全站仪三角高程测量的方法与误差分析
全站仪三角高程测量的精度分析
牛 东峰 1 董 婉 丽 2
( 1中冶集 团武汉勘 察研 究 院有 限公 司 湖北 武 汉
摘
4 0 8 2吉林 市规 划局 检 察支 队 吉林 吉林 300
12 1 ) 3 0 1
要 : 站仪 三 角高程 测量具 有效 率 高 、 全 实施灵 活等优 点 , 经研 究 并通过 实践验 证 , 对观测 结果 进 在
参 考 文 献 1 闫修 林 . 增 苗 . 波 图 技 术 在 雷 达 终 端 阮 杂
系列 处理 .完 成 后 传送 N RC通 道 输
出及 控 制参 数 .同时 在 引脚 F A 上 L G1
产生低 脉 冲 .使 AD P 4进 入 中断服 务 S#
程序 , 收 由 A S # 送 出的数 据 。 接 DP1
有 限 , 前 只 在 中 、 比例 尺地 形 图测 以 小
1 三 角 高 程测 量 高差 计 算
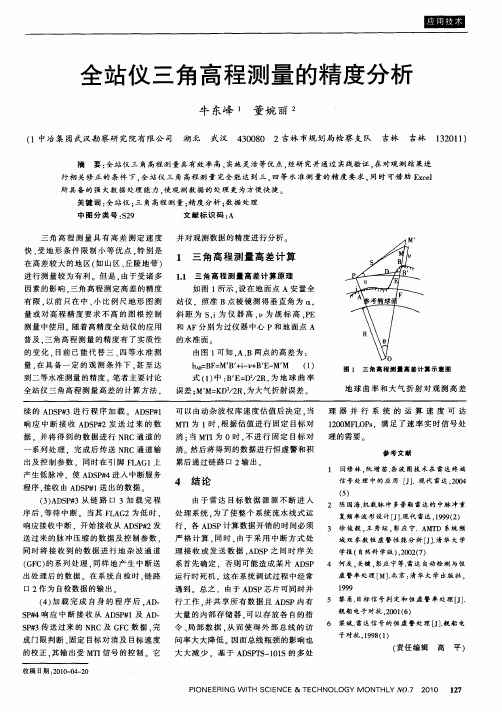
11 三角 高程测 量高 差计 算原 理 .
如 图 1所 示 . 在 地 面 点 A 安 置 全 设
站仪 .照 准 B点 棱镜 测 得垂 直 角 为 . 斜 距 为 S, 为 仪 器 高 , i v为 觇 标 高 , E P 和A F分别 为 过仪 器 中心 P和地 面点 A
2 陈 国海. 机栽 脉 冲 多普 勒雷达 的 中脉 冲重 复频 率波形 设计 [ ] J. 现代 雷达 ,9 9 2 19 ( ) 3 徐俊 毅 , 秀坛 , 王 彭应 宁.AMT 系统 频 D
响 应 接 收 中断 .开 始 接 收 从 AD P 2发 行 .各 AD P计算 数据 开销 的 时间必 须 S# S
的 水 准 面
全站仪三角高程测量方法及精度分析

全站仪三角高程测量方法及精度分析摘要:通过结合全站仪和跟踪杆,我们可以大大提升测量高程的准确性,并且随着应用频率的增加,这种方法也会受到越来越多的重视。
相比于传统的三角测量方法,新型的三角测量技术不仅可以克服其局限性,还能够大大降低误差,提升测量精度。
通过采用无需重复测量仪器和棱镜高度的方式,可以大大减轻外部作业的负担,并且提高测量的效率,这种方法在实际应用中表现出色。
关键词:全站仪;三角高程测量;测量方法;精度分析引言通过使用全站仪测量三角高程,我们可以建立一个三维坐标控制网。
这种方法包括对向观测法和中间观测法。
在进行对向观测时,我们通常会将大气折射系数视为一个常数,但是如果我们忽略了不同方向折射系数的差异性,那么我们就无法准确地评估整个系统的精度。
通过中间观测法,我们可以将折光系数作为一个方向变量来考虑大气折射误差对三角高程测量的影响。
因此,本文将详细介绍三角高程测量方法,并对它们的准确性进行比较分析。
1研究背景和现状高程测量是测量工作的重要组成部分,现代高程测量技术包括水准测量、三角测量和GPS高程测量。
然而,GPS 高程测量技术存在测量精度较低的问题,无法满足日常测量的需求。
此外,传统的三角测量技术,如全站仪测量,也存在一定的局限性,无法满足高程测量的需求。
通过使用全站仪进行三角测量,可以获得两点之间的垂直高度差,这种方法比传统的水平测量更加精确,而且由于没有受到地形的影响,可以更加迅速、准确地完成测量任务。
2全站仪的基本测量原理测量是一项重要的技术,它的主要目的是测量物体的位置、倾斜角、高差。
与传统的测量方式不同,全站仪可以快速、准确地完成测量,大大提高了测量效率,并有效地减少了测量结果的偏差。
全站仪望远镜具有独特的优势,它的核心技术就是其精准的视准轴、高精度的测距光波发射与接收光轴的同轴化,以及可靠的双轴自动倾斜补偿,使得它可以一次性完成所有的测量要素,并确保测量结果的准确性。
3全站仪三角高程测量方法特征分析以及研究进程3.1单向观测法使用全站仪三角高程测量单向观测法可以获得较高的水准测量精度,但是在进行测量之前,必须充分考虑地球曲率和大气折射带来的可能影响,这将会对测量结果产生重大影响。
全站仪三角高程测量的方法与误差分析
全站仪三角高程测量的方法与误差分析摘要:本文介绍了三角高程测量原理以及全站仪三角高程测量的不同方法,对于每种方法所能达到的精度进行分析。
关键词:三角高程测量;单向观测;对向观测;中间自由设站;精度分析1.前言全站仪三角高程测量可以少受地形限制,在山区、高架桥、深基础施工高程放样中全站仪三角高程测量具有水准测量无法比拟的优越性。
可以用于路、桥、涵、墩、台、深基础的施工高程测量,提高了精度、效率。
对各种施工条件下的三角高程测量方法:高程放样测量、后方交会三角高程测量、悬高测量等进行了介绍和探讨,实践表明,全站仪三角高程测量完全可以取代三、四等水准测量,并有取代二等水准仪的趋势。
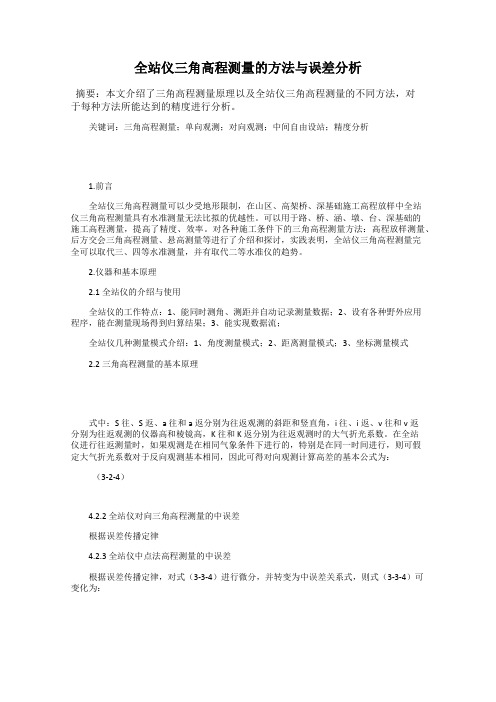
2.仪器和基本原理2.1全站仪的介绍与使用全站仪的工作特点:1、能同时测角、测距并自动记录测量数据;2、设有各种野外应用程序,能在测量现场得到归算结果;3、能实现数据流;全站仪几种测量模式介绍:1、角度测量模式;2、距离测量模式;3、坐标测量模式2.2三角高程测量的基本原理式中:S往、S返、a 往和a返分别为往返观测的斜距和竖直角,i 往、i返、v 往和v返分别为往返观测的仪器高和棱镜高,K 往和K 返分别为往返观测时的大气折光系数。
在全站仪进行往返测量时,如果观测是在相同气象条件下进行的,特别是在同一时间进行,则可假定大气折光系数对于反向观测基本相同,因此可得对向观测计算高差的基本公式为:(3-2-4)4.2.2 全站仪对向三角高程测量的中误差根据误差传播定律4.2.3 全站仪中点法高程测量的中误差根据误差传播定律,对式(3-3-4)进行微分,并转变为中误差关系式,则式(3-3-4)可变化为:为了对全站仪高程测量的 3 种方法进行验证,分析各种方法的精度,本研究选取 m=±2 &精度的全站仪为例,其测距精度为由表 2 可知,3 种测量方法中对向观测的误差最低,精度最好,中点法测量次之,单向高程测量精度最差。
全站仪三角高程测量的方法与误差分析本科毕业论文

全站仪三角高程测量的方法与误差分析本科毕业论文全站仪通过发射一束可见光束,测量激光束从仪器到目标反射点的时间,并通过时间差计算出仪器与目标点之间的距离。
三角高程测量是利用全站仪的水平角和垂直角的测量结果,结合已知的基线长度,通过三角形计算出目标点的高程。
1.设置仪器:将全站仪放置在测站点上,确保仪器的水平和垂直准星位于同一平面上。
2.瞄准目标点:通过望远镜瞄准需要测量高程的目标点。
3.测量水平角:通过全站仪记录目标点与两个已知点的水平角。
4.测量垂直角:通过全站仪记录目标点与水平面的垂直角。
5.计算高程:根据测量的水平角和垂直角以及已知基线长度,通过三角形计算出目标点的高程。
6.数据处理:根据多次测量的结果,进行数据平差处理,获得更准确的测量结果。
在全站仪三角高程测量中,需要考虑的误差主要包括仪器误差、自然因素和操作误差。
仪器误差包括仪器刻度误差、指向误差和折射误差等,可以通过定期校准仪器和使用精确的仪器控制误差。
自然因素包括大气折射、大地水准曲率和大地水准面偏差等,可以通过校正和补偿来减小误差。
操作误差主要包括读数误差、瞄准误差和放样误差等,可以通过培训和规范操作来减小误差。
为了进一步分析误差,可以采用误差理论进行误差分析。
误差理论可以通过误差传播法则计算最终测量结果的误差范围。
同时,可以通过实验和模拟等方法验证误差分析的有效性,并提出改进测量方法和减小误差的措施。
综上所述,全站仪三角高程测量是一种常用的测量方法,能够提供准确的高程数据。
在实际测量中,需要注意仪器的校准和控制、自然因素的校正和补偿,以及规范的操作。
通过误差分析,可以评估测量结果的准确性,并提出改进测量方法和减小误差的建议,从而提高测量的可靠性和准确性。
工程测量中三角高程测量误差分析及解决方法

工程测量中三角高程测量的误差分析及解决方法戚忠中国水利水电第四工程局有限公司测绘中心,青海西宁,邮编810007一引言一直以来,为保证精度,高等级高程测量都采用几何水准的方法。
而在某些特定环境下,几何水准往往会耗费大量的人力、物力,且受地形等条件因素影响较大!鉴于几何水准在某些特定情形下无法进行的问题,探讨如何提高三角高程测量的精度,以保证其测量成果的可行性和可靠性,使得三角高程测量成果足以替代几何水准。
随着高精度全站仪的问世,结合合理的方式、方法,运用三角高程替代几何水准测量是切实可行的。
三角高程代替几何水准可以解决跨河水准及高边坡、危险地段无法进行精密几何水准测量的难题,保障危险地段测量人员和仪器设备的安全,提高了工作效率,降低了测量成本。
二三角高程测量误差分析常见的三角高程测量有单向观测法、中间法和对象观测法,对向观测法可以消除部分误差,故在三角高程测量中采用较为广泛。
对向观测法三角高程测量的高差公式为:(1)式中:D为两点问的距离;a为垂直角;为往返测大气垂直折光系数差;i为仪器高;v为目标高; R为地球曲率半径(6370 km);为垂线偏差非线性变化量;令。
对式(1)微分,则由误差传播定律可得高差中误差:(2) 由式(2)可知影响三角高程测量精度主要有:1.竖直角(或天顶距)、2.距离、3.仪器高、4.目标高、5.球气差。
第1、2项可以通过试验观测数据分析选择精度合适的仪器及其配套的反光棱镜、温度计、气压表等,我们选择的是徕卡TCA2003及其配套的单棱镜、国产机械通风干湿温度计、盒式气压计;第3、4项,一般要求建立稳定的观测墩和强制对中装置,采用游标卡尺在基座3个方向量取,使3个方向量取的校差小于0.2 mm,并在测前、测后进行2次量测;第5项球气差也就是大气折光差,也是本课题的研究重点。
三减弱大气折光差的方法和措施大气折光差:是电磁波经过大气层时,由于传播路径产生弯曲及传播速度发生变化而引起观测方向或距离的误差。
全站仪三角高程测量及其精度分析

高, k为大气折光系数 , 为地球曲率半径 , A、 尺 则 B两点之间单向观测高差为 :
h s=S B×s a a A i A+ n × a A+i A—V A () 1
同理 , B 点 向A 点 进 行对 向观测 , 由 假设 两 次 观测 是在 相 同 的气 象 条 件下进 行 的 , 则取 双 向观测 的平 均
值可以抵消其球曲率和大气折光 的影响, 并得到 A、 B两点对 向观测平均高差为[ : 。 】
1
hs 号[A× i A sA sa + i—V) ( — B] a= SB s a — B × i B ( n n A A 一 i V) B
1 5 25 3 5 4 5 5 5
从实验数据分析可看出: 向观测高差中误差随着竖直角及视线斜距的增大而增大。对于短测距边长, 对
仪器高和棱镜高量测误差是全站仪三角高程的主要误差。若取二倍中误差作为三角高程极 限误差, 则对于 测角中误差为 ±1 全站仪 , 向观测法在测距边长大于 101 情况下 , 对 0 t T 其三角高程精度可以满足三等水准限
维普资讯
广西 工学 院学报
第 1 9卷
如果取测角标准差 =±1, 测距标准差 s =±( +2 ~S m 仪器高和棱镜高量取中误差 2 1 x 0 ) m, =± . r l 10 n , n 则对应不同的竖直角 口和倾斜距离 S, 对向观测高差 的中误差见表 1 所示。
析。
关
键
词: 全站仪 ; 三角 高程 ; 精度 ; 向观测法 ; 对 中间观测法 文献标识 码 : A
全站仪三角高程测量方法

全站仪三角高程测量方法
首先,确定测量点和参考点的位置。
在进行高程测量之前,需要确定好测量点
和参考点的位置。
测量点是需要测量高程的点,而参考点是已知高程的点。
在确定位置时,需要考虑到地形的起伏和可见性,以确保测量的准确性和可靠性。
其次,设置全站仪。
在确定好测量点和参考点的位置后,需要设置全站仪。
首先,将全站仪放置在水平地面上,并通过调节仪器的水平仪使其水平。
然后,通过调节仪器的望远镜使其指向参考点,并记录下参考点的水平角和垂直角。
接着,测量目标点的水平角和垂直角。
将全站仪指向测量点,并记录下测量点
的水平角和垂直角。
在记录角度时,需要确保仪器的稳定和准确,以避免误差的产生。
然后,计算高程。
通过测量得到的水平角和垂直角,可以利用三角函数的关系
计算出测量点的高程。
在计算高程时,需要考虑到地球的曲率和大地水准面的影响,以确保计算结果的准确性。
最后,校核和修正。
在完成高程测量后,需要对测量结果进行校核和修正。
校
核的目的是检验测量结果的准确性,而修正则是对可能存在的误差进行修正,以提高测量结果的可靠性和准确性。
通过以上的全站仪三角高程测量方法,可以实现对地面高程的准确测量。
在实
际的测量工作中,需要严格按照方法进行操作,并注意仪器的校准和调整,以确保测量结果的准确性和可靠性。
同时,需要根据实际情况对测量结果进行校核和修正,以提高测量的准确性和可靠性。
如何使用全站仪进行三角高程测定

如何使用全站仪进行三角高程测定
全站仪是用来测量地面上各个点的三维坐标和高程的仪器。
在
进行三角高程测量时,我们需要准备好以下工具:
- 全站仪
- 一架三脚架
- 一个反光棒
- 一张三角高程测量表
具体操作步骤如下:
1. 将全站仪放在需要测量的点上,将三脚架张开并调整好高度,将全站仪放在三脚架上并固定。
2. 打开全站仪并对准带反光棒的目标点。
3. 在全站仪上选择三角高程测量功能,并输入目标点与全站仪
之间的距离。
4. 移动全站仪并对准另一个目标点,重复步骤3直到测量完所
有需要测量的点为止。
5. 将测量结果填入三角高程测量表中,并根据表格计算出每个
点的高程。
需要注意的事项:
- 在进行测量前应先校准全站仪,以确保测量结果的准确性。
- 在对准目标点时要注意不要对着阳光测量,避免阳光反射影
响测量结果。
- 在存储数据时要注意标注清楚每个点的具体位置,避免混淆。
以上就是使用全站仪进行三角高程测量的方法及注意事项。
希
望对你有所帮助!。
全站仪三角高程测量方法

全站仪三角高程测量方法全站仪是一种先进的测量仪器,具有测量水平角、垂直角和斜距的功能,因此在进行三角高程测量时,可以采用以下方法:1. 三角高程测量原理:三角高程测量是利用三角学原理进行测量的方法。
当我们在地面上选择三个测站,并测量出它们之间的水平角、垂直角和斜距时,根据三角关系可以计算出这些测站的高程。
2. 选择测站:在进行三角高程测量时,首先需要选择三个测站,并保证这三个测站之间形成一个合理的三角形。
测站的选择要考虑到其位置相对固定和稳定,同时要满足仪器观测范围的要求。
3. 测量水平角:使用全站仪测量水平角的方法有两种:反射测量和直接测量。
反射测量是将反光棱镜放置在测站上,然后使用全站仪对反射棱镜进行测量,得到水平角的数据。
直接测量是将全站仪直接对准目标,通过全站仪内置的水平角读数装置进行测量。
4. 测量垂直角:全站仪可以通过照准测量和激光测量两种方法来测量垂直角。
照准测量是将全站仪对准目标,然后通过全站仪内置的图像传感器来读取目标的中轴线,从而获得垂直角的数据。
激光测量是利用全站仪内置的激光器向目标发射激光束,然后通过在目标接收到光线的位置上读取垂直角的数据。
5. 测量斜距:通过使用全站仪的测距仪,可以实时测量出目标与测站之间的水平距离或斜距。
全站仪的测距仪可以通过使用红外线或激光技术来测量距离,并将测得的数据显示在仪器的屏幕上。
6. 计算高程:当我们完成三个测站的水平角、垂直角和斜距的测量后,可以利用三角关系计算出测站的高程。
常用的计算方法有正算法和反算法。
正算法是已知两个测站的高程和一个介于它们之间的斜距,通过三角关系计算出第三个测站的高程。
反算法是已知两个测站的高程和一个测站的高程,通过三角关系计算出这个测站到其他两个测站的斜距。
总结:全站仪的三角高程测量方法包括选择测站、测量水平角、测量垂直角、测量斜距和计算高程。
通过合理的测站选择和准确的观测操作,可以获得高精度的三角高程测量数据,从而为工程测量和地形测量提供可靠的高程数据支持。
简述免仪高的全站仪三角高程测量方法

简述免仪高的全站仪三角高程测量方法免仪高的全站仪三角高程测量方法
全站仪三角高程测量方法是一种独特的、被广泛应用的高程测量技术。
这种技术使用全站仪可以实现相对定向,测量的结果可以用于高程测量、引出地形地势信息、定位目标物等。
其主要步骤是:
(1)定向:定向是测量前的基础工作,是三角高程测量的首要操作,也是定位目标物的重要技术步骤。
(2)测量:测量就是把全站仪定位到某个指定的点,然后根据测距、测量和数据处理等过程,进行高程测量。
(3)校准:校准是全站仪三角高程测量的最后一步,需要在测量完成之后对全站仪进行校准,以便保证测量结果的准确性。
(4)数据处理:数据处理就是利用全站仪测量得到的数据进行数据处理以便获得最终的结果。
上述就是全站仪三角高程测量方法的基本步骤。
它在现代测量中起着重要的作用,是提高测量效率和获得准确测量数据的重要手段。
- 1 -。
全站仪三角高程测量误差与边长及角度的关系

根据误差传播定律将式( 8 ) 转变为中误差关系式, 则式( 8 ) 变 化为:
式中:取 则:
(9)
= 2 0 6 2 6 5 。于是上式可简化为:
( 1 0 ) : 2 2 ~2 4 . [8] 陶海生. 全站仪应用于高程测量之精度探讨[ J ] . 中南公路工程,
2 0 0 3 , 2 8 ( 3 ) : 5 9 ~6 1 .
科技资讯 SCIENCE & TECHNOLOGY INFORMATION
51
的影响, 得出全站仪三角高程测量误差与边长及竖直角的关系。
关键词: 全站仪 误差 边长 竖直角
中图分类号: P 2 2 4
文献标识码: A
文章编号: 1 6 7 2 - 3 7 9 1 ( 2 0 0 9 ) 0 3 ( a ) - 0 0 5 0 - 0 2
高程测量是根据一点的已知高程, 测定与另一点的高差, 然后 算出另一点的高程。测定两点间的高差, 传统的方法有水准测量, 三角高程测量[1] 。近年来, 随着全站仪的广泛应用以及对全站仪的 深入认识, 测绘工作者越来越多的用全站仪三角高程测量来替代 水准仪高程测量, 特别是通过全站仪对向三角高程测量来替代三、 四等水准测量, 并且许多学者对此作了大量理论研究及大量实测 数据的验证[ 2 - 5 ] 。但这些研究只是停留在满足三四等水准测量的要 求上, 而且只从部分数据上得出高程测量误差随边长和角度的增 加而增加, 并未对其变化对高程测量观测误差影响情况作进一步 分析研究。本文就此问题从误差来源及误差传播定律出发, 得出 高程测量精度公式, 分析并计算不同边长及观测竖直角对全站仪 对向三角高程测量精度的影响。
全站仪三角高程测量方法

全站仪三角高程测量方法第一步:仪器准备首先,根据实际情况选择适当的测高点,并在该点上插起遥控杆,确保全站仪可以准确锁定目标。
然后,根据需要设置全站仪的高程仪的零位,并将全站仪调整到水平状态。
第二步:目标设置将全站仪对准目标点,并使用遥控器调整全站仪的水平和垂直方向,使仪器准确锁定目标点。
第三步:观测测角使用全站仪的测角功能,测量目标点与参考点之间的水平角和垂直角。
根据需要进行多组测量以增加测量精度。
第四步:计算水平距离根据测得的水平角和垂直角,利用三角函数计算目标点与参考点之间的水平距离。
一般来说,可以利用如下公式进行计算:水平距离 = 斜距× sin(垂直角)第五步:计算高差根据测得的水平距离和垂直角,可以计算目标点相对于参考点的高差。
可以利用如下公式进行计算:高差 = 斜距× cos(垂直角) - 参考点高程第六步:重复观测为了提高测量精度,可以对同一目标点进行多次观测,并求取平均值来减小误差。
在测量过程中,应注意避免强烈的日照、大风、震动等对测量结果的影响。
第七步:校正和纠正根据需要,可以进行校正和纠正以减小测量误差。
比如,可以进行仪器误差校正,或者通过测量参考点和校正点之间的高差,对测得的高差进行纠正。
第八步:记录和分析将测量结果记录下来,并进行分析和处理。
可以使用计算机软件进行数据处理,绘制等高线图或者建立数字地形模型。
在进行全站仪三角高程测量时,需要注意以下事项:1.选择合适的目标点和参考点,并确保在观测期间目标点不发生变化。
2.在测量过程中,应当避免使用过大的测量距离,以减小测量误差。
3.在测量目标点与参考点之间的垂直角时,应注意避免仪器的抖动和偏斜,以减小测量误差。
4.在观测角度时,应尽量使用对称角,以减小反射误差。
5.使用全站仪进行测量时,应注意避免强烈的日照,避免造成测量误差。
6.在测量过程中,应定期检查全站仪的水平状态,并进行调整,以保证测量的准确性。
7.在记录测量结果时,应准确记录角度、距离和高差等数据,并进行单位的统一,以避免数据误差。
全站仪三角高程测量精度分析

全站仪三角高程测量精度分析
一、仪器原理
全站仪三角高程测量基于三角测量原理,通过测量物体与测站以及目标之间的角度,根据三角关系计算出物体的高程。
测量过程中,全站仪会通过发射红外线或激光束,自动测量和记录目标物与测站之间的水平角和垂直角。
同时,全站仪也会通过内置的距离仪来测量测站与目标物之间的距离。
通过融合这些数据,全站仪能够计算出目标物的高程。
1.环境因素:如温度、大气压力、湿度、气流等因素会对全站仪的测量精度产生影响。
特别是大气折射效应会导致测量结果产生偏差。
2.仪器本身的误差:全站仪的测量系统包括角度测量系统和距离测量系统,这两个系统本身都存在精度限制和系统误差,如仪器的仰角误差、仪器的定位误差等。
3.人为误差:操作人员在使用全站仪进行测量过程中,可能由于技术水平、操作不当或者主观判断等原因导致误差的产生。
比如未能正确对准目标、未能保持仪器的水平或垂直等。
4.目标物本身的误差:目标物的安装质量、目标物的高程变化等因素都会对三角高程测量结果产生影响。
1.仪器选择:选择高精度、稳定性好的全站仪,以减小仪器本身的误差对测量结果的影响。
2.仪器校准:定期对全站仪进行校准,以确保仪器的测量精度符合要求。
3.仪器使用规范:操作人员需要按照全站仪的使用说明进行操作,保持仪器的水平和垂直,正确对准目标,避免人为误差的产生。
4.环境条件控制:在测量过程中,应尽可能控制环境条件,如避开大气折射效应较大的时段进行测量,保持测量场地稳定。
5.数据处理方法:在数据处理过程中,采用合适的数学模型和算法进行计算,降低误差的传递和累积。
全站仪三角高程测量方法

全站仪三角高程测量方法全站仪三角高程测量是一种常见的测量方法,它是利用全站仪的功能完成的。
全站仪是一种先进的测量仪器,可以同时测量水平角、垂直角和斜距,具有高精度和高效率的特点。
三角高程测量是通过测量三角形的角度和边长来计算出待测点的高程。
全站仪三角高程测量的步骤如下:1. 建立三角测量网:首先,需要在待测区域内建立起一定数量的控制点,这些控制点要能够互相看见,形成一个闭合的三角形控制网。
控制点的位置可以根据地形和实际需求来选择,一般要选取在地势较高且不易遮挡的地方。
2. 选择目标点:选择待测点,即需要测量高程的点。
目标点的选择要考虑到测量的准确性和可行性,一般要选择在可观测的控制点旁边,以保证测量的精度。
3. 进行观测:使用全站仪观测待测点与控制点之间的角度和斜距。
观测时,首先要对控制点进行测量,测量控制点的位置和高程,以确定其空间坐标。
然后,将全站仪转至待测点,观测待测点与控制点之间的角度和斜距。
观测时,要注意保持仪器的水平和垂直,控制观测的时间和操作使其尽量减小。
4. 数据处理:观测完成后,需要对观测数据进行处理。
处理的主要内容包括角度观测值的平差、斜距观测值的平差和高程计算。
角度观测值的平差可以使用三角闭合平差法或最小二乘法进行,斜距观测值的平差可以使用杆长观测法或三边观测法进行平差。
在计算高程时,需要使用三角形的高程计算公式,结合已知的控制点高程和测得的控制点与待测点之间的高差,来计算待测点的高程值。
5. 矫正高程:为了提高测量的精度,需要对观测到的高程进行矫正。
主要的矫正方式有大地水准面、大地水准面高差改正、六参数高差改正等。
根据实际情况,选择合适的矫正方法进行矫正。
全站仪三角高程测量方法具有测量精度高、操作简便、测量效率高的特点,因此被广泛应用于各种测量工程中。
但是,在实际测量中,还需要注意一些技术要点,如全站仪的校准、观测时的操作规范、数据处理的准确性等,以确保测量结果的准确性和可靠性。
全站仪中间法三角高程测量分析
2012年第29期(总第44期)科技视界Science &Technology VisionSCIENCE &TECHNOLOGY VISION 科技视界0引言确定地面点高程的测量工作,称为高程测量,按所使用的仪器和施测方法不同,高程测量方法主要有水准测量、三角高程测量、GPS 高程测量。
水准测量精度高,可用于任何等级的高程测量,但劳动强度大、进度慢。
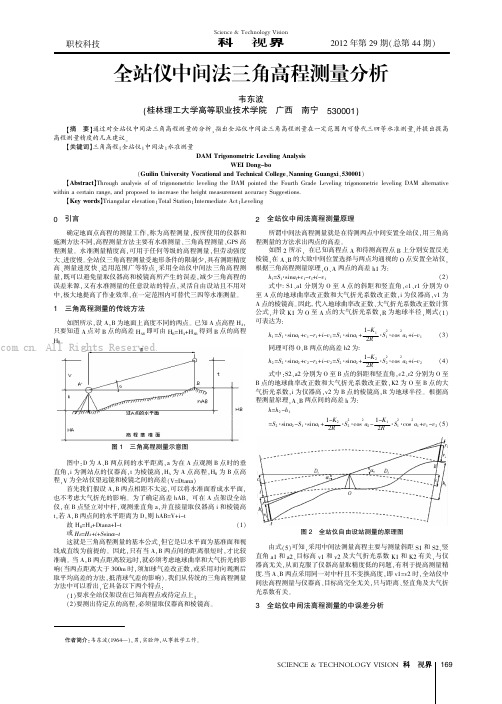
全站仪三角高程测量受地形条件的限制少,具有测距精度高、测量速度快、适用范围广等特点,采用全站仪中间法三角高程测量,既可以避免量取仪器高和棱镜高所产生的误差,减少三角高程的误差来源,又有水准测量的任意设站的特点,灵活自由设站且不用对中,极大地提高了作业效率,在一定范围内可替代三四等水准测量。
1三角高程测量的传统方法如图所示,设A,B 为地面上高度不同的两点。
已知A 点高程H A ,只要知道A 点对B 点的高差H AB 即可由H B =H A +H AB 得到B 点的高程H B 。
图1三角高程测量示意图图中:D 为A、B 两点间的水平距离,а为在A 点观测B 点时的垂直角,i 为测站点的仪器高,t 为棱镜高,H A 为A 点高程,H B 为B 点高程,V 为全站仪望远镜和棱镜之间的高差(V=Dtanа)首先我们假设A,B 两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响。
为了确定高差hAB,可在A 点架设全站仪,在B 点竖立对中杆,观测垂直角а,并直接量取仪器高i 和棱镜高t,若A,B 两点间的水平距离为D,则hAB=V+i-t故H B =H A +Dtanа+I-t (1)或H B =H A +i+S sin α-t这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B 两点间的距离很短时,才比较准确。
当A,B 两点距离较远时,就必须考虑地球曲率和大气折光的影响(当两点距离大于300m 时,须加球气差改正数,或采用对向观测后取平均高差的方法,抵消球气差的影响)。
全站仪三角高程测量方法

全站仪三角高程测量方法Document number【980KGB-6898YT-769T8CB-246UT-18GG08】应用全站仪进行三角高程测量的新方在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
经过长期摸索,总结出一种新的方法进行三角高程测量。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法如图一所示,设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A点对B点的高差HAB 即可由HB=HA+HAB得到B点的高程HB。
此主题相关图片如下:图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角i为测站点的仪器高,t为棱镜高HA为A点高程,HB为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=Dtanа)首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t故??????HB =HA+Dtanа+i-t????????(1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
全站仪三角高程测量精度分析

量前, 必须 对其 高程成 果作精度 评估 满足 施工 设计要 求
后 再进行 作业 。 本文根 据三 角高程测 量原 理 , 公路测 量 中采用 全 对
2三 角高程 测量精度 计算公式
根 据() 用 误差 传播 定 律则 得 高差 中误 差 计算 公 5 应 站 仪三角 高程测 量方法进 行 中桩高程 测量 的方 法 、 度 式为 : 精 估 算及如何 减少误 差作 简单探讨 。
检测与监理
广东建材 21 年第 5 00 期
全站仪三角高程测量精度分析
梁杏球 ( 东 省 冶 金建 筑 设 计 研 究 院) 广
摘 要 :根据三角高程测量原理及误差传播定律, 对全站仪三角高程测量在公路工程测量中的应用
及精度估算进行探讨 。
关键词 :全站仪; 三角高程测量; 精度估算 三 角高程 测 量 的基 本 思想就 是 根据 测站 向照准 点
关 键词 :处理土地基; 承载力特征值: 压板试验; 变形参数; 工后沉降
1 前言
为提 高地基 土 的承 载 力 、改善 变形 性质 或渗 透性 ,
对 土 进行 人 工 处理 后 的地 基 。处 理土 地 基 包括 换 填地 基 、 压处理 地基 、 预 强夯 处理 地基 、 加填 料振 冲 加密 处 不 理地基 和注 浆地 基等 。 处理 土地 基在 地基 处理 中广泛 存
全站仪三角高程测量的精度分析

h B D。 t仅e e Bg B+i —v=h B+i —v
而高差 h B A + 。 A =h hB
+ p m) m。 2p m .
l
hd he B
Z \
.
i
基 准 面
对于不同的水平 距离 D和不 同的竖 直角 d,下 面列 表 得出观测主高差的 中误差大小 :
表1
2 m 5 m 7 m 1 0 5 0 5 0 m 1 5 2 m 1 0m 1 5m 2 o 5 7 0 m
定不得低 于 ± ” 1因此设 m =±1。 ” 全站仪 的测距精度 m。=士 ( A+B D ・ )mm。 式 中 :A为全 站仪 的固定误 差 ;B为全 站仪 的 比例 误差 系 数 ;D为被测水平距离 。 全站仪 的固定误差 A一般在 1mm一 m;比例误差系 5m 数 B一般在 1 p 3 p p m一 p m,即每 lm有 1lI~ m的 比例 k l 3m Il l 误差 。全站仪三角 高程 测量代 替 国家二 等水准 测量 时 ,其 测距 的精度规定不 得低 于 ( 2+2 p m 我们 假设 就取 ( pm) m, 2
图 1
首先 由 三 角 高 程 测 量 高 差 的 基 本 公 式 得 到 :
h A= D。 tde + i—v =h A+ i— v g A 。 A
±0o o0 . 2土O 2 . 6 ±0. 8 士O. . 3 ±0 8 o o”±0 1 . 4 士0 3 4 61±0 7 . 5 ±0. 7 9
= 一( h。 —v A+i )+( i ) h B+ —v
三角高程测量原理、误差分析及应用

三角高程测量1 三角高程测量的基本原理三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。
它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。
目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。
在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距)和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。
由图中各个观测量的表示方法,AB两点间高差的公式为:h=S0tanα+i1-i2 ①但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。
因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。
1.1 单向观测法单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。
这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。
1.2 对向观测法对向观测法是目前使用比较多的一种方法。
对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。
从而就可以得到两个观测量:直觇:h AB= S往tanα往+i往-v往+c往+r往②反觇:h BA= S返tanα返+i返-v返+c返+r返③S——A、B间的水平距离;α——观测时的高度角;i——仪器高;v——棱镜高;c——地球曲率改正;r——大气折光改正。
然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。
由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。
所以在对向观测法中可以将它们消除掉。
h=0.5(h AB- h BA)=0.5[( S往tanα往+i往-v往+c往+r往)-( S返tanα返+i返-v返+c返+r返)] =0.5(S往tanα往-S返tanα返+i往-i返+v返-v往) ④与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。
全站仪三角高程测量方法及精度分析

全站仪三角高程测量方法及精度分析摘要:测量高程的过程当中可以将全站仪与跟踪杆配合使用,从而获得更加好的效果,保障应用的频率越来越高。
传统的三角高程测量方法有一定的局限性,新的三角高程测量方法能够突破这种局限性,减少误差的来源、提高精度。
每次进行测量的过程当中,不需要反复对仪器的高度进行测量,也不需要对棱镜的高度进行反复测量,在外作业的工作任务量有效减少,同时进行测量的速度也有所提升,在实际工作过程当中,有非常出色的应用价值。
关键词:全站仪;三角高程测量;测量方法;精度分析引言:很多不同的测量工作当中,高度测量都是必不可少的一个步骤,在利用一些经常使用的高程测量方法的过程当中,我们可以明显的发现水准测量方法可以获得非常高的精度,但与此同时它的局限性也很明显。
水准测量非常容易受到外界地形因素的影响,测速很难得到有效地提升。
但是三角高程测量方法测量速度非常快,但是却容易产生较大误差,同时也会对测量工作产生不利影响。
但是随着全站仪的投入使用,帮助选取更加合理的选择测量方法,不但可以提高测量效率还能确保精度。
一、三角高程测量方法的基本概念和发展前景(一)三角高程测量方法的基本概念分析三角高程测量方法实际上是通过确定观测点之间的水平距离以及竖直角,利用特定高效的公式运算,从而经过严密的计算得出需要等待测量高程差的一种测量方法[1]。
这种测量方法比较简单,同时不会受到测量现场的一些独特的地形因素的影响,在应用过程当中以出色的表现在诸多工程施工当中广泛地得到了应用,因此三角高程测量方法也就成为了测量高程的一种基本的测量方法。
(二)三角高程测量方法的发展前景分析全站仪三角高程测量代替了水准测量,并且在很多实际的测量工程当中,被许多技术人员所赞同并且运用到实际当中,还取得了非常亮眼的应用效果[2],这也表明了,在考虑到很多方面的因素之后,在固定的条件之下,三角高程测量方法应用过程中所能达到的精度并不会很低,所以才会发展势态良好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全站仪三角高程测量的方法与误差分析南昌工程学院毕业论文水利与生态工程系院测绘工程专业毕业论文题目全站仪三角高程测量的方法与误差分析学生姓名倪忠利班级 07测绘工程学号 2007101191指导教师陈伟完成日期 2010年 06月 17 日全站仪三角高程测量的方法与误差分析Total Station trigonometric leveling method and error analysis 总计毕业设计论文 25 页表格 2 个插图 3 幅本文介绍了三角高程测量原理以及全站仪三角高程测量的不同方法对于每种方法所能达到的精度进行分析在相同条件下采用不同的方法对高差精度的影响是不同的所能达到的测量精度等级要求也是不一样的从而在实际生产应用中可针对不同的精度要求和具体的客观实际情况选择不同的测量方法关键词三角高程测量单向观测对向观测中间自由设站精度分析This paper introduces the measuring principle and triangular elevation of trigonal height measurement method for each different the precision of the method can be analyzedUnder the same conditions used different methods the influence of accuracy of elevation is different can achieve the measurement precision level requirement is differentThus in the actual production application can be in view of the different accuracy and the objective reality of specific select different measuring methods Key word trigonometric levelling One-way observation Two-way observation Free among set up observation Precision analysi目录摘要IAbstract II第一章绪论 111 前言 112 全站仪三角高程测量的研究发展与现状 213 研究的意义及其在工程上的应用 3第二章全站仪三角高程测量 421 全站仪的介绍与使用 422 三角高程测量的发展史 523 三角高程测量的基本原理 5第三章全站仪三角高程测量的方法831 单向观测832 双向观测933 中间自由设站观测10第四章误差分析1241 影响误差的因子1242 误差分析13com单向三角高程测量的中误差13com 全站仪对向三角高程测量的中误差14com 全站仪中点法高程测量的中误差14结论与展望18参考文献20 致谢21第一章绪论11 前言全站仪三角高程测量作为高程测量的一种有效手段已被广泛应用于生产实践中目前在三角高程测量中主要应用单向观测法对向观测法和中间自由设站观测法测相邻两点间高差本文结合全站仪三角高程原理导出以上3种不同方法的高差计算公式并利用误差传播定律推导出中误差计算式对各种方法的高差中误差数据进行分析随着测量技术的快速提高全站仪已普遍用于控制测量地形测量及工程测量中并以其简捷的测量手段高速的电脑计算和精确的边长测量深受广大测绘人员的欢迎近年来人们对全站仪已有了更深入地认识对全站仪在高程测量方面的应用已有了大量研究其方法有全站仪单向和对向三角高程测量这两种方法都是将全站仪安置在已知高程的测点上在待测点上安置棱镜量取仪器高和棱镜高采用单项或对向观测法测定两点间的距离和竖直角按三角原理计算高差尽管全站仪测距和测角精度很高但仪器高和棱镜高都采用钢尺按斜量法或平量法获取其精度约为±2-3㎜故其误差是不容忽视的而且他们是固定值距离越短对高程测量影响越大因此有研究者提出全站仪中点法高程测量此方法将全站像水准仪一样任意置站而不是将其置在已知高程点上在不量取仪器高的情况下利用三角高程测量原理测出待测点的高程然而此方法误差随着观测距离和竖直角的增大而增加虽然以上 3 种方法各有其优缺点但并未见对 3 种方法作全面综合误差评定分析的研究特别是在相同观测条件下研究各自测量精度以及其适用范围等本文从三角高程测量原理出发根据误差传播定律综合考虑各测量方法的误差来源及其影响并对测量精度进行评定分析得出各方法代替水准测量的优缺点适应条件及适应范围等使测量工作者可根据实际工作选择最佳测量方案12 全站仪三角高程测量的研究发展与现状因自从上世纪九十年代开始全站仪越来越普及到如今已被广泛使用于地形图测量和工程施工测量中使用跟踪杆配合全站仪测量高程的方法也越来越被测绘工作者所采用因此全站仪三角高程测量取代经纬仪三角高程测量是一种必然的选择这种取代绝不仅仅是简单的仪器更换无论是从方法上精度上还是效率上来说全站仪三角高程测量都具有经纬仪三角高程测量无法比拟的优越性全站仪三角高程测量是经过长期的摸索后总结出的一种新的三角高程测量方法这种方法既结合了水准测量的任意置站的特点同时结合了经纬仪三角高程测量不受地形限制的特点而且测量时不需要量取仪器高和棱镜高减少了三角高程测量的误差来源提高了三角高程测量的精度施测速度也明显更快了近年来人们对全站仪已有了更深入地认识对全站仪在高程测量方面的应用已有了大量研究其方法有全站仪单向和对向三角高程测量这两种方法都是将全站仪安置在已知高程的测点上在待测点上安置棱镜量取仪器高和棱镜高采用单项或对向观测法测定两点间的距离和竖直角按三角原理计算高差13 研究的意义及其在工程上的应用在地形图测绘和工程的施工测量过程中常常涉及到高程测量以前传统的测量方法是水准测量和经纬仪三角高程测量这两种方法虽然各有特色但都有着明显的缺点目前随着电子全站仪在测绘行业和工程施工单位的普及和其智能化发展方向的日益明显利用全站仪进行三角高程测量的方法因其不受地形影响施测速度快等优点而被越来越多的工程测量技术人员所关注和应用全站仪三角高程测量是测量中的一种重要方法通过研究全站仪三角高程测量的方法并进行分析对于提高测量的精度具有重要的意义全站仪三角高程测量可以少受地形限制在山区高架桥深基础施工高程放样中全站仪三角高程测量具有水准测量无法比拟的优越性可以用于路桥涵墩台深基础的施工高程测量提高了精度效率对各种施工条件下的三角高程测量方法高程放样测量后方交会三角高程测量悬高测量等进行了介绍和探讨实践表明全站仪三角高程测量完全可以取代三四等水准测量并有取代二等水准仪的趋势第二章全站仪三角高程测量21全站仪的介绍与使用随着科学技术的不断发展由光电测距仪电子经纬仪微处理仪及数据记录装置融为一体的电子速测仪简称全站仪正日臻成熟逐步普及这标志着测绘仪器的研究水平制造技术科技含量适用性程度等都达到了一个新的阶段全站仪是指能自动地测量角度和距离并能按一定程序和格式将测量数据传送给相应的数据采集器全站仪自动化程度高功能多精度好通过配置适当的接口可使野外采集的测量数据直接进入计算机进行数据处理或进入自动化绘图系统与传统的方法相比省去了大量的中间人工操作环节使劳动效率和经济效益明显提高同时也避免了人工操作记录等过程中差错率较高的缺陷全站仪的厂家很多主要的厂家及相应生产的全站仪系列有瑞士徕卡公司生产的 TC 系列全站仪日本 TOPCN 拓普康公司生产的 GTS 系列索佳公司生产的SET 系列宾得公司生产的 PCS 系列尼康公司生产的 DMT 系列及瑞典捷创力公司生产的 GDM 系列全站仪我国南方测绘仪器公司 90 年代生产的 NTS 系列全站仪填补了我国的空白正以崭新的面貌走向国内国际市场全站仪的工作特点1能同时测角测距并自动记录测量数据2设有各种野外应用程序能在测量现场得到归算结果3能实现数据流仪GTS-710图4为蔡司Elta R系列工程全站仪图5为徕卡TPS1100系列智能全站仪全站仪几种测量模式介绍1角度测量模式2距离测量模式 3坐标测量模式 Hahab上式中 H b 为未知点高程H a 为已知点高程或设站点高程h a b 为 A B 两点间高差hab i-vS × cosaf其中 h 为两点间的高差i 为仪器高v 为棱镜高即标高S 为两点间的斜距a 为垂直角即天顶距考虑到地球曲率和大气折光对观测值得影响我们加了个改正数 f即前人已证明两点间的水平距离与大地水准面上的弧长相差很小可用 S 代替同时△ h 比地球半径 R 小的多可略去不计故上式可写成当s 10Km时h 78当s 100Km时h 078mm从上述计算表明地球曲率的影响对高差而言即使在很短的距离内也必须加以考虑2 大气折光的影响 r由于空气密度随所在点的位置的高程而变化越是高空其密度越稀当光线通过由下而上密度均匀变化着的大气层时光线产生折射这便是大气折光的影响因折光曲线的形状随着空气的密度不同而变化而空气密度除与所在点的高程大小这个因素有关外还受气温气压等气候条件的影响在一般的测量工作中近似地把折光曲线看作圆弧其半径 R ′地平均值为地球半径的六到七倍若设 R ′≈ 6 R 则根据与 p 值同样的推理可写出3 高差改正数 f通常我们令f p-r则下表一列出了不同距离 S 时的地球曲率与大气折光的影响 f 的值s f s f s f s f 390 001 1292 011 1785 021 2169031 551 002 1349 012 1827 022 2204 032 675 003 1404 013 1868 023 2238 033 779 004 1458 014 1908 024 2272 034 871 005 1509 015 1948 025 2305 035 954 006 1558 016 1986 026 2337 036 1030 007 1606 017 2024 027 2370 037 1102 008 1653 018 2061 028 2401 038 1168 009 1698 019 2098 029 2433 039 1232 010 1742 020 2134 010 2464 040第三章全站仪三角高程测量的方法31 单向观测全站仪单向三角高程测量如图1 所示其中A为已知高程点 B 为待测高程点将全站议安置于A点量得仪器高为i 将反光棱镜置于B 点量得棱镜高为v 由图1 可得A B 两点间的高差计算公3-1-1式中 hAB 为A B 两点的高差 S 为斜距a为竖直角 c 为地球曲率改正数 r 为大气折光系数改正数其中cr 的计算公式为式中 R 为地球半径 K 为大气折光系数 S D 分别为仪器到棱镜的斜距和平距其他符号意义同前因此全站仪单向三角高程测量的计算公式为3-1-2图一三角高程测量单向观测原理示意图32双向观测双向观测又称为往返观测其观测原理与单向观测相同将全站仪置于 A 点棱镜置于B 点测得AB 两点间的高差hAB hAB 称为往测高差再将全站仪置于B 点棱镜置于A 点测得BA 两点间的高差hBA hBA 称为返测高差往返两次观测高差的平均值即可作为最终的测量结果往测计算公式3-2-1返测计算公式3-2-2式中 S往S返a 往和a返分别为往返观测的斜距和竖直角 i 往i返v 往和v返分别为往返观测的仪器高和棱镜高 K 往和K 返分别为往返观测时的大气折光系数在全站仪进行往返测量时如果观测是在相同气象条件下进行的特别是在同一时间进行则可假定大气折光系数对于反向观测基本相同因此又和同是AB 两点间的平距也可认为近似相等即有3-2-2从式 1 2 可得对向观测计算高差的基本公式为3-2-4式中符号意义同前33 中间自由设站观测如图2 所示在已知高程点A 和待测高程点B上分别安置反光棱镜在A B 的大致中间位置选择与两点均通视的O 点安置全站仪根据三角高程测量原理OA 两点的高差h 1 为3-3-1式中 S1a1 分别为O 至A 点的斜距和竖直角 c1r1 分别为O 至A 点的地球曲率改正数和大气折光系数改正数 i 为仪器高 v1 为 A 点的棱镜高因此代入地球曲率改正数大气折光系数改正数计算公式并设K 1 为O 至A 点的大气折光系数 R 为地球半径则式 1 可表达为3-3-2同理可得OB 两点的高差h2 为3-3-3式中 S22 分别为O 至B 点的斜距和竖直角 c2r 2分别为O 至B 点的地球曲率改正数和大气折光系数改正数 K 2 为O 至B 点的大气折光系数 i 为仪器高 v2 为 B 点的棱镜高 R 为地球半径根据高程测量原理 A B 两点间的高差h 为3-3-4式中符号意义同前图2 全站仪自由设站测量的原理图第四章误差分析41 影响误差的因子在野外观测时三角高程的测量精度主要受边长的测量误差垂直角观测误差仪器高和棱镜高的量测误差大气折光误差的影响1边长测量中误差S m 的影响在实测中采用日本拓普康GTS-300 全站仪其标称精度为3mm 2 ppmiD mm 于是全站仪观测边长的中误差3 2 S m mm ppmiD2垂直角观测误差mα的影响垂直角观测误差mα对高差的影响随边长D 的增大而增大垂直角的观测误差主要有照准误差读数误差气泡居中误差以及对外界空气对流和空气能见度影响造成的误差由于人眼的辨力为 60 在工作中垂直角用红外全站仪观测两个测回则准误差V 为望远镜放大倍数读数误差m ±10 读气泡居住那个误差m ±03 汽外界空气对流和空气能见度对垂角影响m空虽然不能用公式计算但根据观测经验可以估算其值可以取m ±03 空由以上分析得到一测回垂直角观测误差两测回平均值中误差3仪器高和棱镜高量测误差对高差的影响仪器高和棱镜高采用2m 钢卷尺直接量取由于观测采用三联脚架法所以只需在高程点观测开始及结束后量取仪器高和棱镜高量测误差主要有钢卷尺标定误差和读数误差标定误差和读数误差都小于05mm且在量取仪器高和棱镜高时钢卷尺要分上下标定和读数则由误差传播定律可得于是量取仪器高和棱镜高的误差对单向观测高差的影响4大气折光误差对高差的影响大气折光误差系数k 随地区气候季节地面覆盖物和视超出地面高度等因素而变化目前还不能精确测定k 的数值为了解决这个问题采用对向观测法用往返测单向观测值取平均值得到的对向观测中就不含有大气折光系数k 的影响因此在讨论大气折光误差时只考虑k 值变化对单向高差的影响有实验表明k 值在一天内的变化以日出日落时变化较快数值误差也较大中午前后比较稳定数值误差也很小因此垂直角的观测时间最好选在当地时间1000~1600 之间进行此时k 值约在008~04 之间取k=011可计算得出上述时间内大气折光系数k 的变化对垂直角观测的影响k m ± mm42 误差分析com单向三角高程测量的中误差根据误差传播定律对式 3-1-2 进行微分并转变为中误差关系式则式3-1-2 可变为式中 mhmSma分别为A B 两点间高差中误差斜距中误差竖直角中误差 mK 为大气折光系数测量中误差 mi 为仪器高量取中误差 mv 为棱镜高量取中误差为将角值化成弧度值其他符号意义同前考虑到当S 1 000 m 时并且K 值在我国约为0 08 0 14 故和的值约为10- 2 mm 可以忽略不计则上式可简化为com 全站仪对向三角高程测量的中误差根据误差传播定律对式 3-2-4 进行微分并转变为中误差关系式则式3-2-4 可变为4-2-2-1式中 m h 为往返观测平均高差中误差 mS往mS返m往和m返分别为往返斜距和坚直角中误差 mi往mi返mv往和mv返分别为往返仪器高和棱镜高量取中误差其他符号意义同前由于仪器和观测条件相同可取m往 m返 m mS往 mS 返 mS S往 S返S mi往 mi返 mv往 mv返 m a往 a返 a于是式 11 可简化为4-2-2-2对式 12 进行开平方则com 全站仪中点法高程测量的中误差根据误差传播定律对式3-3-4进行微分并转变为中误差关系式则式3-3-4可变化为4-2-3-1 式中为A B 两点间高差中误差和分别为O 至A 点的斜距和竖直角中误差和分别为O 至A 点的大气折光系数和棱镜量取中误差和分别为O 至B 点的斜距和竖直角中误差和分别为O 至B 点的大气折光系数和棱镜量取中误差其他符号意义同前考虑到当S1 1 000 m S2 1 000 m 时并且K 值在我国约为0 08 0 14式中的值约为10- 2 到10- 3可以忽略不计设D1 S1 cosa1 D2 S2cosa2 D1D2 分别为O 至A B 的水平距离则式 13 可写成4-2-3-2在同一地点进行测量短时间内K 值的变化很小又因全站仪中点法测量几乎是在相同观测条件下进行的故可近似地假定K 1 K 2 并设mK1mK2 mK 考虑全站仪的特点设边长的测量精度mS坚直角的测量精度ma及棱镜高的量取度mv 相等则式 14 可写成4-2-3-3式中 mh 为全站仪中点法高程测量的中误差 mSma分别为全站仪斜距坚直角测量的中误差 mK为大气折光系数测定的中误差 mv为棱镜高量取中误差由式15 可知全站仪中点法高程测量误差与仪器精度 mS ma 大气折光系数误差mK 及棱镜高量取误差mv 等有关为了对全站仪高程测量的 3 种方法进行验证分析各种方法的精度本研究选取 m ±2 精度的全站仪为例其测距精度为取mm 按全站仪到测点的测距1 km计算有试验证明大气折光系数的误差为±0 030 05mm文中取± 0 04mm 仪器高和棱镜高的量取误差取mi mv ±mm同时取2倍的中误差为极限误差与三四等水准测量的限差进行比较分析其计算数据如表1所示其中在计全站仪中点法高程测量极限误差时取前后视距近视相等往返观测竖直角相等表二全站仪高程测量的极限误差与三四等水准误差的比较测量距离m 方法极限误差三等水准限差四等水准限差1°2°5°10°15°20°30°100 单向598 599 602 613 631 654 713 379 632 对向423 423 426 433 446 463 504 中点582 583 590 614 652 699 812 200 单向686 687 689 697 710 727 770 537 894 对向485 485 487 493 502514 544 中点629 630 636 659 694 738 846300 单向813 814 815 819 825 834 858 657 1095 对向574 574 575 578 583 589 606 中点700 701 707 727 759 800 900 500 单向1133 1133 1132 1129 1123 1115 1095 849 1414 对向794 794 793 791 787 783 770 中点891 891 896 912 938 971 1055 600 单向1313 1313 1311 1304 1292 1277 1235 930 1549 对向915 915 913 909 902 892 865 中点1002 1002 1006 1021 1044 1074 1150 800 单向1699 16991695 1681 1658 1627 1541 1073 1789 对向1168 1167 1165 1156 1142 1123 1069 中点1243 1243 1246 1258 1276 10301 1365 1000单向2115 2114 2108 2087 2053 2006 1877 12002000 对向1428 1428 1424 1421 1391 13631285 中点1500 1500 1503 1513 15281549 1603 1200 单向2559 2558 2550 2522 2475 2411 2336 1315 2191 对向1693 16931688 1672 1646 1609 1507 中点17691770 1772 1780 1793 1811 1857由表 2 可知 3 种测量方法中对向观测的误差最低精度最好中点法测量次之单向高程测量精度最差但在全站仪中点法测量中若前后棱镜高用强制对中杆取相同减少棱镜量取误差则有进一步提高精度的空间3种高程测量方法中对向观测和中点法观测方法在距离小于1 200 m及测角小于30 时其测量精度可满足四等水准精度要求而单向观测距离小于800 m 时才满足四等水准精度要求当距离小于600 m大于200 m 竖直观测角小于 30 时对向观测可满足三等水准测量精度要求结论与展望我们知道全站仪测量与水准测量相比有很多优势比如全站仪三角高程测量不受观测地形的限制测站数少能减轻劳动强度提高作业速度具有较强的灵活性与实用性尤其是在丘陵地带或山区的测量以及在高差和坡度较大的测量中有较大的优越性通过以上章节的介绍与分析我得出以上的结论用全站仪三角高程测量方法代替水准测量方法简单易行测量速度较传统方法快的多为今后快速准确建立高程控制网提供了又一新的途径采用全站仪中点法测量高程相邻两点间可以不通视可灵活选取测站点位置测站不需对中不量仪器高可节约时间降低劳动强度较对向观测更具明显优势若要进一步提高精度尽量使前后视距相等全站仪单向高程测量时尽量进行近距离观测同时竖直角不能太大并进行盘左盘右观测可消除一些系统误差的影响并一定范围内可代替四等水准测量全站仪 3 种高程测量的误差都随观测距离和竖直角的增大而增加并与测边精度和测角精度有关因此为提高测量精度可适当增加测回数以提高距离和竖直角的观测精度单向观测可以在工程测量以及建筑物变形监测或大型构件的安装定位测量中使用精度更高在观测结果中加地球曲率和大气折光改正提高竖直角观测精度选择合适的测站点等可使全站仪三角高程测量观测精度达三四等水准测量双向观测可以应用在点位精度要求高高差大相邻点间距离在1km范围内的工程控制网或变形监测网点的高程测量之中仪器安置在有强制对中装置的观测墩上选点时考虑相邻点间水平距离及高度角满足一定的条件下对向观测法全站仪三角高程测量可代替三四等水准测量中间观测法全站仪三角高程与对向观测法相比中间观测法不必量取仪器高和棱镜高减少了误差来源提高了精度测站点选在中间还能够有效地减弱或消除地球曲率和大气折光对高差测量的影响又进一步提高了精度但当两观测点间的水平距离小于或等于1 km时对向法三角高程测量精度较中间法三角高程测量精度要高当两观测点间的水平距离大于1km时中间法三角高程测量精度较对向法三角角高程测量精度要高在长距离地形变化较大的区域高程测量中可选择用中间法三角高程测量其精度可达三四等水准测量精度在提高观测条件的情况下理论上可达二等水准测量精度通过对全站仪三角高程测量的方法与误差进行分析比较我们可以得出哪种方法在哪种情况下进行测量得出的精度更高通过研究我们得出了结论全站仪三角高程测量较普通水准测量有着十分明显的优势在精度要求不高的情况下全站仪三角高程测量替代水准测量不仅能够提高工作效率减少工作量而且其精度足够达到三四等水准测量的精度要求三角高程测量在我国国民经济与建设中有着非常重要的作用我通过研究三角高程测量可以为我以后的工作提供很重要的帮助通过研究实践我们已经知道全站仪三角高程测量完全可以取代三四等水准测量在一定条件下有取代二等水准测量的趋势希望随着科学技术的发展在不久的将来全站仪三角高程测量可以取代二等水准测量参考文献1测量学测绘出版社武汉测绘科技大学测量学编写组 20002数字化成图理论方法与实践西安地图出版社邹时林谢成刚 20085 3控制测量学孔祥元郭际明武汉大学出版社 20024工程测量学张正禄等武汉大学出版社 2005105误差理论与测量平差基础武汉大学测绘学科测量平差学科组 20036陶海生全站仪应用于高程测量之精度探讨[ J] 中南公路工程 2003 28 3 59 617圣少兵全站仪EDM 三角高程测量及其精度分析[ J] 辽宁科技学院学报 2007 7 3 15 168刘丽霞乔万亮佟艳丽利用全站仪进行三角高程测量的中误差计算[ J] 黑龙江水专学报 2005 32 2 59609刘惠明张波陈俊林全站仪中点法高程测量及其精度探讨[ J] 华南农业大学学报 2004 10 4 102106致谢四年的大学生活即将结束在这四年中我学到了不少了专业知识和做人的道理同时也学会了独立生活和怎样与人相处四年的求学生涯在师长亲友的大力支持下走的很辛苦却也收获满囊在论文即将付梓之际思绪万千心情久久不能平静我的指导老师陈伟在我写论文的时候给予了我很多帮助和指导从论文题目的选定到论文写作的指导您不厌其烦的为我认真讲解遇到问题请教您总说能在第一是时间教我怎样去思考解决问题教会我认真负责虚心求教态度严谨是我人生中的良师益友同时毕业之际特别感谢我的爸爸妈妈对我的养育之恩由一个农村家庭默默支撑着我读完大学鼓励我走好我的求学路看着苍老的父母心里默默决心以后努力工作好好孝敬爸爸妈妈从开始进入选题到论文的顺利完成有多少可敬的师长同学朋友给了我无言的帮助在这里请接受我的诚挚谢意同时也感谢学院为我提供了良好的做毕业设计的坏境再一次感谢所有在毕业设计中曾帮助过我的老师和同学以及在设计中被我引用的论著的作者最后希望母校南昌工程学院有个更加美好辉煌的明天4I第一章绪论南昌工程学院本科毕业论文第二章全站仪三角高程测量第三章全站仪三角高程测量的方法。