机械式精密锁紧机构设计与分析
连杆锁紧机构的设计方法

连杆锁紧机构的设计方法连杆锁紧机构是一种常见的机械设计元素,广泛应用于各种机械设备中。
它的设计方法直接影响到机构的性能和可靠性。
本文将介绍连杆锁紧机构的设计方法,包括机构的选择、参数的确定和设计原则等方面。
在设计连杆锁紧机构之前,需要明确机构的应用场景和要求。
根据实际需求,选择合适的机构类型和结构形式。
常见的连杆锁紧机构有摩擦式锁紧、齿轮式锁紧和液压式锁紧等。
不同的机构类型具有不同的特点和适用范围,需要根据具体情况进行选择。
确定机构的设计参数是设计的关键步骤之一。
首先,需要确定锁紧力的大小。
锁紧力应能够满足工作负荷的要求,并考虑到工作条件的变化。
其次,需要确定连杆的长度和材料。
连杆的长度应根据机构的布置和工作空间来确定,材料的选择应考虑到强度、刚度和耐磨性等因素。
此外,还需要确定其他参数,如摩擦系数、齿轮的模数和齿数等。
在设计连杆锁紧机构时,需要遵循一些设计原则。
首先是合理布置机构的各个部件,使其紧凑、稳定,并便于加工和维修。
其次是保证机构的刚度和强度。
连杆锁紧机构在工作时会受到较大的载荷,因此需要保证各个部件的刚度和强度,以防止变形和破坏。
此外,还需要考虑机构的平衡性和稳定性,以确保机构在工作过程中不会产生过大的振动和冲击。
设计连杆锁紧机构时,还需要注意一些细节问题。
例如,在选择摩擦式锁紧机构时,应根据工作条件选择合适的摩擦材料,并进行摩擦系数的测定和修正。
在选择齿轮式锁紧机构时,应根据工作负荷和速度选择合适的齿轮材料和齿轮参数,并进行齿轮传动的计算和设计。
在选择液压式锁紧机构时,应根据工作压力和流量选择合适的液压元件,并进行液压系统的设计和优化。
连杆锁紧机构的设计方法是一个复杂而重要的工作。
正确的设计方法能够确保机构的性能和可靠性,提高机械设备的工作效率和安全性。
在设计过程中,需要根据实际需求选择合适的机构类型和结构形式,确定机构的设计参数,并遵循一些设计原则和注意一些细节问题。
通过科学合理的设计方法,可以设计出性能优良的连杆锁紧机构。
8种锁紧与释放机械设计原理,开拓你的机械设计灵感

8种锁紧与释放机械设计原理,开拓你的机械设计灵感加我进交流群工具教程资料在机械设计和产品设计中,我们会经常碰到需要设计锁扣结构,有时还要求设计的锁扣能够解锁,这就涉及到了机械原理的运用。
今天分享8种巧妙的锁扣设计原理,这8种锁扣都是可以解锁的,不是死锁扣。
凸轮锁紧销结构如上图所示,是一种凸轮结合锁紧销形成的一种锁扣结构。
其设计原理包含一个凸轮特征、一个锁紧销、一个弹簧、一个手柄。
需要注意的是锁紧销的端部要做成圆弧状,这样方便实现锁扣的锁紧位置移动。
对称锁扣结构对称锁扣结构的锁紧杆和扳紧杆是一样的,形状和结构一样,其分别布局在机架两边,通过弹簧连接,需要注意的是锁紧杆和扳紧杆配合的位置需要做成圆弧,方便滑动。
这种结构有一个特点是扳紧杆既可以做锁紧杆也可以做扳紧杆,锁紧杆既可以做扳紧杆也可以做锁紧杆。
阶梯对称锁扣结构阶梯对称锁扣结构是在第二种结构基础上演变而来的,即将锁紧杆和扳紧杆的配合圆弧面做成阶梯状,没有了配合面的圆弧结构。
这种机构也是有机架固定,其阶梯配合面可以实现有几个不同的锁紧位置可选择。
L型锁紧结构L型锁紧机构的锁紧杆是L型的,其由机架、扳紧杆、锁紧杆、挡块、锁紧弹簧等组成。
锁紧的实现是通过弹簧力将锁紧杆和扳紧杆扣合。
锁紧的位置可以通过设置不同的缺口而实现不同的锁紧位置。
上图的锁紧缺口是设置在扳紧杆的一端。
锁栓+扳紧杆结构锁栓扳紧杆结构的特点是由锁栓代替了原来的锁紧杆,即锁紧杆缩短了很多,直接组装在扳紧杆上。
此种机构有机架、扳紧弹簧、扭簧、扳紧杆、锁栓等组成。
扳开锁栓时,扳紧杆可以靠自重下降工作。
此种机构的特点是锁栓固定在扳紧杆上。
旋转锁紧结构旋转锁紧结构的扳紧件的运动是一个圆周运动,没有了锁紧杆,机架上开有导槽,扳紧杆上装有扳紧销,扳紧销在机架上的导槽内运动,其运动形式是先轴向推动,再径向转动,结合弹簧的弹力实现扳紧销紧紧的卡在机架上的导槽内。
滑块锁紧结构滑块锁紧结构中,扳紧杆演变成了一个滑块,通过滑块在导轨上滑动来实现锁紧与松开的动作。
一种新型压力机行程调节机构锁紧装置设计及有限元校核分析
meh d wi h sg ft e sr cur ft o r s o di h c , r e s n b e i ie he sr t r l t o t t e de in o h tu t e o he c re p n ng c e k mo e r a o a l s gv n t tucu a h
第3 6卷第 3期
21 0 0年 6月
农 业 装 备 技 术
Ag iul a rc t lEqui ur pme t& Te h o o y n c n lg
Vo_ 6 N . 13 o3
Jn 00 u .2 1
一
种 压 机 程 节 锁 装 设 及 限 校 析 新型 力 行 调 机构 紧 置 计 有 元 核分
He Y nh n , u n i m n, h n Wej 2X eg,h n u L Z e g i g a z og一 H a g J n i C e ni , u P n I o gJ n,i h n q n a a Z a
( .rcs n Ma hn o l R s ac n t ue o a gu Ya g L o ;. olg f Meh nc l 1P e ii c ie T o e e rh Isi t fJ n s n iGrp2C l e o c a ia o t e E gn eig n ie rn ,Ya g h u Unv ri ) n z o ie s y t
0 弓 言 J
压力 机行 程有 固定 式 和可调 式 两种 。行 程 固定 式 压力 机行 程是 不 可调 的 ,压力 机 的加 工工 艺受 到 限制 , 满足 不 了一些 用户 的要 求 , 因此设计 有 行程 可 调式 压力机 ,在本 次设 计 中 的行 程 可调节 装 置是 一 种 有 别 于 目前使 用 的行程 可 调 装 置 的 新 型结 构 , 此 结 构 中涉及 到 一个 重要 的部 件 ,就是 行程 调 节机 构
机械设计之锁紧与防松
机构设计——锁紧与防松此处所讲的锁紧与防松仅适于可拆结构。
对不不可拆结构,一般从配合上或用不可拆联接达到要求。
锁紧机构主要工作原理相关是力学上的死点、压力角和摩擦角。
其实际机构非常多,常用的有螺纹锁紧、偏心轮锁紧、斜面锁紧、四杆机构锁紧。
螺纹锁紧是最常用的,其产品已经标准化。
在一般情况下推荐使用。
使用螺纹锁紧时应注意配合的螺纹长度。
一般说来,超过八个牙后多余的配合长度意义不大,少于三个牙则联接不可靠。
螺纹锁紧的一个最大优点是行程长,全行程均可作为有效作用点,且各处增力均匀。
其缺陷是当工作行程要求较长时,操作起来较麻烦。
一般情况下均可采用,但在要求快换的情况下不宜单独使用。
偏心轮锁紧机构能快速锁紧,但其锁紧作用点较为固定且行程很小,对零件精度有一定的要求。
对于塑胶件来说,因其容易产生蠕变而影响锁紧效果。
对于锁紧点常作小范围变动的情况,可能偏心轮与螺纹锁紧配合使用。
斜面锁紧增力较小,行程较小,但行程有一定的调节能力,一般以斜锲的方式使用。
在实际设计中,常利用塑胶的弹性在较小的锁紧力情况下使用。
另外,也常用于调节零件间的间隙。
一般不用于较大锁紧力的情况。
四杆机构锁紧行程可设计得很大,锁紧点较为固定。
对于精度较高的机构可单独使用。
除行程可以设计得较大外其它情况与偏心轮相似。
一般与螺纹锁紧配合使用。
其结构较为复杂,应用于经常使用的快换机构。
除以上常用的锁紧机构外,还有一类机构没有锁紧作用,但能在作用点附近自锁。
这类机构常与锁紧机构配合,扩展锁紧机构的功能。
这类机构除棘轮外没有固定的方式,一般是临时设计。
压力角是机构中不考虑构件的惯性力和不计运动副的摩擦力的情况下,机构运动时从动件所受到的驱动力的作用线与该力作用点处运动的绝对速度方向线之间所夹的锐角。
压力角越大,驱动越困难。
当压力角的余角小于接触面间的摩擦角时,机构就能自锁。
在设计自锁机构时,对摩擦角的取值应是机构工作所有可能环境的最小值。
除此之外,此类机构还要求能在一定情况下能方便的解锁。
机构设计_锁紧与防松

机构设计_锁紧与防松机构设计是机械设计中非常重要的一部分,它关系到机械系统的工作效率和安全性。
在机械设计中,锁紧与防松是一项关键的技术,它可以确保机构在工作过程中不会发生松动或者错位,保证机械系统的稳定性和可靠性。
锁紧与防松技术的应用范围非常广泛,比如汽车、航空、工程机械、电子设备等领域的机械系统都需要采用锁紧与防松技术。
锁紧与防松技术主要有两种方式,一种是利用摩擦力使部件固定在一起,另一种是利用机械结构实现固定。
下面将对这两种方式进行详细介绍。
一、摩擦力锁紧技术摩擦力锁紧技术是通过增大连接部件之间的摩擦力来实现锁紧的。
在这种技术中,常用的一种方式是使用锁紧螺母。
锁紧螺母是一种特殊的螺帽,它的内部有一段螺纹,可以与螺杆或者螺栓的外螺纹相结合。
当螺母旋紧时,螺纹处于紧密配合状态,从而产生了一种摩擦力,使得连接部件无法被外力松动或错位。
另外一种摩擦力锁紧技术是使用弹簧垫片。
弹簧垫片是一种特殊形状的垫圈,它具有一定的弹性,可以通过增加连接部件之间的压力,增加摩擦力,从而实现锁紧。
在使用弹簧垫片时,需要根据连接部件的材料、尺寸和工作环境等因素来选择适当的类型和规格的弹簧垫片。
二、机械结构锁紧技术机械结构锁紧技术是通过设计合适的机械结构来实现锁紧的。
这种技术的优点是不受外界环境和工作条件的影响,具有较高的可靠性。
常用的机械结构锁紧技术包括齿轮驱动、锁紧螺钉、卡簧和弹性销等。
齿轮驱动是一种常用的机械结构锁紧技术,它通过多个齿轮的咬合来实现连接部件的锁紧。
在齿轮驱动中,需要根据连接部件的工作要求和传动比例来选择合适的齿轮副。
锁紧螺钉是一种特殊形状的螺钉,它的头部设计有锁紧机构,可以通过旋转螺钉头部来固定连接部件。
卡簧和弹性销则是利用弹性变形来实现锁紧的,它们具有良好的弹性和回弹性能,可以有效地保持连接部件的位置和姿态。
锁紧与防松技术在机械设计中的应用非常广泛,能够有效地提高机械系统的工作效率和安全性。
在具体的机械设计中,需要根据机械系统的特点和要求选择合适的锁紧与防松技术,并结合实际情况进行详细的设计和计算。
锁紧装置设计方案

锁紧装置设计方案锁紧装置设计方案一、设计目标随着机械设备和工程机械的不断进步和广泛应用,锁紧装置成为保证设备安全和稳定运行的重要组成部分。
本设计方案旨在设计一种高效可靠的锁紧装置,确保设备在工作中不松动或脱落,提高设备的安全性和可靠性。
二、设计原理锁紧装置的设计原理是通过利用摩擦力或其他机械原理,将两个部件或多个部件连接在一起,并使其在工作中不松动或脱落。
根据实际应用需求和工作环境,选用相应的设计原理进行锁紧装置的设计。
三、设计方案1. 弹簧式锁紧装置弹簧式锁紧装置通过利用弹簧的弹力将两个部件连接在一起,并通过锁销或锁死螺母等装置固定,确保在工作过程中不会松动或脱落。
此方案适用于工作环境相对较稳定的设备。
2. 摩擦式锁紧装置摩擦式锁紧装置通过利用两个部件之间的摩擦力将其连接在一起,并通过调节摩擦力的大小来实现锁紧效果。
此方案适用于工作环境相对较恶劣的设备,可以根据实际需求选用不同的摩擦材料和结构设计。
3. 螺纹式锁紧装置螺纹式锁紧装置通过利用螺纹连接将两个部件紧密固定在一起,并利用阻碍螺纹松动的装置来实现锁紧效果。
此方案适用于锁定较大力矩的设备,可增加松动螺纹的抗拧矩能力。
4. 精密机械锁紧装置精密机械锁紧装置通过利用精密机械结构的设计来实现锁紧效果。
此方案适用于对精度要求较高的设备,可通过精密滑动副、定位销和套筒等设计来实现锁紧效果。
四、设计步骤1. 确定锁紧装置的工作原理和锁紧方式,根据实际需求选择相应的设计方案。
2. 根据设备的工作条件和负荷要求,确定锁紧装置的材料和尺寸。
3. 进行装置的结构设计和分析,包括连接方式、紧固件的选用以及装置的可靠性和安全性分析。
4. 进行装置的制造和装配,确保各个零部件的加工精度和装配质量。
5. 进行装置的试验和测试,验证装置的锁紧效果和可靠性。
6. 根据试验和测试结果,进行装置的优化和改进,以提高装置的性能和可靠性。
五、总结锁紧装置设计方案的选择和设计步骤的确定是确保装置锁紧效果和可靠性的关键。
简单的机械锁紧结构
简单的机械锁紧结构
简单的机械锁紧结构主要包括以下几种:
1.螺纹锁紧:螺纹锁紧是最常用的锁紧方法,其产品已经标准化。
使用螺纹锁紧时,应注意配合的螺纹长度。
一般情况下,超过八个牙后多余的配合长度意义不大,少于三个牙则联接不可靠。
螺纹锁紧的优点是行程长,全行程均可作为有效作用点,且各处增力均匀。
缺点是当工作行程要求较长时,操作起来较麻烦。
2.偏心轮锁紧:偏心轮锁紧机构能快速锁紧,但其锁紧作用点较为固定且行程很小,对零件精度有一定的要求。
对于塑胶件来说,因其容易产生蠕变而影响锁紧效果。
偏心轮锁紧常与螺纹锁紧配合使用。
3.斜面锁紧:斜面锁紧增力较小,行程较小,但行程有一定的调节能力。
一般以斜锲的方式使用,常用于调节零件间的间隙。
不过,一般不用于较大锁紧力的情况。
4.四杆机构锁紧:四杆机构锁紧行程可设计得很大,锁紧点较为固定。
对于精度较高的机构可单独使用。
一般与螺纹锁紧配合使用,其结构较为复杂,应用于经常使用的快换机构。
这些简单的机械锁紧结构在各种场合中有广泛的应用,根据实际需求和条件选择合适的锁紧结构可以确保机械部件的稳定性和安全性。
机械锁紧装置凸轮机构及优化设计分析

机械锁紧装置凸轮机构及优化设计分析凸轮机构的设计需要考虑以下几个方面:力的传递、摩擦等。
在设计
凸轮机构时,需要合理选择凸轮的形状和凸轮轴的位置,以满足锁紧和释
放的要求,并尽量减小摩擦损失。
在机械锁紧装置凸轮机构的优化设计方面,以下几个方面值得考虑:首先,凸轮的形状设计。
凸轮的形状对机械锁紧装置的性能有重要影响。
合理选择凸轮的形状可以增强锁紧装置的力传递和锁定稳定性。
比如,采用圆形凸轮时,摩擦面积较小,有利于降低摩擦损失。
而采用椭圆形凸
轮时,能够实现较大的锁定力。
其次,凸轮轴的位置设计。
凸轮轴的位置会影响凸轮与锁紧杆之间的
配合,进而影响锁定力的大小。
合理选择凸轮轴的位置可以增加凸轮与锁
紧杆之间的摩擦力,提高锁定力。
再次,材料选择。
在机械锁紧装置凸轮机构的设计中,需要选择适合
的材料,以保证其强度和耐磨性。
常用的材料有钢、铸铁等。
合理选择材
料可以延长机械锁紧装置的使用寿命。
最后,尺寸设计。
机械锁紧装置凸轮机构的尺寸对其工作性能和结构
紧凑度有影响。
在设计时需要考虑凸轮的直径和长度等尺寸参数,以满足
锁定和释放的功能需求,并尽量减小装置的体积。
综上所述,机械锁紧装置凸轮机构是一种可靠的锁紧机构。
在设计和
优化设计时,需要考虑凸轮的形状、凸轮轴的位置、材料选择和尺寸设计
等方面的因素。
通过合理的设计和优化,可以提高机械锁紧装置的工作性
能和使用寿命。
机械锁紧装置凸轮机构及优化设计分析-优化设计论文-设计论文
机械锁紧装置凸轮机构及优化设计分析-优化设计论文-设计论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:机械锁紧装置中凸轮机构结构紧凑、运动可靠、设计简单,只要设计出合适的凸轮轮廓,就能依靠凸轮机构各组成部分的相互配合得到设计需要的运动规律。
机械凸轮机构运动可靠的特点使其在纺织机、印刷机、内燃机、数控机床等机械中普遍应用。
决定其运动可靠性的主要条件是凸轮轮廓的设计。
凸轮轮廓的设计难度高,需要经过大量的计算和推敲。
凸轮轮廓的优化是提高凸轮机构运动可靠性和减少磨损程度的关键。
本文总共分为四部分。
第一部分简单介绍了凸轮机构;第二部分分析了凸轮机构的运动过程;第三部探讨了影响凸轮机构可靠性的设计因素;第四部分分析了凸轮机构的优化设计。
旨在为凸轮机构动作系统的优化设计提供一些参考。
关键词:机械锁紧装置;凸轮机构;设计;凸轮轮廓凸轮机构是机械设备重要的锁紧装置,常用于定位锁紧设备中。
如纺织机、印刷机、电动车刹车装置、数码产品外置记忆卡的卡槽装置等。
它由凸轮、从动件、机架等构件构成,其中决定凸轮机构性能的主要构件为凸轮。
凸轮的性能主要由其曲线轮廓所决定,而凸轮的轮廓曲线运动、直线运动是凸轮设计的重点,也是凸轮机构设计的重要内容。
由于凸轮机构为机械控制装置的重要组件,它在机械规律的运动过程中承担着传动动能和完成预定的运动规律的作用。
在机械运动过程中,凸轮机构做往复的曲线摆动或直线运动,在这个过程中凸轮轮廓会受到较强的压力、刚性冲击力和摩擦力,因此易发生磨损,从而影响工作性能。
结合弹性流体动压润滑原理、图解法、解析法对凸轮轮廓做精确计算,对凸轮轮廓进行优化设计,是改善凸轮机构运动规律下综合性能的重要途径,也是当前凸轮机构的主要研究方向。
1凸轮机构概述凸轮机构的主要构建包括杆状从动件、盘状或柱状曲线轮廓、三个机架构件组成。
常用于数控机床的进刀机构、汽车发动机的配气机构等。
按照主要构件凸轮的形状分为盘形凸轮机构、移动凸轮机构、圆柱凸轮机构。
锁紧装置设计方案

锁紧装置设计方案引言锁紧装置是一种用于防止某个物体或部件在特定条件下发生移动或松动的装置。
在机械设计中,锁紧装置被广泛应用于各种设备和机械系统中,以确保其安全可靠运行。
本文将介绍锁紧装置的设计方案,包括设计原理、材料选择和制造工艺等方面的内容。
设计原理锁紧装置的设计原理主要是利用摩擦力和力的平衡来实现。
通过施加一定的力或压力,使摩擦力大于或等于移动或松动力,从而实现物体或部件的锁定。
常见的锁紧装置包括螺纹锁紧装置、夹紧装置和键连接等。
螺纹锁紧装置螺纹锁紧装置是一种利用螺纹原理实现锁紧的装置。
它主要通过旋转一个螺纹件,使螺纹与工件或部件的螺纹咬合,从而产生摩擦力来锁定物体或部件。
在设计螺纹锁紧装置时,需要确定螺纹的参数和材料的选择,以确保锁紧装置的可靠性和耐久性。
夹紧装置夹紧装置是一种通过压力来实现锁紧的装置。
它通过施加一定的压力,使夹紧装置的夹紧片或夹具夹紧住工件或部件,从而实现锁定。
在设计夹紧装置时,需要考虑夹紧片或夹具的材料和形状,以及施加压力的方式和程度。
键连接键连接是一种常用的锁紧装置,它通过键与轴或孔的配合来实现锁定。
键连接的设计要考虑键的形状和尺寸,以及键与轴或孔的配合间隙,确保键连接的紧固性和可靠性。
材料选择锁紧装置的材料选择是保证装置可靠性和耐久性的重要因素。
常用的材料包括金属材料和非金属材料。
金属材料金属材料通常具有较高的强度和刚度,适合在要求较高的工作环境中使用。
常用的金属材料包括钢、铸铁、铜和铝等。
在选择金属材料时,需要考虑其强度、硬度、耐腐蚀性和磨损性等因素。
非金属材料非金属材料通常具有较低的密度和良好的耐腐蚀性能,适用于要求较轻、耐腐蚀的场合。
常用的非金属材料包括塑料、橡胶、玻璃和陶瓷等。
在选择非金属材料时,需要考虑其耐腐蚀性、抗磨损性和温度适应性等因素。
制造工艺锁紧装置的制造工艺包括材料加工、成形和装配等过程。
不同类型的锁紧装置有不同的制造工艺。
螺纹锁紧装置螺纹锁紧装置的制造工艺包括螺纹加工和装配两个主要过程。
集装箱锁紧机构的优化设计说明书
集装箱锁紧机构的优化设计专业:机械制造工艺及设备学生:朱文富指导教师:梁明富完成日期: 2007.05.20扬州职业大学机械工程系目录简介 (3)锁杆的工艺流程分析 (3)锁杆的改进设计 (4)1.锁头与锁座的改进 (4)2.手柄座的改进 (7)3.手柄的改进 (9)4.铆钉的改进 (10)结论 (11)测试报告 (13)保养措施 (16)小结 (22)参考文献 (23)简介在装船和运输过程中,集装箱存在着许许多多的安全隐患,由于集装箱门锁的缺陷,集装箱也会被盗,并且由于设计本身的缺陷,即使集装箱货物已被洗劫一空,人为的掩饰也可以使得这一盗窃行为不被发现,或者说不能够留下足够的证据。
鉴于着一点,集装箱门锁是需要改善和优化的。
常规的集装箱门上有4根锁杆,每根锁杆都有着重要的作用。
锁杆包括:锁座,锁头,定位环,大托盖,大托盖内衬,小托盖,小托盖内衬。
锁座可以通过螺接或者焊接直接装在集装箱的箱框上,而锁杆是通过拖盖连接在门上的,通过锁头与锁座的夹紧固定来起到锁门的目的,而手柄是直接决定锁头与锁座是否配合,夹紧,固定的重要部件,由手柄与锁扣,锁排的配合固定来调整锁头与锁座的角度,最终是其配合固定,因此,我们需要对锁头,锁座,手柄,这些重要部件的改进优化,使其更加具有可靠性,防盗性,安全性,稳定性。
锁杆的工艺流程一套锁杆的制作需要经过以下步骤:切管,套环,点焊,校正,环焊,焊手柄座,打磨,镀锌,打铆钉,包装出库。
切管主要是根据要做锁杆的长度来切下一段钢管,送到工作台上,进行下一步工序:套环,集装箱门后一般有4根杆子,没根杆子有4个环,用于定位的作用,然后再送去点焊,点焊是将工件装配成搭接接头,并压紧在两圆柱形电极之间,利用电阻热融化母才金属,形成焊点的电阻的方法。
点焊时,金属环被放进摸具里,两焊点之间应有一定的距离一减小分流,工件厚度越大,材料导电性能越好,工件表面存在氧化物或胀物是,都会是分流现象严重,提高焊点质量可以通过合理选取焊接电流,通电时间,电及压力,和提高工件表面清理等方法实现。
机械式精密锁紧机构的设计与分析
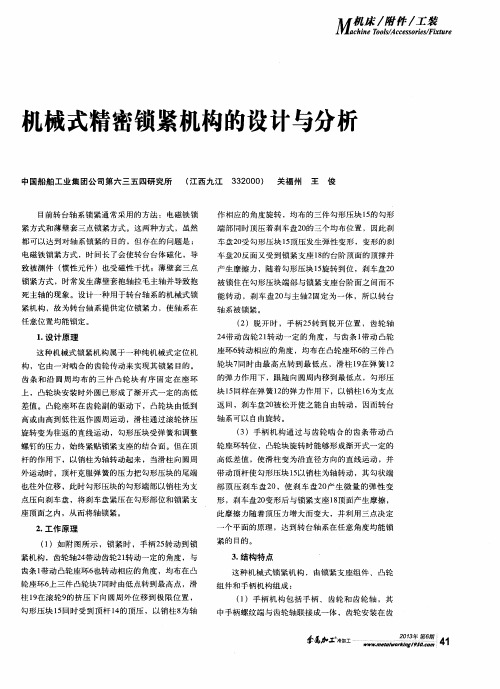
( 1 )手柄机构包 括手柄 、齿轮和 齿轮轴 ,其
中手 柄 螺 纹端 与 齿轮 轴 联 接 成一 体 ,齿 轮安 装 在 齿
磊
籼旺
4 1
1 1
1 6 1 7 1 8
( 3 )锁 紧 支座 组 件 ,包 括 锁 紧 支 座 、锁 紧 支 架 、滑 柱 和 勾形 压块 等 ,三组 锁 紧 支座 组 件 均布 在 与 凸轮 块 对 应 的 圆 周 位 置 。锁 紧 支 座 固定 在 基 座 上 ,锁 紧 支架 固定 在 锁 紧支 座 的侧 面 ,销 柱 固 定在
被锁住在勾形压块端部与锁紧支座 台阶面之间而不
能 转 动 ,刹 车 盘 2 0 与主 轴 2 固 定 为 一 体 ,所 以 转 台
轴柄 2 5 转 到 脱 开 位 置 ,齿 轮 轴 2 4 带动齿轮2 1 转 动 一 定 的 角 度 ,与 齿 条 l 带 动 凸轮
都 可 以达 到 对 轴 系锁 紧 的 目的 ,但 存 在 的 问题 是 : 电磁 铁 锁 紧 方式 ,时 间长 了会 使 转 台 台体 磁 化 ,导 致被测件 ( 惯 性 元 件 )也受 磁 性 干 扰 ;薄 壁 套 三 点
端部 同时顶压着刹车盘2 0 的三个均布位置 ,因此刹
车盘 2 0 受 勾形 压块 1 5 顶 压 发 生 弹性 变 形 ,变形 的 刹
,
1 O 、
1 9
2 0
锁 紧支 架 上 。勾 形 压块 套 在销 柱 上 ,并 与销柱 为轴 转 动 。调 整螺 钉 穿过 勾形 压块 联 接 在 锁 紧支 座 上 , 弹 簧 套在 调 整螺 钉 上 ,将 勾 形压 块 尾端 压 向锁 紧 支 座 。 顶杆 固定在 勾 形 压块 中下位 置 ,与 滑柱 接 触 ,
机械工程中的机构设计与分析

机械工程中的机构设计与分析导言机械工程是一门与机构设计紧密相关的学科,它关注的是机器的设计、制造和运行原理。
在机械工程中,机构设计与分析是一个关键的环节,它涉及到设计师如何选择合适的机构类型以及如何对机构进行透彻的分析和优化。
本文将探讨机械工程中的机构设计与分析的重要性、常见的机构类型以及一些工程实例。
一、机构设计与分析的重要性机构设计可以被视为机械工程中的灵魂,它直接决定了机器的功能、性能和可靠性。
一个优秀的机构设计不仅可以提供所需的力、速度和行程,而且还能够减小能量损失、降低噪音和振动。
因此,机构设计与分析对于机械工程师来说是至关重要的。
在机构设计的过程中,设计师需要考虑多种因素,如运动要求、受力分析、材料选择等。
首先,设计师需要根据机器的功能需求确定所需的运动类型,例如转动、往复、直线等。
其次,设计师需要进行受力分析,以确保机构能够承受所受力的负荷,并且始终保持平衡和稳定。
最后,设计师需要选择合适的材料,以满足机器的性能和寿命要求。
机构设计与分析也需要考虑到经济性和可制造性。
设计师需要在满足功能需求的前提下,尽可能地降低成本和简化制造过程。
同时,设计师还需要考虑到机构的维护和修理问题,以确保机器能够长时间稳定运行。
二、常见的机构类型1. 齿轮机构齿轮机构是一种常见且广泛使用的机构类型。
它利用齿轮之间的啮合作用来传递动力和运动。
齿轮机构有多种结构,如直齿轮、斜齿轮、锥齿轮等。
每种结构都有其独特的特点和适用范围。
例如,直齿轮适用于需要传输大扭矩的场合,而斜齿轮适用于需要传输大功率和平稳运动的场合。
2. 连杆机构连杆机构是一种常见的转动与往复运动转换的机构。
它由连杆和曲柄组成,通过连杆的运动将曲柄的转动运动转化为往复线性运动。
连杆机构广泛应用于内燃机、蒸汽机以及其他需要进行往复直线运动的设备中。
3. 副链机构副链机构是一种由链条和链轮组成的机构,它可以实现不同轴之间的传动。
副链机构具有结构简单、运动平稳和传动能力强的特点,广泛应用于自行车、摩托车等交通工具中。
注塑机液压系统的机械锁紧装置设计和分析

注塑机液压系统的机械锁紧装置设计和分析发布时间:2021-10-15T05:36:36.937Z 来源:《探索科学》2021年9月上17期作者:彭欣欣[导读] 在工程机械和工业机械液压系统中,由于活塞在普通液压缸中依靠液压油支撑,没有精确限位,常常会因为液压油的泄漏或者热胀冷缩,而导致活塞移动位置,从而引起相关运动机构改变位置,使其不受控。
因此在需要精确定位的工况下,常常要求液压缸被机械锁紧。
阐述了蜗轮蜗杆的啮合条件,对主要参数的计算方式进行了说明。
青岛海佰利机械有限公司彭欣欣山东省青岛平度市 266706摘要:在工程机械和工业机械液压系统中,由于活塞在普通液压缸中依靠液压油支撑,没有精确限位,常常会因为液压油的泄漏或者热胀冷缩,而导致活塞移动位置,从而引起相关运动机构改变位置,使其不受控。
因此在需要精确定位的工况下,常常要求液压缸被机械锁紧。
阐述了蜗轮蜗杆的啮合条件,对主要参数的计算方式进行了说明。
根据使用工况,选择了蜗轮和蜗杆合适的材料。
分析了蜗轮蜗杆在运转时的受力情况,对蜗轮齿面强度进行了计算说明,为蜗轮蜗杆的参数化设计提供了指导。
最后,对蜗轮蜗杆的发热情况进行了热平衡分析,并介绍了几种提高散热能力的方法。
关键词:注塑机液压;机械锁紧;设计引言随着我国经济的迅猛发展,注塑制品也逐渐成为人们生活中不可或缺的一部分。
注塑制品一般由注塑机通过注塑成型加工而来。
而锁紧装置是注塑机的重要组成部分,能够保证注塑机的合模时的可靠闭合,防止塑料熔体溢出而造成注塑缺陷的关键部件,故锁紧装置的性能将直接影响塑件成型时的质量。
注塑机中常用的锁紧装置有肘杆式机构、曲柄滑块式机构和蜗轮蜗杆机构等。
肘杆机构所涉及的运动部件较多,能够实现较多的运动模式,但设计复杂,很难发挥其本身的优越性;曲柄滑块式机构能够将驱动电机旋转运动转换为滑块的直线运动,相对肘杆机构简单,但也涉及3个以上的变量,很难选取最佳的组合;蜗轮蜗杆机构是由交错轴斜齿圆柱齿轮演变而来能够将蜗轮的旋转运动转化为蜗杆的直线运动,传动力大,计算校核方式简便。
轴向快速锁紧机构设计

例如,在电子产品生产线中,轴向快 速锁紧机构可以用于锁定电子元件、 线路板和外壳等部件,确保产品的一 致性和可靠性。
06
轴向快速锁紧机构的未来发 展与挑战
技术创新与突破
1 2
应用案例二:航空航天器的安全锁定
01
航空航天器对于安全性的要求极 高,轴向快速锁紧机构能够为航 空航天器的关键部位提供快速、 可靠的锁定,确保飞行安全。
02
例如,在飞机起落架的收放机构 中,轴向快速锁紧机构可以用于 锁定起落架,确保其在飞行过程 中的稳定性和安全性。
应用案例三:自动化生产线上的快速装配
实验验证
根据优化结果制作样机,进行实验测 试,对比仿真分析与实验结果,验证 优化效果。
优化结果与讨论
优化结果
经过多目标遗传算法优化后,轴向快速锁紧机构的锁紧速度提高了25%,锁紧力波动降低了30%,能耗 降低了10%。
讨论
优化结果表明,通过多目标遗传算法对轴向快速锁紧机构进行优化,可以有效提高机构的性能指标。 同时,实验结果与仿真分析结果基本一致,证明了优化方法的可行性和有效性。未来可以进一步研究 其他优化算法在轴向快速锁紧机构设计中的应用,以提高机构的性能和可靠性。
04
轴向快速锁紧机构的优化设 计
优化目标与方法
优化目标
提高轴向快速锁紧机构的锁紧速度、减小锁紧力波动、降低 能耗。
优化方法
采用多目标遗传算法对机构参数进行优化,通过仿真分析验 证析
利用三维建模软件建立轴向快速锁紧 机构模型,进行动力学仿真分析,评 估锁紧速度、锁紧力波动和能耗等性 能指标。
机械工程中的自锁机构设计

机械工程中的自锁机构设计在机械工程领域中,自锁机构是一种非常重要的设计元素。
它能够确保机械装置在运行过程中的稳定性和安全性。
自锁机构的设计涉及到许多因素,包括材料的选择、结构的设计以及力学原理的应用。
本文将探讨机械工程中的自锁机构设计的一些关键要素。
首先,自锁机构的设计需要考虑材料的选择。
材料的选择对于机械装置的性能和寿命有着重要的影响。
在自锁机构中,常用的材料包括钢、铝和塑料等。
钢材具有高强度和耐磨性,适用于承受高负荷和高速运动的部件。
铝材轻巧且具有良好的导热性,适用于需要减少重量的部件。
塑料材料具有良好的耐腐蚀性和绝缘性能,适用于需要减少噪音和振动的部件。
因此,在自锁机构的设计中,根据具体的应用需求选择合适的材料非常重要。
其次,自锁机构的设计需要考虑结构的设计。
结构的设计涉及到机械装置的形状、尺寸和连接方式等。
在自锁机构中,常见的结构包括螺纹、斜面和齿轮等。
螺纹结构是一种常见的自锁机构,它通过螺纹的斜面摩擦力实现自锁。
斜面结构是一种简单而有效的自锁机构,它通过斜面的倾斜角度实现自锁。
齿轮结构是一种复杂而精密的自锁机构,它通过齿轮的齿数和齿形实现自锁。
因此,在自锁机构的设计中,根据具体的应用需求选择合适的结构非常重要。
最后,自锁机构的设计需要应用力学原理。
力学原理是机械工程中的基础理论,它可以解释和预测机械装置的运动和力学性能。
在自锁机构的设计中,常用的力学原理包括摩擦力、静力学平衡和动力学平衡等。
摩擦力是自锁机构中的重要因素,它可以通过摩擦系数和压力计算得出。
静力学平衡是自锁机构中的基本原理,它可以通过受力分析和力矩平衡计算得出。
动力学平衡是自锁机构中的高级原理,它可以通过加速度和力矩的计算得出。
因此,在自锁机构的设计中,应用适当的力学原理非常重要。
综上所述,机械工程中的自锁机构设计涉及到材料的选择、结构的设计和力学原理的应用等关键要素。
在设计自锁机构时,需要根据具体的应用需求选择合适的材料和结构,并应用适当的力学原理进行计算和分析。
机械锁紧装置中凸轮机构分析及优化设计

机械锁紧装置中凸轮机构分析及优化设计邓援超;张立;杨超;徐一鸣【摘要】针对现有机械锁紧装置中凸轮机构存在的刚性冲击问题进行优化设计.首先,分析原凸轮机构的运动过程并建立从动件的位移、速度、加速度方程,提出利用五次多项式曲线对该机构进行优化;然后,通过建立凸轮机构的三维模型,在机械系统动力学自动分析(ADAMS)中,对凸轮机构进行运动学和动力学仿真.结果表明:从动件的加速度大幅减小,机构刚性冲击消除;这类凸轮机构从动件存在运动不确定的现象,并指出运动不确定现象所在的位置.【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2019(040)003【总页数】7页(P298-304)【关键词】锁紧装置;凸轮机构;轮廓线优化;机械系统动力学自动分析;运动仿真【作者】邓援超;张立;杨超;徐一鸣【作者单位】湖北工业大学机械工程学院,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068;湖北工业大学机械工程学院,湖北武汉430068【正文语种】中文【中图分类】TH112.2在需要进行定位锁紧的设备或产品中,如电连接器、数码产品外置记忆卡的插卡装置、电动车的刹车装置等,常常会增加机械锁紧装置.国内外学者对此类锁紧装置做了研究.顾理强[1]分析电子连接器中锁紧装置的静力学和位移曲线;阮理[2]对汽车后排化妆镜中的锁紧装置进行运动学模拟;文献[3-4]对引信用接电开关中的锁紧装置进行结构设计和加速度分析.基于以上理论,本文对可以定位两个位置、实现锁紧位置的快速解锁和锁定的机械锁紧装置中的凸轮机构进行分析,以及运动学和动力学仿真,针对直线型轮廓存在的问题,采用五次多项式曲线[5]对凸轮轮廓进行优化设计.1 锁紧凸轮机构的组成与运动过程锁紧凸轮机构的工作原理主要是滑柱在带有心形槽的凸轮中运动,同时受到竖直滑槽的限制,滑柱运动到凸轮槽锁紧位置时定位锁紧.锁紧凸轮机构由凸轮、滑柱、机座和压簧组成,如图1所示.锁紧凸轮最简单的结构由直线组成,方便制造.图1(b)将锁紧凸轮的廓线简化为连续线段.(a) 三维图 (b) 简图图1 锁紧凸轮机构组成Fig.1 Structures of cam mechanism 锁紧凸轮的运动过程如下:1) 凸轮在外力F作用下向左运动,同时,在压簧1的作用下,滑柱从起始点A移动到第一中间点B,如图2(a)所示,此运动过程定义为行程1;2) 撤消外力F,在压簧1和2的作用下,接触点由第一中间点B移至锁紧点C,如图2(b)所示,此时为锁紧位置,此运动过程定义为行程2;3) 消除锁紧,重新施加外力F,接触点由锁紧点C移至第二中间点D,如图2(c)所示,此运动过程定义为行程3;4) 撤消外力F,在压簧1,2的作用下,接触点由第二个中间点D移至E,最后移至起始点A,回到起始位置,完成一个周期,此运动过程定义为行程4.(a) 运动示意图1 (b) 运动示意图2 (c) 运动示意图3图2 凸轮机构运动示意图Fig.2 Motion diagram of cam mechanism2 锁紧凸轮的廓线方程、滑柱速度和加速度方程(a) 行程1与行程3 (b) 行程2与行程4图3 锁紧凸轮机构的数学模型Fig.3 Mathematical model of locking cam mechanism滑柱的运动规律可通过类速度和类加速度反应,即建立滑柱竖向位移相对于锁紧凸轮横向位移的关系.为便于分析,假定锁紧凸轮不运动,滑柱的横向速度为匀速vx.对锁紧凸轮机构建立以A点为原点的坐标系,滑柱横向运动方向定义为坐标轴ox 的正向,滑柱在推程时的竖向运动方向定义为坐标轴oy的正向.锁紧凸轮机构的数学模型,如图3所示.分别对运动过程中的行程2与行程4中的凸轮廓线进行坐标变换,求解关于坐标轴oy镜像的数学表达式,将锁紧凸轮的廓线方程统一到坐标轴ox正向一致的坐标系中.设Q点为(x,y),锁紧凸轮廓线表达式为f(x),从动件的位移方程为y,即(1)式(1)中:凸轮各点的坐标(xA,yA),(xB,yB),(xC,yC),(xD,yD),(xE,yE),以及a1,b1,a2,b2,a3,b3,a4,b4的值由凸轮的具体尺寸确定.滑柱的速度方程为(2)式(2)中:dy/dx为滑柱的类速度.图4 滑柱类速度图像Fig.4 Image of sliding column analogous velocity滑柱的加速度方程为(3)式(3)中:d2y/dx2是滑柱的类加速度.以某机械设备制动锁紧凸轮机构为例,凸轮廓线的A点至E点的坐标依次为:(0,0),(30,8),(23,14),(30,20),(18,20).由式(1)~(3)可以得到滑柱的运动方程,运用Matlab软件绘制出类速度图像,如图4所示.由图4可知:滑柱类速度在拐点处有突变,加速度在整个运动周期内等于零,但加速度在不考虑零部件的弹性变形的情况下,理论上是无穷大的,锁紧凸轮机构存在剧烈的刚性冲击.3 锁紧凸轮机构的优化原锁紧凸轮机构存在刚性冲击,仅适用于低速场合,易产生振动磨损,会降低原锁紧机构的使用寿命;并且原锁紧凸轮存在拐点,拐点可能导致锁紧装置的失效.为了保证从动件在整个周期内运行顺畅,减少锁紧装置受到的冲击力,使其可以适用不同工作转速和工作载荷的场合,在选择从动件的运动规律时,应保证从动件的速度和加速度变化平稳,并且锁紧凸轮运动时的起始位置和末端位置均无柔性冲击.在凸轮机构中,常用的从动件运动规律包括多项式类型运动规律、三角函数类型运动规律及前两者不同类型的组合运动规律,根据凸轮机构的工作状况选择不同的运动规律[6].五次多项式运动规律的特征值最大速度VM、最大加速度AM、最大跃度JM都较小,综合性能良好,可以适用多种工作载荷和转速,因此,采用五次多项式运动规律[7]对各行程进行设计.为了不影响除机械锁紧装置以外的机构,锁紧凸轮的运动行程不变,即锁紧凸轮廓线中的各点坐标不做改动,基于此,可以得到推程期与回程期的边界条件,即(4)设滑柱的运动规律为y=c0+c1x+c2x2+c3x3+c4x4+c5x5.(5)联立式(2)~(5),可得到优化后的位移方程为其中:由上式可以得到滑柱的运动方程,运用Matlab软件绘制出优化后的类速度和类加速度图像,如图5所示.由图5可知:滑柱运动到锁紧凸轮各行程的初始位置和末端位置,其速度和加速度均为零.(a) 优化后滑柱类速度 (b) 优化后滑柱类加速度图5 优化后滑柱类速度、类加速度图像Fig.5 Optimized image of sliding column analogous velocity and analogous acceleration4 锁紧凸轮的建模与运动学仿真4.1 基于Matlab和ADAMS软件的锁紧凸轮建模及运动学仿真图6 锁紧凸轮机构简易模型Fig.6 Simple model of locking cam mechanism 对锁紧凸轮进行运动学仿真,在机械系统动力学自动分析(ADAMS)中建立锁紧凸轮的简易模型[8-10].对主要零部件凸轮和滑柱建模,其中,锁紧凸轮的模型通过曲线表达.根据锁紧凸轮廓线方程,在Matlab中提取廓线上的点坐标,将得到的坐标导入ADAMS中,生成锁紧凸轮的廓线.优化后的凸轮机构最终生成的模型,如图6所示.对滑柱和凸轮分别建立移动副约束,滑柱与凸轮之间建立点线副.将凸轮的移动副定义为驱动,并根据凸轮的运动情况采用IF函数[11]建立驱动函数,驱动函数包括4段,每一段的运动速度相同.对锁紧凸轮机构进行运动学分析,对各行程优化前与优化后的滑柱运动规律进行对比.行程1为滑柱由起始点A移至第1中间点B,优化前、后的滑柱位移、速度和加速度图像,如图7(a),(b)所示.行程2为滑柱由第1中间点B移至锁紧点C,优化前、后的滑柱位移、速度和加速度图像,如图7(c),(d)所示.行程3为滑柱由锁紧点C移至第2中间点D,其各点相对坐标与行程2一致,在此不做赘述.行程4为滑柱由第二中间点D经点E移至起始点A,优化前、后的滑柱位移、速度和加速度图像,如图7(e),(f)所示.图7中:y为位移;v为速度;a为加速度.(a) 行程1优化前图像 (b) 行程1优化后图像(c) 行程2优化前图像 (d) 行程2优化后图像(e) 行程4优化前图像 (f) 行程4优化后图像图7 各行程优化前后位移、速度、加速度图像对比Fig.7 Images comparison of displacement, velocity and acceleration image before and after optimization of each process在进行运动学分析时,由于未考虑零件的弹性变形,运动学仿真中读取到的最大加速度数值受软件本身步数或步长的影响,加速度理论上在速度突变处都为无穷大.分析以上特性曲线,优化前、后凸轮机构从动件滑柱的速度、加速度,结果如表1所示.表1中:|v|max为速度绝对值的最大值;|a|max为加速度绝对值的最大值;括号内的值为理论值.由表1可知:优化后的速度与加速度变化更加平稳,加速度绝对值的最大值较优化前有较大的改善.表1 锁紧凸轮优化前后参数的对比Tab.1 Comparison of parameters before and after optimization of locking cam参数状态行程1行程2行程3行程4|v|max/mm·s-1优化前优化后5.189.9117.3032.1417.3032.1422.5741.67|a|max/mm·s-2优化前优化后3.71×10-4(∞)20.793.50×10-3(∞)286.973.50×10-3(∞)286.974.42×104(∞)142.814.2 基于SolidWorks和ADAMS软件的锁紧凸轮建模与动力学仿真图8 优化后锁紧凸轮机构装配图Fig.8 Assembly drawing of optimized locking cam mechanism由于锁紧凸轮建模较为复杂,因此,在SolidWorks中建立锁紧凸轮机构的三维模型.采用SolidWorks中方程式驱动曲线的命令,将凸轮廓线的表达式分段输入方程式框中,设定自变量x的范围,生成锁紧凸轮的廓线.对于平面凸轮,可以根据滑柱的大小,建立与滑柱直径相同的柱体,长度为槽深,让其沿着优化后的凸轮廓线进行实体扫描切除,可得到凸轮槽.建立其他零部件三维模型,对锁紧凸轮机构进行装配,装配完成的锁紧凸轮机构,如图8所示.将得到的三维模型导入ADAMS[12-13]中,模型中不运动的零部件采用固定副约束,对凸轮与滑柱分别以移动副约束.凸轮与滑柱之间建立实体接触约束,定义相关接触参数[14-16].对锁紧凸轮机构添加重力、弹簧力约束,定义弹簧力相关参数.建立与运动学仿真同样的驱动形式,根据运行周期编辑运行时间,设定仿真步数为1 000.对优化前、后的锁紧凸轮分别进行动力学仿真,结果如图9所示.由图9可知:除接触力和弹簧力导致速度与加速度存在部分波动外,优化前、后的凸轮在1.3,1.8,2.1,3.5 s处的位移、速度和加速度都出现了较大的波动,即对应图中标识的点1,2,3,4处,这4处分别对应凸轮廓线的A点、B点、C点、D点附近位置,是凸轮廓线的尖点.滑柱运动到这4处时,会出现运动不确定的现象,产生一定的冲击.由图9还可知:这4处的速度与加速度分别对应各行程内的最大速度和最大加速度.(a) 优化前位移图像 (b) 优化后位移图像(c) 优化前速度图像 (d) 优化后速度图像(e) 优化前加速度图像 (f) 优化后加速度图像图9 锁紧凸轮动力学仿真结果对比Fig.9 Comparison of simulation results of locking cam dynamics对优化前、后的锁紧凸轮的特性曲线进行分析,结果如表2所示.与前面运动学分析类似,对各个行程的运动学仿真结果,即速度绝对值和加速度绝对值分别进行比较.由表2可知:各行程优化后的速度都比优化前大,优化后的加速度皆小于优化前.表2 动力学仿真优化前后参数对比Tab.2 Comparison of parameters before and after dynamic simulation optimization参数状态行程1行程2行程3行程4|v|max/mm·s-1优化前优化后202.70400.51235.82260.17173.72179.29351.13388.12|a|max/mm·s-2优化前优化后5.33×1065.25×1053.59×1066.31×1051.44×1061.36×1069.30×1077.89×10 6基于以上分析,优化后从动件的加速度减小,并发现这种锁紧凸轮机构都存在从动件在各行程的衔接位置出现运动不确定的现象,关于从动件出现运动不确定现象的改进也正在研究中.5 结束语对锁紧凸轮机构的组成和运动过程进行分析,建立锁紧凸轮的廓线方程及从动件滑柱的位移、速度和加速度方程.针对锁紧凸轮机构存在的刚性冲击问题,运用解析法,采用五次多项式优化原锁紧凸轮的理论廓线.在ADAMS软件中,建立简易模型对优化前、后的的凸轮机构进行运动学仿真,优化后从动件的加速度大幅减小,凸轮机构的刚性冲击消除.利用SolidWorks建立锁紧凸轮机构的三维模型,在ADAMS中进行动力学仿真,也得到了这一结论.同时,发现优化前、后凸轮机构从动件的速度和加速度在各行程的衔接位置都出现较大的波动,这类锁紧凸轮机构在行程衔接位置都会出现从动件运动不确定的现象.锁紧凸轮的研究方法对今后锁紧凸轮的研究有一定的参考价值,为锁紧装置中凸轮机构的进一步研究提供了问题点. 参考文献:【相关文献】[1] 顾理强.快速卡连接器推退机构耐久性改进研究[D].上海:上海交通大学,2011.[2] 阮理.汽车后排化妆镜的设计[D].上海:上海交通大学,2013.[3] 周小淞,张亚,连云飞.机械式惯性开关设计[J].机械研究与应用,2015,28(6):95-97,100.DOI:10.16576/ki.1007-4414.2015.06.034.[4] 连云飞,王利.引信惯性加速度开关的设计[J].火力与指挥控制,2016,41(3):154-157.DOI:10.3969/j.issn.1002-0640.2016.03.037.[5] 邹慧君.机械原理教程[M].北京:机械工业出版社,2001.[6] 石永刚,吴央芳.凸轮机构设计与应用创新[M].北京:机械工业出版社,2007.[7] 吴佳,何雪明,何楷,等.多项式拟合法在旋盖机凸轮曲线设计中的研究与应用[J].食品与机械,2018,34(6):75-80,151.DOI:10.13652/j.issn.1003-5788.2018.06.016.[8] 李大印.渔线轮移动凸轮机构优化设计过程的二次开发[D].西安:西安工业大学,2018.[9] 徐芳,周志刚.基于ADAMS的凸轮机构设计及运动仿真分析[J].机械设计与制造,2007(9):78-80.DOI:10.3969/j.issn.1001-3997.2007.09.032.[10] DAI Wen,LIU Qiang,YUAN Song-mei.The modeling and simulation of accessory joint based on ADAMS secondary development[J].Mechanical Engineer,2007(9):76-78. [11] 蒲明辉,张冬磊,卢煜海,等.基于MSC.ADAMS的分插机构中补偿机构运动仿真及改进[J].机械传动,2017,41(9):93-97.DOI:CNKI:SUN:JXCD.0.2017-09-018.[12] 陈文华,货青川,张旦闹.ADAMS2007机构设计与分析范例[M].北京:机械工业出版社,2011.[13] 安淑女,王洪欣.单自由度冲压机构优化设计及其运动仿真[J].华侨大学学报(自然科学版),2016,37(5):547-551.DOI:10.11830/ISSN.1000-5013.201605005.[14] 葛正浩,张凯,张双琳.共轭凸轮开口机构的反求设计及动力学研究[J].机械设计,2017,34(12):65-68.DOI:10.13841/ki.jxsj.2017.12.012.[15] 朱皞,葛正浩,苏鹏刚,等.基于ADAMS的平行分度凸轮机构的动力学仿真[J].包装工程,2009,30(6):1-4.DOI:10.19554/ki.1001-3563.2009.06.002.[16] 王莹.纸杯机卷封凸轮机构参数化设计与运动仿真[J].包装工程,2011,32(17):73-75,101.DOI:10.19554/ki.1001-3563.2011.17.021.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
紧机构
1.齿条
2.主轴
3.调整垫圈
4.盖板
5.轴承端盖
凸轮座环7.凸轮块8、16.销柱9.滚轮10、
11.调整螺钉13.弹簧压板14.顶杆15.勾形压块
锁紧支架18.锁紧支座19.滑柱20.刹车盘
平键23.螺母24.齿轮轴25.手柄26.齿轮支座
轮轴轴肩上,用平键和螺母径向和轴向限位,使之与齿轮轴联成一体。
齿轮支座固定在基座上,齿轮轴可以在齿轮支座中旋转。
(2)凸轮组件,包括凸轮块、凸轮座环和齿条,三件凸轮块均布固定在凸轮座环圆周上。
齿条固定在其中两件凸轮块中间的位置,与凸轮座环同圆,并联成一体,凸轮座环安装在基座联接成一体的轴承端盖的台阶肩颈上,使齿条与齿轮啮合并设有盖板轴向限位。
冷加工。