发那科机器人备份和恢复操作
发那科机器人备份与加载(一)2024
发那科机器人备份与加载(一)引言概述:发那科机器人备份与加载是指在机器人控制系统中进行相应的文件备份和加载操作。
通过备份机器人的配置文件和程序,可以有效地保护机器人数据免受意外损坏或丢失的影响。
而加载备份文件,则可以在需要时快速还原机器人的配置和程序,并加快机器人的恢复速度。
本文将详细介绍发那科机器人备份与加载的操作流程。
1. 备份机器人配置1.1 打开机器人控制系统1.2 进入备份功能界面1.3 选择配置备份1.4 设置备份文件保存路径1.5 开始备份机器人配置1.6 等待备份完成提示信息2. 备份机器人程序2.1 进入程序管理界面2.2 选择程序备份2.3 设置备份文件保存路径2.4 选择需要备份的程序2.5 开始备份机器人程序2.6 等待备份完成提示信息3. 加载机器人配置3.1 打开机器人控制系统3.2 进入加载功能界面3.3 选择配置加载3.4 浏览加载文件路径3.5 选择需要加载的配置文件3.6 确认加载配置文件4. 加载机器人程序4.1 进入程序管理界面4.2 选择程序加载4.3 浏览加载文件路径4.4 选择需要加载的程序文件4.5 确认加载程序文件5. 总结发那科机器人备份与加载操作能够提供有效的数据保护和快速恢复机制,确保机器人在遭受意外损坏或丢失后能快速恢复正常运行。
通过备份机器人的配置和程序,可以防止重要数据的丢失,减少生产中的停机时间。
加载备份文件时,注意选择正确的备份文件并确认加载操作,以免出现配置或程序不匹配的问题。
定期进行备份和加载操作是机器人运维的重要环节,有助于提高机器人的稳定性和可靠性。
fanuc参数备份及恢复方法

fanuc参数备份及恢复方法Fanuc参数备份及恢复方法Fanuc是全球知名的工业机器人制造商,其产品广泛应用于制造业的各个领域。
在使用Fanuc机器人时,为了确保机器人的正常运行,我们通常需要对其参数进行备份,以便在需要时能够及时恢复。
本文将介绍Fanuc参数备份及恢复的具体方法。
一、Fanuc参数备份方法1. 进入Fanuc机器人控制器的菜单界面。
通常情况下,我们可以通过连接电脑与机器人控制器,使用Fanuc自带的控制软件来实现。
2. 在菜单界面中找到“参数备份”功能。
这个功能通常位于“系统”或“设置”等相关选项中,具体位置可能有所不同,但一般都比较容易找到。
3. 点击“参数备份”功能后,系统会弹出一个对话框,要求用户选择备份的参数类型。
Fanuc机器人的参数种类众多,包括机械参数、运动参数、IO参数等等,根据需要选择相应的参数类型进行备份。
4. 选择完备份的参数类型后,点击“确认”按钮开始备份过程。
备份的时间长度取决于所选择的参数类型的数量和复杂程度,一般来说,备份过程可能需要几分钟到几十分钟不等。
5. 备份完成后,系统会提示用户选择备份文件的存储位置和文件名。
建议将备份文件存储在可靠的设备或云存储中,以防止意外数据丢失。
二、Fanuc参数恢复方法1. 进入Fanuc机器人控制器的菜单界面,找到“参数恢复”功能。
与参数备份类似,参数恢复功能通常也位于“系统”或“设置”等相关选项中。
2. 点击“参数恢复”功能后,系统会弹出一个对话框,要求用户选择要恢复的参数文件。
用户需要选择之前备份过的参数文件,并在对话框中确认。
3. 确认选择后,系统会开始进行参数恢复的过程。
恢复的时间长度与备份的参数数量和复杂程度有关,一般需要几分钟到几十分钟不等。
4. 恢复完成后,系统会提示用户重新启动机器人控制器。
用户需要按照系统的提示进行操作,将机器人控制器重新启动,以使参数恢复生效。
需要注意的是,参数备份和恢复过程中,用户应确保机器人控制器与电源的稳定连接,以免因断电等原因导致备份或恢复失败。
发那科机器人备份和恢复操作
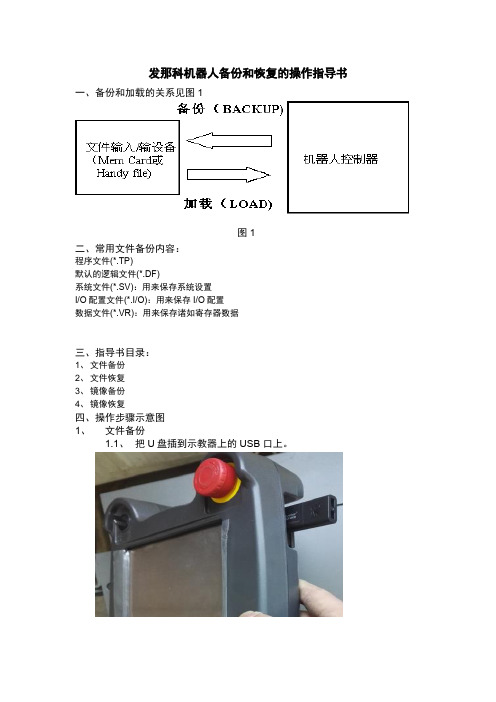
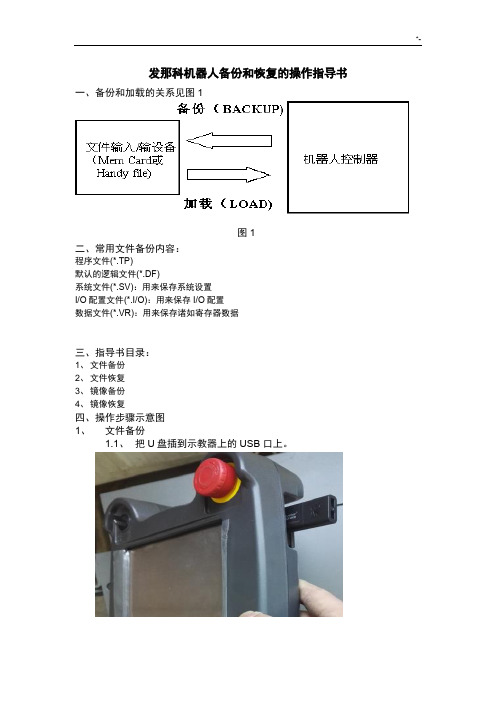
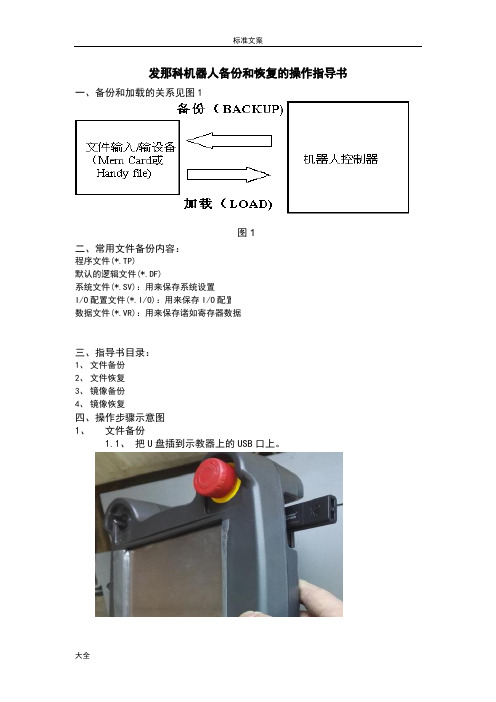
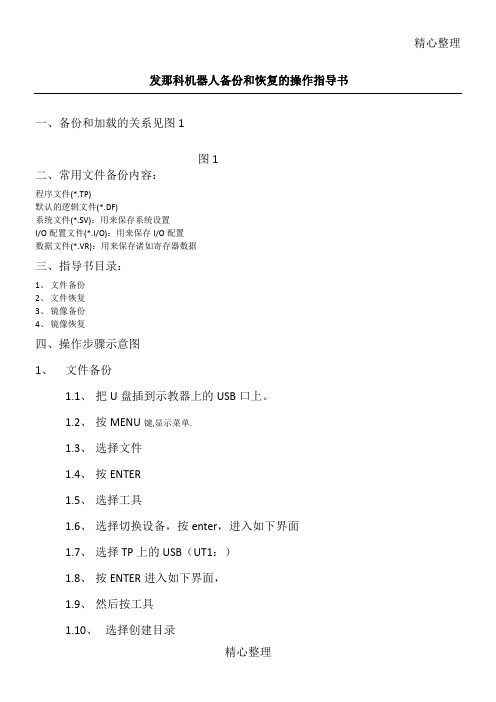
发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1图1二、常用文件备份内容:程序文件(*.TP)默认的逻辑文件(*.DF)系统文件(*.SV):用来保存系统设置I/O配置文件(*.I/O):用来保存I/O配置数据文件(*.VR):用来保存诸如寄存器数据三、指导书目录:1、文件备份2、文件恢复3、镜像备份4、镜像恢复四、操作步骤示意图1、文件备份1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.1.3、选择文件1.4、按ENTER1.5、选择工具1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个“20170331”的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下1.15、选择以上所有,按ENTER1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,1.18、备份完成后,会显示下面1.19、备份就完成了。
2. 加载部分文件或者全部恢复2.1、设备关机2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开2.4、设备开机(不能松开手指)2.5、直到出现CONFIGURATION MENU 菜单,松开手指2.6、系统会停止在如下画面2.7、输入3选择CONTROLLED START,按ENTER.2.8、系统会自动处理2.9、进入CONTROLLED START模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
FANUC参数备份及恢复方法

FANUC 参数备份步骤1.按POWER ON,立即按住右侧两个键不松,直到出现以下画面:
2.
3.插入CF卡
右侧的两个键
4.将光标移到5,按SELECT,
出现以下画面:
按SELECT,按YES,直到完成。
按SELECT,将光标移到END,按SELECT,返回。
将光标移到第4项,进行PMC 的备份。
按SELECT,
用扩展键>,将光标移到16选项上,
按SELECT,按YES
FANUC参数恢复:
按住右侧两个键不松,按POWER ON ,直到出现以下画面:
按SELECT,将光标移到2
按YES
按SELECT,将光标移到END上,按SELECT,将光标移到1上:
按SELECT,将光标移到要恢复的PMC上,按SELECT:
说明:
1.恢复参数前,先备份。
备份后先进入电脑机床文件是否已有再进行参数恢复工作。
2.机床参数分两部分,即SRAM1_0A.FDB及SRAM1_0B.FDB,另外是PMC-SB.000,可分别
备份和恢复。
FANUC ROBOT备份及还原 IMG备份and恢复
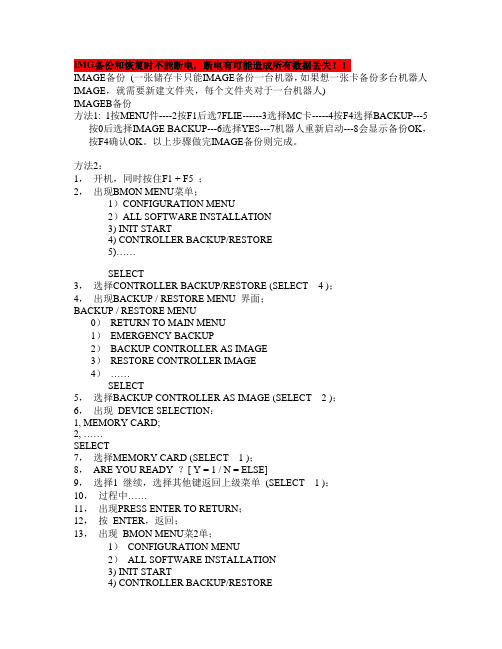
IMG备份和恢复时不能断电,断电有可能造成所有数据丢失!!IMAGE备份(一张储存卡只能IMAGE备份一台机器,如果想一张卡备份多台机器人IMAGE,就需要新建文件夹,每个文件夹对于一台机器人)IMAGEB备份方法1: 1按MENU件----2按F1后选7FLIE------3选择MC卡-----4按F4选择BACKUP---5按0后选择IMAGE BACKUP---6选择YES---7机器人重新启动---8会显示备份OK,按F4确认OK。
以上步骤做完IMAGE备份则完成。
方法2:1,开机,同时按住F1 + F5 ;2,出现BMON MENU菜单;1)CONFIGURATION MENU2)ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5)……SELECT _3,选择CONTROLLER BACKUP/RESTORE (SELECT _ 4 );4,出现BACKUP / RESTORE MENU 界面;BACKUP / RESTORE MENU0)RETURN TO MAIN MENU1)EMERGENCY BACKUP2)BACKUP CONTROLLER AS IMAGE3)RESTORE CONTROLLER IMAGE4)……SELECT _5,选择BACKUP CONTROLLER AS IMAGE (SELECT _ 2 );6,出现DEVICE SELECTION:1, MEMORY CARD;2, ……SELECT _7,选择MEMORY CARD (SELECT _ 1 );8,ARE YOU READY ?[ Y = 1 / N = ELSE]9,选择1 继续,选择其他键返回上级菜单(SELECT _ 1 );10,过程中……11,出现PRESS ENTER TO RETURN;12,按ENTER,返回;13,出现BMON MENU菜2单;1)CONFIGURATION MENU2)ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5)……SELECT _14, 关机;15,开机,可正常使用。
发那可机械手文件备份还原
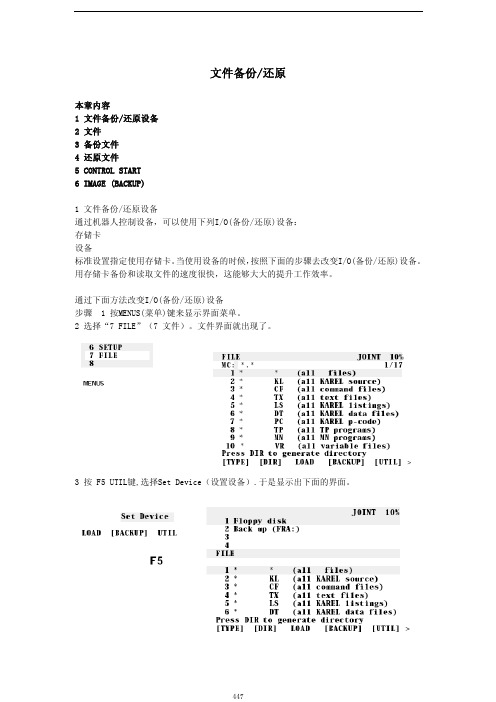
文件备份/还原本章内容1 文件备份/还原设备2 文件3 备份文件4 还原文件5 CONTROL START6 IMAGE (BACKUP)1 文件备份/还原设备通过机器人控制设备,可以使用下列I/O(备份/还原)设备:存储卡设备标准设置指定使用存储卡。
当使用设备的时候,按照下面的步骤去改变I/O(备份/还原)设备。
用存储卡备份和读取文件的速度很快,这能够大大的提升工作效率。
通过下面方法改变I/O(备份/还原)设备步骤 1 按MENUS(菜单)键来显示界面菜单。
2 选择“7 FILE”(7 文件)。
文件界面就出现了。
3 按 F5 UTIL键,选择Set Device(设置设备).于是显示出下面的界面。
4 选择使用的I/O(备份/还原)设备。
当前选择的I/O(备份/还原)设备的缩写会出现在屏幕的左上角。
缩写 I/O(备份/还原)设备MC: 存储卡FLPY:设备FRA:在控制器里用来自动备份F-ROM的区域存储卡可以使用flash ATA存储卡和SRAM存储卡。
图8-1 插入内存卡当使用存储卡时,按照改变I/O(备份/还原)设备的说明来选择存储卡。
2 文件文件是在R--J3iMODEL B控制器的存储器中的一个存储设备。
使用的文件主要有下列类型: 程序文件(*.TP)缺省的逻辑文件(*.DF)系统文件(*.SV) 用于储存系统的设置值。
备份/还原(I/O)配置数据文件(*.IO) 用于储存备份/还原(I/O)配置的设置值。
数据文件(*.VR) 用于储存数据,比如一个寄存器数据。
2.1 程序文件程序文件(*.,MN)包含一系列用于机器人的指令。
这些指令被称为程序指令。
程序指令包括控制机器人操作,外围设备和每个应用。
程序文件被自动的存储在控制器的C-MOS RAM当中。
程序文件的目录被显示在程序选择界面当中(“SELECT”)。
注意提示 程序文件的目录不会被显示在文件界面中。
文件界面使你能够选择存储着所需文件的外部存储器设备,并对这些文件进行操作。
FANUC数控系统数据备份和恢复的使用说明
FANUC数控系统数据备份和恢复的使用说明FANUC数控系统是一种常见的用于控制机床的数控系统,广泛应用于各类加工设备中。
在使用FANUC数控系统过程中,数据的备份和恢复是非常重要的,可以有效地避免因数据丢失而导致工作中断或损坏机床等问题。
本文将介绍如何使用FANUC数控系统进行数据备份和恢复,以及使用存储卡进行数据存储的方法。
一、数据备份1.准备工作在进行数据备份之前,需要准备好一个空的存储卡,并将其插入FANUC数控系统的机箱内的存储卡插槽中。
2.进入备份界面在数控系统的主界面上,选择菜单中的“文件”选项,然后选择“备份/恢复”子菜单。
在弹出的备份/恢复界面中,选择“备份”选项,进入数据备份界面。
3.选择备份项目在数据备份界面中,选择需要备份的项目。
FANUC数控系统可以备份多种数据,包括程序、参数、工具补偿值、拉伸参数等。
根据需求,选择相应的备份项目。
4.进行备份在选择完备份项目后,点击“备份”按钮,系统将开始进行数据备份操作。
备份过程可能需要一定的时间,等待备份完成。
5.完成备份当备份完成后,会出现备份成功的提示信息。
此时,可以将存储卡从机箱中取出,备份过程即可结束。
二、数据恢复1.准备工作在进行数据恢复之前,需要准备好包含备份数据的存储卡,并将其插入FANUC数控系统的机箱内的存储卡插槽中。
2.进入恢复界面在数控系统的主界面上,选择菜单中的“文件”选项,然后选择“备份/恢复”子菜单。
在弹出的备份/恢复界面中,选择“恢复”选项,进入数据恢复界面。
3.选择恢复项目在数据恢复界面中,选择需要恢复的项目。
和备份界面一样,FANUC 数控系统可以恢复多种数据。
根据需求,选择相应的恢复项目。
4.进行恢复在选择完恢复项目后,点击“恢复”按钮,系统将开始进行数据恢复操作。
恢复过程可能需要一定的时间,等待恢复完成。
5.完成恢复当恢复完成后,会出现恢复成功的提示信息。
此时,可以将存储卡从机箱中取出,恢复过程即可结束。
FANUC参数备份及恢复方法
FANUC参数备份及恢复方法备份方法:1.进入FANUC机器人控制面板的参数菜单。
按下"MENU"键,然后选择"PARAMETER"菜单。
2.在参数菜单中,选择"IO"参数,并进入"SYSTEM"子菜单。
该子菜单中包含了机器人系统的一些基本参数。
3.在"SYSTEM"子菜单中,选择"PARAM"子菜单。
这个子菜单中包含了机器人系统的详细参数。
4.在"PARAM"子菜单中,选择"BACKUP"选项。
这将备份机器人的参数到选择的存储设备上。
根据FANUC机器人的不同型号,可以选择备份到U 盘、SD卡、硬盘等存储设备。
5.确认备份完成后,将存储设备从机器人控制面板中取出。
这样就完成了参数的备份过程。
恢复方法:1.将备份参数的存储设备插入到机器人控制面板的相应插槽中。
2.进入FANUC机器人控制面板的参数菜单,选择"IO"参数,然后进入"SYSTEM"子菜单。
3.在"SYSTEM"子菜单中,选择"PARAM"子菜单。
4.在"PARAM"子菜单中,选择"RESTORE"选项。
这将会从存储设备上恢复参数。
5.在恢复过程中,控制面板会显示相关的进度信息。
等待恢复完成。
6.恢复完成后,机器人的参数就已经恢复了。
重新启动机器人,然后测试其运行以确保参数恢复正常。
值得注意的是,在备份和恢复过程中,请务必确保正确选择了存储设备,并遵循FANUC机器人的相关说明和操作手册中的指导。
不正确的操作可能导致参数备份失败或导致机器人无法正常运行。
此外,为了保证参数备份的完整性和可靠性,建议定期定时备份参数,并将备份文件存储在安全的地方。
同时,也推荐在更改机器人参数之前备份当前的参数,以免在更改过程中出现错误导致的问题。
发那科机器人备份和恢复操作技巧
发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1图1二、常用文件备份内容:程序文件(*.TP)默认的逻辑文件(*.DF)系统文件(*.SV):用来保存系统设置I/O配置文件(*.I/O):用来保存I/O配置数据文件(*.VR):用来保存诸如寄存器数据三、指导书目录:1、文件备份2、文件恢复3、镜像备份4、镜像恢复四、操作步骤示意图1、文件备份1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.1.3、选择文件1.4、按ENTER1.5、选择工具1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个“20170331”的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下1.15、选择以上所有,按ENTER1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,1.18、备份完成后,会显示下面1.19、备份就完成了。
2. 加载部分文件或者全部恢复2.1、设备关机2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开2.4、设备开机(不能松开手指)2.5、直到出现CONFIGURATION MENU 菜单,松开手指2.6、系统会停止在如下画面2.7、输入3选择CONTROLLED START,按ENTER.2.8、系统会自动处理2.9、进入CONTROLLED START模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
FANUCROBOT备份及还原IMG备份and恢复

IMG备份和恢复时不能断电,断电有可能造成所有数据丢失!!IMAGE备份(一张储存卡只能IMAGE备份一台机器,如果想一张卡备份多台机器人IMAGE,就需要新建文件夹,每个文件夹对于一台机器人)IMAGEB备份方法1:1按MENU件----2按F1后选7FLIE——3选择MC卡-----4按F4选择BACKUP---5 按0后选择IMAGE BACKUP---6选择YES---7机器人重新启动---8会显示备份0K,按F4确认0K。
以上步骤做完IMAGE备份则完成。
方法2:1,开机,同时按住F1 + F5 ;2,出现BMON MENU菜单;1) CONFIGURATION MENU2) ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5) ……SELECT_3,选择CONTROLLER BACKUP/RESTORE (SELECT _ 4 );4,出现BACKUP / RESTORE MENU 界面;BACKUP / RESTORE MENU0) RETURN TO MAIN MENU1) EMERGENCY BACKUP2) BACKUP CONTROLLER AS IMAGE3) RESTORE CONTROLLER IMAGE4) ……SELECT_5,选择BACKUP CONTROLLER AS IMAGE (SELECT _ 2 );6,出现DEVICE SELECTION :1, MEMORY CARD;2, ……SELECT_7,选择MEMORY CARD (SELECT _ 1 );8,ARE YOU READY ? [ Y = 1 / N = ELSE]9,选择1继续,选择其他键返回上级菜单(SELECT _ 1 );10,过程中……11,出现PRESS ENTER TO RETURN;12,按ENTER,返回;13,出现BMON MENU 菜2单;1) CONFIGURATION MENU2) ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5) ……SELECT_14, 关机;15, 开机,可正常使用IMAGE (恢复前一定首先要有IMG备份)1, 开机,同时按住F1 + F5 ;2, 出现BMON MENU菜单;1) CONFIGURATION MENU2) ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5) ……SELECT_3, 选择CONTROLLER BACKUP/RESTORE (SELECT _ 4 ); 4, 出现BACKUP / RESTORE MENU 界面;0) RETURN TO MAIN MENU1) EMERAENCY BACKUP2) BACKUP CONTROLLER AS IMAGE3) RESTORE CONTROLLER IMAGE4) ……SELECT_5, 选择RESTORE CONTROLLER IMAGE (SELECT _ 3 );6, 出现DEVICE SELECTION :1, MEMORY CARD;2, ……SELECT_7, 选择MEMORY CARD (SELECT _ 1 );8, ARE YOU READY ? [ Y = 1 / N = ELSE]9, 选择1继续,选择其他键返回上级菜单(SELECT _ 1 );10, 过程中……11, 出现PRESS ENTER TO RETURN;12, 按ENTER,返回;13, 出现BMON MENU菜单;1) CONFIGURATION MENU2) ALL SOFTWARE INSTALLATION3) INIT START4) CONTROLLER BACKUP/RESTORE5) ……SELECT14, 关机;15,开机,可正常使用。
发那科机器人备份和恢复操作
发那科机器人备份和恢复操作发那科(DENSO)是一家世界领先的机器人制造商,其机器人备份和恢复操作非常重要。
以下是一个详细的步骤指南,介绍如何备份和恢复发那科机器人。
备份操作:第一步:连接计算机和机器人控制器。
1.将计算机和机器人控制器通过以太网或串行连接线缆连接起来。
2.确保连接线缆连接的牢固,并确保电源正确连接和供电。
第二步:打开发那科机器人控制器的管理软件。
1. 打开发那科机器人控制器的管理软件,通常是WinCAPS III或WinCAPS Plus。
2.通过输入密码登录控制器的用户界面。
第三步:选择备份选项。
1.在用户界面中,点击“备份”选项。
第四步:选择备份的目录和文件。
1.在备份选项中,选择备份的目录,这可以是计算机硬盘或其他存储设备。
2.选择要备份的文件,这些文件包括机器人程序、设置文件和参数文件。
第五步:开始备份。
1.点击“开始备份”按钮,开始备份机器人的文件。
2.等待备份过程完成,通常需要几分钟到几十分钟不等。
恢复操作:第一步:连接计算机和机器人控制器。
1.将计算机和机器人控制器通过以太网或串行连接线缆连接起来。
2.确保连接线缆连接的牢固,并确保电源正确连接和供电。
第二步:打开发那科机器人控制器的管理软件。
1. 打开发那科机器人控制器的管理软件,通常是WinCAPS III或WinCAPS Plus。
2.通过输入密码登录控制器的用户界面。
第三步:选择恢复选项。
1.在用户界面中,点击“恢复”选项。
第四步:选择恢复的目录和文件。
1.在恢复选项中,选择备份文件所在的目录,这可以是计算机硬盘或其他存储设备。
2.选择要恢复的文件,这些文件包括机器人程序、设置文件和参数文件。
第五步:开始恢复。
1.点击“开始恢复”按钮,开始恢复机器人的文件。
2.等待恢复过程完成,通常需要几分钟到几十分钟不等。
总结:发那科机器人备份和恢复操作相对简单,遵循以上步骤即可完成备份和恢复的工作。
备份和恢复操作可以帮助用户在数据丢失或系统崩溃时快速恢复机器人的程序和设置,确保生产任务的连续进行。
发那科机器人备份和恢复操作
发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1二、常用文件备份内容:程序文件(*.TP)默认的逻辑文件(*.DF)系统文件(*.SV):用来保存系统设置I/O配置文件(*.I/O):用来保存I/O配置数据文件(*.VR):用来保存诸如寄存器数据三、指导书目录:1、文件备份2、文件恢复3、镜像备份4、镜像恢复四、操作步骤示意图1、文件备份1.1、把U盘插到示教器上的USB口上。
图11.2、按MENU键,显示菜单.1.3、选择文件1.4、按ENTER1.5、选择工具1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个“20170331”的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下1.15、选择以上所有,按ENTER1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,1.18、备份完成后,会显示下面1.19、备份就完成了。
2.加载部分文件或者全部恢复2.1、设备关机2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开2.4、设备开机(不能松开手指)2.5、直到出现 CONFIGURATION MENU 菜单,松开手指2.6、系统会停止在如下画面2.7、输入3选择 CONTROLLED START,按ENTER.2.8、系统会自动处理2.9、进入CONTROLLED START模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按 ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
发那科机器人备份和恢复的操纵指导书2017年度0410

发那科机器人备份和恢复的操作指导书制作人:穆绪刚一、备份和加载的关系见图1图1二、常用文件备份内容:程序文件(*.TP)默认的逻辑文件(*.DF)系统文件(*.SV):用来保存系统设置I/O配置文件(*.I/O):用来保存I/O配置数据文件(*.VR):用来保存诸如寄存器数据三、指导书目录:1、文件备份2、文件恢复3、镜像备份4、镜像恢复四、操作步骤示意图1、文件备份1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.1.3、选择文件1.4、按ENTER1.5、选择工具1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个“20170331”的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下1.15、选择以上所有,按ENTER1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,1.18、备份完成后,会显示下面1.19、备份就完成了。
2.加载部分文件或者全部恢复2.1、设备关机2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开2.4、设备开机(不能松开手指)2.5、直到出现CONFIGURATION MENU 菜单,松开手指2.6、系统会停止在如下画面2.7、输入3选择CONTROLLED START,按ENTER.2.8、系统会自动处理2.9、进入CONTROLLED START模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
FANUC机器人U盘备份步骤
FANUC机器人U盘备份步骤咱今天就来好好唠唠 FANUC 机器人 U 盘备份这档子事儿。
前阵子,我在工厂里遇到个棘手的情况。
当时有台 FANUC 机器人突然出了点小毛病,运行不太顺畅。
大家都急得像热锅上的蚂蚁,这要是不赶紧处理,生产进度可就耽误啦!我自告奋勇地说我来试试,心里想着,凭借我对 FANUC 机器人的了解,应该能搞定。
首先呢,咱们得准备一个靠谱的 U 盘。
这 U 盘可不能是那种便宜货,质量得过关,不然备份到一半出问题,那可就麻烦大了。
选好 U 盘后,把它插到 FANUC 机器人的控制器上。
接下来,进入机器人的操作界面。
这就好比进入了一个神秘的数字世界,各种参数和选项让人眼花缭乱。
别慌,咱们一步步来。
找到“备份/恢复”这个选项,点击进去。
然后呢,会看到有好多备份的类型可以选择,比如程序备份、系统备份等等。
这时候得根据实际需求来决定啦。
要是想把整个机器人的系统都备份下来,那就选系统备份。
选好备份类型后,系统会提示您选择备份的存储位置,这时候就要选中咱们插进去的那个 U 盘啦。
可别选错了,不然备份到机器人内部存储里,U 盘不就白插了嘛。
确认好存储位置,就可以开始备份啦。
这过程就像把一堆宝贝小心翼翼地装进一个箱子里,得耐心等待。
看着进度条一点点往前走,心里还真有点小紧张呢。
备份完成后,一定要记得安全拔出 U 盘。
就像咱们吃完饭要把碗筷收拾好一样,不能马虎。
再给您说个小细节,有一次我备份的时候,因为太着急,没等备份完成就想拔出U 盘,结果差点导致数据丢失。
从那以后,我就记住了,干啥都得按步骤来,不能心急。
总之,FANUC 机器人 U 盘备份其实并不复杂,只要咱们细心、耐心,按照步骤一步步操作,就能顺利完成备份,为机器人的稳定运行加上一道保险。
您要是碰到类似的情况,别慌,照着这些步骤来,准没错!。
发那科机器人备份和恢复操作
(倂有命會女件)
(所有文本文件)
{所有KMld列衣)
(所育kar卜;I.数療m>(HrtfK \RF:f文竹)
0?F有MN程厅) (所rr变敏文和)t顷4乘統文*1)
|如驻j
_抽掰1
ITRபைடு நூலகம்
发那科机器人备份和恢复的操作指导书
、备份和加载的关系见图1
备份
Handy file)
(
二、常用文件备份容:
程序文件(*.TP)
默认的逻辑文件(*.DF)
系统文件(*.SV):用来保存系统设置
I/O配置文件(*.1/0):用来保存I/O配置 数据文件(*.VR):用来保存诸如寄存器数据
三、指导书目录:
弔
—下英
0001
实序工翼
EU
1BMU
宏用工耳
resTIo
2.Osec
,JMP I BL[ 99]
1衣屮丄且
S—Fb -- —|
■jrw
2试运行
f牛刑掃卄
2文件存越器
U ■*「1 1i
JM . p_■EE■■
bTl:ST10
叶曹;2:外晋■:
WXfr
1
9用户I
3 —忏図
J
1.4、按ENTER
1.5、选择工具
1、 文件备份
2、 文件恢复
3、 镜像备份
4、 镜像恢复
四、操作步骤示意图
1、文件备份
1.1、把U盘插到示教器上的USB口上
1.2、 按MEN!键,显示菜单•
1.3、选择文件
曰回■回隹
亠,—^―,.
A
才壬
o
ifVCia l i hr a * a nr;
发那科机器人备份和恢复的操作指导书2017年04

发那科机器人备份和恢复的操作指导书制作人:穆绪刚一、备份和加载的关系见图1图1二、常用文件备份内容:程序文件(*.TP)默认的逻辑文件(*.DF)系统文件(*.SV):用来保存系统设置I/O配置文件(*.I/O):用来保存I/O配置数据文件(*.VR):用来保存诸如寄存器数据三、指导书目录:1、文件备份2、文件恢复3、镜像备份4、镜像恢复四、操作步骤示意图1、文件备份1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.1.3、选择文件1.4、按ENTER1.5、选择工具1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个“20170331”的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下1.15、选择以上所有,按ENTER1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,1.18、备份完成后,会显示下面1.19、备份就完成了。
2. 加载部分文件或者全部恢复2.1、设备关机2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开2.4、设备开机(不能松开手指)2.5、直到出现CONFIGURATION MENU 菜单,松开手指2.6、系统会停止在如下画面2.7、输入3选择CONTROLLED START,按ENTER.2.8、系统会自动处理2.9、进入CONTROLLED START模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
fanuc机器人数据备份与恢复的操作流程

fanuc机器人数据备份与恢复的操作流程Backing up and restoring data on a Fanuc robot can be a crucial process for ensuring continuity and reliability of operations. 数据备份和恢复对于确保Fanuc机器人的连续性和可靠性非常重要。
Backing up data is essentially creating a copy of all the important information stored on the robot, including program files, system parameters, and other critical data. 数据备份本质上是创建机器人存储的所有重要信息的副本,包括程序文件、系统参数和其他关键数据。
This ensures that in case of any unforeseen circumstances, such as system failure or accidental data loss, the robot can be restored to its previous state without significant disruptions. 这样可以确保在发生任何意外情况,如系统故障或意外数据丢失时,机器人可以在不造成重大中断的情况下恢复到先前的状态。
One of the primary methods of backing up data on a Fanuc robot is through the use of the Fanuc FOCAS library. 在Fanuc机器人上备份数据的主要方法之一是通过使用Fanuc FOCAS库。
This library provides a set of functions specifically designed for accessing, monitoring, and backing up data from Fanuc CNCs, robots, and other devices. 该库提供了一组专门用于访问、监控和备份Fanuc CNC、机器人和其他设备数据的函数。
发那科机器人备份和恢复操作
精心整理发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1I/O1、2、3、4、1、1.6、选择切换设备,按enter,进入如下界面1.7、选择TP上的USB(UT1:)1.8、按ENTER进入如下界面,1.9、然后按工具1.10、选择创建目录1.11、按ENTER,进入如下画面1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹下图是新建了一个的文件夹1.13、输入完成后,按enter1.14、按备份,进入如下2.2.8、系统会自动处理2.9、进入CONTROLLEDSTART模式后,画面如下:2.10、按MENU键,显示菜单,选择文件2.11、按ENTER进入如下:2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择上一层目录进行查找2.13、找到那个以上所有备份的文件夹(如下图是的文件夹)2.14、按enter进入2.15、然后选择需要载入的文件后,按加载。
(如果需要全部载入的话,就直接按恢复)2.16、如果要载入TP程序,可以通过按目录进行分类查找2.17、选择*.TP2.18、按enter,会显示所有的TP程序2.19、选择要加载的程序,按加载,出现如下:2.20、按是出现如下:2.21、按覆盖就是用备份的程序覆盖示教器里的程序,并出现如下:2.22、如果还需加载其他单个程序,步骤相同。
2.23、如果需要批量恢复,按恢复,出现如下:2.24、选择TP程序2.25、按enter,出现如下:2.26、按是2.27、恢复完成后,会出现:3.3.1、前几部与1.1~1.14的步骤完全相同。
3.2、选择镜像备份3.3、按ENTER,进入如下:3.4、选择当前目录(确认这个目录中没有文件,就是说这个文件夹是新建的),然后按enter进入如下:3.5、按确定,系统会自动重启,并开始镜像备份3.6、备份完成后,会出现如下画面:3.7、按确定即可,这样就完成了镜像备份。
发那科机器人备份和恢复的操作指导书20170410
发那科机器人备份和恢复的操作指导书201704101. 操作前准备在进行发那科机器人的备份和恢复操作前,需要准备以下内容:•发那科机器人备份软件;•发那科机器人恢复软件;•发那科机器人备份或恢复所需要的文件;•掌握发那科机器人的基本操作和命令。
2. 发那科机器人备份操作如果需要备份发那科机器人的配置文件和程序代码,在进行备份操作前需要进行以下步骤:1.将外接USB存储设备按照说明书接入机器人的控制箱;2.输入账户密码,进入系统管理界面;3.选择备份和恢复文件,点击进入备份功能菜单;4.选择你需要备份的机器人和备份的存储设备,点击备份按钮;5.等待备份过程完成后,检查备份的文件是否完整。
3. 发那科机器人恢复操作如果需要恢复发那科机器人的配置文件和程序代码,在进行恢复操作前需要进行以下步骤:1.确保USB存储设备中正确备份了需要恢复的文件;2.将外接USB存储设备按照说明书接入机器人的控制箱;3.输入账户密码,进入系统管理界面;4.选择备份和恢复文件,点击进入恢复功能菜单;5.选择你需要恢复的机器人和恢复的存储设备,点击恢复按钮;6.等待恢复过程完成后,检查恢复的文件是否符合预期。
4. 发那科机器人备份和恢复操作注意事项在进行发那科机器人备份和恢复操作时需要注意以下事项:•备份和恢复的文件必须保证完整,否则可能会造成机器人工作异常;•恢复操作将会抹掉原有的配置文件和程序代码,所以在进行恢复操作前需要确认是否需要备份;•备份和恢复操作需要在离线状态下进行,不可在机器人正在工作时进行。
5.发那科机器人备份和恢复操作十分重要,不仅可以保证机器人配置文件和程序代码的完整性,还可以在机器人故障时快速恢复机器人的工作状态。
需要注意的是,在进行备份和恢复操作前需要进行充分的准备和确认,以免造成不必要的损失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发那科机器人备份和恢
复操作
Revised as of 23 November 2020
发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1
图1
二、常用文件备份内容:
程序文件(*.TP)
默认的逻辑文件(*.DF)
系统文件(*.SV):用来保存系统设置
I/O配置文件(*.I/O):用来保存I/O配置
数据文件(*.VR):用来保存诸如寄存器数据
三、指导书目录:
1、文件备份
2、文件恢复
3、镜像备份
4、镜像恢复
四、操作步骤示意图
1、文件备份
1.1、把U盘插到示教器上的USB口上。
1.2、按MENU键,显示菜单.
1.3、选择文件
1.4、按ENTER
1.5、选择工具
1.6、选择切换设备,按enter,进入如下界面
1.7、选择TP上的USB(UT1:)
1.8、按ENTER进入如下界面,
1.9、然后按工具
1.10、选择创建目录
1.11、按ENTER,进入如下画面
1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹
下图是新建了一个“”的文件夹
1.13、输入完成后,按enter
1.14、按备份,进入如下
1.15、选择以上所有,按ENTER
1.16、屏幕会出现2次类似“删除….”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,
1.18、备份完成后,会显示下面
1.19、备份就完成了。
2. 加载部分文件或者全部恢复
2.1、设备关机
2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开
2.4、设备开机(不能松开手指)
2.5、直到出现 CONFIGURATION MENU 菜单,松开手指
2.6、系统会停止在如下画面
2.7、输入3选择 CONTROLLED START,按ENTER.
2.8、系统会自动处理
2.9、进入CONTROLLED START模式后,画面如下:
2.10、按MENU键,显示菜单,选择文件
2.11、按 ENTER进入如下:
2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选
择上一层目录进行查找
2.13、找到那个以上所有备份的文件夹(如下图是的文件夹)
2.14、按enter进入
2.15、然后选择需要载入的文件后,按加载。
(如果需要全部载入的
话,就直接按恢复)
2.16、如果要载入TP程序,可以通过按目录进行分类查找
2.17、选择*.TP
2.18、按enter,会显示所有的TP程序
2.19、选择要加载的程序,按加载,出现如下:
2.20、按是出现如下:
2.21、按覆盖就是用备份的程序覆盖示教器里的程序,并出现如下:
2.22、如果还需加载其他单个程序,步骤相同。
2.23、如果需要批量恢复,按恢复,出现如下:
2.24、选择TP程序
2.25、按enter,出现如下:
2.26、按是
2.27、恢复完成后,会出现:
2.28、这样就把备份中的TP程序全部恢复到示教器中了。
(注:有写
保护的程序和处于编辑的程序不能恢复)
2.29、如果需要将以上所有的备份全部恢复,按恢复,选择以上所有
2.30、按enter
2.31、按是
2.32、完成后,出现如下:
2.33、这样就将以上所有的备份全部恢复到示教器中了。
但是此时需要
退出控制启动模式,才可以使用机器人。
2.34、按FCTN
2.35、按完后出现如下,选择1冷开机:
2.36、按enter
2.37、系统会自动重启,这样就完成了。
可以手动或自动操作了。
3. 镜像备份
3.1、前几部与~的步骤完全相同。
3.2、选择镜像备份
3.3、按ENTER,进入如下:
3.4、选择当前目录(确认这个目录中没有文件,就是说这个文件夹是
新建的),然后按enter进入如下:
3.5、按确定,系统会自动重启,并开始镜像备份
3.6、备份完成后,会出现如下画面:
3.7、按确定即可,这样就完成了镜像备份。
4. 镜像恢复
4.1、设备关机
4.2、同时按住F1+F5,不能松开
4.3、设备开机(不能松开手指)
4.4、直到出现BMON MENU菜单,才可以松开手指
4.5、输入4选择CONTROLLED BACKUP/RESTORE
4.6、按ENTER,进入BACKUP/RESTORE MENU界面
4.7、输入3选择 RESTORE CONTROLLER IMAGE,
4.8、按enter
4.9、输入4
4.10、按enter
4.11、选择镜像备份的文件夹,此例是img的文件夹。
输入3
4.12、按enter
4.13、输入1
4.14、按ENTER,系统显示:ARE YOU READY?
4.15、
4.16、输入1,
4.17、按ENTER,出现如下:
4.18、系统加载完毕,显示 PRESS ENTER TO RETURN
4.19、按ENTER,进入BMON MENU菜单界面
4.20、输入1
4.21、按enter
4.22、输入2
4.23、按enter,系统会自动进行冷启动。
这样镜像恢复就完成了。