手机摄像模组基本知识讲解PPT课件
合集下载
手机摄像头Camera专题介绍 ppt课件
ppt课件
12
ppt课件
13
ppt课件
左图为0.6秒 的慢速快门 拍摄,可将 夜幕下的车 灯拉成线状, 不过慢速快 门一般最好 有三角架, 或者可以找 到支撑的地 方,否则该 清楚的地方 也会模糊
14
传感器:即感光元件CCD或CMOS。 CCD就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想 象成一颗颗微小的感应粒子,铺满在光学镜头后方,当光线与图像从镜头透过、投 射到CCD表面产生电流,将感应到的内容转换成数码资料储存起来。CCD像素数目越 多、单一像素尺寸越大,收集到的图像就会越清晰。 CMOS则是金属氧化物半导体组件,它和CCD一样负责将光线转变成电荷。只是工艺 不同。目前手机摄像头几乎全部使用CMOS传感器。
Camera专题介绍
ppt课件
1
目录
●典型结构和工作原理 ●摄像头参数与成像效果
ppt课件
2
●典型结构工作原理
ppt课件
Hale Waihona Puke 3ppt课件4
ppt课件
5
模组拆解:
ppt课件
6
镜头:
理论上,镜头可以只由一个镜片组成,但由于光学原因,单个镜片的 成像不可避免的存在色差、球差、彗差、像散等等一些列像差问题,尤其 在边缘部分,成像很差。多个镜片的组合可以在一定程度上校正像差。
ppt课件
15
传 感 器 芯 片 内 部 结 构 原 理 图
ppt课件
16
但,CMOS具有便于大规模生产,且速度快、成本较低、体积小、功耗低,对
于手机这样的产品来说,CMOS是更好的选择,成像方面,CMOS和CCD的差
距也越来越小
ppt课件
17
手机摄影技巧ppt完整版

流等场景
创意构图思路拓展
打破常规
尝试不同的角度、视角和构图 方式,创造独特的视觉效果
捕捉瞬间
关注生活中的美好瞬间,用手 机记录下来,展现真实、自然 的情感
运用后期处理
通过裁剪、调色、滤镜等后期 处理手段,优化照片效果,提 升艺术感
创意组合
将多张照片通过拼接、叠加等 方式组合在一起,形成有趣、
富有想象力的画面
围和视觉效果。
局部影调调整
利用手机摄影软件中的局部调整 工具,对画面中的特定区域进行 影调调整,以突出主体或营造特
定的光影效果。
光线与影调在作品中表现
塑造形象
光线和影调是塑造物体形象的关键因素。通过合理运用光线和影调,可以突出物体的轮廓 、质感和立体感,使画面更加生动和具有感染力。
营造氛围
不同的光线和影调可以营造出不同的氛围和情感。例如,柔和的光线可以营造出温馨、浪 漫的氛围,而强烈的光线对比则可以营造出紧张、激烈的氛围。
作品呈现雨后地面上的积水与周围景 物的倒影,构图独特,色彩清新,展 现了摄影师对生活的细致观察和独特 视角。
手机摄影评价标准探讨
01
主题明确
好的手机摄影作品应具有鲜明的 主题,能够引发观者的共鸣和思
考。
03
技术精湛
优秀的手机摄影作品应具备良好 的曝光、对焦、色彩等技术指标 ,能够准确还原现场光影效果。
表达主题
光线和影调还可以用来表达作品的主题和情感。例如,在拍摄人像时,可以利用柔和的侧 光来表现人物的柔美和细腻;在拍摄风景时,可以利用清晨或黄昏时的暖色调来表现大自 然的宁静和美丽。
04
色彩搭配与后期处理
色彩基础知识回顾
01
02
03
三原色
创意构图思路拓展
打破常规
尝试不同的角度、视角和构图 方式,创造独特的视觉效果
捕捉瞬间
关注生活中的美好瞬间,用手 机记录下来,展现真实、自然 的情感
运用后期处理
通过裁剪、调色、滤镜等后期 处理手段,优化照片效果,提 升艺术感
创意组合
将多张照片通过拼接、叠加等 方式组合在一起,形成有趣、
富有想象力的画面
围和视觉效果。
局部影调调整
利用手机摄影软件中的局部调整 工具,对画面中的特定区域进行 影调调整,以突出主体或营造特
定的光影效果。
光线与影调在作品中表现
塑造形象
光线和影调是塑造物体形象的关键因素。通过合理运用光线和影调,可以突出物体的轮廓 、质感和立体感,使画面更加生动和具有感染力。
营造氛围
不同的光线和影调可以营造出不同的氛围和情感。例如,柔和的光线可以营造出温馨、浪 漫的氛围,而强烈的光线对比则可以营造出紧张、激烈的氛围。
作品呈现雨后地面上的积水与周围景 物的倒影,构图独特,色彩清新,展 现了摄影师对生活的细致观察和独特 视角。
手机摄影评价标准探讨
01
主题明确
好的手机摄影作品应具有鲜明的 主题,能够引发观者的共鸣和思
考。
03
技术精湛
优秀的手机摄影作品应具备良好 的曝光、对焦、色彩等技术指标 ,能够准确还原现场光影效果。
表达主题
光线和影调还可以用来表达作品的主题和情感。例如,在拍摄人像时,可以利用柔和的侧 光来表现人物的柔美和细腻;在拍摄风景时,可以利用清晨或黄昏时的暖色调来表现大自 然的宁静和美丽。
04
色彩搭配与后期处理
色彩基础知识回顾
01
02
03
三原色
手机摄像模组基本知识讲解(课堂PPT)
阻值
马达的正极和负极之间的电阻值
tilt
马达在静止或运动.的过程中,出现倾斜和偏移现象
18
Sensor简介
Sensor:图像传感器,又称芯片、晶圆、Wafer。是感光元器件,主要作用 是将光信号转换为电信号。主要分为CCD和CMOS两种。
CMOS Sensor根据其封装 方式可以分为CSP、COB 两种结构。
印刷QC
T
阶
贴片
段
炉前QC
回流焊
炉后QC
PQC
百级 组装 阶段 (百 级无 尘车 间)
固化后检查 热固化
镜头搭载 画胶
SMT板清洁 镜头清洁
千级 检测 阶段 (千 级无 尘车 间)
.
分粒 振动 调焦 点螺纹胶 UV固化 功能FQC 外观FQC
OQC 贴膜
OQC
包装
OQA出货
8
2、COB/COF工艺流程
贴板
锡膏印刷
S
M
印刷QC
T
阶
贴片
段
炉前QC
回流焊
炉后QC
PQC
烘烤后检查
百级 组装 阶段 (百 级无 尘车 间)
烘烤 H/M W/B后清洗 W/B后检查
镜头清洁
W/B
Plasma Clean
Snap Cure
D/B SMT板清.洗
千级 检测 阶段 (千 级无 尘车 间)
分粒 振动 调焦 点螺纹胶 UV固化 功能FQC 外观FQC
OQC 贴膜
OQC
包装
OQA出货
9
3、AF模组工艺流程
SMT阶段(流程同上)
功测
点螺纹胶
百级 组装 阶段 (百 级无 尘车 间)
手机摄像模组基本知识讲解ppt课件

阻值
马达的正极和负极之间的电阻值
tilt
马达在静止或运动的过程中,出现倾斜和偏移现象
Sensor简介
Sensor:图像传感器,又称芯片、晶圆、Wafer。是感光元器件,主要作用 是将光信号转换为电信号。主要分为CCD和CMOS两种。
CMOS Sensor根据其封装方 式可以分为CSP、COB两种结 构。
结构:
动子部分:载体、线圈
定子部分:外壳、下载体、上簧片、 下簧片、
VCM结构详解
外壳
上簧片 磁铁
线圈
载体
下簧片
下载体
参数简介
名词
解释
行程
马达的最低的移动距离
起ቤተ መጻሕፍቲ ባይዱ电流
马达开始动作的需要最少驱动电流值
斜率
马达运动时,行成直线的斜率
回滞
同一电流值下,马达向上运动和向下运动时的行程差异
姿势差 VCM在水平、向上、向下三个方向运动时,同一电流下的行程差异
12结构13搭配5m15芯片镜片个数3p有效焦距光学总长ttl光圈fno视场角fov畸变distortion相对照度ri主光线角cra最大影像圆imc有无ir及ir规格镜筒材质底座材质扭力规格搭配的ir厚度参数简介14名词解释对模组的影响ttl光学总长影响模组的整体高度fov视场角在相同拍摄距离影像画面所能拍摄内容的多少fno光圈影像模组画面的明暗度尤其在暗环境下ri相对照度影像画面中心与边缘的明暗差异的大小distortion畸变拍摄物体会发生形状变化分枕形和桶形畸变cra主光线角与sensor偏差过大有偏色的风险imc最大影像圆影像圆过小会造成模组暗角ir滤光片主要影像杂光问题和解析力问题efl有效焦距主要用于一些相关理论知识的计算使用torque扭力主要影像调焦作业的效率composition镜片组合主要影影响镜头厂的制作工艺和价格15vcm原理
手机摄影摄像拍照技巧讲课PPT演示课件

实物拍摄
紫郁模板
紫郁模板
紫郁模板
紫郁模板
手机摄影摄像
——拍照是一种情怀
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
网格线的作用
网格线作用有很多,最简单的是控制照片的水平度,其次是可以通过 网格线来构图。
不同的参照线能拍摄不同风格的照片。
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
第四部分
曝光
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
第二部分
对焦
紫郁模板
紫郁模板
紫郁模板
紫郁模板
什么叫对焦?
对焦是指使用照相机时调整好 焦点距离
对焦也叫对光、聚焦。通过照 相机对焦机构与物距和相距的位 置,使被拍物成像清晰的过程就 是对焦。
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
第三部分
紫郁模板
紫郁模板
什么叫曝光? 曝光是指在摄影过程中
进入镜头照射在感光元件 上的光量,由光圈、快门、 感光度的组合来控制。
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
紫郁模板
”
摄影是一种情怀,不要介意他人的眼光,
或许现在未必流行,但是自己走过的就是
自己的道路。紫郁模板 Nhomakorabea紫郁模板
手机摄像模组基本知识优秀课件
SXGA 1/4 1005 20/24 1.8/2.5/3.3 15 YUV/RGB TBD
SXGA 1/5.5 905 20/24 2.5/3.0 15 YUV/RGB 80mW
UXGA 1/4 905 20/24 1.3/2.8/3.3 15 YUV/RGB 125mW
QXGA 1/3 905 20/24 1.8/2.8/3.3 15 RGB 110mW
。
手机摄像模组基本知识优秀课件
13
4. 模组生产相关技术及图纸
4.1.2 镜片材质
• 光学塑料
• 主要优点:1.非球面镜片的面型是由多项方程式决定的,其表面各点的半 径各不相同,在光学系统中引进非球面,可以校正球差、慧差、畸变、像 散等像差,使光学系统像质提高。
•
2.塑料非球面光学零件由于具有重量轻、成本低 、易于模压成型以
1.2 名词
FPC: Flexible Printed Circuit 可挠性印刷电路板
PCB: Printed Circuit Board印刷电路板
Sensor:图象传感器
IR:红外滤波片
Holder:基座
Lens:镜头
Capacitance : 电容
Glass:玻璃
Plastic:塑料
CCM:CMOS Camera Module
1.5 CCD和CMOS的区别
1.6.1 CCD(Charge Couple Device)
定义:即电荷耦合器件,它是目前比较成熟的成像器件,是以行为单位的电 流信号。传统彩色CCD感光单元及滤色镜的排列是方形的,以G-R-G-B型CCD 为例,可以简单理解为4个感光单元的中心点构成一个“像素点”,这样,每个 感光单元的光值都是复用的,使用了4次(边缘部位除外),每4个感光单 元计算出4个像素。
手机摄像头Camera专题介绍ppt课件

精选ppt
20
精选ppt
21
MIPI接口: 随着手机摄像头像素越来越高,同时要求高的传输速度,传统的并口传输越来越受
到挑战。提高并口传输的输出时钟是一个办法,但会导致系统的EMC设计变得越来困 难;增加传输线的位数也是一种方法,但是这又不符合小型化的趋势。采用MIPI接口 的模组,相较于并口具有速度快,传输数据量大,功耗低,抗干扰好的优点。 高速模式下,每个通道可以传送500M-1000Mbps。
精选ppt
12
精选ppt
13
精选ppt
左图为0.6秒 的慢速快门 拍摄,可将 夜幕下的车 灯拉成线状, 不过慢速快 门一般最好 有三角架, 或者可以找 到支撑的地 方,否则该 清楚的地方 也会模糊
14
传感器:即感光元件CCD或CMOS。 CCD就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想 象成一颗颗微小的感应粒子,铺满在光学镜头后方,当光线与图像从镜头透过、投 射到CCD表面产生电流,将感应到的内容转换成数码资料储存起来。CCD像素数目越
精选ppt
8
广角镜头:焦距短于标准镜头、视角大于标准镜头。 广角镜头的基本特点是:镜头视角大,视野宽阔。具有将距离感夸张化, 对焦范围广等拍摄特点。使用广角时可将眼前的物体放得更大,将远处的 物体缩得更小,四周的图像容易失真也是它的一大特点。广泛用于大场面风 摄影作品的拍摄,能增加摄影画面的空间纵深感。
多、单一像素尺寸越大,收集到的图像就会越清晰。 CMOS则是金属氧化物半导体组件,它和CCD一样负责将光线转变成电荷。只是工艺 不同。目前手机摄像头几乎全部使用CMOS传感器。
精选ppt
15
原传 理感 图器
芯 片 内 部 结 构
手机摄影培训PPT课件

文字与贴纸
在照片上添加文字、水印、贴纸等元素。
特效添加
为照片添加光影、漏光、镜头光晕等特效。
画中画与拼贴功能
实现多张照片的融合与拼接。
手机照片的分享与
社交媒体分享
打印输出
将照片直接分享至微信、微博、抖音等社 交平台。
将手机照片通过无线或有线连接打印出来。
电子相册制作
将手机照片制作成电子相册或动态影集。
赏析
作品利用手机摄影的长曝光功能,将车流和人流模糊化,突 出了建筑物的轮廓和灯光的璀璨。构图上采用了三分法,将 画面分为近、中、远三个层次,增强了画面的空间感。
作品二
《雨后初晴》
简要介绍
这幅作品拍摄于雨后初晴的时刻,通过捕捉阳光穿透云层的 光束,展现了自然的神奇与美丽。
赏析
作品巧妙地利用了雨后的特殊光线条件,捕捉到阳光穿透云 层的光束,营造出一种神秘而宁静的氛围。在构图上,作者 运用了对比手法,将暗部的云层与明亮的光束形成鲜明对比, 增强了画面的视觉冲击力。
04
创意摄影实战案例
案例一
运用双重曝光技巧,创造梦幻般的画面效果
案例二
尝试黑白摄影,展现别样的视觉冲击力
案例三
运用后期处理技巧,打造个性化作品
案例四
结合其他艺术形式进行创意表达,如与绘画、 文字等相结合
手机摄影作品欣赏与
06
点评
优秀手机摄影作品欣赏
作品一
《城市之光》
简要介绍
这幅作品捕捉了城市夜晚的灯光璀璨,通过长曝光和构图技 巧,展现了都市的繁华与宁静。
手机摄影后期处理
04
手机照片的基本编辑功能
01
裁剪与旋转:调整照片 尺寸和角度,去除多余 背景。
在照片上添加文字、水印、贴纸等元素。
特效添加
为照片添加光影、漏光、镜头光晕等特效。
画中画与拼贴功能
实现多张照片的融合与拼接。
手机照片的分享与
社交媒体分享
打印输出
将照片直接分享至微信、微博、抖音等社 交平台。
将手机照片通过无线或有线连接打印出来。
电子相册制作
将手机照片制作成电子相册或动态影集。
赏析
作品利用手机摄影的长曝光功能,将车流和人流模糊化,突 出了建筑物的轮廓和灯光的璀璨。构图上采用了三分法,将 画面分为近、中、远三个层次,增强了画面的空间感。
作品二
《雨后初晴》
简要介绍
这幅作品拍摄于雨后初晴的时刻,通过捕捉阳光穿透云层的 光束,展现了自然的神奇与美丽。
赏析
作品巧妙地利用了雨后的特殊光线条件,捕捉到阳光穿透云 层的光束,营造出一种神秘而宁静的氛围。在构图上,作者 运用了对比手法,将暗部的云层与明亮的光束形成鲜明对比, 增强了画面的视觉冲击力。
04
创意摄影实战案例
案例一
运用双重曝光技巧,创造梦幻般的画面效果
案例二
尝试黑白摄影,展现别样的视觉冲击力
案例三
运用后期处理技巧,打造个性化作品
案例四
结合其他艺术形式进行创意表达,如与绘画、 文字等相结合
手机摄影作品欣赏与
06
点评
优秀手机摄影作品欣赏
作品一
《城市之光》
简要介绍
这幅作品捕捉了城市夜晚的灯光璀璨,通过长曝光和构图技 巧,展现了都市的繁华与宁静。
手机摄影后期处理
04
手机照片的基本编辑功能
01
裁剪与旋转:调整照片 尺寸和角度,去除多余 背景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
流程图我们主要分为CSP、COB以及AF模组,主要是因为他们的
结构存在较大差异,加工流程上也存在较大差别。
PLCC因风险转嫁的问题,在我司可以看做为CSP工艺即可。
重点工艺:
DB:贴Sensor(Die banding)
WB:打金线(Wire banding)
H/M:盖Holder/VCM
调焦:调节模组焦距
模组基本知 识讲解
撰写:程 竹
撰写时间:2015-01-20
CHENLI
1
一、CCM产品简介
• 概念 CCM (Compact Camera Module):即微型摄像模块,因常使用在手机上也 被称为手机摄像头或手机摄像模块,可采用CMOS或者CCD感光元件.
• 分类 1.按SENSOR类型(主要): CCD(charge couple device) :电荷耦合器件 CMOS(complementary metal oxide semiconductor):互补金属氧化物 半导体,我司产品即使用此类型芯片 2.按制造工艺: CSP:CHIP SCALE PACKAGE COB:CHIP ON Board PLCC: Plastic Leaded Chip Carrier
CIF:10万像素;
VGA:30万像素;
1.3M:130万像素;
2M:200万像素;
3.2M:300万像素;
5M:500万像素;
8M:800万像素;
13M:1300万像素;
16M:1600万像素
21M:2100万像素;
CHENLI
3
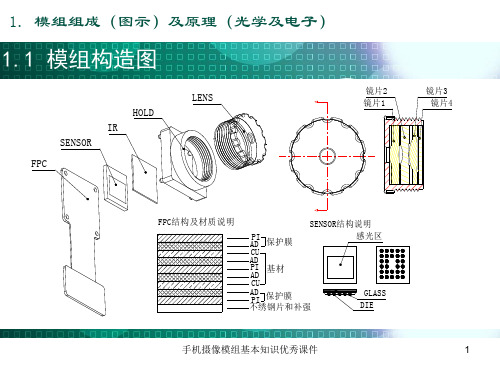
二、产品结构
产品结构很简单,共分为:
1.结构/电路部分:底座,钢板,FPC/PCB,VCM,Driver IC
对模组的影响
影响模组的整体高度
在相同拍摄距离,影像画面所能拍摄内容的多少
影像模组画面的明暗度(尤其在暗环境下)
影像画面中心与边缘的明暗差异的大小
拍摄 物体会发生形状变化,分枕形和桶形畸变
与Sensor偏差过大,有偏色的风险
影像圆过小,会造成模组暗角
主要影像杂光问题和解析力问题
主要用于一些相关理论知识的计算使用
W/B后检查 IR贴付
调焦
VCM引脚焊接 烘烤后检查
烘烤
VCM组装
画胶
Lens VCM锁配
千级 检测 阶段 (千 级无 尘车 间)
UV固化 功能FQC 外观FQC
OQC 贴膜
W/B后清洗 H/M 烘烤
UV照射
IR清洁 半成品功测
OQC 包装
烘烤后检查 PQC
振动 CHENLI
分粒
OQA出货 10
四、模组成像原理
tilt
马达在静止或运C动HE的NL过I 程中,出现倾斜和偏移现象
18
Sensor简介
Sensor:图像传感器,又称芯片、晶圆、Wafer。是感光元器件,主要作用 是将光信号转换为电信号。主要分为CCD和CMOS两种。
CMOS Sensor根据其封装 方式可以分为CSP、COB 两种结构。
成像原理:凸透镜成像
物体
镜头
芯片
CHENLI
11
五、镜头简介
镜头在模组上起着至关重要的地位,目前主要收集模组行业主要采用的是 非球面塑胶镜头。
参数列表
CHENLI
结构图
12
结构
CHENLI
13
参数简介
有效焦距 光学总长TTL
光圈FNO 视场角FOV 畸变Distortion 最大影像圆IMC 有无IR及IR规格
OQC 贴膜
OQC
包装
OQA出货
8
2、COB/COF工艺流程
贴板
锡膏印刷
S
M
印刷QC
T
阶
贴片
段
炉前QC
回流焊
炉后QC
PQC
烘烤后检查
百级 组装 阶段 (百 级无 尘车 间)
烘烤 H/M W/B后清洗 W/B后检查
镜头清洁
W/B
Plasma Clean
Snap Cure
D/B SMTC板H清E洗NLI
主要影像调焦作业的效率
主要影影响镜头厂的制作工艺和价格
CHENLI
15
六、VCM简介
原理:
安培定则二:用右手握住通电螺 线管,使四指弯曲与电流方向一 致,那么大拇指所指的那一端是 通电螺线管的N极
结构:
动子部分:载体、线圈
定子部分:外壳、下载体、上簧片、 下簧片、
CHENLI
16
VCM结构详解
外壳
千级 检测 阶段 (千 级无 尘车 间)
分粒 振动 调焦 点螺纹胶 UV固化 功能FQC 外观FQC
OQC 贴膜
OQC
包装
OQA出货
9
3、AF模组工艺流程
SMT阶段(流程同上)
功测
点螺纹胶
百级 组装 阶段 (百 级无 尘车 间)
SMT板清洗
D/B
Snap Cure
Plasma Clean
W/B
Holder清洗
上簧片 磁铁
线圈
载体
下簧片 下载体
CHENLI
17
参数简介
名词
解释
行程
马达的最低的移动距离
起始电流
马达开始动作的需要最少驱动电流值
斜率
马达运动时,行成直线的斜率
回滞
同一电流值下,马达向上运动和向下运动时的行程差异
姿势差 VCM在水平、向上、向下三个方向运动时,同一电流下的行程差异
阻值
马达的正极和负极之间的电阻值
2.光学部分:镜头,sensor,IR
3.输出部分:金手指、连接器、Socket等
4.辅材部分:保护膜,胶材等
CHENLI
4
常规模组
Reflow模组
Socket模组
3D模组
笔记本模组
CHENLI
5
OIS模组
ZOOM模组
MF模组 (拨杆式)
CHENLI
6
三、工艺流程图
工艺流程图,又叫Process Flow Chart。
扭力规格
镜片个数3P 搭配5M 1/5芯片
搭配的IR厚度
相对照度RI 主光线角CRA 镜筒材质 底座材质
CHENLI
14
名词
解释
♥TTL
光学总长
♥FOV
视场角
♥FNO
光圈
RI
相对照度
Distortion
畸变
♥CRA
主光线角
♥IMC 最大影像圆
♥IR
滤光片
EFL
有效焦距
Torque
扭力
composition 镜片组合
CHENLI
2
一、CCM产品简介
3.按结构类型:
FF:FIXED FOCUS(定焦)
MF:MACRO LENS(拨杆式)
AF:AUTO FOCUS(自动对焦)
ቤተ መጻሕፍቲ ባይዱ
AZ:AUTO ZOOM(自动对焦/光学变焦)
OIS:Operator Interface Stations(光学防抖)
4。按像素分:
QCIF:4万像素;
OTP:烧录
CHENLI
7
1、CSP工艺流 程
贴板
PQC
锡膏印刷
S
M
印刷QC
T
阶
贴片
段
炉前QC
回流焊
炉后QC
百级 组装 阶段 (百 级无 尘车 间)
固化后检查 热固化
镜头搭载 画胶
SMT板清洁 镜头清洁
千级 检测 阶段 (千 级无 尘车 间)
CHENLI
分粒 振动 调焦 点螺纹胶 UV固化 功能FQC 外观FQC