机器人相关的期刊
science robotics 稿件要求

标题:科学的机器人:突破人类创新极限的未来之路一、科学的机器人简介科学的机器人(Science Robotics)是一本权威的科学期刊,旨在促进机器人领域的学术交流和创新发展。
自2016年创刊以来,该期刊涵盖了机器人技术、人工智能、自动化系统等领域的前沿研究成果,为学术界和工业界的科研人员提供了一扇深入探索科学与技术交汇处的窗口。
二、科学的机器人的深度和广度科学的机器人期刊所涉及的领域非常广泛,包括但不限于生物灵感的智能机器人、医疗机器人、工业机器人、自主导航系统、人机协作、智能传感器等多个方面。
这些领域的研究内容涵盖了机器人的设计、控制、感知、规划、执行等多个方面,对于推动科技创新和改善人类生活具有极其重要的意义。
在生物灵感的智能机器人方面,基于动物行为原理和生物学启发,研究人员模拟了昆虫、鱼类等动物的行为和结构,开发出了一系列具有高度智能的机器人,比如模仿昆虫飞行的微型飞行器、模拟鸟类飞翔的无人机等。
这些研究对于机器人领域的技术进步和科学探索提供了新的思路和方法。
医疗机器人领域的研究则广泛涉及外科手术机器人、康复机器人、辅助生活机器人等多个方向。
通过结合机器人技术和医学知识,研究人员致力于研发更加精准、安全和高效的医疗机器人,以改善医疗卫生领域的治疗水平和服务质量,让患者能够更好地享受到先进技术的帮助。
工业机器人在制造业、能源、交通、农业等各个领域有着广泛的应用,为企业生产效率提升、人工成本降低、生产安全保障等方面做出了巨大贡献。
自主导航系统和智能传感器的应用也为机器人的自主运行、精准感知提供了强大支持。
三、科学的机器人对未来的重要意义科学的机器人的发展不仅意味着机器人技术本身的进步,更蕴含着对整个社会的深远影响。
在未来,医疗机器人将更好地协助医护人员进行手术、康复治疗和护理工作;工业机器人将扮演更重要的角色,为人类工业生产和生活提供更加高效、安全的服务;自主导航系统和智能传感器将助力机器人在各个领域更加准确地执行任务和适应环境变化。
人工智能领域的学术期刊与研究机构介绍

人工智能领域的学术期刊与研究机构介绍人工智能(Artificial Intelligence,简称AI)是近年来备受关注的一个热门领域,其对社会和经济发展产生了巨大的影响。
在人工智能领域进行学术研究的科学家和学者需要找到最新的研究成果和与同行交流的机会。
本文将介绍一些重要的学术期刊和研究机构,在这些平台上,人工智能研究者可以分享经验和思想,推动人工智能技术的发展。
一、学术期刊1.《人工智能》(Artificial Intelligence)《人工智能》是人工智能领域的顶级学术期刊,由国际人工智能学会(Association for the Advancement of Artificial Intelligence,AAAI)出版。
该期刊涵盖了人工智能领域的各个方面,包括机器学习、自然语言处理、计算机视觉等。
它是人工智能研究者发表原创研究成果的首选期刊之一。
2.《机器学习》(Machine Learning)《机器学习》期刊是机器学习领域的重要学术期刊,致力于发表关于机器学习理论、方法和应用的研究成果。
该期刊对机器学习领域的新兴技术和热点问题进行深入研究,对于推动机器学习领域的发展具有重要意义。
3.《人工智能研究进展》(AI Research)《人工智能研究进展》是中国人工智能学会主办的学术期刊,旨在推动国内外人工智能研究的交流与发展。
该期刊为人工智能领域的研究者提供了一个分享最新研究成果的平台,介绍了人工智能领域的前沿技术和应用。
二、研究机构1.麻省理工学院人工智能实验室(MIT Artificial Intelligence Laboratory)麻省理工学院人工智能实验室是全球最知名的人工智能研究机构之一。
成立于1959年,该实验室致力于开展人工智能的基础研究和应用研究,培养了众多优秀的人工智能科学家和工程师。
实验室的研究成果在学术界和工业界都具有重要影响力。
2.斯坦福人工智能实验室(Stanford Artificial Intelligence Laboratory)斯坦福人工智能实验室是斯坦福大学的一所研究机构,创建于1962年。
机器人顶刊论文
机器人顶刊论文机器人领域内除开science robotics以外,TRO和IJRR是机器人领域的两大顶刊,最近师弟在选择研究方向,因此对两大顶刊的论文做了整理。
TRO的全称IEEE Transactions on Robotics,是IEEE旗下机器人与自动化协会的汇刊,最新的影响因子为6.123。
ISSUE 61 An End-to-End Approach to Self-Folding Origami Structures2 Continuous-Time Visual-Inertial Odometry for Event Cameras3 Multicontact Locomotion of Legged Robots4 On the Combined Inverse-Dynamics/Passivity-Based Control of Elastic-Joint Robots5 Control of Magnetic Microrobot Teams for Temporal Micromanipulation Tasks6 Supervisory Control of Multirotor Vehicles in Challenging Conditions Using Inertial Measurements7 Robust Ballistic Catching: A Hybrid System Stabilization Problem8 Discrete Cosserat Approach for Multisection Soft Manipulator Dynamics9 Anonymous Hedonic Game for Task Allocation in a Large-Scale Multiple Agent System10 Multimodal Sensorimotor Integration for Expert-in-the-Loop Telerobotic Surgical Training11 Fast, Generic, and Reliable Control and Simulation of Soft Robots Using Model Order Reduction12 A Path/Surface Following Control Approach to Generate Virtual Fixtures13 Modeling and Implementation of the McKibben Actuator in Hydraulic Systems14 Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving15 Robust Planar Odometry Based on Symmetric Range Flow and Multiscan Alignment16 Accelerated Sensorimotor Learning of Compliant Movement Primitives17 Clock-Torqued Rolling SLIP Model and Its Application to Variable-Speed Running in aHexapod Robot18 On the Covariance of X in AX=XB19 Safe Testing of Electrical Diathermy Cutting Using a New Generation Soft ManipulatorISSUE 51 Toward Dexterous Manipulation With Augmented Adaptive Synergies: The Pisa/IIT SoftHand 22 Efficient Equilibrium Testing Under Adhesion and Anisotropy Using Empirical Contact Force Models3 Force, Impedance, and Trajectory Learning for Contact Tooling and Haptic Identification4 An Ankle–Foot Prosthesis Emulator With Control of Plantarflexion and Inversion–Eversion Torque5 SLAP: Simultaneous Localization and Planning Under Uncertainty via Dynamic Replanning in Belief Space6 An Analytical Loading Model for n -Tendon Continuum Robots7 A Direct Dense Visual Servoing Approach Using Photometric Moments8 Computational Design of Robotic Devices From High-Level Motion Specifications9 Multicontact Postures Computation on Manifolds10 Stiffness Modulation in an Elastic Articulated-Cable Leg-Orthosis Emulator: Theory and Experiment11 Human–Robot Communications of Probabilistic Beliefs via a Dirichlet Process Mixture of Statements12 Multirobot Reconnection on Graphs: Problem, Complexity, and Algorithms13 Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras14 Reactive Trajectory Generation for Multiple Vehicles in Unknown Environments With Wind Disturbances15 Resource-Aware Large-Scale Cooperative Three-Dimensional Mapping Using Multiple Mobile Devices16 Control of Planar Spring–Mass Running Through Virtual Tuning of Radial Leg Damping17 Gait Design for a Snake Robot by Connecting Curve Segments and ExperimentalDemonstration18 Server-Assisted Distributed Cooperative Localization Over Unreliable Communication Links19 Realization of Smooth Pursuit for a Quantized Compliant Camera Positioning SystemISSUE 41 A Survey on Aerial Swarm Robotics2 Trajectory Planning for Quadrotor Swarms3 A Distributed Control Approach to Formation Balancing and Maneuvering of Multiple Multirotor UAVs4 Joint Coverage, Connectivity, and Charging Strategies for Distributed UAV Networks5 Robotic Herding of a Flock of Birds Using an Unmanned Aerial Vehicle6 Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures7 Decentralized Trajectory Tracking Control for Soft Robots Interacting With the Environment8 Resilient, Provably-Correct, and High-Level Robot Behaviors9 Humanoid Dynamic Synchronization Through Whole-Body Bilateral Feedback Teleoperation10 Informed Sampling for Asymptotically Optimal Path Planning11 Robust Tactile Descriptors for Discriminating Objects From Textural Properties via Artificial Robotic Skin12 VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator13 Zero Step Capturability for Legged Robots in Multicontact14 Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance15 Physically Plausible Wrench Decomposition for Multieffector Object Manipulation16 Considering Uncertainty in Optimal Robot Control Through High-Order Cost Statistics17 Multirobot Data Gathering Under Buffer Constraints and Intermittent Communication18 Image-Guided Dual Master–Slave Robotic System for Maxillary Sinus Surgery19 Modeling and Interpolation of the Ambient Magnetic Field by Gaussian Processes20 Periodic Trajectory Planning Beyond the Static Workspace for 6-DOF Cable-Suspended Parallel Robots1 Computationally Efficient Trajectory Generation for Fully Actuated Multirotor Vehicles2 Aural Servo: Sensor-Based Control From Robot Audition3 An Efficient Acyclic Contact Planner for Multiped Robots4 Dimensionality Reduction for Dynamic Movement Primitives and Application to Bimanual Manipulation of Clothes5 Resolving Occlusion in Active Visual Target Search of High-Dimensional Robotic Systems6 Constraint Gaussian Filter With Virtual Measurement for On-Line Camera-Odometry Calibration7 A New Approach to Time-Optimal Path Parameterization Based on Reachability Analysis8 Failure Recovery in Robot–Human Object Handover9 Efficient and Stable Locomotion for Impulse-Actuated Robots Using Strictly Convex Foot Shapes10 Continuous-Phase Control of a Powered Knee–Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines11 Fundamental Actuation Properties of Multirotors: Force–Moment Decoupling and Fail–Safe Robustness12 Symmetric Subspace Motion Generators13 Recovering Stable Scale in Monocular SLAM Using Object-Supplemented Bundle Adjustment14 Toward Controllable Hydraulic Coupling of Joints in a Wearable Robot15 Geometric Construction-Based Realization of Spatial Elastic Behaviors in Parallel and Serial Manipulators16 Dynamic Point-to-Point Trajectory Planning Beyond the Static Workspace for Six-DOF Cable-Suspended Parallel Robots17 Investigation of the Coin Snapping Phenomenon in Linearly Compliant Robot Grasps18 Target Tracking in the Presence of Intermittent Measurements via Motion Model Learning19 Point-Wise Fusion of Distributed Gaussian Process Experts (FuDGE) Using a Fully Decentralized Robot Team Operating in Communication-Devoid Environment20 On the Importance of Uncertainty Representation in Active SLAM1 Robust Visual Localization Across Seasons2 Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers3 Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots4 The Boundaries of Walking Stability: Viability and Controllability of Simple Models5 A Novel Robotic Platform for Aerial Manipulation Using Quadrotors as Rotating Thrust Generators6 Dynamic Humanoid Locomotion: A Scalable Formulation for HZD Gait Optimization7 3-D Robust Stability Polyhedron in Multicontact8 Cooperative Collision Avoidance for Nonholonomic Robots9 A Physics-Based Power Model for Skid-Steered Wheeled Mobile Robots10 Formation Control of Nonholonomic Mobile Robots Without Position and Velocity Measurements11 Online Identification of Environment Hunt–Crossley Models Using Polynomial Linearization12 Coordinated Search With Multiple Robots Arranged in Line Formations13 Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums14 Online Approximate Optimal Station Keeping of a Marine Craft in the Presence of an Irrotational Current15 Ultrahigh-Precision Rotational Positioning Under a Microscope: Nanorobotic System, Modeling, Control, and Applications16 Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing17 Controlling Noncooperative Herds with Robotic Herders18 ε⋆: An Online Coverage Path Planning Algorithm19 Full-Pose Tracking Control for Aerial Robotic Systems With Laterally Bounded Input Force20 Comparative Peg-in-Hole Testing of a Force-Based Manipulation Controlled Robotic HandISSUE 11 Development of the Humanoid Disaster Response Platform DRC-HUBO+2 Active Stiffness Tuning of a Spring-Based Continuum Robot for MRI-Guided Neurosurgery3 Parallel Continuum Robots: Modeling, Analysis, and Actuation-Based Force Sensing4 A Rationale for Acceleration Feedback in Force Control of Series Elastic Actuators5 Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration6 Interaction Between Inertia, Viscosity, and Elasticity in Soft Robotic Actuator With Fluidic Network7 Exploiting Elastic Energy Storage for “Blind”Cyclic Manipulation: Modeling, Stability Analysis, Control, and Experiments for Dribbling8 Enhance In-Hand Dexterous Micromanipulation by Exploiting Adhesion Forces9 Trajectory Deformations From Physical Human–Robot Interaction10 Robotic Manipulation of a Rotating Chain11 Design Methodology for Constructing Multimaterial Origami Robots and Machines12 Dynamically Consistent Online Adaptation of Fast Motions for Robotic Manipulators13 A Controller for Guiding Leg Movement During Overground Walking With a Lower Limb Exoskeleton14 Direct Force-Reflecting Two-Layer Approach for Passive Bilateral Teleoperation With Time Delays15 Steering a Swarm of Particles Using Global Inputs and Swarm Statistics16 Fast Scheduling of Robot Teams Performing Tasks With Temporospatial Constraints17 A Three-Dimensional Magnetic Tweezer System for Intraembryonic Navigation and Measurement18 Adaptive Compensation of Multiple Actuator Faults for Two Physically Linked 2WD Robots19 General Lagrange-Type Jacobian Inverse for Nonholonomic Robotic Systems20 Asymmetric Bimanual Control of Dual-Arm Exoskeletons for Human-Cooperative Manipulations21 Fourier-Based Shape Servoing: A New Feedback Method to Actively Deform Soft Objects into Desired 2-D Image Contours22 Hierarchical Force and Positioning Task Specification for Indirect Force Controlled Robots。
机器人期刊_SCI

机器人主要研究单位有上海交通大学(SHANGHAI JIAO TONG UNIV)46篇,吉林大学(JILIN UNIV)19篇(主要发表在该校的刊物JOURNAL OF BIONIC ENGINEERING《仿生工程学报》),香港大学(UNIV HONG KONG)18篇,哈尔滨工业大学(HARBIN INST TECHNOL)15篇,中国科学院(CHINESE ACAD SCI)16篇,清华大学(TSINGHUA UNIV)15篇,北京航空航天大学(BEIHANG UNIV)10篇,香港中文大学(CHINESE UNIV HONG KONG)10篇,华中科技大学(HUAZHONG UNIV SCI & TECHNOL)6篇。
1. Science Citation Index
2. Science Citation Index Expanded
3. BIOINSPIRATION & BIOMIMETICS《生物灵感与仿生学》英国
uarterly (注:2008年开始被SCI收录)
ISSN: 1748-3182
1. Science Citation Index Expanded
2. AUTONOMOUS ROBOTS 《自主式机器人》荷兰 2006 IF1.578 2007IF1.413
Bimonthly
ISSN: 0929-5593
SPRINGER, VAN GODEWIJCKSTRAAT 30, DORDRECHT, NETHERLANDS, 3311 GZ
2009年SCI收录机器人学科期刊16种:
1. ADVANCED ROBOTICS《先进机器人学》荷兰 2006 IF 0.318 2007年IF0.504
机器人(无人车)类SCI期刊

============================================期刊刊名影响因子总发文量年度分区ROBOTICS AND COMPUTER-INTEGRATED MANUFACTURING 1.254 89 2010 3分区JOURNAL OF INTELLIGENT & ROBOTIC SYSTEMS 0.757 84 2010 4分区International Journal of Advanced Robotic Systems 0.326 39 2010 4分区International Journal of Humanoid Robotics 0.879 31 2010 4分区Int. J. of Medical Rob. & Comput. Assisted Surg. 1.257 59 2010 4分区IEEE ROBOTICS & AUTOMATION MAGAZINE 2.173 30 2010 2分区INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH 4.095 93 2010 2分区IEEE Transactions on Robotics 3.063 98 2010 2分区ROBOTICA 0.939 90 2010 4分区ADVANCED ROBOTICS 0.653 102 2010 4分区ROBOTICS AND AUTONOMOUS SYSTEMS 1.313 119 2010 3分区Journal of Field Robotics 3.58 44 2010 2分区INDUSTRIAL ROBOT 0.655 55 2010 4分区AUTONOMOUS ROBOTS 2.011 50 2010 3分区INTERNATIONAL JOURNAL OF ROBOTICS & AUTOMATION 0.206 38 2010 4分区============================================【讨论】浸淫了小些日子的我的看法:(1)第一军团都是2分区的,投稿难度与IF基本一致,即IJRR>JFR>TRO>RAM。
人工智能相关的英文特刊
人工智能相关的英文特刊
以下是一些与人工智能相关的英文特刊:
1. AI Magazine: 这本杂志是由学会专门编辑的,其目标是通过发表学术论文、报道新研究和技
术以及讨论人工智能领域的最新趋势来推动人工智能的发展。
2. Journal of Artificial Intelligence Research: 这本期刊专注于人工智能的研究和开发,并发布关
于各种人工智能领域的论文,包括机器学习、自然语言处理、计算机视觉、机器人学等。
3. Information Fusion: 这是一个涵盖多个领域的国际期刊,包括人工智能、数据挖掘、知识图
谱等。
该期刊的宗旨是推动信息融合技术在各个领域中的应用。
4. IEEE Transactions on Pattern Analysis and Machine Intelligence: 这是一个由IEEE发行的期刊,重点关注模式分析与机器智能领域的最新研究成果和技术进展。
5. AI & Society: 这本期刊探讨了人工智能对社会、文化、伦理和法律等领域的影响,并发布了
与人工智能相关的跨学科研究和思考。
以上只是一些与人工智能相关的英文特刊的例子,希望对你有所帮助。
使用学术数据库、在线
期刊库或搜索引擎可以找到更多的资源。
容易中的人工智能SCI期刊推荐11本
容易中的人工智能SCI期刊推荐11本人工智能SCI期刊中,有的容易中,有的难中。
推荐几本容易中的人工智能SCI期刊。
1、Advances in Electrical and Computer Engineering(中科院4区)该期刊的主要目的是汇集计算机科学、人工智能、模式识别、知识工程、过程控制理论和应用、分布式系统和计算机网络、电子、通信、数据传输、软件工程等科学技术领域的最新研究和发展,能量转换器、电驱动系统控制、非常规能量转换、传感器、传感器建模和设计、电物理和纳米技术。
2、JOURNAL OF INTELLIGENT MANUFACTURING(中科院2区)每年出版八次,为智能制造系统的开发者提供了一个独特的国际论坛。
通过发表关于人工智能在制造业中的应用的高质量参考论文,该杂志为研究界和行业从业者提供了重要的联系。
3、JOURNAL OF INTELLIGENT INFORMATION SYSTEMS(中科院4区)《智能信息系统杂志》提供了一个论坛,学术界、研究人员和从业者可以发表高质量、原创和最先进的论文,描述智能信息系统的理论方面、系统架构、分析和设计工具和技术以及实施经验。
4、JOURNAL OF INTELLIGENT & ROBOTIC SYSTEMS(中科院4区)在理论方面,该期刊的论文主要集中在智能系统工程、分布式智能系统、多层次系统、智能控制、多机器人系统、无人驾驶汽车系统的合作与协调等方面。
在应用方面,该杂志强调了自主系统、工业机器人系统、多机器人系统、飞行器、移动机器人平台、水下机器人、传感器、传感器融合和基于传感器的控制。
读者还可以找到关于智能和机器人系统的实际应用的论文(例如,机电一体化、制造业、生物医学、水下、人形、移动/腿机器人和空间应用等)。
5、INTERNATIONAL JOURNAL OF INTELLIGENT SYSTEMS(中科院2区,录用容易,但审稿周期长,约1年)该期刊为有兴趣了解基于智能系统构建的大量理论的个人提供了一个论坛。
ieee robotics and automation letters级别
ieee robotics and automation letters级别
(原创版)
目录
1.IEEE Robotics and Automation Letters 期刊简介
2.期刊的级别和影响力
3.期刊的主要研究领域
4.对中国科研工作者的贡献和影响
正文
IEEE Robotics and Automation Letters 是一本由美国电气和电子工程师协会(IEEE)出版的机器人学与自动化领域的学术期刊。
该期刊旨在为全球范围内的科研工作者提供一个展示机器人学与自动化领域最新
研究成果和进展的平台。
在众多机器人学与自动化领域的期刊中,IEEE Robotics and Automation Letters 的级别和影响力堪称顶级。
该期刊的论文质量高,审稿严格,被全球范围内的科研机构和学术界广泛认可。
同时,该期刊也是机器人学与自动化领域科研工作者发表研究成果的重要载体。
IEEE Robotics and Automation Letters 的主要研究领域包括但不限于机器人控制与规划、机器人视觉与感知、机器人运动学与动力学、人机交互、自动化控制系统等。
这些研究领域均是当前全球范围内机器人学与自动化领域的研究热点和前沿。
对于中国科研工作者而言,IEEE Robotics and Automation Letters 是一个重要的国际交流平台。
通过在该期刊上发表高质量的研究论文,我国的科研工作者不仅可以提升自己的国际学术影响力,还可以与全球范围内的顶尖科研工作者进行深入交流与合作,推动我国机器人学与自动化领域的发展。
自动化核心期刊
自动化核心期刊自动化核心期刊是指在自动化领域具有高影响力和重要性的学术期刊。
这些期刊通常发表与自动化技术、控制系统、机器人技术、人工智能等相关的高质量研究论文。
在学术界,发表在自动化核心期刊上的论文被认为是研究成果的重要标志,对研究人员的职业发展和学术声誉有着重要的影响。
自动化核心期刊的选择对于研究人员来说至关重要。
在选择期刊时,需要考虑期刊的声誉、影响因子、发表质量、审稿周期、论文被引用情况等因素。
以下是一些常见的自动化核心期刊,供您参考:1. IEEE Transactions on Automation Science and Engineering(影响因子:6.764):这是一个由IEEE(Institute of Electrical and Electronics Engineers)出版的期刊,涵盖了自动化科学与工程领域的广泛研究。
该期刊发表了许多高质量的自动化研究论文,包括自动化系统建模与仿真、控制算法与方法、机器人技术、智能控制等方面的内容。
2. Automatica(影响因子:6.793):这是一本由国际自动控制联合会(International Federation of Automatic Control)出版的期刊,是自动化领域的顶级期刊之一。
该期刊涵盖了自动控制、系统理论、优化方法等方面的研究,并且对于理论和应用研究都有很高的要求。
3. Control Engineering Practice(影响因子:3.356):这是一个面向实际应用的自动化期刊,关注自动化技术在工业和工程领域的应用。
该期刊发表了许多关于控制系统设计、工业自动化、过程控制等方面的实用研究论文,对于实际工程应用有很高的参考价值。
4. Journal of Intelligent and Robotic Systems(影响因子:2.212):这是一个涵盖智能机器人和自主系统领域的期刊,发表了许多关于机器人技术、智能控制、自主导航等方面的研究论文。
人工智能与模式识别期刊会议分档

人工智能与模式识别期刊会议分档
研究人工智能与模式识别的期刊会议分档如下:
一、知名期刊:
1.《IEEE Transactions on Artificial Intelligence》,由美国电
气与电子工程师协会出版,是人工智能与模式识别领域的顶级期刊,刊登
了针对机器学习、计算机视觉、自然语言处理、信息安全及其他人工智能
应用的最新及最前沿的研究成果。
2.《IEEE Transactions on Pattern Analysis and Machine Intelligence》,由美国电气与电子工程师协会出版,是探索模式识别及
其应用的期刊,是人工智能及机器学习的实际应用研究期刊,涉及计算机
视觉、图像处理、机器学习、认知科学和模式识别等领域。
3.《Pattern Recognition》,由Elsevier出版,是模式识别领域的
重要期刊,是解决基于模式识别的复杂问题的期刊,其主题涵盖机器学习、计算机视觉、图像处理、交互式系统和生物识别等。
4.《International Journal of Robotics Research》,由Sage出版,是机器人技术领域的顶级期刊,主要关注机器人视觉、机器学习及人
工智能、机器人运动控制、机器人平台和机器人移动技术的研究。
二、会议:
1. International Joint Conference on Artificial Intelligence,它是国际上最重要的人工智能会议,共包括24种不同的学术主题,主要
包括机器学习、计算机视觉、自然语言处理和机器人技术等。
雅马哈工业机器人简介期刊

YYAAMMAAHHAA机机械械手手应应用用领领域域医疗相关 3%民生品 8%其他 9%医药品 摩托车 3%3%保安 0%汽车 31%电器,电子 17%PC相关 26%应应用用特特点点■精密组装机器人 在高速运动状态下具备低残留震动及高精度 应答时间短,动作灵敏 在3维状态下仍然保证轨迹平滑精密■图象机器人 通过机械手及摄像装置的组合可以轻松地满 足多品种生产的需求。
YYAAMMAAHHAA机机械械手手产产品品线线单单轴轴机机械械手手直直交交机机械械手手 水水平平多多关关节节机机械械手手FLIP-X系列TRANSERVO系列XY直交系列XZ直交系列YK四轴系列YP拾放系列FLIP--X系系列列单单轴轴FFLLIIPP--XX的的特特点点1 采用4列2点沟槽导轨,具有较高耐久性4列哥德式沟槽2列哥德式沟槽YAMAHA 必胜差动滑动量小、自 动对齐功能强1、对校准变化和力矩荷 载的适应性强 2、不易损坏摩擦阻抗大,差动滑动量 大1、容易受安装精度、摩擦和弹 性变形的影响 2、低于计算机寿命而导致损 坏2 具有极佳可靠性的绝对系统YAMAHA采用的旋转变压器FFLLIIPP--XX的的特特点点其他机械手的光学编码器不愧是 YAMAHA故障率是光学编码器的1/100使用温度范围是 -55-155℃耐冲击、电气杂音性强具有在汽车、火车、飞机上应用实例与光学编码器相比可靠性 高 可进行绝对位置检出FFLLIIPP--XX的的特特点点3 直接轴联结构YAMAHA其他厂家4列圆弧沟2 列哥特式沟导轨本身可更换。
在型铝中压入铁制的导万一出现故障,在现场可 轨,只要导轨出现故障单独更换马达和滚珠螺杆。
时,必须将整个机械臂全换。
内藏式构造 因为不需要联轴器、 与以前的机种相比,全长缩短多多种种机机型型以以满满足足客客户户需需求求Ttype 无框架结构机型颇具魅力的小巧、低价机型 最适合直接安装在工作台上 作为执行机使用恩!就选 YAMAHAF 带高刚度框架机型type允许负载力矩大、偏执荷载强、 120kg的强大负载,适应多种场合适用于对机械手臂刚度要求高的直 交机器人和轴全体动作的活动臂T6F20多多种种机机型型以以满满足足客客户户需需求求Btype 同步带驱动机型B14H最长行程3050MM,可进行长距离工序间搬运N 螺栓旋转型机型type哇!这么强大反复定位精度±0.01 最大搬运重量80kg 标配双载规格将中空马达连接滚珠螺杆的螺母,在固定螺 丝轴的情况下,旋转螺母移动无危险速度限制,可进行高速搬运最大行程2500mm ,最高速度1200mm/sN15多多种种机机型型以以满满足足客客户户需需求求Rtype旋转轴机型反复定位精度±30s(0.0083°) 可以与其他机型组合使用,用途广泛 通过谐波齿轮驱动,实现高刚度、高精度哇,这都有?拉杆式机型 YMStype具有拉杆对主机可以伸缩的结构 在拉杆前段安装工件进行搬运作业或 用拉杆压住工件进行夹持作业等R20视频欣赏移栽 VIDEOAOI VIDEOTTRRAANNSSEERRVVOO系系列列步步进进单单轴轴新新概概念念步步进进马马达达单单轴轴机机器器人人1 兼具伺服和步进马达优点的新控制方式维持了步进电 机的低成本,实现了 伺服马达的功能和特性新新概概念念步步进进马马达达单单轴轴机机器器人人2 运用环境适应性强的旋转变压器进行闭路控制确保“不失步”,而且 与高级机型一样采用 可靠性更强的旋转变 压器,同时具备高达 20480脉冲/转的高分辨率旋转变压器是电磁式位置传感器。
自动化核心期刊
自动化核心期刊自动化核心期刊是指在自动化领域具有重要学术影响力和高水平论文发表质量的期刊。
这些期刊涵盖了自动控制、机器学习、人工智能、机器人技术等多个研究方向。
在自动化领域,核心期刊是学术界和工业界广泛认可的权威出版物,发表在这些期刊上的论文具有很高的学术价值和实用性。
以下是一些具有代表性的自动化核心期刊:1. IEEE Transactions on Automatic Control(IEEE自动控制系统学报):这是自动化领域最重要的期刊之一,涵盖了自动控制理论、方法和应用的广泛领域。
该期刊发表了很多高质量的研究论文,包括控制系统设计、鲁棒控制、最优控制、自适应控制等方面的研究。
2. Automatica(自动化学报):这是国际上最著名的自动化期刊之一,涵盖了自动控制、系统理论和应用的各个方面。
该期刊发表了很多重要的研究论文,包括系统建模与识别、控制算法与优化、智能控制等方面的研究。
3. International Journal of Robust and Nonlinear Control(鲁棒与非线性控制国际期刊):该期刊专注于鲁棒控制和非线性控制领域的研究。
发表在该期刊上的论文涵盖了鲁棒控制、非线性系统分析与控制、混杂系统控制等方面的研究。
4. Journal of Process Control(过程控制学报):该期刊关注过程控制领域的研究,包括化学工程、生物工程、电力系统等方面的控制问题。
发表在该期刊上的论文涵盖了过程建模与识别、先进控制算法、过程优化等方面的研究。
5. IEEE Transactions on Robotics(IEEE机器人学报):该期刊关注机器人技术领域的研究,包括机器人感知、运动规划、控制与导航等方面的问题。
发表在该期刊上的论文涵盖了机器人学、人工智能、计算机视觉等多个研究方向。
以上仅是自动化核心期刊中的一部分,还有很多其他重要的期刊,如Control Engineering Practice(控制工程实践)、IEEE Control Systems Magazine(IEEE控制系统杂志)等。
AI方向的SCI期刊推荐!

AI方向的SCI期刊推荐!
现如今,我们日常所说的AI指的人工智能,在SCI收录的100多种人工智能期刊中,有的容易接受,有的则很难接受。
对于许多作者来说,发表SCI论文往往很容易。
下面为大家推荐几本AI方向的期刊,供大家参考!
1、Advances in Electrical and Computer Engineering《电气与计算机工程进展》
2、JOURNAL OF INTELLIGENT MANUFACTURING《智能制造杂志》
3、JOURNAL OF INTELLIGENT INFORMATION SYSTEMS《智能信息系统杂志》
4、JOURNAL OF INTELLIGENT&ROBOTIC SYSTEMS《智能与机器人系统杂志》
5、INTERNATIONAL JOURNAL OF INTELLIGENT SYSTEMS 《国际智能系统杂志》
6、MACHINE VISION AND APPLICATIONS《机器视觉及其应用》
7、ROBOTICS AND AUTONOMOUS SYSTEMS《机器人和自主系统》
8、COMPUTER SPEECH AND LANGUAGE《计算机语音与语言》
9、KNOWLEDGE ENGINEERING REVIEW《知识工程评审》
10、Intelligent Data Analysis《智能数据分析》
11、COMPUTATIONAL LINGUISTICS《计算语言学》。
机器人期刊
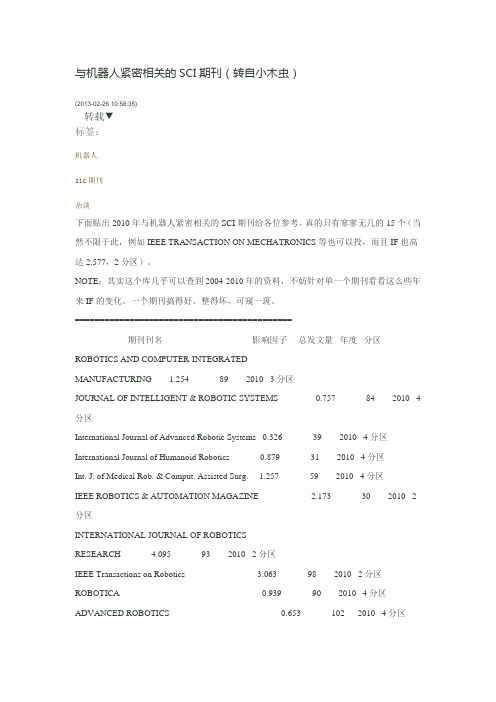
与机器人紧密相关的SCI期刊(转自小木虫)(2013-02-26 10:58:35)转载▼标签:机器人sic期刊杂谈下面贴出2010年与机器人紧密相关的SCI期刊给各位参考。
真的只有寥寥无几的15个(当然不限于此,例如IEEE TRANSACTION ON MECHATRONICS等也可以投,而且IF也高达2.577,2分区)。
NOTE:其实这个库几乎可以查到2004-2010年的资料,不妨针对单一个期刊看看这么些年来IF的变化。
一个期刊搞得好、整得坏,可窥一斑。
============================================期刊刊名影响因子总发文量年度分区ROBOTICS AND COMPUTER-INTEGRATEDMANUFACTURING 1.254 89 2010 3分区JOURNAL OF INTELLIGENT & ROBOTIC SYSTEMS 0.757 84 2010 4分区International Journal of Advanced Robotic Systems 0.326 39 2010 4分区International Journal of Humanoid Robotics 0.879 31 2010 4分区Int. J. of Medical Rob. & Comput. Assisted Surg. 1.257 59 2010 4分区IEEE ROBOTICS & AUTOMATION MAGAZINE 2.173 30 2010 2分区INTERNATIONAL JOURNAL OF ROBOTICSRESEARCH 4.095 93 2010 2分区IEEE Transactions on Robotics 3.063 98 2010 2分区ROBOTICA 0.939 90 2010 4分区ADVANCED ROBOTICS 0.653 102 2010 4分区ROBOTICS AND AUTONOMOUS SYSTEMS 1.313 119 2010 3分区Journal of Field Robotics 3.58 44 2010 2分区INDUSTRIAL ROBOT 0.655 55 2010 4分区AUTONOMOUS ROBOTS 2.011 50 2010 3分区INTERNATIONAL JOURNAL OF ROBOTICS &AUTOMATION 0.206 38 2010 4分区============================================【讨论】浸淫了小些日子的我的看法:(1)第一军团都是2分区的,投稿难度与IF基本一致,即IJRR>JFR>TRO>RAM。
ieee transactions on robotics的投稿流程

ieee transactions on robotics的投稿流程IEEE Transactions on Robotics (T-RO): 投稿流程简介IEEE Transactions on Robotics (T-RO) 是一个重要的学术期刊,致力于发布机器人领域的高质量研究论文。
本文将为您介绍 T-RO 的投稿流程,帮助您顺利将研究成果提交至该期刊。
1. 准备投稿材料:在开始投稿之前,确保您准备好以下材料:- 完整的论文稿件,包括摘要、引言、方法、结果与讨论、结论等部分。
- 所有图表、图像和附件的高质量文件。
- 作者详细信息,包括姓名、联系方式、所属机构和地址。
2. 选择投稿类型:T-RO 接受多种类型的稿件,包括原创研究论文、快速通信、综述文章和特邀文章等。
选择适合您研究成果的投稿类型,并确保您了解每种类型的要求和风格。
3. 访问投稿网站:请访问 T-RO 的官方网站,并找到 "Submission"(投稿)选项。
点击该选项,进入在线投稿系统。
4. 创建账户:如果您是第一次提交稿件给 T-RO,您需要创建一个账户。
按照投稿网站上的指示,填写您的个人信息,创建用户名和密码。
确保您提供的信息准确无误。
5. 输入论文详细信息:在成功创建账户后,您需要输入论文的详细信息。
这些信息可能包括论文标题、摘要、作者信息、关键词等。
请仔细填写这些信息,确保准确和完整。
6. 上传论文稿件:在输入论文详细信息后,您将被要求上传您的论文稿件。
请按照投稿网站提供的要求格式化您的论文,并上传相应文件。
确保文件大小在指定范围内,并符合特定文件类型要求。
7. 确认提交:在成功上传论文稿件后,您将看到一个确认页面。
请仔细检查您提交的所有信息和文件是否准确无误。
如果需要,您可以在这个阶段进行修改或更新。
8. 审稿过程:一旦您确认提交稿件,T-RO 的编辑团队将开始审稿流程。
评审过程可能需要几个月的时间,其中包括论文的匿名评审和审稿人的反馈。
ieee transactions on artificial intelligence 评价

ieee transactions on artificial intelligence 评价
IEEE Transactions on Artificial Intelligence 是一个由 IEEE Computer Society 发布的学术期刊,涵盖了人工智能领域的研究和技术应用。
以下是一些关于这个期刊的常见评价:
1. 学术声誉高:IEEE Transactions on Artificial Intelligence 是一个高声誉的期刊,它由 IEEE 所支持,拥有广泛的国际读者和作者群体。
这使得在该期刊上发表的论文能够吸引到广泛的学术关注和引用。
2. 严格审核:该期刊拥有严格的同行评审流程,有经验丰富的国际专家团队对所有提交的论文进行评审。
这有助于确保发表的论文具有高质量和学术水平。
3. 多样化的研究领域:IEEE Transactions on Artificial Intelligence 涵盖了广泛的人工智能研究领域,包括机器学习、自然语言处理、图像处理、数据挖掘等。
这使得该期刊成为人工智能领域研究和开发者们发表研究成果的理想选择。
4. 学术交流平台:该期刊为人工智能领域的学术研究人员提供了一个交流和分享研究成果的重要平台。
它通过发表高质量的论文,促进了学术界对人工智能领域最新进展的了解和探讨。
总体来说,IEEE Transactions on Artificial Intelligence 是一个备受关注的学术期刊,它以其高学术声誉和严格的审核过程成为了人工智能领域研究者们分享研究成果的首选平台。
机器人相关的中文核心
机器人相关的中文核心
以下是一些与机器人相关的中文核心期刊:
1. 《机器人》:是中国自动化学会和中国科学院沈阳自动化研究所主办的学术期刊,主要刊登机器人领域的基础理论、技术应用、工程实践等方面的研究成果。
2. 《自动化学报》:是中国自动化学会主办的学术期刊,主要刊登自动化领域的基础理论、技术应用、工程实践等方面的研究成果。
3. 《控制理论与应用》:是中国自动化学会控制理论专业委员会主办的学术期刊,主要刊登控制理论及其应用领域的研究成果。
4. 《计算机集成制造系统》:是中国机械工程学会主办的学术期刊,主要刊登计算机集成制造系统领域的研究成果。
5. 《模式识别与人工智能》:是中国自动化学会模式识别与机器智能专业委员会主办的学术期刊,主要刊登模式识别与人工智能领域的研究成果。
这些期刊都是机器人领域的重要学术期刊,对于了解机器人领域的最新研究进展和技术应用具有重要的参考价值。
SCI、EI收录的自动控制类期刊
SCI、EI收录的自动控制类期刊自动控制是一门涉及到数学、计算机科学、物理学、机械工程等多个学科的交叉学科。
自动控制在工业生产、交通运输、军事、航天等领域都有着广泛的应用。
因此,有很多SCI、EI收录的自动控制类期刊。
本文将介绍几个SCI、EI收录的自动控制类期刊。
1. AutomaticaAutomatica是自动控制领域最著名的期刊之一。
该期刊由国际自动控制联合会(IFAC)出版。
Automatica于1963年首次出版,现已成为公认的领先的国际期刊之一。
该期刊主要发表自动控制、系统理论和应用领域的研究论文。
该期刊的影响因子一直保持较高水平,2019年时影响因子为5.781。
此外,Automatica期刊的文章也经常被其他期刊引用。
该期刊每年出版6期,其中每年固定出版一期“IFAC World Congress”。
2. IEEE Transactions on Automatic ControlIEEE Transactions on Automatic Control是IEEE计算机学会的一个期刊,主要关注自动控制领域的研究方向。
该期刊在1975年成立,目前是自动控制领域中最具有影响力和权威性的期刊之一。
该期刊发表的研究方向涵盖了系统理论、控制理论、组合和动态系统等领域。
IEEE Transactions on Automatic Control的影响因子一直保持在相对较高的水平上,2019年影响因子为5.585。
该期刊每年出版12期。
3. International Journal of ControlInternational Journal of Control是一个SCI收录的自动控制期刊,它发表的文章涉及控制科学、机械工程、电子技术、信息技术等领域。
该期刊于1963年创刊,到目前为止,发表了许多质量很高的论文。
该期刊被认为是自动控制领域中综合性最强的期刊之一。
该期刊的影响因子在过去十年中一直保持在相对较高的水平上,2019年的影响因子为3.599。
机器人著名期刊会议研究机构

一、机器人领域的重要期刊:排名前十的期刊Advanced RoboticsAutonomous RoboticsIEEE Transactions on Robotics (T-RO)IEEE Transactions on Automation Science and Engineering (T-ASE)IEEE Transactions on Image ProcessingIEEE Transactions on Robotics and Automation (T-RA, published from March 1985 to June 2004, replaced by T-RO and T-ASE)IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI)IEEE Transactions on Control Systems Technology (T-CST)Industrial RobotInternational Journal of Robotics ResearchInternational Journal of Robotics and AutomationJournal of Intelligent and Robotic SystemsJournal of Field RoboticsThe International Journal of Medical Robotics and Computer Assisted SurgeryJournal of Robotic SystemsMechatronicsRoboticaRobotics & Automation MagazineRobotics and Autonomous Systems(引自/)二、机器人领域的国际会议:IEEE国际会议检索:/web/conferences/callforpapers/index.html 会议名称链接及介绍2008 International Conference on Information and Automation (ICIA)/down/CFP.pdf Conference Location: Changsha, ChinaSponsored By: Robotics and Automation Society - RA Abstract Submission Deadline: 15 Jan 2008Final Paper Submission Deadline: 15 Apr 20082008 IEEE/ASME International C onference on Advanced Intellig ent Mechatronics (AIM)02 Jul - 05 Jul 2008 /cfpConference Location: Xian, ChinaSponsored By: Industrial Electronics Society - IE, Robotics and Automation Society - RAAbstract Submission Deadline: 01 Mar 2008Final Paper Submission Deadline: 10 May 200817th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control (ROMANSY 2008)/ Jul 5 - 9 2008, Tokyo, Japan2008 RO-MAN: The 17th IEEE Int ernational Symposium on Robot and Human Interactive Communic ation01 Aug - 03 Aug 2008 http://www.lsr.ei.tum.de/ro-man2008/Conference Location: Munich, GermanySponsored By: Industrial Electronics Society - IE, Robotics and Automation Society - RA, Systems, Man, and Cybernetics Society - SMCAbstract Submission Deadline: 01 Feb 2008Final Paper Submission Deadline: 20 May 20082008 IEEE International Confer ence on Multisensor Fusion and Integration for Intelligent S ystems (MFI 2008) 20 Aug - 22 Aug 2008 /Conference Location: Seoul, Korea (South)Sponsored By: Industrial Electronics Society - IE, Robotics and Automation Society - RAAbstract Submission Deadline: 01 Mar 2008三、国外著名机器人研究所:注:由于国外网站登录困难,只链接到卡内基梅隆大学机器人研究所,其余的参考如下网址:http://www.ifi.unizh.ch/ailab/links/robotic.html#journals(特别推荐),里面有更为名单更为详细的研究所和期刊等链接四、国内机器人论坛:/资源网站://chinese/Class3.html机器人爱好者/机器人自己做/机器人爱好者/gb/technology/robot/机器人科技博览/中国机器人网/机器人空间/机器人在线/gb/technology/cybernetics/index.html自动化博览/军事网址/ziliao/军事资料日本机器人著名机构1.AIST2.东京工业大学3.早稻田大学4.东京大学5.东北大学6.名古屋大学德国——法国——英国——西班牙德国:1.University Karlsruhe2.亚琛工业大学3.斯图加特大学4.柏林工业大学5.慕尼黑工业大学法国:IS2.INFR HIRP3.蒙不利尔德国人适合做警察,意大利人适合做导游,法国人适合做厨师国际期刊:1.IEEExplore2.Medical Image Analysis (Elsevier)3.Computer Aided Surgery (Wiley)4.IEEE Transactions on Medical Imaging5.Pattern Recognition (Elsevier)6.Pattern Recognition Letters (Elsevier)7.IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE Computer Society) 8.CVGIP: Image Understanding (Elsevier)9.CVGIP: Graphical Models and Image Processing (Elsevier)10.Image and Vision Computing (Elsevier)11.Computer Vision and Image Understanding (Elsevier)12.International Journal of Computer Vision (Kluwer)13.IEEE Trans. on Robotics & Automation, Special issue on Medical Robotics14.IEEE Trans. on Medical Imaging, Special issue on Intraoperative Image Processing for Surgical Guidance15.IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS(SCI)16.BME:Biomedical Engineering17.Mechatronics18.IEEE PAMI:IEEE Transaction on Pattern Analysis and Machine Intelligence(模式分析和机器智能汇刊)19.JBJS:The Journal of Bone and Joint Surgery国际会议:1.ICRA:International Conference Robotics & Automation2.IROS:International Conference on Intelligent Robots and Systems3.MICCAI:Medical Image Computing and Computer-Assisted Intervention4.CARS:Computer Assisted Radiology and Surgery5.CAOS:International Society for Computer Assisted Orthopaedic Surgery6.CME:Complex Medical Engineering7.ROBIO:International Conference on Robotics and Biomimetics Program8.IARP Workshop on Medical Robotics, Hidden Valley, May 20049.EURON Research Roadmap, April 200410.MICCAI, Tutorials “From mini-invasive surgery to endocavitary / endoluminal interventions”11.Summer European University in Medical Robotics12.IEEE RO:International Symposium on Robot and Human Interactive Communication(机器人与人类交互合作国际会议)国内期刊:1.《中华创伤骨科杂志》专刊“计算机辅助骨科导航技术”,7(7),2005.2.《中华骨科杂志》专刊“计算机辅助手术”,26(10),2006.3.《北京航空航天大学学报》4.《高技术通讯》中英文两版5.《机器人》6.《系统仿真学报》7.《机械工程学报》重要网站:1.东京大学:http://bmpe.t.u-tokyo.ac.jp2.美国卡耐基梅隆大学:/centers/mrcas/index.html3.瑞士伯尔尼大学:http://www.unibe.ch/index.php4.美国匹兹堡大学:/dept/dept.asp5.香港中文大学生物医学工程部:.hk/gb/.hk/ 6.1. 国内:一级刊物;(1)《机械工程学报》(2) 《自动化学报》(3) 《航空学报》(4) 《机器人》(5)《高技术通讯》中英文两版(6)《北京航空航天大学学报》(7)《机器人》(8)《系统仿真学报》2. 国际机器人顶级期刊:(1) 《IEEE Transactions on Robotics》IEEE transaction on robotics;(2) 《IEEE Transactions on Robotics and Automation》(3) 《International Journal of Robotics and Automation》(4) 《IEEE Transactions on System, Man and Cybernetics (Series B)》(5) 《Journal of Robotic Systems》(6)《International Journal of Humanoid Robotics》(7) IEEE transaction on parallel and distributed systems;(8) IEEE transaction on automatic control;(9) IEEE transaction on industrial electronics;(10) IEEE transaction on control systems and technology;(11) IEEE transaction on industriy applications;(12) IEEE transaction on automation science and engineering;3. 机器人和自动化领域的顶级国际会议(1) ICRA : IEEE International Conference on Robotics and Automation (ICRA)、(2) IROS : IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(3) URAI : Ubiquitous Robots and Ambient Intelligence(URAI)(4) IPDPS:International Parallel and Distributed Processing Symposium国际并行计算与分布式座谈会(5) ISIE: IEEE International Symposium on Industrial Electronics(6) ISCIRA:International Symposium on Computational Intelligence in Robotics and Automation(7) SICE:(8) IECON:(1) DAC:(2) ICDCS,(3) IPDPS,(4) RTSS,(5) ACC,(6) ICMIC,(7) ICIEA(8) ASME4. 嵌入式开发学习网站(1)嵌入式在线/(2)嵌入式开发网/(3)嵌入式资讯网/index.php(4)嵌入式研究网/(5)中国自动化网/(6)GEC-广嵌广东省嵌入式软件公共技术中心/5. 今年与嵌入式组相关的、还能够进行投稿的几个国际会议(1) MESA08 --- 2008 IEEE/ASME International Conference on Mechatronic andEmbedded Systems and Applications Beijing, China, October 12-15, 2008ObjectivesMechanical and electrical systems show an increasing integration of mechanics with electronics and information processing. This integration is between the components (hardware) and the information-driven functions (software), resulting in integrated systems called mechatronic systems. The development of mechatronic systems involves finding an optimal balance between the basic mechanical structure, sensor and actuators, automatic digital information processing and control in which embedded systems play a key role. The field of embedded system and mechatronics is becoming evermore challenging; issues in embedded software lie at the focus of researchers both in industry and academia. The goal of this 4th IEEE/ASME MESA, MESA08, is to bring together experts from the fields of mechatronic and embedded systems, disseminate the recent advances made in the area, discuss future research directions, and exchange applicationexperience. The conference program is organized in a number of symposia.VenueMESA08 will be held together along with the 11th Intl IEEE Conf on Intelligent Transportation Systems and 2008 IEEE Intl Conf on Service Operations and Logistics, and Informatics.Paper SubmissionComplete manuscripts in PDF format must be electronically submitted to the conference website . Submitted manuscripts should be six (6) pages or less in IEEE two-column format, including figures, tables, and references.Important DatesJune 1, 2008 Full paper, proposal for special session, workshop and tutorialJuly 15, 2008 Notification of acceptanceAugust 15, 2008 Camera ready paper submission(2) SEC 2008.hk/sec08/The IEEE SEC is aiming to be a premier international conference in embedded computing.This symposium is to bring together computer scientists, industrial engineers and researchers to discuss and exchange experimental or theoretical results, novel designs, work-in-progress, experience, case studies, and trend-setting ideas in the area of embedded computing include all aspects of embedded computing systems with emphasis on algorithms, systems, models, compilers, architectures, tools, design methodologies, test and applications.Beijing,China,Oct 6-8,2008Submission Due Date: April 2, 2008(3) 2008 International Conference on Intelligent Robotics and ApplicationsOctober 15-17, 2008, Wuhan, China/IntroductionThe International Conference on Intelligence and Robotics and Applications (IRA 2008), will be held on October 15 to 17, 2008 in Wuhan, China. The goal is for broad coverage and dissemination of foundational research on intelligent robotics and its applications among researchers, academicians, and industry practitioners. The theme is on scientific methods and industrial applications for manufacturing robotics.Important DatesSubmission of abstracts and full papers: May 18, 2008Paper acceptance notification: June 20, 2008Final paper submission: July 10, 2008Note: The abstracts and the full papers should be submitted at the same time. The abstracts don't need to be reviewed.(4) The 2008 IEEE/IFIP International Conference On Embedded and Ubiquitous Computing(EUC 2008) ecember 17-20,2008 Shanghai,China/euc2008/callforpaper.htmlIntroductionEmbedded and ubiquitous computing is an exciting new paradigm that provides computing and communication services all the time and everywhere. Its systems are now affecting every aspect of our life to the point that they are hidden inside various appliances. This emergence is a natural outcome of research and technological advances in embedded systems, pervasive computing and communications, wireless networks, mobile computing, distributed computing and agent technologies, etc.Important DatesWorkshop Proposal:1 April 2008Paper submission due:20 May 2008Acceptance notification:18 August 2008Camera-ready due:22 September 2008Author registration:22 September 2008Conference:17-20 December 2008。
世界一流科技期刊文章精选
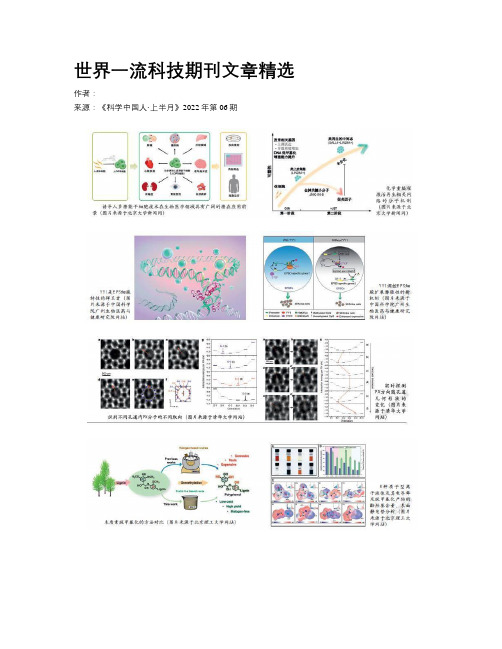
世界一流科技期刊文章精选作者:来源:《科学中国人·上半月》2022年第06期泡泡铸造软体机器人技术《自然》封面:人造肌肉和夹具。
《自然》杂志第7884期封面文章报道了泡泡铸造软体机器人新技术。
软体机器人能执行多种复杂任务,包括抓握、爬行或游泳等,近年来泡泡铸造软体机器人受到学术界的普遍关注。
但是,制造此类软体致动器一直较为烦琐。
科学家们开发了一种基于泡泡的方法,能用来制造各种基于弹性聚合物的致动器。
他们先将液态弹性体注入模具,随后注入空气,从而得到一个拉长的泡泡。
这个泡泡会在重力作用下上升,并形成致动器的内部腔室,通过改变模板和流动过程,就能得到各种各样的复杂结构。
心咽部结构拆解与原始被囊动物的固着生活方式《自然》封面:“住屋”是一类生物特有的一种胶质滤食结构。
《自然》杂志第7885期封面文章报道了被囊动物的演化研究。
被囊动物(如海鞘)与脊椎动物的亲缘关系最近。
这类海洋生物大部分在幼体时能自由游动,但在变成定栖的成体后会固着、无法移动。
然而,尾海鞘纲的被囊动物不会发生这种转变,终生都能自由游动。
研究团队聚焦尾海鞘纲的心脏发育,发现它们的心咽部基因调控网络因大规模基因丢失而“拆解”。
这种拆解导致其失去了原始被囊动物特征性的固着生活方式。
这或许与“住屋”这类帮助尾海鞘纲从固着生活方式演化适应有关。
山岳地形对北美季风的机械强迫作用《自然》封面:一场季风暴雨穿过亚利桑那州东南部时的一道闪电。
《自然》杂志第7886期封面文章报道了北美季风的差异。
在夏季,一个强降雨帶沿墨西哥西海岸延伸至美国西南部、长达一千多公里,构成了北美季风。
一般认为季风是太阳对海洋和陆地加热不均所致。
这会导致气压变化,最终形成的风会拖动凉爽潮湿的海洋空气在陆地上产生降雨。
研究表明,墨西哥的马德雷山脉令急流转向,抬升了暖湿空气,形成对流型降雨。
虽然地面加热也会发生,但其影响不足,北美季风应该是在机械强迫作用下形成的。
人类直觉与AI推动数学进步《自然》封面:人工智能引导的直觉。