最小二乘接收机位置计算
最小二乘法计算节点位置

最小二乘法计算节点位置
最小二乘法是一种数学优化技术,它通过最小化误差的平方和来找到最佳函数匹配。
在计算节点位置方面,最小二乘法定位算法通过将误差的平方和最小化来求得待定位节点位置的最佳估计值。
具体来说,最小二乘法定位算法的基本原理是:已知n个信标节点的坐标,信标节点向待定位节点发送数据包,待定位节点测量来自信标节点数据包的信号强度。
根据信号传播模型,可以将这一系列的信号强度值(RSSI值)转换为相应的距离。
然后,联立待定位节点坐标(x,y)、信标节点坐标(xi,yi)、两者之间的距离di,可以建立以下方程组:
1. 第一个方程减去第二个方程
2. 第二个方程减去第三个方程
...
n-1. 第n-1个方程减去第n个方程
通过这种方式,可以消去方程组中的未知参数x2+y2,得到以下方程组:
Ax=b
其中,A是一个矩阵,x是待定位节点的坐标(x,y),b是一个向量。
由于在
n个方程中,待定位节点坐标X不会符合方程组AX=B中的所有方程,因此设置误差向量为ε=AX−B,取误差向量中误差的平方和,则有E=εTε。
若要误差最小,即使得E最小。
从而将上式对X求导,令导数为0,其表达式为:
解方程(8)可以得到:
X=(ATA)−1ATb
由于X是关于待定位节点坐标的矩阵形式,因此可以获得待定位节点的估计坐标。
需要注意的是,如果待定位节点以及信标节点的坐标都是三维形式(x,y,z)、(xi,yi,zi),则需要将上述方程组稍加修改,改为关于x,y,z的矩阵形式即可。
北斗接收机位置解算算法及验证

0 引 言
1 利用广播星历解算卫星位置
的研制工作.虽然不同的应用环境,对北斗接收机 GPS略有不 同. 其 中IGSO、MEO 卫 星 计 算 方 法
要求的侧重点不同,但接收机位置解算都是必须考 相同,GEO 卫星因其轨道倾角和偏心率均很小,需
虑的部分.本文对北斗接收机的位置解算过程进 采用坐标系旋转的方法增大轨道倾角以提高卫星
行分 析 研 究,并 结 合 MATLAB 软 件,分 别 使 用 北
广,在农业、交通及 航 空 等 各 个 行 业 中 发 挥 着 越 来 轨道卫星,即地球同步轨道 (GEO)、倾斜地球同步
越 重 要 的 作 用 . 因 此 ,对 北 斗 接 收 机 的 需 求 也 越 来 越 大 ,各 导 航 设 备 研 制 单 位 竞 相 展 开 了 北 斗 接 收 机
轨 道 (InclinedIGSO)和 中 地 球 轨 道 (MEO)组 成 的 混合星 座[1],因 此,北 斗 卫 星 位 置 的 解 算 方 法 与
定义
升交点赤经变化率 参考时间的轨道倾角
轨道倾角变化率 纬 度 幅 角 的 余 弦/正 弦 调 和 改 正 项 的 振 幅 轨 道 半 径 的 余 弦/正 弦 调 和 改 正 项 的 振 幅 轨 道 倾 角 的 余 弦/正 弦 调 和 改 正 项 的 振 幅
收 稿 日 期 :2018G05G17 资 助 项 目 :国 家 重 点 研 发 计 划 课 题 (批 准 号 :2016YFB0502402) 通信作者:丁其金 EGmail:1342859850@qq.com
基于训练的最小二乘(LS)算法的信道估计

基于训练的最小二乘(LS )算法的信道估计一、概述与背景随着近年来无线通信系统的高速发展,基于阵列的接收机和空时分集方法逐渐成为研究热点。
现在无论是在理论分析还是在富散射环境的实地测试中,MIMO (multiple-input multiple-output)系统都能够大幅度提高无线通信系统的容量。
设一个t 发射天线、r 接收天线的MIMO 系统,其接收信号可表示为:ii i v Hp s +=(1)H 表示随机信道复矩阵,i p 表示t×1发送信号复向量,i v 表示零均值白噪声复向量。
为了估计信道矩阵H ,假设发送的训练信号为Np p ,…,1,其中t N ≥.其对应的r×N 接收信号矩阵][,1N s s S ,…=可表示为:VHP S +=(2)其中][,1N p p P ,…=表示t×N 训练矩阵,][,1N v v V ,…=表示r×N 噪声矩阵。
而MIMO 技术的要点在于得到一个精确的信道状态信息(CSI)。
而信道估计算法的任务是基于S 和P 的信息来恢复信道矩阵H 的信息.信道估计有非盲信道估计方法、盲信道估计方法和半盲信道方法。
目前使用最为广泛的MIMO 信道估计方法是非盲信道估计方法,也即使用导频信号(又称为训练序列)然后基于接收数据和训练序列的信息来实现信道估计。
盲信道估计实质上是利用信道潜在的结构特征或者是输入信号的特征达到信道估计的目的。
而半盲信道方法估计是上述两种信道估计方法的综合与平衡。
本文主要讲的是最小二乘算法的信道估计,并用matlab 对LS 算法进行仿真,仿真内容是ZF 下理想信道与LS 估计信道的性能比较和LS 估计信道的不同天线数MIMO 系统的性能比较。
二、最小二乘(LS)信道估计算法由上述可知,已知P 和接收信号的信息,则信道矩阵的恢复可以使用最小二乘(LS )算法来进行估计,表示为:∗=SP H LSˆ(3)其中1)(−∗=H H PP P P 是表示P 的伪逆矩阵,H)(⋅表示H 变换。
最小二乘的求解及简化剖析
1
wr11n 1
0
0
x1n
wr12 n 1
wr22 n 1
0
x2 n
wr1M n 1 wr2M n 1
wrMM n 1 xM n
wr1d wr2d
n n
1 1
wrMd n 1
dn
用于时间递推最小二乘估计的Givens算法
可以利用一系列M个Givens旋转,来消除矩阵 Rn
个行矢量
矢量除以其长度,得到一个标准正交矢量组
qˆi ,i 1,2,, k
其中
qˆi
qi qiH qi
3.1 Gram-Schmidt正交化
在对数据矩阵A的分解时,可以证明:
a1 a2 aM q1 q2 qM R~M
其中
1 ~r12 ~r1M
R~M
0
1
~r2M
0 0
1
3.2 Givens旋转
通过对信号矢量XM l的一个线性加权组合可以 得到对理想信号d l 的一个估值。所以,
d l, n XTM lhM n,
0l n
定义误差为
el, n dl d l, n,
0ln
1、最小二乘估计的矩阵形式
最小二乘估计问题可以表述为,给定一组观测矢
量组 XM l,l 0,1,n 确定出系数矢量 hM n,使加权
趣的两行,Givens 旋转在这些行上的操作表示为
ci si
si ci
0 0
0 0
wrii n 1 xiin
wri,i1 n 1
xii1 n
0 0
0 0
rii n
0
ri,i1 n xii11 n
riM n xMi1 n
自动监测接收机相关解题法

自动监测接收机相关解题法自动监测接收机相关解题法包括伪距残差判决法、伪距比较法等。
(一)伪距残差判决法:在定位方程解算中,利用定位方程组进行解算。
(二)伪距比较法:直接利用伪距来判决。
在观测数量大于4的情况下,对n个观测量进行分组,一组为4个,另一组为n-4个。
对4个的那一组进行最小二乘法解算出接收机位置。
对n-4个的那一组计算卫星位置。
根据解算出的接收机位置和卫星位置估算伪距。
将估算的伪距与实际观测的伪距进行比较。
若比较结果都很接近,说明观测结果没问题,第2步中解算的位置也没问题。
否则说明有问题。
对有问题的情况进行处理。
(三)数据筛选法:在处理自动监测接收机数据时,通常会使用数据筛选法来剔除不良数据或错误数据,以保证解算结果的准确性。
该方法包括对观测数据进行检查、筛选和修正等步骤。
(四)滤波算法:自动监测接收机通常会采用滤波算法来减小观测数据中的噪声和干扰,以提高定位精度和稳定性。
常用的滤波算法包括卡尔曼滤波、最小二乘滤波等。
(五)模型验证法:在解算自动监测接收机位置时,需要对所使用的模型进行验证和确认。
这可以通过对已知数据进行测试、比较和评估等方式来完成。
(六)多路径效应修正法:在复杂环境中,自动监测接收机可能会受到多路径效应的影响,导致定位误差。
为了减小这种误差,可以采用多路径效应修正法,通过对观测数据进行建模和分析,消除多路径效应对定位结果的影响。
(七)差分技术:通过将自动监测接收机的观测数据与参考站或其他用户的观测数据进行比较,可以消除公共误差源,从而提高定位精度。
差分技术包括实时差分定位和后处理差分等。
这些方法可以根据具体情况选择使用,并结合实际观测数据进行综合分析和处理,以获得准确、可靠的自动监测接收机解算结果。
2 最小二乘残差法 raim 算法原理

2 最小二乘残差法 raim 算法原理最小二乘残差法(Least Squares Residual Method)是一种常用的线性回归分析方法。
它的主要思想是通过寻找最小化数据点与拟合直线之间距离平方和的方法来确定最佳拟合直线的系数。
在实际应用中,该方法被广泛应用于数据分析、信号处理、机器学习等领域。
一、基本原理1.1 模型假设在进行最小二乘残差法分析时,我们通常假设数据点服从一个线性模型,即:y = β0 + β1x1 + β2x2 + … + βnxn + ε其中,y表示因变量,x1, x2, …, xn表示自变量,β0, β1, …, βn表示系数,ε表示误差项。
我们希望通过最小化误差项的平方和来确定系数。
1.2 求解过程对于给定的数据点集合{(xi,yi)}i=1,n,我们需要求解出系数β0, β1, …,βn使得误差项ε的平方和最小。
具体地说,我们需要构造一个目标函数J(β)来描述误差项ε与系数β之间的关系,并通过求解该目标函数的极值来得到最佳拟合直线的系数。
目标函数J(β)的定义如下:J(β) = Σ(yi - β0 - β1xi1 - β2xi2 - … - βn xin)^2其中,Σ表示对所有数据点求和。
我们需要通过对目标函数J(β)进行求导来得到其极值点。
为了简化计算,我们可以将目标函数J(β)写成矩阵形式:J(β) = (Y - Xβ)^T(Y - Xβ)其中,Y是n维列向量,表示所有数据点的因变量;X是n×(k+1)维矩阵,表示所有数据点的自变量及其系数;β是(k+1)维列向量,表示所有系数。
将目标函数J(β)对系数β求导并令其等于0,得到如下方程组:X^T(Xβ - Y) = 0该方程组可以通过矩阵运算来求解。
具体地说,我们可以先计算出X^TX和X^TY两个矩阵,并用它们来解出系数向量β。
二、RAIM算法原理RAIM(Receiver Autonomous Integrity Monitoring)算法是一种用于GPS接收机自主监测其位置解算的方法。
7最小二乘定位算解析

最小二乘定位算法
单星定位的局限性: 低动态用户(时序测量定位) 不能完成连续定位 定位精度不高(低轨受地球影响大) 双星定位的局限性: 有源定位,定位滞后误差大,不适应高动态定位 在低纬度地区几何误差因子大,定位精度不高 三星定位的局限性: 无源定位需要其他设备的支持 低纬度地区几何误差因子大,定位精度差
卫星导航理论
单星定位原理示意图
卫
星 ti
ti+T
S ri ri+
1
接 收 t 机 i i
ti T i 1
原理: fs dt
ti
ti T
ti T i 1
ti i
( f s f d )dt
定位方程: ri ri1 i i1 f d dt , i 1 ~ 4 s ti i
ri* ( yu yu 0 ) zu P0
( zu zu 0 ) ctu ctsi ni
P0
ˆi 0 r
xu 0 xsi y y z z ( xu xu 0 ) u 0 si ( yu yu 0 ) u 0 si ( zu zu 0 ) ctu ctsi ni ˆi 0 ˆi 0 ˆi 0 r r r
5
5.5
6
迭代最小二乘运算结果(时空位置曲线) 卫星导航理论
卫星导航理论
卫星时间的归化
归化的意义: 将各个卫星位置反推到定位时刻所对应 的发射时刻位置
卫星导航理论
时间误差带来的位置外推误差
卫星速度: V=ω(6370+20200)*1000=3864m/s 若传播时延测量误差为3m,卫星位 置外推误差3*3864/c,可以忽略
全球卫星导航系统信号传输误差模型建立计算
全球卫星导航系统信号传输误差模型建立计算引言:随着全球卫星导航系统(GNSS)的广泛应用,信号传输误差成为影响导航精度的关键因素之一。
因此,建立适用的信号传输误差模型并进行精确计算具有重要意义。
本文将介绍全球卫星导航系统信号传输误差模型的建立和计算方法。
一、全球卫星导航系统信号传输误差的来源全球卫星导航系统信号传输误差包括多径效应、大气延迟、钟差、电离层延迟等。
这些误差源对信号传输造成衰减、延迟、非对称等影响,进而影响到定位和导航的准确性。
1. 多径效应多径效应是指导航接收机接收到多个路径上反射的信号,造成接收信号中出现多个相位,从而导致定位误差增加。
多径效应的产生与导航信号与地面建筑物、地形、水体等障碍物的反射有关。
2. 大气延迟大气延迟是由于卫星信号在穿越大气层时,受到大气介质的折射和散射而产生的延迟效应。
大气延迟的大小与卫星信号通过的大气条件、卫星高度角、方向等相关。
3. 钟差钟差是指卫星上的原子钟与地面接收机自带的原子钟之间的时间差异。
由于钟差会直接影响到导航信号的时间标定,因此它被认为是一种主要的误差源。
4. 电离层延迟电离层延迟是指卫星信号在穿越电离层时受到电离层中电子密度分布的影响,从而引起的相位和频率的变化。
电离层延迟的强度和分布受季节、太阳活动等多种因素影响。
二、全球卫星导航系统信号传输误差模型的建立为了更准确地描述全球卫星导航系统信号传输误差,研究者们通常建立各种数学模型来表示不同类型的误差源。
1. 多径效应模型多径效应模型可以通过统计分析和实测数据拟合得到。
其中代表性的模型包括理论模型和经验模型。
理论模型基于射线追踪原理,考虑了导航信号与地面障碍物间反射的物理原理;经验模型基于实际测量数据,通过拟合曲线得到多径误差的统计性质,具有较高的适用性。
2. 大气延迟模型大气延迟模型通常使用对流层模型和电离层模型进行描述。
对流层模型通常采用延迟改正系数和站间同步观测数据进行计算;电离层模型则利用国际电离层图斜晕(IGS TEC)数据,通过插值和拟合方法计算电离层延迟。
rtk浮点解 最小二乘法
rtk浮点解最小二乘法
RTK(实时动态差分定位)技术是现代测量技术中的一种高精度定位方法,广泛应用于测绘、无人驾驶、无人机等领域。
在RTK技术中,浮点解是一种关键的计算过程,而最小二乘法则是实现浮点解的重要手段。
浮点解是RTK定位中的一个重要步骤,它通过对接收到的卫星信号进行数据处理,计算出接收机的位置信息。
在这个过程中,最小二乘法作为一种数学优化技术,被广泛应用于处理观测数据中的误差和噪声。
最小二乘法的基本原理是通过最小化观测值与理论值之间的残差平方和,来求解最优的参数估计值。
在RTK浮点解中,最小二乘法可以帮助我们找到最符合观测数据的接收机位置参数。
通过构建观测方程,利用最小二乘法求解这些方程,我们可以得到接收机位置的浮点解。
RTK浮点解中采用最小二乘法的原因在于,最小二乘法具有优良的统计性质和计算稳定性。
它能够充分利用所有观测数据,通过数学优化手段,得到最优的位置参数估计值。
同时,最小二乘法还能够有效地处理观测数据中的误差和噪声,提高定位精度和稳定性。
总之,RTK浮点解中采用最小二乘法是一种有效的数据处理方法,它能够提高RTK 定位的精度和稳定性。
随着技术的不断发展,最小二乘法在RTK技术中的应用将会越来越广泛,为现代测量技术的发展提供有力支持。
rtklib伪距单点定位最小二乘法

RTKLIB是一种用于实时定位和测量的开源软件,它支持全球导航卫星系统(GNSS),包括GPS、GLONASS、Galileo和北斗。
在RTKLIB 中,伪距单点定位是一种常用的定位方法,它通过测量接收机和卫星之间的伪距距离来实现定位。
在伪距单点定位中,最小二乘法是一种常用的数学模型,它通过最小化测量值与估计值之间的误差平方和,来估计未知参数。
在RTKLIB中,最小二乘法被广泛应用于伪距单点定位中,通过对接收机和卫星之间的伪距距离进行最小二乘估计,来实现定位。
伪距单点定位最小二乘法的算法主要包括以下步骤:1. 数据采集:需要在接收机上采集卫星信号的伪距数据。
2. 估计参数:利用最小二乘法对接收机位置和钟差等参数进行估计。
3. 残差计算:计算估计值与测量值之间的残差,即观测值与估计值之间的差值。
4. 参数调整:根据残差的大小,调整参数的估计值,使残差最小化。
5. 定位结果:通过调整后的参数估计值,得到接收机的定位结果。
伪距单点定位最小二乘法在实际应用中具有一定的优势和局限性。
优势在于算法简单易懂,计算速度较快,适用于单点定位的室外环境。
然而,由于伪距单点定位依赖于接收机与卫星之间的伪距距离,容易受到环境遮挡、多径效应等因素的影响,精度较低,定位误差较大。
在实际应用中,为了提高伪距单点定位最小二乘法的精度和稳定性,可以结合多频观测、多站观测、差分定位等技术,以及对环境遮挡的优化和多径效应的抑制,来改善定位精度。
另外,还可以考虑使用RTK(实时运动定位)技术,通过基站进行差分改正,进一步提高定位精度和可靠性。
伪距单点定位最小二乘法作为RTKLIB定位的一种常用方法,在实际应用中需要结合多种技术和方法,以提高定位精度和可靠性。
通过不断的优化和改进,可以更好地适应各种复杂的定位环接下来,让我们深入探讨一下伪距单点定位最小二乘法在RTKLIB中的具体应用。
我们来详细了解一下伪距单点定位的原理和基本步骤。
1. 伪距单点定位原理伪距单点定位是一种基于GNSS测量解算的定位方法,它通过测量接收机和卫星之间的伪距距离来确定接收机的位置。
第2讲 最小二乘配置

1、Introduction(the question)
2、Filtering and Prediction
3、Least Squares Collocation
4、Some Applications
第二讲 最小二乘配置(LS Collocation)
第二讲 最小二乘配置(LS Collocation)
四、应用 5.地壳形变应用(Crustal Deformation)
一般采用高斯型函数,即在一定距离上相关,超出一定 距离不相关
f (s) exp(K 2 S 2 )
最新的研究成果K取0.0016
第二讲 最小二乘配置(LS Collocation)
第二讲 最小二乘配置(LS Collocation)
四、应用 5.地壳形变应用(Crustal Deformation)
(2)如果把形变整体看成是随机量,即是滤波推估模型
L Y
ˆ 1L S S L
ˆ 1L S SS L
协方差函数确定:严密的应变分布协方差函数无法确定,解决的办法是确 定经验协方差函数。给出已算点的协方差分布图形,然 后选择适当的函数式,用最小二乘拟和
2K T A 0 ˆ X
解得
ˆ ( AT P A) 1 AT P L X L L
ˆ P 1 BT P ( L AX ˆ) Y Y L
分解得
ˆ 1 ( L AX ˆ) S S L
ˆ 1 (L AX ˆ) S SS L
ˆ) V P1 PL (L AX
ˆ 1 L 滤波解— S S L
推估解—
ˆ 1 L S SS L
slam 最小二乘法
slam 最小二乘法
slam最小二乘法是指在
SLAM(SimultaneousLocalizationandMapping,即同时定位与建图) 中,利用最小二乘法对机器人轨迹和地图进行优化的方法。
在 SLAM 中,机器人需要同时完成自身的位置定位和地图的构建,因此需要处理一个双重未知问题。
而最小二乘法则是一种常用的优化方法,可以通过最小化误差来不断优化机器人的轨迹和地图。
具体来说,slam 最小二乘法的流程如下:首先,根据机器人的
传感器数据(如激光雷达、相机等),我们可以得到一系列的测量值。
然后,我们可以根据这些测量值,推算出机器人的位置以及地图中物体的位置。
接下来,我们将这些位置信息作为变量,构建一个误差函数,该函数表示机器人和物体位置的测量值与预测值之间的差异。
最后,我们使用最小二乘法对误差函数进行优化,不断更新机器人的轨迹和地图,以逐步接近真实值。
在实际应用中,slam 最小二乘法还有许多细节需要处理,例如
如何选择误差函数、如何处理不确定性等等。
但总的来说,这一方法已经成为了 SLAM 中不可或缺的一部分,为机器人的自主导航和环境感知提供了强有力的支持。
- 1 -。
采用距离无偏估计的加权最小二乘定位算法

a we i g h t e d l e st a s q u a r e l o c a l i z a i t o n a l g o i r t h m b a s e d o n t h e u n b i se a d e s i t ma t e o f t h e d i s t nc a e i s p r o p o s e d .I n he t p r o p o s e d lg a o it r h m ,f i r s t l y t h e u n b i se a d e s t i ma t e o f t h e d i s t a n c e b e t w e e n t h e t rg a e t a n d t h e s e n s o r s we r e c lc a u l a t e d a c c o r d i n g t o t h e r e c e i v e d s i g n l a s t r e n th g o b s e r v a t i o n mo d e 1 .T h e n l i n e r a e q u a t i o n s w e e r e s t a b l i s h e d b a s e d o n t h e d i s t a n c e c a l c u l a t i o n f o m u r — l a .Af t e r t h a t ,t h e u n b i a s e d e s t i ma t e o f t h e d i s t a n c e wa s s u b s t i t u t e d i n t o l i n e r a e q u a t i o n s t o e s t a b l i s h t h e l i n e r a l e a s t s q u a r e s mo d e l o n t h e s o u r c e p o s i t i o n,s i mu l t ne a o u s l y c a l c u l a t e d t h e n o i s e c o v a r i a n c e ma t r i x o f t h e l i n e a r l e a s t s q u re a s mo d e .F i n l— a l y t h e e s t i ma t i o n o f t h e s i g n l a s o u r c e p o s i t i o n wa s o b t a i n e d b y we i g h t e d l i n e r a l e a s t s q u re a me t h o d .I n t h e p a p e r , f u l l c o m— p u t e r s i mu l a t i o n s h a d b e e n d o n e .S i mu l a t i o n s r e s u l t s s h o w t h a t t h e p o s i t i o n i n g p e f r o ma r n c e o f t h e p r o p o s e d lg a o i r t h m i s b e t — t e r t h a n b o t h t r a d i t i o n a l w e i g h t e d l e a s t s q u re a s lg a o i r h m t nd a b e s t l i n e a r u n b i a s e d e s t i ma t i o n lg a o it r h m u n d e r d i f f e r e n t p o s i —
线性最小二乘法的RSSI定位精确计算方法

线性最小二乘法的RSSI定位精确计算方法*袁鑫1,吴晓平1,2*,王国英1,2【摘要】基于接收信号强度指示(RSSI)定位模型,提出了一种目标节点位置的精确计算方法。
将RSSI定位问题所描述的非线性优化函数转化为线性最小二乘法估计问题,将定位结果直接用代数解表示。
分别提出了目标节点信号发射强度已知和未知下的非约束线性最小二乘(ULLS)定位方法。
同时对非约束线性最小二乘法下的参数进一步优化,提出了约束线性最小二乘法以提高定位精度。
仿真验证了该定位计算方法的有效性,测试了不同信号强度噪声对定位误差的影响。
结果同时表明,约束线性最小二乘法比非约束线性最小二乘法的定位误差更小,非常接近于定位结果的克拉美罗下界值(CRLB)。
【期刊名称】传感技术学报【年(卷),期】2014(000)010【总页数】6【关键词】无线传感器网络;定位;无线信号强度;线性最小二乘法无线传感器网络(WSNs)是通过将大量具有传感器单元、数据处理单元及通信模块的微小智能节点密集地散布在感知区域,节点间以自组织方式构成的无线通信网络。
无线传感器网络能够实时监测、感知和采集网络分布区域内的各种环境或监测对象的信息,并对这些信息进行处理,从而为远程用户提供详尽而准确的信息[1]。
采用无线传感器网络进行信息收集和处理,这些数据必须和位置信息相结合才有意义,甚至有时需要传感器节点发回单纯的位置信息[2-4]。
无线传感器网络以其廉价的无线通信组网而区别于其他无线通讯技术。
从应用角度来讲,节点定位是无线传感器网络中最为重要和传统的问题,研究具有低成本、高精度的无线传感器网络定位系统是该领域的主要问题之一。
传统的测距定位方法,如到达时间(TOA)[5-6]、到达时间差(TDOA)[7]、到达角度(AOA)[8]等能获取较高的定位精度,但需要额外的测距硬件设施,增加了定位成本,且节点间的测距易受环境、节点硬件、网络攻击等各种因素的干扰。
以节点的连通性、网络拓扑为基础的非测距定位方法[9]亦能定位节点坐标,但定位精度不高,限制了其使用范围。
最小二乘算法
为最小,这种得到的拟合函数 ( x) 的方法,通常称为最小二乘法。多项式最小二乘法拟合 的 基 本 原 理 , 设 函 数 j ( x) x ( j 0,1,……, n) , 已 知 列 表 函 数
j
yi f ( xi ),(i 0,1,……, m) ,且 n m 。用多项式 pn ( x) 0 1 x ……+ n xn 逼近
最小二乘法在 RSSI 定位中的应用
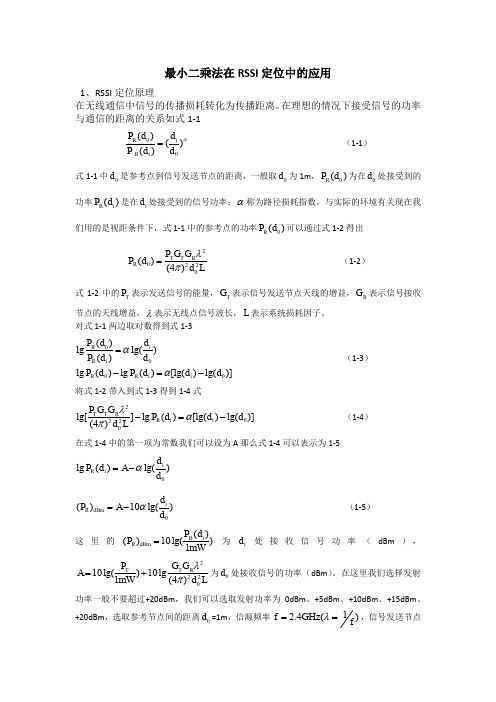
1、RSSI 定位原理 在无线通信中信号的传播损耗转化为传播距离。 在理想的情况下接受信号的功率 与通信的距离的关系如式 1-1
PR (d0 ) d ( i ) P R (di ) d 0
(1-1)
式 1-1 中 d 0 是参考点到信号发送节点的距离,一般取 d 0 为 1m, PR (d0 ) 为在 d 0 处接受到的 功率 PR (di ) 是在 d i 处接受到的信号功率; 称为路径损耗指数,与实际的环境有关现在我 们用的是视距条件下,式 1-1 中的参考点的功率 PR (d0 ) 可以通过式 1-2 得出
A ( PR )dBm 10
这里我们设 d 0 =1m 那么我们得到的 d i 为 di 10
A ( PR )dBm 10
2、最小二乘算法原理
定 义 : 设 有 函 数
1 ( x), 2 ( x),……n ( x)
线
性
无
关
,
span{1 ( x), 2 ( x), 3 ( x),……,n ( x)} ,
40
60
图一、不同的衰落系数的仿真 通过分析误差我们可以得到如图二的累计分布函数,在分布函数中我们看到误差在 1.28 米 处的概率分布是 50%,1.32 米一下的误差概率为 90%。
最小二乘算法 公式 gnss

最小二乘算法公式 gnssGNSS(全球导航卫星系统)是指由多颗卫星组成的系统,可提供全球范围内的位置、速度和时间等信息。
在GNSS中,最小二乘算法是一种常用的数据处理方法,用于提高定位精度和减小误差。
最小二乘算法是一种基于最小化残差平方和的优化方法。
在GNSS 定位中,残差是指观测值与预测值之间的差异。
最小二乘算法的目标是通过调整参数的估计值,使得残差平方和最小化。
GNSS定位过程中,需要收集卫星信号,并通过接收机进行信号处理和定位计算。
在信号处理阶段,接收机会对接收到的信号进行解调和解码,获取伪距观测值。
伪距观测值是卫星信号的传播时间与接收机的时钟偏差之间的差值。
最小二乘算法可以应用于GNSS中的多个环节,包括卫星轨道估计、接收机时钟校准、接收机位置估计等。
在卫星轨道估计中,最小二乘算法可以通过拟合观测值和预测值之间的残差,来估计卫星的轨道参数,从而提高定位的精度。
在接收机时钟校准中,最小二乘算法可以通过拟合接收机的观测值和预测值之间的残差,来校准接收机的时钟偏差,从而减小定位误差。
在接收机位置估计中,最小二乘算法可以通过拟合多个卫星的伪距观测值和接收机的位置预测值之间的残差,来估计接收机的位置坐标。
最小二乘算法的优点是简单易懂、计算效率高。
它可以通过求解线性方程组的正规方程或利用矩阵的特征值和特征向量来实现。
在实际应用中,最小二乘算法可以通过迭代求解的方式,逐步调整参数的估计值,以达到最小化残差平方和的目标。
然而,最小二乘算法也存在一些局限性。
首先,它假设观测误差是独立同分布的,且服从正态分布。
如果观测误差不满足这些假设,最小二乘算法的结果可能会偏离真实值。
其次,最小二乘算法对异常值敏感,即一个极端的观测值可能会对结果产生较大影响。
因此,在应用最小二乘算法时,需要对数据进行预处理,剔除异常值或采用鲁棒估计方法。
最小二乘算法是GNSS定位中常用的数据处理方法,通过最小化残差平方和来提高定位精度和减小误差。
定位二乘法
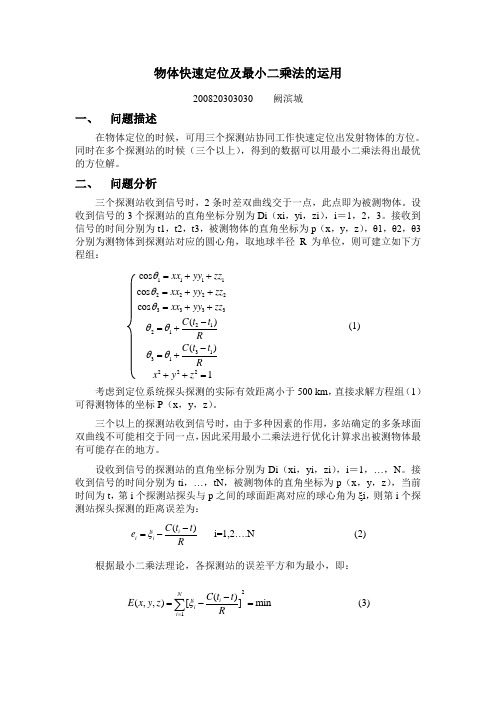
物体快速定位及最小二乘法的运用200820303030 阙滨城一、 问题描述在物体定位的时候,可用三个探测站协同工作快速定位出发射物体的方位。
同时在多个探测站的时候(三个以上),得到的数据可以用最小二乘法得出最优的方位解。
二、 问题分析三个探测站收到信号时,2条时差双曲线交于一点,此点即为被测物体。
设收到信号的3个探测站的直角坐标分别为Di (xi ,yi ,zi ),i =1,2,3。
接收到信号的时间分别为t1,t2,t3,被测物体的直角坐标为p (x ,y ,z ),θ1,θ2,θ3分别为测物体到探测站对应的圆心角,取地球半径R 为单位,则可建立如下方程组:11112222333321213131222cos cos cos ()()1xx yy zz xx yy zz xx yy zz C t t R C t t Rx y z θθθθθθθ=++=++=++-=+-=+++= (1)考虑到定位系统探头探测的实际有效距离小于500 km ,直接求解方程组(1)可得测物体的坐标P (x ,y ,z )。
三个以上的探测站收到信号时,由于多种因素的作用,多站确定的多条球面双曲线不可能相交于同一点,因此采用最小二乘法进行优化计算求出被测物体最有可能存在的地方。
设收到信号的探测站的直角坐标分别为Di (xi ,yi ,zi ),i =1,…,N 。
接收到信号的时间分别为ti ,…,tN ,被测物体的直角坐标为p (x ,y ,z ),当前时间为t ,第i 个探测站探头与p 之间的球面距离对应的球心角为ξi ,则第i 个探测站探头探测的距离误差为:()i i i C t t e Rξ-=-i=1,2….N (2)根据最小二乘法理论,各探测站的误差平方和为最小,即:21()(,,)[]m inNi ii C t t E x y z Rξ=-=-=∑(3)(,,)0(,,)0(,,)dE x y t dx dE x y t dy dE x y t dt=== (4)即:111()[]0()[]0()[]0Ni ii i Ni iii N i i i C t t d R dx C t t d R dy C t t CR Rξξξξξ===--=--=--=∑∑∑ (5)其中:arccos()i ii i i i xx yy zz z ξθθ==++=(6)可由上式几个推导式子中选择用于MatlLab 编程的算法依据。
北斗接收机位置解算算法及验证

北斗接收机位置解算算法及验证
刘瑞华;丁其金
【期刊名称】《全球定位系统》
【年(卷),期】2018(43)4
【摘要】接收机位置解算作为卫星导航定位中极其重要的一环,所使用算法的正确与否,直接影响到定位精度.文中使用诺瓦泰接收机采集到的北斗星历数据和伪距观测量,对北斗接收机位置解算的经典算法,包括北斗卫星位置的解算算法和最小二乘法接收机位置解算算法,进行了计算及分析验证.结果表明,利用北斗空间控制接口文件所提供的算法计算所得卫星位置三维误差均在10 m以下,使用最小二乘法解算出的接收机位置三维误差均在5 m以下,均满足北斗官方性能规范要求,从而验证了算法的正确性以及可行性.
【总页数】6页(P85-90)
【作者】刘瑞华;丁其金
【作者单位】中国民航大学电子信息与自动化学院,天津300300;中国民航大学电子信息与自动化学院,天津300300
【正文语种】中文
【中图分类】V448.2
【相关文献】
1.低价GPS接收机用户位置的解算方法 [J], 秦振华
2.北斗无源授时用户接收机中GEO卫星星历求解算法 [J], 杨光;廖炳瑜;袁洪
3.北斗中长基线三频模糊度解算的自适应抗差滤波算法 [J], 高扬骏;吕志伟;周朋进;贾铮洋;张伦东;丛佃伟
4.基于北斗位置服务的核心解算研究 [J], 刘晓陆; 左佳; 姚鹏君
5.北斗三号卫星导航信号接收机端伪距偏差建模与验证 [J], 毛飞宇;龚晓鹏;辜声峰;王琛琛;楼益栋
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
% 初始化
settings.c = 299792458; % 光速 [m/s]
nmbOfIterations = 7;
dtr = pi/180;
pos = zeros(4, 1);
X = satpos;
nmbOfSatellites = size(satpos, 2);
%--- 找卫星仰角 ----------------
% [az(i), el(i), dist] = topocent(pos(1:3, :), Rot_X - pos(1:3, :));
trop = 0;%对流层改正为0
end % if iter == 1 ... ... else
(X(3, i) - pos(3))^2;
traveltime = sqrt(rho2) / settings.c ;
%--- 改正卫星由于地球运动引起位置改变 --------
Rot_X = e_r_corr(traveltime, X(:, i));
trop = 2;
else
%--- 方程更新 -----------------------------------------
rho2 = (X(1, i) - pos(1))^2 + (X(2, i) - pos(2))^2 + ...
%--- 改正 ----------------------------------------
omc(i) = (obs(i) - norm(Rot_X - pos(1:3), 'fro') - pos(4) - trop);
%---重构 A矩阵 ---------------------------------------
for iter = 1:nmbOfIterations
for i = 1:nmbOfSatellites
if iter == 1
%--- 第一次迭代时初始化变量 --------------
Rot_X = X(:, i);
%--- 旋转角 --------------------------------------------------
omegatau = Omegae_dot * traveltime;
%--- 旋转矩阵 -----------------------------------------------
1 ];
end % for iThese lines allow the code to exit gracefully in case of any errors
if rank(A) ~= 4
%
% 输入:
% travelTime - 信号传输时间
% X_sat - 卫星的 ECEF坐标
%
% 输出:
% X_sat_rot - 旋转的卫星坐标 (ECEF)
Omegae_dot = 7.292115147e-5; % rad/sec
A = zeros(nmbOfSatellites, 4);
omc = zeros(nmbOfSatellites, 1);
az = zeros(1, nmbOfSatellites);
el = az;
%=== 迭代计算接收机位置 ===================================
dop = zeros(1, 5);
%--- 计算 DOP ----------------------------------------------------
Q = inv(A'*A);
dop(1) = sqrt(trace(Q)); % GDOP
function [pos, el, az, dop] = leastSquarePos(satpos, obs)
%最小二乘接收机位置计算.
%
%[pos, el, az, dop] = leastSquarePos(satpos, obs, settings);
%
% 输入
% satpos - 卫星位置 (ECEF坐标系: [X; Y; Z;] -每颗卫星一列)
pos = zeros(1, 4);
return
end
%--- 计算位置 ---------------------------------------------
x = A \ omc;
%--- 位置更新--------------------------------------------
R3 = [ cos(omegatau) sin(omegatau) 0;
-sin(omegatau) cos(omegatau) 0;
0 0 1];
%--- 旋转 ------------------------------------------------------
dop(2) = sqrt(Q(1,1) + Q(2,2) + Q(3,3)); % PDOP
dop(3) = sqrt(Q(1,1) + Q(2,2)); % HDOP
dop(4) = sqrt(Q(3,3)); % VDOP
% el - 卫星仰角 (degrees)
% az - 卫星方位角 (degrees)
% dop - 精度因子 ([GDOP PDOP HDOP VDOP TDOP])
%--------------------------------------------------------------------------
dop(5) = sqrt(Q(4,4)); % TDOP
end
function X_sat_rot = e_r_corr(traveltime, X_sat)
%
%X_sat_rot = e_r_corr(traveltime, X_sat);
% obs - 伪距观测量
% (e.g. [20000000 21000000 .... .... .... .... ....])
%
% 输出:
% pos - 接收机位置和时钟误差(in ECEF system: [X, Y, Z, dt])
A(i, :) = [ (-(Rot_X(1) - pos(1))) / obs(i) ...
(-(Rot_X(2) - pos(2))) / obs(i) ...
(-(Rot_X(3) - pos(3))) / obs(i) ...
X_sat_rot = R3 * X_sat;
pos = pos + x;
end % for iter = 1:nmbOfIterations
pos = pos';
%=== 计算几何因子======================================
if nargout == 4
%---初始化输出 ------------------------------------------------