龙门轴回参考点
龙门铣床操作规程

龙门铣床操作规程特别注意: 1 切削功率不得大于额定功率,2 主轴转速不得高于额定转速,2000转/分3粗加工及切削力大时,用低挡主轴转速。
精加工及切削力小时,用高挡主轴转速。
1.操作人员应熟悉所用数控铣床的组成,结构以及规定的使用环境,并严格按机床操作手册的要求正确操作,尽量避免因操作不当而引起的故障。
2.操作机床时,应按要求正确着装。
3.机床通电后,检查各开关、按钮和按键是否正常、灵活,机床有无异常现象。
4.检查电压、油压、气压是否正常,有手动润滑的部位要进行手动润滑。
5.导轨护罩上不得有异物。
6.按顺序开、关机床。
先开机床后开数控系统,先关数控系统后关机床。
7.开机后进行返回机床参考点操作,以建立机床坐标系。
即各坐标轴手动回零。
8.开机后让机床低速空运转五分钟以上,以使机床充分润滑。
9.程序输入后,应认真核对,保证无误。
10.按工艺规程安装,找正夹具。
11.正确对刀,确定并输入工件坐标系,并核对数据。
12.未装工件前,空运行一次程序,看程序能否顺利进行,刀具和夹具安装是否合理,有无超程现象13.刀具补偿值输入后,要对刀具号、刀沿号、正负号进行认真核对。
14.检查各刀头的安装方向及各刀具旋转方向是否符合程序要求。
15.检查各刀具形状和尺寸是否符合加工工艺要求,是否碰撞工件和夹具。
16.镗刀头尾部露出刀杆直径部分,必须小于刀尖露出刀杆直径部分。
17.不管是首件试切,还是周期性重复加工,第一件都必须对照图纸进行,逐把刀具的试切。
18.试切进刀时,进给倍率开关必须打到零位。
19.每把刀首次使用时,必须先验证它的实际长度与所给刀具补偿值是否相符。
20.试切进刀时,在刀具运行至工件表面30—50 mm处,必须在进给保持下,验证Z轴和X、Y轴坐标剩余值与加工程序是否一致。
21.试切和加工中,刃磨刀具和更换刀具后,要重新测量刀具长度并修改刀具补偿值。
22.程序修改后,对修改部分要仔细检查。
23.程序调试好后,在正式切削加工前,再检查一次程序、刀具、夹具、工件参数等是否正确。
教学案例1机床不能正常返回参考点

教学案例1机床不能正常返回参考点参考点(Reference point)——是数控厂家通过在伺服轴上建立一个相对稳定不变的物理位置作为参考点,又称电气栅格。
所谓返回参考点,严格意义上是回到电气栅格零点。
(数控机床分为机械坐标零点、工件坐标零点、电气栅格零点——参考点。
我们加工时所使用的工件坐标零点(G54~G59),是在参考点的基础上进行一定量的偏置而生成的(通过参数)。
所以当参考点一致性出现问题时,工件零点的一致性也丧失,加工精度更无从保证。
目前建立参考点的方式主要分为两种:(1)增量方式(reference position with dogs)也称为有档块回零,在每次开电后,需要手动返回参考点,当“机械档块”碰到减速开关后减速,并寻找零位脉冲,建立零点。
一旦关断电源,零点丢失。
(2)绝对坐标方式(absolute-position detector)每次开电后不需要回零操作,零点一旦建立,通过后备电池将绝对位置信息保存在特定的SRAM区中,断电后位置信息也不丢失,这种形式被称为绝对零点。
不能正常返回参考点(增量方式)故障表现形式为:情况1:手动回零时不减速,并伴随超程报警情况2:手动回零有减速动作,但减速后轴运动不停止直至90# 报警——伺服轴找不到零点情况3:手动回零方式下根本没有轴移动那么我们从分析整个返回参考点的工作过程和工作原理入手。
原理及过程过程分析:1)回参考点方式有效(ZRN)(MD1/MD4)——对应PMC地址G43.7=1,G43.0=1/G43.2=1。
2)轴选择(+/-Jx)有效——对应PMC地址G100~G102=1。
3)减速开关读入信号(*DECx)——对应PMC地址X9.0~X9.3或G196.0~3=101。
4)电气格被读入,找到参考点。
增量式回零过程:图13-1 回参考点过程这里需要详细说明的是“电气栅格”。
FANUC 数控系统除了与一般数控系统一样,在返回参考点时需要寻找真正的物理栅格——编码器的一转信号(如图13-1所示),或光栅尺的栅格信号(如图13-2所示)。
数控机床回参考点方式及故障分析

数控机床回参考点方式及故障分析摘要:回参考点是数控机床的重要功能之一,能否正确地返回参考点,将会影响到零件的加工质量。
本文分析了数控机床几种回参考点的方法及回参考点常见的故障。
关键词:数控机床参考点编码器减速开关0引言目前大多数的数控机床采用增量式编码器作为位置检测装置,系统断电后位置检测装置靠电池来维持坐标值的记忆,但只记忆机床断电前的坐标值而不是机床的实际位置,所以机床首次启动系统后,要进行返回参考点操作,使系统的位置记数与脉冲编码器的零位脉冲同步,机床就需要回参考点。
机床执行回参考点操作具有以下优点:(1)系统通过参考点来确定机床的原点位置,以正确建立机床坐标系;(2)可以消除丝杠间隙的累计误差及丝杠螺距误差补偿对加工的影响。
1.机床返回参考点的几种方式(1)回参考点的Z脉冲方式(零脉冲方式)手动回原点时,回原点轴先以参数设置的快速速度Fr向原点方向移动,当原点减速撞块压下原点减速开关时,伺服电动机减速至由参数设置的接近原点速度F1继续向前移动;当减速撞块释放减速开关后,数控系统检测到编码器发出的第一个栅点或零标志信号时,归零轴停止,此停止点即为机床参考点,如图1所示。
图1(2)回参考点的“+、-”方式回原点轴先以快速进给速度Fr向原点方向移动,当原点减速开关被减速撞块压下时,回原点轴制动到速度为零,再以接近原点速度F1向相反方向移动;当减速撞块释放原点接近开关后,数控系统检测到反馈元件(如编码器)发出的第一个栅点回零标志信号时,回零轴停止,该点即机床原点,如图2所示。
图2(3)回参考点的“+、-、+”方式回原点时,回原点轴先以快速进给速度Fr向原点方向移动,当减速撞块压下减速开关时,回归原点轴制动到速度为零,再向相反方向以F1速度微动;当减速撞块释放减速开关时,归零轴又反向以F1速度沿原快速进给方向移动;当减速撞块再次压下减速开关时,归零轴仍以接近原点速度F1前移;减速撞块释放减速开关后,数控系统检测到第一个栅点或零标志信号时,归零轴停止,机床原点随之确立,如图3所示。
维修中840D系统常见到的问题

840D系统在维修中的问题1:装载标准机床数据;正常情况下在PCU50上服务———数据输入——文档或NC卡的备份NC 数据回装到PCU50上。
正常情况下,有的厂家用PLC 控制数据通信,在回装时回出现通信故障,就要清除PLC数据然后再回装NC数据在有些时候回装NC数据时会报警为“至少一个轴模块未被发现”因为缺省值关系没有回装进去,重复回装NC数据能解决此问题。
PLC 总清操作步骤如下:(1)将PLC 启动开关S4 “2”;=> PS 灯会亮。
(2)S4 “3”并保持约3 秒直等到PS 灯再次亮;=> PS 灯灭了又再亮。
(3)在3 秒之内,快速地执行下述操作S4:“2”“3”“2”;=> PS 灯先闪,后又亮,PF 灯亮。
(有时PF 灯不亮)(4)等PS 和PF 灯亮了,S4 “0”;=> PS 和PF 灯灭,而PR 灯亮。
PLC 总清执行完成。
如PLC 总清后屏幕上有报警可作一次NCK 复位(热启动)。
NC 总清NC 总清操作步骤如下:(1)将NC 启动开关S3 “1”;(2)启动NC,如NC 已启动,可按一下复位按钮S1;(3)待NC 启动成功,七段显示器显示“6”,将S3 0”;NC 总清执行完成。
NC 总清后,SRAM 内存中的内容被全部清掉,所有机器数据(Machine Data)被预置为缺省值。
2:密码问题:如果条件准许,备份好NC、PLC数据,清NC数据,读回备份数据,此时制造商的密码又是SUNRISE3:取消屏保的方法再系统上按如下步骤操作:startup MMC Editor编辑F:\MMC2\MMC.INI文件中Mmcssreen off time in minutes =5Catency for screen saver 将设定值改为0即可4:PCU50上的USB如何激活HMI的操作系统必须是WINDOWS XP系统需要修改下F:\MMC2\mmc.ini文件,找到其中floppydisk=A改为Floppydisk=G因为系统盘又C D E F 四个驱动器,当U盘插上后,系统自动默认其为G 盘5:880系统的口令?默认的是1 1 1 1 ,如果自己改过但忘记了,可以用下面的指令读出(在MDI或者程序中输入然后执行)@300 R1 K11 此指令是把第11号参数读入R1然后看R1就知道密码?6:西门子带报闸的电机,报闸线圈为直流24V,一般在PLC编制时利用位置环生效控制刹车,当出现急停时,伺服使能关断位置环失效而启动报闸,反之,使能加上后位置环生效报闸打开。
数控回参考点操作方法
数控回参考点操作方法
数控回参考点是指机床在进行数控加工时,通过一系列操作将工件返回到参考点的位置。
具体的操作方法如下:
1. 在程序中设置回参考点的位置。
在数控加工程序中,一般会有一个回参考点的指令,用来设置机床需要返回的位置坐标。
2. 运行数控加工程序。
启动机床的数控系统,加载并运行数控加工程序。
3. 开始加工。
在加工过程中,机床会按照程序中的指令进行相应的加工操作,直至加工完成。
4. 回参考点操作。
当加工完成后,机床会执行回参考点操作,其中包括以下步骤:
- 解除工件夹持。
机床将松开工件的夹持装置,使得工件可以自由移动。
- 移动到回参考点位置。
机床会按照程序中设置的回参考点位置坐标,使得工件返回到参考点的位置上。
- 确认位置。
机床会通过传感器等方式检测工件是否准确到达参考点的位置,以确保位置的准确性和稳定性。
5. 完成回参考点操作。
当机床确认工件已经准确到达参考点的位置后,回参考点操作就完成了。
需要注意的是,回参考点操作的具体步骤可能会因机床类型、数控系统和加工工艺等因素而略有不同,以上只是一般情况下的操作方法。
在实际应用中,操作人员应根据具体情况进行操作,并注意遵守操作规程和注意事项,以确保操作的安全性和有效性。
机床回参考点原理及故障处理.

在电机和丝杠上分别做一个记号, 拧紧联轴节 然后在运行该轴,观察其记号 更换位置编码器,并观察 偏差更换后,故障是否消 除 重新计算参考点计数器容量 特别是在0.1μ 的系统里, 更要按照说明书,仔细计 算 更换伺服控制扳或接口模 块
5
6
返回参考点异常,并在显示器屏幕上出现Alarm90 参考点返回时,位置偏差量未超过128时,位置误差量 可以在诊断画面里确认。 3/6/0系统诊断号为800~803 ; 16/18系统的诊断号为 300 a, 检查确认快进速度 b,检查确认快进速度的倍率选择信号(ROV1、ROV2) c,检查确认参考点减速信号(*DECX) d,检查确认外部减速信号±*EDCX e, 离参考点距离太近。 2、参考点返回时,位置偏差量超过128时。 a)位置反馈信号的1转信号没有输出。 b)位置编码器不良 c)位置编码器的供给电压偏低,一般不能低于4.8v
机床回参考点原理及故障处理 <使用挡块和限位开关>
通过接收安装在机床上的限位开关送出的信号(*DEC),检取 CNC 内部产生的电动机每转的栅格信号使伺服电动机Βιβλιοθήκη 止,将该位 置定为参考点。 ■动作概要
返回参考点时,出现偏差的故障分析与处理 (1)参考点位置偏差1个栅格
可能原因 项 目 如何检查 解决办法
(2)参考点返回位置是随机变化的
可能原因 项目 如何检查
1
干扰
a)检查位置编码器反馈信号线是否 屏蔽; b)检查位置编码器是否与电机动力 线分开
检查编码器供电电压不能低于 4.8V
屏敝位置编码器反馈信号 线; 分离位置编码器与电机动 力线
2 3 4
位置编码器的 供电电压太低 电机与机械的 联轴节松动 位置编码器不 良 回参考点计数 器容量设置错 误 伺服控制板或 伺服接口模块 不良
一种龙门式多主轴制孔组合机床的零点定义与标定方法

一种龙门式多主轴制孔组合机床的零点定义与标定方法龙门式多主轴制孔组合机床是一种多功能、高效率的机床设备。
在使用这种机床进行加工之前,需要进行零点的定义和标定,以确保加工的准确性和稳定性。
以下是一种零点定义与标定方法,希望对您有所帮助。
首先,零点定义是指确定机床工作坐标系的原点位置,用于指导加工程序的编写和加工过程的控制。
而标定则是通过特定的步骤和工具,确定机床各轴的零点和工件的位置。
第一步是确定机床工作坐标系的原点位置。
通常情况下,我们会选择工作台面上的一个固定位置作为原点。
这个位置应该能够方便地与加工程序中定义的坐标系相对应。
第二步是确定各个轴的零点位置。
不同的轴有不同的零点,一般是通过机床控制系统中的相关命令进行设置。
对于龙门式多主轴制孔组合机床来说,通常有X、Y、Z三个轴,我们需要分别进行设置。
可以通过移动工作台和主轴进行微调,使得刀具和工件能够准确地对齐。
第三步是确定工件的位置。
在进行制孔操作之前,需要将工件放置在机床工作台上,并与刀具对齐。
这个过程可以通过机床上的调整装置和测量工具来完成。
确保工件的位置准确无误,可以使用机床上的传感器和测量系统来进行检查。
第四步是进行零点的标定。
为了确保加工的准确性和稳定性,我们需要将零点的位置进行标定。
这可以通过机床控制系统中的相关功能完成。
一般情况下,我们会选择一个容易识别和测量的特定点作为参考点。
通过在工件上进行标记,并利用测量工具进行精确定位,确定标定点的位置。
然后将这些信息输入到机床控制系统中,完成零点的标定。
在进行零点定义和标定之前,我们需要确保机床和测量工具的准确性和稳定性。
这可以通过定期的维护和校准来实现。
同时,操作人员需要具备一定的专业知识和技能,能够熟练地操作机床和测量工具,遵守相关的操作规程和安全规定。
综上所述,龙门式多主轴制孔组合机床的零点定义与标定方法是一个重要的过程,它直接影响着加工的准确性和稳定性。
通过合理的步骤和操作,可以确保机床和工件的位置准确无误,为后续的加工操作提供有力支持。
数控机床返回参考零点的作用
数控机床返回参考零点的作用
数控机床零件加工是建立在机床零点之上的。
数控机床零点是机床坐标系的零点,它由机床厂家事先确定的。
但这仅仅是机械意义上的,计算机数控系统还是不能识别,即数控系统并不知道以哪一点作为基准对机床工作台的位置进行跟踪、显示等。
为了让系统识别机床原点,以建立机床坐标系,需要附设一个参考点。
机床参考点是数控机床上一个特别位置的点,该点通常位于机床正向极限点四周,它与机床零点的转换关系可以在数控系统参数中设定。
因此机床找到参考点位置,也就确定了该坐标轴的零点位置,数控系统就建立起了机床坐标系,可以进行正常的加工工作。
数控机床在接通电源后要做回零的操作,就是由于在机床断电后,失去了对各坐标位置的记忆,所以在接通电源后,必需让各坐标轴回到机床一固定点上,这一固定点就是机床坐标系的原点或零点,也称机床参考点。
使机床回到这一固定点的操作称为回参考点或回零操作。
数控机床回参考点的好处如下:
(1)系统通过返回参考点来确定机床的原点位置,以正确建立机床坐标系。
(2)螺距误差补偿及反向间隙补偿有效,软极限行程爱护有效。
回参考点是数控机床的重要功能之一,能否正确地返回参考点,将会影响到零件的加工质量。
同时,由于数控机床是多刀作业,每一把刀具的刀位点安装位置不行能调整到同一坐标点上,因此就需要用刀
具补偿来校正,如加工中心刀具的长度补偿和数控车床车刀刀尖的位置补偿,这种刀具偏置的补偿量也是通过刀位点的实际位置与由参考点确立的基本坐标系比较后补偿得到的。
浅谈数控机床回参考点及故障分析处理
摘 要: 机床 参考点是机床机械 原点与 电气原点 相重合的 点, 是建立工件 坐标 系的关
键, 本文主要介 绍 了机床 回参 考点 的几种 常见方 法及回参 考点 的动作过 程 , 而形成数 从
控机床 回参考点故障分析 思路 , 同时介 绍 了常见的机床 回参 考点故障原 因与处理方法 。
得准 确的位置值 。
关 ,采用何种 方式或如 何运行 ,系统都 是通 过 P C的程 序编制 和数控 系统 的机 床参数 设定来 L
决 定 , 的运动速度 也是在机 床参数 中设定 的。 轴 数 控系统 回参考点 的过程是 P C系统与数控 系 L 统 配合完 成的 ,由数控 系统给 出 回参 考点 的命
速挡块 位置不 正确或松动 ;减 速挡块 的长度 太 短; 回参考点 用的减速 开关的位 置不 当或松 动 , 该 故障一般在 机床大修 后或 长期使用 未保 养 时
发生 。
检测 反馈元件 发 出的栅 点信号 或零标志 信号确
立 的参考点 。每 台数 控机床 可以有一个 参考 原 点 , 可以按需要设 置多个参考原 点。控制 系统 也 启动 后 , 多数 机床要 自动返 回参考点 , 并重新 获
关键 词 : 参考点 ; 减速 开关 ; 故障 分析
黑龙江 李 战梅
数控 机床 是集 机械 制 造 、 计算 机 、 液压 、 气
即停 止 , 该停止点被认 做参考点 。 栅点法 的特点
是 如果接近 原点速度小 于某一 固定值 ,则伺 服 电机 总是停 止于 同一点 , 也就是说 , 在进 行 回参 考 点操作后 , 机床参 考点的保持性好 。磁 开关 法 的特点是软 件及硬件 简单 ,但参 考点位 置 随着 伺 服电机速 度的变化 而成 比例地漂移 ,即参 考 点 不确定 。 目前 , 多数机床采 用栅点 法 。栅 点法 中 , 大 按 照检测元 件测量方 式 的不 同分为 以绝对 脉冲 编 码器方式 回参考点 和 以增量 脉冲 编码 器方 式 回参考点 。在使用绝 对脉 冲编码器作 为测 量反 馈 元件 的系统 中, 床调试 时第 一次 开机后 , 机 通 过参数设 置配合机床 回零操 作调整 到合适 的参 考点后 , 只要绝对 脉冲编码 器的后备 电池有 效 , 此后每次 开机 , 不必进行 回参考 点操作 。在使用
龙门轴调整.doc

检查动态反映适配功能当轴以相同的速度运行时,它们在下列幅度中必须具有相同的错误。
为了转动,有必要稍微调整反馈速度参数的伺服增益以获得最优结果。
龙门轴回零:主动轴和从动轴的回零点必须接近一直。
为了确保龙门轴的同步补偿运动不被自动运行,在第一次启动时,在回零前,必须设置MD 37120:GANTRY_POS_TOL_WARNING为零。
这样可以防止在运动的过程中输出警告信息。
为了防止在主动轴和从动轴由于不共线而导致驱动轴上形成巨大的附加力矩,在轴运动之前两轴必须共线,并且两轴必须回零。
每个龙门轴的零标志和参考点之间的差值必须计算出来并在MD 34080:REFP_MOVE_DIST 和MD 34090: REFP_MOVE_DIST_CORR中调整,这样在补偿运动执行之后,两轴的实际位置值是相同的。
龙门轴:龙门轴同步过程必须由IS “Start gantrysynchronization”来激活。
一旦轴同步,(DB31.DBX101 :IS“Gantry grouping is synchronized”= 1), 就必须检查两轴的尺寸偏差,从而确保此偏差为零。
通过以上数据,可以做些适当的调整。
一旦两轴的零点经过优化,龙门轴就能在同步后保持很好的共线性。
轴的极限报警输入到37110: GANTRY_POS_TOL_WARNING中。
为了作到这一点,必须不断增加数值一直到此数值刚刚低于警报值。
检查加速度时段是非常重要的。
这个极限数值同时也决定同步自动启动控制中的位置偏差。
计算和激活补偿如果龙门轴需要补偿运动(背隙,温度,螺补等),必须计算主动轴和从动轴的补偿数据,并且输入到对应的参数或者表格中。
3.1以上的版本,只能在主动轴上激活再生功能(function generator)和测量功能(measuring function)。
从动轴通过耦合到主动轴的实际值实现自动运动。
如果零速控制可以作用于同步轴,可以临时加大监控注意:3.1以下(含)的版本通过内部监控不能禁止主动和从动轴同时激活再生功能(function generator)和测量功能(measuring function)。
简述回机床参考点的操作步骤

简述回机床参考点的操作步骤
一、回(重)零步骤
1. 开机床上电源,然后输入“G00”指令,使机床进入快速定位状态;
2. 手动操作轴,将机床运动到“回零参考点”处(一般在机床左侧、前侧);
3. 依次输入“G10L20P1”,“G92X0Y0Z0”,“G90”这三条指令,进行机床回零、设置回零参考点及切换到绝对坐标模式;
4. 依次输入“G54X[X坐标]Y[Y坐标]Z[Z坐标]”,依照实际情况输入定义好的所有工作参考点坐标;
5. 然后输入“G28U0W0”指定定位到参考点,再输入“G00X[X
坐标]Y[Y坐标]Z[Z坐标]”指令,使机床定位到各参考点,即完成回零参考点的设置;
6. 结束回零操作,输入“G28U0W0”指令,使机床复位到“0”点。
二、切换参考点步骤:
1. 运行到当前参考点的位置,依次输入“G00G53Z0”,
“G92X0Y0Z0”,“G90”,“G54”;
2. 手动操作轴,将机床移动到需要切换的参考点的位置;
3. 依次输入“G28U0W0”,“G00X[X坐标]Y[Y坐标]Z[Z坐标]”,使机床重新定位到指定坐标,完成参考点的切换;
4. 再次输入“G28U0W0”指令,使机床复位到“0”点。
数控机床回参考点的过程和寻找方式

数控机床回参考点的过程和寻找方式
一、数控机床回参考点的过程:
数控机床的回参考点时根据检测元件的不同分绝对脉冲编码器方式和增量脉冲编码器方式两种,使用绝对脉冲编码器作为反馈元件的系统,在机床安装调试后,正常使用过程中,只要绝对脉冲编码器的后备电池有效,此后的每次开机,都不必再进行回参考点操作。
采用何种方式或如何运动,系统都是通过PLC的程序编制和数控系统的机床参数设定决定的,轴的运动速度也是在机床参数中设定的,数控机床回参考点的过程是 PLC系统与数控系统配合完成的,由数控系统给出回零命令,然后轴按预定方向运动,压向零点开关(或脱离零点开关)后,PLC向数控系统发出减速信号,数控系统按预定方向减速运动,由测量系统接收零点脉冲,收到第一个脉冲后,设计坐标值。
所有的轴都找到参考点后,回参考点的过程结束。
二、数控机床寻找参考点的方式:
而使用增量脉冲编码器的系统中,机床每次开机后都必须首先进行回参考点操作,以确定机床的坐标原点,寻找参考点主要与零点开关、编码器或光栅尺的零点脉冲有关,一般有两种方式。
1)轴向预定点方向快速运动,挡块压下零点开关后减速向前继续运动,直到挡块脱离零点开关后,数控系统开始寻找零点,当接收到第一个零点脉冲时,便以确定参考点位置。
配FANUC系统和北京KND系统的机床目前一般采用此种回零方式。
2)轴快速按预定方向运动,挡块压向零点开关后,反向减速运动,当又脱离零点开关时,轴再改变方向,向参考点方向移动,当挡块再次压下零点开关时,数控系统开始寻找零点,当接收到第一个零点脉冲,便以确定参考点位置。
配SIEMENS、美国AB系统及华中系统的机床一般采用这种回零方式。
数控车床返回参考点操作及注意事项.

Produced by Miss Xie
数控车床返回参考点操作及注意事项
四、返回参考点前注意事项 (一)、看机床是否工作正常,开机后日常保养项目是否正常
(二)、回参考点过程中是否有干涉
Produced by Miss Xie
数控车床返回参考点操作及注意事项
五、数控车返回参考点步骤
(一)、按下手动和 回参考点按钮
Produced by Miss Xie
数控车床返回参考点操作及注意事项
二、返回参考点作用 目的为建立机床坐标系,知道机床原点的位置 三、不返回参考点的机床类型 (一)、反馈装置是增量编码器的需要返回参考点, 系统断电后 不记忆坐标值。 (二)、反馈装置是绝对编码器的启动不需要返回 参考点,系统断电后 靠电池记忆坐标值。
(二)、先回X轴零点, 按X轴正方向直至X轴 回零灯亮起
Produced by Miss Xie
数控车床返回参考点操作及注意事项
五、数控车返回参考点步骤
(三)、回Z轴零点, 按Z轴正方向直至Z轴 回零灯亮起
(四)、看屏幕面板, 各轴坐标回到参考点 位置
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
数控车床返回参考点操作及注意事项
Produced by Miss Xie
数控车床返回参考点操作及注意事项
一 二
机床参考点 返回参考点的作用 不返回参考点的机床类型 返回参考点前的注意事项 数控车返回参考点步骤
三 四 五
Produced by Miss Xie
数控车床返回参考点操作及注意事项
一、机床参考点 机床参考点是用于对机床运动进行检测和控制的固定位置 点。 机床参考点的位置是由机床制造厂家在每个进给轴上用限位 开关精确 调整好的,坐标值已输入数控系统中。 因此参考点对机床原点的坐标是一个已知数。 通常在数控铣床上机床原点和机床参考点是重合的;而在数 控车床上机床 参考点是离机床原点最远的极限点。 数控机床开机时,必须先确定机床原点,即刀架返回参考点 的操作。
数控机床回参考点故障分析与排除
数控机床回参考点故障分析与排除-轻松数控网2012-11-08 | 阅:1 转:90| 分享修改数控机床回参考点摘要:本文分析了数控机床返回参考点的原理,结合具体数控机床事例,对故障各种形式进行分析、诊断及排除,并提出了对加工中心机床换刀点的改进意见。
关键词:数控机床;参考点;故障诊断;排除0前言手动回参考点操作是建立机床坐标系的前提,绝大多数数控机床开机后的第一动作一般都是手动操作回参考点。
若回参考点出现故障将无法进行程序加工,回参考点的位置不准确将影响到加工精度,甚至出现撞车事故。
分析和排除回参考点故障问题是非常必要的。
1 返回参考点的原理数控机床按照控制理论可分为闭环、半闭环、开环系统。
闭环数控系统装有检测最终直线位移的反馈装置,半闭环数控系统的位置测量装置安装在伺服电动机转动轴上或丝杆的端部,也就是说反馈信号取自角位移,而开环数控系统不带位置检测反馈装置。
对于闭环、半闭环数控系统,通常利用位移检测反馈装置脉冲编码器或光栅尺进行回参考点定位,即栅格法回参考点。
而开环系统则需另外加装检测元件,通常利用磁感应开关回参考点定位,即磁开关法回参考点。
无论采用哪种回参考点操作,为保证准确定位,在到达参考点之前必须使数控机床的伺服系统自动减速,因此在多数数控机床上安装减速挡块及相应的检测元件。
栅格法根据检测反馈元件计量方法的不同又可分为绝对栅格法和增量栅格法。
采用绝对脉冲编码器或光栅尺回参考点的称为绝对栅格法,在机床调试时,通过参数设置和机床回零操作确定参考点,只要检测反馈元件的后备电池有效,此后每次开机,均记录有参考点位置信息,因而不必再进行回参考点操作。
采用增量式编码器或光栅尺回参考点的称为增量栅格法,在每次开机时都需要回参考点。
不同数控系统返回参考点的动作、细节有所不同,图1中以某数控铣床(采用FANUC 0i 系统)为例,简要叙述增量栅格法返回零点的原理和过程。
在图1中,快速进给速度参数、慢速进给速度参数、加减速时间常数、栅格偏移量等参数分别由数控系统的相应参数设定。
浅谈数控机床回参考点方式及故障诊断
浅谈数控机床回参考点方式及故障诊断倪琳引言:回零是指数控机床在接通电源后,必须让各种坐标轴回到机床一固定点上,也称参考点。
使机床回到这一固定点的操作称回参考点或回零操作。
为什么数控机床要进行回参考点或回零操作?系统断电后,工件坐标系的坐标值就失去记忆,机械坐标值尽管靠电池维持坐标值的记忆,但只是记忆机床断电前的坐标值而不是机床的实际位臵。
所以在增量脉冲编码器的位臵检测系统中,控制系统启动后,所有的轴都要回一次参考点,以便校正行程测量系统,确定机床原点位臵,并重新获得准确的位臵值。
但在绝对脉冲编码器的位臵检测系统中,回参考点是没有必要的,因为系统每一瞬间都可以直接读出运动轴的准确坐标值。
关键词:数控机床回零方式、回参考点故障诊断1.数控机床回零方式要想能够对数控机床回参考点的故障进行诊断,首先要对数控机床回参考点工作原理进行分析,或者说对回参考点的方式、方法进行认知和理解。
回参考点的方式因数控系统类型和机床厂家不同而不尽相同。
按机床检测元件检测原点信号方式的不同,数控机床回参考点的方法有两种:1.磁开关法:在机械本体上安装磁铁及磁感应原点开关或者接近开关,当磁感应开关或接近开关检测到原点信号后,伺服电机立即停止运行,该停止点被认为原点。
2.栅格法:检测元件随着电动机一转信号同时产生一个栅格或一个零位脉冲;在机械本体上安装一个减速挡块及一个减速开关,当减速挡块压下减速开关时,伺服电机减速到接近原点速度运行。
减速挡块离开减速开关时,即释放开关后,数控系统检测到的第一个栅格或零位信号即为原点。
在栅格法中按照检测元件的不同又可分为:(1)以绝对脉冲编码器方式回零在以使用绝对脉冲编码器作为测量反馈元器件的系统中,机床调试时第一次开机后,通过参数设臵配合机床回零操作调整到合适的参考点,只要绝对脉冲编码器的后备电池有效,此后每次开机,不必进行回参考点操作。
(2)以增量脉冲编码器方式回零在以使用增量脉冲编码器作为测量反馈元器件的系统中,回参考点有两种方式,一种是开机后在参考点回零模式下直接回零;另一种是在存储器模式下,第一次开机手动回原点,以后均可用G代码方式回零。
维修中840D系统常见到的问题
840D系统在维修中的问题1:装载标准机床数据;正常情况下在PCU50上服务———数据输入——文档或NC卡的备份NC 数据回装到PCU50上。
正常情况下,有的厂家用PLC 控制数据通信,在回装时回出现通信故障,就要清除PLC数据然后再回装NC数据在有些时候回装NC数据时会报警为“至少一个轴模块未被发现”因为缺省值关系没有回装进去,重复回装NC数据能解决此问题。
PLC 总清操作步骤如下:(1)将PLC 启动开关S4 “2”;=> PS 灯会亮。
(2)S4 “3”并保持约3 秒直等到PS 灯再次亮;=> PS 灯灭了又再亮。
(3)在3 秒之内,快速地执行下述操作S4:“2”“3”“2”;=> PS 灯先闪,后又亮,PF 灯亮。
(有时PF 灯不亮)(4)等PS 和PF 灯亮了,S4 “0”;=> PS 和PF 灯灭,而PR 灯亮。
PLC 总清执行完成。
如PLC 总清后屏幕上有报警可作一次NCK 复位(热启动)。
NC 总清NC 总清操作步骤如下:(1)将NC 启动开关S3 “1”;(2)启动NC,如NC 已启动,可按一下复位按钮S1;(3)待NC 启动成功,七段显示器显示“6”,将S3 0”;NC 总清执行完成。
NC 总清后,SRAM 内存中的内容被全部清掉,所有机器数据(Machine Data)被预置为缺省值。
2:密码问题:如果条件准许,备份好NC、PLC数据,清NC数据,读回备份数据,此时制造商的密码又是SUNRISE3:取消屏保的方法再系统上按如下步骤操作:startup MMC Editor编辑F:\MMC2\MMC.INI文件中Mmcssreen off time in minutes =5Catency for screen saver 将设定值改为0即可4:PCU50上的USB如何激活HMI的操作系统必须是WINDOWS XP系统需要修改下F:\MMC2\mmc.ini文件,找到其中floppydisk=A改为Floppydisk=G因为系统盘又C D E F 四个驱动器,当U盘插上后,系统自动默认其为G 盘5:880系统的口令?默认的是1 1 1 1 ,如果自己改过但忘记了,可以用下面的指令读出(在MDI或者程序中输入然后执行)@300 R1 K11 此指令是把第11号参数读入R1然后看R1就知道密码?6:西门子带报闸的电机,报闸线圈为直流24V,一般在PLC编制时利用位置环生效控制刹车,当出现急停时,伺服使能关断位置环失效而启动报闸,反之,使能加上后位置环生效报闸打开。
数控机床回参考点过程分析、典型模式和故障分析
数控机床回参考点过程分析、典型模式和故障分析本文分七个小部分,分别介绍了机床原点、机床参考点、工件参考点、回参考点过程、几种典型的模式以及常见的故障分析做了深入的介绍。
一、机床坐标系原点:机床原点为机床上的一个固定点,也称机床零点或机床零位。
是机床制造厂家设置在机床上的一个物理位置,其作用是使机床与系统同步,建立测量机床运动坐标的起始点。
并用M表示。
该点是确定机床参考点的基准。
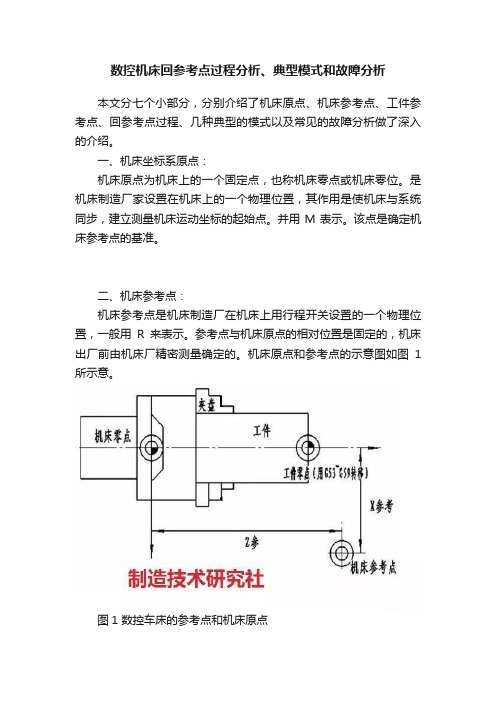
二、机床参考点:机床参考点是机床制造厂在机床上用行程开关设置的一个物理位置,一般用R来表示。
参考点与机床原点的相对位置是固定的,机床出厂前由机床厂精密测量确定的。
机床原点和参考点的示意图如图1所示意。
图1 数控车床的参考点和机床原点一般来说,机床坐标系原点或机床零点是通过机床参考点间接确定的。
机床参考点是机床上的一个固定点,其与机床零点间有一确定的相对位置,一般设置在刀具运动的X、Z正向最大极限位置。
展开剩余85%在机床每次通电之后,工作之前,必须进行回机床零点操作,使刀具运动到机床参考点,其位置由机械档块确定。
这样,通过机床回零操作,确定了机床零点,从而准确地建立机床坐标系,即相当于数控系统内部建立一个以机床零点为坐标原点的机床坐标系。
机床坐标系是机床固有的坐标系,一般情况下,机床坐标系在机床出厂前已经调整好,不允许用户随意变动。
对于铣床来说,有的机床参考点就是原点,有的参考点在最大行程位置。
而对于车床来说,参考点和原点不是同一点,这在图1中显示得十分明显。
三、工件坐标系原点:工件坐标系是用来确定工件几何形体上各要素的位置而设置的坐标系,工件原点的位置是人为设定的,它是由编程人员在编制程序时根据工件的特点选定的,所以也称编程原点。
工件坐标系原点和机床原点是有偏移的,所有的编程都是以工件原点作为原点的,在通过G53,G59来指定偏移。
四、机床回参考点过程:机床回参考点过程在往期文章(《端午节,回家就向数控机床回参考点一样,不需要理由,只需要团聚》)中已经详细说明了,这里再简单回顾一下:1)设置回参考点工作方式;2)选择返回参考点的轴并操作该轴返回参考点,该轴以G00快速向参考点运动;3)当随滑板一起运动的撞块压下参考点开关触头,使其内断(ON)转通(OFF)状态后,机床滑板会减速并按参数设定的速度继续移动。
龙门切削机床坐标标准

龙门切削机床坐标标准龙门切削机床是一种用于金属切削加工的大型机床,具有高刚性和高精度的特点。
为了确保切削机床的准确性和稳定性,需要设置坐标标准,以便在切削加工过程中准确控制工件的位置和形状。
下面将介绍一些与龙门切削机床坐标标准相关的内容。
1. 刀尖坐标系:刀具是进行切削的重要工具,刀尖坐标系是指刀具切削刃尖与零点之间的坐标关系。
在龙门切削机床中,刀具的位置和方向对于加工结果具有很大的影响,因此需要准确标定刀尖坐标系,以便控制刀具的位置和方向。
2. 工件坐标系:工件坐标系是指工件所处的坐标系,用于确定工件的位置和形状。
在龙门切削机床中,工件坐标系通常使用参考点及其与刀尖坐标系的相对位置来确定。
工件坐标系的准确标定对于保证切削加工的精度和稳定性至关重要。
3. 参考点:参考点是用来确定工件坐标系的重要标志物,其位置和选择直接影响工件加工的精度和稳定性。
通常,参考点应具有稳定性和易于识别的特点,如平台的角点、表面的几何特征等。
根据工件的不同特点和加工需求,参考点的选择可能会有所不同。
4. 坐标原点:坐标原点是整个坐标系的起点,用于确定各个坐标轴的位置和方向。
在龙门切削机床中,通常将坐标原点设置在切削区域的中心位置,以便对工件进行全方位的切削加工。
5. 坐标轴方向:坐标轴方向是指坐标系中各个坐标轴的正方向,通常用箭头来表示。
在龙门切削机床中,通常将Z轴设置为切削方向,X轴和Y轴分别对应工件的长度和宽度方向。
6. 坐标系误差:坐标系误差是指切削机床工作中由于各种因素导致的坐标偏差。
由于机床本身的刚度、导轨的精度、传动装置的精度等因素,刀具在加工过程中可能会偏离预定的坐标位置,从而导致工件的尺寸和形状偏差。
为了减小坐标系误差,需要适时进行校正和调整。
7. 校正方法:校正方法是指进行坐标标定和修正的具体操作方式。
通常,校正方法包括机床的调整、工件的固定和定位、刀具的更换和磨削等。
通过校正方法可以减小坐标系误差,提高切削机床的加工精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙门轴回参考点
龙门轴回参考点的过程,以距离编码光栅尺为例:
1.选择JOG-REF方式进行回参考点,主动轴先回参考点,从动轴跟随主动轴移动。
2.主动轴找到参考点后,从动轴开始回参考点,主动轴跟随从动轴移动。
如果回参考点时向负方向移动的话,主动轴找到参考点后,从动轴找参考的的过程会向正方向运动,如果是从正方向回参考的的话,从动轴的回参考点过程也是往正方向移动找参考点。
注意主动轴找到参考点后,从动轴自动进行,此时可松开“-”或“+”按键。
3.在主动轴和从动轴均找到参考点后,如果两个轴的坐标误差值在参数37110所设置的误差范围内的话,龙门轴中的两个轴会自动移动至两个轴的坐标位置相同的位置,此时回参考点结束。
4.如果在龙门轴的两个轴均以回参考点后的差值大于参数37110所设置的误差值的话,此时会显示“等待龙门轴同步的启动”,此时将PLC信号DB31…DBX29.4置“1”,龙门轴开始启动同步过程,如果不将DB31…DBX29.4置“1”,龙门轴则无法进行同步。
5.龙门轴回参考点结束后信号DB31…DBX101.5变为“1”,表示龙门轴已经同步。