STM32启动概述
解析STM32启动过程

解析STM32启动过程
STM32启动过程是指当电源被接通时,STM32芯片进行自检并加载固
件的过程。
这个过程可以分为四个主要阶段:复位阶段、时钟初始化阶段、中断向量表重定位阶段和主函数执行阶段。
时钟初始化阶段是STM32启动的第二个阶段。
在复位阶段,系统时钟
会被配置为默认的内部RC振荡器,通常为8MHz。
在时钟初始化阶段,可
以通过程序代码来配置系统时钟,包括选择和配置时钟源、设置时钟分频等。
时钟的初始化是系统正常运行的前提条件,因为大多数外设的工作频
率都与系统时钟相关。
主函数执行阶段是STM32启动的最后一个阶段。
在中断向量表重定位
完成后,主函数会被调用执行。
主函数中通常会初始化系统的各种外设,
配置时钟、GPIO、中断等,并进入一个无限循环等待外设事件的发生。
一
旦外设事件发生,会触发中断,处理对应的中断服务程序。
总结来说,STM32启动过程包括复位阶段、时钟初始化阶段、中断向
量表重定位阶段和主函数执行阶段。
复位阶段进行系统自检和硬件初始化,时钟初始化阶段配置系统时钟,中断向量表重定位阶段将中断向量表重定
位到实际的起始地址,主函数执行阶段初始化外设并进入循环等待外设事
件的发生。
这个过程是STM32系统启动的基本过程,对于系统的正常运行
起着关键作用。
STM32启动文件:startup_stm32f10x_hd.s等启动文件的简单描述
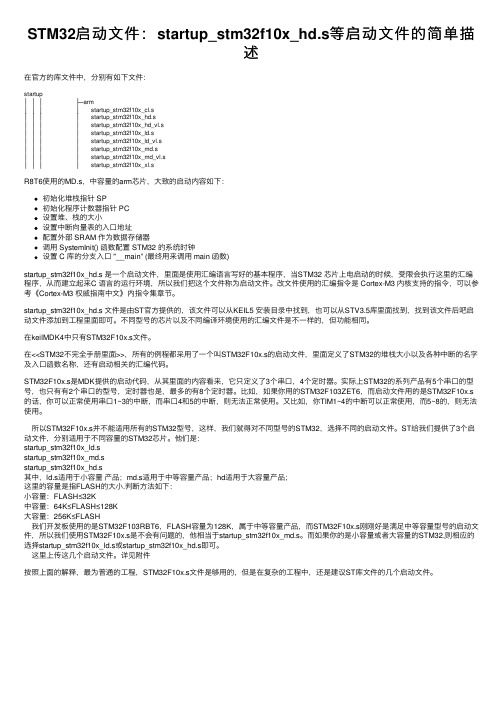
STM32启动⽂件:startup_stm32f10x_hd.s等启动⽂件的简单描述在官⽅的库⽂件中,分别有如下⽂件:startup│││├─arm││││ startup_stm32f10x_cl.s││││ startup_stm32f10x_hd.s││││ startup_stm32f10x_hd_vl.s││││ startup_stm32f10x_ld.s││││ startup_stm32f10x_ld_vl.s││││ startup_stm32f10x_md.s││││ startup_stm32f10x_md_vl.s││││ startup_stm32f10x_xl.sR8T6使⽤的MD.s,中容量的arm芯⽚,⼤致的启动内容如下:初始化堆栈指针 SP初始化程序计数器指针 PC设置堆、栈的⼤⼩设置中断向量表的⼊⼝地址配置外部 SRAM 作为数据存储器调⽤ SystemInit() 函数配置 STM32 的系统时钟设置 C 库的分⽀⼊⼝ "__main” (最终⽤来调⽤ main 函数)startup_stm32f10x_hd.s 是⼀个启动⽂件,⾥⾯是使⽤汇编语⾔写好的基本程序,当STM32 芯⽚上电启动的时候,受限会执⾏这⾥的汇编程序,从⽽建⽴起来C 语⾔的运⾏环境,所以我们把这个⽂件称为启动⽂件。
改⽂件使⽤的汇编指令是 Cortex-M3 内核⽀持的指令,可以参考《Cortex-M3 权威指南中⽂》内指令集章节。
startup_stm32f10x_hd.s ⽂件是由ST官⽅提供的,该⽂件可以从KEIL5 安装⽬录中找到,也可以从STV3.5库⾥⾯找到,找到该⽂件后吧启动⽂件添加到⼯程⾥⾯即可。
不同型号的芯⽚以及不同编译环境使⽤的汇编⽂件是不⼀样的,但功能相同。
在keilMDK4中只有STM32F10x.s⽂件。
在<<STM32不完全⼿册⾥⾯>>,所有的例程都采⽤了⼀个叫STM32F10x.s的启动⽂件,⾥⾯定义了STM32的堆栈⼤⼩以及各种中断的名字及⼊⼝函数名称,还有启动相关的汇编代码。
stm32启动文件详解及SystemInit函数分析

DCD SysTick_Handler ; SysTick Handler
; External Interrupts
DCD WWDG_IRQHandler ; Window Watchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
;__main函数由编译器生成,负责初始化栈、堆等,并在最后跳转到用户自定义的main()函数,来到C的世界。
Stack_Size EQU 0x00000400 ;//定义堆栈大小
AREA STACK, NOINIT, READWRITE, ALIGN=3 ;//定义一个数据段 按8字节对齐 ;AREA 伪指令用于定义一个代码段或数据段 NOINIT:指定此数据段仅仅保留了内存单元,而没有将各初始值写入内存单元,或者将各个内存单元值初始化为0
;链接器检查要求堆栈八字节对齐的任何代码是否仅由保持堆栈八字节对齐的代码直接或间接地调用。
PRESERVE8 ;//指示编译器8字节对齐
Байду номын сангаас THUMB ;//指示编译器以后的指令为THUMB指令
;中断向量表定义
; Vector Table Mapped to Address 0 at Reset
;中断函数仅仅实现了Reset_Handler,其他要么是死循环,要么仅仅定义了函数名称
;STM32被设置为从内部FLASH启动时(这也是最常见的一种情况),当STM32遇到复位信号后,
解析STM32的启动过程
解析STM32的启动过程STM32的启动过程可以分为硬件启动过程和软件启动过程两部分。
硬件启动过程主要是指芯片上电后的初始化阶段,而软件启动过程则是指固定在芯片内的启动程序的执行过程。
硬件启动过程1.上电复位:当STM32芯片上电后,会进行一次复位操作,将片内的所有寄存器初始化为默认值。
2.时钟初始化:芯片复位后,需要初始化芯片的各个时钟源和时钟分频系数。
例如,配置系统时钟、外设时钟和外设时钟的分频。
3.外设初始化:初始化芯片的各个外设,包括GPIO、USART、SPI、I2C等。
外设初始化主要是配置相应的寄存器使它们能够正常工作。
4.中断向量表:中断向量表是储存在芯片中的一系列函数指针,用于响应中断事件。
在硬件启动过程中,需要将中断向量表的地址设定为固定的位置,并将其中各个中断的函数指针初始化为默认的中断服务函数。
5.系统堆栈初始化:系统堆栈是用于存储函数调用时的临时变量和程序返回地址的存储区域。
在硬件启动过程中,需要初始化系统堆栈指针,为后续的函数调用和中断处理做准备。
6. 程序复位:在芯片复位后,可以选择从外部存储器(如Flash)中加载启动程序,或从内部存储器(如内置Bootloader)中加载启动程序。
启动程序一般是一个二进制文件,其中包含了一系列的初始化指令和应用程序的入口点。
软件启动过程1.初始化函数:启动程序首先执行初始化函数,用于初始化C库、变量和硬件资源等。
例如,初始化堆栈指针、启动C库和启用FPU等。
2.系统时钟初始化:启动程序需要初始化系统时钟,以使系统能够正常工作。
这包括设置主时钟源、配置主时钟分频系数和外设时钟分频系数等。
3.初始化其他硬件资源:启动程序会初始化其他的硬件资源,例如外设、存储器、中断控制器等。
4.跳转到主函数入口点:启动程序最后一步是跳转到主函数的入口点,开始执行用户代码。
总结STM32的启动过程可以分为硬件启动过程和软件启动过程。
硬件启动过程包括上电复位、时钟初始化、外设初始化、中断向量表配置和系统堆栈初始化等操作。
解析STM32的启动过程

解析STM32的启动过程当前的嵌入式应用程序开发过程里,并且C语言成为了绝大部分场合的最佳选择。
如此一来main函数似乎成为了理所当然的起点——因为C程序往往从main函数开始执行。
但一个经常会被忽略的问题是:微控制器(单片机)上电后,是如何寻找到并执行main函数的呢?很显然微控制器无法从硬件上定位main函数的入口地址,因为使用C语言作为开发语言后,变量/函数的地址便由编译器在编译时自行分配,这样一来main函数的入口地址在微控制器的内部存储空间中不再是绝对不变的。
相信读者都可以回答这个问题,答案也许大同小异,但肯定都有个关键词,叫“启动文件”,用英文单词来描述是“Bootloader”。
无论性能高下,结构简繁,价格贵贱,每一种微控制器(处理器)都必须有启动文件,启动文件的作用便是负责执行微控制器从“复位”到“开始执行main函数”中间这段时间(称为启动过程)所必须进行的工作。
最为常见的51,AVR或MSP430等微控制器当然也有对应启动文件,但开发环境往往自动完整地提供了这个启动文件,不需要开发人员再行干预启动过程,只需要从main函数开始进行应用程序的设计即可。
话题转到STM32微控制器,无论是keiluvision4还是IAR EWARM开发环境,ST公司都提供了现成的直接可用的启动文件,程序开发人员可以直接引用启动文件后直接进行C应用程序的开发。
这样能大大减小开发人员从其它微控制器平台跳转至STM32平台,也降低了适应STM32微控制器的难度(对于上一代ARM 的当家花旦ARM9,启动文件往往是第一道难啃却又无法逾越的坎)。
相对于ARM上一代的主流ARM7/ARM9内核架构,新一代Cortex内核架构的启动方式有了比较大的变化。
ARM7/ARM9内核的控制器在复位后,CPU会从存储空间的绝对地址0x000000取出第一条指令执行复位中断服务程序的方式启动,即固定了复位后的起始地址为0x000000(PC = 0x000000)同时中断向量表的位置并不是固定的。
stm32启动文件和汇编指令简析
stm32启动⽂件和汇编指令简析
以stm32fxxxx为例
⼀、启动⽂件,startup_stm32f40_41xxx.S
1.定义:启动⽂件由汇编填写,是系统上电复位后第⼀个执⾏的程序。
2.特征
(1)初始化堆栈指针SP=_initial_sp
(2)初始化PC指针=Reset_Handler
(3)初始化中断向量表。
(4)配置系统时钟。
(5)调⽤c库函数_main初始化⽤户堆栈,从⽽最终调⽤main函数去到c的内容。
⼆、汇编指令
启动⽂件使⽤ARM汇编指令汇总
EQU 给数字常量取⼀个符号名,相当于c语⾔define。
AREA 汇编⼀个新的代码段或数据段。
SPACE 分配内存空间。
PRESERVE8 当前⽂件堆栈需按照8字节对齐。
EXPORT 声明⼀个标号具有全局性,可被外部⽂件使⽤。
DCD 以字为单位分配内存,要求4字节对齐,并要求初始化这些内存。
PROC 定义⼦程序,与ENDP成对使⽤,表⽰⼦程序结束。
WEAK 弱定义,如果外部⽂件声明⼀个标号,则优先使⽤外部⽂件定义的标号,如果外部⽂件没有定义也不会出错。
要注意这个不是ARM 指令,是编译器的。
IMPORT 声明标号来⾃外部⽂件,跟c语⾔EXTERN关键字类似。
B 跳转到⼀个标志号。
STM32之启动文件详解
STM32 之启动文件详解在嵌入式应用程序开发过程里,由于使用C 语言编程,基本很少涉及到机器底层寄存器的执行过程,一般都会直接在main 函数里开始写代码,似乎main 成为了理所当然的起点,尽管从C 程序的角度来看程序都是直接从main 函数开始执行。
然而,MCU 上电后,是如何寻找到并执行main 函数这一问题却很自然的被忽略了!事实上微控制器是无法从硬件上去定位main 函数的入口地址,因为使用C 语言作为开发语言后,变量/函数的地址便由编译器在编译时自行分配,因此main 函数的入口地址在编译后便不一定是一个绝对地址。
MCU 上电后又是如何寻找到这个入口地址呢?以前接触无论是PIC、AVR、MSP430 或是51 过程中都没涉及到启动文件的配置,仅仅只有熔丝位或配置字是需要根据实际使用配置来设置,其实并非没有,而是由于大部分的开发环境往往自动完整地提供了这个启动文件,不需要开发人员再行干预启动过程,只需要从main 函数开始进行应用程序的设计即可。
然而,但接触到嵌入内核比如Linux 系统移植过程bootloader 却是很重要也是必不可少的一个环节。
事实上,每一种微控制器,无论性能高下,结构简繁,价格贵贱都是必须有启动文件才能正常工作的,它的作用同bootloader 类似。
启动文件完成了微控制器从复位到开始执行main 函数中间这段时间的必要启动配置。
在STM32 中,如果是在MDK 下创建一个工程,一般都有提示是否加入Star up Code 文件,这个就是启动文件,这里有个误区,一般对于初学者来看,很容易误以为STM32F10x.s 这个启动文件是STM32 所有类型芯片的通用启动文件,因此也自然不会去理会它的作用,事实上,这个启动文件只是。
STM32启动文件的选择及宏定义及芯片型号更改IAP总结
STM32启动文件的选择及宏定义及芯片型号更改IAP总结对于STM32芯片,启动文件主要包括以下几个部分:1.启动向量表:包含中断服务程序的地址信息,用于系统初始化和中断处理等功能。
2.中断服务程序:对中断进行处理的代码,包括系统初始化时的复位中断和其他外部中断。
3.系统初始化代码:完成芯片的初始化工作,包括时钟配置、外设初始化、堆栈初始化等。
在选择启动文件时,需要注意以下几点:1.芯片型号匹配:确保所选择的启动文件与使用的芯片型号兼容,以确保正常的系统初始化和中断处理。
2. 如需使用外部存储器:如果需要使用外部存储器,如外部Flash 或RAM,需要选择支持外部存储器的启动文件。
3. 如需使用操作系统:如果需要在系统中运行操作系统,如FreeRTOS或uc/OS等,需要选择对应操作系统的启动文件。
在启动文件中,还涉及宏定义的使用。
宏定义是一种预处理指令,用于在编译时替换特定的文本字符串。
在启动文件中,通常会使用宏定义来配置系统的时钟频率、中断向量表的起始地址等参数。
在更改芯片型号时1.切换器件描述文件:在工程文件中,需要将所使用的芯片型号对应的器件描述文件进行切换。
这个文件通常在项目设置中进行配置。
2.修改启动文件:将原有的启动文件替换为新的芯片型号所对应的启动文件。
3.更新宏定义:在新的启动文件中,需要确认并更新宏定义,以确保系统的配置和参数正确。
4.复查外设配置:在启动文件中,有可能包含对外设的初始化代码。
在更改芯片型号后,需要复查外设的配置和初始化。
总结起来,选择合适的STM32启动文件,需要根据所使用的芯片型号来进行选择,并注意更改宏定义和复查外设配置。
这样才能确保系统正常初始化和中断处理的功能。
STM32 的三种不同启动模式

STM32 的三种不同启动模式STM32 三种启动模式对应的存储介质均是芯片内置的,它们是:1. 用户闪存:芯片内置的Flash。
2. SRAM:芯片内置的RAM 区,就是内存啦。
3. 系统存储器:芯片内部一块特定的区域,芯片出厂时在这个区域预置了一段Bootloader,就是通常说的ISP 程序。
这个区域的内容在芯片出厂后没有人能够修改或擦除,即它是一个ROM 区。
在每个STM32 的芯片上都有两个管脚BOOT0 和BOOT1,这两个管脚在芯片复位时的电平状态决定了芯片复位后从哪个区域开始执行程序,见下表:BOOT1=x BOOT0=0 从用户闪存启动,这是正常的工作模式。
BOOT1=0 BOOT0=1 从系统存储器启动,这种模式启动的程序功能由厂家设置。
BOOT1=1 BOOT0=1 从内置SRAM 启动,这种模式可以用于调试。
要注意的是,一般不使用内置SRAM 启动(BOOT1=1 BOOT0=1),因为SRAM 掉电后数据就丢失。
多数情况下SRAM 只是在调试时使用,也可以做其他一些用途。
如做故障的局部诊断,写一段小程序加载到SRAM 中诊断板上的其他电路,或用此方法读写板上的Flash 或EEPROM 等。
还可以通过这种方法解除内部Flash 的读写保护,当然解除读写保护的同时Flash 的内容也被自动清除,以防止恶意的软件拷贝。
STM32 PB2(BOOT1)使用注意由于STM32 PB2 脚是复用引脚,而且该复用功能是用于启动选择,使用时就要小心了。
-------------------------------------------------------------------------BOOT1 BOOT0 启动模式说明X 0 用户闪存存储器用户闪存存储器被选为启动区域0 1 系统存储器系统存储器被选为启动区域(进入ISP 模式)1 1 内嵌SRAM 内嵌SRAM 被选为启动区域-------------------------------- -----------------------------------------一般来讲我们正常使用是模式1(用户闪存存储。
一文了解STM32启动过程
一文了解STM32启动过程1 概述说明每一款(芯片)的启动文件都值得去研究,因为它可是你的程序跑的最初一段路,不可以不知道。
通过了解启动文件,我们可以体会到处理器的架构、指令集、中断向量安排等内容,是非常值得玩味的。
(STM32)作为一款高端Cortex-M3系列(单片机),有必要了解它的启动文件。
打好基础,为以后优化程序,写出高质量的代码最准备。
本文以一个实际测试代码--START_(TE)ST为例进行阐述。
整体过程STM32整个启动过程是指从上电开始,一直到运行到main 函数之间的这段过程,步骤为(以使用微库为例):①上电后(硬件)设置SP、PC②设置系统(时钟)③软件设置SP④加载.data、.bss,并初始化栈区⑤跳转到C文件的main函数代码启动过程涉及的文件不仅包含startup_stm32f10x_hd.s,还涉及到了MDK自带的连接库文件entry.o、entry2.o、entry5.o、entry7.o 等(从生成的map文件可以看出来)。
2 程序在Flash上的存储结构在真正讲解启动过程之前,先要讲解程序下载到Flash上的结构和程序运行时(执行到main函数)时的S(RAM)数据结构。
程序在用户Flash上的结构如下图所示。
下图是通过阅读hex文件和在MDK下调试综合提炼出来的。
上图中:MSP初始值由编译器生成,是主堆栈的初始值。
初始化数据段是.data未初始化数据段是.bss.data和.bss是在__main里进行初始化的,对于(ARM)Com (pi)ler,__main主要执行以下函数:其中__scatterlo(ad)会对.data和.bss进行初始化。
加载数据段和初始化栈的参数加载数据段和初始化栈的参数分别有4个,这里只讲解加载数据段的参数,至于初始化栈的参数类似。
0x0800033c Flash上的数据段(初始化数据段和未初始化数据段)起始地址0x20000000加载到SRAM上的目的地址0x0000000c数据段的总大小0x080002f4调用函数_scatterload_copy需要说明的是初始化栈的函数-- 0x08000304与加载数据段的函数不一样,为_scatterload_zeroinit,它的目的就是将栈空间清零。
STM32的启动
STM32的启动1、启动⽂件简介 启动⽂件由汇编编写,是系统上电复位后第⼀个执⾏的程序。
主要做了以下⼯作: (1)初始化堆栈指针 MSP=_initial_sp (2)初始化 PC 指针=Reset_Handler (3)初始化中断向量表 (4)配置系统时钟 (5)调⽤ C 库函数_main 初始化⽤户堆栈,从⽽最终调⽤ main 函数去到 C 的世界2、STM32的启动流程 下⾯这段话引⽤⾃《CM3 权威指南 CnR2》—复位序列, CM4 的复位序列跟 CM3 ⼀样。
在离开复位状态后, CM3 做的第⼀件事就是读取下列两个 32 位整数的值: (1)从地址 0x0000,0000(FLASH 的地址 0x08000000,因为STM32设计的Flash起始地址是在0x0800 0000开始的)处取出 MSP 的初始值。
(2)从地址 0x0000,0004(FLASH 的地址 0x08000004,因为STM32设计的Flash起始地址是在0x0800 0000开始的)处取出 PC 的初始值——这个值是复位向量, LSB 必须是1,然后从这个值所对应的地址处取值。
请注意,这与传统的 ARM 架构不同——其实也和绝⼤多数的其它单⽚机不同。
传统的 ARM 架构总是从 0 地址开始执⾏第⼀条指令。
它们的 0 地址处总是⼀条跳转指令。
在CM3 中,在 0 地址处提供 MSP 的初始值,然后紧跟着就是向量表。
向量表中的数值是 32位的地址,⽽不是跳转指令。
向量表的第⼀个条⽬指向复位后应执⾏的第⼀条指令,就是我们刚刚分析的 Reset_Handler 这个函数。
初始化 MSP 和 PC 的⼀个范例 因为 CM3 使⽤的是向下⽣长的满栈,所以 MSP 的初始值必须是堆栈内存的末地址加1。
举例来说,如果我们的堆栈区域在 0x20007C00-0x20007FFF 之间,那么 MSP 的初始值就必须是 0x20008000。
STM32启动文件详解及SystemInit函数分析

1/6/afeibfp/archive/2013/01/08/2850408.html <2013年1月>日一二三四五六303112345678910111213141516171819202122232425262728293031123456789昵称:afeibfp 园龄:2年5个月粉丝:0关注:0+加关注搜索找找看 谷歌搜索常用链接我的随笔我的评论我的参与最新评论我的标签更多链接我的标签51单片机(2)多字节除法(2)汇编(2)随笔分类(2)转发(2)随笔档案(16)2013年1月 (14)2011年9月 (2)最新评论1. Re:014:针对mdk 中STM32程序无法使用printf ,产生停留BEAB BKPT 0xAB 处问题的解决(转)不点那个MiclroLIB 就行了--blakeliu阅读排行榜1. 001:无符号双字节除以单字节(51单片机,汇编源码)(418)2. 004:STM32启动文件详解及SystemInit 函数分析(转)(389)3. 014:针对mdk 中STM32程序无法使用printf ,产生停留BE AB BKPT 0xAB 处问题的解决(转)(312)4. 010:请教STM32用JLINK V8 SWD 输出调试信息到ITM V iewer 的问题(转)(208)5. 009:semihost/ITM 机制浅析以及使用JLINK 通过ITM 调试stm32单片机(转)(190)评论排行榜1. 014:针对mdk 中STM32程序无法使用printf ,产生停留BE AB BKPT 0xAB 处问题的解决(转)(1)2. 013:ADS semihosting 与硬件重定向(转)(0)3. 012:Keil 调试技术(转)(0)4. 011:Nuvoton(新唐) Cort ex M0 使用semihost 输入输出办法(转)(0)5. 010:请教STM32用JLINK V8 SWD 输出调试信息到ITM V iewer 的问题(转)(0)推荐排行榜博客园首页新随笔联系管理订阅 随笔- 16 文章- 0 评论- 1afeibfp004:STM32启动文件详解及SystemInit 函数分析(转)1 ;先在R A M 中分配系统使用的栈,R A M 的起始地址为0x 2000_00002 ;然后在R A M 中分配变量使用的堆3 ;然后在C O D E 区(f l a s h )分配中断向量表,f l a s h 的起始地址为0x 0800_0000,该中断向量表就从这个起始地址开始分配4 ;分配完成后,再定义和实现相应的中断函数,5 ;所有的中断函数全部带有[w e a k ]特性,即弱定义,如果编译器发现在别处文件中定义了同名函数,在链接时用别处的地址进行链接。
STM32:启动过程
STM32:启动过程前⾔ 上电之后,CPU⾸先根据boot引脚选择存储器重映射区域,将该区域的地址重映射为地址偏移量为0; CPU从地址偏移量为0的地址处开始执⾏;该地址烧录的代码必须是xx.s启动⽂件,使⽤汇编语⾔编写; 上电之后,具体步骤截图如下;执⾏完以下步骤之后单⽚机就可以开始使⽤外设,运⾏逻辑代码了; 另外,MDK并没有将启动⽂件的所有配置开源,⽐如⼀部分的配置由__main闭源执⾏; 我们只能配置开源的⼀部分启动⽂件的参数;本⽂我们了解⼀下完整的启动流程及其原理;1 boot的启动⽅式 1.1 对于STM32的F0和F4开发板⽽⾔,⼀共有3种启动⽅式;以下的存储空间⼤⼩和地址是以⼤容量F1芯⽚作为参考的;不同芯⽚有⼀些差别; 注意下⾯存储空间⼤⼩的单位都是byte,这是因为内存的数据线是8bit的;内存的数据线和单⽚机的数据线是不同的总线;boot[0:1]启动地址存储空间启动⽅式事项[0:x]0x0800 0000-0x0807 FFFF512KbytesFlash启动使⽤JTAG或SWD下载较为常⽤;[1:0]0x1FFF F000-0x1FFF F7FF2Kbytes系统存储器启动使⽤串⼝下载,代码是通过bootloader搬运到flash中;该区域内存储了⼚家烧录的bootloader程序(即ISP程序),需要配合st提供的下载软件;[1:1]0x2000 0000-0x2001 000064Kbytes内嵌SRAM启动使⽤JTAG或SWD下载,仅⽀持调试模式;较为少⽤;没有掉电存储程序的功能,需要添加宏定义VECT_TAB_SRAM,配合脚本⽂件使⽤; 1.2 对于 STM32H7x3 ⽽⾔,只有⼀个boot引脚,配合BOOT_ADD0/BOOT_ADD1 的组合配置,可以让系统从两个不同的区域启动;boot引脚启动地址默认值默认值启动⽅式事项0BOOT_ADD0[15:0] 0x0800Flash启动启动地址⾼16位由BOOT_ADD0寄存器决定,低16位为0x0000;BOOT_ADD0寄存器可以修改,修改后掉电不丢失;0x0000 0000 到 0x3FFF 0000 的存储器地址都可以设置;1BOOT_ADD1[15:0] 0x1FF0系统存储器启动2 startup_stm32h743xx.s的堆栈 2.1 堆栈的汇编程序1;********************** ⽬的是分配数据段⽤来做"栈"**********************2; 表⽰即将声明数据段STACK⽤来做"栈",不⽤填⼊初始数据,可读写,⾸地址按照2^3对齐(8字节对齐);3 Stack_Size EQU 0x000010004 AREA STACK, NOINIT, READWRITE, ALIGN=35 Stack_Mem SPACE Stack_Size6 __initial_sp78; **********************⽬的是分配数据段⽤来做"堆"**********************9 Heap_Size EQU 0x000080010 AREA HEAP, NOINIT, READWRITE, ALIGN=311 __heap_base12 Heap_Mem SPACE Heap_Size13 __heap_limit 2.2 那么什么是堆栈呢?总结了⼀下,⼤概概括成了下⾯的表格形式;主要⽤来存储局部变量,变量的内存块;栈空间是从⾼地址开始向低地址⽣长的;STACK 栈对于多级调⽤的函数⼊⼝地址,需要使⽤栈空间配合连接寄存器来存储主调函数的地址;Stack_Mem表⽰栈的⾸地址,应该是给microLIB库使⽤的;__initial_sp栈标号,表⽰栈顶地址;也就是栈的内存最⼤地址;动态分配时使⽤的内存块;堆空间是从低地址向⾼地址⽣长的;HEAP 堆如果程序中没有使⽤到动态内存分配的话,编译器是不会编译出"堆"空间的;__heap_base 堆标号,表⽰"堆"的起始地址Heap_Mem 表⽰堆的⾸地址,应该是给microLIB库使⽤的;__heap_limit 堆标号,表⽰"堆"的结束地址 2.3 ⾄于堆栈标号Stack_Mem和Stack_Size⼤概是标识堆栈地址给microLIB库使⽤的把,应该没什么⽤;如下所⽰;MDK针对嵌⼊式推出了microLIB⼩型库,在功能上是⽤来替代C标准库的;;下⾯代码的功能主要是决定要不要启⽤microLIB库;以下代码⽐较不重要;IF :DEF:__MICROLIBEXPORT __initial_spEXPORT __heap_baseEXPORT __heap_limitELSEIMPORT __use_two_region_memoryEXPORT __user_initial_stackheap__user_initial_stackheapLDR R0, = Heap_MemLDR R1, =(Stack_Mem + Stack_Size)LDR R2, = (Heap_Mem + Heap_Size)LDR R3, = Stack_MemBX LRALIGNENDIF3 startup_stm32h743xx.s的中断向量表;**************中断向量表*****************************************************************AREA RESET, DATA, READONLY ; 即将声明⼀个内存区域RESET,是数据段,只读;EXPORT __Vectors ; 声明"标识__Vectors"可以被外部⽂件调⽤EXPORT __Vectors_End ; 声明"标识__Vectors_End"可以被外部⽂件调⽤EXPORT __Vectors_Size ; 声明"标识__Vectors_Size"可以被外部⽂件调⽤__Vectors DCD __initial_sp ; 分配4字节内存,初始化为栈顶地址,该内存开始的地址标识为"__Vectors"DCD Reset_Handler ; 分配4字节内存,放⼊复位中断服务函数的"地址标识Reset Handler"DCD NMI_Handler ;;.....DCD 0;DCD WAKEUP_PIN_IRQHandler ;__Vectors_End ; 内存结束的地址标识为"__Vectors_End"__Vectors_Size EQU __Vectors_End - __Vectors ; 声明标识"__Vectors_Size"⽤来表⽰中断向量表的⼤⼩;**************汇编代码段:上电复位中断服务程序举例***************************************************************AREA |.text|, CODE, READONLY ; 即将声明⼀个内存区域.text,是代码段,只读;Reset_Handler PROC ;伪指令PROC和ENDP⽤来声明⼀个程序,当前程序段标识为"Reset_Handler"EXPORT Reset_Handler [WEAK] ;声明当前程序可被外部函数调⽤,为弱函数IMPORT SystemInit ;引⼊⽂件外部声明的函数SystemInit()IMPORT __main ;引⼊⽂件外部声明的函数__main()LDR R0, =SystemInit ;将32bit函数⼊⼝地址放⼊R0寄存器中?BLX R0 ;跳转到R0寄存器内的地址去执⾏?LDR R0, =__main ;__main为编译器⾃动⽣成的函数,主要是解析代码段table的数据,然后跳转到main函数执⾏,BX R0 ;给需要初始化的变量和不需要初始化的变量分配堆栈运⾏空间;ENDP ;;**************汇编代码段:NMI中断服务程序举例***************************************************************NMI_Handler PROC ;EXPORT NMI_Handler [WEAK] ;这⾥导⼊了中断服务程序,如果外部⽂件写了,那此处的弱函数就不使⽤了B . ;B. 表⽰在这⾥跳转当前程序? 就是跳转到前⾯导⼊的程序ENDP ; 3.1 伪指令 相当于预处理器指令,编译器在编译时会进⾏替换,并不占⽤内存空间;EQU声明常数,汇编的常数单位不是bit,⽽是byteAREA表⽰即将分配⼀个数据段或代码段;需要跟分配内存的SPACE指令⼀起使⽤;EXPORT声明为可被外部⽂件引⽤,主要提供给链接器⽤于连接库⽂件;IMPORT引⼊外部⽂件声明WEAK弱声明,如果外部⽂件有相同的声明,则编译外部⽂件的声明,不编译弱声明ALIGN声明编译器需要对指令或数据的存放地址进⾏对齐;默认缺省值为32bit对齐PRESERVE8当前⽂件的堆栈需按照8字节对齐,也就是64bit数据线对齐;THUMB表⽰接下来的指令都是thumb指令集,cm3,cm7采⽤的是thumb-2指令集, 3.2 汇编指令SPACE分配⼀段内存空间,并初始化这些内存空间为0;需要跟声明内存属性的AREA伪指令⼀起使⽤;DCD Define Constant Double-words;分配4字节的内存空间⽤来存储⼀个32bit的数据;并初始化这些内存空间;LDR Load word;加载指令,将32bit数据存⼊⽬的寄存器中;B Branch,跳转到⽬标地址执⾏,执⾏指令集为ARM指令集BX Branch with Exchange;跳转到⽬的地址执⾏,并且指令集从ARM指令集切换到thumb指令集;BLX Branch with Link and Exchange;thumb-2兼容许多thumb指令,但是cortex-m3不⽀持当前指令; 3.3 注释零散1[地址]:地址加了[],⽤来表⽰地址内的数据;零散2汇编指令中的常数都是地址,⾃然数的格式为#常数;4 main函数的初始化 在配置外设之前,单⽚机⾸先还需要配置⼀下⼯作环境;主要涉及到以下⼏个c⽂件的函数;具体的话也不要求精确分析,轮廓了解⼀下; 4.1 stm32h7xx_hal.c 主要是IO电压的配置函数,boot引脚的启动配置,以及systick的hal库函数;/* stm32h7xx_hal.h: line528: Peripheral Control functions systick使⽤和配置,电压配置,boot配置等******************/void HAL_IncTick(void); //SysTick_Handler()中断服务函数调⽤的函数,装载systick为1ms(HAL_TICK_FREQ_1KHZ),void HAL_Delay(__IO uint32_t Delay); //systick时钟延时,单位ms;uint32_t HAL_GetTick(void);uint32_t HAL_GetTickPrio(void);HAL_StatusTypeDef HAL_SetTickFreq(HAL_TickFreqTypeDef Freq);HAL_TickFreqTypeDef HAL_GetTickFreq(void);void HAL_SuspendTick(void); //挂起systickvoid HAL_ResumeTick(void); //恢复systickvoid HAL_SYSCFG_VREFBUF_VoltageScalingConfig(uint32_t VoltageScaling); //line575:配置IO⼝输出的电压范围 4.2 stm32h7xx_hal_rcc.c 主要是rcc相关的晶振使能,以及总线时钟的配置;以及⼀些查看配置参数的函数;/*stm32h7xx_hal_rc.h line2814*/void HAL_RCC_DeInit(void);//复位RCC默认配置;使⽤HSI;关闭HSE,PLL;根据时钟树可知外设及总线为HSI-64MhzHAL_StatusTypeDef HAL_RCC_OscConfig(RCC_OscInitTypeDef *RCC_OscInitStruct);//配置晶振是否使能,以及PLL1不为sysclk时PLL1的参数配置;HAL_StatusTypeDef HAL_RCC_ClockConfig(RCC_ClkInitTypeDef *RCC_ClkInitStruct, uint32_t FLatency);//配置CPU(sysclk),AHB,APB..分频系数; 4.3 stm32h7xx_hal_cortex.c 主要是cortex内核的外设NVIC和MPU的配置函数;以及⼀些systick的使⽤函数;之后再分析内核外设的时候⼀起讲把; 不知道为什么在stm32h7xx_hal.c已经有systick的函数了,这⾥⼜有,没有将他们放⼀个⽂件⾥;先留着疑问;5 ⼩结 1)对于启动配置⽽⾔⼀直以来只使⽤过flash启动;感觉其他的具体也没试过,等需要的时候看看安富莱的视频把; 之前由于代码配置错误导致芯⽚不能flash下载的时候,试过把boot引脚切换到ISP下载模式,然后使⽤SWD下载; 当然下载之后是跑不起来的,然后再重新把boot引脚改为flash启动,此时芯⽚可以重新flash下载; 2)对于堆栈,注意⼀下,我们平常使⽤的局部数组什么的不要超出栈的内存⼤⼩,超出的话程序卡死,然后就跑不动了; 平常说的push和pop应该只针对栈⽽⾔;如果堆也能push和pop,针对⼀整块动态内存,怎么搞呢?从低地址到⾼地址搞; 3)⾄于中断向量表,主要是从偏移量0地址处开始依次分配内存,⽤来存储各种中断服务程序⼊⼝地址; ⼀些内核级别的中断程序的弱声明,这些程序除了Reset_Handler中断的弱函数执⾏了操作外,其他的都是循坏⾃⼰,使⽤时需要在⽤户程序中重新编写; 后⾯还有外设中断服务程序的弱声明,这些外设中断服务程序执⾏都是不断递归循坏⾃⼰;使⽤时需要在⽤户程序中重新编写; 4)启动⽂件本质来说,除了分配中断向量表空间之外,只主动执⾏了⼀个Reset_Handler⼀个函数, Reset_Handler函数跳转到system_init函数执⾏,然后跳转到MDK的__main函数执⾏;其他的函数都是弱声明,不断递归调⽤⾃⼰,使⽤的话需要重新写函数;。
stm32启动文件详解

STM32启动文件详解一、启动文件的作用1.初始化堆栈指针 SP;2.初始化程序计数器指针 PC;3.设置堆、栈的大小;4.设置异常向量表的入口地址;5.配置外部 SRAM作为数据存储器(这个由用户配置,一般的开发板可没有外部SRAM);6.设置 C库的分支入口__main(最终用来调用 main函数);7.在 3.5版的启动文件还调用了在 system_stm32f10x.c文件中的SystemIni()函数配置系统时钟。
二、汇编指令三、启动代码1.stack ----- 栈Stack_Size EQU 0x00000400 ; 栈的大小AREA STACK, NOINIT, READWRITE,ALIGN=3 Stack_Mem SPACE Stack_Size ; 分配栈空间__initial_sp ; 栈的结束地址(栈顶地址) 分配名为STACK,不初始化,可读可写,8(2^3)字节对齐的1KB空间。
栈:局部变量,函数形参等。
栈的大小不能超过内部SRAM大小。
AREA:汇编一个新的代码段或者数据段。
STACK段名,任意命名;NOINIT表示不初始化;READWRITE可读可写;ALIGN=3(2^3= 8字节对齐)。
__initial_sp紧挨了SPACE放置,表示栈的结束地址,栈是从高往低生长,结束地址就是栈顶地址。
2.heap ----- 堆Heap_Size EQU 0x00000200 ; 堆的大小(512Bytes)AREA HEAP, NOINIT, READWRITE,ALIGN=3__heap_base ; 堆的起始地址Heap_Mem SPACE Heap_Size ; 分配堆空间__heap_limit ; 堆的结束地址分配名为HEAP,不初始化,可读可写,8(2^3)字节对齐的512字节空间。
__heap_base堆的起始地址,__heap_limit堆的结束地址。
stm32启动文件详解

STM32启动文件详解一、启动文件的作用1. 初始化堆栈指针SP;2. 初始化程序计数器指针PC;3. 设置堆、栈的大小;4. 设置异常向量表的入口地址;5. 配置外部SRAM作为数据存储器(这个由用户配置,一般的开发板可没有外部SRAM);6. 设置C库的分支入口_main (最终用来调用main函数);7. 在3.5版的启动文件还调用了在system_stm32f10x.c文件中的SystemIni()函数配置系统时钟。
、汇编指令;栈的结束地址(栈顶地址)分配名为STACK 不初始化,可读可写,8 (2A 3 )字节对齐的1KB 空间。
栈:局部变量,函数形参等。
栈的大小不能超过内部SRAM 大小。
AREA:汇编一个新的代码段或者数据段。
STACK 段名,任意命名;NOINIT表示不初始化;READWRITEM 读可写;ALIGN=3 (2八3= 8字节对齐)。
__initial_sp 紧挨了 SPACER 置,表示栈的结束地址,栈是从高往低生长,结 束地址就是栈顶地址。
2. heap —— 堆Heap_SizeEQU 0x00000200;堆的大小(512Bytes )AREA HEAP, NOINIT, READWRITE,ALIGN=3;堆的起始地址;堆的结束地址三、启动代码 l.stackStackSizeEQU0x00000400;栈的大小AREASTACK, NOINIT, READWRITE,ALIGN=3 StackMem SPACEStack_Size ;分配栈空间__initial_sp__heap_base Heap_MemSPACE Heap_Size ;分配堆空间__heap_limit分配名为HEAP,不初始化,可读可写,8 (2A3 )字节对齐的512字节空间。
__heap_base堆的起始地址,_heap_limit堆的结束地址。
堆由低向高生长。
动态分配内存用到堆。
详解STM32 ISP设置及使用说明
详解STM32 ISP设置及使用说明(原创)1. STM32的BOOT概述STM32三种启动模式对应的存储介质均是芯片内置的,它们是:用户闪存:BOOT1=x BOOT0=0芯片内置的Flash,即主存储器FlashSRAM:BOOT1=1 BOOT0=1芯片内置的SRAM 区,就是内存啦。
系统存储器:BOOT1=0 BOOT0=1芯片内部一块特定的区域,叫做系统存储器。
芯片出厂时在这个区域预置了一段Bootloader,就是通常说的ISP程序。
这个区域的内容在芯片出厂后没有人能够修改或擦除,即它是一个ROM 区。
在每个STM32的芯片上都有两个管脚BOOT0和BOOT1,这两个管脚在芯片复位时的电平状态决定了芯片复位后从哪个区域开始执行程序,见下表:BOOT1=x BOOT0=0 从用户闪存启动,这是正常的工作模式。
BOOT1=0 BOOT0=1 从系统存储器启动,这种模式启动的程序功能由厂家设置。
BOOT1=1 BOOT0=1 从内置SRAM 启动,这种模式可以用于调试。
要注意的是,一般不使用内置SRAM 启动(BOOT1=1 BOOT0=1),因为SRAM 掉电后数据就丢失。
多数情况下SRAM 只是在调试时使用,也可以做其他一些用途。
如做故障的局部诊断,写一段小程序加载到SRAM 中诊断板上的其他电路,或用此方法读写板上的Flash 或EEPROM 等。
还可以通过这种方法解除内部Flash 的读写保护,当然解除读写保护的同时Flash 的内容也被自动清除,以防止恶意的软件拷贝。
一般BOOT0 和BOOT1 跳线都跳到0(GND),即正常的从片内Flash运行,只是在ISP下载的情况下,需要设置BOOT0=1,BOOT1=0 ,下载完成后,把BOOT0 的跳线接回0,这样系统可以正常运行了。
对于一般的应用来说,直接把BOOT0 和BOOT1 引脚接地即可,不用设置跳线,使用IAR 调试程序时可以选择RAM 调试还是Flash 调试,与BOOT0 和BOOT1 的配置无关。
STM32三种BOOT模式介绍
STM32 三种BOOT 模式介绍
一、三种BOOT 模式介绍
所谓启动,一般来说就是指我们下好程序后,重启芯片时,SYSCLK 的
第4 个上升沿,BOOT 引脚的值将被锁存。
用户可以通过设置BOOT1 和BOOT0 引脚的状态,来选择在复位后的启动模式。
Main Flash memory
是STM32 内置的Flash,一般我们使用JTAG 或者SWD 模式下载程序时,就是下载到这个里面,重启后也直接从这启动程序。
System memory
从系统存储器启动,这种模式启动的程序功能是由厂家设置的。
一般来说,这种启动方式用的比较少。
系统存储器是芯片内部一块特定的区域,STM32 在出厂时,由ST 在这个区域内部预置了一段BootLoader,也就是我们常说的ISP 程序,这是一块ROM,出厂后无法修改。
一般来说,我们选。
STM32启动模式说明

STM32启动模式说明 渤海三叠浪 理论部分理论部分Boot mode selection pins Boot mode AliasingBOOT1 BOOT0X 0 User Flash memory X 0 User Flash memory User Flash memory is selected as the boot space User Flash memory is selected as the boot space 0 1 System memory 0 1 System memory System memory is selected as the boot space System memory is selected as the boot space1 1 Embedded SRAM 1 1 Embedded SRAM Embedded SRAM is selected as Embedded SRAM is selected as Embedded SRAM is selected as the boot space the boot space the boot space《STM32三种启动模式中存储器的存储介质三种启动模式中存储器的存储介质》》引自STM32的博客STM32三种启动模式对应的存储介质均是芯片内置的三种启动模式对应的存储介质均是芯片内置的,,它们是它们是::1)用户闪存用户闪存 = = = 芯片内置的芯片内置的Flash Flash。
2)SRAM = SRAM = 芯片内置的芯片内置的RAM 区,就是内存啦就是内存啦。
3)系统存储器系统存储器 = = = 芯片内部一块特定的区域芯片内部一块特定的区域芯片内部一块特定的区域,,芯片出厂时在这个区域预置了一段Bootloader Bootloader,,就是通常说的ISP 程序程序。
这个区域的内容在芯片出厂后没有人能够在芯片出厂后没有人能够修改或擦除修改或擦除修改或擦除,,即它是一个ROM 区。
STM32启动概述
STM32启动概述首先,STM32主要由中央处理单元(CPU)、存储器(包括闪存和RAM)、外设(如串口、定时器、ADC等)、时钟和复位系统组成。
启动过程是指在系统上电或复位后,CPU执行特定的步骤来将控制权转移到用户程序的过程。
STM32的启动过程可以分为以下几个阶段:2.复位向量表重定位:复位向量表的位置可以是固定的,也可以是动态的。
在启动过程中,可以通过修改相关寄存器的值,将复位向量表重定位到其他存储器区域。
3.复位引脚配置:复位引脚负责控制系统的复位操作。
在启动过程中,需要配置复位引脚的电平、触发方式等参数。
4.时钟配置:时钟是系统正常运行的重要基础。
在启动过程中,需要配置系统时钟源、时钟频率和时钟分频器等参数,以确保系统可以正常工作。
5.异常和中断向量配置:异常和中断是STM32系统中重要的事件处理机制。
在启动过程中,需要配置异常和中断向量表,以便系统可以正确地处理相关的事件。
6.外设初始化:STM32具有丰富的外设,如串口、定时器、ADC等。
在启动过程中,需要对这些外设进行初始化,配置其工作模式、引脚连接和中断触发等参数。
7.用户程序:启动过程的最后阶段是将控制权转移到用户程序。
这可以通过简单地跳转到用户程序的入口地址来实现。
需要注意的是,以上流程仅为启动过程的一般描述,具体的细节可能因不同的STM32型号和应用场景而有所差异。
在实际应用中,可能需要根据具体需求对启动过程进行定制和优化。
除了上述的启动流程,STM32还提供了一些启动模式和调试功能,以便在开发和调试过程中更加便捷地进行操作。
例如,STM32支持通过串口或JTAG/SWD接口进行调试,并提供了系统时钟的频率调节、低功耗模式和深度休眠模式等功能。
总结起来,STM32的启动过程是一个复杂的过程,包括了复位向量表的重定位、复位引脚配置、时钟配置、异常和中断向量配置、外设初始化以及用户程序的跳转等步骤。
了解和熟悉STM32的启动流程对于正确地开发和调试嵌入式系统非常重要。
stm32上电启动流程
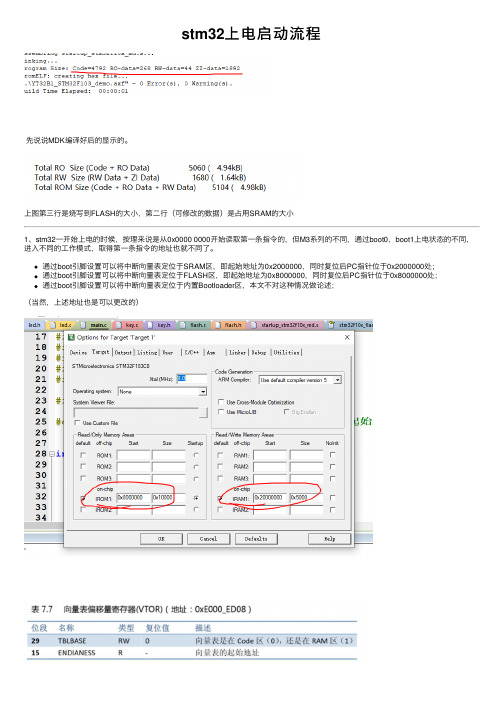
stm32上电启动流程先说说MDK编译好后的显⽰的。
上图第三⾏是烧写到FLASH的⼤⼩,第⼆⾏(可修改的数据)是占⽤SRAM的⼤⼩1、stm32⼀开始上电的时候,按理来说是从0x0000 0000开始读取第⼀条指令的,但M3系列的不同,通过boot0,boot1上电状态的不同,进⼊不同的⼯作模式,取得第⼀条指令的地址也就不同了。
通过boot引脚设置可以将中断向量表定位于SRAM区,即起始地址为0x2000000,同时复位后PC指针位于0x2000000处;通过boot引脚设置可以将中断向量表定位于FLASH区,即起始地址为0x8000000,同时复位后PC指针位于0x8000000处;通过boot引脚设置可以将中断向量表定位于内置Bootloader区,本⽂不对这种情况做论述;(当然,上述地址也是可以更改的)同时,stm32内部的该寄存器记录了,向量表偏移量的值2、0x08000000(代码区)的⼀开始位置有⼀张中断向量表,其第⼀个表项是栈顶地址,第⼆个表项是复位中断服务⼊⼝地址。
程序会先取出0x08000000的值,给sp寄存器。
再接着取0x08000004的值(即复位中断程序),给pc寄存器,去执⾏它如图,sp=0x20000690 pc=80001101我们可以从⽣成的******.map⽂件中看到pc指向的位置就是复位中断服务的⼊⼝,进⼊之后,时钟初始化,然后跳转__main函数,最后进⼊mian函数,来到C的世界3、那么sp的值⼤⼩有时怎么算出来的呢就是根据最上⾯RW SIZE的数值⼤⼩,加上MDK⾥设置的0x20000000的初始值,得出的但其实,有时候会发现⾃⼰写的程序(初始化的全局变量,静态变量之类)并没有占有这么⼤的空间。
那RW SIZE的数值⼤⼩有时哪来的呢上图为.map⽂件⾥的内容看得出只有.data和.bss才是⽤户⾃⼰添加的代码占⽤空间⼤⼩其他的HEAP,STACK都是别⽂件⾥添加上的,⽐如启动⽂件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32启动代码概述一般嵌入式开发流程就是先建立一个工程,再编写源文件,然后进行编译,把所有的*.s文件和*.c文件编译成一个*.o文件,再对目标文件进行链接和定位,编译成功后会生成一个*.hex文件和调试文件,接下来要进行调试,如果成功的话,就可以将它固化到flash里面去。
启动代码是用来初始化电路以及用来为高级语言写的软件作好运行前准备的一小段汇编语言,是任何处理器上电复位时的程序运行入口点。
比如,刚上电的过程中,PC机会对系统的一个运行频率进行锁定在一个固定的值,这个设计频率的过程就是在汇编源代码中进行的,也就是在启动代码中进行的。
与此同时,设置完后,程序开始运行,注意,程序是在内存中运行的。
这个时候,就需要把一些源文件从flash里面copy到内存中,又要对它们进行初始化读写,这又有频率的设置。
这些都是初始化。
初始化完成后,我们又要设置一些堆栈,要跳到C语言的main函数里面运行。
这就需要堆栈。
对普通的ARM CPU有这样一个要求:在绝对地址为零的地方要放置一个异常向量表,但并不是所有的ARM CPU都留有这个一个空间,这就需要用到映射的功能。
我们可以将其它地方的一些空间映射到绝对地址里面。
当发生异常时,ARM核来读取异常中断表的时候,它会使用映射之后的那个表,这个就可以接着往下执行,否则在绝对地址零的地方找不到任何信息,程序就会死掉。
这些运行的环境全部建立好后,程序就会跳转到我们的main函数里面。
总之,启动代码,就是对最小系统的初始化。
包括晶振,CPU频率等。
启动代码的最小系统是:异常向量表的初始化–存储区分配–初始化堆栈–高级语言入口函数调用– main()函数。
程序的启动过程:以下面这个例子为例,编译完后,DEBUG后,我们可以看到,光标指向绝对地址为零的地方,这里存放的就是一个异常向量表。
它对应在startup.s里的源文件如下:单步运行后,马上跳转到初始化CPU的频率。
即初始化锁相环,将其锁在一个固定的频率。
具体代码如下:; Setup PLLIFPLL_SETUP <> 0LDRR0, =PLL_BASEMOVR1, #0xAAMOVR2, #0x55;Configure and Enable PLLMOVR3, #PLLCFG_ValSTRR3, [R0, #PLLCFG_OFS]MOVR3, #PLLCON_PLLESTRR3, [R0, #PLLCON_OFS]STRR1, [R0, #PLLFEED_OFS]STRR2, [R0, #PLLFEED_OFS];Wait until PLL LockedPLL_LoopLDRR3, [R0, #PLLSTAT_OFS]ANDSR3, R3, #PLLSTAT_PLOCKBEQPLL_Loop;Switch to PLL ClockMOVR3, #(PLLCON_PLLE:OR LLCON_PLLC)STRR3, [R0, #PLLCON_OFS]STRR1, [R0, #PLLFEED_OFS]STRR2, [R0, #PLLFEED_OFS]ENDIF; PLL_SETUP然后再初始化每一种模式的堆栈,再进行单步运行的时候,下面我们可以看到,它自动跳转到main()函数:; Enter the C codeIMPORT__mainLDRR0, =__mainBXR0IFEF:__MICROLIBEXPORT__heap_baseEXPORT__heap_limitELSE这个时候,程序会运行各种scatterload函数,将我们的堆栈、全局变量等内容拷贝到内存中去。
拷贝完后,就正式跳转到我们的main()函数中来执行了。
这就是启动代码执行的全过程,呵呵,平时我们看到以为只是执行main()函数就行了,是不是没有想到在执行 main() 函数后还有这么多学问呢?STM32 启动文件解析!时间:2010-05-02 10:41来源:作者:点击:79次STM32 启动文件解析!- 技术文档- 安装启动安装启动Linux 技术文档;/*****************************************************************************/ ;/* STM32F10x.s: Startup file for ST STM32F10x device series */;/*****************************************************************************/ ;/* >> */;/*****************************************************************************/ ;/* This file is part of the uVision/ARM development tools. */;/* Copyright (c) 2005-2007 Keil Software. All rights reserved. */;/* This software may only be used under the terms of a valid, current, */;/* end user licence from KEIL for a compatible version of KEIL software */;/* development tools. Nothing else gives you the right to use this software. */;/*****************************************************************************/ ;// Stack Configuration;// Stack Size (in Bytes);//Stack_Size EQU 0x00000200;AREA 伪指令用于定义一个代码段或数据段AREA STACK, NOINIT, READWRITE, ALIGN=3 ;NOINIT:指定此数据段仅仅保留了内存单元,而没有将各初始值写入内存单元,或者将各个内存单元值初始化为0Stack_Mem SPACE Stack_Size ;分配连续Stack_Size 字节的存储单元并初始化为0__initial_sp;// Heap Configuration;// Heap Size (in Bytes);//Heap_Size EQU 0x00000000AREA HEAP, NOINIT, READWRITE, ALIGN=3__heap_baseHeap_Mem SPACE Heap_Size__heap_limit;PRESERVE8 指令指定当前文件保持堆栈八字节对齐。
它设置PRES8 编译属性以通知链接器。
;链接器检查要求堆栈八字节对齐的任何代码是否仅由保持堆栈八字节对齐的代码直接或间接地调用。
PRESERVE8THUMB ;之后的都是THUMB指令; Vector Table Mapped to Address 0 at ResetAREA RESET, DATA, READONLYEXPORT __Vectors ;EXPORT:在程序中声明一个全局的标号__Vectors,该标号可在其他的文件中引用;IMPORT:伪指令用于通知编译器要使用的标号在其他的源文件中定义,;但要在当前源文件中引用,而且无论当前源文件是否引用该标号,该标号均会被加入到当前源文件的符号表中__Vectors DCD __initial_sp ; Top of StackDCD Reset_Handler ; Reset HandlerDCD NMI_Handler ; NMI Handler(责任编辑:admin)STM32 启动文件解析!(2)时间:2010-05-02 10:41来源:作者:点击:80次DCD HardFault_Handler ; Hard Fault Handler DCD MemManage_Handler ; MPU Fault Handler DCD BusFault_Handler ; Bus Fault Handler DCD UsageFault_Handler ; Usage Fault Handler DCD 0 ; Reserved DCD 0 ; ReseDCD HardFault_Handler ; Hard Fault HandlerDCD MemManage_Handler ; MPU Fault HandlerDCD BusFault_Handler ; Bus Fault HandlerDCD UsageFault_Handler ; Usage Fault HandlerDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD SVC_Handler ; SVCall HandlerDCD DebugMon_Handler ; Debug Monitor HandlerDCD 0 ; ReservedDCD PendSV_Handler ; PendSV HandlerDCD SysTick_Handler ; SysTick Handler; External InterruptsDCD WWDG_IRQHandler ; Window WatchdogDCD PVD_IRQHandler ; PVD through EXTI Line detectDCD TAMPER_IRQHandler ; TamperDCD RTC_IRQHandler ; RTCDCD FLASH_IRQHandler ; FlashDCD RCC_IRQHandler ; RCCDCD EXTI0_IRQHandler ; EXTI Line 0DCD EXTI1_IRQHandler ; EXTI Line 1DCD EXTI2_IRQHandler ; EXTI Line 2DCD EXTI3_IRQHandler ; EXTI Line 3DCD EXTI4_IRQHandler ; EXTI Line 4DCD DMAChannel1_IRQHandler ; DMA Channel 1DCD DMAChannel2_IRQHandler ; DMA Channel 2DCD DMAChannel3_IRQHandler ; DMA Channel 3DCD DMAChannel4_IRQHandler ; DMA Channel 4(责任编辑:admin)STM32 启动文件解析!(3)时间:2010-05-02 10:41来源:作者:点击:80次DCD DMAChannel5_IRQHandler ; DMA Channel 5 DCD DMAChannel6_IRQHandler ; DMA Channel 6 DCD DMAChannel7_IRQHandler ; DMA Channel 7 DCD ADC_IRQHandler ; ADC DCD USB_HP_CAN_TX_IRQHandler; USB High PrioritDCD DMAChannel5_IRQHandler ; DMA Channel 5DCD DMAChannel6_IRQHandler ; DMA Channel 6DCD DMAChannel7_IRQHandler ; DMA Channel 7DCD ADC_IRQHandler ; ADCDCD USB_HP_CAN_TX_IRQHandler ; USB High Priority or CAN TXDCD USB_LP_CAN_RX0_IRQHandler ; USB Low Priority or CAN RX0DCD CAN_RX1_IRQHandler ; CAN RX1DCD CAN_SCE_IRQHandler ; CAN SCEDCD EXTI9_5_IRQHandler ; EXTI Line 9..5DCD TIM1_BRK_IRQHandler ; TIM1 BreakDCD TIM1_UP_IRQHandler ; TIM1 UpdateDCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and CommutationDCD TIM1_CC_IRQHandler ; TIM1 Capture CompareDCD TIM2_IRQHandler ; TIM2DCD TIM3_IRQHandler ; TIM3DCD TIM4_IRQHandler ; TIM4DCD I2C1_EV_IRQHandler ; I2C1 EventDCD I2C1_ER_IRQHandler ; I2C1 ErrorDCD I2C2_EV_IRQHandler ; I2C2 EventDCD I2C2_ER_IRQHandler ; I2C2 ErrorDCD SPI1_IRQHandler ; SPI1DCD SPI2_IRQHandler ; SPI2DCD USART1_IRQHandler ; USART1DCD USART2_IRQHandler ; USART2DCD USART3_IRQHandler ; USART3DCD EXTI15_10_IRQHandler ; EXTI Line 15..10DCD RTCAlarm_IRQHandler ; RTC Alarm through EXTI LineDCD USBWakeUp_IRQHandler ; USB Wakeup from suspendAREA |.text|, CODE, READONLY; Reset Handler;利用PROC、ENDP这一对伪指令把程序段分为若干个过程,使程序的结构加清晰(责任编辑:admin)STM32 启动文件解析!(4)时间:2010-05-02 10:41来源:作者:点击:80次Reset_Handler PROC ;过程的开始EXPORTReset_Handler [WEAK] IMPORT__main LDR R0, =__main BX R0 ENDP ;过程的结束; Dummy Exception Handlers (infinite loops which can be modified) NMI_Handler PRReset_Handler PROC ;过程的开始EXPORT Reset_Handler [WEAK]IMPORT __mainLDR R0, =__mainBX R0ENDP ;过程的结束; Dummy Exception Handlers (infinite loops which can be modified)NMI_Handler PROCEXPORT NMI_Handler [WEAK]B .ENDPHardFault_HandlerPROCEXPORT HardFault_Handler [WEAK]B .ENDPMemManage_HandlerPROCEXPORT MemManage_Handler [WEAK]B .ENDPBusFault_HandlerPROCEXPORT BusFault_Handler [WEAK]B .ENDPUsageFault_HandlerPROCEXPORT UsageFault_Handler [WEAK]B .ENDPSVC_Handler PROCEXPORT SVC_Handler [WEAK]B .ENDPDebugMon_HandlerPROCEXPORT DebugMon_Handler [WEAK]B .ENDPPendSV_Handler PROCEXPORT PendSV_Handler [WEAK]B .ENDPSysTick_Handler PROCEXPORT SysTick_Handler [WEAK]B .ENDPDefault_Handler PROCEXPORT WWDG_IRQHandler [WEAK]EXPORT PVD_IRQHandler [WEAK]EXPORT TAMPER_IRQHandler [WEAK](责任编辑:admin)STM32 启动文件解析!(5)时间:2010-05-02 10:41来源:作者:点击:80次EXPORTRTC_IRQHandler [WEAK] EXPORTFLASH_IRQHandler [WEAK] EXPORTRCC_IRQHandler [WEAK] EXPORTEXTI0_IRQHandler [WEAK] EXPORTEXTI1_IRQHandler [WEAK] EXPORTEXTI2_IRQHandler [WEAK] EXPORTEXTI3_IRQHandler [EXPORT RTC_IRQHandler [WEAK]EXPORT FLASH_IRQHandler [WEAK]EXPORT EXTI0_IRQHandler [WEAK]EXPORT EXTI1_IRQHandler [WEAK]EXPORT EXTI2_IRQHandler [WEAK]EXPORT EXTI3_IRQHandler [WEAK]EXPORT EXTI4_IRQHandler [WEAK]EXPORT DMAChannel1_IRQHandler [WEAK]EXPORT DMAChannel2_IRQHandler [WEAK]EXPORT DMAChannel3_IRQHandler [WEAK]EXPORT DMAChannel4_IRQHandler [WEAK]EXPORT DMAChannel5_IRQHandler [WEAK]EXPORT DMAChannel6_IRQHandler [WEAK]EXPORT DMAChannel7_IRQHandler [WEAK]EXPORT ADC_IRQHandler [WEAK]EXPORT USB_HP_CAN_TX_IRQHandler [WEAK]EXPORT USB_LP_CAN_RX0_IRQHandler [WEAK]EXPORT CAN_RX1_IRQHandler [WEAK]EXPORT CAN_SCE_IRQHandler [WEAK]EXPORT EXTI9_5_IRQHandler [WEAK]EXPORT TIM1_BRK_IRQHandler [WEAK]EXPORT TIM1_UP_IRQHandler [WEAK]EXPORT TIM1_TRG_COM_IRQHandler [WEAK]EXPORT TIM1_CC_IRQHandler [WEAK]EXPORT TIM2_IRQHandler [WEAK]EXPORT TIM3_IRQHandler [WEAK]EXPORT TIM4_IRQHandler [WEAK]EXPORT I2C1_EV_IRQHandler [WEAK]EXPORT I2C1_ER_IRQHandler [WEAK]EXPORT I2C2_EV_IRQHandler [WEAK]EXPORT I2C2_ER_IRQHandler [WEAK]EXPORT SPI1_IRQHandler [WEAK]EXPORT SPI2_IRQHandler [WEAK]EXPORT USART1_IRQHandler [WEAK](责任编辑:admin)STM32 启动文件解析!(6)时间:2010-05-02 10:41来源:作者:点击:80次EXPORTUSART2_IRQHandler [WEAK] EXPORTUSART3_IRQHandler [WEAK] EXPORTEXTI15_10_IRQHandler [WEAK] EXPORTRTCAlarm_IRQHandler [WEAK] EXPORTUSBWakeUp_IRQHandler [WEAK] WWDG_IRQHandler PVD_IRQHandler TAMPEREXPORT USART2_IRQHandler [WEAK]EXPORT USART3_IRQHandler [WEAK]EXPORT RTCAlarm_IRQHandler [WEAK]EXPORT USBWakeUp_IRQHandler [WEAK] WWDG_IRQHandlerPVD_IRQHandlerTAMPER_IRQHandlerRTC_IRQHandlerFLASH_IRQHandlerRCC_IRQHandlerEXTI0_IRQHandlerEXTI1_IRQHandlerEXTI2_IRQHandlerEXTI3_IRQHandlerEXTI4_IRQHandlerDMAChannel1_IRQHandlerDMAChannel2_IRQHandlerDMAChannel3_IRQHandlerDMAChannel4_IRQHandlerDMAChannel5_IRQHandlerDMAChannel6_IRQHandlerDMAChannel7_IRQHandlerADC_IRQHandlerUSB_HP_CAN_TX_IRQHandlerUSB_LP_CAN_RX0_IRQHandlerCAN_RX1_IRQHandlerCAN_SCE_IRQHandlerEXTI9_5_IRQHandlerTIM1_BRK_IRQHandlerTIM1_UP_IRQHandlerTIM1_TRG_COM_IRQHandlerTIM1_CC_IRQHandlerTIM2_IRQHandlerTIM3_IRQHandlerTIM4_IRQHandlerI2C1_EV_IRQHandlerI2C1_ER_IRQHandlerI2C2_EV_IRQHandlerI2C2_ER_IRQHandlerSPI1_IRQHandlerSPI2_IRQHandlerUSART1_IRQHandlerUSART2_IRQHandlerUSART3_IRQHandlerEXTI15_10_IRQHandlerRTCAlarm_IRQHandlerUSBWakeUp_IRQHandlerB .ENDPALIGN; User Initial Stack & HeapIF :DEF:__MICROLIBEXPORT __initial_spEXPORT __heap_baseEXPORT __heap_limitELSEIMPORT __use_two_region_memoryEXPORT __user_initial_stackheap__user_initial_stackheapLDR R0, = Heap_MemLDR R1, =(Stack_Mem + Stack_Size)LDR R2, = (Heap_Mem + Heap_Size)LDR R3, = Stack_MemBX LRALIGNENDIFEND(责任编辑:admin)。