神经网络自适应线性神经元Adaline的LMS算法
人工神经网络第三0部分线性自适应
ADALINE
w1 p1 p2 w2 a n q b e F
wm
pR LMS 算法
+ 目标响应
ADALINE是一个自适应可调的网络,适用于信号处理 中的自适应滤波、预测和模型识别。自适应线性神经元模 型如图所示,它有两个输出量,a是模拟输出量,q是数字 输出量;实际应用时,往往还将目标响应t与模拟输出量a 的误差e = t - a作为输出。
线性神经网络的学习
e(k ) (t a(k )) (t ( W1, j (k )p b(k ))) p W1, j (k ) W1, j (k ) W1, j (k )
对于单个线性神经元: a(k ) W1, j (k )p b(k )
e(k ) (t a(k )) (t ( W1, j (k )p b(k ))) 1 b(k ) b(k ) b(k )
线性神经网络模型
输入 p1 p2 pR 神经元
线性神经元模型
线性神经网络模型
输入向量 P S1R IW1 输入层神经元 a1 n1 S11 S1
w1,1 w1, 2 w1, R b
n f
a
R1 1 R
+ b
1
S11
S11
线性神经网络层的输出为: a purelin ( Wp b) Wp b 线性神经网络层的输出可以取任意值,克服了感知器神 经网络的输出只能取0或1的不足。另外,一般感知器神经网 络是单层的,而线性神经元网络可以是多层的。但线性网络 和感知器神经网络一样只能求解线性问题。
只能得到近似解,只有当输入模式线性无关时,
LMS算法才可以使误差函数为零 .
线性神经网络
5.4.2 学习算法
学习算法要与网络的结构特点相适应。感知器的学习算法是最早提出的可收敛的算 法,LMS 算法与它关系密切,形式上也非常类似。它们都采用了自适应的思想,这一点在 下一章要介绍的 BP 神经网络中获得了进一步的发展。 在计算上,从表面看 LMS 算法似乎与感知器学习算法没什么两样。这里需要注意一 个区别:LMS 算法得到的分类边界往往处于两类模式的正中间,而感知器学习算法在刚刚 能正确分类的位置就停下来了,从而使分类边界离一些模式距离过近,使系统对误差更敏 感。这一区别与两种神经网络的不同传输函数有关。
其中 为学习率, 为梯度。上式还可以进一步整理为以下形式
·131·
第2篇
原理篇
ω(n 1) ω(n) x T (n)e(n)
T ω(n) x T (n) d (n) x (n)ω(n) T T T I x (n) x (n) ω(n) x (n)d (n)
渐下降,公式近似于
=
0
n 0
0
n
LMS 算法的一个缺点是, 它对输入向量自相关矩阵 R 的条件数敏感。 当一个矩阵的条
件数比较大时,矩阵就称为病态矩阵,这种矩阵中的元素做微小改变,可能会引起相应线 性方程的解的很大变化。
·133·
第2篇
原理篇
5.4
线性神经网络与感知器的对比
5.3
LMS 算法中学习率的选择
如何在线性神经网络中,学习率参数 的选择非常重要,直接影响了神经网络的性能 和收敛性。本节介绍如何确保网络收敛的学习率及常见的学习率下降方式。
5.3.1 确保网络稳定收敛的学习率
如前所述, 越小,算法的运行时间就越长,算法也就记忆了更多过去的数据。因此, 的倒数反映了 LMS 算法的记忆容量大小。 往往需要根据经验选择,且与输入向量的统计特性有关。尽管我们小心翼翼地选择
(完整word版)自适应滤波LMS算法及RLS算法及其仿真

自适应滤波第1章绪论 (1)1.1自适应滤波理论发展过程 (1)1. 2自适应滤波发展前景 (2)1. 2. 1小波变换与自适应滤波 (2)1. 2. 2模糊神经网络与自适应滤波 (3)第2章线性自适应滤波理论 (4)2. 1最小均方自适应滤波器 (4)2. 1. 1最速下降算法 (4)2.1.2最小均方算法 (6)2. 2递归最小二乘自适应滤波器 (7)第3章仿真 (12)3.1基于LMS算法的MATLAB仿真 (12)3.2基于RLS算法的MATLAB仿真 (15)组别: 第二小组组员: 黄亚明李存龙杨振第1章绪论从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过程称为滤波。
相应的装置称为滤波器。
实际上, 一个滤波器可以看成是一个系统, 这个系统的目的是为了从含有噪声的数据中提取人们感兴趣的、或者希望得到的有用信号, 即期望信号。
滤波器可分为线性滤波器和非线性滤波器两种。
当滤波器的输出为输入的线性函数时, 该滤波器称为线性滤波器, 当滤波器的输出为输入的非线性函数时, 该滤波器就称为非线性滤波器。
自适应滤波器是在不知道输入过程的统计特性时, 或是输入过程的统计特性发生变化时, 能够自动调整自己的参数, 以满足某种最佳准则要求的滤波器。
1. 1自适应滤波理论发展过程自适应技术与最优化理论有着密切的系。
自适应算法中的最速下降算法以及最小二乘算法最初都是用来解决有/无约束条件的极值优化问题的。
1942年维纳(Wiener)研究了基于最小均方误差(MMSE)准则的在可加性噪声中信号的最佳滤波问题。
并利用Wiener. Hopf方程给出了对连续信号情况的最佳解。
基于这~准则的最佳滤波器称为维纳滤波器。
20世纪60年代初, 卡尔曼(Kalman)突破和发展了经典滤波理论, 在时间域上提出了状态空间方法, 提出了一套便于在计算机上实现的递推滤波算法, 并且适用于非平稳过程的滤波和多变量系统的滤波, 克服了维纳(Wiener)滤波理论的局限性, 并获得了广泛的应用。
LMS算法及改进

浅析LMS算法的改进及其应用摘要:本文简单介绍了LMS算法,以及为了解决基本LMS算法中收敛速度和稳态误差之间的矛盾,提出了一种改进的变步长LMS 算法,并将其应用于噪声抵消和谐波检测中去。
关键字:LMS算法;变步长;噪声抵消;谐波检测引言自适应滤波处理技术可以用来检测平稳和非平稳的随机信号,具有很强的自学习和自跟踪能力,算法简单易于实现,在噪声干扰抵消、线性预测编码、通信系统中的自适应均衡、未知系统的自适应参数辨识等方面获得了广泛的应用。
自适应滤波则是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
所谓“最优”是以一定的准则来衡量的,根据自适应滤波算法优化准则不同,自适应滤波算法可以分为最小均方误差(LMS)算法和递推最小二乘(RLS)算法两类最基本的算法。
基于最小均方误差准则,LMS算法使滤波器的输出信号与期望输出信号之间的均方误差最小,因此,本文在基本LMS算法基础上,提出一种新的变步长自适应滤波算法,将其应用于噪声抵消和谐波检测中去。
一.LMS算法LMS算法即最小均方误差(least-mean-squares) 算法,是线性自适应滤波算法,包括滤波过程和自适应过程。
基于最速下降法的LMS算法的迭代公式如下:e ( n) = d ( n)- w ( n - 1) x ( n) (1)w ( n) =w ( n - 1) + 2μ( n) e ( n) x ( n) (2)式中,x ( n)为自适应滤波器的输入;d ( n)为参考信号;e ( n)为误差;w ( n)为权重系数;μ( n)为步长。
LMS算法收敛的条件为:0 <μ< 1/λmax ,λmax是输入信号自相关矩阵的最大特征值。
二.LMS算法的改进由于LMS算法具有结构简单,计算复杂度小,性能稳定等特点,因而被广泛地应用于自适应均衡、语音处理、自适应噪音消除、雷达、系统辨识及信号处理等领域。
第05讲 自适应线性元件
第五章自适应线性元件自适应线性元件(Adaptive Linear Element,简称Adaline)也是早期神经网络模型之一,它是由威德罗(Widrow)和霍夫(Hoff)首先提出的。
它与感知器的主要不同之处在于其神经元有一个线性激活函数,这允许输出可以是任意值,而不仅仅只是像感知器中那样只能取0或1。
另外,它采用的是W—H学习法则,也称最小均方差(LMS)规则对权值进行训练,从而能够得到比感知器更快的收敛速度和更高的精度。
自适应线性元件的主要用途是线性逼近一个函数式而进行模式联想。
另外,它还适用于信号处理滤波、预测、模型识别和控制。
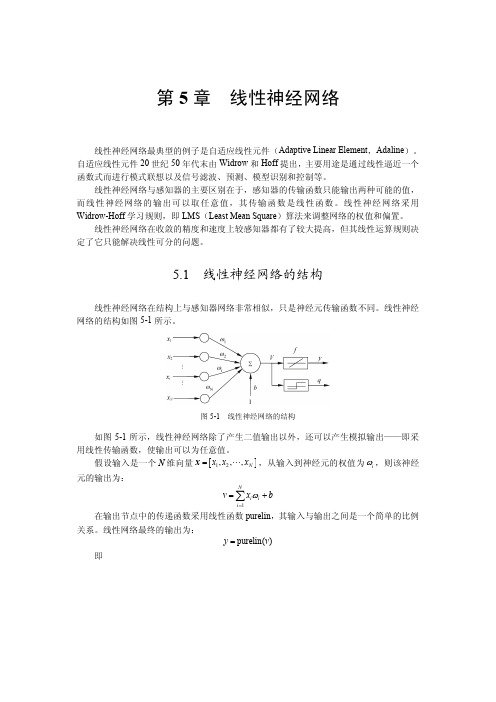
5.1 自适应线性神经元模型和结构一个线性的具有r个输人的自适应线性神经元模型如下图所示。
这个神经元有一个线性激活函数,被称为Adaline如图5.1(a)所示。
和感知器一样,偏差可以用来作为网络的一个可调参数,提供额外可调的自由变量以获得期望的网络特性。
线性神经元可以训练学习一个与之对应的输入输出的函数关系,或线性逼近任意一个非线性函数,但它不能产生任何非线性的计算特性。
图5. 1 自适应线性神经网络的结构当自适应线性网络由s个神经元相并联形成一层网络,此自适应线性神经网络又称为Madallne如图5.1(b)所示。
W—H规则仅能够训练单层网络,但这并不是什么严重问题。
如前面所述,单层线性网络与多层线性网络具有同样的能力,即对于每一个多层线性网络,都具有一个等效的单层线性网络与之对应。
在反向传播法产生以后,威德罗又将其自适应线性网络扩展成多层,甚至将激活函数也扩展成非线性的了。
5.2 W-H学习规则W—H学习规则是由威德罗和霍夫提出的用来修正权矢量的学习规则,所以用他们两人姓氏的第一个字母来命名。
采用W—H学习规则可以用来训练一定网络的权值和偏差使之线性地逼近一个函数式而进行模式联想(Pattern Association)。
定义一个线性网络的输出误差函数为:(5. 1)由(5.1)式可以看出:线性网络具有抛物线型误差函数所形成的误差表面,所以只有一个误差最小值。
神经网络的自适应学习算法研究

神经网络的自适应学习算法研究神经网络是一种模拟人类神经系统组织结构和功能的计算机技术,它已经应用于许多领域,如机器人、图像识别、语音识别等。
神经网络的特点是可以通过训练学习数据的特征,并从中提取出模式和规律。
其中一个关键的问题是如何通过学习数据自适应地调整神经网络的权值,以使神经网络能够更好地适应不同的应用场景。
自适应学习算法的基本思想是利用神经网络的反馈机制,通过反复迭代计算误差来改变神经元之间的连接权值,从而使神经网络能够逐步匹配输入数据和期望输出数据之间的关系。
传统的自适应学习算法包括最速下降法、逆Hessian矩阵法、L-BFGS方法等,但它们都有一些局限性,如存在局部极值、收敛速度慢等问题。
因此,近年来,研究人员提出了一些新的自适应学习算法。
一类比较有代表性的自适应学习算法是基于群智能的算法,如粒子群算法(PSO)和蚁群算法(ACO)。
它们都是在模拟生物的群体行为基础上,引入了随机搜索机制来寻找最优解。
PSO算法通过模拟粒子在搜索空间中的位置和速度来确定最优解,而ACO算法则是通过模拟蚂蚁在搜索和寻找食物的过程中释放信息素的行为来确定最优解。
这些算法的优势在于可以自适应地寻找全局最优解,并且不容易陷入局部极值。
另一类自适应学习算法是基于梯度下降优化的算法,如Adam算法和RMSprop 算法。
它们通过基于梯度向量的一阶或二阶矩估计来自适应地调整学习率,在保持收敛速度的同时避免陷入局部极值。
Adam算法具有较快的收敛速度和较强的鲁棒性,它通过动量项和自适应学习率来调整权值的更新步长;而RMSprop算法则通过平均梯度的平方根来调整学习率,有效地降低梯度噪声对权值的影响。
除了这些基于群智能和梯度下降的算法之外,还有一些其他的自适应学习算法,比如基于神经元性质的算法和基于统计估计的算法。
基于神经元性质的算法涉及到神经元突触可塑性、斯皮克和重构等概念,它们利用神经元的特殊性质来调整神经网络,例如,增强学习算法就是基于斯皮克的算法,它通过对神经元的阈值进行调整来优化神经网络的输出。
LMS算法原理及推导
LMS算法原理及推导LMS(Least Mean Square)算法是一种自适应滤波算法,广泛应用于信号处理、通信系统、自适应控制等领域。
LMS算法的核心思想是通过调整滤波器的权值,使得滤波器输出的误差信号的平方和达到最小,从而实现滤波器的自适应调整。
1.假设我们有一个滤波器,滤波器的输入为输入信号x(n),输出为滤波器的输出信号y(n)。
我们将期望的输出信号为d(n),滤波器的输出信号为y(n)。
定义误差信号e(n)为期望输出信号与滤波器输出信号之差,即e(n)=d(n)-y(n)。
2. 定义滤波器的权值向量为w,w = [w1, w2, ..., wn]。
滤波器的输出信号y(n)可以表示为y(n) = w^T * x(n),其中^T表示向量的转置。
3.我们的目标是使得误差信号e(n)的平方和达到最小,即最小二乘误差函数J(w)=E[e^2(n)]最小。
其中E[.]表示期望运算。
4.使用梯度下降法来最小化误差函数J(w)。
梯度下降法的基本原理是沿着误差函数的梯度方向更新滤波器的权值,直到到达误差函数的局部最小值。
根据链式法则,误差函数关于权值向量的梯度可以表示为∂J(w)/∂w=∂J(w)/∂e(n)*∂e(n)/∂w。
5.首先计算∂J(w)/∂e(n),根据最小二乘误差函数的定义,可以得到∂J(w)/∂e(n)=2*e(n)。
6.然后计算∂e(n)/∂w,根据滤波器输出信号y(n)对权值向量w的偏导数的计算,可以得到∂e(n)/∂w=-x(n)。
7.将∂J(w)/∂e(n)和∂e(n)/∂w代入链式法则的公式中,可以得到∂J(w)/∂w=2*e(n)*(-x(n))。
8.更新权值向量w的公式为w(n+1)=w(n)-μ*∂J(w)/∂w,其中μ为步长因子(也称为学习率),控制着权值的调整幅度。
9.最终的LMS算法更新公式为w(n+1)=w(n)+2*μ*e(n)*x(n)。
以上推导过程是LMS算法基于梯度下降法的推导过程。
LMS类自适应算法

LMS类自适应算法LMS(最小均方算法)是一种自适应算法,用于根据输入数据的统计特性,自动调整系统参数以达到最佳性能。
LMS算法的主要目标是最小化均方误差(MSE),它在各种应用中都得到了广泛的应用,包括自适应滤波、信号处理和通信系统等。
LMS算法基于梯度下降的思想,通过反复调整系统参数,来不断逼近最小均方误差的目标。
LMS算法的关键是通过观察输入数据和系统输出之间的误差,来估计相应的梯度信息,并以此来调整系统参数。
具体而言,LMS算法根据如下的迭代公式进行更新:w(n+1)=w(n)+μ*e(n)*x(n)其中w(n)是参数矢量的估计值,μ是步长参数,e(n)是误差信号,x(n)是输入信号。
通过不断重复上述迭代过程,LMS算法能够逐步改善系统性能,并收敛到最优解。
LMS算法的自适应性体现在参数调整的过程中。
由于输入数据是实时提供的,所以LMS算法能够动态地跟随输入数据的变化,从而适应不同的统计特性。
步长参数μ的选取也是一个关键的问题,它决定了系统的收敛速度和稳定性。
一般而言,如果步长参数过大,系统可能无法收敛;如果步长参数过小,系统收敛速度较慢。
因此,需要选择适当的步长参数才能获得最佳的性能。
LMS算法在自适应滤波中有着广泛的应用。
自适应滤波主要用于信号去噪和系统辨识等问题。
在信号去噪中,LMS算法通过从输入信号中估计噪声的统计特性,来自动抑制噪声成分,从而提高信号质量。
在系统辨识中,LMS算法能够自动估计系统的冲激响应,从而实现对输入信号的准确重建。
除了自适应滤波,LMS算法还被广泛应用于信号处理和通信系统中。
在信号处理中,LMS算法可以用于自适应降噪、自适应模拟滤波和自适应均衡等问题。
在通信系统中,LMS算法可以用于自适应预编码和自适应均衡,以提高通信系统的传输性能。
总之,LMS类自适应算法是一种非常有效的自适应算法,通过不断调整系统参数,能够实现对输入数据的自动适应。
它在各种应用中都有广泛的应用,尤其在自适应滤波、信号处理和通信系统中具有重要的地位。
ADLINE LMS Matlab实验
《神经网络导论》实验一Adaline的LMS算法专业班级硕2081学号**********姓名李海玥完成时间2012年12月《神经网络导论》实验一Adaline的LMS算法李海玥2012年12月一、实验目的1.通过实验了解Adaline的工作原理;2.对比LMS三种算法,并通过上机实验掌握具体的实现方法;3.与采用硬限幅函数的单个神经元模型进行对比,比较其异同。
二、实验原理2.1.Adaline原理采用硬限幅函数的单个神经元,通过简单的学习算法,可以成功实现两类线性可分类的分类功能。
但对于大多数的非线性可分类来说,则无法完成分类功能,因此采用具有线性功能函数的神经元Adaline方法。
设输入矢量X=[x1,x2⋯x N],如果加权向量W=[w1,w2⋯w N],则神经元的输出为:{I=WX T=XW Ty=f(I)=WX T=XW T按照最小二乘法,就是要求所有样本的实际输出值d与理想预期值y之间的误差的均方值最小。
定义误差ε=d−y。
考虑所有可能出现的样本的均方误差:E[ε2]=E[(d−y)2]=E[d2]+WRW T−2PW T其中,R≡E[X T X]是输入向量相关矩阵,P=E[dX]是输入向量与期望输出的互相关向量,通过求梯度求得最优权向量:W∗=PR−12.2.LMS学习问题的严格递推学习算法1.任意设置初始加权矢量W(0);2.对于每一个时序变量k,按下式调整权向量W:W(k+1)=W(k)+2αE[ε(k)X(k)]2.3. LMS 学习问题的随机逼近算法将严格递推公式修正如下形式:W(k +1)=W(k)+2αε(k)X(k)1) α(k)是时序k 的非增函数;2) ∑α(k )=∞,∑α2<∞∞k=0∞k=0;2.4. LMS 学习基于统计的算法这是一种具有一定统计特性的学习算法,递推公式如下:W (k +1)=W (k )+2αP∑εP (k )X p (k )P如果P 的取值很大相当于严格递推法,若P=1,则相当于随机逼近法。
自适应滤波LMS算法及RLS算法及其仿真

自适应滤波LMS算法及RLS算法及其仿真1.引言2.自适应滤波LMS算法LMS(Least Mean Square)算法是一种最小均方误差准则的自适应滤波算法。
其基本原理是通过不断调整滤波器的权值,使得输出信号的均方误差最小化。
LMS算法的迭代公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)为滤波器的权值向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。
通过迭代更新权值,LMS算法逐渐收敛,实现了自适应滤波。
3.RLS算法RLS(Recursive Least Square)算法是一种递归最小二乘法的自适应滤波算法。
相比于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法基于最小二乘准则,通过递归式地计算滤波器权值矩阵,不断优化滤波器的性能。
迭代公式可以表示为:P(n)=(P(n-1)-P(n-1)*x(n)*x(n)'*P(n-1)/(λ+x(n)'*P(n-1)*x(n))) K(n)=P(n)*x(n)/(λ+x(n)'*P(n)*x(n))w(n+1)=w(n)+K(n)*e(n)其中,P(n)为滤波器的协方差矩阵,K(n)为最优权值,λ为遗忘因子(用于控制算法的收敛速度),e(n)为误差信号。
4.仿真实验为了验证LMS算法和RLS算法的性能,我们进行了一组仿真实验。
假设输入信号为一个正弦信号,噪声为高斯白噪声。
我们分别使用LMS和RLS算法对输入信号进行自适应滤波,比较其输出信号和原始信号的均方误差。
在仿真中,我们设置了相同的滤波器长度和步长因子,比较LMS和RLS算法的收敛速度和输出质量。
实验结果表明,相对于LMS算法,RLS 算法在相同条件下具有更快的收敛速度和更低的均方误差。
这验证了RLS 算法在自适应滤波中的优越性。
5.结论本文介绍了自适应滤波LMS算法和RLS算法的原理及其在仿真中的应用。
实验结果表明,相对于LMS算法,RLS算法具有更好的收敛性能和适应性。
LMS自适应线性预测算法

LMS自适应线性预测算法LMS(最小均方)自适应线性预测算法是一种常用的信号处理算法,用于估计未知信号的值。
它基于线性模型,通过逐步地调整权重以最小化预测误差的均方差来实现预测。
在该算法中,自适应性体现在权重的自适应更新上,使得算法能够适应不断变化的信号环境。
LMS算法的基本思想是,通过输入信号的相关性来构造一个线性模型,并使用已知的输入信号和相应的输出信号来估计模型的权重。
这样,当没有给定输出信号时,我们可以使用该模型来预测未知信号的值。
预测误差被定义为实际输出信号与预测输出信号之间的差异。
LMS算法的核心是权重的自适应更新。
为了通过最小化均方误差来优化权重,算法使用了梯度下降的思想。
具体来说,算法使用误差信号(预测输出与实际输出的差异)来调整每个权重的值,使得误差信号的均方差尽可能小。
LMS算法的更新规则如下:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)是上一次权重的值,w(n+1)是当前权重的值,μ是步长参数(控制权重更新的速度),e(n)是误差信号,x(n)是输入信号。
LMS算法的步骤如下:1.初始化权重w(0)为一个适应信号长度的零向量。
2.对于每一个时间步n,计算输出y(n):y(n)=w^T(n)x(n),其中x(n)是输入信号,w^T(n)是权重向量的转置。
3.计算误差信号e(n):e(n)=d(n)-y(n),其中d(n)是实际输出信号。
4.更新权重w(n+1):w(n+1)=w(n)+μ*e(n)*x(n)。
5.重复步骤2-4,直到达到预定的停止条件(如达到最大迭代次数、误差信号小于一些阈值等)。
LMS算法的性能取决于步长参数μ的选择。
如果步长参数过小,算法收敛速度较慢;如果步长参数过大,算法可能发散。
因此,在实际应用中,需要仔细选择适当的步长参数。
LMS算法的优点是简单、易于实现,对于大多数实时信号处理应用而言,具有较高的计算效率。
此外,LMS算法对于非线性系统也能够进行利用,但是需要注意对非线性情况下的模型做一定的适应。
第7章 ADALINE神经网络

• ADALINE结构如图7-1所示,它具有与感知器相同的基 本结构,仅在传递函数上有所不同。
4
《神经网络理论及应用》
• 神经元的输出表达式为
• 下面以两输入的ADALINE为例,对区域的边界进行讨 论。区域之间的判定边界由使得净输入n为零的输入向 量来确定,即
• 式(7-2)在二维平面坐标系中确定了一条直线,如图72所示。ADALINE同样可以将线性可分的对象分为两类。
误差,且算法中不包含导数项,因此该算法较简单,并
且具有收》
• ADALINE神经网络反映了输入和输出样本向量空间中 的线性映射关系,它运用LMS算法,网络的均方误差呈 现出的是二次函数的抛物曲面,曲面的顶点则为神经网 络的最优解。虽然在网络的学习速率足够小的情况下, 网络总能够找到最优解,但是其误差可能达不到0,只 能输出误差最小的解,这也是ADALINE网络的局限性 之一。
• 式中, 为学习速率,且满足
,其中 为相关
矩阵的最大特征值。若将式(7-19)展开成权值更新和
偏置值更新两个部分,则可得到
• 当LMS单神经元算法扩展到多神经元的单层ADALINE
神经网络时,则权值向量扩展为权值矩阵W,偏置值b 扩展为偏置向量b,误差值e扩展为误差向量e,即
• LMS学习算法中,权值变化量正比于网络的输入和输出
• ADALINE神经网络的传递函数为线性函数,因此单层 的ADALINE神经网络只能够实现对样本的线性分割, 或是对样本的线性逼近。虽然多层ADALINE神经网络 可以弥补这一点,但多层ADALINE神经网络收敛速度 较慢,准确率较低,尤其是在输入样本个数较多时,网 络训练往往需要长时间等待且很难收敛。
• 因此,在进行每一步迭代时,梯度的估计值为
自适应波束成形算法LMSRLSVSSLMS分解

自适应波束成形算法LMSRLSVSSLMS分解自适应波束成形(Adaptive Beamforming)是一种用于抑制多径干扰和提高系统性能的技术。
它通过调整阵列天线的相位和振幅权重,来实现对特定方向的信号增强和对其他方向的信号抑制。
自适应波束成形算法主要有LMS(Least Mean Squares)算法、RLS(Recursive Least Squares)算法和VSSLMS(Very Short Sleep LMS)算法。
LMS算法是最简单、最经典的自适应波束成形算法之一、它基于最小均方误差准则,通过调整权重向量使输出信号与期望信号的差异最小化。
具体来说,LMS算法使用随机梯度下降法来更新权重向量。
在每个时刻,根据当前输出信号与期望信号的差异,计算出梯度,并将其乘以一个适当的步长因子,然后更新权重向量。
LMS算法的实时性较好,抗干扰性能也较好,但由于其收敛速度较慢,所以在实际应用中,通常需要通过增加步长因子、引入正则化等方法来加快收敛速度。
RLS算法是一种递归算法,相对于LMS算法具有更快的收敛速度和更好的抗干扰性能。
它的基本思想是在每个时刻,根据前一时刻的权重向量和观测信号,计算出误差和增益向量,然后利用这些信息来更新权重向量。
RLS算法通过使用逆矩阵来计算增益向量,从而可以一次性更新所有权重。
由于RLS算法涉及矩阵的计算,所以相对于LMS算法而言,其计算复杂度较高。
在实际应用中,通常需要选取合适的截断参数来平衡性能和复杂度。
VSSLMS算法是一种针对快速时变信道的自适应波束成形算法。
它通过使用非持续脉冲激励信号以及无需对脉冲响应进行估计的方法,实现了对快速时变信道的自适应性能优化。
VSSLMS算法主要包括两个步骤:预处理和权重更新。
预处理步骤中,采用非持续脉冲激励信号作为输入信号,通过观测信号与输入信号的卷积来得到对应的累加响应。
在权重更新步骤中,根据当前观测信号与累加响应的差异,计算出增益向量,并利用增益向量来更新权重向量。
LMS类自适应算法ppt课件

用前向预测器对瞬时估计误差 滤波,则得到滤波型LMS算法。
16
解相关LMS算法
滤波型LMS算法: 步骤一:初始化 w(0)=0; 步骤二:更新:
e(n) d (n) wH (n 1)u(n)
e(n) [e(n), e(n 1),…,e(n-M+1)]T
2、学习速率参数选择时变
(n) c
n
这样也存在问题。在参数c比较大时,LMS算法可能 在经过若干次迭代后即变为发散。
3、固定+时变
两个经典例子(n): 0
(1)
1 (n / )
(2)
(n) 0, n N0
(n)
eNd 0
, (nN0 )
n
N0
21
学习速率参数选择
u(n)u
H
(n)w(n)]
进时而 梯,度将算真 法是 :梯度w(wn向()n量w1)(n用1(瞬)n)e时*((nn)梯)uu((nn度))[d(向n) 量uT代(n)w替*(,n 1既)]*得瞬
e(n) d (n) uT (n)w*(n 1) d (n) wH (n 1)u(n)
e(n) d (n) wH (n 1)u(n)
a(n)
uH (n 1)u(n) uH (n 1)u(n 1)
v(n) u(n) a(n)u(n 1)
w(n) w(n 1) u(n)v(n)
(n)
e(n)
uH (n)v(n)
上述算法中,参数 称为修正因子
14
J (n) J (n)
LMS算法

LMS算法LMS(最小均方算法)是一种常用的自适应滤波算法,被广泛应用于数字信号处理领域。
该算法通过不断调整自适应滤波器的系数,使滤波器的输出信号与期望信号之间的均方误差最小化。
在实际应用中,LMS算法具有简单且易于实现的特点,因此备受青睐。
LMS算法原理LMS算法的基本原理是基于梯度下降法,通过不断调整滤波器的权值来最小化误差信号的均方误差。
在每次迭代中,根据当前权值和误差信号,更新滤波器的权值,使误差信号的均方误差逐渐减小。
这一过程可以简化为以下几个步骤:1.初始化滤波器的权值;2.输入信号通过滤波器得到输出信号;3.计算输出信号与期望信号之间的误差;4.根据误差信号和输入信号,调整滤波器的权值;5.重复前面的步骤,直到误差信号满足收敛条件。
LMS算法优缺点LMS算法作为一种经典的自适应滤波算法,具有以下优点和缺点:优点•简单易实现,算法理解和编程难度较低;•对于线性系统具有较好的收敛性和稳定性;•在处理实时信号时具有较低的计算复杂度。
缺点•对非平稳信号和噪声较大信号的适应性较差;•在滤波器阶数较高时,收敛速度较慢;•对滤波器系数的选择较为敏感,需要经验或调试来确保算法性能。
LMS算法应用场景LMS算法在数字信号处理和通信系统中有着广泛的应用,常见的应用场景包括:•自适应滤波:通过调整滤波器的权值,实现对信号的去噪和增强;•通道均衡:对通信信道进行自适应均衡,提高信道传输性能;•自适应降噪:通过LMS算法实现对信号中噪声的抑制,提高信号质量;•信号预测:利用前一时刻的信号值预测未来信号的值,用于时间序列分析等领域。
结语LMS算法作为一种常用的自适应滤波算法,在数字信号处理和通信系统中发挥着重要作用。
通过不断调整滤波器的权值,LMS算法能够实现对信号的处理和改善,在实际应用中具有广泛的应用前景。
lms算法基本思想及原理

lms算法基本思想及原理LMS(Least Mean Squares)算法是一种基于最小均方误差准则的自适应滤波算法,用于解决线性系统的自适应系统辨识和自适应滤波问题。
其基本思想是通过不断调整滤波器的系数,使得滤波器输出与期望输出之间的均方误差最小。
LMS算法的核心思想是梯度下降法,它通过使用误差信号的负梯度方向来更新滤波器的系数。
具体而言,LMS算法根据当前输入信号和滤波器的系数计算出滤波器的输出值,然后将输出值与期望输出进行比较得到误差信号。
根据误差信号的梯度方向,调整滤波器的系数以减小误差。
这种调整方式保证了误差在每次迭代中都能减小,最终收敛到最优解。
LMS算法的具体实现过程可以分为以下几步:1.初始化滤波器系数。
通常可以将滤波器系数初始化为零或者随机值。
2.从输入信号中获取一个样本,并将其输入到滤波器中,得到滤波器的输出值。
3.将滤波器的输出值与期望输出进行比较,得到误差信号。
4.根据误差信号的梯度方向,调整滤波器的系数,使得误差尽可能减小。
5.重复步骤2至4,直至达到收敛条件。
在每次迭代中,LMS算法的滤波器系数的更新公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)表示第n次迭代的滤波器系数,μ为步长参数,e(n)为第n次迭代的误差信号,x(n)为对应的输入信号。
LMS算法的优点是简单、易于实现,并且具有较快的收敛速度。
它可以适用于较大规模的自适应滤波问题,且对于非平稳信号也有较好的适应性。
另外,LMS算法还具有一定的鲁棒性,对输入信号中的噪声和干扰有一定的抑制能力。
然而,LMS算法也存在一些缺点。
首先,LMS算法对信号的统计特性要求较高,如果信号的统计特性与算法假设的不一致,可能会导致算法性能下降。
其次,LMS算法对步长参数的选择较为敏感,步长过大容易导致不稳定性,步长过小可能导致收敛速度慢。
此外,LMS算法可能会陷入局部最优解,从而影响算法的性能。
总结起来,LMS算法是一种基于最小均方误差准则的自适应滤波算法,其通过梯度下降法调整滤波器的系数,使得滤波器的输出尽可能接近期望输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5
最陡下降算法 4
在步幅系数选择为 0.02 ,最小误差为 Emin 0.001 0.2633 的条件下,在 MATLAB
下编程计算,得到某一次的相应结果如下。 权值向量 W [0.3516 均方误差曲线
0.9
0.3240];
0.8
0.7
均方误差 E
0.6
0.5
0.4
0.3
0.2
2.0106 1.1515 R ; 1.1515 1.7398
P 1.1058 1.0074 ; W* 0.3517 0.3463;
E ( 2 )min 0.2623
2) 阈值待定的情况下 根据样本数据得到的运算结果如下。
2
2.0106 1.1515 0.0269 R 1.1515 1.7398 0.0422 ; 0.0269 0.0422 1.0000
5
10
15
20 迭代次数 N
25
30
35
40
图 2
随机逼近算法均方误差曲线
可以看到,经过 38 次的迭代算法,最后均方误差收敛到的计算阈值 0.2633。
4
不同的步幅系数对迭代步数的影响
表 1 给出了在不同的步幅系数的条件下测试随机逼近算法达到收敛时的迭代次数。
3
表 1
不同步幅系数下随机逼近法的迭代次数
y f ( I ) I WXT
得到的,线性函数的相比于硬限幅函数,在这里其最大的特点就是线性函数是可微的。LMS 算法基于上式右侧递推得到,三种递推算法的核心递推环节通过求导得到,因此,失去线性 函数的条件,而换成硬限幅函数作为传递函数,以上算法均无法进行。
6
若采用硬限幅函数,那么我们只能运用硬限幅函数的权值递推式来求权值 6
其中 R
E[XT X] 是输入向量的自相关矩阵, P
E (dX) 是输入向量和期望输出的互相关
向量,通过求梯度得到的最优权值为:
W* PR 1
这种算法需要大量的运算,比较难以实现。于是有了以下递推算法。
2
1) 2)
LMS 学习问题的严格递推学习算法
任意设置初始加权矢量 W(0) ; 对每一个时序变量 k ,按照下式调整权值向量:
7
参考源代码
1
样本绘图代码
%% 画图 clear;clc;clf; load('C:\Users\TX\Desktop\lms_tstsamp.mat'); for i = 1:length(tstsamp) if tstsamp(i,3) == 1 plot(tstsamp(i,1), tstsamp(i,2), 'b*');hold on; elseif tstsamp(i,3) ==-1 plot(tstsamp(i,1), tstsamp(i,2), 'ro');hold on; end end for theta = 0:0.02:(2*pi-0.02) xx1 = -1 + 1.7*cos(theta); xx2 = xx1 + 2; yy1 = -1 + 1.7*sin(theta); yy2 = yy1 + 2; plot(xx1, yy1, ':r');hold on; plot(xx2, yy2, ':b');hold on; end f = @(x)(-x); fplot(f,[-3 3],'k');hold on; axis([-3 3 -3 3]); axis equal;grid on;
P 1.1058 1.0074 0 ; W* 0.3516 0.3469 ,
0.0241;
E ( 2 )min 0.2617
根据给出的样本分布可以知道, 认为阈值为零是合理的, 从忽略阈值和计算阈值两种情 况的得到的结果来相比较可以知道,认为阈值为零确实是合理的。 3
500
迭代次数 N
图 7 图 5~8
=0.1
图 8
=0.35(不收敛)
不同步幅系数下 Widrow 严格递推算法的均方误差曲线
这些结果和步骤 4 得到的结果类似,当步幅系数增大的时候,迭代步数加快,但是步幅 系数过大的时候,会导致结果发散。
四 思考
1 实验中将线性函数换做硬限幅函数,会导致什么现象? 前面所叙述和应用的 LMS 矩阵算法以及三种递推算法,都是基于传递函数是现行函数
W(k 1) W(k ) 2 E[ (k ) X(k )]
其中右侧第二项为误差均方梯度, 为步幅系数。 这种方法克服了矩阵求逆的困难,但是仍需大量的统计运算。
3
LMS 的随机逼近算法
将严格递推算法的递推公式修正为如下形式:
W(k 1) W(k ) 2 (k )X(k )
表 3 检验结果
算法 LMS 算法 随机逼近算法 最陡下降算法
3
权值 W [0.3517 [0.3365 [0.3516 0.3463] 0.3365] 0.3240]
判错次数 10 10 10
正确率 95% 95% 95%
各种算法结果如图 4 所示。
随机逼近算法 2
最陡下降算法 1
0
-1 LMS算 法 -2
迭代次数 N
0.5 0.45 0.4 0.35 0.3
20
25
30
0.25
2
4
6
迭代次数 N
8
10
图 5
0.38 0.36 0.34
均方误差 E
=0.02
5 x 10
50
图 6
=0.05
4
0.32 0.3 0.28 0.26 1
均方误差 E
3
2
1
2
3
迭代次数 N
4
5
0 0
100
200
300
400
随机逼近算法 3
在步幅系数选择为 0.01 ,最小误差为 Emin 0.001 0.2633 的条件下,在 MATLAB
下编程计算,得到某一次的相应结果如下。 权值向量
W [0.3365 0.3365];
均方误差曲线
1
0.9
0.8
0.7
均方误差 E
0.6
0.5
0.4
0.3
0.2
0
测试 序号 步幅 系数 0.002 0.008 0.020 0.100 0.300①
1 299 63 18 5 17
2 237 55 17 20 282
3 259 65 27 24 107
4 240 47 20 2 34
5 265 92 16 19 6
平均迭代次数 260.00 64.40 19.60 14.00 89.20
0
5
10
15 迭代次数 N
20
25
30
图 3
①
最陡下降法的均方误差曲线
步幅系数为 0.3 时的结果中忽略了结果中不收敛时的迭代次数。
4
可以看到,经过 29 次的迭代算法,最后均方误差收敛到的计算阈值 0.2632。
6
不同样本数目对迭代次数的影响
表 2 给出了在不同的样本数目下的最陡下降算法达到收敛时的迭代次数。 表 2 不同样本数目下的最陡下降法迭代次数 测试 序号 步幅 系数 1 2 5 50 150 1 23 24 27 24 27 2 20 29 29 26 26 3 26 43 32 27 26 4 29 40 26 23 27 5 28 21 25 29 26 迭代次数 均值 /方差 25.20/13.70 31.40/94.30 27.80/7.70 25.80/5.70 26.40/0.30
的 算法
——神经网络导论实验一
二〇一〇年十月十六日
一 实验目的
1 2 3 通过实验了解 Adaline 的工作原理; 对比 LMS 的三种算法,并通过上机实验掌握具体实现方法; 与采用硬限幅函数的单个神经元模型进行对比,比较其异同。
二 实验原理 1 基本原理
我们已经知道, 采用硬限幅函数的单个神经元, 通过简单的学习算法可以完成线性可分 类的分类功能。但对于大多数的非线性可分类问题,则无法完成分类。为此我们转向采用具 有线性功能函数的神经元 Adaline 方法。 设输入矢量 X [ x1 , x2
W(k 1) W(k ) d (k ) y(k ) X(k )
通过上式进行递推即可以得到权值,其中为步幅系数,传递函数为
1, I 0 y hardlims( I ) 1, I 0
得到权值为
W [0.0509 0.0542]
由此得到一组权值和典型的均方误差曲线如下图。
从表 1 可以看到,一般来说,步幅系数选择的越大,需要的迭代次数越少,这是因为, 在初始权值即初始分界线斜率确定的情况下,步幅系数越大,在每次迭代运算中,接近最佳 分界线的速度越快,这样,就会越快的收敛到最佳分界线即最佳权值附近。 但是,当步幅系数超过一定的值以后,就可能需要更多的迭代次数,甚至可能出现不收 敛的情况, 原因也很简单, 步幅系数给的太大, 分界线斜率一次改变过多, 就容易导致其 “转 过头了” ,反而需要更多的次数接近最佳权值。如果不幸的是这样过大的偏转可能导致其越 来越远的偏离最佳斜率,这样就导致了不收敛的情况。
三 实验内容 1 样本矢量 1
根据给出的样本值(lms_samp.mat)的数据,得到样本如图 1 表示。其中红色和蓝色的 点分别是输入的两类样本,黑色的线是其理想分界线。
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1