自升式海洋平台齿轮齿条升降系统的研究
自升式海洋平台齿轮齿条升降装置有限元分析

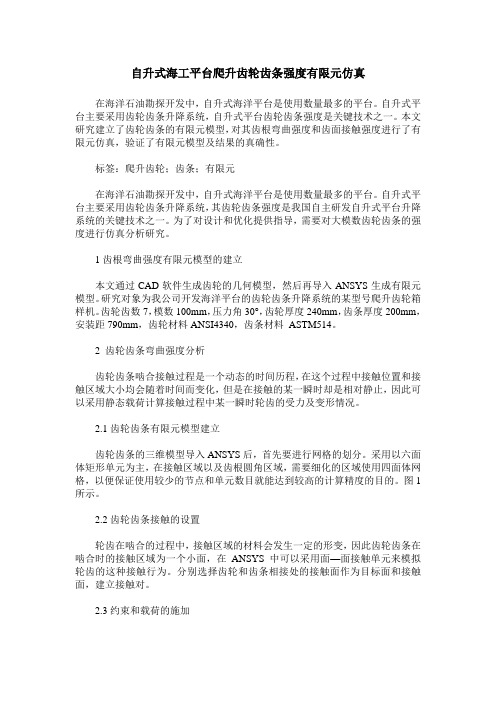
附件接 触 ,此 区域 是最容 易发 生点蚀 。因此主要针 对 05 . s时刻 单 齿啮合 时齿轮 齿 条进 行强 度分 析 。图 8为齿轮 齿条接 触部位 应 力分布 云 图。如 图 8a和 图 8b所 示 ,小 齿轮 与 齿条接 触 区域呈 带状 分布 , () () 沿 小齿 轮 中截面应 力 分布前 后对称 ,最 大接触 应力 分布 于 小齿轮 上 ,小齿 轮与 齿 条接触 边缘 区域 应力 较 大 ,且应 变较大 。
沿 小齿轮 厚度 方 向的应 力变化 曲线 。小齿轮 沿厚度 方 向最大 应 力为 10MP 4O a左右 ,主 要集 中在 小齿 轮 与齿条 接触 的两边 边缘 部位 ,其 余接 触部位 应力 为 10MP 20 a左右 ,分布 比较 均匀 。齿条沿 齿 厚方
向最 大应 为为 1 5 MP 2 0 a左 右 ,主要 集 中与齿 条两 侧边 缘部 位 ;最 小应 力 为 9 0 a左右 ,最 大应 力 0 MP
。
MI se;
S Mi e¥ s
(u : 5 ) A g 7%
(v : 5 A g 7 %)
. .
广 T +10 e+03 .6 7
一
.2o 12i .+ 4 e
2
.
.
.
+2 8+ ,0 3l 0 e
t+ 80 21 .+ 3 e
()齿轮接触部位 a
.
,
7为齿轮 齿条接 触 区域 最 大接触 应 力随 时间变化 的历 程 曲线 。由图 7可 以看 出 , . s 右 由双齿 啮合 03 左 5 区逐渐过 渡 到单齿 啮合 区,双 齿 啮合 区最大接 触应 力变 化 范 围为 80 9 0 a 0 ~ 0MP ,单齿 啮合 区最 大接触
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
自升式平台升降系统齿轮齿条疲劳强度分析
关键词 : 自升式钻 井平 台; 降 系统 ; 升 齿轮 ; 大模数 ; 劳强度 ; 限元 超 疲 有
中 图分 类 号 : E 5 T 9 文献 标识 码 : A
【 ] !』
]
]
Fa i u tg e Ana y i fJ c i g Pi i n a d Ra k f rJ c p Oi Ri l ss o a k n n o n c o a k u l g
W U n YONG J n。 Yo g。 u YUAN a Xio
吴 勇 , 雍 军, 袁 霄
( 四川 宏 华 石 油 设 备 有 限公 司 成 都 研 发 部 , 都 6 0 3 ) 成 10 6
摘要 : 自升 式平 台的升 降 系统通 常采 用超 大模 数 、 少齿数 的齿轮 轴 和齿 条传动 。但 目前缺 少权威 的 疲 劳极 限设 计理 论 , 没有相 关的强度 计算 标 准。依 据 美 国 国家标 准 ANS/ GMA 0 1D0 , 也 IA 2 0 - 4 基 于材料 疲 劳计算 的 SN 曲线 , 结合 设计 寿命 , 算 出超 大模数 齿轮 、 计 齿条 的许 用接 触 疲 劳应 力和 许 用 弯曲疲 劳应 力 , 为强度校 核 的判 断标 准 。采 用有 限元软 件 计 算静 载 荷 下齿 面的接 触 应 力和 齿 作
sr n t n l ss Aco dn oANS / te g h a ay i. c r i gt I AGM A 0 1D0 n a e nme h do — c r eo — 2 0 一 4 a db s do t o fS N u v fma
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
自升式平台齿轮齿条参数优化研究
21 00年 3 中国制造业信息化 月
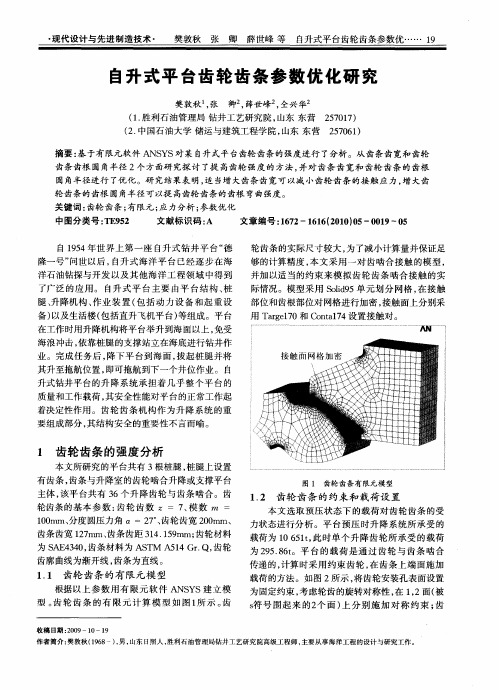
条右端 面 ( 7 约束 , 向的位移 , A1 ) z方 齿条 上端 面
( 8 施 加如箭 头方 向的均 布压 力 。 A1 )
第3卷 第5 9 期
端齿 根 ) 曲应 力 较 小 , 63 a 受 压 侧 齿 根 弯 为 0 MP , ( 4b 中上端 齿根 ) 曲应力较 大 , 7 7 a 图 () 弯 为 3 MP 。
为 固定约 束 , 考虑 轮齿 的旋 转对 称性 , 12面 ( 在 , 被
s 符ห้องสมุดไป่ตู้ 围起来 的2 面 ) 个 上分 别施加 对称 约束 ; 齿
作者简介 : 樊敦秋( 9 8 , , 1 6 一)男 山东 日 照人 , 胜利石油管理局钻井工艺研究 院高级工程师 , 主要从事海洋工程的设 计与研究 工作 。
1 齿轮 齿 条 的 强 度 分析
本 文所 研究 的平 台共 有 3根桩 腿 , 桩腿 上设 置
有齿条 , 齿条与升降室 的齿轮啮合升降或支撑平台 主 体 , 平 台共 有 3 该 6个 升 降 齿轮 与 齿 条 啮合 。齿
轮齿条 的基 本 参 数 : 轮 齿 数 = 7 模 数 齿 、 = 1 0 m、 0 m 分度 圆压 力 角 a= 2 。齿 轮齿 宽 2 0 7、 0 mm、
力状态进行分 析。平台预压时升降系统所承受的 载荷 为 1 5 t此 时 单 个 升 降 齿 轮 所 承 受 的 载荷 06 1,
为 25 8 t 9 .6。平 台 的 载 荷 是 通 过 齿 轮 与 齿 条 啮合
齿廓曲线为渐开线 , 齿条为直线 。
1 1 齿轮齿条 的有 限元模 型 .
・
现代设计与先进制造技术・
自升式海洋平台齿轮齿条接触强度分析
文章编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 7 ) 1 1 — 0 2 8 0 — 0 5
计
算
机
仿
真
2 0 1 7 年1 1 月
自升 式 海 洋 平 台 齿 轮 齿 条 接 触 强 度 分 析
叶福 民, 孟 淼
( 江 苏科 技 大学 机 械 工 程 学 院 , 江苏 镇 江 2 1 2 0 0 0 )
裂纹 对 齿 轮 齿 条 最 大 接 触 应 力 影 响 不 大
关键词 : 自升式平 台; 齿轮齿条 : 裂纹 : 有限元分析 中图分 类号 : T P 3 9 1 . 9 文献标 识码 : B
An a l y s i s o f Co n t a c t S t r e n g t h o f Ge a r a n d Ra c k i n
A B S T R AC T: G e a r r a c k a n d p i n i o n l i t f i n g d e v i c e i s a n i m p o r t a n t f a c t o r t h a t a f f e c t s t h e s f a e t y o f j a c k u p p l a f t o r m, S O i t
m e n s i o n a l mo d e l o f g e a r r a c k a n d t h e n i mp o r t e d i n t o t h e A B A Q U S s o f t w a F e f o r c o n t a c t a n a l y s i s , t h e c o n t a c t s t r e s s ,
浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计

浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计摘要:自升式海洋钻井平台齿轮条爬升与锁紧系统是取得海洋中石油的设备装置中的关键组成部分,分析设计自升式海洋钻井平台齿轮齿条的升降装置与锁紧系统在海中作业的功能,在这个基础上根据现有情况对平台进行改善优化。
了解齿轮齿条爬升与紧锁系统的基本工作原理、自升式海洋钻井平台设计方向,为目前海中石油资源的拓展方向提供强大的基础机械能力。
关键词:自升式海洋钻井平台;齿轮条爬升;锁紧系统1.基本原理工作平台、桩腿、爬升系统与锁紧系统、控制装置、钻井装置(包括动力设备和起重设备)、以及生活区(包括直升飞机平台)这几个部分是自升式海洋钻井平台的主要组成部分。
目前,常用的平台为三桩腿自升式海洋钻井平台,其中的关键零件是位于三桩腿上的爬升系统和锁紧装置,这两者的设计性能优劣会对自升式海洋钻井平台的工作效率、开发石油成果等造成很大的影响,因而我们主要从这两个方面去考虑优化目前所使用的海洋作业机械。
电动机、齿轮齿条爬升结构、桩腿等几个部分构成自升式海洋钻井系统的爬升装置。
下面爬升系统的工作原理的解析:在电动机提供动力的情况下齿轮沿着齿条的运动,带动海洋钻井平台在桩腿上做缓慢爬升的运动,爬升到任何所需要到达的工作位置;然后锁紧系统通过锁紧齿条与桩腿齿条啮合进行锁紧,从而将甲板上重量和运行时的载荷转移到海底的平面,桩腿和平台的上升和下降都依赖于爬升系统而且在正常工作状态及遭遇天气严重巨变状态下支撑船体甲板及相关设备,它有很大的刚度和载重范围使得绝大部分的桩腿受压传至主弦管形成的各向轴向力达到最小程度,易于达到以降低水阻力来增加工作水深度,自升式钻井平台得以进入更深及海况更恶劣的海域工作。
当到达油井的规定位置以后我们可以利用爬升系统将船体升离水面从而为石油的提取做好准备,在提取石油结束后将船体缓慢降回海平面,再利用爬升系统将桩腿升起来使平台重新恢复成漂浮状态然后再拖拉到下一个油井位置开始作业。
海上自升式平台电动升降装置的研究

海上自升式电动升降装置的研究自升式钻井、采油平台及试油作业平台都有升降装置,它的主要功能是,当自升式平台移位时,通过升降装置把平台升离水面,为海上作业做好准备,作业结束后,再把平台降回水面,升起桩脚,使平台重新恢复成漂浮状态,准备拖航至下一个井位作业。
据1955年至今的统计,在所有海上移动式平台中,自升式平台的事故占全部平台事故损失数量的75%。
分析证明了,自升式平台的事故有一半以上发生在拖航和升降平台的时候。
所以对自升式平台升降系统的设计是至关重要的。
1 升降系统的机构形式以三角型平台胜利作业一号为例,如图1所示,在每个角上均有一根三角形桁架型插入式电动单齿条桩腿。
升降装置的传动部分为齿轮齿条传动方式,它主要由固定在桩腿上的齿条及固定在船体上的升降船传动装置—小齿轮、减速箱、电动机和制动器所组成。
每根桩脚有3条齿条各对应有3套升降船装置,而每套传动装置由一台电动机、一台制动器、一台减速器、一台减速箱和一个小齿轮组成。
这样,每根桩腿由3X3传动装置,全平台有3根桩脚,共有27套电动升降船传动系统。
每套升降装置电动机的伸出端装有电磁圆盘式制动器,制动器的制动转矩不小于电动机额定转矩的2倍。
2 升降系统的同步性每根桩脚腿的3X3台电动机和制动器由同一电源,同一组正、反转接触器供电给9台 并联电动机和制动器,以保证每根桩脚的3套齿轮条传动装置的同步性。
如果3X3台电动机或制动器,由于接触器动作失灵、主触点接触不良或电缆断芯均会 破坏同步性造成整个传动装置的损坏,严重的将会损坏齿轮、齿条。
3 工作过程载荷分析升降系统各工况负荷状况可根据图2分析如下:第一工况(0~t1):时间约10min 。
平台开始从浮动状态升船,到平台离开水面为止, 一个小齿轮的受力情况是从空载逐渐加大,最后达到额定负荷,这种工况电动机和小齿轮承受一样负荷,平均值为(890+710+800)/3=800kN 。
第二工况(t1~t2):时间约12min 。
自升式海工平台爬升齿轮齿条强度有限元仿真
自升式海工平台爬升齿轮齿条强度有限元仿真在海洋石油勘探开发中,自升式海洋平台是使用数量最多的平台。
自升式平台主要采用齿轮齿条升降系统,自升式平台齿轮齿条强度是关键技术之一。
本文研究建立了齿轮齿条的有限元模型,对其齿根弯曲强度和齿面接触强度进行了有限元仿真,验证了有限元模型及结果的真确性。
标签:爬升齿轮;齿条;有限元在海洋石油勘探开发中,自升式海洋平台是使用数量最多的平台。
自升式平台主要采用齿轮齿条升降系统,其齿轮齿条强度是我国自主研发自升式平台升降系统的关键技术之一。
为了对设计和优化提供指导,需要对大模数齿轮齿条的强度进行仿真分析研究。
1齿根弯曲强度有限元模型的建立本文通过CAD软件生成齿轮的几何模型,然后再导入ANSYS生成有限元模型。
研究对象为我公司开发海洋平台的齿轮齿条升降系统的某型号爬升齿轮箱样机。
齿轮齿数7,模数100mm,压力角30°,齿轮厚度240mm,齿条厚度200mm,安装距790mm,齿轮材料ANSI4340,齿条材料ASTM514。
2 齿轮齿条弯曲强度分析齿轮齿条啮合接触过程是一个动态的时间历程,在这个过程中接触位置和接触区域大小均会随着时间而变化,但是在接触的某一瞬时却是相对静止,因此可以采用静态载荷计算接触过程中某一瞬时轮齿的受力及变形情况。
2.1齿轮齿条有限元模型建立齿轮齿条的三维模型导入ANSYS后,首先要进行网格的划分。
采用以六面体矩形单元为主,在接触区域以及齿根圆角区域,需要细化的区域使用四面体网格,以便保证使用较少的节点和单元数目就能达到较高的计算精度的目的。
图1所示。
2.2齿轮齿条接触的设置轮齿在啮合的过程中,接触区域的材料会发生一定的形变,因此齿轮齿条在啮合时的接触区域为一个小面,在ANSYS 中可以采用面—面接触单元来模拟轮齿的这种接触行为。
分别选择齿轮和齿条相接处的接触面作为目标面和接触面,建立接触对。
2.3约束和载荷的施加本计算约束齿轮的轴向和径向自由度,周向自由度不约束;将齿条的左右两个端面定义为零位移约束。
自升式海上钻井平台升降系统技术特点分析 (1)

随着海洋开发战略的不断发展,对于海洋工程 装备的需求将日益旺盛,从自升式海上平台升降系 统的发展趋势来看,应着手研究开发电驱动式升降 系统。
参考文献 [1] 《自升式海洋平台齿轮齿条升降系统的研究》 作者:孙永泰
《石油机械》 2004-10-10. 收稿日期:2011-03-09
以每种新的传动形式的升降机构都需要进行破坏试
见表1电动齿轮齿条升降系统厂家名称法国blm荷兰msc美国letourneau驱动方式电动机驱动电动机驱动电动机驱动自升式海上平台升降系统汇总升降单元型号额定提升力c50180tc105270t150t300t170t200t450t270t320t360t齿条型式升降单元布置方案预压拔桩提桩等等每种工况过程中升降机构的受力状况以及升降速度的变化都需要进行分析否则对于升降系统的结构形式和传动方式选择都无法进行
725KIP 800KIP
(320t) (360t)
单边齿条 布置:18
机构的设计制造经验,对于其受力分析、动力学研
究、振动噪声控制、弹性啮合原理以及载荷分配等
(2) 国内方面
方面还需要进一步的研究;
近几年,国内从事海洋工程的各大公司和科研
(3) 高强度超大模数齿轮的设计与制造 与齿条啮合的小齿轮为超大模数齿轮,模数一
驱动 升降单元型号 齿条
升降单元
受力状况以及升降速度的变化都需要进行分析,否 名称
则对于升降系统的结构形式和传动方式选择都无法 法国
BLM
进行;
方式
电动机 驱动
(额定提升力) 型式
布置方案
C50 (180t) C105 (270t)
齿条数/桩腿:2 双边齿条
C50 布置:36 或单边齿条
自升式平台齿轮齿条升降系统结构设计
况设计 了一套齿轮 齿条升降 系统 , 该系统主体由一 个三级直齿圆柱齿轮减速箱和一套差动轮 系组成 , 减速箱的输 出齿轮
通过与差动轮 系太阳轮轴上一直齿 圆柱齿轮啮合建立起二者之 间联 系。该升 降系统具有 两个输 出轴 , 其一为差动轮 系系 杆, 另一输 出轴则通过齿轮与差动轮 系外齿圈啮合。通过合理配齿 实现两输 出轴具有相同的转 向和转速 。 最终形成一套
s t u d y i n gt h e w o r k i n g c o n d i t on i s o f j a c k - u p p l t a f o r m s .T h e j a c k i g n s y s t e m m in a l y c o n s s i s t fU o t Ol e c h a n g e g e r a c a s e nd a a d i f e r e n t i a l ea g r t r a i r  ̄T ey h w e r e c o n n e c t e d b y t e h es m h i n g b e t w e e n t e h o u t p u t ea g r o ft h e t Ol e c h ng a e ea g r c se a nd a a s p u r
海上钻井平台升降系统控制方案研究
1 海上自升式钻井平台概述自升式钻井平台升降系统主要可分为两类,即齿轮齿条升降系统和孔穴插销升降系统。
由于齿轮齿条升降系统具有操作简便、易于对位和并位,以及升降速度快等特点,为适应海上恶劣的勘探条件,新型自升式钻井平台中多采用了这种升降系统。
本文也主要以齿轮齿条式升降系统为例,研究与探讨了其控制操作方案。
2 海上钻井平台升降系统的动力方案与结构组成2.1 动力方案选择齿轮齿条升降系统按照动力驱动方式的不同,主要分为电驱动方式与液压驱动方式这两种。
其中齿轮齿条电驱动升降系统,即是齿轮箱通过电马达驱动,再带动小齿轮的运转和桩腿的升降动作;齿轮齿条液压驱动则是采用液压马达进行驱动。
然而在实际应用中发现,液压驱动方式的故障率更高,而且需要额外添加一个液压站,成本更高,因此在实际应用较少。
在本文中,选择电驱动作为齿轮齿条式升降系统的动力方案。
2.2 结构组成齿轮齿条电驱动升降系统的结构主要是由动力驱动系统、动力传动系统以及升降控制系统这三大部分所组成。
其中,动力驱动系统和动力传动系统主要由电马达、齿轮箱、齿轮齿条、减速机构等组成。
而升降控制系统作为整个海上钻井平台升降系统的关键所在,其不仅需要控制电机的运行和桩腿的升降,还需要通过对桩腿高度的实时控制与监测,以保持平台面的水平。
本文研究的升降控制系统采用了分布式控制方案,并基于可编程逻辑控制器PLC实现现场各个升降点的系统控制与全过程监控,从而全自动的实现了平台与桩腿的同步升降、自动测量、过程显示、姿态纠正、故障报警等多项功能。
3 海上钻井平台升降系统的控制方案3.1 总体控制方案海上自升式钻井平台升降系统采用了分布式的控制方案,在桩腿与平台的升降过程中实现了全自动的控制、定位与监视功能。
整个分布式控制方案的系统结构可以分为三层。
第一层为中央控制室:包括了显示器、工控机、ET200从站等,其功能是便于人机交互,实现全过程的监控;第二层为配电室:包括了变频控制PLC主站、封装控制单元、变频控制单元等等,其中变频控制PLC主站是整个控制方案的核心元件,其功能主要用于控制所有电机的正常运转;第三层为现场控制箱:包括了3个桩腿和PLC控制箱、现场总线PROFIBUS-DP与PLC控制箱、中央控制器相连接,从而实现各层间的数据信息传递,保证了数据信息的分散控制与集中化处理。
海洋钻井平台齿轮齿条升降装置动态响应分析

海洋钻井平台齿轮齿条升降装置动态响应分析程文龙西安石油大学机械工程学院710065摘要: 自升式海洋钻井平台齿轮齿条升降装置的动力学特性对平台结构安全性能具有极其重要的影响。
本文在动力学分析的基础上,建立了多对齿轮齿条啮合下升降装置的动力学模型,研究了齿轮时变啮合刚度对系统动态响应的影响规律,同时利用Soildworks与ADAMS 联合建模方法,进一步分析了升降装置最大负载工况下齿轮齿条之间的接触力以及齿轮转速随时间的变化规律。
研究结果表明,齿轮齿条升降装置齿轮的输出转速因内部激励的影响随时间发生变化,并且与啮合力之间存在冲击峰值的同步性; 在同一工况条件下,相对于齿条对称分布的两个齿轮,同一时间受到的径向力的大小相等,方向相反,并且切线方向的接触力大小之和均约等于负载。
研究结果可为自升式海洋钻井平台齿轮齿条起升系统的优化设计提供参考!关键词:海洋钻井平台; 齿轮齿条升降装置; ADAMS; 动态响应; 啮合刚度0 引言升降装置作为自升式海洋平台的重要设备,它的主要作用是:当自升式平台到达海上井位时,通过升降装置把海洋平台主体升至水面工作位置,为海上作业做好准备;作业结束后,再将船体降回水面。
升起桩腿,使平台重新恢复成漂浮状态,准备拖航至下一个井位作业[1]。
随着自升式海洋平台向更深水域发展,升降装置多采用电动齿轮齿条式[2]。
电动齿轮齿条式升降装置多用于桁架式桩腿,它由电动机经过减速机构带动齿轮传动,使齿轮与桩腿上的齿条啮合[3],从而完成平台主体和桩腿之间的相对运动。
当电动机处于制动状态时,则可将平台主体固定于桩腿的某一位置[4]。
本文应用Soildworks软件对齿轮齿条式升降系统进行参数化建模,将其装配模型导人到ADAMS软件中.建立虚拟样机模型[5]。
继而对该模型进行动力学仿真,得到其转速、接触力等特性曲线,并对其进行分析,为动态特性优化进行理论指导。
1三维实体建模齿轮齿条升降装置采用齿轮齿条啮合的传动方式带动船体升降。
JYM―J20054型自升式海上钻井平台升降系统研制

JYM―J20054型自升式海上钻井平台升降系统研制摘要:安装有国内首制并拥有完全自主知识产权升降系统的“DSJ300-3”和“CP300-3”两座自升式海洋石油钻井平台,已分别在大连重工和辽河重工下水站桩。
这两座平台应用的JYM-J200/54型升降系统均由广东精铟海洋工程股份有限公司自主研发,设备整体制造及试验过程由中国船级社(CCS)专家组全程监控,并取得CCS产品证书。
同时,JYM-J200/54型升降系统整体设计通过了美国船级社(ABS)总部审核;控制系统可靠性通过了挪威船级社(DNV)验证。
关键词:自主知识产权;升降系统;自升式钻井平台中图分类号:TE923 文献标识码:AAbstract:Install the domestic first and have complete independent intellectual property rights of the lifting system “DSJ300-3”,“CP300-3”two self elevating offshore oil drilling platform,were in Liaohe heavy water station.JYM-J200/54 type lifting system of the two platforms used by Guangdong refined indium machinery limited company independent research and development,equipment certificate of CCS products. At the same time,JYM-J200/54 type lifting system design through the USA Classification Society (ABS)Americaheadquarters to review;the reliability of the control system through the Norway Classification Society(DNV)verification.Key words:Independent intellectual property rights;lifting system;jack up drilling platform1 前言安装有国内首制并拥有完全自主知识产权升降系统JYM-J200/54的“DSJ300-3”平台2014年3月在大连重工下水站桩(图1),“CP300-3”平台2014年7月4日在渤海装备辽河重工下水(图2)。
自升式海洋钻井平台升降系统齿轮齿条啮合接触分析

工业技术科技创新导报 Science and Technology Innovation Herald57渤海某自升式海洋钻井平台通过齿轮齿条升降装置进行升降调节,以适合不同工作海况水深。
齿轮齿条升降装置的工作是通过液压马达或电机驱动与齿条相对应的小齿轮,小齿轮沿齿条运动,实现平台的升降。
作为升降系统的主要承载力部件,齿轮齿条啮合处既需要在升降状态下完成桩腿及甲板的升降,还需要在正常工作状态及风暴自存状态下支撑船体甲板及相关设备,长时间处于承受重载的状态(包括动载荷)。
因此,齿轮齿条的应力分布和强度是关系到整个平台安全性能的一个重要因素[1-3]。
目前在海洋工程领域,关于自升式钻井平台齿轮齿条强度的校核,尚无较为明确的规范,一般认为对于这种低速、重载、开式齿轮齿条的强度校核,以齿根弯曲应力强度校核为主。
该文利用有限元分析软件作为工具,采用接触分析自升式钻井平台齿轮齿条强度校核进行探讨。
1 平台参数渤海某平台,平台主体结构为驳船型式。
平台有三根圆柱桩腿,内部设有环筋等骨材,每根直径2.74 m(9英尺),长56.7 m,平台承受载荷通过桩腿传递给桩靴。
每根桩腿设有两列齿条,成180度夹角,桩腿壁厚有1.5~2.5 inches不等。
桩腿材料采用高强度钢,型号为A B S D H36,屈服强度为51ksi (3587 kg/cm 2)。
平台单桩最大承载力为600KIPs (272.2 t/小齿轮),齿轮齿条具体数据如下:齿轮:3/16"pitch7齿渐开线齿面齿轮齿轮厚度:8.5"齿宽:8.3074"分度圆直径:37.833"齿轮材料:SAE4340 齿条:直线齿面齿条厚度:5"齿根深:5.333"齿顶高:5.177"齿条材料:AISI 87352 计算模型为了模拟齿轮齿条啮合机构,在建模时,需要定义齿轮、齿条接触面为接触对,在计算上属于非线性接触问题。
自升式平台齿轮齿条升降装置三维接触有限元分析
性 ,用钢量少,造价低 。它在飘泊状态具有船舶的特性,在钻井状态又好似一个固定建筑物 ,具有固 定式平 台 的性 质 Ⅲ。
目前 ,我 国大多数海 上 活动式 钻井 装置 是 自升 式平 台 。据 有关 资料 统计 , 15 年至 今在所 有海 95 上 移动 式平 台 中, 自升式平 台的事故 占全部 平 台事 故损 失数量 的 7 % 。分析表 明, 自升式平 台 的事 5 故 有~ 半 以上 发生在 拖航 和升 降平 台的时候 。升降装 置作 为 自升 式平 台 中的关键部 分 ,其性 能 的优
4 9卷
增刊 2 20 0 8年 1 1月
中
国
造
船
V 1 9 S e il o . p ca 4 2 NO . 0 8 V2 0
S P ,LDI HI BI q NG OFCHI NA
文 章编 号 :10 .8 22 0 )23 20 04 8 (0 8¥ —4 —6 0
性分析及疲劳分析奠定 了 基础。
关 键 词 : 自 升式平台;齿轮齿条升降装置;有限元法;三维接触分析
1 引 言
自升式平 台是 上世纪 五十年 代 中期 发展起 来 的海上活 动式钻井 装 置 , 它是 由驳船 型船体 、 腿 ( 桩 有 的带整 体沉 垫 ) 、升 降机 构 、钻井 设备 、动 力装置及 有关 附属 设施所 组 成 。它 的优 点是 :能适应 不 同 水深 的作业 ,遇 到意外 高海浪 时 ,一 定程度 上可 以调整平 台的空气 间隙 :作业 时有 良好 的抗侧 向移动
度快 、操作灵活 。只要加大装置的动力,升降的速度就能提高 。当动作停止时,必须啮合刹车来撑 住整 个重 量 ,全部载荷 有几 个齿 轮来分 担 ,这就 要求任 何一个齿 轮 都不会 由于 载荷 分配 的不均 ,在相
自升式海洋钻井平台升降系统的分析与研究

自升式海洋钻井平台升降系统的分析与研究作者:吴碧珺来源:《科技创新与应用》2015年第16期摘要:随着世界经济的飞速发展,海洋开发己经成为世界技术革新的重要内容,而海洋油气田的开发又是现今海洋资源开发利用的重中之重。
自升式海洋钻井平台是海洋油气勘探和开发的主要装备。
目前,国内使用的钻井平台中的控制系统基本都由国外制造,国内对其升降系统的分析相对较少。
所以,探讨和研究这一方面的内容意义深远。
关键词:自升式平台;升降系统;齿轮齿条式1 概述升降系统是自升式海洋钻井平台的关键部分。
其位置位于平台的主体和桩腿的交接处,作用是让桩腿和船体作相对的上下运动,从而使得平台主体能上下移动并将其固定在桩腿的某一位置。
根据升降系统结构形式的不同,一般可分为液压油缸式升降系统和齿轮齿条式升降系统。
液压油缸式的优点是:油缸的结构简单,力的传递直接,安全性高。
缺点是:桩腿升降框架的结构庞大,用钢量很大,操作的工序相对更复杂。
齿轮齿条式的优点是:升降运动连续性好,传动的速度快,可调速,受载均匀,操作简单,井位易对准。
缺点是:齿轮齿条的制作难度大,成本高,控制相对复杂。
由于海洋环境比较恶劣,平台升降所需要的时间对于平台的安全性就显得非常重要,同时运用齿轮齿条式升降平台可减少平台的就位费用,因此目前多采用此类系统。
2 齿轮齿条升降系统的设备组成齿轮齿条式升降系统通常由升降装置、升降框架、导向装置、桩腿以及电控系统组成。
升降装置一般由电动机、减速箱、制动器、小齿轮等组成,如图1所示。
电动机以前常用的是滑差式电机,后来变频技术越来越成熟,而且控制方便,于是逐渐取代了滑差式电动机。
减速箱一般由平行轴轮系和行星轮系两部分构成,速比很大,有的甚至上万。
制动器通常选择的是电磁圆盘式,其扭矩一般不小于1.2倍的暴风载荷。
小齿轮由高强度合金钢经特殊工艺加工而成,齿数一般为7齿,模数通常为80以上,目前世界上最大的小齿轮模数已经达到了110。
图1 齿轮齿条升降装置升降框架一般为封闭性环梁结构,如图2所示,它是连接升降装置和平台主体的框架,起承上启下的作用。
自升式海洋平台升降传动系统设计关键技术研究的开题报告

自升式海洋平台升降传动系统设计关键技术研究的开题报告一、研究背景及意义近年来,随着海洋工程的快速发展,大型海洋平台的建设需求不断增加。
例如,海上风电、海上油气开发等领域,在平台建设过程中,升降传动系统是一个重要设备,关乎到平台的稳定性和运行效率。
因此,对海洋平台升降传动系统设计关键技术的研究具有十分重要的意义。
二、研究目标本研究旨在开展自升式海洋平台升降传动系统的设计关键技术研究,主要包括以下目标:1.分析海洋环境对升降传动系统的影响,确定升降传动系统的设计参数。
2. 研究自升式海洋平台升降传动系统的控制策略,实现升降过程的控制和稳定。
3.研究升降传动系统的结构设计与工艺制造,保证系统的可靠性和稳定性。
三、研究内容本研究将主要围绕自升式海洋平台升降传动系统的设计关键技术展开研究,具体研究内容包括:1. 海洋环境分析与设计参数确定:通过对海洋环境进行分析,确定海洋平台升降传动系统的设计参数,包括升降高度、升降速度、承受载荷等。
2. 控制策略研究:研究自升式海洋平台升降传动系统的控制策略,实现升降过程的控制和稳定,包括PID控制策略、模糊控制策略、神经网络控制策略等。
3. 结构设计与工艺制造:研究升降传动系统的结构设计与工艺制造,保证系统的可靠性和稳定性。
包括结构材料选型、组合方式设计、工艺加工等。
四、预期结果经过以上的研究和实验,我们预期将得到以下成果:1. 海洋环境分析与设计参数确定:确定自升式海洋平台升降传动系统的设计参数,包括升降高度、升降速度、承受载荷等。
2. 控制策略研究:针对自升式海洋平台升降传动系统的运动特点,设计出一种适合的控制策略,保证升降过程的控制和稳定。
3. 结构设计与工艺制造:通过分析研究,确定适合自升式海洋平台升降传动系统的结构材料、组合方式设计、制造工艺等,保证系统的可靠性和稳定性。
五、研究方法本研究采用理论分析与数值模拟相结合的方法,具体分为以下几个步骤:1. 理论分析:通过文献查阅和专家咨询等方式,对海洋平台升降传动系统相关的理论知识和现有技术进行分析。
海洋平台爬升齿轮轴的开发与研究
海洋平台爬升齿轮轴的开发与研究发表时间:2017-11-09T18:54:47.327Z 来源:《基层建设》2017年第23期作者:唐亚宁[导读] 摘要:自升式海洋平台爬升装置系统是钻井平台设备装置中的关键组成部分。
本文主要阐述了平台升降装置中关键部件爬升齿轮轴的产品研发、生产工艺中关键问题的解决方案、材料性能与制造工艺的对应关系及实现路线。
韶关市中机重工股份有限公司广东韶关 512000摘要:自升式海洋平台爬升装置系统是钻井平台设备装置中的关键组成部分。
本文主要阐述了平台升降装置中关键部件爬升齿轮轴的产品研发、生产工艺中关键问题的解决方案、材料性能与制造工艺的对应关系及实现路线。
关键词:爬升齿轮轴研发、技术工艺与材料性能指标的相互影响、解决方案1.概述自升式平台是海洋工程装备最重要的装备.随着能源的发展、海洋石油天然气的钻探、海洋施工等,需要大量的自升式平台。
平台的发展衡量了一个国家海洋工程装备的水平。
目前,海洋平台分为石油钻井平台、采油平台、修井平台、施工工程平台、生活服务平台等。
近年来,随着我国装备制造业的发展,在平台制造技术上取得了突飞猛进的进步,我国现已成为世界上最主要的平台制造国和供应国。
2.项目要求从上世纪90年代以来,爬升装置由以前的插销式进步为桁架式的齿轮齿条式。
桁架式自升平台依靠爬升装置进行上下运动,以达到钻井、工程施工的目的。
爬升齿轮轴是升降装置中最关键的零部件,每个齿轮最大工作载荷为600吨,并需要通过风暴试验,其许用应力要达到工作应力的2.5倍以上,所以对爬升齿轮轴材料要求性能比较苛刻,需要材料具有高强度、高耐疲劳性、高低温冲击韧性、高可靠性等特点;例如JU2000E平台(400英尺)的爬升齿轮轴的性能要求如下:按照船级社要求,该零部件均为本体取样,所以对部件的制造工艺和设计提出了新的要求。
针对该材料的高性能要求,我公司于2007年开始进行研制开发,开发的产品已成功取代韩国、德国进口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
。升降系统作为自升式平台
中的关键部分,在平台的设计制造中历来受到高度 重视,其性能的优劣直接影响平台的安全和使用效 果。自升式平台的升降系统大致分为两大类:齿轮 齿条式和液压油缸顶升式。齿轮齿条式升降的优点 是:升降速度快;操作简单;易对井位。缺点是齿 轮齿条式价格贵,制造难度大。 由于海洋环境条件相对比较恶劣,平台升降所 需时间的长短对平台安全性也就显得比较重要,同 时可减少平台就位费用,因此新造的自升式平台多 采用齿轮齿条升降方式。
为确保平台升降安全、可靠,设计中采用了多 种安全保护措施: ・% 台主泵并联互为备用,在 # 台甚至 " 台损 坏的情况下,仍能保证以相对慢的速度升降。辅助 油路中 % 台并联的先导泵,亦互为备用,确保了为 主油路、刹车及速度转换提供动力,增强了平台脱 离危险状况的能力。 ・在控制上设置 # 个集控台和 % 个桩边控制 台,在集控台上设自动控制与手动控制,一旦集控 台失灵则可在桩边控制台上操作平台升降。同时设 置了 & 种操作模式:为液压油加热,使整个系统的 油温达到系统安全运行的水平;升降桩腿,有手动 和自动两种程序操作,用于自海底升起桩腿或放桩 腿至海底;提升平台脱离水面和下放平台到水面; 释放因长时间刹车而引起的应力;确保平台升降时 在正常的载荷范围内;在升降前均提示诸如压载舱 是否排空等方面的信息。 ・通过液压系统中的平衡阀块实现刹车的一级 保护,比例阀块实现二级保护,这两级保护可实现 在液压源失效时平台或桩腿安全停留在原位置,作 用顺序为首先平衡阀块起作用,若失效则比例阀块 起作用。系统中设置了由液压控制、弹簧刹车的盘
齿轮齿条升降系统构成
所谓齿轮齿条升降系统,就是在平台的每根桩 腿上设置几根齿条,对应于每根齿条上设置几个小
#
孙永泰,高级工程师,生于 $678 年,$69: 年毕业于上海交通大学机械工程系,现从事海洋工程研究与设计工作。地址: ( &8:’$: )
山东省东营市。电话: ( ’8#7 ) 9:9"7:" 。
[ !] 力,图 * 为升降系统液压原理图 。设计分为主油
动力驱动系统研究
胜利作业 % 号平台属于齿轮齿条升降的 % 腿自 升式修井作业平台,钢质非自航。由平台主体、桩 腿( 带桩靴) 和升降系统 % 部分组成。平台主体 平面接近三角形,% 根圆柱形桩腿布置在艏、艉。 平台的主要任务是对水深 & ’ !& ( 范围内的油井进 行修井作业。平台每根桩腿上设置 ! 根齿条,对应 每根齿条上配备 % 个小齿轮;这样每根桩腿上共有 ) 个小齿轮,) 个小齿轮同步动作带动平台或桩腿工 作;每个小齿轮由 * 个液压马达通过对应的行星减 速箱来带动;平台通过固桩架传力于齿轮箱上的小 齿轮,小齿轮通过与桩腿上的齿条啮合传力于桩腿; 平台上设 * 个液压站、* 个集中控制台和 % 个桩边控 制台以及马达控制中心、液压动力控制单元等。 *+ 升降系统主要技术参数 平台正常举升力 , 腿:- ... /0; 平台应急举升力 , 腿:*. 1.. /0; 平台预压载荷 , 腿:*% !.. /0; 平台最 大 提 升 速 度 ( 在 正 常 载 荷 条 件 下 ) : .+ % ( , (23; 平台应急提升速度:.+ * ( , (23; 最大放桩速度( 正常载荷下) :.+ ) ( , (23; 升降频率:每个星期升降 * 次,升和降的距离 均为 *1 (; 小齿轮参数:齿数 4,模数 4& ((,压力角 !45。 !+ 参数确定原则 该平台最大提升速度( 在正常的载荷条件下) 定为 .+ % 万方数据 ( , (23 基于以下因素:由于平台升降系统
— (+ —
- - - - - -
石- 油- 机- 械
(%%# 年- 第 "( 卷- 第 !% 期
式刹车机构,一旦系统出现异常( 如失电、超载、 超速等) ,将自动刹车。 ・增加升降能力储备,在单桩 ! 台马达损坏时 仍能进行平台升降。 根据升降系统的总体设计、配置、部件选型及 经验数据,参数确定如下
万方数据
( 收稿日期:&’’" ; $& ; &$ )
— !9 —
8 8 8 8 8 8
石8 油8 机8 械
!..9 年8 第 %! 卷8 第 *. 期
液压马达,可使升降系统针对不同的载荷采用不同 的速度,这样便节省了平台升降的时间;!采用大 扭矩、低转速的液压马达可减小减速箱的传动比, 从而减小其尺寸和造价。 ( ! ) 从操作方式及故障率来看,两种升降方 式均要设置集中控制台和桩边控制台,集中控制台 内设置 "#$ 进行控制作业,均可实现所有桩腿同 时控制和手动单桩控制及紧急制动。但液压驱动相 对电驱动故障率较高,故液压驱动必须设置专家诊 断系统。 ( % ) 液压驱动需设置液压站,而电驱动不需要。 综合液压驱动与电驱动两种方式各自的优缺 点,采取其中任何一种方式都可以。笔者在此将结 合胜利作业 % 号平台升降系统研究液压驱动的齿轮 齿条升降系统。
路系统、辅助油路系统和增压油路系统。 ( * ) 主油路系统8 该系统主要包括 * 个油箱、 % 台主泵、% 套带载 , 卸载模块、% 套主油路控制模 块和 *1 台液压马达等。 油箱上装有液位开关( 控制低油位和最低油 位) 、油温调节器( 调节油的低温、最低温、高温 和最高温度) 、呼气阀、加热器、液位测量尺和检 查用人孔盖。 % 台主泵分别对应于 % 根桩腿装在油箱上,以 减小所占的空间,平台和桩腿的升降速度将由伺服 阀控制泵来实现,输入至泵和伺服阀各处的压力, 由相应的压力开关检测,泵供油至带载 , 卸载模块 和液压马达。% 台泵并联,互为备用,保障即使在 * 台泵损坏的情况下,另 ! 台泵仍能提供平台以相 对小的速度进行普通升降所需的动力。所有的主泵 在无负载时以低压力运行。 % 套带载和卸载阀块装在液压站中,每 * 阀块 用于 * 根桩腿,阀块的作用是保护主泵不致过压。 % 套主油路控制模块分别用于控制 % 根桩腿, 每个模块分别用于控制特定桩腿上的 ) 台马达。 每个模块包括:* 个伺服比例换向阀用于控制 平台或桩腿的运动方向及动作速度;! 个平衡阀用 于锁定桩腿和平台的质量及稳定其动作速度;* 个
! ! &’’# 年! 第 "& 卷! 第 $’ 期 !设计计算"
石! 油! 机! 械
()*+, -./012.34 4,()*+.05
! ! ! ! ! !
— &" —
自升式海洋平台齿轮齿条升降系统的研究
孙永泰
#
( 胜利石油管理局钻井工34; 号平台升降系统为研究对象,提出了齿轮齿条式升降系统的总体设计思 路;针对海洋平台升降系统的设计要点,对齿轮齿条式升降系统中的液压动力驱动系统分 # 种工 况进行了升降系统液压原理设计、分析、参数确定和计算,并提出了确保系统安全可靠性的多项 保护措施。其设计思想、设计中所采用的方法、参数确定方法及计算分析所得出的结论,对平台 的设计、制造和管理具有一定的指导意义,对类似系统的设计、分析计算具有一定的参考价值。 ! ! 关键词! 自升式平台! 齿轮齿条! 升降系统! 动力驱动系统! 液压系统 齿轮,齿条及其对应小齿轮数量根据平台所要求的
:
桩腿导向效率 !! $ %& ’ ;齿条与齿轮啮合效率 !( $ %& ’( ;齿轮轴承效率 !" $ %& ’) ;行星减速器 效率 !# $ %& ’# ;液 压 马 达 运 行 时 机 械 效 率 !* $ %& ’# ;液压马达启动机械效率 !+ $ %& ,* ;液压马 达容积效率 !, $ %& ’, 。 液压驱动系统分 # 种工况的计算结果( 均为 马达启动工况) 见表 ! 。
在工况恶劣的海上作业,平台升降及移位必须在风 速小于 *! ( , 6、波高小于 .+ & (、海流流速小于 *+ !1& ( , 6 等条件下进行,这种好天气通常持续时 间较短。在多数情况下,平台自 * 个井位完成降平 台、升起桩腿、拖航至下一井位、并完成平台放 桩、定位、升平台,通常应在 *! 7 内完成,这样 就要求升降速度越快越好;但该系统属于大型重载 系统,要有高的安全可靠性。随着升降速度的提 高,平台围井区结构强度、桩腿结构强度、动力传 递系统强度及驱动能力等将成倍增长,造价亦会提 高,因此,平台升降速度应根据其作业环境及使用 要求进行确定。 平台应急提升速度为 .+ * ( , (23,应包括两种 情况:一是在平台某一桩腿上的 * 套齿轮传递系统 或马达损坏而又必须进行平台升降;二是平台未卸 载而进行平台升降,此时升降能力要求大,因此应 计算而定。 最大放桩速度为 .+ )( , (23,既充分利用系统 的潜能,同时又考虑了平台就位时的工况需求。 %+ 升降系统液压原理 液压系统的主要功能是为整套升降系统提供动
"((! 年$ 第 %" 卷$ 第 #( 期
孙永泰:自升式海洋平台齿轮齿条升降系统的研究
$ $ $ $ $ $
— "’ —
安全阀;! 个单向阀;" 个压力传感器和各种压力
开关用于检测压力。
图 #$ 齿轮齿条升降系统液压原理图
$ $ 在整套主油路系统中,% 个桩腿的相对速度由 比例换向阀来控制,每根桩腿上的 & 个马达油路并 联,由桩腿和平台围井区上的导向机构保持其刚性 同步。 ( " ) 辅助油路系统$ 辅助油路系统包括 % 台先 导泵、% 套刹车和速度选择模块及 % 个蓄能器等。 % 台先导泵并联,互为备用,每个先导泵配置 # 个溢流阀,用于调定泵的压力。 每 # 根桩腿都有相应的刹车控制和速度选择模 块,这些模块包括刹车用换向阀、马达速度选择用 方向控制阀、刹车时控制速度用的单向阀和测试刹 车释放压力的压力开关。% 套蓄能器在液压源出现 故障时仍可保证主油路工作。 ( % ) 增压油路系统$ 增压油路系统用于给主油 路、辅助油路提供一定压力的液压油,同时还可为 整套系统的液压油进行加热和冷却,它包括 " 台喂 油泵、滤油器、溢流阀、截止阀及压力测量开关等。 在控制系统中整套液压系统的 % 根桩腿的运动 速度,由 % 套主油路控制模块上的比例换向阀分别 控制,而 % 根桩腿上的 & 个液压马达为刚性同步, 即 & 个马达并联,靠桩腿或平台的质量即马达的负 荷实现同步。 万方数据