最新机构运动简图及分析
机构及机构运动简图
• 两构件之间构成多个运动副时
• 两构件某两点之间的距离在运动过程中始终保持不 变时
• 联接构件与被联接构件上联接点的轨迹重合时
• 机构中对运动不起作用的对称部分
– 虚约束的处理方法
• 计算自由度时将虚约束排除
– 虚约束的作用
• 改善构件的受力情况
6/5/2020 4:1•4 A传M 递较大功率 机械基础——第一章
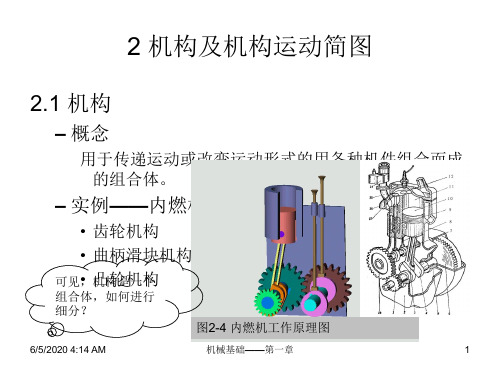
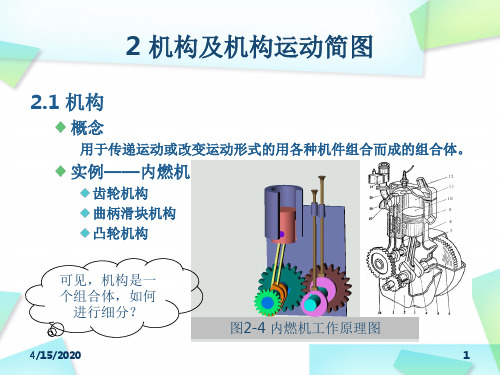
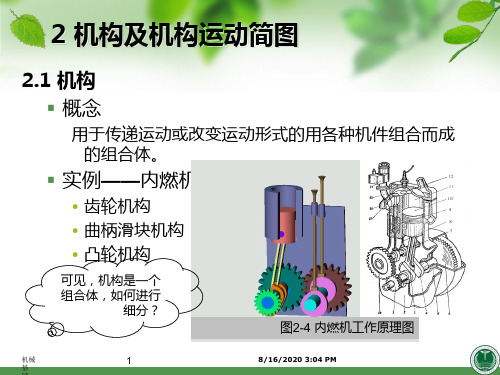
– 实例一——内燃机
+
6/5/2020 4:14 AM
6
+
5'
6
= 5'
5
机械基础——第一章
1
2
1
3
4' 4
15
2 机构及机构运动简图
2.4 平面机构运动简图
– 实例二——颚式破碎机
1. 机架 2. 偏心轴
5. 带轮
3. 动颚板
6/5/2020 4:14 AM
4.肘板机械基础——第一章
16
2 机构及机构运动简图
能量转换
机械
总称
运动单元 固定件:机架
制造单元
原动件:主动件
从动件:随原动件运动的其余构件
– 机构中构件的分类 6/5/2020 4:14 AM
机械基础——第一章
4
2 机构及机构运动简图
2.3 运动副
– 构件的自由度
构件所具有的独立运动的数目(或确定构件位置的 独立参变量的数目)
– 一个作平面运动的自由构件具有 三个独立运动数
D5
F n= 7
46 1E 7 C
PL= 6 PH= 0
因为存在复 合铰链!!
2
3
B
8A
F=3n - 2PL - PH =9
机构运动简图测绘与分析实验
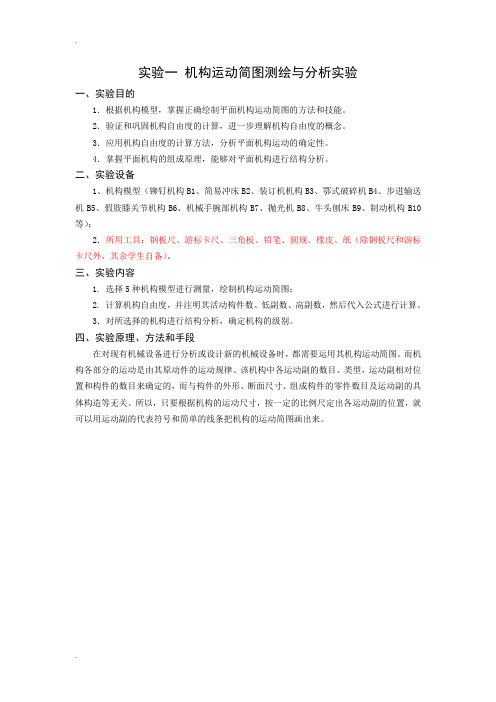
实验一机构运动简图测绘与分析实验一、实验目的1.根据机构模型,掌握正确绘制平面机构运动简图的方法和技能。
2.验证和巩固机构自由度的计算,进一步理解机构自由度的概念。
3.应用机构自由度的计算方法,分析平面机构运动的确定性。
4.掌握平面机构的组成原理,能够对平面机构进行结构分析。
二、实验设备1、机构模型(铆钉机构B1、简易冲床B2、装订机机构B3、鄂式破碎机B4、步进输送机B5、假肢膝关节机构B6、机械手腕部机构B7、抛光机B8、牛头刨床B9、制动机构B10等);2.所用工具:钢板尺、游标卡尺、三角板、铅笔、圆规、橡皮、纸(除钢板尺和游标卡尺外,其余学生自备)。
三、实验内容1. 选择5种机构模型进行测量,绘制机构运动简图;2. 计算机构自由度,并注明其活动构件数、低副数、高副数,然后代入公式进行计算。
3.对所选择的机构进行结构分析,确定机构的级别。
四、实验原理、方法和手段在对现有机械设备进行分析或设计新的机械设备时,都需要运用其机构运动简图。
而机构各部分的运动是由其原动件的运动规律、该机构中各运动副的数目、类型,运动副相对位置和构件的数目来确定的,而与构件的外形、断面尺寸、组成构件的零件数目及运动副的具体构造等无关。
所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图画出来。
常用符号见下表:1、机构运动简图的概念抛开构件的复杂外形和运动副的具体结构,利用简单的线条和规定的符号来代表每一个构件和运动副,并按一定的比例将机构的运动特征表达出来的简单图形称为机构运动简图。
机构运动简图与原机构具有完全相同的运动特性,因而可以根据该图对机构进行运动分析和动力分析。
2、测绘方法(1)分析运动情况。
绘制机构运动简图时,首先要把该机器或模型的实际构造和运动情况搞清楚。
为此,先应确定出原动件和从动件,再使被测机器或模型缓慢运动,然后按照运动的传递路线,把原动件和从动件之间的各构件的运动情况观察清楚,尤其应注意有微小运动的构件,分清各构件间的接触情况及相对运动的性质,从而确定组成机构的运动构件数目、联接次序和运动副数目、种类等。
机构及机构运动简图
D C
4.肘板
D
C
1
17
2 机构及机构运动简图
2.4 平面机构运动简图
思考——如图所示的破碎机应如何绘制运动简图??
A B
E
4/15/2020
DC
FG
18
2 机构及机构运动简图
2.4 平面机构运动简图
练习
4/15/2020
19
练习1解答
3
C23 4
2
B12
1
A14
C234
3
2
4
B12
1
4
A14
低副约束数
3×n
2 × PL
=>
F=3n-2PL-PH
高副约束数 1 × Ph
4/15/2020
21
2 机构及机构运动简图
2.4 平面机构的自由度
实例一:铰链四杆机构
n=3 pL=4 ph=0 F=3n-2pL-ph=1
4/15/2020
22
2 机构及机构运动简图
2.4 平面机构的自由度
实例二——颚式破碎机
2
=-1 错!
1
实际自由度 为1,为什
么??
存在虚约束!!
4/15/2020
32
2 机构及机构运动简图
2.4 平面机构的自由度
虚约束定义
对机构的运动实际不起作用的约束
B 2E
C
1
4
3
A
F
D
3 2
1
A
B
4/15/2020
33
2 机构及机构运动简图
2.4 平面机构的自由度
虚约束出现场合
两构件之间构成多个运动副时 两构件某两点之间的距离在运动过程中始终保持不变时 联接构件与被联接构件上联接点的轨迹重合时 机构中对运动不起作用的对称部分
机构及机构运动简图
每一个单独加工的单元体(独立的加工单元)
▪ 构件
• 有相对运动的各个单元体(独立的运动单元)。可以是 单一的零件,也可以是多个零件固联成的内部没有相 对运动的刚性结构。
• 特点
– 不同构件间有相对运动 – 单一构件内部没有相对运动 – 可以是单一零件(如曲轴),也可以是多个零件组成(如
连杆)
机械
2
基
8/16/2020 3:04 PM
2 机构及机构运动简图
2.2 零件与构件
螺栓 垫圈 螺母
套 筒
连杆体 轴瓦
实体
机械
3
基
连杆盖 零件
8/16/2020 3:04 PM
构件
2 机构及机构运动简图
2.2 零件与构件 ▪ 零件、构件、机构与机器的联系
机器
一个或多个
做功或实现 能量转换
机构
确定的 相对运动
刚性联结 构件
零件
机械 总称
▪ 机构中构件的分类
运动单元
制造单元
固定件:机架 原动件:主动件 从动件:随原动件运动的其余构件
机械
4
基
8/16/2020 3:04 PM
2 机构及机构运动简图
2.3 运动副
▪ 构件的自由度
构件所具有的独立运动的数目(或确定构件位置的 独立参变量的数目)
▪ 一个作平面运动的自由构件具有 三个独立运动数
▪ 运动副
• 使构件直接接触又能保持一定形式的相对运动的连接
点接触——高副(1个约束,2个自由度)
• 按接触方式分类 线接触——高副(1个约束,2个自由度)
面接触——低副(2个约束,1个自由度)
机械
6
基
第2章--机构运动简图

C: 复合铰链 M 和 N 、 E 虚约束 和F: G: 局部自由度
小结:
1、运动副的定义和分类 运动副:由两构件直接接触形成的可动联接
分类:高副(点或线接触的运动副)和低副(面接触的运动副)
2、能绘制机构运动简图 3、重点掌握平面机构的自由度计算及注意事项,明确复合铰链 局部自由度、虚约束等
1)平面机构自由度的计算公式: F 3n 2PL PH
F 3n 2PL PH 34 24 2
2
n7 PL 10 PH 0
F 3n 2PL PH 3 7 210 0
1
n4 PL 4 PH 2
F 3n 2PL PH 34 24 2
2
n7 PL 10 PH 0
F 3n 2PL PH 3 7 210 0
1
n9
用图形符号表示高副时,一 般需把两构件在接触点处的 曲线轮廓画出(图a),但对于 齿轮机构,习惯上只画出两 齿轮的节圆(见表1-1)。
二、 构件的分类及其表示符号
1. 构件的分类
机 架 —机构中的固定构件; 支撑活动件,只有一个
原动件 主动件
—按给定已知运动规律独立运 动的构件;一般机构有一个
常在其上给出表示其运动形式 的箭头。
1)平行四边形结构
A
2)两构件之间构成多个转动轴线 重合的转动副;
3)两构件之间构成多个导路平行 的移动副;
虚约束常出现在下列场合:
1)平行四边形结构 2)两构件之间构成多个转动轴线重合的转动副; 3)两构件之间构成多个导路平行的移动副;
4)机构中对传递运动不起独立作用的对称部分
5)两构件多点接触形成平面高副,
5、给各构件和运动副编号,并在 原动件上用箭头表示其运动形式和 方向
机构运动简图及平面机构自由度

3、从动件:随着原动件运动的其余活动构件
注意:任何一个机构中,必有一个构件被当作相对固定的固定件,而在
活动构件中必须有一个或几个是原动件,其余的都是从动件。
机构运动简图及平面机构自由度
§2 机构运动简图
6
为了便于分析研究 —→ 复杂的机械(如图a) —→ 简单的线条和规定 的符号(保持特征不变)—→ 机械运动简图(如图b)
或:将a)图等效为b)图:
F = 3n - 2PL - PH = 3×2 - 2×2 - 1 = 1 故:通常在计算具有局部自由度的机构自由度数目时: a)F = 3n - 2PL - PH - 局部自由度; b)作出等效图后,按常规方法计算 F = 3n - 2PL - PH 。
机构运动简图及平面机构自由度 18
b): F 3 3 2 4 0 1
c): F 3 2 2 2 1 1 d): F 3 4 2 5 0 2 e): F 3 2 2 3 6
机构具有确定相对运动(运动链成为具有确定相对运动的机构)的 必要条件为: 1)运动链的自由度数目必须大于零; 2)主动构件数目等于运动链的自由度数目。 二、计算平面机构自由度时应注意的问题 1、复合铰链:三个或三个以上的构件在同一轴线上用回转副联接。 如图示: F = 3n - 2PL - PH
§3 平面机构自由度的计算
一、平面机构自由度的计算公式
F 3 n 2PL PH
式中:n — 活动(运动)构件数;n = N - 1,N — 总构件数(包括
固定件); PL — 低副的数目;PH — 高副的数目。 由公式知: 机构的自由度 F 取决于活动构件的数目以及运动副的性质( PL 或 PH ) 和数目。 注意:
机构运动简图提示与参考
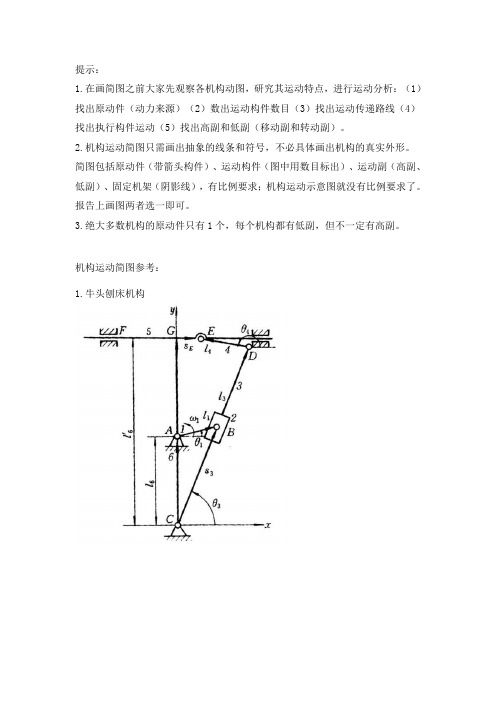
提示:
1.在画简图之前大家先观察各机构动图,研究其运动特点,进行运动分析:(1)找出原动件(动力来源)(2)数出运动构件数目(3)找出运动传递路线(4)找出执行构件运动(5)找出高副和低副(移动副和转动副)。
2.机构运动简图只需画出抽象的线条和符号,不必具体画出机构的真实外形。
简图包括原动件(带箭头构件)、运动构件(图中用数目标出)、运动副(高副、低副)、固定机架(阴影线),有比例要求;机构运动示意图就没有比例要求了。
报告上画图两者选一即可。
3.绝大多数机构的原动件只有1个,每个机构都有低副,但不一定有高副。
机构运动简图参考:
1.牛头刨床机构
或
2.曲柄滑块机构
3.抽水唧筒机构
4.
5.正弦机构或偏心轮机构(自己思考)。
第3章平面机构运动简图及自由度ppt课件
的移动副时,只有一
3
个移动副起作用,其
3
余都是虚约束。如图
的缝纫机引线机构中,
2
装针杆3在A、B处分
2
别与机架组成导路重
合的移动副。计算机
构自由度时只能算一
B
个移动副,另一个为
虚约束。
图3-14
(2)两个构件之间组成多个轴线重合的回转副时, 只有一个回转副起作用,其余都是虚约束。如图3-15所 示,两个轴承支撑一根轴,只能看作一个回转副。
它可表达为在直角坐标系内沿着三个坐标轴的移
动和绕三个坐标轴的转动。
y
而对于一个作平
面运动的构件,则只 有三个自由度,如图
1 x
3-7所示。即沿x 轴和y
轴移动,以及在 Oxy
平面内的转动。
y
o
图3-7
x
3.3.1 平面机构自由度计算公式
一个作平面运动的自由构件有三个自由度。当两个构 件组成运动副之后,它们的相对运动就受到约束,使 得某些独立的相对运动受到限制。对独立的相对运动 的限制,称为约束。约束增多,自由度就相应减少。 由于不同种类的运动副引入的约束不同,所以保留的 自由度也不同。
2
4 1
3
5 图3-11c
因此,机构具有确定运动的条件是:
机构自由度必须大于零,且原动件数与其自由度 必须相等。
3.3.3 计算平面机构自由度的注意事项
1.复合铰链 -两个以上构件组成两个或更多个共轴线
的转动副。
如图3-12(a),三个构件在A处构成复合铰链。由
其侧视图(b)可知,此三构件共组成两个共轴线转动副。
第3章 平面机构运动简图 及自由度
3.1 运动副 3.2 平面运动机构简图 3.3 平面机构的自由度
机构运动简图的测绘和分析

渐开线齿轮参数测定实验报告
班级学号 实验日期 指导教师
(一) 实验数据及目
1
2
3
da 测
df
量 H1
H2 数D
据 Wk Wk+1
计 Pb
渐开线齿轮参数测量
一、实验目的 1.掌握渐开线直齿圆柱齿轮基本参数的测量方法。 2.加深巩固齿轮参数之间的相互关系和渐开线性质的知识。
二、实验原理 利用游标卡尺测量齿轮的公法线长度 Wk 及 Wk+1 ,齿轮的顶圆直径 da,根圆直径 df,根据这
些数据并运用一些基本公式去推求齿轮的基本参数(m、z、α、h*a、C*)。 1.测量公法线长度 Wk 及 Wk+1 求出 m、α。
在切制标准齿轮时,将刀具中线调节至与被加工齿轮分度圆相切的位置;当切制变位齿 轮时,应重新调整刀具中线的位置,使刀具中线与齿轮的分度圆之间的距离为变位量 xm 的
值(x 变位系数),这样切出的齿轮就是变位齿轮。齿条插刀的参数为:压力角 a =20°,
模数 m=20mm。
四、实验步骤
1.计算所加工的标准齿轮和变位齿轮的各种参数填入下表。
a=22 .5° 2.902 3.071 3.352 3.628 3.686 4.095 4.354 4.609 5.079 5.265 5.805 6.144 6.530 6.702 7.256 7.372 7.982 8.191 8.707 9.215 9.433 10.159 10.533 10.884 11.610 12.286 13.061 14.512 14.744
机构运动简图的测绘和分析的实验报告

实验一机构运动简图的测绘和分析一、实验目的1.学会根据各种机械实物或模型,绘制机构运动简图。
2.分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法。
二、实验设备和工具1.各类典型机械的实物或模型,量具。
2.铅笔、橡皮、草稿纸等(学生自备)。
三、实验原理和方法1.原理由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(见教科书或机械设计手册中有关“常用构件和运动副简图符号”的规定)来代表构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
表1—1为常用符号示例。
2.方法(1)使被测绘的机构缓慢地运动,从原动构件开始仔细观察机构的运动,分清各个运动单元,从而确定组成机构的构件数目。
(2)根据相互连接的两构件间的接触情况及相对运动的特点,确定各个运动副的种类。
(3)在草稿纸上徒手按规定的符号及构件的连接次序,从原动构件开始,逐步画出机构运动简图的草图。
用数字1、2、3…分别标注各构件,用拉丁字母A、B、C…分别标注各运动副。
(4)仔细测量与机构运动有关的尺寸,如转动副间的中心距和移动副导路的方向等,选定原动件的位置,并按一定的比例尺画成正式的机构运动简图。
对绘制指定的几种机构模型的机构运动简图,其中至少要有一种按确定的比例尺绘制,其余的可凭目测,使图与实物大致成比例,这种不按比例尺绘制的简图通常称为机构示意图。
(5)计算机构自由度数,并将结果与实际机构的自由度相验证。
五、思考题1.机构运动简图应准确表达机构的哪些内容、而简化表达哪些内容?2.绘制机构运动简图时,原动件的位置可以任意选定吗?会不会影响简图的正确性?3.机构自由度的计算对测绘机构运动简图有何帮助?表1—1 机构运动简图中常用的运动副和构件符号()()mm m AB l AB l 图上长度实际长度比例尺=μ机械原理实验报告一、测绘和分析计算二、思考题讨论。
机构运动简图的测绘与分析(实验报告)

机构运动简图的测绘与分析实验指导书及实验报告班级姓名时间学号一、实验目的:1、根据各种机械实物或模型,绘制机构运动简图;2、学会分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法;3、加深对机构结构分析的了解。
二、实验设备和工具;1、缝纫机头;2.学生自带三角板、铅笔、橡皮;三、实验原理:由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略符号(见教科书有关“常用构件和运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。
四、实验要求:l、对要测绘的缝纫机头中四个机构即a.压布、b走针、c.摆梭,只绘出机构示意图即可,所谓机构运动示意图是指只凭目测,使图与实物成比例,不按比例尺绘制的简图;2、计算每个机构的机构自由度,并将结果与实际机构的自由度相对照,观察计算结果与实际是否相符;五、实验方法及步骤:l、测绘时使被测绘的机械缓慢地运动,从原动件开始,仔细观察机构的运动,分清各个运动单元,从而确定组成机构的构件数目;2、根据相联接的两构件的接触特征及相对运动的性质,确定各个运动副的种类;3、选定投影面,即多数构件运动的平面,在草稿纸上徒手按规定的符号及构件的连接次序,从原动件开始,逐步画出机构运动简图。
用数字1、2、3、……。
分别标注各构件,用英文字母A、B、C、,…分别标注各运动副;4、仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动副导路的方向等,选定原动件的位置,并按一定的比例画出正式的机构运动简图。
六、实验分析、结果:七、思考题:1、一个正确的机构运动简图应能说明哪些内容?2、机构自由度的计算对测绘机构运动简图有何帮助?。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2、常用运动副及构件的表示方法
常见运动副符号的表示: 国标GB4460-84
运动副 名称
常用运动副的符号 运动副符号
两运动构件构成的运动副 两构件之一为固定时的运动副
2 转
2
动
平副 1
1
面
运
动
2
副移
动
1
副
2
1
2
2
1
1
2
1 2 1
22
22
1
1
1
1
2
2
1 2 1
1 2
1
平
面
2
高
副
齿 轮 齿 条 传 动
圆
带
锥
传
齿
动
轮
传
动
链 传 动
外啮 合圆 柱齿 轮传 动
圆柱 蜗杆 蜗轮 传动
凸 轮 传 动
内啮
棘
合圆
轮
柱齿
机
轮传
构
动
机构运动简图应满足的条件: 1).构件数目与实际相同
2).运动副的性质、数目与实际相符
3).运动副之间的相对位置以及构件尺寸与实际机构 成比例。
3. 绘制机构运动简图的步骤
1
2
螺
旋
1
空副 2
间
1
运
动球 副面
1
副
球 销
2
副
2 1
2 1
1
2
2 1
2 1
1 2
1 2
1 2
2 1
构件的表示方法:
一般构件的表示方法
杆、轴构件 固定构件 同一构件
一般构件的表示方法
两副构件 三副构件
注意事项:
画构件时应撇开构件的实际外形,而只考虑运动副 的性质。
常用机构运动简图符号
在 机 架 上 的 电 机
出料口
进料口
出料口
进料口
出料口
进料口
出料口
进料口
出料口
进料口
出料口
进料口
出料口
进出料口
进料口
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好!谢谢
1)构件及其成副分析: 分析机构的构件个数;那些构件 之间成副关系,确定运动副的类型和数量。
2)机构运动尺寸的测绘:测量出运动副间相对位置尺寸
3)选择合适的比例尺μl 和恰当的视图 μl =实际尺寸 m /
图上长度mm
4)先确定基架位置,然后用规定的符号从原动件开始, 沿传递路线依次绘出机构的运动简图。最后标出运动 副的符号和用箭头标出原动件。
四 . 举例:绘制破碎机和偏心泵的机构运动简图。
1、绘制图示鳄式破碎机的运动简图。
2A 1 B
3 D
C4
自由度计算:
F3n(2pl php)F 33(2400)0 1
曲柄存在条件验证:1)杆长条件; 2)机架位置。
2、绘制图示偏心泵的运动简图
3C 2 A1 B 4
偏心泵
自由度计算:
F3n(2pl php)F 33(2400)0 1