方式(NPT (螺纹),BSP (螺纹),或flange (法 兰)) NPT选择测量液位的单位(inches ,cm ,feet 或meter )。
vega雷达液位计调试分解说明
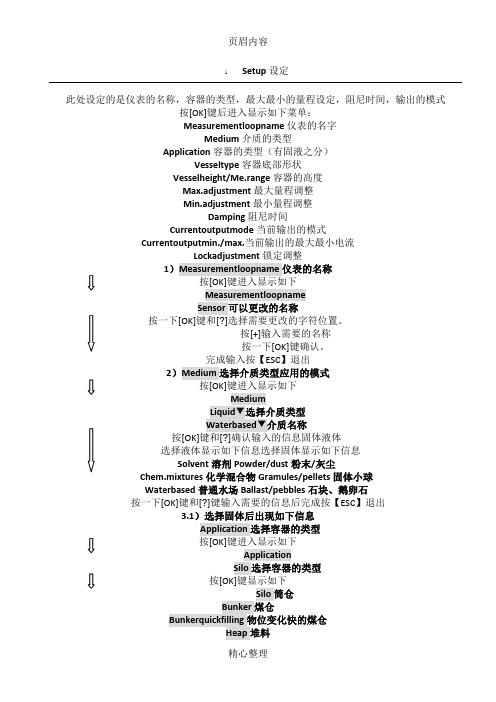
1Setup设定此处设定的是仪表的名称,容器的类型,最大最小的量程设定,阻尼时间,输出的模式按[OK]键后进入显示如下菜单:Measurementloopname仪表的名字Medium介质的类型Application容器的类型(有固液之分)Vesseltype容器底部形状Vesselheight/Me.range容器的高度3.1)选择固体后出现如下信息Application选择容器的类型按[OK]键进入显示如下ApplicationSilo选择容器的类型按[OK]键显示如下Silo筒仓Bunker煤仓Bunkerquickfilling物位变化快的煤仓Heap堆料Crusher压碎器Demonstration演示按[?]键选择以上显示类型按[OK]键完成选择按【ESC】退出3.2)选择液体后出现如下信息Application选择容器的类型6)Max.adjustment最大数值校准按[OK]键进入显示如下Max.adjustment100%可以更改的百分比数0.000m可以更改的上空距离数按一下[OK]键和[?]选择和更改百分比数按[+]输入需要更改的数值Max.adjustment100%可以更改的百分比数按[OK]键确认后出现如下Max.adjustment0.000m可以更改的上空距离数按一下[OK]键和[?]选择和更改上空的距离值确认后显示如下Failuremode22.0mA20.5mA Nochange此项是固定选取的项目<3.6mA按一下[?]键Displayedvalue显示的测量值Backlight背光的选择1)Language设定显示的语言按[OK]键进入显示如下LanguageEnglish▼可以选择显示的语言按一下[OK]键显示如下信息German德语English英语Fran?ais法语Espan?l西班牙语Pycckuu俄语用[?]键选择需要的语言,5)Backlight背光灯按[OK]键进入显示如下BacklightSwitchedoff状态开关关按[OK]键进入显示如下BacklightSwitchon?询问开关是否打开按[OK]键背光灯打开BacklightSwitchoff?询问开关是否关闭按[OK]键背光灯关闭根据需要自己选择需要的模式按【ESC】退出3.Diagnostics诊断此项内容包括的是对仪表状态诊断结果,包括仪表状态,峰值,电子部件温度,测量可靠性,模拟测量,信号曲线和虚假参数曲线。
雷达液位计标定步骤
雷达液位计标定步骤哎呀,写这个雷达液位计标定步骤的作文,听起来就像是在写一个技术手册,但既然要写得轻松幽默,那就得来点不一样的。
首先,咱们得明白,雷达液位计这玩意儿,就是用来测量液体高度的。
想象一下,你站在一个大水缸旁边,想知道里面的水有多深,但是又不想把手弄湿,这时候,雷达液位计就派上用场了。
好了,咱们开始标定吧。
1. 准备阶段:首先得把雷达液位计安装好,这玩意儿就像是你手机的摄像头,得对准目标才行。
所以,你得把它对准那个大水缸。
2. 开机:然后,你得把雷达液位计开机。
这就像是你打开手机,准备拍照一样。
3. 设置参数:接下来,你得设置一些参数,比如测量范围、分辨率什么的。
这就像是你调整手机摄像头的焦距,让照片更清晰。
4. 零点标定:这一步很关键,你得让雷达液位计知道,当水缸是空的,也就是水位为零的时候,它应该显示什么。
这就像是你告诉手机,你现在站在水缸旁边,所以照片的底部就是水缸的底部。
5. 满量程标定:然后,你得把水缸装满水,让雷达液位计知道,当水缸满了,它应该显示什么。
这就像是你告诉手机,水缸满了,所以照片的顶部就是水缸的顶部。
6. 中间点标定:为了确保测量的准确性,你还得在水缸的中间位置做个标定。
这就像是你告诉手机,水缸的中间位置是什么样。
7. 校验:最后,你得检查一下,看看雷达液位计显示的水位是不是准确。
这就像是你检查手机拍的照片,看看水缸的水位是不是和你看到的一样。
好了,标定完成了。
现在,你的雷达液位计就像是有了一双慧眼,能够准确地告诉你水缸里的水位。
这个过程中,你得耐心,就像对待一个新朋友一样,慢慢地,一步步地,让它熟悉你的水缸。
记住,标定雷达液位计,就像是在教一个机器人如何看世界,你得耐心,它才能准确。
所以,下次当你看到雷达液位计在水缸旁边静静地站着,不要觉得它只是个冷冰冰的机器,它可是你了解水缸水位的得力助手呢。
雷达液位计调试步骤及总结

E+H雷达液位计基本原理调试步骤总结:一、原理:雷达液位计是依据时域反射原理(TDR)为基础的雷达液位计,雷达液位计的电磁脉冲以光速沿钢缆或探棒传播,当遇到被测介质表面时,雷达液位计的部分脉冲被反射形成回波并沿相同路径返回到脉冲发射装置,发射装置与被测介质表面的距离同脉冲在其间的传播时间成正比,经计算得出液位高度。
二、调试通电后,会出现D=CT/2 L=E-DC为光速:299792458m/s此时,按E键选择语言为英语(ENGLISH),接着出现按E键选择单位为米,之后会出现,即主画面――百分比显示测量值之后按下E键开始基本参数设置,按E键后出现BASIC SETUP就是基本设置,此时按E键进入设置的第一项罐形状设置(TANK SHAPE)DOME CEILING 为拱顶罐,如现场为拱顶罐就选此项(黑框和对勾即表示选中此项,如要换为别的项,只要按“+”“-”号即可;如此时选中了DOME CEILING ,则按E键确认即可存储并进入下一项,下一项为MEDIUM PROPERTY(介质属性)如为油品之类的,按“+”“-”号换至上图所示位置1.9-4即可,按E确认,再按E进入下一项此项为过程条件,如为平静表面则选CALM SURFACE,如为一般情况比如罐区储油罐就选STANDARD(标准)即可,按E 确认,再按E进入下一项此项为空罐高度设定,既上法兰到最低液位的距离此项为满罐高度设定,既最高液位到最低液位的距离,此数据即为20mA对应值,即最高量程,按设计的最高液位设定即可。
该项即显示出设定完成后的法兰面到液面的高度,即图中的DIST(以米为单位)和测量出的实际液位,即图中的MEAS.V(以百分比显示)。
按E进入下一项此项无需设定,直接按E即退回主菜单,退回后同时按下“+”“-”号即退回到测量值显示处,此时设定完成。
雷达液位计做回波抑制:目的:为了消除测量范围内的固定物的干扰,优化参数。
若是空罐则可做满量程抑制,若有液位则通过观察包络线做抑制高于干扰点或高于真实液位≤0.5m处。
德国vega雷达液位计旧调试分解中文说明 -3 调试60仪表

PACT ware TM应用-7使用 PACT ware TM VEGA DTM调试FLEX60 PULS60 SON60(仅供参考)一、VEGA-DTM的窗口格对所有的VEGA仪表的 DTM由一条菜单条和三个区域组成:2131、导航区域显示被连的接仪表和打开的 DTM 的一些数据和状态。
在导航中对于参数部分,依靠被连接的仪器一个树状参数被显示。
通过选择进入树状参数,想要的参数将会在参数区域中显示出来。
可以对参数进行修改。
(在左下角有测量值的显示)。
导航区域菜单栏的前面如果有 + 号,标志该菜单栏还有下一级菜单用鼠标左键点击 + 号,使之变为–号,就会展开相关的下一级菜单2、参数区域在这里,可以显示所有仪器的数据并且能对传感器的参数调整做必要的修改。
在左下角有测量值的显示。
通过选择参数部分的功能块按钮或选择导航部分的树状菜单栏调整参数页面。
.几个功能块按钮:阻尼时间、最大最小调整、线性化、电流输出、显示等3、信息区域信息区域由经过挑选的几个文件卡片部分组成。
确定传感器连接的显示部分二、参数调整(修改过的参数用保存到传感器上)1、“Basic adjustment”基本调整在Sensor tag栏,可以为传感器做一个标记,如:“1#原煤仓”。
在Units of measurement测量单位栏,保留默认值 m 。
Min./Max. adjustment (量程调整)" Basic adjustment – Min-Max Adjustment" (设置物位百分比的距离)VEGAPULS、VEGASON、VEGAFLEX 传感器是距离测量仪表,它们测量的是(传感器)到产品之间的距离而并不是直接的物位。
为了显示这个物位,测量距离对应物位百分比的分配必须进行。
借助这一调整,物位被计算出来。
同样传感器的工作范围是从最大限制到所需的范围。
这些设置的始点是"Sensor reference plane"(传感器基准面),例如FLEX62传感器安装螺纹的根部。
导波雷达液位计调试步骤两版带举例MR
导波雷达液位计调试步骤两版带举例MR第一步:准备工作:1.确认液位计型号和技术参数,了解液位计的测量范围和精度要求。
2.确认液位计的安装位置和环境条件,确保安装位置无遮挡物,并满足液位计的工作环境要求。
第二步:安装导波雷达液位计:1.根据液位计的安装要求,将液位计正确安装在待测介质容器上,并进行固定。
2.连接液位计的电源和信号线路,确保连接正确且接触良好。
3.进行液位计的线路对地导通测试,确保液位计的线路接地良好。
第三步:液位计参数设置:1.根据液位计的使用手册,进入液位计的参数设置界面。
2.配置液体介质的参数,如介质密度、介质温度等。
3.配置液位测量的范围和单位,确保液位计的测量结果准确。
第四步:液位计的初始校准:1.液位计安装完成后,需要进行初始校准。
首先关闭液位计的发射功能,保持液位计处于接收状态。
2.使用等高度容器或者其他准确的参考测量方法,输入正确的液位值,并在液位计的参数设置界面进行校准。
第五步:液位计的监测功能调试:1.打开液位计的发射功能,开始进行液位测量。
2.根据液位计的显示结果和实际测量值,对液位计的测量范围进行调整,确保液位计的测量结果准确。
第六步:液位计的报警功能调试:1.根据液位计的报警功能要求,配置液位计的报警参数,如上限报警、下限报警等。
2.进行液位计的报警测试,观察液位计的报警功能是否正常。
第七步:液位计的稳定性测试:1.将液位计安装在液位测量容器上,并进行长时间的稳定性测试,观察液位计的测量结果是否稳定。
2.在稳定性测试过程中,根据需要调整液位计的滤波参数,以提高测量结果的稳定性。
第八步:记录调试结果:1.在液位计调试的过程中,记录每一步的调试结果,包括液位计的参数设置、校准值、测量结果等。
2.如果在调试过程中遇到问题或异常情况,要及时记录,并进行相关的故障排除。
液位计调试的过程需要仔细按照步骤进行,确保液位计能够正常工作并提供准确的液位测量结果。
在调试过程中要注意安全,避免误操作和人员伤害。
德国vega雷达液位计旧调试分解中文说明--3-调试60仪表

使用PACT ware TM VEGA DTM调试FLEX60 PULS60 SON60(仅供参考)一、VEGA-DTM的窗口格对所有的VEGA仪表的 DTM由一条菜单条和三个区域组成:1、导航区域显示被连的接仪表和打开的 DTM 的一些数据和状态。
在导航中对于参数部分,依靠被连接的仪器一个树状参数被显示。
通过选择进入树状参数,想要的参数将会在参数区域中显示出来。
可以对参数进行修改。
(在左下角有测量值的显示)。
导航区域菜单栏的前面如果有 +号,标志该菜单栏还有下一级菜单123 PACT ware TM应用-7用鼠标左键点击 + 号,使之变为–号,就会展开相关的下一级菜单2、参数区域在这里,可以显示所有仪器的数据并且能对传感器的参数调整做必要的修改。
在左下角有测量值的显示。
通过选择参数部分的功能块按钮或选择导航部分的树状菜单栏调整参数页面。
.几个功能块按钮:阻尼时间、最大最小调整、线性化、电流输出、显示等3、信息区域信息区域由经过挑选的几个文件卡片部分组成。
确定传感器连接的显示部分二、参数调整(修改过的参数用保存到传感器上)1、“Basic adjustment”基本调整在Sensor tag栏,可以为传感器做一个标记,如:“1#原煤仓”。
在Units of measurement测量单位栏,保留默认值 m 。
1.1 Min./Max. adjustment (量程调整)" Basic adjustment – Min-Max Adjustment" (设置物位百分比的距离)VEGAPULS、VEGASON、VEGAFLEX 传感器是距离测量仪表,它们测量的是(传感器)到产品之间的距离而并不是直接的物位。
为了显示这个物位,测量距离对应物位百分比的分配必须进行。
借助这一调整,物位被计算出来。
同样传感器的工作范围是从最大限制到所需的范围。
这些设置的始点是"Sensor reference plane"(传感器基准面),例如FLEX62传感器安装螺纹的根部。
液位计调试说明书

液位料位计调试说明书杨帆整理目录雷达液位计 (3)超声波液位计 (4)雷达料位计 (5)射频导纳液位计 (6)雷达液位计型号:LR 250操作步骤(1)语言(2)介质(选择液体liquid)(3)反应速度(快中慢) Quick Start (4)单位(选择米)(快速开始设置)(5)操作模式(液位level)(6)低标定点(空罐液位)(7)高标定点(一般选择0)(8)确认说明:1、低标定点得设置方法就是先任意设置低标,测空罐得液位,修改低标便可,例如:低标设置1米,确认后显示-2米,实际液位为3米。
再次修改低标为3米,完成量程设置。
2、默认语言为英语,介质为液体liquid,反应速度为快、单位为米、操作模式为液位level。
3、每次修改参数后到最后一步选择Yes 确认。
超声波液位计超声波液位计设置为代码,具体如下:P01操作模式:1液位(level) 2空间(space) 3 距离(distance)P02界面属性:1水平(standard)2斜面(slope?)P03反应速度:1快(fast)2中(middle)3慢(slow)P04探头类型P05单位:m、cm 、mm、英尺(feed)、英寸(inch)P06安装位置到池底得距离P07量程说明:1、注意设置量程,例如安装位置到池底为3米,池高2、8米,则P06为3米,P07为2、8米。
不可与雷达液位计混淆。
2、默认参数:操作模式:液位(level);界面属性:水平(standard);反应速度:快(fast);单位:m ;3、探头类型为出厂默认,不用修改。
雷达料位计设置步骤:开始设置(start)→快速开始设置(quick start)1、仓得结构类型:钢仓(steel)、水泥仓(concrete);2、反应速度:快(fast)、中(middle)、慢(slow);3、单位(uint):m、cm、mm ;4、测量模式:距离(distance)、物位(level)、空间(space);5、低标定点:仓底到安装位置距离6、高标定点:默认为0;7、确认;注意事项:1、低标定点得设置方法就是先任意设置低标,测空仓得物位,修改低标便可,例如:低标设置10米,确认后显示2米,实际液位为8米。
FMU液位计调试方法
FMU30简明调试方法1.接线方式屏蔽电缆接入仪表后,24V电压接在仪表的+,—上面,屏蔽层接到仪表里面的接地端子。
另外,为保持仪表测量的稳定性,仪表外部的接地端子尽量也做一下接地。
2.调试方法一般来说,超声波液位计的调试需要修改如下几个选项,002(罐体形状),003(介质属性),004(过程条件),005(空罐标定),006(满罐标定)上电以后,仪表自检,然后变到测量值00,⑴按E键进入基本设置菜单,首先看到的是002这个选项,显示的是(拱顶罐,水平卧罐,旁通管,,等几个选项),如需更改,按+或者—号键选需要选择的罐型,按E键确定。
更改后+,-号键一起按返回上层菜单。
⑵如不需更改,直接按E键进入下个菜单003。
003代表被测量介质的属性,有如下几个选项(未知,液体,固体直径大于4mm,固体直径小于4mm,, 等),根据现场情况进行选择。
修改方法同上。
⑶继续按E键进入004菜单,有如下几个选项(标准,平静液面,带搅拌器,,等)一般工况选择标准。
根据实际情况选择。
⑷继续按E键进入005菜单,这个是需要修改的很重要的一个值。
这个值是空罐值。
把池底到超声波探头表面的实际距离输入仪表,按+键进入菜单,选中空罐的值,按E键确认修改,+,—用来修改数值,E键确认。
⑸ +,—号一起按返回005的主目录,继续按E键进入006菜单,这个也是需要修改的值,这个值是满罐值,它表示池底到最高液位的距离,修改方法同空罐值。
基本上,仪表的调试已经完成。
另,如果显示值波动较大,这个在罐子里面的测量可能出现,这个需要做一下回波抑制。
在基本设定中,按E键找到051这个菜单,进入后选择(manual,手动),+,—号—起按返回051菜单,继续按E键进入052菜单,输入抑制的距离,这个距离比空罐值要低一点,如果空罐5M的话,建议输入4.8M。
+—一起按返回052菜单,继续按E键进入053菜单,选择抑制打开,等超声波自己开始进行回波抑制后,仪表会自动跳回抑制关闭状态,表示回波抑制完成。
雷达液位计调试步骤及总结

资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载雷达液位计调试步骤及总结地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容E+H雷达液位计基本原理调试步骤总结:一、原理:雷达液位计是依据时域反射原理(TDR)为基础的雷达液位计,雷达液位计的电磁脉冲以光速沿钢缆或探棒传播,当遇到被测介质表面时,雷达液位计的部分脉冲被反射形成回波并沿相同路径返回到脉冲发射装置,发射装置与被测介质表面的距离同脉冲在其间的传播时间成正比,经计算得出液位高度。
D=CT/2 L=E-DC为光速:299792458m/s二、调试通电后,会出现此时,按E键选择语言为英语(ENGLISH),接着出现按E键选择单位为米,之后会出现,即主画面――百分比显示测量值之后按下E键开始基本参数设置,按E键后出现BASIC SETUP就是基本设置,此时按E键进入设置的第一项罐形状设置(TANK SHAPE)DOME CEILING 为拱顶罐,如现场为拱顶罐就选此项(黑框和对勾即表示选中此项,如要换为别的项,只要按“+”“-”号即可;如此时选中了DOME CEILING ,则按E键确认即可存储并进入下一项,下一项为MEDIUM PROPERTY(介质属性)如为油品之类的,按“+”“-”号换至上图所示位置1.9-4即可,按E 确认,再按E进入下一项此项为过程条件,如为平静表面则选CALM SURFACE,如为一般情况比如罐区储油罐就选STANDARD(标准)即可,按E 确认,再按E进入下一项此项为空罐高度设定,既上法兰到最低液位的距离此项为满罐高度设定,既最高液位到最低液位的距离,此数据即为20mA对应值,即最高量程,按设计的最高液位设定即可。
该项即显示出设定完成后的法兰面到液面的高度,即图中的DIST(以米为单位)和测量出的实际液位,即图中的MEAS.V(以百分比显示)。
雷达液位计校准方法
雷达液位计校准方法雷达液位计是一种常见的液位测量仪器,广泛应用于石化、化工、电力、环保等工业领域。
为了确保雷达液位计的测量准确性,需要进行校准。
本文将介绍雷达液位计的校准方法。
一、校准前的准备工作在进行雷达液位计校准之前,需要进行一些准备工作。
首先,确保液位计的供电正常,并检查传感器的连接是否良好。
其次,确定校准范围和校准点,根据实际需求选择校准点。
最后,准备校准所需的标准液位计。
二、校准方法1. 校准前的零点校准零点校准是为了确保雷达液位计在无液位变化的情况下输出为零。
将校准液位计安装在容器内,并保持液位不变,记录下此时的输出值。
如果输出值不为零,需要根据仪器的说明书进行调整,使其输出为零。
2. 校准曲线的绘制在进行校准前,需要绘制校准曲线。
校准曲线可以将雷达液位计的输出值与标准液位计的值进行对比,从而得到一个准确的关系曲线。
根据实际需求,选择合适的校准点,将标准液位计的值与雷达液位计的输出值一一对应,然后绘制出校准曲线。
3. 校准斜率的调整校准斜率的调整是为了保证雷达液位计的输出值与实际液位的变化一致。
将校准液位计安装在容器内,并调整液位,记录下此时的输出值。
然后根据标准液位计的值与输出值的对应关系,调整雷达液位计的斜率,使其输出值与实际液位变化一致。
4. 校准点的验证校准点的验证是为了确认校准的准确性。
选择几个校准点,将标准液位计的值与雷达液位计的输出值进行对比,如果差异较小,则说明校准结果准确可靠。
5. 校准结果的记录和报告校准完成后,需要将校准结果进行记录和报告。
记录校准的时间、校准点的选择、校准斜率的调整等信息,以备后续参考和查阅。
三、校准注意事项1. 校准时需保持环境稳定,避免干扰因素对校准结果的影响。
2. 校准过程中需严格按照仪器的说明书进行操作,避免操作失误。
3. 校准过程中需注意安全,避免发生意外事故。
4. 校准结果需经过验证,确保准确性和可靠性。
总结雷达液位计的校准是确保其测量准确性的重要步骤。
e+h导波雷达液位计说明书

e+h导波雷达液位计说明书摘要:1.e+h 导波雷达液位计概述2.e+h 导波雷达液位计的工作原理3.e+h 导波雷达液位计的特点4.e+h 导波雷达液位计的应用领域5.e+h 导波雷达液位计的安装与维护正文:一、e+h 导波雷达液位计概述e+h 导波雷达液位计是一种采用导波雷达技术来测量液体或固体物位的仪表。
它通过发射能量波(一般为脉冲信号),并接收反射的能量波来测量物位高度。
e+h 导波雷达液位计具有高精度、高可靠性、易于安装和维护等特点,广泛应用于各种工业领域。
二、e+h 导波雷达液位计的工作原理e+h 导波雷达液位计的工作原理如下:1.发射装置发射能量波,能量波在波导管中传输。
2.能量波遇到障碍物(如液体表面)后反射,反射的能量波由波导管传输至接收装置。
3.接收装置接收反射信号,并根据测量能量波运动过程的时间差来确定物位变化情况。
三、e+h 导波雷达液位计的特点1.高精度:e+h 导波雷达液位计具有较高的测量精度,能够满足各种工业场合的要求。
2.高可靠性:采用先进的导波雷达技术,具有出色的抗干扰能力和较长的使用寿命。
3.较强的适应性:适用于各种液体、固体物位的测量,可广泛应用于不同场合。
4.易于安装和维护:e+h 导波雷达液位计结构简单,安装方便,且维护成本较低。
四、e+h 导波雷达液位计的应用领域e+h 导波雷达液位计广泛应用于以下领域:1.工业生产过程:如高贮仓、高煤仓或堆场等测量场合。
2.石油、化工、冶金等行业:用于测量各种液体、固体物位。
3.环保领域:如水位监测、污水处理等。
五、e+h 导波雷达液位计的安装与维护1.安装:选择合适的安装位置,保证能量波能顺利传输到接收装置,并避免安装在有较强干扰的环境中。
2.维护:定期检查导波雷达液位计的运行状况,发现问题及时处理。
VEGAPULS雷达液位计VVO调试
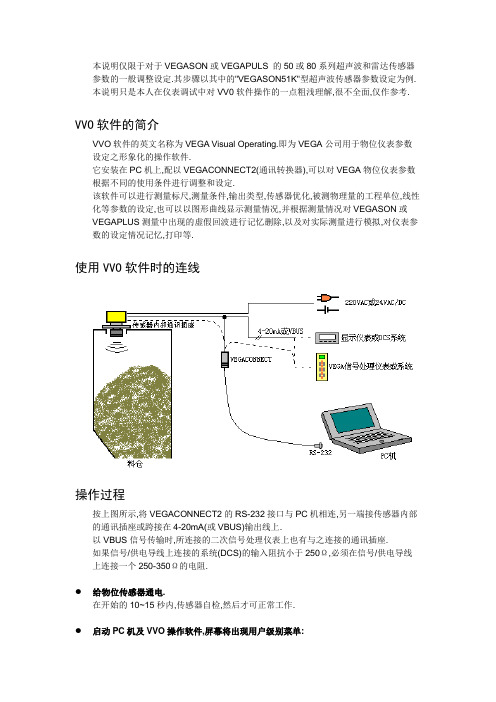
本说明仅限于对于VEGASON或VEGAPULS 的50或80系列超声波和雷达传感器参数的一般调整设定.其步骤以其中的"VEGASON51K"型超声波传感器参数设定为例.本说明只是本人在仪表调试中对VV0软件操作的一点粗浅理解,很不全面,仅作参考.VVO软件的简介VVO软件的英文名称为VEGA Visual Operating.即为VEGA公司用于物位仪表参数设定之形象化的操作软件.它安装在PC机上,配以VEGACONNECT2(通讯转换器),可以对VEGA物位仪表参数根据不同的使用条件进行调整和设定.该软件可以进行测量标尺,测量条件,输出类型,传感器优化,被测物理量的工程单位,线性化等参数的设定,也可以以图形曲线显示测量情况,并根据测量情况对VEGASON或VEGAPLUS测量中出现的虚假回波进行记忆删除,以及对实际测量进行模拟,对仪表参数的设定情况记忆,打印等.使用VVO软件时的连线操作过程按上图所示,将VEGACONNECT2的RS-232接口与PC机相连,另一端接传感器内部的通讯插座或跨接在4-20mA(或VBUS)输出线上.以VBUS信号传输时,所连接的二次信号处理仪表上也有与之连接的通讯插座.如果信号/供电导线上连接的系统(DCS)的输入阻抗小于250Ω,必须在信号/供电导线上连接一个250-350Ω的电阻.●给物位传感器通电.在开始的10~15秒内,传感器自检,然后才可正常工作.●启动PC机及VVO操作软件,屏幕将出现用户级别菜单:此菜单出现三个选项:1.Operator--操作级.2.Maintenance--维修级3.Planning--设计级选择操作级时,用鼠标选定"Operator",按OK即可直接进入下一个菜单,在这个菜单中可选择Display(显示),Service(服务),Quit(退出)和Help(帮助)等项.图1选择维修级时, 用鼠标选定"Maintenance",按OK键, 此菜单上计算机会向您询问密码.如图2所示.请在"Name"(名字)后输入"VEGA",然后按OK键即可进入下一个菜单,在这个菜单中可以选择Display(显示),Diagnostics(诊断),Instrument data(仪表参数), Service(服务),Quit(退出)和Help(帮助)等项.选择设计级时, 用鼠标选定" Planning",按OK键在此菜单上计算机会向您询问密码.如图2所示.请在"Name"(名字)后输入"VEGA",在"Password"(密码)后输入"VEGA",然后按OK键即可进入下一个菜单,在下一个菜单中可选择Display(显示),Diagnostics(诊断), Instrument data(仪表参数),Configuration(组态), Service(服务),Quit(退出),和Help(帮助)等项.从上述可见,选择不同的级,在下一个菜单中可选的项数不同,VVO对传感器可以设定的内容就不同.所以在设定仪表参数时,要根据需要选择相应的级.为了说明较为全面,下面的操作以设计级为例.图2上述密码可以在"User access"(用户通道)中改动. 输入密码及按下OK键后,屏幕将出现:图3注意:图3菜单要等待PC机(VVO软件)与传感器确实实现通讯(需几秒钟时间)后才能完全出现.如果PC机与传感器没有取得通讯,图3菜单上将出现相应的提示,并且菜单中的PC机,VEGACONNECT2,传感器之间的连线将断开.此时请对系统进行如下的检查:1.检查传感器是否供电?2. VEGACONNECT2连接在信号线时,传感器所带的负载是否为250-350Ω?对于其他的故障,请与供货厂商联系.图3菜单的上部从左至右标有您可选的设定调整项目.下面分别加以说明:●Display(显示)用鼠标器选定Display,将出现下面的菜单:此菜单为测量值的显示.第1个框图为测量值的光柱指示.其上左窗口以数字指示测量值,上右窗口中可以用鼠标器根据需要选择:--Distance m(d) 上空距离(米)--Distance ft(d) 上空距离(英尺)--% 百分数--Scaled 标尺--Sensor-Display 传感器显示--V% 容量百分数图4 第2个框图为当前的电流输出值. 包括光柱和数字显示.图4菜单的最下方有一个传感器工作状态指示(如正常指示OK) ,如出现故障,请按"Diagnostice"(诊断) 键,菜单将出现相应的提示.按"Quit"键可退出此菜单.●Simulation(模拟)用鼠标器选择"Diagnostice"(诊断)栏中的"Simulation"(模拟),将出现下面的菜单:此菜单为输出的模拟.在此菜单的三个框图中,下面两个与上述(显示)的内容相同.在第1个框图中,用鼠标器按"Start"键,再按动左面标尺图上的"<"键或">"键,即可以模拟输出.进行模拟输出时,下面两个框图中的数字和光柱指示将出现相应的变化.如果传感器连接了具有报警的二次仪表,通过这个操作可以在无实际物位变化时校验二次仪表的报警指示和输出.图5 按"Quit"键可退出此菜单.Parameter adjustment (参数调节)用鼠标器选择" Instrument data(仪表参数)"中的"Parameter adjustment"(参数调节),将 出现下面的菜单:此菜单为仪表参数的调节.在此菜单里,可以进行一些重要的传感器参数的设定和调节.--Meas. Loop Data(测量回路数据).--Adjustment(调节).--Conditioning(分析处理)--Outputs(输出).--Sensor Optimisation(传感器最优化)图6Meas. Loop Data( 测量回路数据 ) Parameter adjustment / Meas. Loop Data选择右图下方的" Meas. Loop Data"键,将出现如下的菜单:此菜单显示如下信息:--传感器用途.--传感器输入.--传感器型号.--测量范围.--传感器系列号.--软件版本.图7 --传感器当前的温度.按"Quit"键,可回到图6菜单.Adjustment(调节) Parameter adjustment / Adjustment选择" Adjustment"(调节),将出现图8菜单:在图8菜单中选择"Min/Max-Adjustment"(最小/最大调节),将出现图9菜单:图8 图9该参数用来设定所测料位的变化 (实际测量) 范围 .在有些应用场合,实际的测量范围往往小于容器的高度.在图9菜单中,对于最小/最大调节有两种类型的选择:--Y es:带料调节.--No:不带料调节.可以选择带料或不带料调节.为调整方便,一般采用不带料调节.如选择带料调节,在进行最小调节时需放空容器,在进行最大调节时需注满容器.如选择" No"(既不带料位调节),按"OK"键确认,将出现下面的菜单.在左上角的窗口中选择所需要的工程单位m(d)或ft(d).然后在其余的窗口输入最小和最大值及对应的%.注意:与最小/最大值相对应的%不一定是0%和100%,这需要根据需要去选择.设置量程的基点:对于法兰安装的传感器为法兰下平面.对于螺纹连接的传感器为根部.最小/最大调节的范围值不能太小,否则会造成很大的测量误差,一般最小不低于50mm.图10按"OK"键确认,将回到图8菜单,按"Quit"键,可回到图6菜单.至此Adjustment(调节)过程结束.Conditioning(分析处理) Parameter adjustment / Conditioning选择"Conditioning(分析处理)",将出现图11菜单:在此菜单中可有三个选择:--Scaling ( 赋值).--Linearizsation ( 线性化).--Lntegration time ( 积分时间).图11选择Scaling ( 赋值),将出现图12菜单: Parameter adjustment / Conditioning/ Scaling此参数用于设定VEGA显示仪表(如DIS10)的显示类型,及单位.在此菜单的上面两个窗口.可以输入量程的0%和100%所对应的工程单位的数值.在下面的Parameter窗口,可以根据需要选择:--Dimensionless ( 无单位,仅要数字)--V olume ( 容积)--Mass ( 质量)--Height ( 被测介质高度)图12 --Distance ( 上空距离)在Meas.unit窗口,可以根据需要选择:--m ( d ) 米--dm ( d ) 分米--cm ( d ) 毫米--ft ( d ) 英尺--yd ( d ) 码%--in ( d ) 英寸%按OK键确认,自动返回到图11菜单.选择Linearisation ( 线性化),将出现图菜单:Parameter adjustment / Conditioning / Linearisation在Selection of the linearistion curve( 线性化曲线的选择)窗口将有四项选择:--linear( 线性)--horizontal cylindrical tank ( 圆柱形卧罐)--spherical tank ( 球罐)--user programmable curve ( 用户编程曲线)图13 下面的窗口仅在选择了user programmable curve ( 用户编程曲线时才起作用.一般在测量容器的容量时使用设置该菜单( 有些场合容器的容量与料位的高度不是线性关系):VVO软件内部可提供预先做好的线性,圆柱形卧罐和球罐等三种线性化曲线,选定这三种曲线之一时, 仅需按OK键,传感器即可根据所选择的项的特性满足用户的测量要求.并且此时将返回图11菜单.当对特殊形状的容器或具有特殊加注曲线的容器进行测量时,请选择user programmable curve ( 用户编程曲线).此时," Edit "(编辑)键被激活.请按Edit键.将出现图14菜单:在此菜单中,用户可根据VVO所进一步提供的线性,圆柱形卧罐或球罐及其它较常见容器的形状,通过简单地输入其外形尺寸等数据,对线性化进行自动计算.遇到特殊形状容器测量时,也可以在此菜单通过逐点实测,自己编制线性化曲线.当预通过输入外形尺寸选择计算线性化曲线时,按Calculate键,此时将出现图15菜单:图14 在此菜单的左上部可选择圆柱形立罐, 圆柱形卧罐,球罐和漏斗形罐等四种类型.随着罐类型的选定,左面的A,B和C图中的图形将做响应的变化,在A图中可以选择罐顶形状,在C图中可以选择罐底形状,在B图中可以设定罐中间部分的高度和直径,在A图上部的Wallthickness窗口可以输入罐壁的厚度,在C图的下部可以输入0%和100%所代表的高度,在Unit窗口可以选择所需要的工程单位.上述内容选定后,按Calculate键,进行曲线的计算,然后将出图15现图16菜单.菜单左侧为根据上述选择自动运算的罐高与容量的对应表.右侧为相应的线性化曲线图.上部为容量值.如确认,请按OK键.( 否则请按右上角的"×"键退出该菜单)将回到图14菜单,再按OK键将回到图13菜单,此时用这种方法设置线性化曲线的工作就完成了.当遇到特殊形状容器的容量测量时,就必须在图14菜单中进图16 行如下的操作:将当前的高度测量值( 在左侧的绿色图框内)通过"《"键传入"%"窗口内,在"V%"窗口输入此时对应的容量值,按下面的"Transfer"键,可将此点的一对数值列入下面的表内.这样,逐点( 最多可提供32个点)地测出相应的一对数值也可完成线性化曲线的设定.若确认,请按OK键.( 否则请按右上角的"×"键退出该菜单) 将回到图14菜单,再按OK键将回到图13 菜单.若想删除所做的曲线,按"Delete"键.若想把另外的传感器的线性化曲线移到目前调试的传感器,请按右上角的"Transfer"键(略).在图13菜单中按"Cancel"键,退到图11菜单.选择Lntegration time ( 积分时间) Parameter adjustment / Conditioning / Lntegration time随之将出现图17菜单:该参数在传感器对测量信号采集时起阻尼作用.在此菜单中可以选择积分时间.积分时间的设定范围:0~999秒.按"OK"键存储并退到图11菜单,按"Quit"退到图6菜单至此,Conditioning(分析处理)过程结束.图17Outputs(输出) Parameter adjustment / Outputs选择" Outputs(输出) ",将出现图18菜单:此菜单有两个选择:--Current output (电流输出)--Display of measured value (测量值的显示)如果选择Current output (电流输出),将出现图19菜单.在这个菜单中可以设定电流输出信号.图18 在该菜单的"Failure mode"( 故障)栏,可以设定:--No change (在仪表出现故障时,电流输出不变)--22mA (在仪表出现故障时,电流输出为22mA)--20.5mA (在仪表出现故障时,电流输出为20.5mA)在该菜单的"Current volume(电流值)窗口可以设定输出电流为:--4~20mA--20~4mA按"Save"( 存储)键确认.再按"Quit"键,将回到图18菜单.图19如果选择Display of measured value (测量值的显示),将出现图20菜单.在此菜单下,可以根据需要重新调节传感器显示.在"Parameter"(参数)栏,可以选择所显示的内容:--Distance ( 上空距离)--Percent ( 百分数)--V olume percentage ( 容量百分数)--Scaled ( 标尺)在"Unit"栏内的工程单位将随"Parameter"(参数)栏内容的变化而随之做相应变化.按"Quit"键,退出该菜单,再按"Quit"键,将回到图6菜单.至此,Outputs(输出)的设置过程结束.图20Sensor Optimisation(传感器最优化) Parameter adjustment / Sensor Optimisation选择Sensor Optimisation(传感器最优化),将出现图21菜单:此菜单的上部具有如下信息:--Distance( 上空距离)--Meas value ( 测量值% )--Sensor type ( 传感器型号)--Serial No ( 系列号)--Sensor TAG ( 传感器位号)--V ersion ( 软件版本)图21 Sensor TAG的Edit用于写入传感器的位号.在此菜单下,用户可以选择:-- Meas environment" ( 测量环境)--Echo curve ( 回波曲线)--False echo storage ( 虚假回波的记忆)--Reset ( 复位)选择"Meas environment" ( 测量环境)Parameter adjustment / Sensor Optimisation/ Meas environment此时将出现图22菜单:在此菜单下可有如下选择:--Operating range ( 操作范围)--Measuring conditions ( 测量条件)--Sonic velocity ( 声波速率)图22如选择Operating range ( 操作范围),将出现图23菜单.此参数一般用来限定传感器的测量范围.如不限定,可激活左上角的not limited ,该参数为传感器的最大量程.在此菜单中,可以重新设定最小/最大操作范围,如果不需设定,VVO软件将默认图10菜单下设定的最小/最大调节范围.在此菜单下设定的操作范围一般比调节范围大5%,也可以等于图10菜单下设定的最小/最大调节范围.参数设定后请按OK键确认.图23如选择Measuring conditions ( 测量条件),将出现图24菜单.请在此菜单的Measuring conditions ( 测量条件)栏内根据被测介质选择:--Solids ( 固体)--Liquids ( 液体)在"Option" ( 选择)栏内根据测量需要选择:--Fast change of level (大于1m/min).(料位的快速变化)--High dust level ( 强烈粉尘)图24 --Large angle of repose ( 大的堆角)--Gas layers ( 鼓/排风)--Additional echo due to reflection from side of vessel( first large echo is provided as distance)( 使附加波适当的从容器侧壁反射)(第一个最大的回波以距离为条件) 设定参数后按OK键存储.VVO自动回到图22菜单. Measuring conditions ( 测量条件)参数设置完成.如选择Sonic velocity ( 声波速率),将出现图25菜单.此菜单可以Input of sonic velocity(设置声波速率的输入).该传感器在出厂时已根据通常情况预制了331.6m/s的声波速率,请注意不要随意更改.此菜单也可以Calculate sonic velocity by input of themeasured distance (通过输入被测距离计算声波速率),如图26.图25参数选择好后,按OK键确认,VVO回到图22菜单.再按Quit键,可回到图21菜单.此时, Meas environment ( 测量环境)的设置结束.图26选择Echo curve ( 回波曲线) Parameter adjustment / Sensor Optimisation/ Echo curve此时将出现图27菜单.图27是一个实际测量得到的回波曲线.该图的纵坐标为回波的振幅,以dB( 分贝)表示.其横坐标为测量距离,以m ( 米)表示.从图中可以看到,在被测量程范围内,有两个回波,一个位于0.3m左右,另一个位于2.8m左右,如果打开该图上方的数字显示窗口,可以看到一个回波的Distance( 距离)为0.34,Amplitude(振幅)为80dB,Effective echoprob( 回波出现的概率)为100%.另一个回波的图27 Distance(距离)为2.81,Amplitude(振幅)为51dB,Effective echo prob( 回波出现的概率)为65.9%.这条曲线是经VVO计算圆整的,目的是删除大量的高频波,给观察和处理带来方便.实际的测量回波可以通过按"Raw values"( 原始回波)键在图28看到.需要恢复到回波曲线时,按Echo curve ( 回波曲线)键.在图27菜单下可以利用"Zoom"键使回波曲线放大.图28 可以按Update栏内的Start键启动对回波曲线的扫描更新.也可以利用Print键对该图形菜单进行打印.在回波曲线菜单中可见,传感器认为Distance( 距离), Amplitude(振幅), Effective echo prob( 回波出现的概率)等值较大的回波为测量到的料位值,如果较大的波实际是由于障碍或其他原因造成的虚假回波时,就会造成错误测量(假如回波曲线中的0.34m的波为虚假回波,2.81m的回波是真实的有效回波).我们可以采用虚假回波记忆的方法删除虚假回波,详见下述.选择False echo storage ( 虚假回波的记忆)Parameter adjustment / Senser Optimisation/ False echo storage此时将出现图29菜单.该菜单的上图为回波曲线,下图为虚假回波记忆曲线.对于VEGASON50系列的传感器,只有在激活Showecho curve( 出现回波曲线)功能时,才会出现与虚假回波记忆曲线对应的回波曲线,否则,仅出现虚假回波记忆曲线.为了解决上面提到的问题,可以按Learn false echos(识别虚假回波)键,接下来将出现图30菜单.图29A从回波曲线上我们认为,2.7m以前的回波为虚假回波,所以,在窗口输入2.7,这样传感器的电子部件就可以将2.7m以前的回波存储到其内部的数据库,并将它作为无效回波处理.按Update( 跟随)或Create new( 生成新的回波曲线)键,几秒钟后将出现图29B.图30 从图29B可以看到,图29A曲线中黑色尖头所指的0.34m的测量回波被作为无效回波处理掉了,现在黑色尖头指向了我们认为正确的测量回波(2.81m)处.该菜单的其它功能键与"回波曲线"所说的类似,不再做说明了.退出菜单的方法与前述相同.至此, False echo storage ( 虚假回波的记忆)的设置就图29B完成了.选择Reset ( 复位) Parameter adjustment / Sensor Optimisation/ Reset此时将出现图31菜单:在此菜单下,可以对所设定的参数进行复位.该复位为基本复位,按OK键,可以把当前除虚假回波记忆以外的所有数据复位成工厂预制参数.至此,Parameter adjustment (参数调节)的所有参数设定完成.图31 退至图3菜单.Configuration(组态)用鼠标选定Configuration,将出现图32画面该画面出现了三个选项:--Measuring system (测量系统)--Measurement loop (测量回路)--Program (编程)选择Measuring system (测量系统),将出现图33菜单.图32在此菜单下,可以设定测量单位(米或英尺)还可设定菜单语言:--Deulsch (德语)--English (英语)--France (法语)--Italiano (意大利语)--Nederlands (荷兰语)此菜单下的Reset功能可以将包括虚假回波记忆在内的图33 所有参数复位成工厂预制参数.选择Measurement loop (测量回路)(Modify),将出现图34菜单.在此菜单下:--可设定测量回路号.--可设定回路的描述.--用途:Level measurement( 料位测量)Level (open channel) ( 料位"明渠" )Distance measurement (距离测量)参数设定后按OK键确认.该设定结束.图34●补充说明1在使用50系列雷达传感器时,如按第9页的步骤选择"Sonic velocity "(回波速率),将出现图35菜单.测量过程使用导波管时,波的传输受导波管壁的阻碍,可能出现测量误差.在该菜单下可以采用三种方法来修正这个测量误差.●Correction factor ( 修正系数为工厂设定)●Calculation of the correction factor by input of themeasured distance (通过输入测量距离来计算修正系数).●Calculation of the correction factor by input of the图35 tube diameter (通过输入导波管直径来计算修正系数).选择"Correction factor ( 修正系数为工厂设定)",将出现图35菜单.在窗口中输入相应的百分数,按OK键,即完成测量值的修正.选择" Calculation of the correction factor by input of the measured dis tance (通过输入测量距离来计算修正系数)",图35菜单将变为图36.在窗口中输入你认为正确的测量距离,按"start calculation"键起动计算功能,再按OK键确认,即完成测量值的修正.选择" Calculation of the correction factor by input of the tube diameter (通过输入导波管直径来计算修正系数)" 图35菜单将变为图37.在窗口中输入你使用的导波管直径,按"start calculation"键起动计算功能,再按OK键确认,即完成测量值的修正.图36 图37●补充说明2使用80系列超声波传感器时,由"Parameter adjustment / Sensor Optimisation"路径进入传感器最优化菜单时,将比使用50系列超声波传感器时多出现一个"Mounting arrangement"选项,如图38所示: 选择"Mounting arrangement",将出现图39菜单:图38 图39在此菜单中,我们可以选择:--Fitting position irrelevant (与传感器的安装无关)--Socket(安装延长接管)超声波传感器在测量时,与被测介质之间存在一个盲区,如果被测介质上升过高,必须采用延长接管,此时为了满足测量要求,应设定接管至仓顶的距离.--Below ceiling(仓顶下安装)如果传感器安装在料仓顶下,由仓顶造成的反射回波可能会对传感器的测量造成不良影响,为了满足测量要求,应设定传感器至仓顶的距离.●补充说明3使用80系列雷达传感器时,由"Parameter adjustment / Sensor Optimisation"路径进入传感器最优化菜单时,将比使用50系列超声波传感器时多出现一个"Mounting arrangement"选项,如图38所示: 选择"Mounting arrangement",将出现图40~46.在这些图中,你可以根据不同的传感器安装方式选择相应的画面,传感器将按你的选择自动地进行有关参数的运算处理,以得到一个良好的测量品质.图40--Fitting position irrelevant (与传感器安装无关)图41--Socket (传感器安装在法兰座上)图42--Window (传感器安装在视窗口上)图43--Tank top (罐顶安装)图44--Below ceiling (罐顶下安装)图45--Inside pipe (导波管外安装)图46--Window in pipe (导波管内安装)图40以上是对于超声波传感器的参数设定的简要说明,VVO软件在组态,服务,帮助等菜单中还有一些密码,参数显示,打印等功能,基本上与传感器参数的设定关系不大.在这里就从略了.该类传感器还有一些更深层的参数设置,因上述介绍的参数调整设定已足可以解决通常的料位测量问题,在这里就不做介绍了,当遇到特殊的用上述方法难以解决的问题时,请与您的供货商联系.。
雷达液位计调试说明书
雷达液位计调试说明书
雷达液位计是一种先进的液位测量装置,可以应用于各种液体储
罐和容器的液位测量,具有测量精度高、安装方便、使用寿命长等优点。
但是,如果雷达液位计的调试不正确,就会影响其测量精度和使
用寿命,因此正确的调试非常重要。
一、调试前的准备工作
在调试雷达液位计前,需要进行准备工作,包括准备调试工具、
了解液体的性质和物理特性、确认测量范围等。
在准备工具方面,应准备好电池或电源、螺丝刀、梯度板等工具。
同时,需要了解液体的物理特性和性质,例如液体的介电常数、密度、温度等参数,以便在调试过程中参考。
二、调试流程
1. 安装雷达液位计
将雷达液位计安装到液体储罐上,并根据要求连接好电源和信号线。
2. 调试操作
(1) 调节液位计的传感器,使其垂直于液体表面。
(2) 通过梯度板落差法,进行量程校准。
(3) 启动液位计进行基础参数校准,设置参数,满足特定的液位
测量要求。
(4) 对不同的液体进行灵敏度调试,适时调节雷达液位计的参数。
三、调试注意事项
在进行雷达液位计的调试过程中,需要注意以下几个方面:
(1) 调试时应避免液位计与其他金属物体产生干扰,以确保准确
测量。
(2) 在量程校准时应注意选择合适的梯度板。
(3) 灵敏度调节时应根据具体测量场景进行调整,以提高测量精度。
(4) 调试结束后需要进行全面检测和验证,以确保雷达液位计的
测量精度和可靠性。
总之,正确的调试是保证雷达液位计准确测量的前提,需要注意
各种细节和安全事项,提高调试的效率和质量。
超声波液位计调试步骤
超声波液位计调试步骤
超声波液位计调试步骤:
①安装位置首先需根据被测容器形状大小选择合适安装位置确保探头垂直向下且远离进料口搅拌器等干扰源;
②固定方式用抱箍卡箍焊接等方式将传感器主体固定在罐顶或侧壁预留法兰盘上保证其稳定不晃动;
③接线检查参照说明书将电源信号线正确接入控制器或PLC相应端口中并用万用表测量确认无短路断路现象;
④上电自检给设备通电后观察面板上状态指示灯是否正常亮起液晶屏有无显示错误代码提示;
⑤菜单设置通过按键旋钮进入设置界面根据实际需求调整量程单位盲区等基本参数直至符合工况要求;
⑥空罐标定将容器内液体完全排空后在菜单中选择零点校准选项等待几秒钟直至显示为空罐高度值;
⑦满罐标定缓慢往容器内注水直至达到最高测量上限后再次进入菜单选择满度校准记录当前读数;
⑧模拟测试用桶装水等方法模拟不同液位变化观察显示值与实际值是否一致偏差应在允许范围内;
⑨调整灵敏度若发现信号跳动频繁或响应迟缓需返回设置页面适当增大衰减系数提高抗干扰能力;
⑩校准周期为保证测量精度需定期用标准尺激光测距仪等工具重新校准零点满度防止长期漂移;
⑪数据备份将此次调试结果包括版本号参数设置故障信息等详细记录在案并存入U盘以防丢失;
⑫定期复查尽管前期调试到位但随着时间推移环境变化等因素影响还需每季度复查一次各项指标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导波雷达液位计的调试过程
1、选择仪表单位“m”,应工艺要求,在显示屏显示值项选择液位计显示屏显示单位为“%”。
2、选择探头总长度,探头总长度既可以手动输入,也可以让传感器系统自动测量,如聚丙烯回收精制区污水池深度为6m,污水池顶部混凝土厚度为0.2m,保温箱高度为0.8m,则需将探头总长度截成7m。
3、确定探头类型,选择缆式4mm重锤型。
4、选择介质类型和介质特性,由于是测量污水池液位,所以选择介电常数>10的含水介质。
5、选择液位最大设定值,即污水池液位为100%时探头从基准面(过程接头的密封面)沿钢缆到液面的距离。
6、选择液位最小设定值,即污水池液位为0%是探头从基准面(过程接头的密封面)沿钢缆到底端重锤的距离。
7、输入阻尼时间,为保证仪表趋势图能平滑有序,将阻尼时间调整为2s。
8、线性化调整,由于污水池是立方体结构,污水池容量与高度成线性关系,因而选择线性“Linear”。
9、对电流输出方式进行选择,选择4mA~20mA。
10、参数设定完成后,对回路进行调试,取4mA、8mA、12mA、16mA、20mA 5个点分别进行上行程和下行程调试。
11、确认检查仪表指示无问题,并与DCS画面显示一致后,投用仪表,清理现场。