自适应滤波器MATLAB仿真
自适应滤波器原理及matlab实现

自适应滤波器原理及matlab实现一、自适应滤波器概述自适应滤波器是一种特殊的滤波器,它能够根据信号的变化自动调整自身的特性,以更好地处理信号。
自适应滤波器在许多领域都有广泛的应用,例如通信、信号处理、语音识别等。
二、自适应滤波器原理自适应滤波器的原理基于最小均方误差(MMSE)准则。
它通过不断调整自身的系数,使得输出信号的误差最小,从而更好地匹配输入信号。
自适应滤波器的性能取决于其系数和输入信号的特点,因此需要根据不同的应用场景选择合适的滤波器。
三、MATLAB实现以下是一个简单的自适应滤波器的MATLAB实现示例:```matlab%定义系统参数n=100;%信号长度alpha=0.01;%学习率w=randn(1,n);%滤波器系数x=randn(n+1,1);%输入信号y=zeros(n+1,1);%输出信号e=zeros(n+1,1);%误差信号%自适应滤波器算法fori=1:ny(i)=w*x(i+1)+e(i);%输出信号e(i)=x(i+1)-y(i);%误差信号w=w+alpha*(x(i+1).^2-y(i).^2)*w-alpha*x(i+1)*e(i);%更新滤波器系数end%绘制滤波器系数随时间变化曲线plot(real(w),'b');holdon;plot([min(x),max(x)],[min(y)-3*std(y),max(y)+3*std(y)],'r');holdoff;xlabel('Time');ylabel( 'FilterCoefficient');legend('FilterCoefficient','SignalError' );gridon;```这段代码实现了一个简单的自适应滤波器,它根据输入信号不断调整自身的系数,以达到更好的匹配效果。
在代码中,我们使用了MATLAB的内置函数和矩阵运算来实现自适应滤波器的算法。
matlab 自适应卡尔曼滤波

matlab 自适应卡尔曼滤波自适应卡尔曼滤波是一种基于卡尔曼滤波算法的扩展,用于跟踪非线性系统的状态。
在传统的卡尔曼滤波中,假设系统是线性的,并且系统的噪声和测量噪声是已知的。
然而,在实际应用中,往往会遇到非线性系统或未知的噪声情况,这就需要使用自适应卡尔曼滤波方法来处理。
自适应卡尔曼滤波的基本思想是通过一种递归算法,根据系统的状态和测量值的变化来调整卡尔曼滤波的参数。
具体步骤如下:1. 初始化卡尔曼滤波模型的参数,包括状态向量、状态转移矩阵、测量矩阵、过程噪声协方差矩阵、测量噪声协方差矩阵等。
2. 根据当前的测量值和状态向量,计算预测的状态向量和状态转移矩阵。
3. 通过当前的测量值和预测的状态向量,计算卡尔曼增益。
4. 更新状态向量和状态协方差矩阵。
5. 根据更新后的状态向量,重新计算过程噪声协方差矩阵和测量噪声协方差矩阵。
6. 重复步骤2到5,直到滤波结束。
自适应卡尔曼滤波的关键在于如何根据当前的测量值和状态向量来调整滤波模型的参数,以适应实际系统的变化。
常见的自适应卡尔曼滤波算法包括扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和粒子滤波等。
在MATLAB中,可以使用现有的工具箱或编写自己的函数来实现自适应卡尔曼滤波。
MATLAB提供了kalmanfilt函数用于实现标准的卡尔曼滤波,同时也可以根据需要自定义滤波模型和参数。
它还提供了ekf, ukf和pf函数分别用于实现扩展卡尔曼滤波、无迹卡尔曼滤波和粒子滤波算法。
下面是一个简单的MATLAB示例,演示了如何使用kalmanfilt函数实现自适应卡尔曼滤波:matlab% 定义系统的状态转移矩阵和测量矩阵A = [1 0.1; 0 1];C = [1 0];% 定义过程噪声协方差矩阵和测量噪声协方差矩阵Q = [0.01 0; 0 0.01];R = 0.1;% 创建kalman滤波器对象kf = kalmanfilt(A, C, Q, R);% 初始化状态向量和状态协方差矩阵x0 = [0; 0];P0 = eye(2);% 生成模拟数据N = 100;x_true = zeros(2, N);y = zeros(1, N);for k = 1:Nx_true(:, k) = A * x_true(:, k-1) + sqrtm(Q) * randn(2, 1);y(k) = C * x_true(:, k) + sqrt(R) * randn(1);end% 使用kalman滤波器滤波数据x_est = zeros(2, N);for k = 1:Nx_est(:, k) = kf(y(k));end% 绘制真实值和估计值的对比图figure;hold on;plot(1:N, x_true(1, :), 'b-', 'LineWidth', 2);plot(1:N, x_true(2, :), 'r-', 'LineWidth', 2);plot(1:N, x_est(1, :), 'k', 'LineWidth', 2);plot(1:N, x_est(2, :), 'm', 'LineWidth', 2);legend('True x1', 'True x2', 'Estimate x1', 'Estimate x2');hold off;以上示例中,定义了一个二维状态向量和一个一维测量向量,并根据这两个向量构建了卡尔曼滤波模型的参数。
自适应滤波器MATLAB仿真
自适应滤波器MATLAB仿真摘要:本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS(Least mean squares)算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS算法Simulate of adaptive filter based on MATLAB7.0Abstract:This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.Key words:LMS algorithm Adaptive Filter Matlab7.01 引言由Widrow B等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
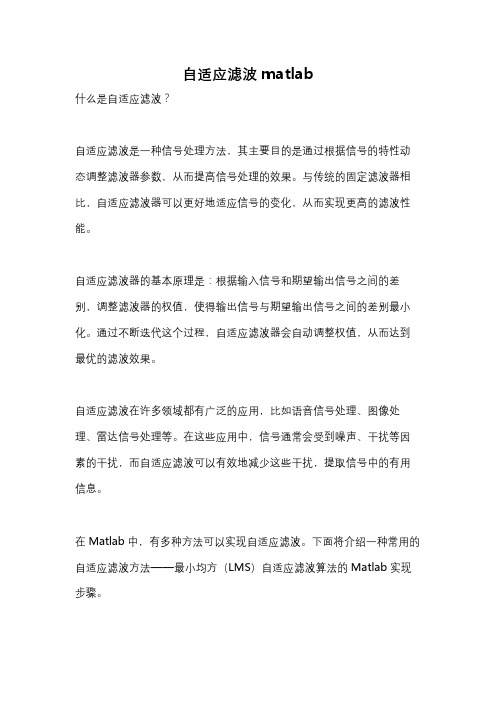
2 自适应滤波原理及LMS算法2.1 自适应滤波原理自适应滤波原理图[2],如图1所示。
图1自适应滤波原理图在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数字滤波器或格型数字滤波器。
自适应滤波分2个过程。
第一,输入信号想x(n)通过参数可调的数字滤波器后得输出信号y(n),y(n)与参考信号d(n)进行比较得误差信号e(n);第二,通过一种自适应算法和x(n)和e(n)的值来调节参数可调的数字滤波器的参数,即加权系数,使之达到最佳滤波效果。
自适应卡尔曼滤波matlab

自适应卡尔曼滤波matlab自适应卡尔曼滤波(Adaptive Kalman Filtering)是一种常用的估计和滤波技术,常用于处理不确定性和噪声存在的系统。
在这篇文章中,我将详细介绍自适应卡尔曼滤波的原理和应用,并探讨如何在MATLAB中实现该算法。
自适应卡尔曼滤波是卡尔曼滤波器的一种扩展形式,它通过动态调整滤波器的参数,以适应不断变化的系统条件和噪声水平。
与传统的卡尔曼滤波相比,自适应卡尔曼滤波具有更好的鲁棒性和适应性。
自适应卡尔曼滤波的关键思想是根据观测数据的特点动态调整系统模型的参数。
在传统的卡尔曼滤波中,系统模型的参数通常是固定的,但在实际应用中,系统的动态特性和外部环境的变化可能导致模型参数的不确定性。
自适应卡尔曼滤波通过监测观测数据的统计特性,自动调整系统模型的参数,以提高滤波器的性能。
在MATLAB中实现自适应卡尔曼滤波可以分为以下几个步骤:1. 定义系统模型:首先需要定义系统的状态变量、测量变量以及系统的状态转移方程和测量方程。
这些方程描述了系统的动态特性和观测模型。
2. 初始化滤波器:在开始滤波之前,需要初始化滤波器的状态向量和协方差矩阵。
状态向量表示系统的状态变量,协方差矩阵表示对状态变量估计的不确定性。
3. 预测步骤:根据系统的状态转移方程和当前的状态估计,进行状态的预测。
预测的结果是对系统下一时刻状态的估计。
4. 更新步骤:根据测量方程和当前的观测值,更新状态估计和协方差矩阵。
更新的结果是对系统当前状态的更准确估计。
5. 自适应调整:根据观测数据的统计特性,自适应地调整滤波器的参数。
这个步骤是自适应卡尔曼滤波与传统卡尔曼滤波的主要区别之一。
自适应卡尔曼滤波在许多领域都有广泛的应用。
例如,在目标跟踪中,通过自适应调整滤波器的参数,可以更好地适应目标运动的变化和观测噪声的不确定性。
在信号处理中,自适应卡尔曼滤波可以用于去除信号中的噪声和干扰,提高信号的质量。
自适应卡尔曼滤波是一种强大的估计和滤波技术,能够有效处理不确定性和噪声存在的系统。
基于Matlab的自适应滤波器的设计及仿真
基于Matlab的自适应滤波器的设计及仿真赵夏爽物理与电子信息学院电子信息科学与技术专业学号:130522036指导教师:燕慧英摘要:自适应滤波器的研究是当今信号处理中最活跃的研究课题之一。
自适应滤波器因其具有很强的自学习、自跟踪能力和算法的简单易实现性等优越性能,已经在数字通信、工业控制和雷达等领域获得了广泛应用。
首先介绍了自适应滤波器的基本理论思想,具体阐述了自适应滤波器的基本原理、算法及设计方法。
接着对自适应滤波器的核心算法——最小均方误差(LMS)进行介绍和分析,最后基于LMS算法设计自适应滤波器并进行MatLab仿真,仿真结果表明设计的自适应滤波器具有良好的性能和较强的可操作性。
关键词:自适应滤波器;LMS算法;matlab仿真Design and Implemeutation of the Auto-adapted FilterZhao xia-shuangCollege of Physics and Electronic Information Electronic Information Science and TechnologyNo:130522036Tutor:YanHui-yingAbstract:The research of adaptive filter is one of the most active research topic in signal processing.Adaptive filter because of its strong self-learning,self tracking ability and simple algorithm of superior performance and easy to implement,has been widely used in digital communication,industrial control and other fields of radar.Firstly introduces the basic theory of adaptive filter,expounds the basic principle,algorithm and adaptive filter design method.The core algorithm of the adaptive filter--minimum mean square error(LMS)were introduced and analyzed,based on the design of adaptive LMS filter algorithm and MatLab simulation,the simulation results show that the design of adaptive filter has good performance and strong operability.Keywords:adaptive filter;LMS algorithm;MATLAB simulation目录1引言 (3)1.1国内外研究现状与前景 (3)1.2课题研究的意义和目的 (4)2自适应滤波器理论基础 (4)2.1滤波器的基本概念 (4)2.2自适应滤波器的结构 (5)2.3自适应滤波器原理 (5)2.4自适应滤波器的LMS算法 (6)3自适应滤波器设计及仿真 (7)3.1LMS算法参数分析 (7)3.2自适应滤波器的仿真 (7)3.2.1Matlab软件介绍 (7)3.2.2基于LMS算法实现的流程图 (8)3.2.3自适应滤波器的仿真结果及分析 (9)4总结 (12)参考文献 (12)1引言滤波技术是信号处理的一项重要技术,利用这种技术可以抑制信号中的干扰,获取需要的信息。
自适应滤波器原理及matlab仿真应用 相关代码

自适应滤波器原理及matlab仿真应用相关代码文章标题:深度解析自适应滤波器原理及matlab仿真应用1. 引言自适应滤波器是数字信号处理中的重要概念,它可以根据输入信号的特性动态地调整滤波器的参数,从而更好地适应信号的变化。
本文将深入探讨自适应滤波器的原理以及在matlab中的仿真应用,帮助读者深入理解这一重要的概念。
2. 自适应滤波器原理自适应滤波器的原理基于最小均方误差准则,它通过不断调整权值参数,使得滤波器输出与期望输出的误差达到最小。
这一原理可以应用在很多领域,如通信系统、雷达系统以及生物医学工程中。
自适应滤波器能够有效地抑制噪声,提高信号的质量。
3. Matlab仿真应用在matlab中,我们可以利用现成的自适应滤波器函数来进行仿真实验。
通过编写相应的matlab代码,我们可以模拟各种不同的信号输入,并观察自适应滤波器的输出效果。
这对于理论学习和工程应用都具有重要意义。
4. 深入理解自适应滤波器我们可以通过探讨自适应滤波器的各种类型、参数选择以及性能评价指标,来深入理解这一概念。
LMS算法、RLS算法以及SVD方法都是自适应滤波器中常见的算法,它们各自适用于不同的场景,并且有着各自的优缺点。
了解这些算法的原理及应用可以帮助我们更好地理解自适应滤波器的工作机制。
5. 个人观点和总结个人观点:自适应滤波器在现代信号处理中具有极其重要的应用价值,通过对其原理的深入理解和matlab中的仿真实验,我们可以更好地掌握这一概念。
在实际工程中,合理地选择自适应滤波器的类型和参数,并结合matlab仿真,可以提高工程设计的效率和准确性。
总结:通过本文对自适应滤波器原理的深入解析和matlab的仿真应用,希望读者能够更好地理解这一重要概念,并且能够在工程实践中灵活应用。
自适应滤波器是数字信号处理中不可或缺的工具,深入掌握其原理和应用对于提高工程设计的水平具有重要意义。
6. 结束语自适应滤波器原理及matlab仿真应用是一个复杂而又精彩的领域,相信通过不断地学习和实践,我们能够更好地理解和应用这一概念。
自适应滤波器原理及Matlab仿真应用_引言
相较于非迭代方法,迭代方法 具有4个优点
03
自适应滤波器结构
横向结构
输出是输入序列时延样本的线性
01
组合产生的
线性组合器
输出是抽头输入所接收的不同信号的一
个线性组合
02
横向结构是线性组合器的一种特殊情形
04
格型结构
需要实现全极点滤波器时,格型 结构更容易受控以防止不稳定
IIR滤波器
03
在自适应滤波器领域的应用有限
202 0
讲解完毕 谢谢欣赏
自适应滤波器原理及Matlab仿真应用
Created by Wu Pan
自适应滤波器原理及Matlab仿真应用
Adaptive Filters Theory and Applications
(原书第2版)
(Second Edition)
第一章 引言
Introduction
系统 为什么不叫自适应系统
自适应 概念
系统试图调节其参数来达到由系统自身状态和外围 参数所确定的某个明确定义的目标。此外,还需要
统计方法
最常用的性能函数是误差信号的 均方值
确定方法
性能函数一般是误差信号平方的 加权和
02
自适应滤波器
随机性方法
维纳滤波器的设计需要相关信号 的先验统计知识
确定性方法
需要利用滤波器应该处理的给 定数据集计算一定的平均量
设计方法
随机性方法 确定性方法
近似假设
假定信号序列是各态历经的 利用时间平均
基带信号为复值
频域
滤波器算法必须以复值变量来描 述
06
应用
逆建模
又称为反卷积,如均衡器、信道 均衡、磁记录
自适应滤波matlab
自适应滤波matlab什么是自适应滤波?自适应滤波是一种信号处理方法,其主要目的是通过根据信号的特性动态调整滤波器参数,从而提高信号处理的效果。
与传统的固定滤波器相比,自适应滤波器可以更好地适应信号的变化,从而实现更高的滤波性能。
自适应滤波器的基本原理是:根据输入信号和期望输出信号之间的差别,调整滤波器的权值,使得输出信号与期望输出信号之间的差别最小化。
通过不断迭代这个过程,自适应滤波器会自动调整权值,从而达到最优的滤波效果。
自适应滤波在许多领域都有广泛的应用,比如语音信号处理、图像处理、雷达信号处理等。
在这些应用中,信号通常会受到噪声、干扰等因素的干扰,而自适应滤波可以有效地减少这些干扰,提取信号中的有用信息。
在Matlab中,有多种方法可以实现自适应滤波。
下面将介绍一种常用的自适应滤波方法——最小均方(LMS)自适应滤波算法的Matlab实现步骤。
首先,在Matlab中,我们可以使用内置的函数“nlms”来实现LMS自适应滤波。
nlms函数的语法如下:matlaby = nlms(x, d, L, mu)其中,x是输入信号,d是期望输出信号,L是滤波器的长度,mu是步长因子。
接下来,我们需要准备输入信号和期望输出信号。
可以使用Matlab中的随机数函数来生成一个输入信号,例如:matlabN = 1000; 输入信号长度x = randn(N, 1);假设我们期望输出信号是输入信号的加权和,可以定义一个权值向量w,然后计算期望输出信号:matlabw = [0.3, 0.5, 0.2]; 权值向量d = filter(w, 1, x);在这里,使用filter函数可以将输入信号与权值向量进行卷积,得到期望输出信号。
接下来,我们可以使用nlms函数来实现自适应滤波。
首先,我们需要初始化滤波器的权值向量w0,可以将其设为全零向量:matlabw0 = zeros(L, 1); 初始权值向量然后,我们可以调用nlms函数进行自适应滤波:matlaby = nlms(x, d, L, mu);其中,L是滤波器的长度,mu是步长因子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应滤波器 MATLAB仿真
摘要 : 本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS( Least mean squares )算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS 算法
Simulate of adaptive filter based on MATLAB7.0
Abstract: This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.
Key words: LMS algorithm Adaptive Filter Matlab7.0
1引言
由 Widrow B 等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
2自适应滤波原理及 LMS算法
2.1 自适应滤波原理
图 1 自适应滤波原理图
在自适应滤波器中,参数可调的数字滤波器一般为 FIR 数字滤波器, IIR 数字滤波器或格型数字滤波器。
自适应滤波分 2 个过程。
第一,输入信号想 x(n) 通过参数可调的数字滤波器后得输出信号 y(n) ,y(n) 与参考信号 d(n) 进行比较得误差信号 e(n) ;第二,通过一种自适应算法和 x(n) 和 e(n) 的值来调节参数可调的数字滤波器的参数,即加权系
数,使之达到最佳滤波效果。
2.2 LMS 算法及相关参数的选择
LMS 算法最核心的思想是用平方误差代替均方误差 [2] 。
因此该算法简化了计算量。
在自适应噪音抵消系统中 ,如自适应滤波器参数选择不当 ,就达不到应有的滤波效果 , 而 且还可能得到适得其反的效果。
因此针对不同的信号和噪声应选择相应的参数 [3]。
可见, 参数的选择对滤波效果是至关重要的。
下面仅以 L 阶加权自适应横向滤波器为例,推导 LMS 算法的公式。
L 阶加权自适应横向滤波器,如图 2 所示。
LMS 算法公式推导:
而最陡下降法迭代计算全矢量公式: w n 1 w n
公式( 4)中 为控制稳定性和收敛速度的参数。
由公式( 3)和公式( 4)得: w n 1 w n 2 e n x 公式( 5)说明了 LMS 算法的核心是用每次迭代的粗略估计值代替了实际的精确值, 这样大大简化了计算量,但是不可否认,加权系数不可能准确的沿着理想的最陡下降路 径来调整自身的参数,而加权系数与 μ有着密切的关系。
因此,适当的选择自适应滤波 器性能参数 μ显得格外重要。
w n w 0 n w 1 w L n
;其中 x n 为输入信号, w n 为加权系数。
误差信 号: e n d n y n d(n) x T n w n d(n)
w T
n xn (1) 公式( 1)中 d (n ) 为参考信号, y (n ) 为输出信号。
误差信号均方值: 号, n E e 2 n (2)
由公式( 1)和公式 2)得:
均方误差性能曲面的梯度: n
2e w en n 2e n x n w (3)
(4) (5)
图 2 L 阶加权自适应横向滤波
3MATLAB7.0 仿真
本例通过设计一个二阶加权系数自适应横向 FIR 滤波器,对一正弦信号加噪声信号进行滤波[4]。
为了实现该功能,得先生成一个标准正弦波信号 s(n) 和一个随机噪声信号n(n), 然后将 s(n) 与 n(n) 相加就得到了加噪后的正弦信号 x(n), 再依照由 LMS算法推导出来的公式( 5),设计自适应滤波算法,对噪声干扰信号进行滤波,最后得到滤波后的信号e(n), 实现程序代码如下:
clear
t=0:1/10000:1-0.0001;% 设置迭代次数
s=sin(2*pi*t);% 标准正弦信号
n=randn(size(t));% 与时间 t 等长随机信号
x=s+n;%加噪信号
w=[0,0.5];% 初始 2 阶加权系数
u=0.00026;%最佳参数
for i=1:9999;% 自适应算法
y(i+1)=n(i:i+1)*w';
e(i+1)=x(i+1)-y(i+1);
w=w+2*u*e(i+1)*n(i:i+1);
end;
%画图程序
figure(1)
subplot(4,1,1)
plot(t,n);
title('Noise signal');xlabel('t');ylabel('n(t)');
subplot(4,1,2)
plot(t,s);
title('Sinusoidal signal');xlabel('t');ylabel('s(t)');
subplot(4,1,3)
plot(t,x);
title('Sinusoidal signal with noise');xlabel('t');ylabel('x(t)');
subplot(4,1,4)
plot(t,e);
title('the result of filtering');xlabel('t');ylabel('e(t)');
图3 μ取0.00026 时的滤波效果图
当 μ取 0.00026 时得到的效果较好。
前面一段时间较模糊是因为滤波器参数还没有 调整到最佳,如图 3 所示。
由图可知当 t 取 0.5 时,已经找到了最佳加权系数。
图4 μ取0.000026时的滤波效果图
当 μ取 0.000026 时,滤波结果几乎呈直线,而且线条很粗,说明寻找加权系数
的 速度太慢了,如图 4 所示。
图5 μ取0.26 时的滤波效果图
当 μ取 0.26 时,结果也是呈直线状,而且线条很细,有的地方还有毛刺,说明系 统参数变化太快,系统还没有调整到最佳加权系数,如图 5 所示
图 6 μ取 1 时的滤波效果图
当 μ取 1 时,系统输出混乱,如图 6 所示。
实验结果表明:不同的 μ值得到的滤波效果是不同的。
通过实验数据观察得出:μ 偏大时, 自适应时间越短 ,自适应过程越快 , 但它引起的失调也越大 ,所以导致滤波结果
很模糊,输出信号变化较大,当μ大于某个值时 , 系统输出混乱 ;μ偏小时 ,系统比较稳 定,输出信号变化小,失调也小 , 但自适应过程却相应加长了 ,因此参数μ的选择应从整 个系统要求出发 , 在满足精度要求的前提下 , 尽量减少自适应时间。
最后,通过取合适的 μ,改变w(n) 的初始值,总可以找到最佳的加权系数。
本程序 中迭代次数为 10000。
因此,得出结论:当 μ一定,迭代次数很大时,加权系数总可以 找到最优解。
以下是 W(n)初始值变化时的图像。
图 11 W(n)= [0.5 ,
0.5]
图 7 W(n)=[0 , 0]
图9 W(n)= [0 ,1]
图 10 W(n)= [0.5 , 0]
图 13 W(n)= [1 , 0]
图 15 W(n)= [1 , 1]
4 总结 通过这个例子,使我了解了自适应滤波器的工作原理,以及如何使用自适应滤波 器去做信号处理的工作。
MATLA 在B 数字信号处理仿真方面有着强大的功能,通过这次实 验,再次温习了一些指令的用法。
这个实验中还有一个问题是值得注意的,那就是如何 寻找μ。
FIR 滤波器以其稳定和容易实现严格的线性相位,使信号处理后不产生相位畸 变,而在实际中获得广泛的应用 [5]。
参考文献
[1] 叶华,吴伯修.变步长自适应滤波算法的研究 [J]. 电子学报 , 1990,18(4):63-69.
[2] 姚天任 ,孙洪.现代数字信号处理 [M]. 武汉:华中科技大学出版社 ,1999.
[3] 吴轶刚 ,范猛.自适应滤波器参数选择和仿真结果 [J].吉林工学院学报 ,2001,22(2):25-29.
[4] 罗军辉等 .MATLAB7.0 在数字信号处理中的应用 [M]. 北京:机械工业出版社, 2005.
[5] 张亚妮 .小波视频图像处理技术 [J]. 辽宁工程技术大学学报
, 2004,23(2): 230-232.。